
Abstract
The three-dimensional (3-D) linear analytical comparison is made for axial flux machines (AFMs) with surface-mounted non-layered/layered and segmented Halbach magnets. Using a 3-D subdomain model method, the analytical equations in terms of the scalar potential for different subdomains are solved. In addition, the magnet parameters are optimized to enhance the performance of AFMs. It is well demonstrated that the optimized AFM with the radially layered unequal-height Halbach magnets exhibit better performance than that with the other magnet arrangements. Finally, the proposed 3-D linear analytical predictions are validated through a 3-D finite element analysis (FEA).
Keywords
Introduction
Axial flux machines (AFMs) with permanent magnets have the advantages of relatively compact structure, low loss, high torque and power density. Thus they have a wide range of industrial and agricultural applications in the aerospace, national defense, transportation, and public life (Jin et al., 2015; Zhao et al., 2014).
AFMs can be classified by the topological structures, i.e., single-stator single-rotor, double-stator single-rotor, single-stator double-rotor, and multi-stator multi-rotor (Kahourzade et al., 2014; Nishanth et al., 2021). In order to reduce the unilateral magnetic force, the two-sided structure with the middle stator or rotor is the most widely used one (Gieras et al., 2008). Compared with the single-stator double-rotor AFM, the double-stator single-rotor AFM with flexibility design can use the magnetic field interaction generated by the two stators to increase the torque output, thus making it more advantageous in some specific applications with relatively high requirements (Ge et al., 2022).
In recent years, the academic research on the Halbach arrays for AFMs has aroused the widespread interest. Compared with the AFMs without Halbach arrays, AFMs with Halbach arrays offer many attractive advantages. The Halbach array is utilized for an AFM in (Habib et al., 2022), the magnet shape is optimized to obtain the higher performance. A high-speed Halbach-array rotor for ironless AFM is proposed and investigated in (Zhang et al., 2020). A kind of AFM with multi-segment Halbach array is proposed in (Okita & Harada, 2023). In order to increase the torque density, the combination of Halbach arrays is presented for the AFM with yokeless and segmented armature in (Lu et al., 2024). A novel magnet structure combining the block, trapezoidal and Halbach magnets is proposed and greatly increase the airgap flux density performance in (Yang et al., 2021). A novel radially layered magnet structure with tangentially magnetized magnets and radial Halbach array in parallel excitation is proposed in (Wang et al., 2021). The internal space is effectively utilized and the output performance is improved with the same main magnetic flux area.
Generally, a three-dimensional (3-D) finite element analysis (FEA) method can be used to solve the magnetic field in AFMs (Geng & Zhang, 2018; Sun et al., 2020). However, both the calculation and optimization of the 3-D FEA model often take a long time (Habib et al., 2022). Instead, the analytical method is preferred to predict the performances of the 3-D field AFMs. The analytical methods for the AFMs using a quasi-3D model or the dimensionality reduction processing not only have higher computational complexity and lead to great restrictions on the 3-D structure, but also have a relatively lower calculation accuracy (Sun et al., 2018; Zerioul et al., 2018). A 3-D analytical AFM model with the conventional magnet structure is proposed in (Jin et al., 2014), and the analytical formulas are presented to accurately gain the 3-D field parameters. For the 3-D analytical model of AFMs with Halbach arrays, the Fourier-Bessel equation is used to provide a more rigorous and widely applicable expression for the magnetic field, back electromotive force and torque (Jin et al., 2015; Okita & Harada, 2023).
In this paper, the AFM models with layered and segmented Halbach magnets are proposed and compared. All the compared AFMs are double-stator single-rotor arrangements. Using a 3-D analytical method, the electromagnetic performances of the slotted AFMs are analyzed, and the magnet parameter variables are optimized. With the equal remanence per unit volume for the magnets, the electromagnetic performance of the optimized model with radially layered and circumferentially segmented is obviously better than that of the other models. Finally, a 3-D FEA model is used to compare and verify the analytical prediction results.
AFM Physical Model
Figure 1(a)–(d) show four rotor structures of AFMs with different segmented Halbach magnet arrangements. Figure 1(a) shows the single-layer equal-height Halbach magnets with the same remanence for Machine I. Figure 1(b) shows the single-layer unequal-height Halbach magnets for Machine II. Figure 1(c) shows the proposed axially layered unequal-height Halbach magnets for Machine III. Figure 1(d) shows the proposed radially layered unequal-height Halbach magnets for Machine IV. It is noted that the three-segment magnets (i.e., each pole magnets) in Machines II, III and IV have different remanences and different magnetization angles. For a fair comparison, they share the same magnet remanence per unit volume.
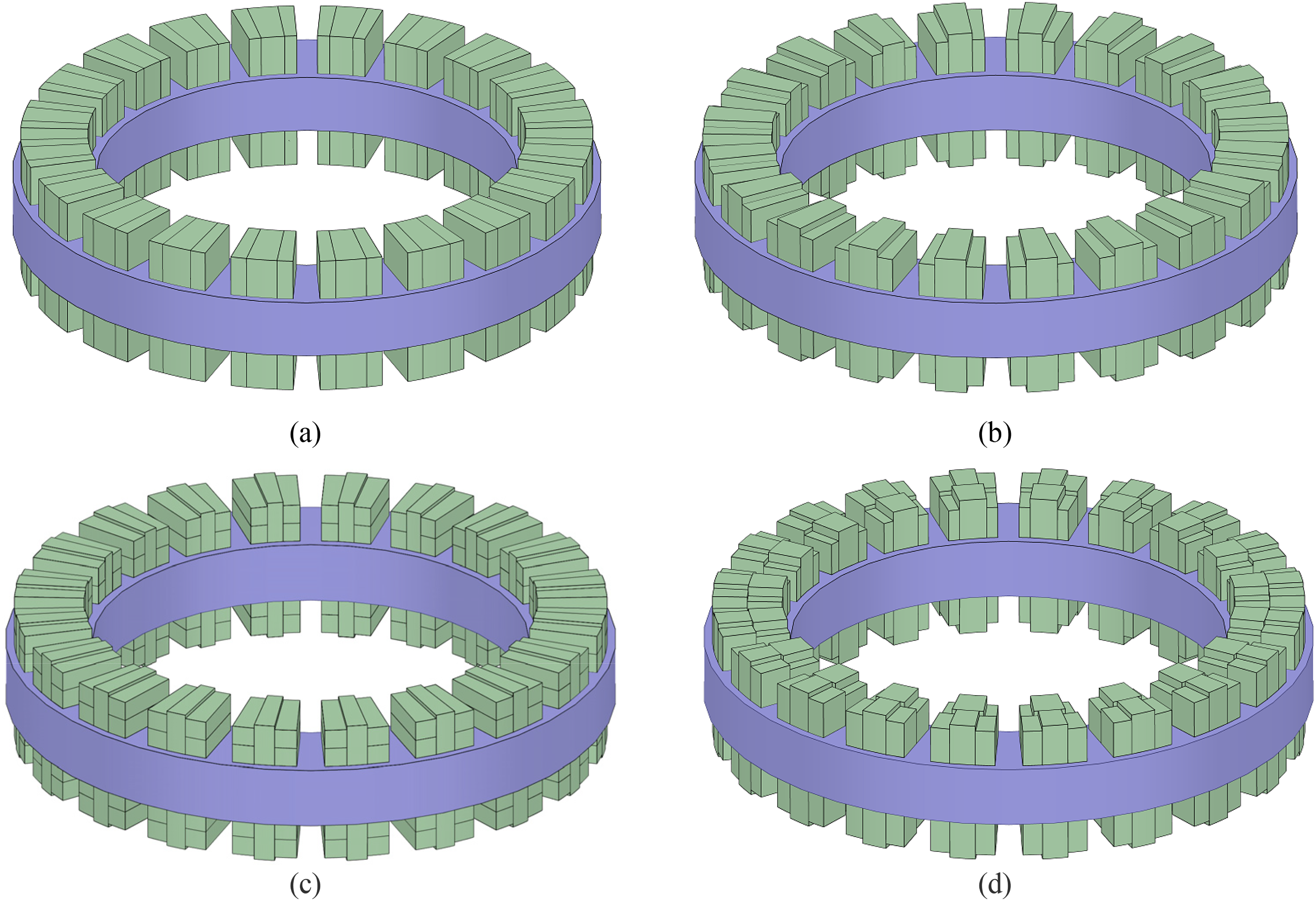
Four types of rotor PM arrangements. (a) Single-layer equal-height Halbach magnets for Machine I. (b) Single-layer unequal-height Halbach magnets for Machine II. (c) Proposed axially layered unequal-height Halbach magnets for Machine III. (d) Proposed radially layered unequal-height Halbach magnets for Machine IV.
Figure 2 shows the stator and rotor of a 3-D AFM with radially layered unequal-height Halbach magnets. The double-stator single-rotor arrangement is used.
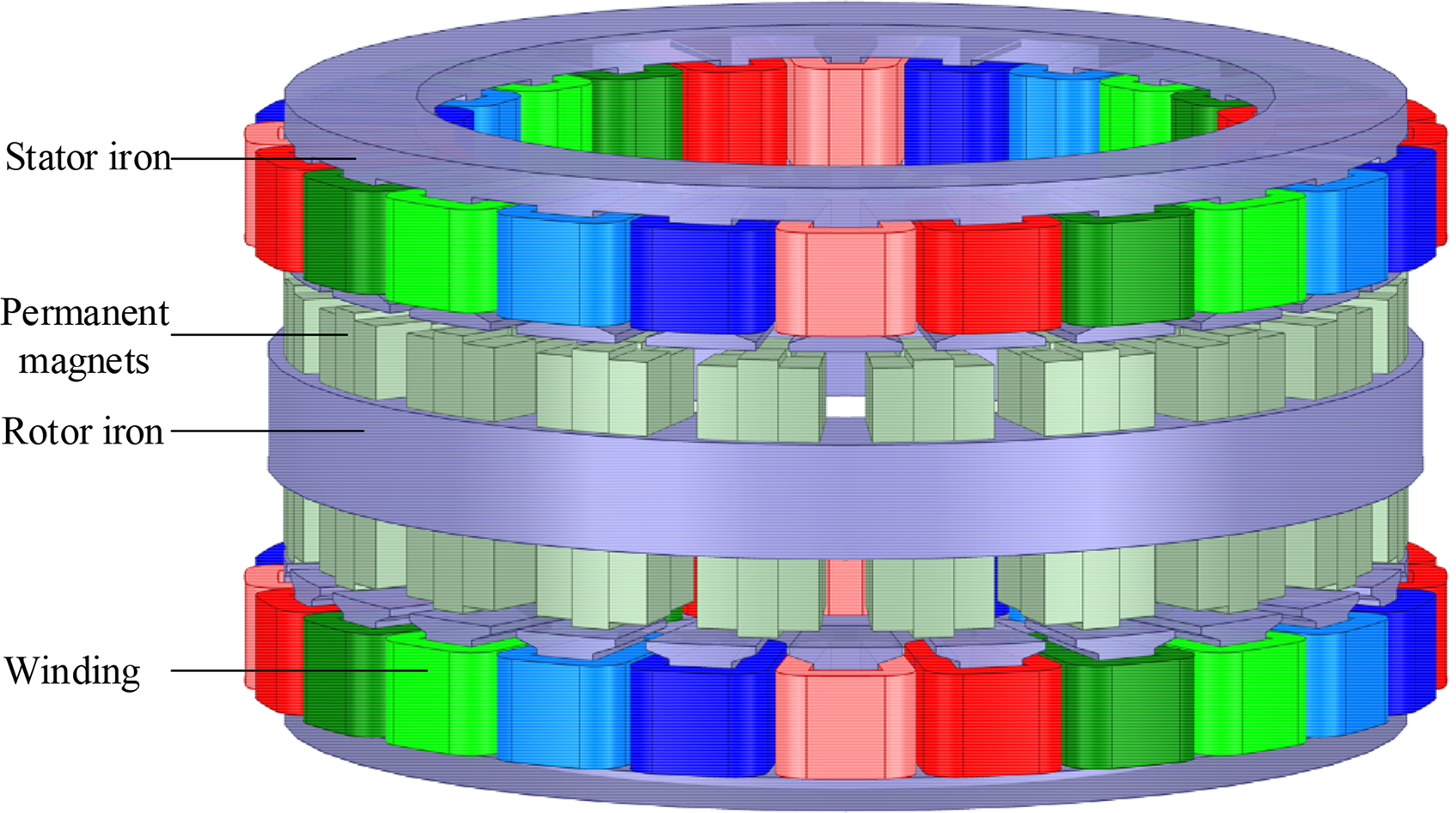
Stator and rotor of 3-D AFM with radially layered unequal-height Halbach magnets.
Figure 3 shows the rotor geometric parameters of the AFM from the top view. The inner and outer layer magnet arrays have the same arc angle. Rr1 and Rr2 are the inner/outer radii of the rotor iron. Rm1, Rm2 and Rm3 are the inner radius of the inner layer magnet array, the outer radius of the inner layer magnet array (i.e., the inner radius of the outer layer magnet array) and the outer radius of the outer layer magnet array, respectively. β1 is the pole pitch, β2 is the arc angle of the three-segment Halbach magnet array, β3 is the arc angle of the inner layer mid-magnet, and β4 is the arc angle of the outer layer mid-magnet. α1 = β2/β1 is the polar arc ratio, α2 = β3/β2 and α3 = β4/β2 are the ratios of the inner and outer layer mid-magnet to the three-segment magnets, respectively.
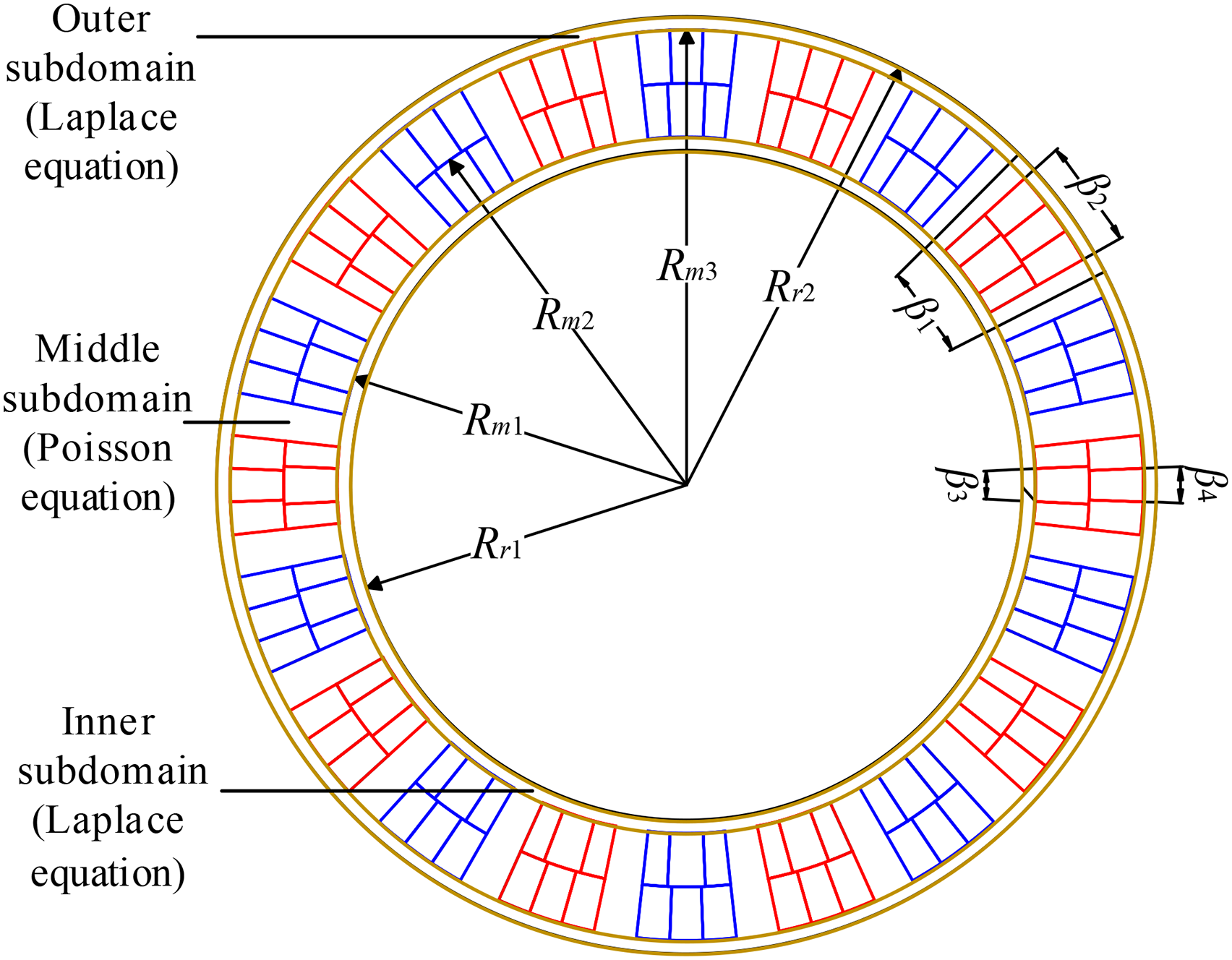
Rotor geometric parameters from the top view.
Figure 4 shows the parameters of outer and inner layers of the proposed radially layered model. The remanences of the mid-magnet and side-magnet are unequal. h1 is the axial thickness of the mid-magnet, h2 is the axial thickness of the rotor iron, h3 and h4 are the axial lengths of the outer and inner layer magnet, respectively. g1 is the airgap length between the stator and the mid-magnets, g2 and g3 are the airgap lengths between the stator and the outer/inner layer side-magnets, respectively. θ1 and θ2 are two magnetization angles of the outer/inner layer side-magnets, respectively.
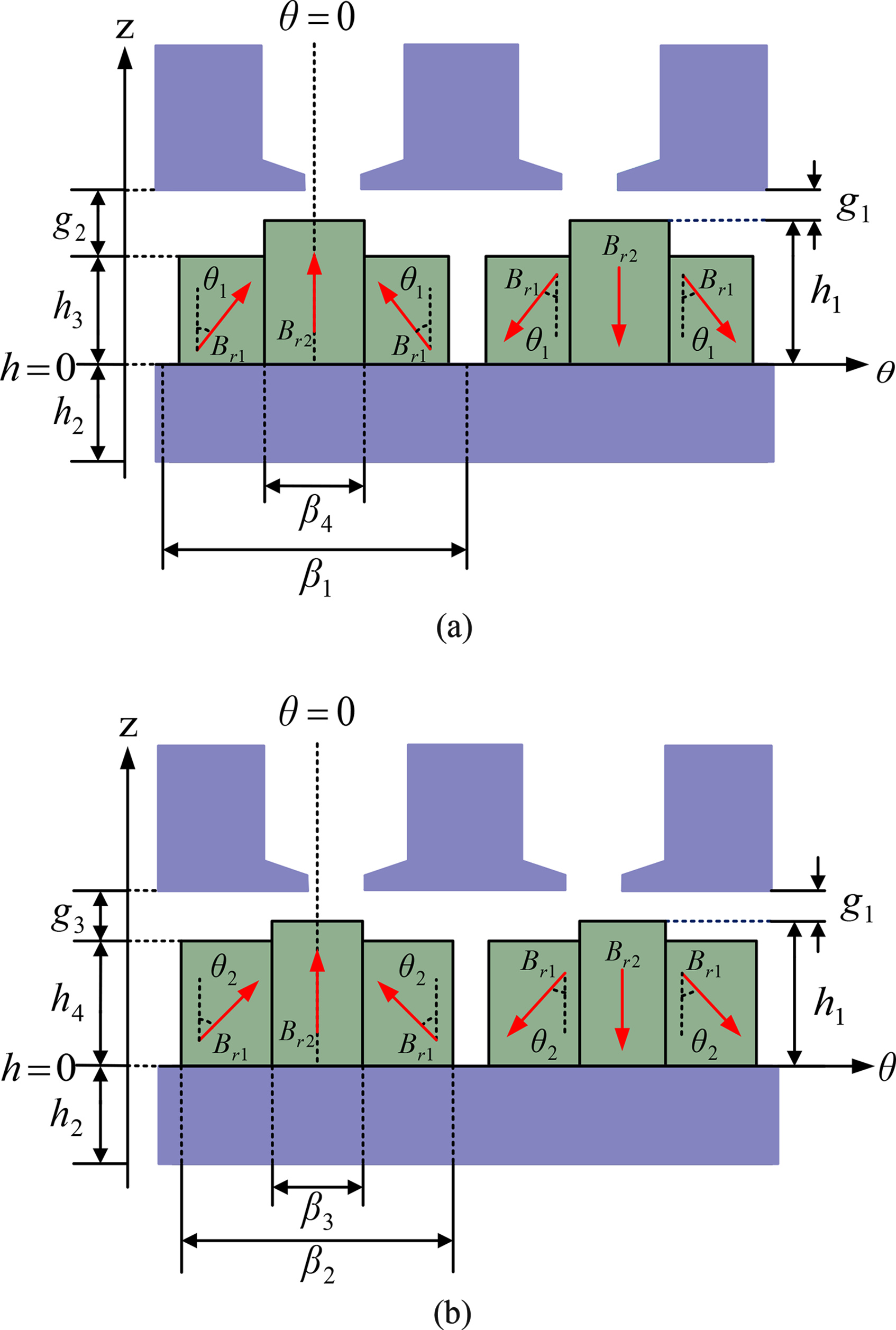
Parameters of outer and inner layers. (a) Outer layer. (b) Inner layer.
General Solution Equations for Subdomains
The initial spatial positions of analytical calculation are defined as θ = 0 and h = 0. The whole 3-D space is divided into four regions. In order to solve the 3-D field, general assumptions need to be made: ideal linear demagnetization of the magnets, the infinite permeability of the iron, and ignored the end effect of the windings along the longitudinal axis of the machine. The magnetic field intensity


Since the outer and inner layer magnets are independent, the superposition method is used. According to (1)–(2), the Poisson and Laplace equations of each subdomain in terms of the scalar potential can be solved.
Inner Subdomain Equation in Terms of Scalar Potential
The governing Laplace equation with the scalar potential φ1(r, θ, z) in cylindrical coordinates can be written as

Middle Subdomain Equation in Terms of Scalar Potential
Due to the remanences of the mid-magnet and side-magnet in the middle subdomain are different, the middle subdomain is divided into magnetization systems 1 and 2, in which the magnetization
The three magnetization components of the mid-magnet in magnetization system 1 are expressed as
According to the mirror symmetry, the three magnetization components of the symmetric mid-magnet in magnetization system 1 can be given as
The three magnetization components of the side-magnets in magnetization system 2 is expressed as
According to the mirror symmetry, the three magnetization components of the symmetric side-magnets in magnetization system 2 can be given as
The three magnetization components of magnetization systems 1 and 2 are both decomposed by the double Fourier. The total magnetization of the middle subdomain can be derived as

The governing Poisson equation with the scalar potential φ2(r, θ, z) in cylindrical coordinates can be written as

Outer Subdomain Equation in Terms of Scalar Potential
The governing Laplace equation with the scalar potential φ3(r, θ, z) in cylindrical coordinates can be written as

Determination of Equation Coefficients
In the analytical equations with the scalar potential in different subdomains, there are six unknown coefficients Cmn, Dmn, Emn, Fmn, Gmn and Jmn. They can be only determined by the boundary conditions.
Boundary Conditions at r = Rm2
At the interface between the inner and middle subdomains (r = Rm2), the magnetic flux density and the magnetic field strength are expressed as

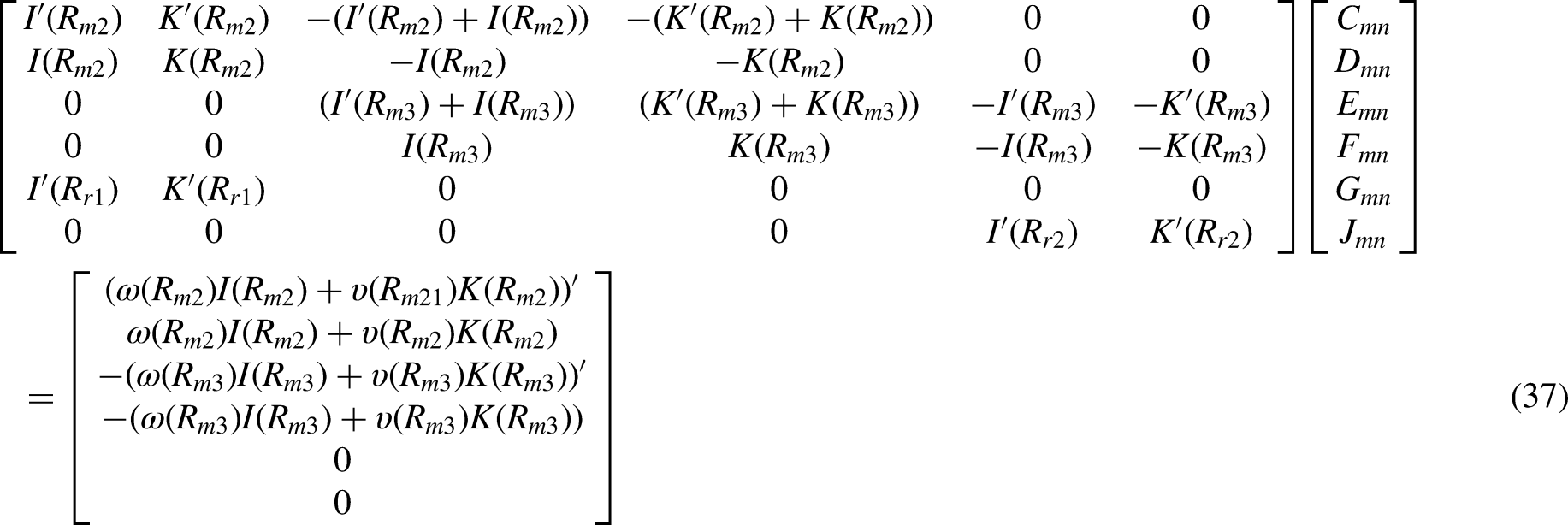
According to (29), substituting (4), (25) into (1)–(2), the equations can be written as

Boundary Conditions at r = Rm3
At the interface between the middle and outer subdomains (r = Rm3), the magnetic flux density and the magnetic field strength are satisfied as

According to (31), substituting (25), (28) into (1)–(2), the equations can be solved as

Boundary Conditions at r = Rr1 and r = Rr2
At the interfaces between the inner/outer subdomains and the air (r = Rr1 and r = Rr2), the radial component of the flux density is zero, i.e.,


Analytical Performance of Slotted AFM
Based on the analytically obtained slotless magnetic field, considering the slotting effect, a Carter's coefficient is used for calculation of equivalent airgap length.
The equivalent airgap lengths in different paths are calculated as

The total equivalent airgap length ge is

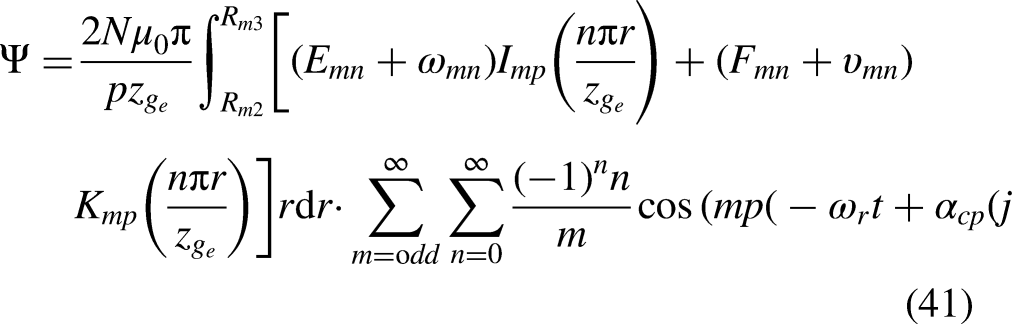
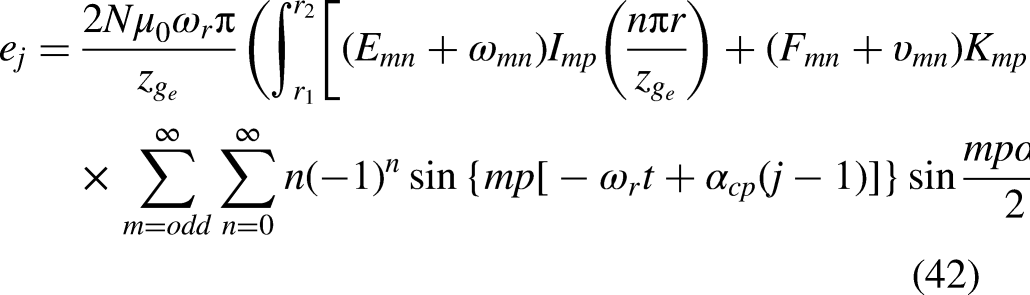
The back electromotive force (EMF) of each phase in the j-th coil is calculated as

Coil distribution of a 20-pole/24-slot AFM.
According to the 24-slot stator, three back electromotive forces can be obtained as

It is noted that the foregoing analytical process is applied for the outer layer magnets. Since the analytical process for the inner layer magnets is similar, it is not presented for conciseness. Using the superposition method, these electromagnetic parameters for the proposed AFM can be analytically obtained.
Analytical Result Comparison and Verification
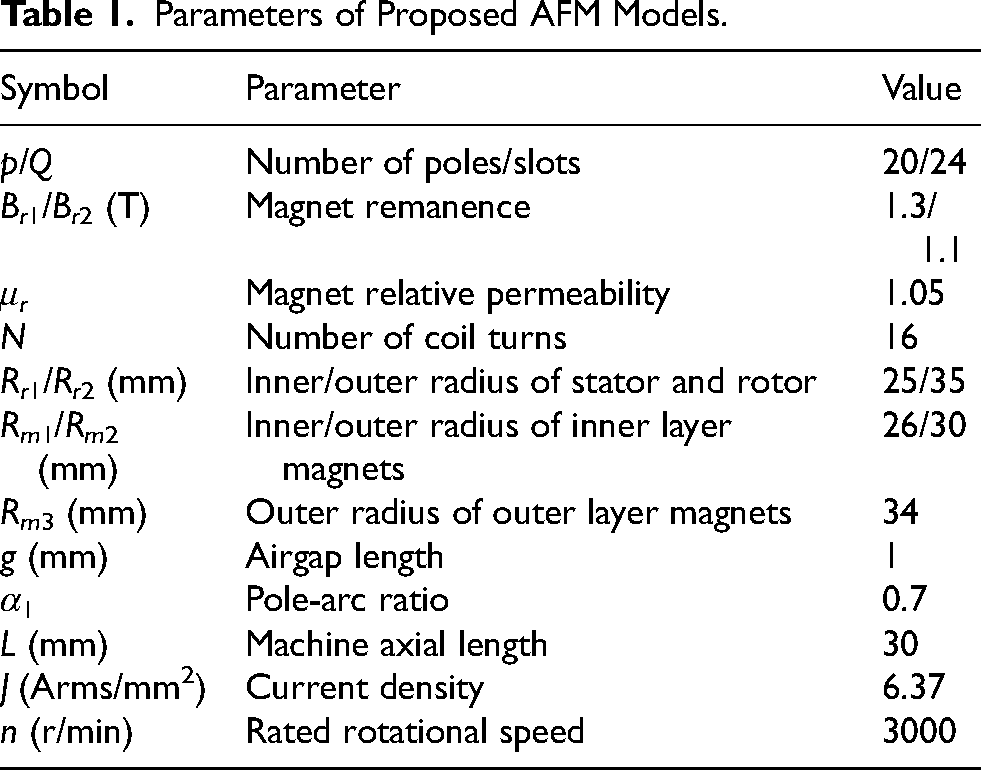
Using the analytical equations presented in Sections 3 to 5, the performances of the AFMs with surface-mounted non-layered/layered and segmented Halbach magnets are compared. Table 1 gives the main parameters of the AFMs. For the fair comparison, the remanence per unit volume of the magnet usage is the same for all the compared AFMs.
Parameters of Proposed AFM Models.
For the proposed Machine IV, the magnetization angle θ1 and the ratio α3 of the outer layer magnets, the magnetization angle θ2 and the ratio α2 of the inner layer magnets influence the electromagnetic torque. These four parameters are chosen as the optimization variables. The optimization object is the maximum electromagnetic torque. The average electromagnetic torque against θ1 and α3, θ2 and α2 is shown in Figure 6. It can be easily obtained that the optimized results are θ1 = 29°, α3 = 0.54, θ2 = 34° and α2 = 0.48.
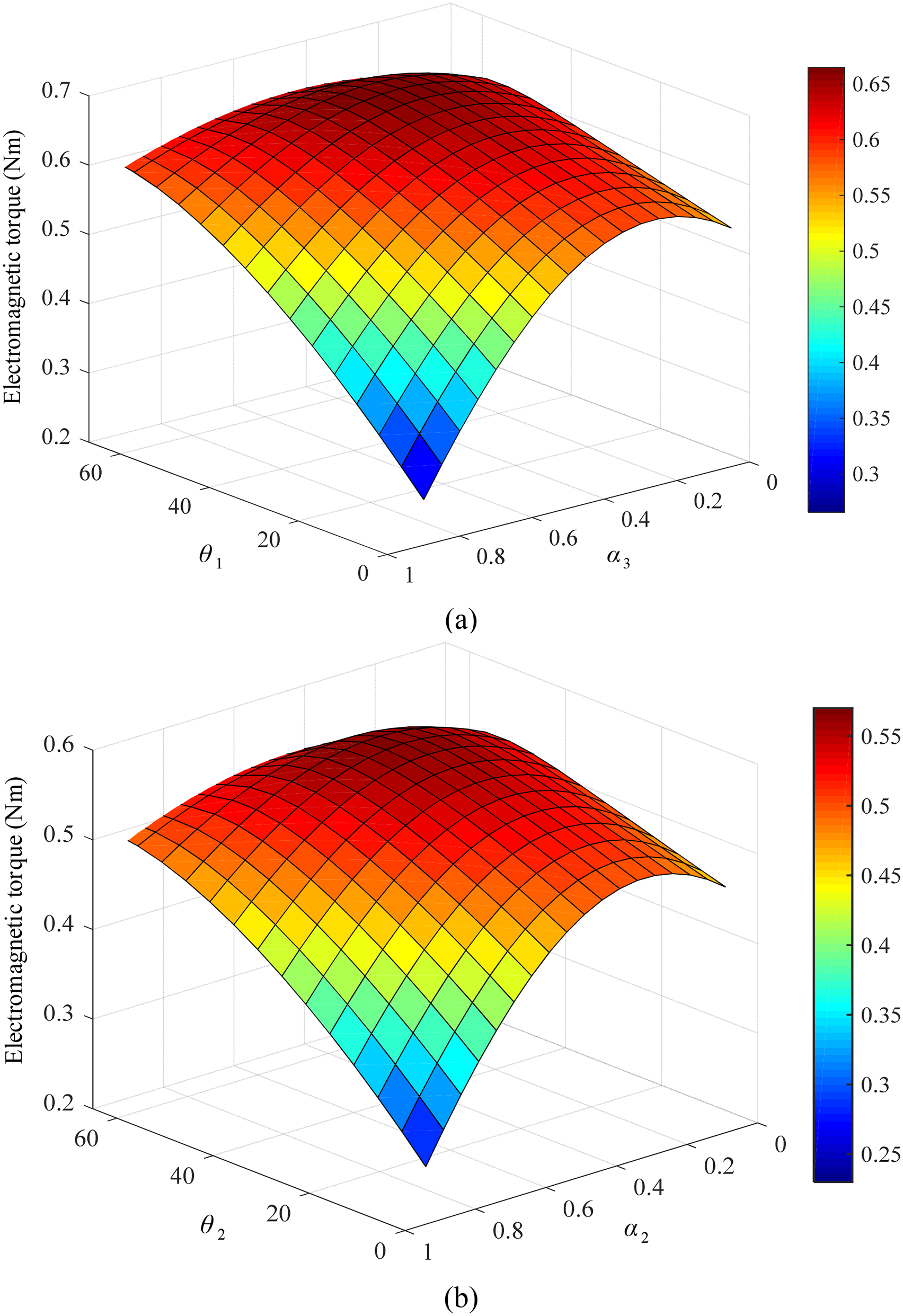
Analytical electromagnetic torque against different variables for proposed machine IV with outer/inner magnets. (a) Torque against with θ1 and α3 for outer layer magnets. (b) Torque against with θ2 and α2 for inner layer magnets.
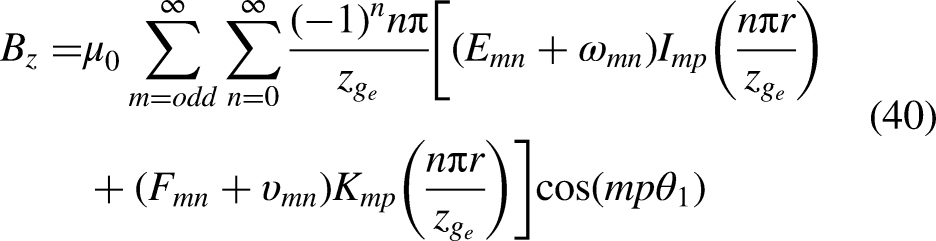
Figure 7(a) compares the 3-D analytically predicted airgap flux density waveforms of four AFMs. It can be clearly seen that the proposed Machine IV has the best waveform with the maximum value 1.29 T and the proposed Machine III has the second best waveform. Figure 7(b) shows the comparison of the 3-D analytical and FEA airgap flux density waveforms of proposed optimized Machine IV. It can be clearly observed that the two waveforms of the optimized 3-D analytical and FEA models for proposed Machine IV are well matched.
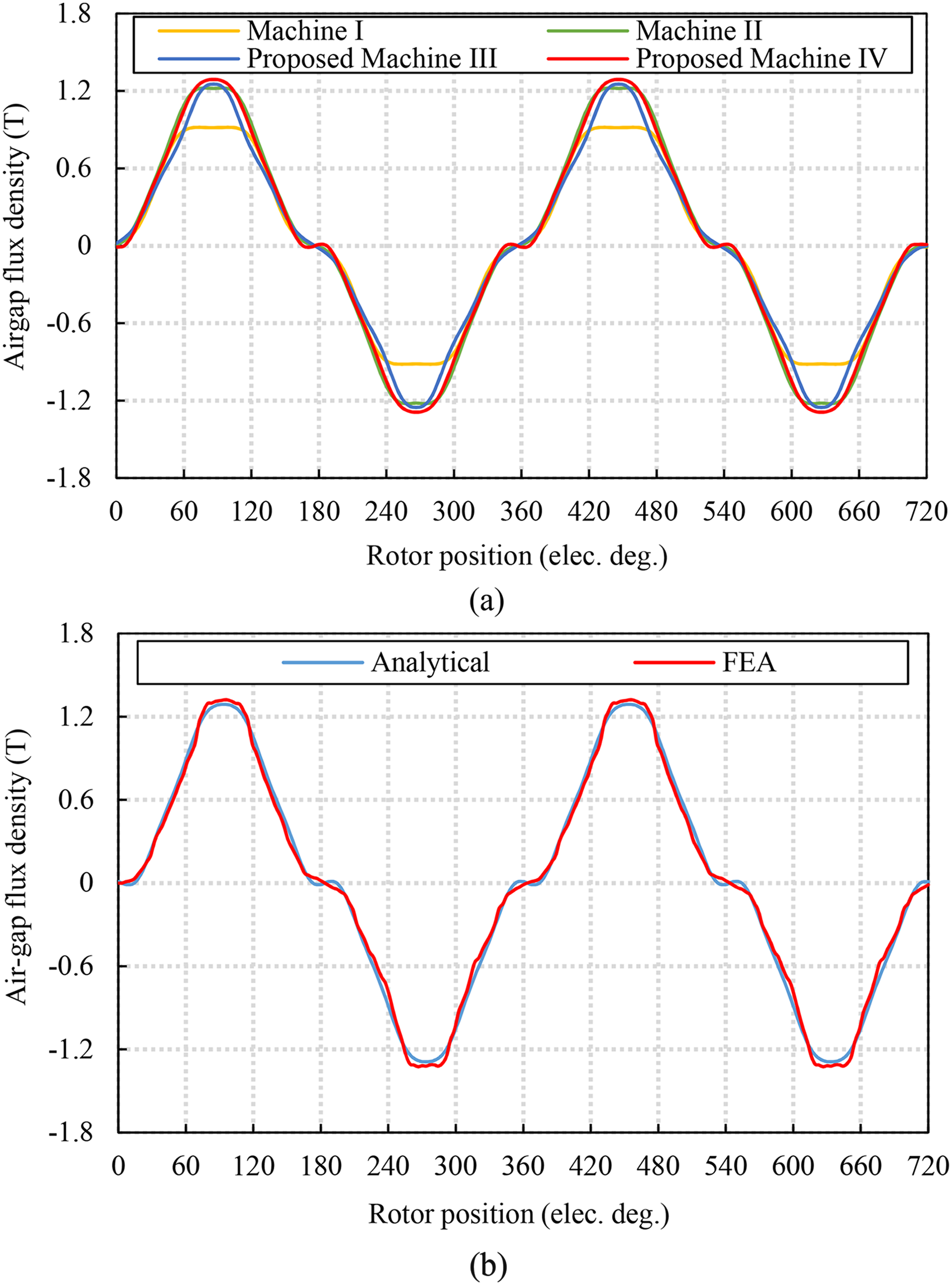
Comparison of airgap flux density waveforms. (a) Comparison of 3-D analytically predicted flux density waveforms of four AFMs. (b) Comparison of 3-D analytical and FEA flux density waveforms of proposed optimized Machine IV.
Figure 8(a) shows the analytical comparison of phase back-EMF waveforms of four AFMs. The maximum waveform values for Machines I, II, III and IV are 32.7, 37.3, 38.4 and 39.13 V, respectively. Figure 8(b) shows the corresponding harmonic comparison of four back-EMF waveforms. The fundamental component values of four AFMs are 31.15, 34.42, 35.54 and 36.86 V, respectively. It can be clearly seen that the proposed Machine IV has the best fundamental value and the proposed Machine III has the second best fundamental value. As shown in Figure 8(c), there is an excellent agreement between the 3-D analytical and FEA back-EMF waveforms of proposed optimized Machine IV.
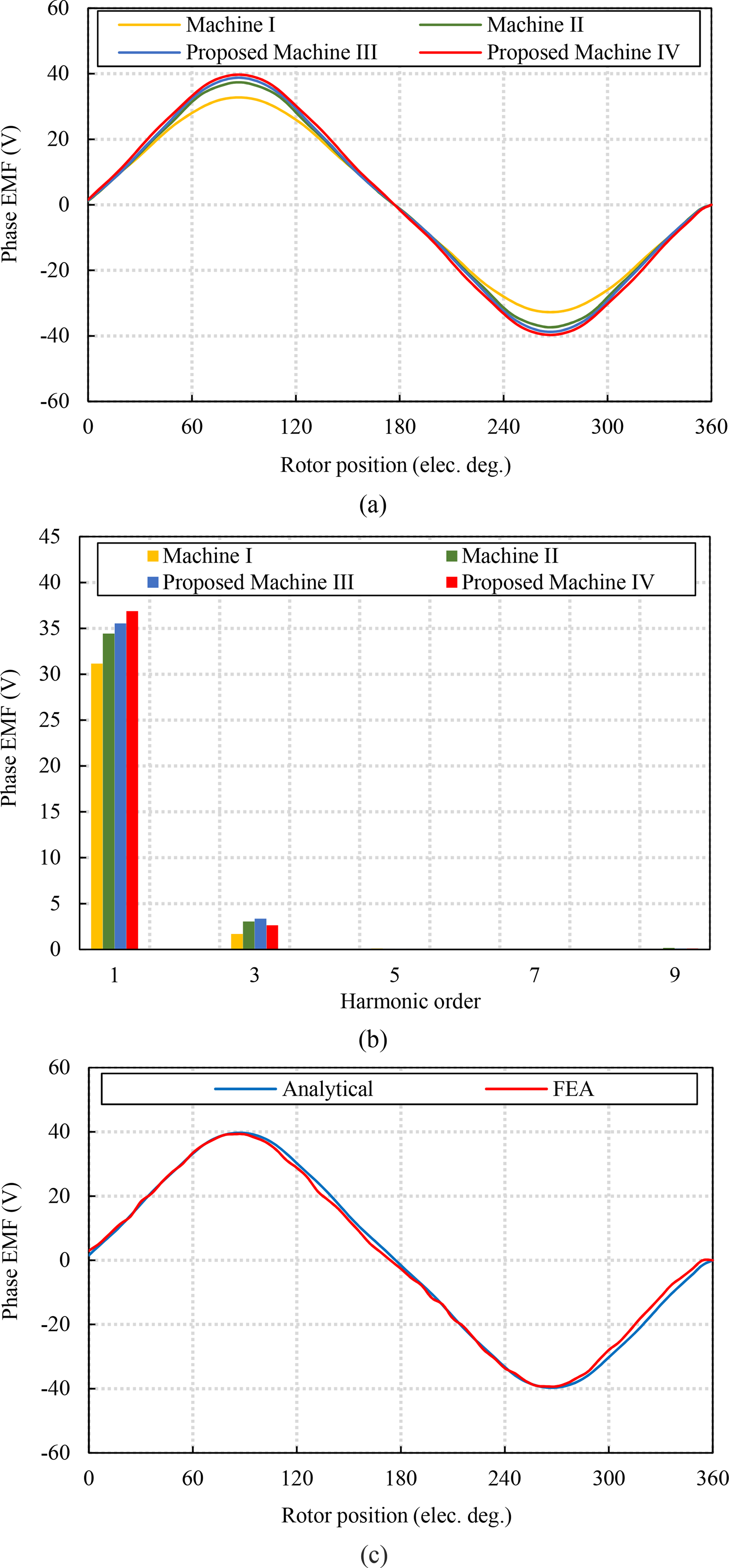
Comparison of phase back-EMF waveforms. (a) Comparison of 3-D analytical back-EMF waveforms of four AFMs. (b) Comparison of harmonics of back-EMF waveforms of four AFMs. (c) Comparison of 3-D analytical and FEA back-EMF waveforms of proposed optimized Machine IV.
Electromagnetic torque is one critical output properties in the motor operation. Figure 9(a) shows the analytical electromagnetic torque waveforms of the four compared AFMs. The average electromagnetic torque values are 1.047, 1.183, 1.208 and 1.227 Nm, respectively. It can be clearly seen that the proposed Machine IV has the best torque value and the proposed Machine III has the second best torque value. Figure 9(b) shows that an excellent agreement is achieved between the 3-D analytical and FEA torque waveforms of proposed optimized Machine IV.
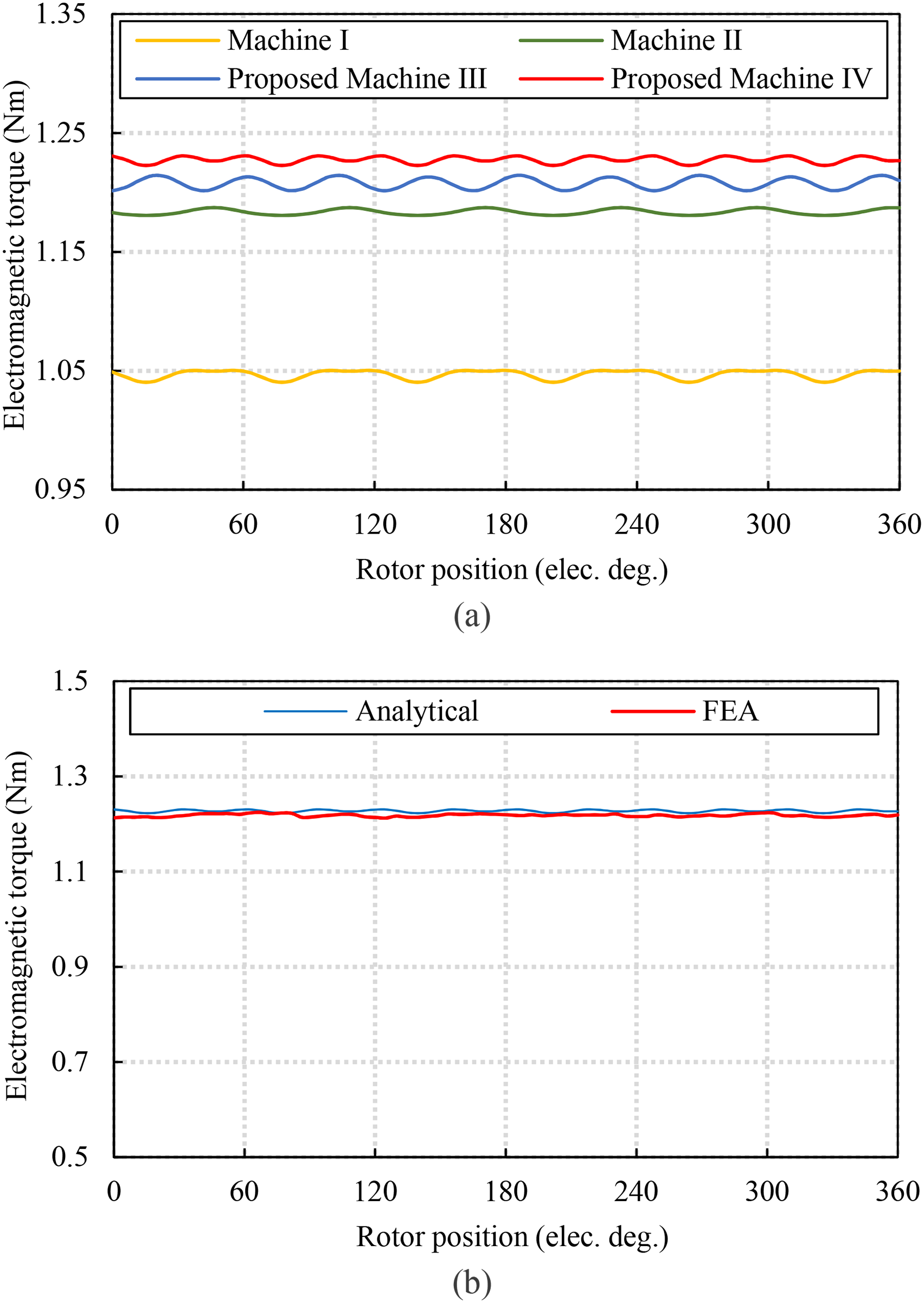
Comparison of electromagnetic torque waveforms. (a) 3-D analytical torque waveform comparison between four AFMs. (b) Comparison of 3-D analytical and FEA torque waveforms of proposed optimized Machine IV with radially layered unequal-height Halbach magnets.
Conclusion
The 3-D linear analytical models have been compared for AFMs with surface-mounted non-layered/layered and segmented Halbach magnets. Using the 3-D analytical subdomain method, using the superposition method, the 3-D magnetic field in the AFM with the layered Halbach arrays has been solved and analyzed. In addition, the four magnet parameters are chosen as the optimization variables, the electromagnetic torque has been optimized. The analytical correctness of the proposed 3-D model with proposed optimized Machine IV is verified with the results of FEA. It is well demonstrated that with the same magnet cost, the optimized AFM with the radially layered unequal-height Halbach magnets exhibits the best electromagnetic performance and that with the axially layered unequal-height Halbach magnets exhibits the second best one. The 3-D analytical performances of the layered AFMs are obviously better than those of the non-layered ones.
Footnotes
Acknowledgements
This work was supported by the Anhui Provincial Natural Science Foundation under Grant 2008085ME179 and the 111 Project under Grant BP0719039.
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of Conflicting Interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.