
Abstract
In order to improve the multi-objective optimization (MOO) efficiency of Long-Stator Linear Synchronous Motor (LSLSM), an efficient optimization design method based on the adaptive Kriging (AKriging) surrogate model and the improved Non-dominated Sorting Genetic Algorithm II (INSGA-II) is put forward. The optimization objectives are average thrust, thrust ripple, and suspension force ripple, with key electromagnetic structural parameters selected as design variables. Optimal Latin hypercube design and Spearman correlation analysis are used to identify the main design variables affecting performance. Then, a high-accuracy AKriging surrogate model for thrust and suspension performance is built, and optimization is carried out using the INSGA-II algorithm. The optimal solution is selected from the generated three-dimensional Pareto front and re-evaluated through finite element analysis (FEA). The simulation results show that the optimized motor's average thrust increases by 13.44%, and the thrust ripple and suspension force ripple decrease by 26.62% and 16.32%, respectively. While maintaining suspension stability, the average thrust is significantly increased, and thrust ripple is effectively suppressed, validating the effectiveness of the optimization method.
Keywords
Introduction
High-speed maglev transportation has attracted considerable attention as a promising mode of modern transit because of its fast operating speed, high efficiency, and low noise.1–3 The Long-Stator Linear Synchronous Motor (LSLSM) is the core driving and levitation component of maglev trains, playing a decisive role in the system operation. Therefore, optimizing its design and performance is the key to achieving a technological breakthrough in the high-speed magnetic levitation system.
For high-speed maglev applications, sufficient average thrust and low thrust and suspension-force ripples are desirable for propulsion capability, ride comfort, and levitation stability, which are widely recognized as key operational requirements of maglev systems.4,5 Previous studies have shown that the propulsion and suspension characteristics of LSLSM-based maglev systems are strongly coupled, and that thrust ripple and suspension-force fluctuation should be carefully considered in motor design.6,7 However, these performance metrics are usually difficult to improve simultaneously, which makes multi-objective optimization (MOO) necessary to seek a reasonable balance and enhance overall performance.
For the multi-objective electromagnetic optimization design of LSLSM, selecting appropriate modeling methods and optimization strategies is crucial for improving optimization efficiency. Among them, optimization methods based on analytical models can effectively avoid the time-consuming issues associated with FEA. In Ref., 8 the LSLSM was optimized by combining an analytical model with a genetic algorithm, resulting in improved thrust and suspension performance of the motor. However, the establishment of analytical models relies on numerous simplified assumptions, and deriving analytical expressions involves complex calculations, resulting in limited general applicability; thus, such models are more suitable for the initial stage of motor design.
Compared with analytical models, surrogate models have lower computational cost, higher robustness and better generality, and can achieve high-accuracy prediction through interpolation and fitting methods. 9 In Ref., 10 a hybrid surrogate model was used to predict the optimization objectives. By integrating the NSGA-II algorithm with the Taguchi method, a MOO of the motor was carried out. FEA results demonstrated that this approach effectively increased the average torque while reducing torque ripple and losses. In Ref., 11 an accurate and efficient modeling method based on a response surface model (RSM) for bearingless permanent magnet synchronous generator was proposed. The motor optimization was achieved by using an improved multi-objective particle swarm optimization algorithm. In Ref., 12 the extreme learning machine was combined with the grey wolf optimization algorithm to enhance the performance of the motor. In Ref., 13 a gradient-boosting-decision-tree-based surrogate model and NSGA-II were combined to optimize a double-sided PM-excited flux-switching machine, achieving higher average torque and lower torque ripple. Among various surrogate models, the Kriging model is widely used in engineering optimization due to its generally high prediction accuracy. Compared with response surface and machine learning-based methods, 14 Kriging is less affected by random errors and offers higher fitting accuracy. In addition, Kriging-based or Kriging-assisted optimization frameworks have been successfully applied to electrical machine design and MOO, showing good applicability in problems with limited samples and nonlinear responses. In Ref., 15 a subdivided Kriging-based MOO method was employed for the optimal design of an interior permanent magnet synchronous motor (PMSM). In Ref., 16 a Kriging-assisted MOO framework was proposed and shown to be effective for nonlinear optimization problems with limited samples. In Ref., 17 a method integrating fuzzy inference and the Kriging model was employed to optimize the key performance indicators of the switched reluctance motor.
Despite the effectiveness of surrogate-assisted MOO methods in electrical machine design, several issues remain when applied to LSLSM for maglev systems. Existing studies mainly focus on general electromagnetic performance, while the specific requirements of maglev systems and the relationship between optimization objectives and system-level performance are not always clearly addressed. Meanwhile, direct MOO based entirely on transient FEA remains computationally expensive. To address the above issues, a surrogate-model-based MOO method is proposed for LSLSM in maglev systems. The method integrates an AKriging model and an INSGA-II algorithm to enhance prediction reliability and optimization performance. First, the finite element model (FEM) of the motor is established, followed by the determination of the design variables and optimization objectives. Then, key variables are identified through experimental design and sensitivity analysis, and an AKriging model is constructed to describe the nonlinear mapping between input variables and performance. Finally, MOO is performed on the surrogate model using INSGA-II, and the effectiveness of the proposed method is verified by comparing the finite-element results of the initial and optimized designs.
Motor structure and operating principle
Motor structure and main parameters
This paper conducts MOO design for LSLSM and establishes a two-dimensional transient FEM as shown in Figure 1. To reduce the modeling complexity and improve the computational efficiency, this paper adopts the electromagnetic module for modeling. The stator adopts a segmented structure, divided into 9 sections, with a spacing of 5 mm between adjacent sections. The rotor is a symmetrical magnetic pole structure, consisting of 10 complete magnetic poles and 2 end magnetic poles. The upper surface of each complete magnetic pole has uniformly cut slots for placing the windings, forming the basic electromagnetic structure of the rotor. This paper mainly studies the electromagnetic performance of LSLSM under traction conditions and analyzes it from an electromagnetic-field perspective.

FEM of the LSLSM.
The linear synchronous motor mainly consists of key components such as the stator core, stator windings, mover core, mover windings, and generator windings. These parts work cooperatively to achieve contactless propulsion and energy recovery for the train. Table 1 presents the design parameters of the LSLSM.
Main parameters of LSLSM.

Operating principle
The LSLSM is the core of propulsion and suspension in high-speed maglev trains, and its operating principle forms the theoretical foundation for the train's linear propulsion and suspension. The motor system consists of a long stator laid along the track and an electromagnet mounted beneath the train. When three-phase symmetrical current is supplied to the stator windings, a travelling wave magnetic field is generated in the stator; simultaneously, the excitation coil forms a constant main magnetic field when supplied with direct current. When the excitation poles operate synchronously with the long stator, the linear motor outputs stable traction force. Its synchronous operating speed is
Where f is the three-phase alternating current frequency, in Hz;
Vertically, when direct current flows through the excitation winding, it interacts with the long stator to generate longitudinal electromagnetic attraction, lifting the vehicle body upward. Once a certain suspension distance is reached, the electromagnetic force balances the vehicle's weight.
Electromagnetic characteristics
A two-dimensional transient FEM is established in the Maxwell transient module to analyze the electromagnetic characteristics of the LSLSM. During meshing, finer meshes are applied in the air gap and other key regions with strong field variations to improve the calculation accuracy. The mesh and solver settings are selected to ensure stable electromagnetic results under the studied operating conditions. The magnetic flux distribution is calculated, as shown in Figure 2. The flux lines form closed magnetic circuits through the rotor teeth, air gap, stator teeth, stator yoke, and rotor yoke. A portion of the leakage flux exists in the mover slots, entering the mover core from the sides of the mover poles and forming a closed path through the mover teeth and yoke, while the other portion exists in the air gap. The magnetic flux lines exhibit a generally reasonable distribution.

Magnetic flux line distribution of the LSLSM.
The motor thrust and suspension force were calculated through electromagnetic finite element simulation. In the post-processing module, one period was selected to obtain the corresponding output thrust and suspension force waveforms, as shown in Figure 3 and Figure 4. Figure 3 shows that the motor has an average thrust of 5.3268 kN and a thrust ripple of 20.1%. Simultaneously, Figure 4 shows a suspension force ripple of 8.09%. The results show that there are significant fluctuations in the thrust and suspension force of the motor, which may have an impact on the operational stability and ride comfort of the maglev system. Therefore, it is necessary to further optimize the key parameters to enhance the output performance of the motor.
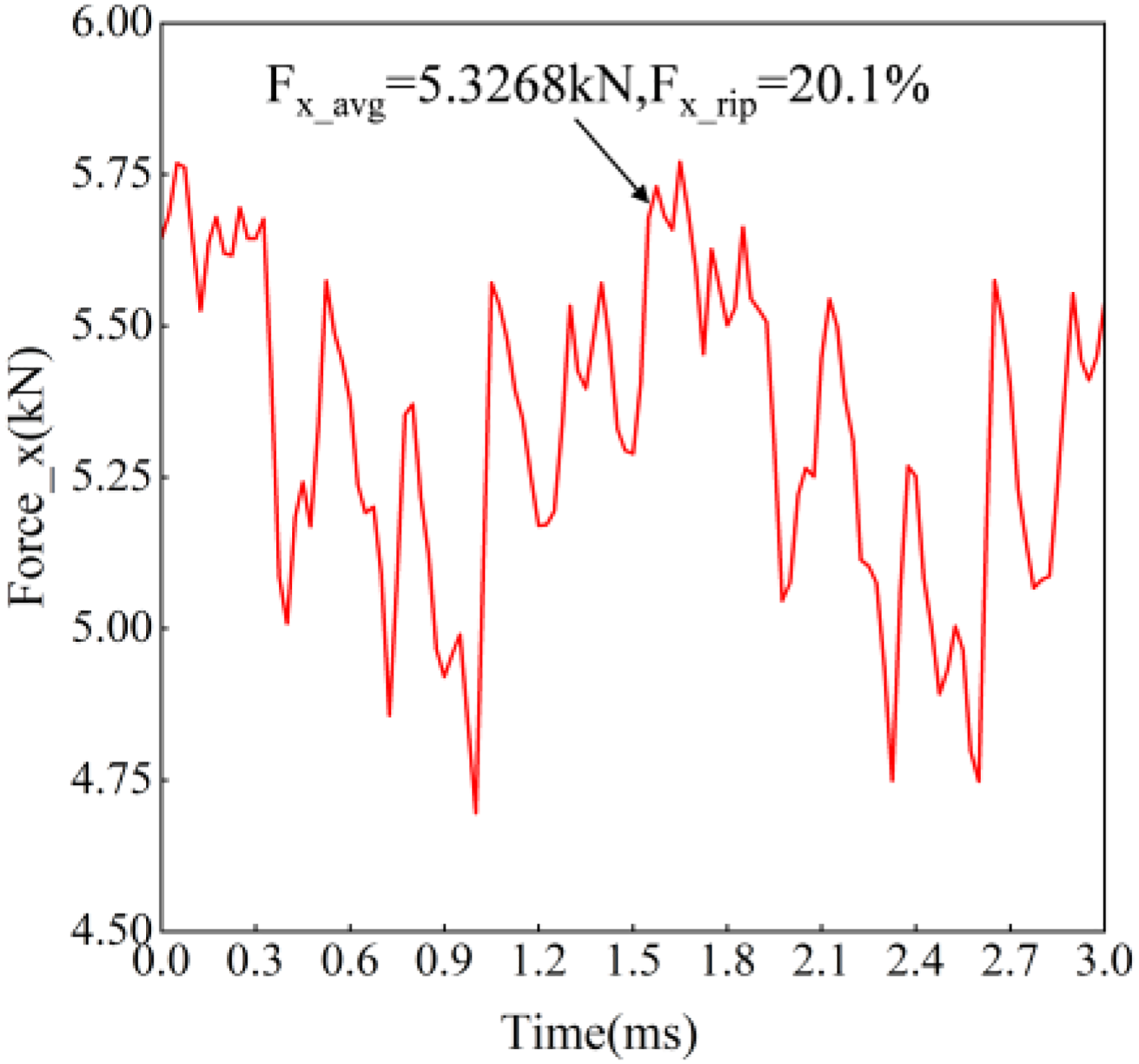
Initial thrust waveform of LSLSM.
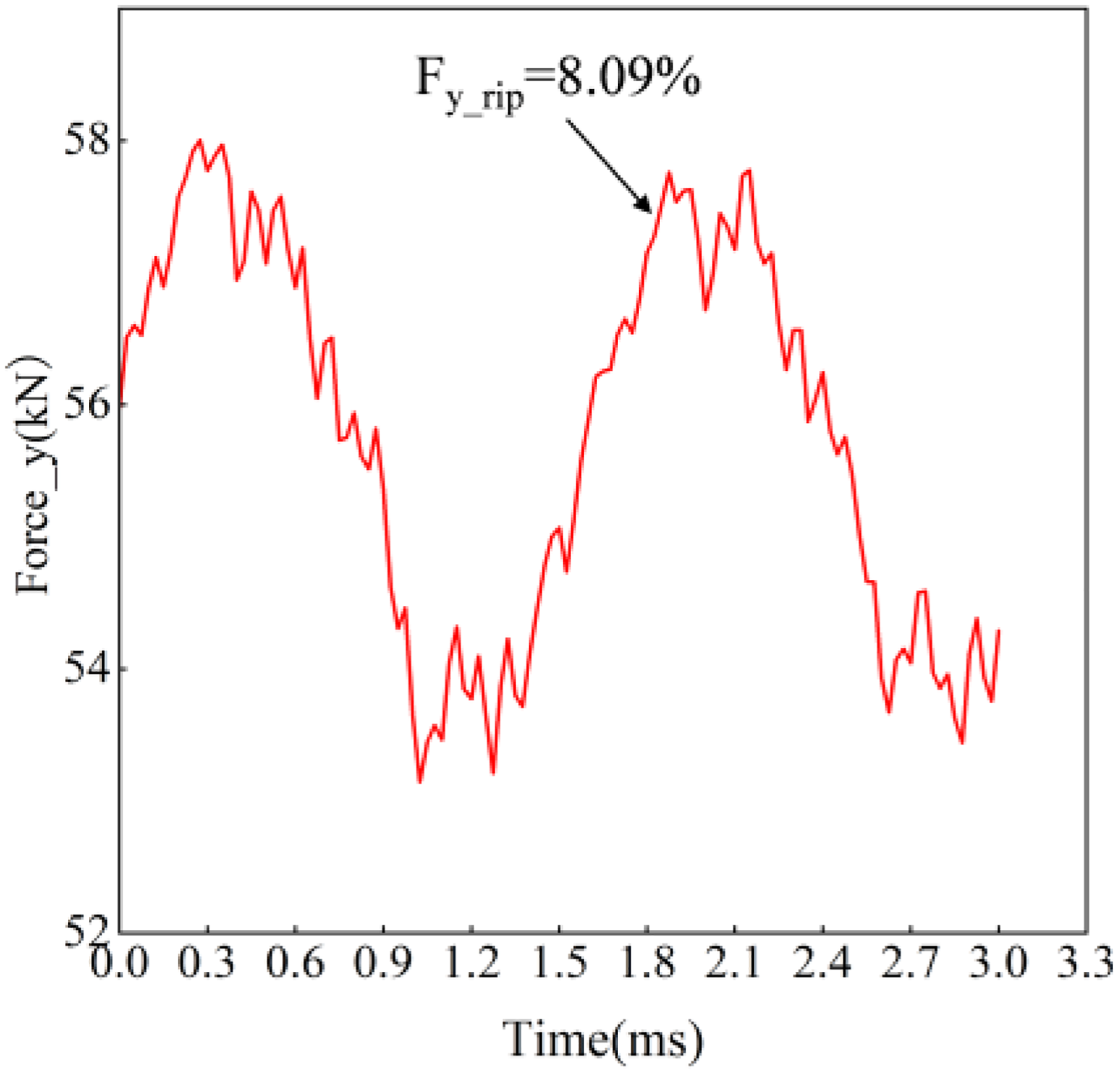
Initial suspension force waveform of LSLSM.
Multi-objective optimization design based on the surrogate model
Figure 5 illustrates the process of MOO design for the motor.
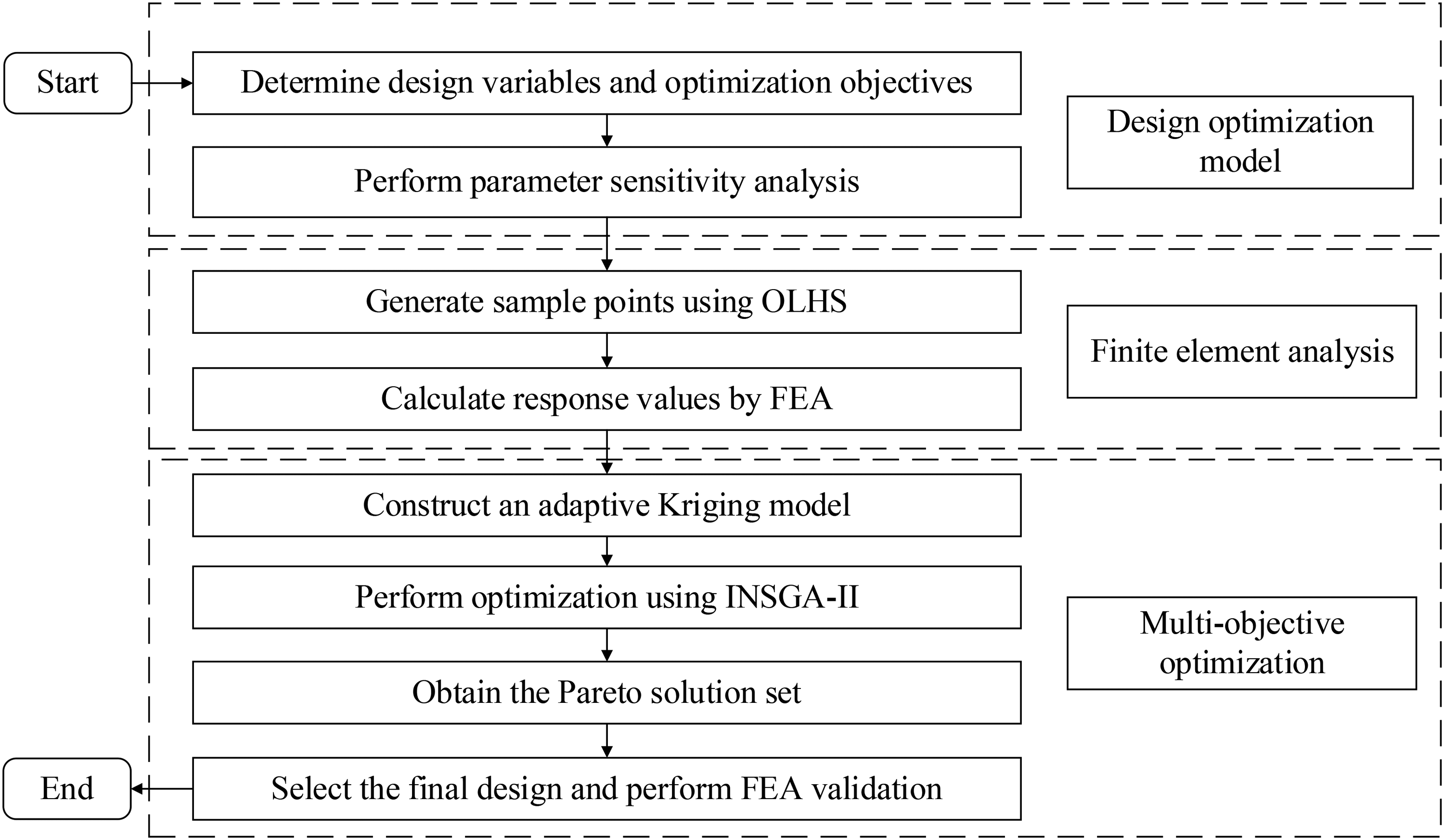
Multi-objective optimization flowchart.
Determination of optimization objectives and design variables
In maglev systems, the average thrust determines the propulsion capability of the train, while thrust ripple is closely related to vibration and ride comfort. In addition, suspension force ripple directly affects levitation stability. Therefore, the average thrust Fx_avg, thrust ripple Fx_rip, and suspension force ripple Fy_rip are taken as the optimization objectives, which are defined as follows:
Since the MOO in this study is formulated in a minimization form, the reciprocal of the average thrust is adopted. In this way, maximizing Fx_avg can be equivalently transformed into minimizing 1/Fx_avg.
And satisfying the conditions: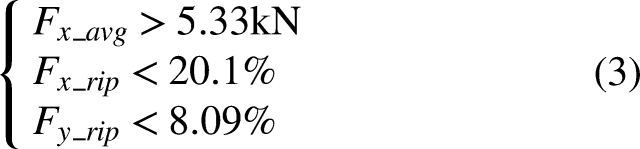
Here, the value of 20.1% corresponds to the thrust ripple of the initial design and is used as a reference level in the optimization process.
Therefore, optimizing these electromagnetic metrics directly improves the propulsion performance, ride comfort, and levitation stability of maglev trains.
The average thrust is defined as
The thrust ripple is defined as
The suspension force ripple is defined as
In motor optimization design, although all dimensional parameters can theoretically serve as optimization variables, key parameters are usually selected to balance computational efficiency and engineering feasibility. The selection of variables should comprehensively consider multiple factors, including motor structure, optimization objectives, and computational resources. The choice of key parameters should follow these principles:
Have a significant influence on the optimization objectives and constraint performance; Be mutually independent, while allowing other parameters to be determined accordingly; The number of variables should not be excessive in order to enhance the efficiency of optimization.
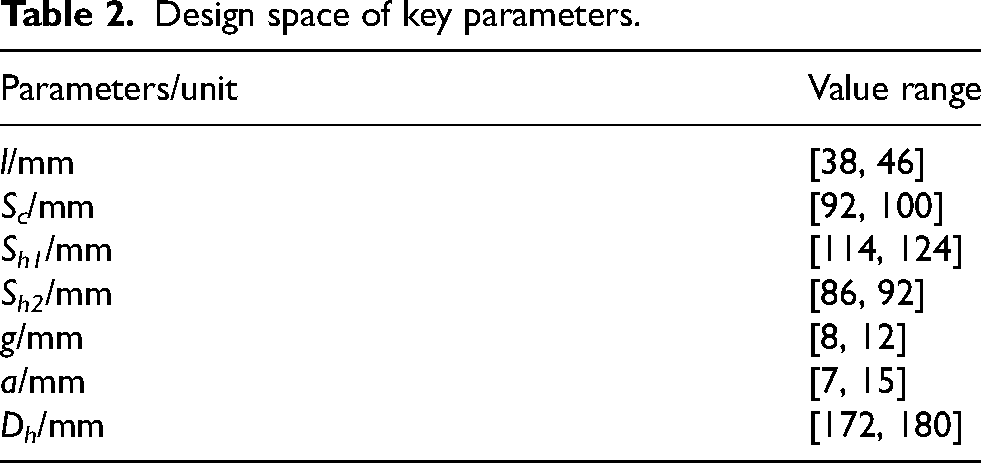
In conclusion, the preliminarily selected main parameters include the stator slot width l, the mover slot width Sc, mover slot heights Sh1 and Sh2, air-gap length g, generator slot length a, and mover height 1 Dh, as shown in Figure 6. To determine the design space of each parameter, single-variable scanning is carried out for each one. The area in Figure 7 within which each parameter has a significant impact on the target was selected as the design space. The design space for the key parameters is listed in Table 2. Here, the single-variable scans are used only to preliminarily determine reasonable parameter ranges, while the interaction effects among multiple parameters are further reflected through the subsequent OLHS-based sampling and correlation analysis.
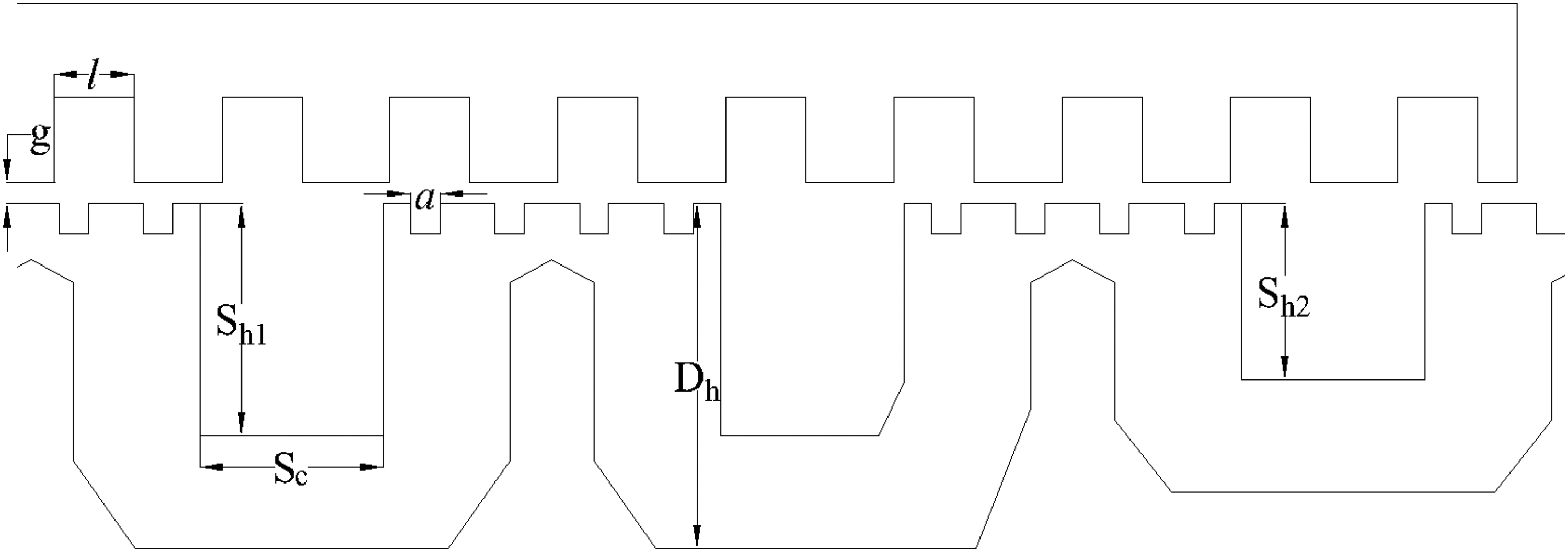
LSLSM motor parameter topology diagram.
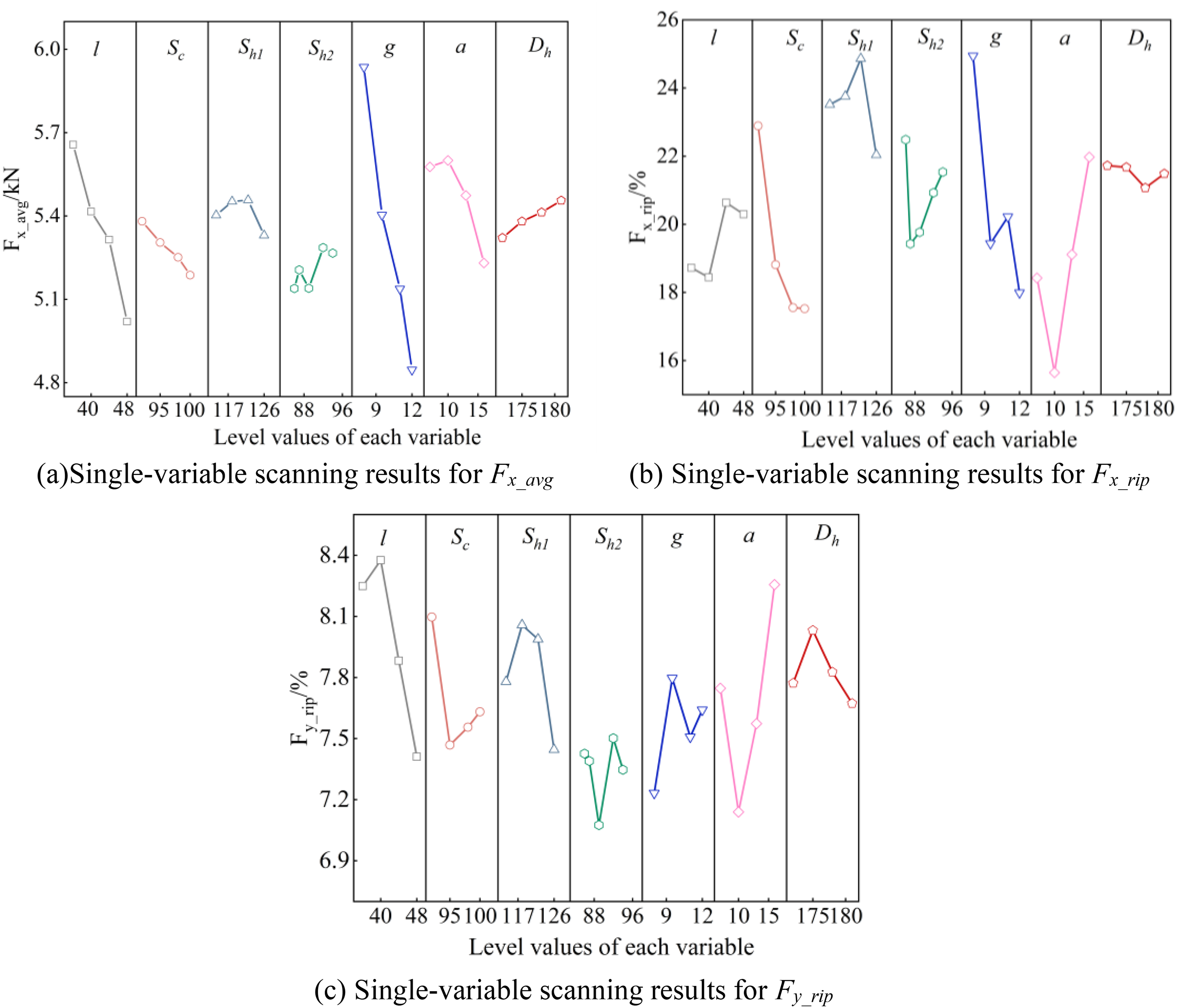
Univariate scanning results of three performance indicators for each design parameter.
Design space of key parameters.
Experimental design and parameter sensitivity analysis
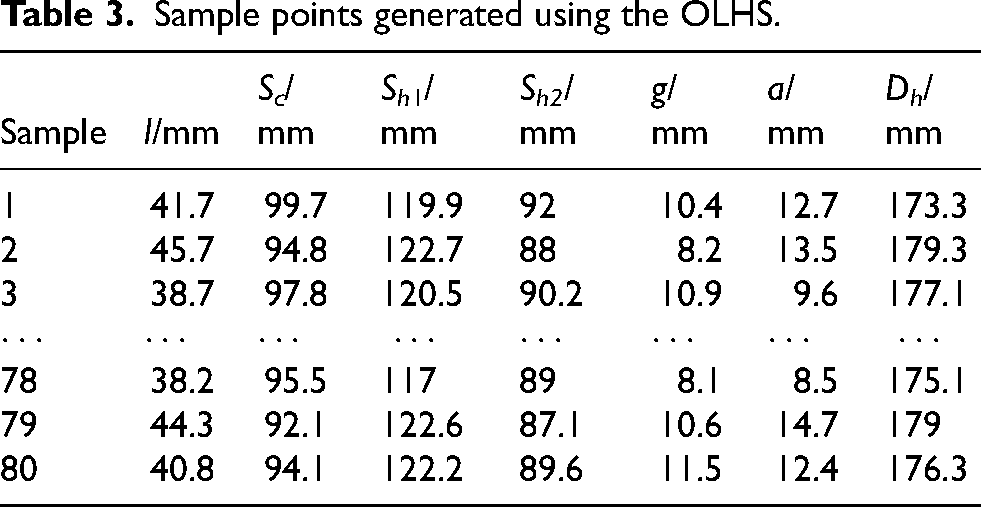
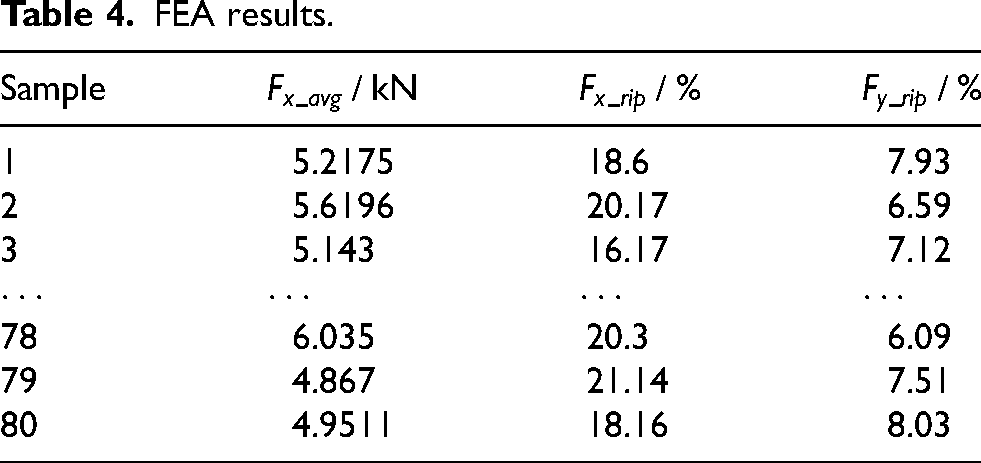
To efficiently obtain high-quality sample data under limited computational resources, this study employs the OLHS method based on the principle of space-filling for experimental design. This method maintains sampling uniformity while significantly reducing the number of samples, thereby ensuring adequate coverage of the design space with low computational cost. Therefore, it achieves a balance between the accuracy of the model and its computational efficiency. The OLHS method was employed to design experiments for the key parameters within their design space, resulting in 80 sets of sample points, as shown in Table 3. These sample points were then analyzed in Maxwell, and the values of Fx_avg, Fx_rip, and Fy_rip shown in Table 4 were obtained.
Sample points generated using the OLHS.
FEA results.
To evaluate the relationship between each parameter and the optimization objective, this study employed Spearman correlation analysis to conduct the correlation calculation. This method determines the strength of the correlation between variables by sorting them, and is applicable to non-normal distribution or nonlinear data. 18 Therefore, it has been widely applied in data analysis and design analysis.
Let X and Y be two independent variables. If the elements of X and Y are sorted in ascending or descending order respectively, the corresponding order sequences x and y can be obtained. The Spearman correlation coefficient between X and Y is: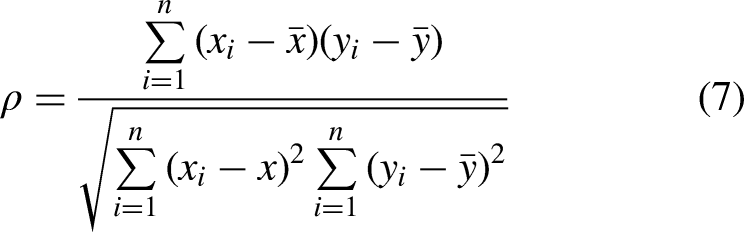
Where n is the number of samples. In practical applications, the computation of Spearman's correlation coefficient is often simplified using the rank difference set d, with the formula being:
Where d is the set of differences between the corresponding elements of x and y, that is, di = xi -yi (1 ≤ i ≤ n).
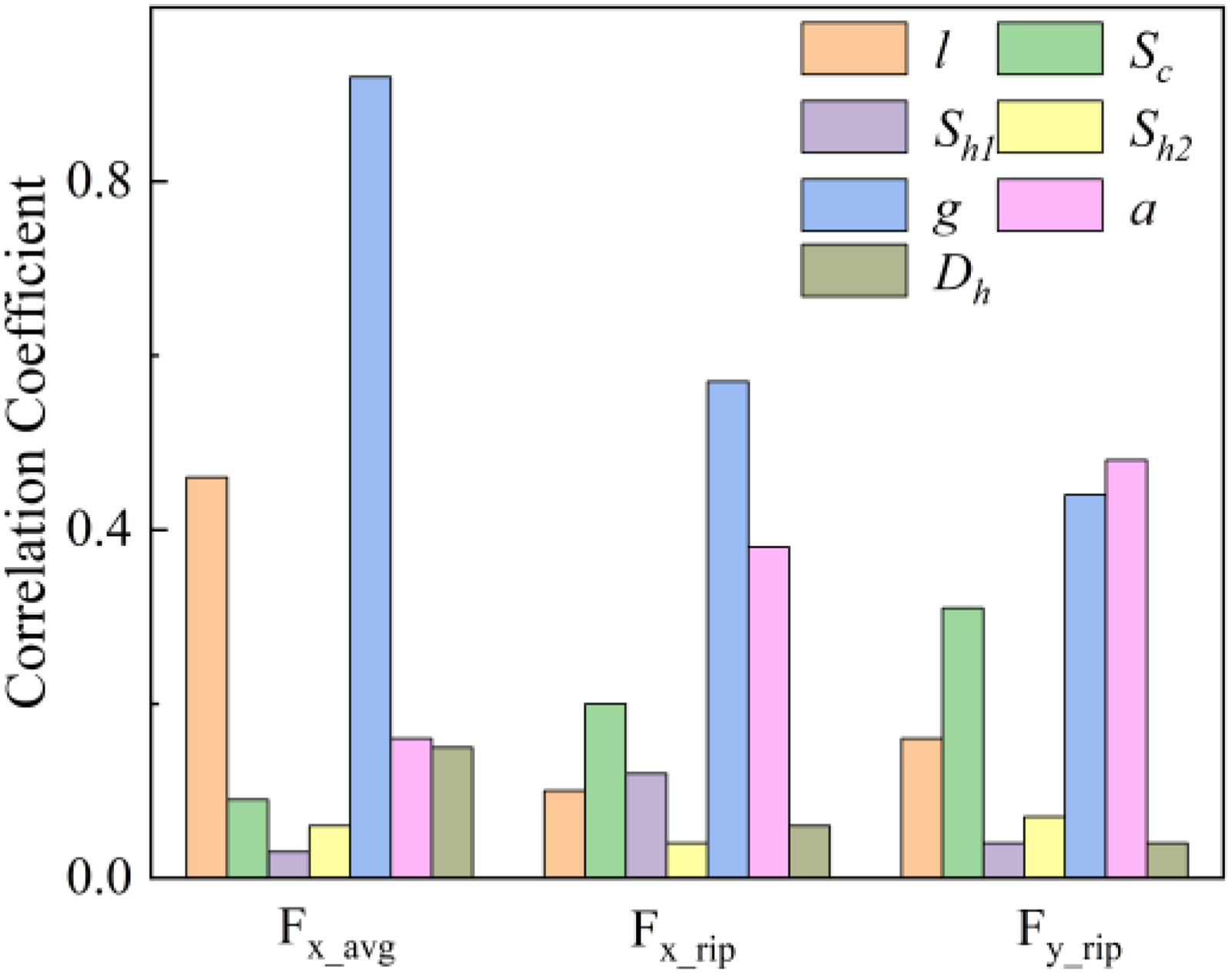
Finally, Figure 8 shows the Spearman correlation coefficients between each optimization parameter and the three optimization objectives.
Spearman correlation coefficients of design variables.
To better compare the relevance of each optimization parameter to the optimization objective, a comprehensive relevance factor is computed for each parameter according to Equation (9). The calculated values are shown in Figure 9.
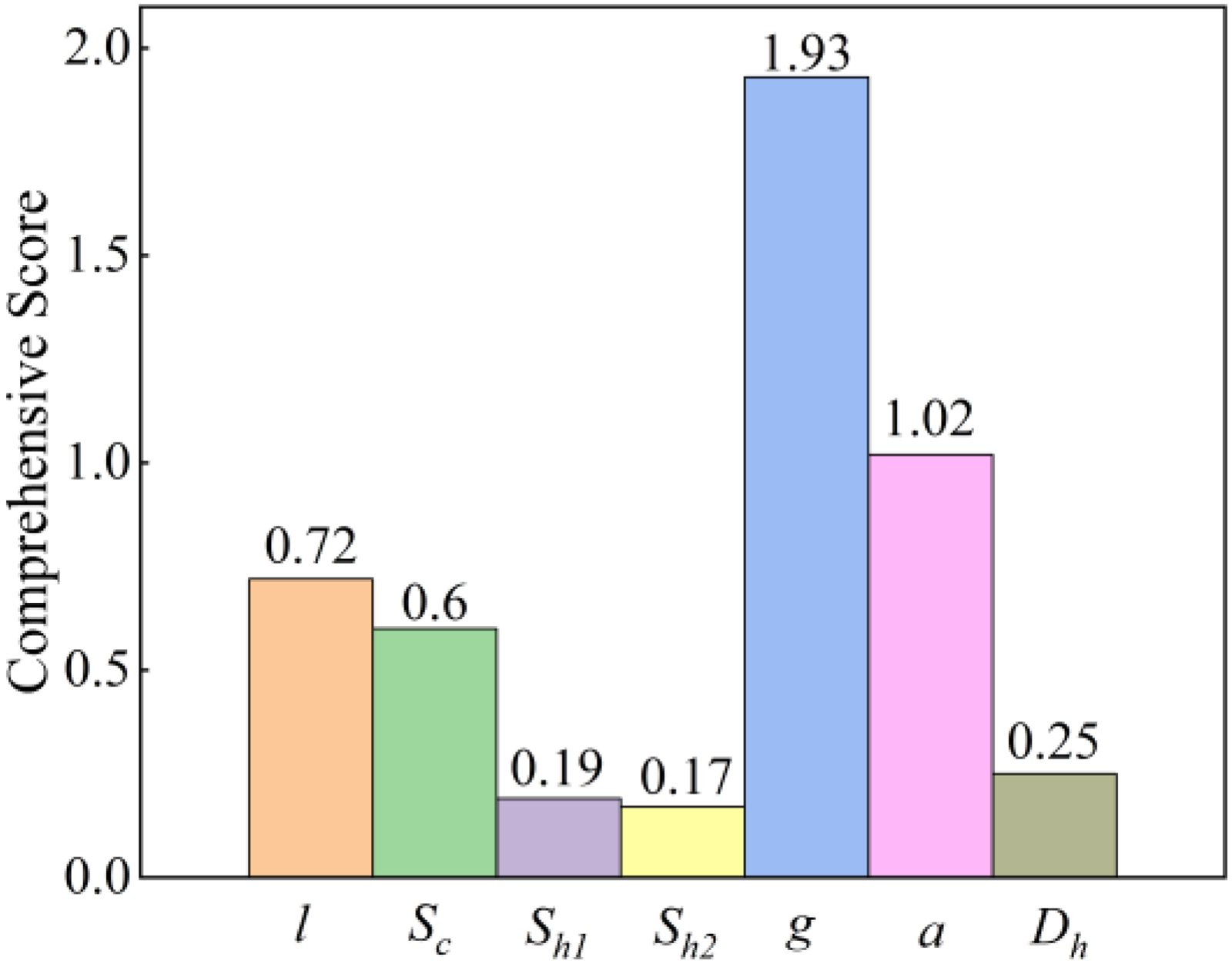
Comprehensive correlation scores of design variables.
Where ρmi is the comprehensive relevance, and ρij is the Spearman correlation coefficient.
As the presence of seven input parameters leads to a decline in the surrogate model's fitting accuracy and consequently affects the optimization precision, four parameters with higher correlations are selected as optimization variables. According to Figure 9, the air gap length g, generator slot length a, stator slot width l, and mover slot width Sc exhibit relatively strong correlations with the optimization objectives. Therefore, the study identifies these parameters as the primary optimization variables.
Construction of the surrogate model
During the optimization procedure, the optimization algorithm requires obtaining average thrust and force ripple data for the motor under numerous different parameter combinations. If the optimization process is entirely dependent on finite element simulation, the computing time will increase significantly, which cannot meet the computing efficiency requirements necessary for the optimization design. Therefore, using surrogate models can effectively solve this problem.
Adaptive Kriging surrogate modeling
The Kriging model is a commonly used surrogate model based on spatial statistics, which can predict the response of unknown points based on existing sample points. It describes the spatial relationship between samples through a correlation function and thereby establishes an approximate model between design variables and response values. During the modeling process, only the form of the correlation function and the corresponding parameters need to be selected, without the need for complex iterative training. Therefore, it has high computational efficiency and is more suitable for optimization problems with high computational costs. However, its accuracy is affected by the sample distribution. If there are sparse regions in the design space, the prediction ability and overall stability within these regions may decline.
To enhance the predictive ability of the basic Kriging model in areas with few samples, an adaptive update mechanism is introduced to continuously refine the model, thereby improving its prediction accuracy. The specific strategies are as follows:
Adaptive update trigger
To quantify the prediction uncertainty of a single sample point, the U-type learning function is adopted, defined as: Hybrid sampling strategy (candidate sample set generation)
A hybrid sampling mode integrating Voronoi + GSI global sampling and comprehensive optimization distance local sampling is adopted. Based on the initial OLHS samples, the design space is first divided into several non-overlapping subspaces using Voronoi diagrams, and each subspace contains only one initial sample point. To quantify the uniformity of sample distribution in each subspace, the global sparsity index (GSI) of sample points is defined as:
Where M = 5 (number of random points on the subspace boundary), 
Where ωj = 1/3, and dik is the normalized distance between the i-th Pareto point and the initial solution in the k-th design variable or objective value. Two Pareto points with the largest comprehensive optimization distance are selected, and one local candidate point is generated in the neighborhood of each selected point. Finally, the two global candidate points and two local candidate points are merged to form a candidate sample set containing four points.
Sample management mechanism
To avoid covariance matrix singularity caused by sample redundancy, a Euclidean distance threshold λ=5 × 10−3 is set. For the selected optimal training point U(∗), we first calculate the minimum Euclidean distance between it and the existing training samples: if the distance is no less than λ, U(∗) is substituted into finite element simulation to obtain the true response value, which is then used to update the training set and Kriging model; if the distance is smaller than λ, the U(∗) is discarded, select the point with the second smallest U-value from the candidate sample set as the new U(∗), and repeat the distance judgment process.
Model comparison and validation
In order to evaluate the predictive performance of the AKriging model, it was compared with the backpropagation (BP) neural network, support vector machine (SVM), basic Kriging model and response surface model (RSM). The determination coefficient (R2), symmetric mean absolute percentage error (SMAPE) and mean absolute percentage error (MAPE) were used as evaluation indicators to quantify the modeling performance of these methods.
The optimization objectives of this paper are average thrust, thrust ripple, and suspension force ripple. Preliminary research indicates that the fitting accuracy of surrogate models constructed directly for optimization objectives is insufficient to meet requirements. Therefore, this paper proposes a “divide-and-conquer” meta-modeling strategy. The fundamental approach avoids directly fitting complex metrics, instead prioritizing the construction of high-precision surrogate models for their base quantities. Although optimizing the target through base-quantity calculations may introduce some errors, as long as the base model's accuracy is sufficiently high, the overall error can be effectively controlled. Therefore, it is capable of enhancing the computational efficiency while maintaining a high level of accuracy. The evaluation metrics for different surrogate models are shown in Table 5.
Evaluation indicators of each surrogate model.
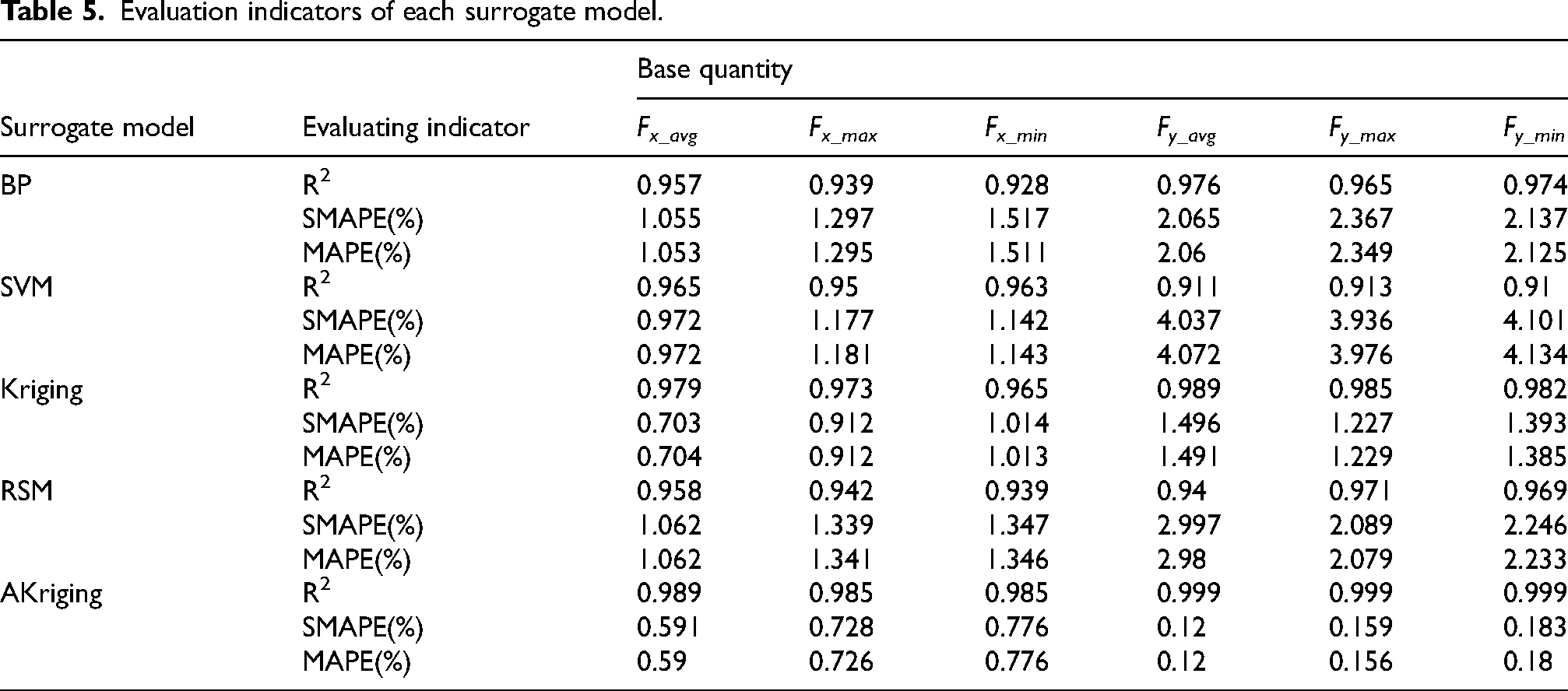
In Table 5, the predictive performance of each surrogate model was compared using R2, MAPE, and SMAPE. Among them, R2 was the primary evaluation metric, and the model with the higher R2 value was preferred. When the R2 values of different models are relatively close, a further comparison is conducted by combining MAPE and SMAPE. The model with the smaller error is selected. Comprehensive studies have shown that the AKriging model has higher fitting accuracy. Therefore, AKriging is determined as the surrogate model.
However, the final optimization objectives were average thrust, thrust ripple, and suspension force ripple. To test the reliability of the “divide and conquer” strategy combined with adaptive update, this paper randomly selected 10 points within the design space for verification. Subsequently, the prediction results of the FEA and the AKriging model were compared, as shown in Table 6.
Error analysis.
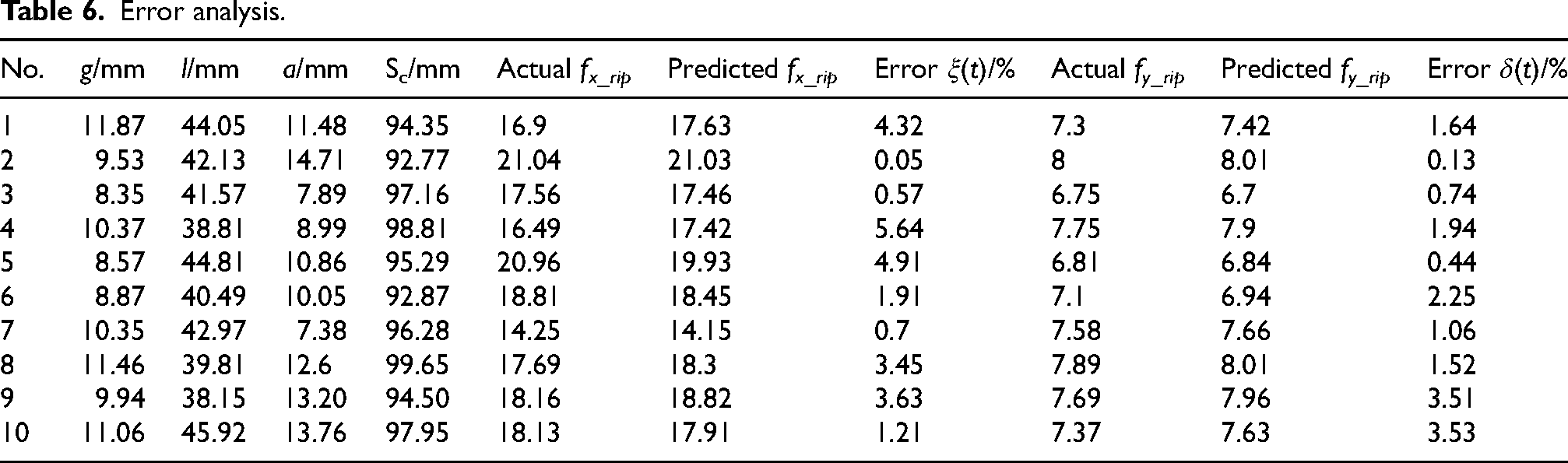
Where Fx_rip is the thrust ripple, Fy_rip is the suspension force ripple. The results show that the prediction errors are within an acceptable range, indicating that the proposed surrogate model has good predictive ability across the design space. This confirms that the established AKriging model can effectively replace the original FEM in the subsequent MOO.
INSGA-II-based multi-objective optimization
NSGA-II provides a set of Pareto non-dominated solutions for the trade-off analysis among multiple objectives through its efficient non-dominated sorting and elite retention mechanisms.
19
To further enhance the algorithm's performance, strategies such as tent-logistic chaotic initialization, dynamic adjustment of crossover and mutation probabilities, and Cauchy mutation were introduced into the NSGA-II framework. For ease of subsequent description, this improved algorithm is referred to as INSGA-II.
Tent-Logistic Chaotic Initialization
The Tent-Logistic chaotic map is adopted to enhance the uniformity of the initial population's distribution in the design space. Its expression is as follows: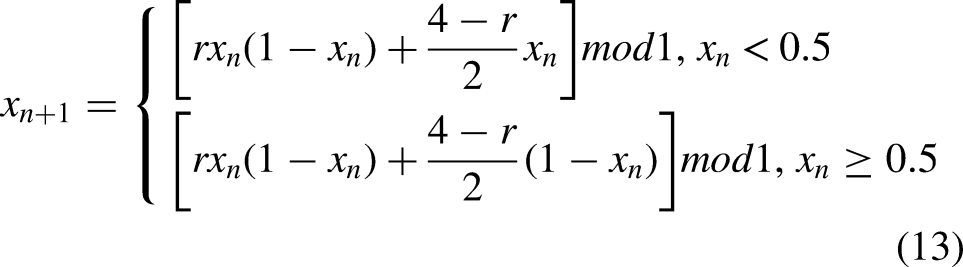
Where xn is the variable in the chaotic sequence, r is the control parameter, xn∈[0,1], r∈(0,4).
Dynamic cross-mutation probability
During the optimization process, the crossover probability and mutation probability will be automatically adjusted throughout the entire iteration process. This enables the algorithm to adopt different search strategies at different stages. In the early iterations, both values are set at higher levels to expand the search range and enhance the global search capability; in the later iterations, they gradually decrease, concentrating the search around the better solutions and thereby strengthening the local search capability. Based on this, the cosine function is introduced to dynamically adjust the crossover probability and mutation probability.

Where t is the current iteration number, Tmax is the maximum number of iterations, pc0 and pm0 are the initial crossover probability and mutation probability, respectively.
Cauchy mutation operation
To address the issue that the traditional NSGA-II is prone to getting trapped in local optima during the optimization process, the Cauchy mutation strategy is adopted. In each generation of non-dominated solutions, an appropriate perturbation is applied to the current optimal individual to enhance the algorithm's ability to escape from local optima. Its updated formula is:
Where xbest is an elite individual selected from the current first non-dominated front, σ is the disturbance scale coefficient, Cauchy(0,1) is a standard Cauchy distribution random variable. After mutation, boundary repair is performed to keep the offspring within the feasible search space.
To further verify the effectiveness of the INSGA-II algorithm, benchmark tests were carried out on ZDT1 and DTLZ1. In addition, to ensure the reliability of the results, both the traditional NSGA-II and the improved NSGA-II were independently run 50 times on each test function. The improved algorithm was compared with the traditional NSGA-II using the inverted generational distance (IGD) and spacing metric (SP). As shown in Figure 10 and Figure 11, the improved NSGA-II achieves lower IGD and SP values on both test functions. Therefore, the improved NSGA-II exhibits better convergence and diversity than the traditional NSGA-II.
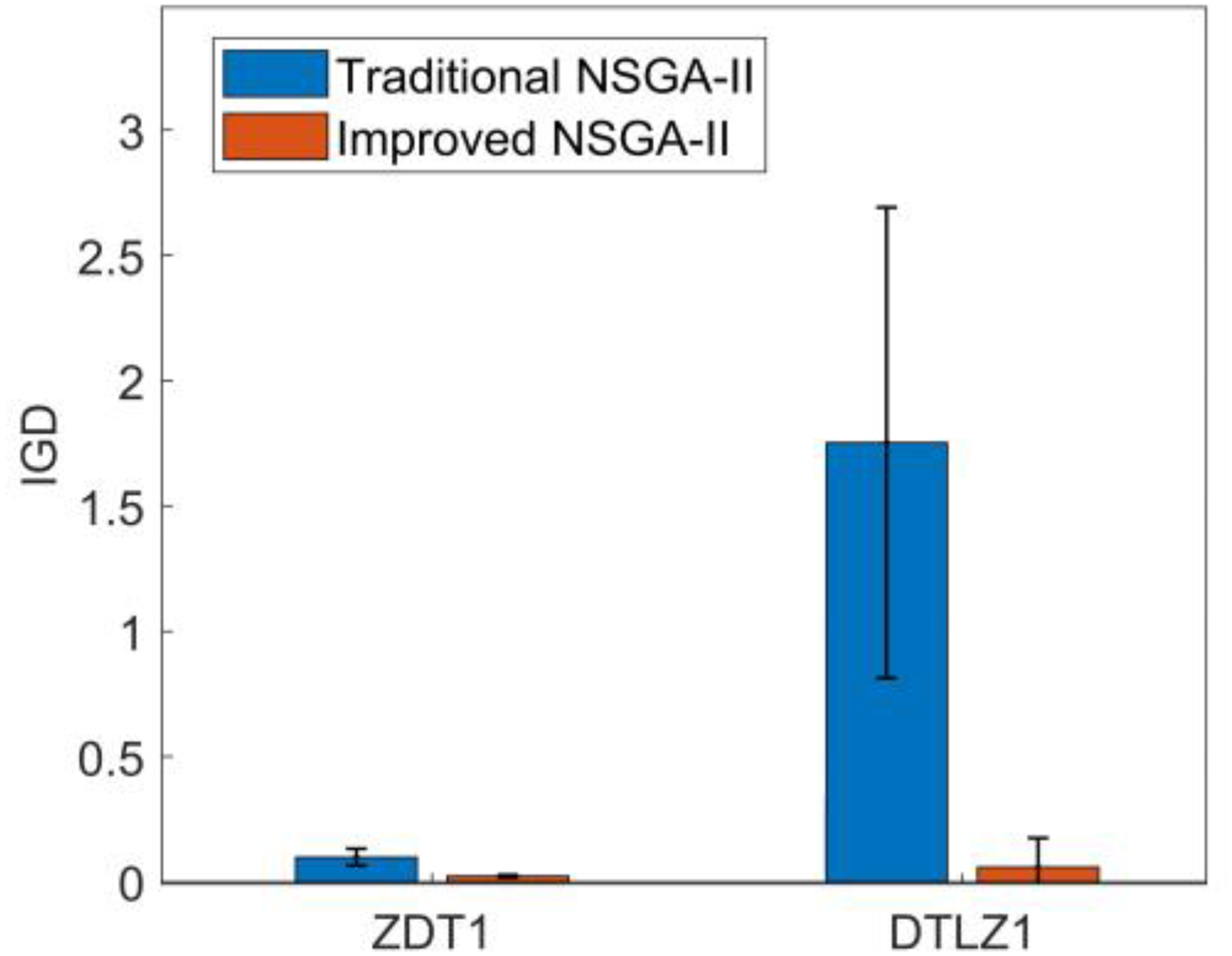
Comparison of IGD indicators.
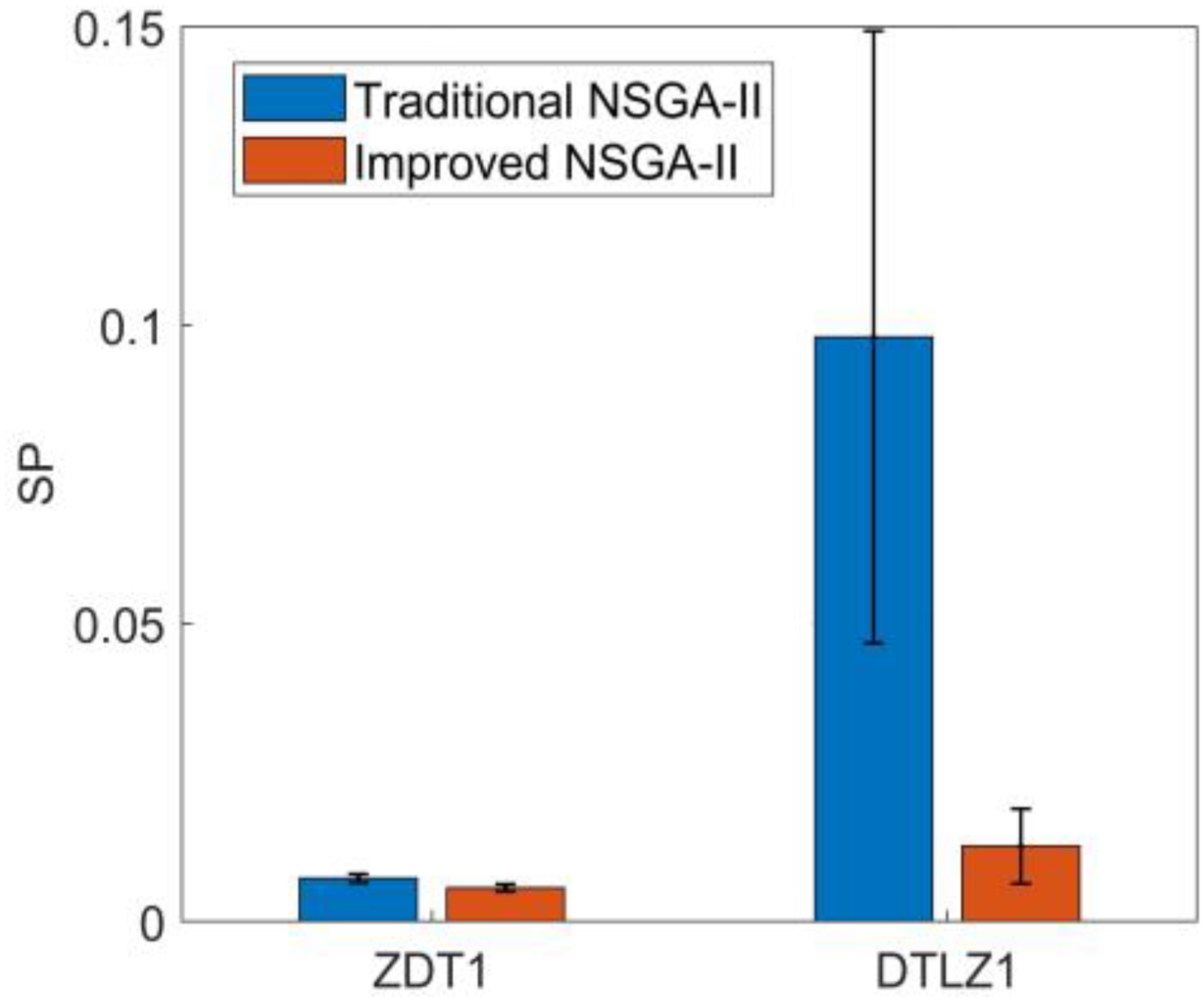
Comparison of SP indicators.
The population size is set at 110 and the number of iterations is 150. The input design variables include g, a, l, and Sc. Based on the previously established AKriging surrogate model, MOO was performed for the three objectives, namely average thrust, thrust ripple, and suspension force ripple, resulting in a three-dimensional Pareto front, as shown in Figure 12.
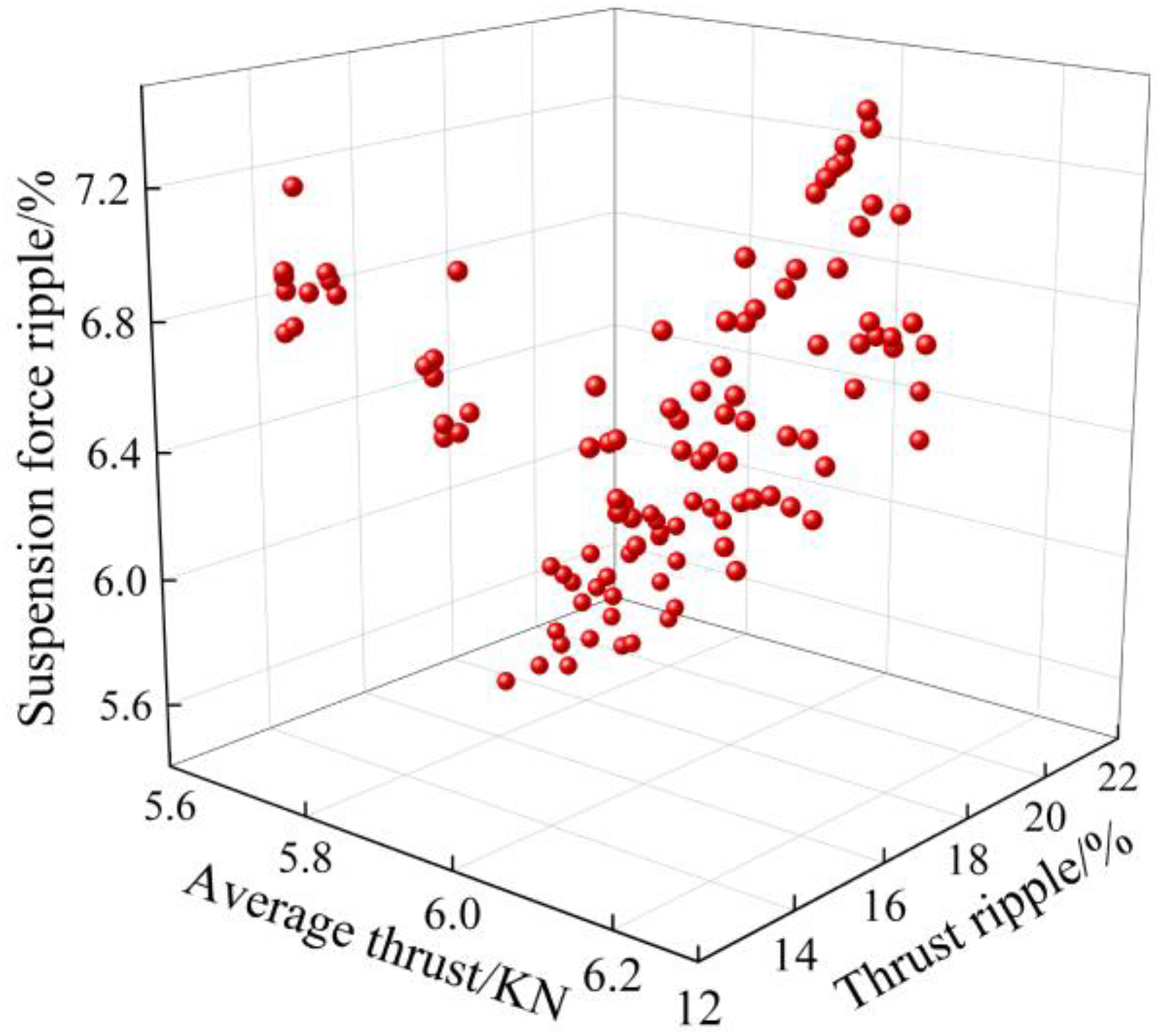
Three-dimensional Pareto front of the multi-objective optimization.
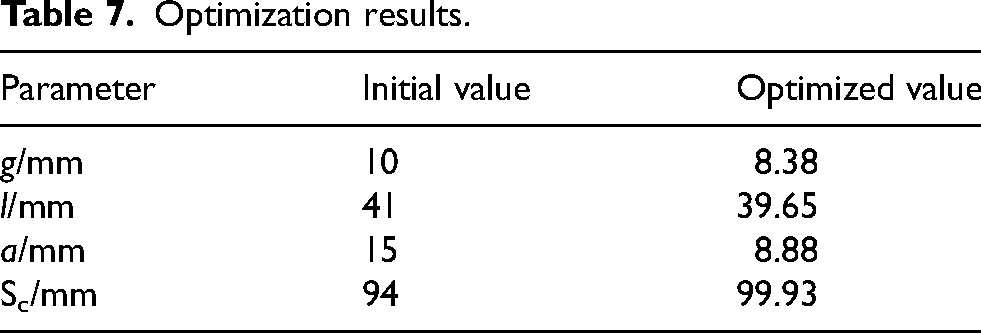
Based on the Pareto optimal solution set shown in Figure 12, the final optimized design scheme was determined through a comprehensive evaluation of key performance indicators. The motor structural parameters of this scheme are shown in Table 7.
Optimization results.
The optimized variables were substituted into the FE model for simulation, and the obtained results were then compared with the forecasts of the AKriging surrogate model. The errors of each optimization objective are shown in Table 8.
Errors.
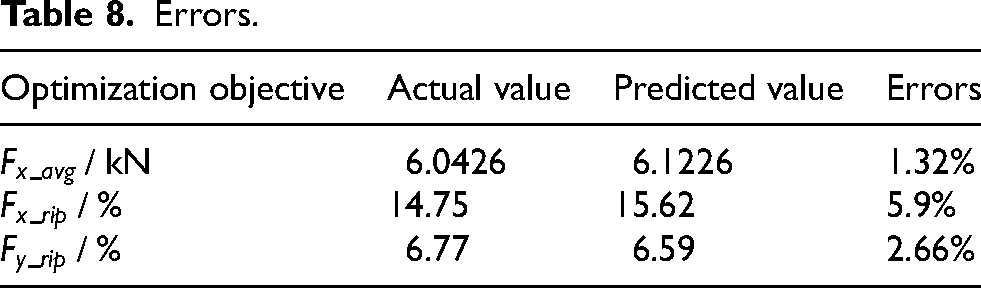
As shown in Table 8, the error values for average thrust, thrust ripple, and suspension force ripple are all below 6%. This further indicates that the established AKriging model still possesses good prediction accuracy within the optimized relevant area, thereby verifying the reliability of the proposed scheme.
Comparative and validation analysis of electromagnetic performance
To verify the effectiveness of the proposed method, the electromagnetic performance of the initial and the optimized motors was compared using FEA. During the simulations, the same excitation conditions, meshing settings, and simulation time were applied to the LSLSMs before and after optimization.
Taking the single-side phase A winding as an example, Figure 13(a) shows the no-load back EMF waveforms before and after optimization. After optimization, the amplitude increased. Figure 13(b) shows that the fundamental component of the optimized design is higher than that of the original design and the THD decreases from 7.03% to 4.82%. This indicates that the optimization effectively improves the waveform quality of the no-load back EMF.
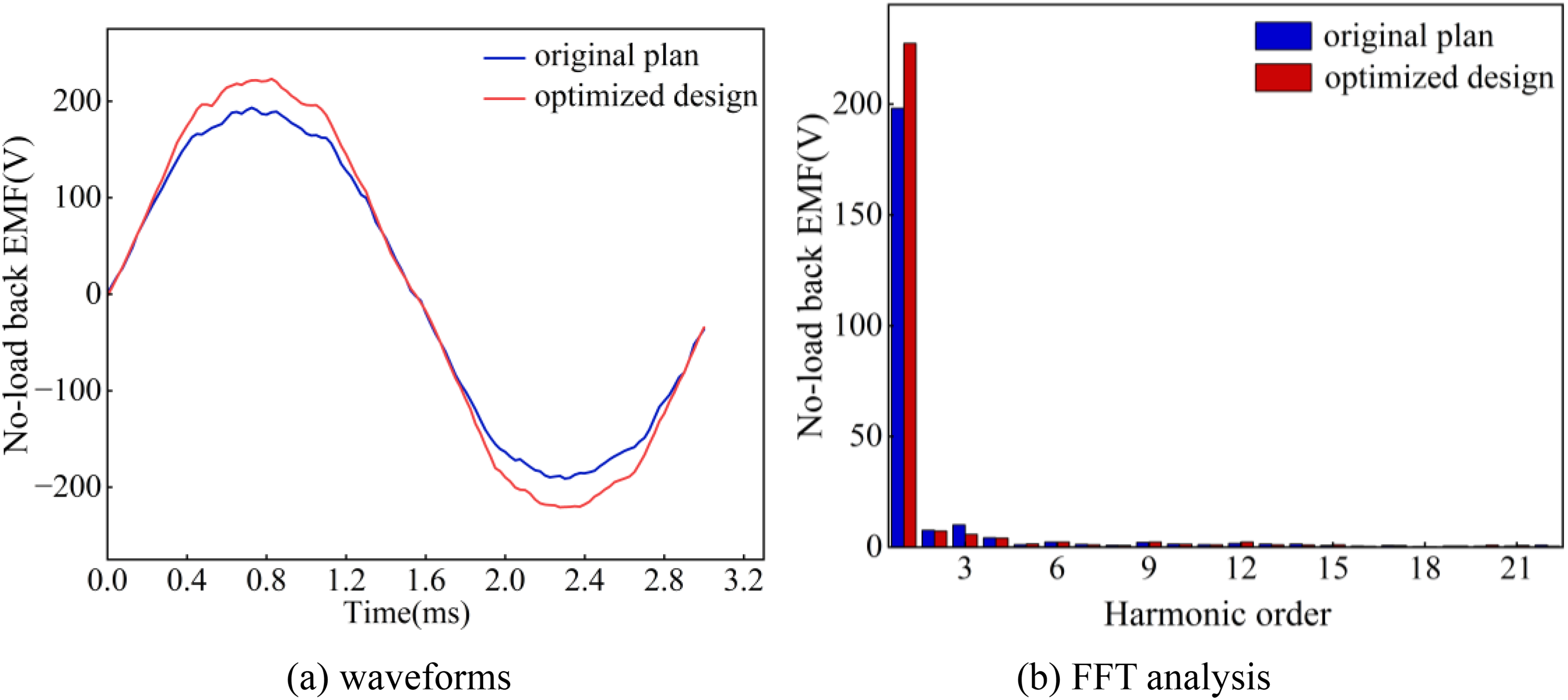
Comparison of back EMF before and after optimization.
Figure 14 presents the comparison of thrust performance before and after optimization, showing a significant improvement after optimization. The initial motor's average thrust was 5.3268 kN with a thrust ripple of 20.1%. After optimization, the motor's average thrust reached 6.0426 kN with a thrust ripple of 14.75%. The optimized motor showed a 13.44% increase in average thrust and a 26.62% decrease in thrust ripple. Figure 15 shows the comparison of suspension force performance before and after optimization. The suspension-force ripple of the initial motor was 8.09%, which decreased to 6.77% after optimization, representing a reduction of 16.32%. The above analysis demonstrates that the optimized motor effectively suppresses thrust ripple and suspension force ripple while enhancing the average thrust.
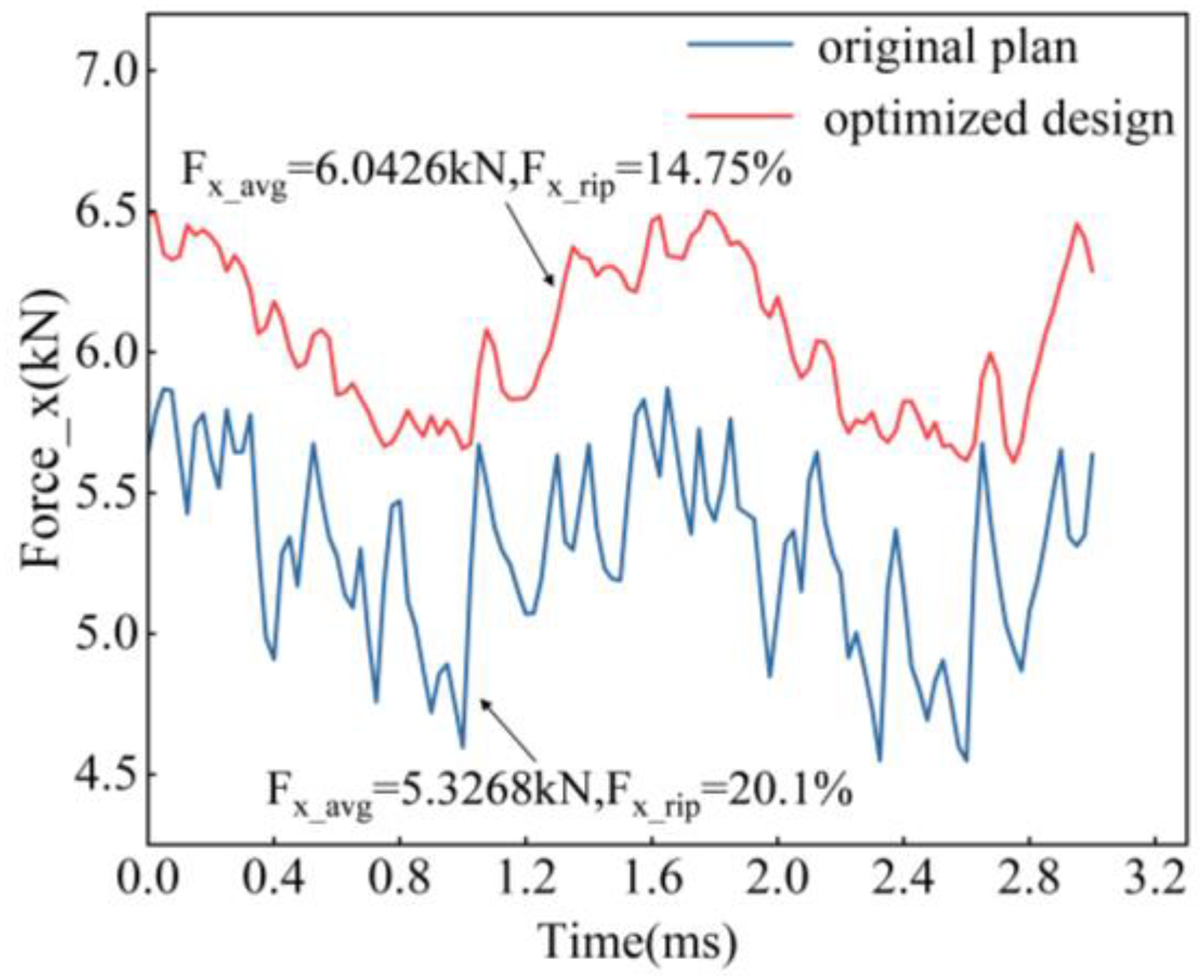
Thrust performance before and after optimization.
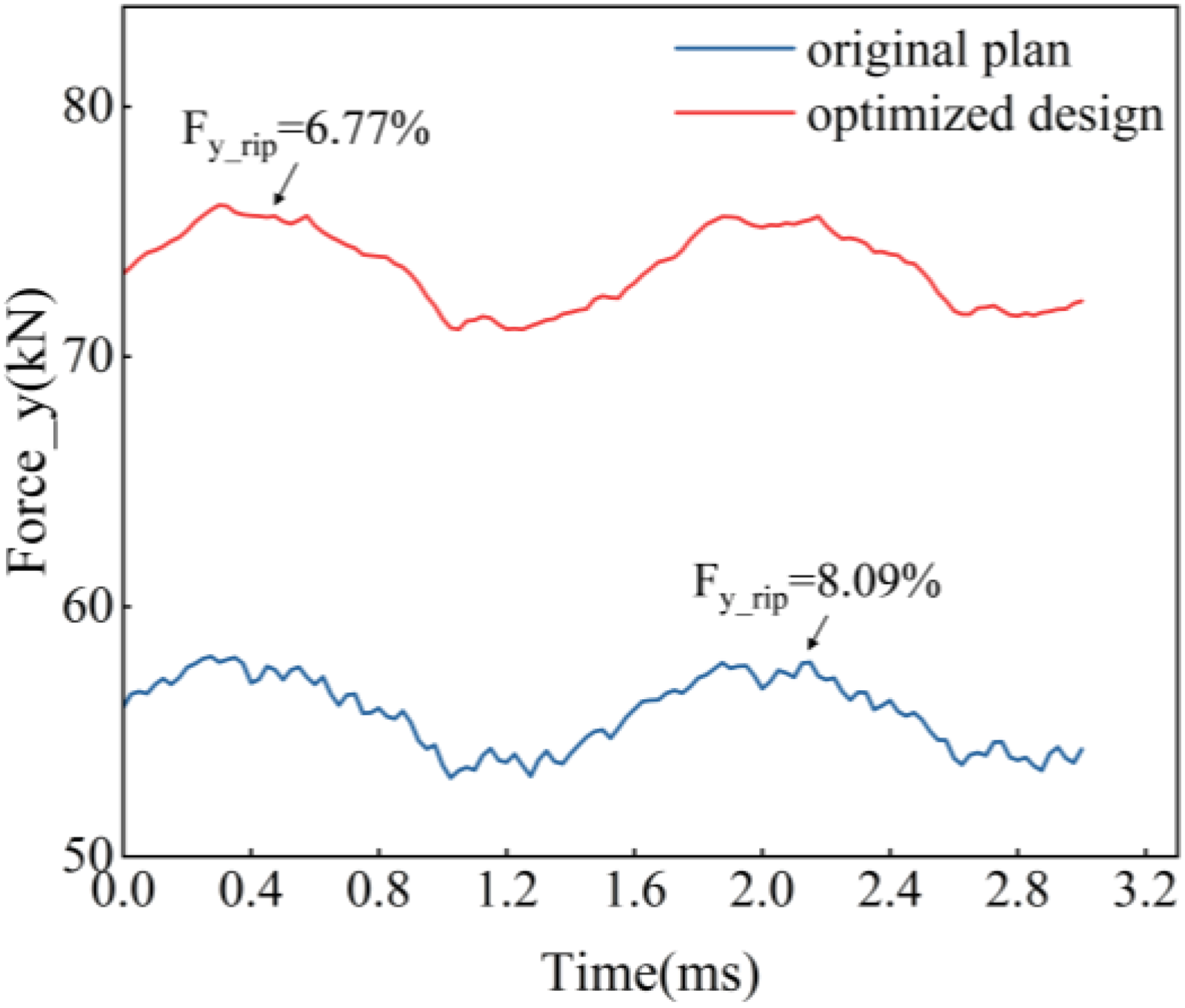
Suspension force performance before and after optimization.
Conclusion
For the multi-objective electromagnetic optimization design problem of LSLSM, this paper proposes a method that combines the AKriging model with INSGA-II to improve the optimization efficiency under high-dimensional design variables and multi-objective conditions. The main conclusions are as follows:
Through sensitivity analysis, the key parameters that strongly affect the overall motor performance can be identified. Sample data are obtained by OLHS and FEA, and a relatively accurate AKriging surrogate model is built to describe the relationship between the optimization variables and the motor performance. Based on the established motor performance prediction model, the INSGA-II algorithm is employed to conduct collaborative optimization of the key performance indicators of the motor, thereby obtaining the structural parameter scheme with superior comprehensive performance. Compared with the initial scheme, the average thrust of the optimized motor increases by 13.44%, while the thrust ripple and the suspension force ripple decrease by 26.62% and 16.32%, respectively. The overall performance of the motor is improved, which is more conducive to meeting the requirements of stability and efficient operation for magnetic levitation applications. Moreover, the proposed MOO framework can also be applied to the optimization design of other motors.
Footnotes
Acknowledgment
This work was supported in part by National Natural Science Foundation of China under Grant 51807124, Natural Science Foundation of China's Hebei Province under Grant E2021210069 and A2022210024, funded by Science and Technology Project of Hebei Education Department under Grant QN2020155. Hebei Graduate Student Innovation and Entrepreneurship Funding Project under Grant YC202545.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Hebei Graduate Student Innovation and Entrepreneurship Funding Project under Grant, National Natural Science Foundation of China under Grant, Natural Science Foundation of China’s Hebei Province, Science and Technology Project of Hebei Education Department, (grant number YC202545, 51807124, A2022210024, E2021210069, QN2020155).
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.