
Abstract
Large-amplitude vibrations of mechanical systems, which are commonly encountered in engineering applications, are examined in this paper using thin cantilever beams with flexible roots and intermediate lumped masses as models. Classical perturbation and linearization methods are insufficient for such systems because they are controlled by a severely nonlinear autonomous conservative oscillator with a fifth-order restoring force. Using the parameter expansion method (PEM), an approximate analytical solution to a generalized nonlinear governing equation is obtained. The universality of the formulation is then demonstrated by specializing the resulting solution to a number of physically relevant anharmonic oscillators. Quantitative comparisons with numerical simulations and established analytical methods show that PEM yields improved accuracy over a wide range of vibration amplitudes while maintaining a compact analytical structure. Unlike conventional perturbation-based approaches, the proposed formulation avoids small-parameter assumptions and enables efficient generation of higher-order terms without algebraic complexity. The results confirm that PEM provides a reliable and computationally efficient framework for analyzing strongly nonlinear oscillatory systems encountered in realistic engineering configurations.
Keywords
1. Introduction
In recent decades, dynamical systems have emerged as a vital and pervasive field of contemporary research. This is because they play a significant role in understanding various important topics across fields like mechanics, physics, and engineering. Often, these scientific and engineering systems are represented mathematically using differential equations.
Differential equations (DEs) are arising naturally to form the foundations of science and engineering. They are considered as useful tools for solving physical problems. Many physical and engineering systems, particularly mechanical oscillators, exhibit non-linear behavior. Consequently, non-linear oscillator models are crucial for accurately describing these systems, as their dynamics are frequently governed by non-linear DEs. Second-order nonlinear differential equations, which frequently arise in modeling problems in fields like mathematical physics, chemical physics, and astrophysics, often lack analytical solutions. While numerical solutions are possible, finding analytical approximations is a key area of research. Stiff problems, in particular, require analytical techniques because they are computationally intensive for numerical methods that need petite step sizes. Many researchers give their time and significant attention to finding approximate solutions to nonlinear equations using numerous analytical techniques. Earlier, several authors used analytical techniques named perturbation methods1–7 in which the nonlinear response is very small. To overcome this specific limitation. Many academics have been interested in investigating nonlinear issues in the last few decades, with an emphasis on using analytical approximation approaches or numerical methods. To create approximate periodic solutions for non-linear differential equations, a number of analytical techniques have been developed. In order to solve these equations and ascertain their physical characteristics, researchers have also developed a variety of methods, such as the Improved Perturbation Method, 8 Aboodh transform, 9 global error minimization method, 10 non-perturbative approach,11,12 Energy balance method, 13 frequency-amplitude-formulation (FAF), 14 homotopy perturbation method, 15 Hamiltonian approach,16,17 global residue harmonic balance method,18–20 spreading residue harmonic balance method,21,22 modified algebraic method 23 and so on.24–27 The sensitivity of the homotopy perturbation method is highlighted by recent studies. For instance, iterative parameter tweaking for convergence was emphasized by Moussa et al. 28 when they used HPM to Duffing-Van der Pol systems. Likewise, Alshomrani et al. 29 used HPM to study epidemic models and stressed the importance of thorough homotopy creation. The significance of choosing suitable initial conditions for nonlinear oscillators was further emphasized by He et al. 30
For highly and severely nonlinear dynamical systems, these works31–40 offer a cohesive study path creating novel and non-perturbative analytical techniques. The suggested methods are rigorously extended to realistic engineering models like cantilever beams and nonlinear ship rolling dynamics, including stability and bifurcation analyses.37–40 They are also applied to high-order nonlinear oscillators, time-delayed systems, and vibration suppression via sophisticated controllers.31–36 When taken as a whole, the studies show how these approaches are resilient and widely applicable, going beyond the boundaries of traditional perturbation techniques.
Moreover, asymptotic and perturbation-based approaches for examining nonlinear multi-DOF dynamical systems with an emphasis on resonance, stability, and control are examined in other publications.41–49 The investigations show how successful asymptotic approaches are in complicated engineering applications, moving from resonant 3DOF and pendulum-type systems41–44 to sophisticated rigid-body and gyrostatic satellite dynamics under torques, electromagnetic effects, and control actions.45–49 By expanding a parameter in a series, the parameter-expansion approach is a mathematical or computer methodology that yields analytic approximations for severely nonlinear differential equations with fifth-order nonlinearity. It is frequently employed to solve differential or nonlinear equations where precise solutions are challenging or unattainable in applied mathematics, physics, and engineering. This approach’s main benefit is that it offers methodical approximations for difficult situations. Can also provide analytical insights on the behavior of the system. Additionally, it functions effectively for minor disturbances. We numerically approximated the answer using the fourth-order Runge-Kutta technique. The correctness of the improved iteration approach is demonstrated by the tables and figures, which show the strong agreement between the analytical and numerical findings.
The main goal of this work is to create a rough analytical solution for the free vibration equation that applies to microelectromechanical systems (MEMS) devices. Comparing the findings of the suggested method with those from the energy balance method based on frequency-amplitude formulation, 14 the homotopy perturbation method based on Aboodh transform, 50 and the non-perturbative approach as in Ref. 11 shows how accurate and effective it is. For the problem at hand, the existing method provides more dependable outcomes. The study comes to the conclusion that the PEM has a lot of promise and can be used to solve other issues that are very non-linear. Adding real-world examples of MEMS oscillators would increase the study’s practical value and demonstrate the PEM’s broad range of applications. He et al.’s recent study 51 on graphene-based resonators, for example, illustrated the intricate nonlinear dynamics present in nanomechanical systems, highlighting the necessity of precise analytical methods to forecast their behavior. Likewise, He 52 created periodic solutions for highly nonlinear MEMS oscillators, providing useful frameworks for describing vibrations at the microscale. Incorporating such case examples highlights PEM’s applicability to new engineering difficulties in the domains of MEMS/NEMS design, resonance tuning, and micro-scale actuation in addition to validating its efficacy in solving high-order nonlinear equations. These illustrations demonstrate that PEM is a practically feasible approach to solving real-world nonlinear systems in cutting-edge technology, in addition to being a mathematically sound instrument. The correctness and computational efficiency of PEM can be further demonstrated by comparing the frequencies generated using PEM directly with those from He is frequency-amplitude formulation in Ref. 53. For instance.
1.1. Main motivation and novelty of the present study
The main driving factor behind this study is the ongoing challenge of analytically characterizing autonomous conservative systems with large-amplitude oscillations controlled by fifth-order nonlinear restorative forces. Micro and nano-electromechanical resonators, flexible cantilever beams with intermediate lumped masses, and sophisticated structural elements are only a few examples of the many contemporary engineering applications that naturally use such systems. Classical linearization and traditional perturbation approaches are useless in these systems because nonlinear effects are dominating rather than perturbative. 54
The majority of current approaches implicitly rely on tiny parameters, auxiliary correction systems, or case-specific assumptions that restrict their accuracy and applicability at large vibration amplitudes, despite the fact that many analytical techniques have been suggested for nonlinear oscillators. Consequently, there is still no single analytical framework that can give clear, precise, and physically interpretable solutions for conservative oscillators that are substantially nonlinear without making unneeded simplifications.
1.2. Experimental and significant practical applications of the of the present study matter
Strongly nonlinear conservative oscillators with high-order restoring forces are observed experimentally and practically in a variety of contemporary engineering systems, such as tapered structural elements, flexible cantilever beams with intermediate lumped masses, graphene-based oscillators, and micro and nano-electromechanical resonators. Large-amplitude vibrations in these systems are frequently seen in lab tests, where quantifiable parameters like backbone curves, resonance frequency changes, and amplitude-dependent stiffness are essential for characterizing performance and evaluating stability. For the interpretation of experimental data, model calibration, and parameter identification, accurate analytical frequency-amplitude relationships are crucial, especially when numerical simulations become computationally intensive or lack physical transparency. Rapid assessment of system behavior under various excitation levels and geometric configurations is made possible by the analytical results obtained using the parameter-expansion method, which offer closed-form expressions that can be directly used in the design, tuning, and control of nonlinear oscillatory devices. As a result, the current formulation is useful for engineering applications involving MEMS/NEMS resonators, vibration-based sensors, and nonlinear structural elements operating outside of the linear regime as well as experimental validation studies.
2. Mathematical model
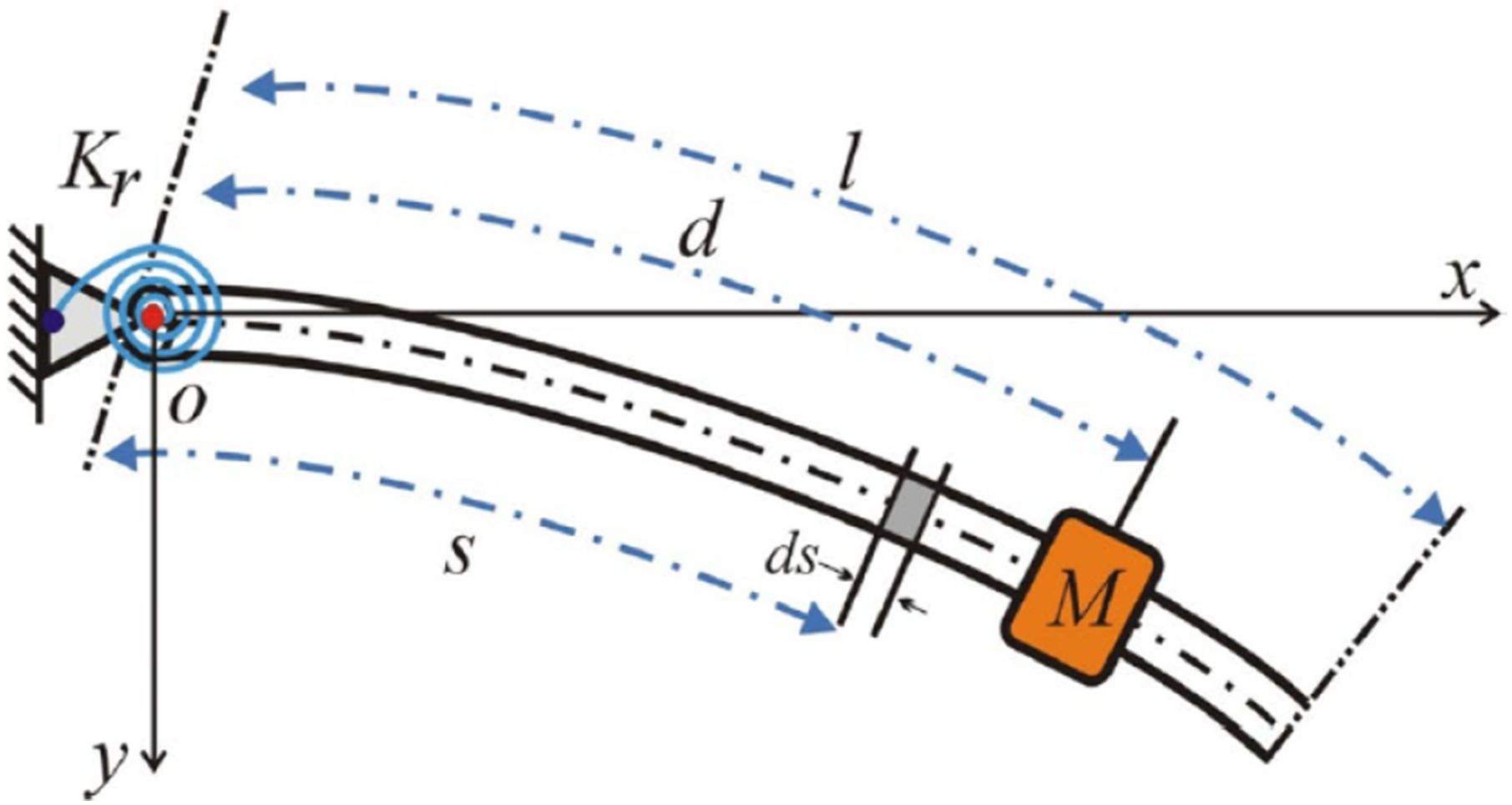
Many mechanical systems include flexible cantilever beams with a relatively light, concentrated mass attached along their length. These beams are often fixed at one end but free at the other and tend to vibrate with large amplitudes. The behavior of these systems, known as autonomous conservative oscillators, is described by a highly nonlinear differential equation that includes a fifth-order term.
In this study, we will consider a uniform, conservative beam of invariable length l, as depicted in Figure 1. The beam is hinged at its base to a rotational spring with stiffness Explains the design of a uniform conservative beam.
11


Equation (1) represents a strongly nonlinear autonomous conservative oscillator. Finding exact analytical solutions for
3. Implementation of the parameter-expansion method (PEM)
This section leverages the parameter-expansion method (as detailed in Ref. 56, 57) to find a solution for Eq. (1). This involves expressing both the solution and its coefficients as series expansions dependent on an artificially introduced parameter



Substituting Eqs. (3–5) into Eq. (1), yields

The coefficient of


We can easily find the solution to Eq. (7) as:

Inserting the value obtained in Eq. (9) back into Eq (8) and eliminating the secular term, the first approximate solution to Eq. (1) is


Eq. (11) is identical to the one presented earlier in Ref. 50.
Similarly, we can get
Inserting Eqs. (9), and (10) into Eq. (3) produces a second-order approximation

We will now investigate various physically relevant scenarios by exploring different sets of force parameters within Eq. (1).
3.1. Special case 1: Motion of a particle on a rotating parabola
By putting

Using the parameter-expansion method, we can determine the frequency of this nonlinear oscillator, as demonstrated in earlier, more general examples.

The approximate solution of Eq. (13) is obtained by the PEM from Eq. (11) as

3.2. Special case 2: Tapered beam
Tapered structural components, like beams with varying widths, are becoming more popular in construction. This is because they offer a great balance of structural performance, cost-effectiveness, and visual appeal, which are key aspects of good structural design. Tapered beams, which mimic shapes found in nature and engineering (like tree branches, turbine blades, and bridges), are often modeled using a specific type of nonlinear differential equation when studying their fundamental vibration behavior.60,61
The given equation of motion for case 2, can be obtained by choosing

The PEM frequency can be obtained from Eq. (14) as:

This result matches those obtained using the FAF-EBM method,
14
the Aboodh transform based homotopy perturbation method
50
and a non-perturbative method.
11
The approximate solution of Eq. (16) is obtained by the PEM from Eq. (12) as

3.3. Special case 3: Autonomous conservative oscillator
By choosing

This equation models the free vibrations of a conservative oscillator with fifth-order nonlinearities. 62
With the help of PEM procedure as previously shown in the general case. The estimated frequency based on amplitude is derived as:

The PEM solution of Eq. (19) is

3.4. Special case 4: Mathews and Lakshmanan oscillator
Similar to the previous cases by putting

This motion equation was obtained from the Lagrangian density of a relativistic scalar field, a notion utilized in the theory of elementary particles.
The nonlinear oscillator’s frequency, obtained via PEM from Eq. (22), is

Since

4. Results and discussions
The effectiveness of the parameter-expansion method (PEM) is assessed through systematic comparisons between the derived analytical and numerical solutions obtained using a fourth-order Runge-Kutta scheme. With a focus on large-amplitude oscillations where strong nonlinear effects predominate, the analysis examines the frequency–amplitude connection as well as the system’s time-domain response under different parameter configurations.
In this study, a highly nonlinear differential equation with fifth-order nonlinearity is analyzed using the parameter expansion approach. Previous research on this oscillator includes evaluations by Moatimid et al.
11
using a non-perturbative method, Manimegalai et al.
50
using the Aboodh transform-based homotopy perturbation method, and Nofal et al.
14
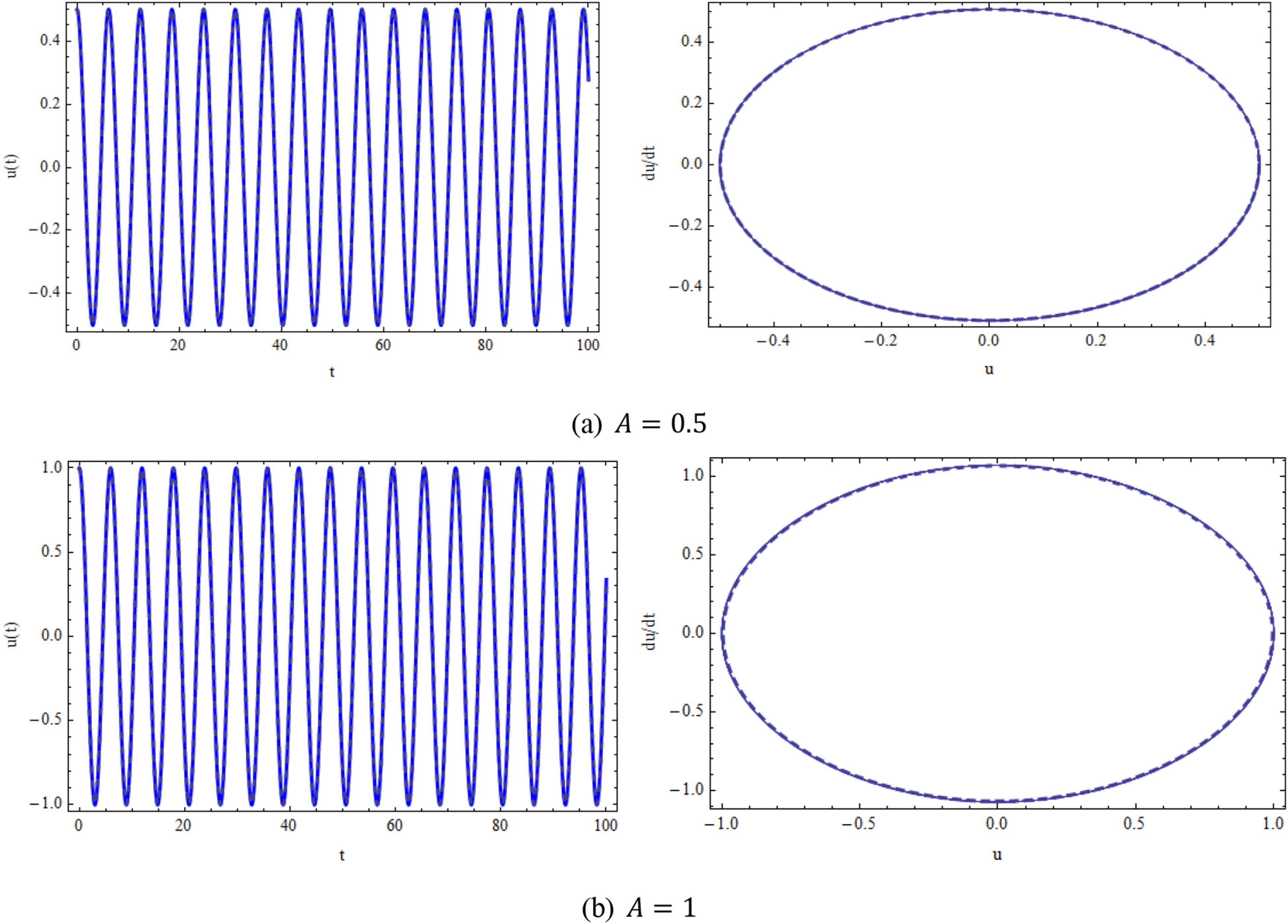
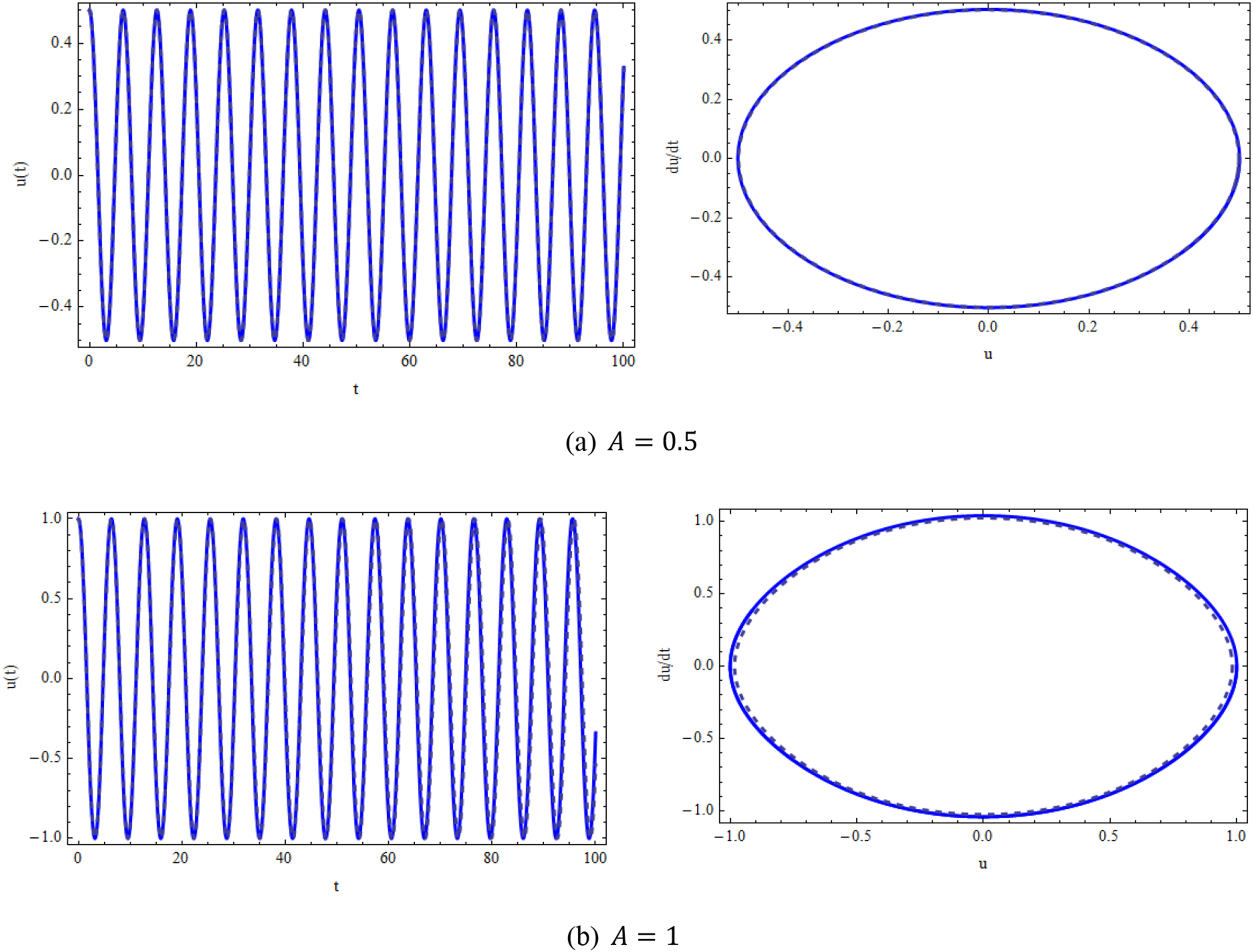
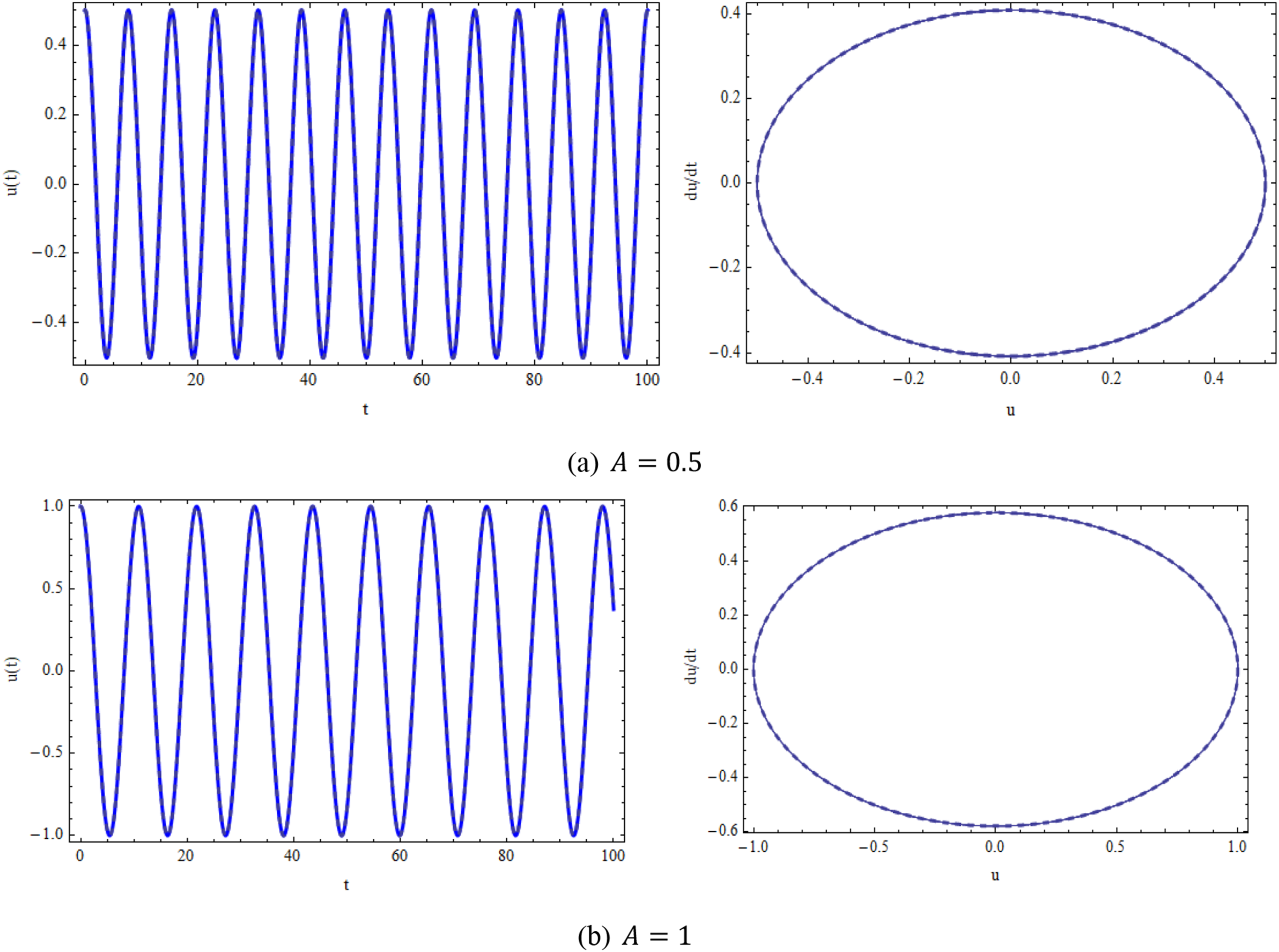
using the amplitude-frequency formulation. This study investigates the issue further, concentrating on the PEM’s accuracy. A simplified version of Eq. (1) yields the estimated frequencies, which are then computed over a range of oscillation amplitudes and contrasted with numerical answers. Furthermore, the displacement solutions obtained in this study are validated against numerical solutions under different conditions, as depicted in Figures 2 and 11–14 which show a comparison between the numerical solutions obtained using Mathematica program and the second-order approximate solutions for A=0.5 and A=1. Comparison of the analytical solutions (dashed line) and numerical method (solid line) for Eq. (1) at 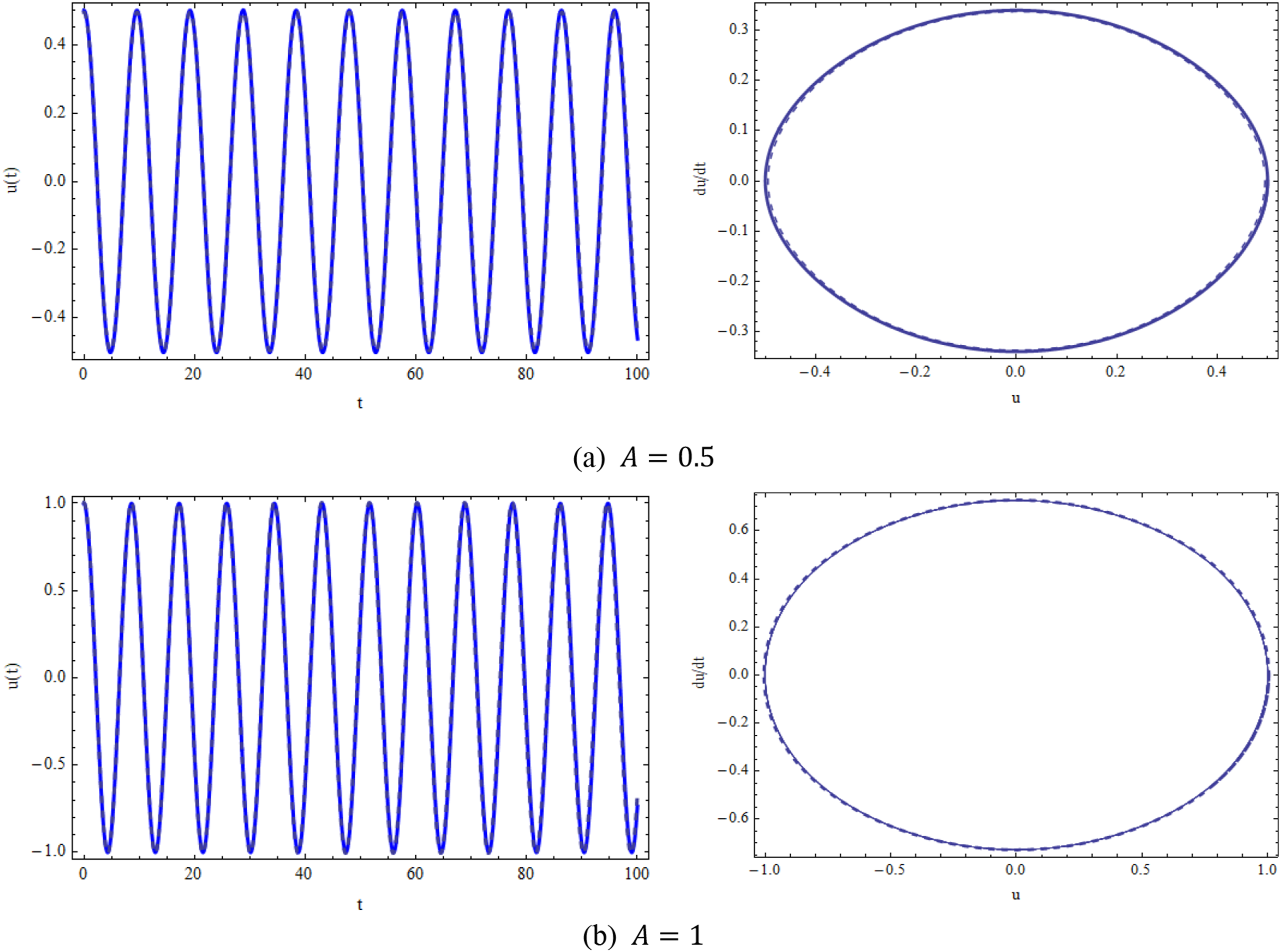
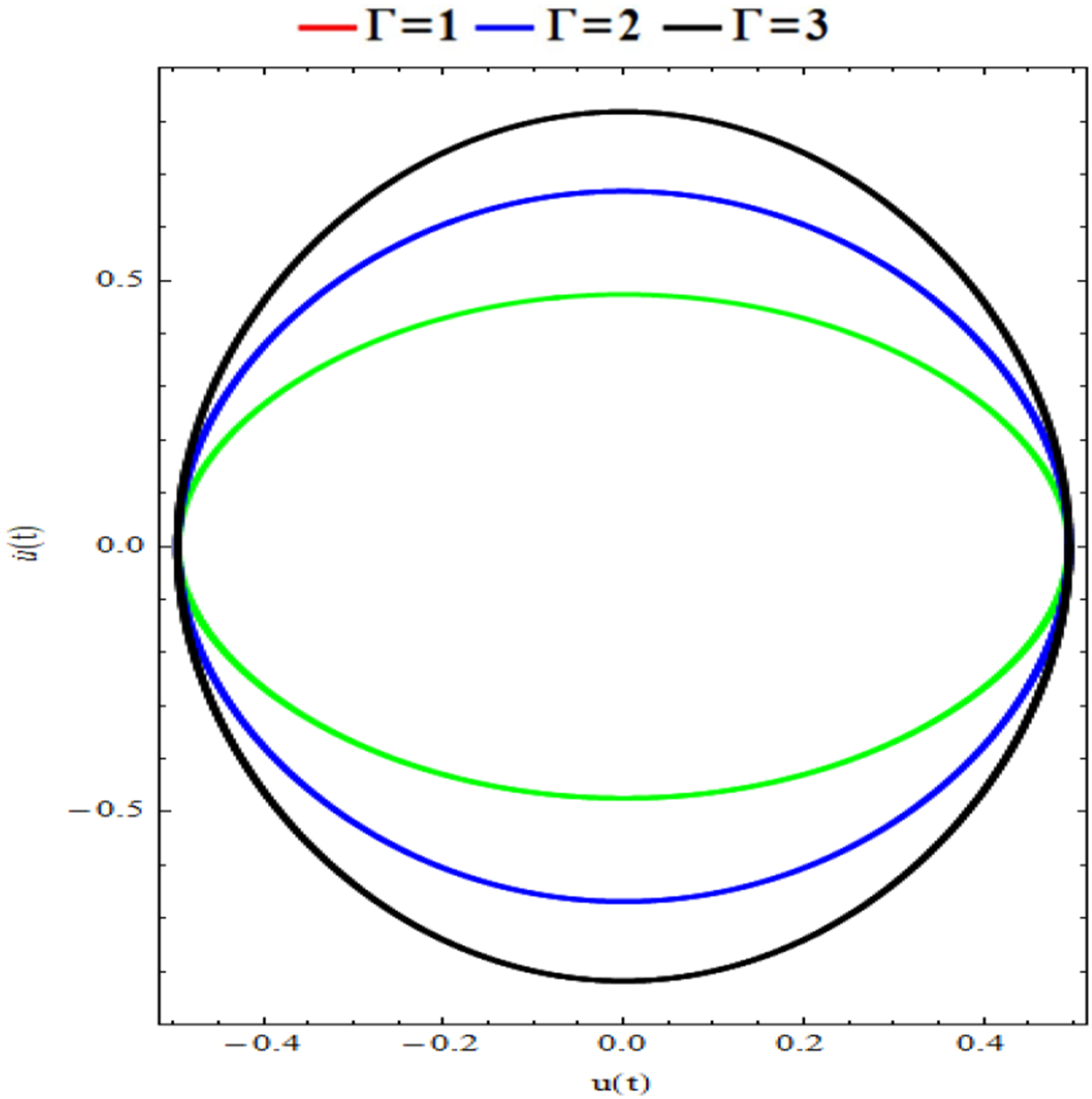
As shown for Γ=1, 2, and 3 in Figure 3, the analytic non-perturbative solution yields periodic waves of constant amplitude. The number of oscillations within the interval is directly related to Γ, increasing as Γ increases. To verify that this behavior is stationary over time, the associated phase plane diagrams are provided in Figure 4. Plots the time dependent solution for Presents the phase plane diagram for 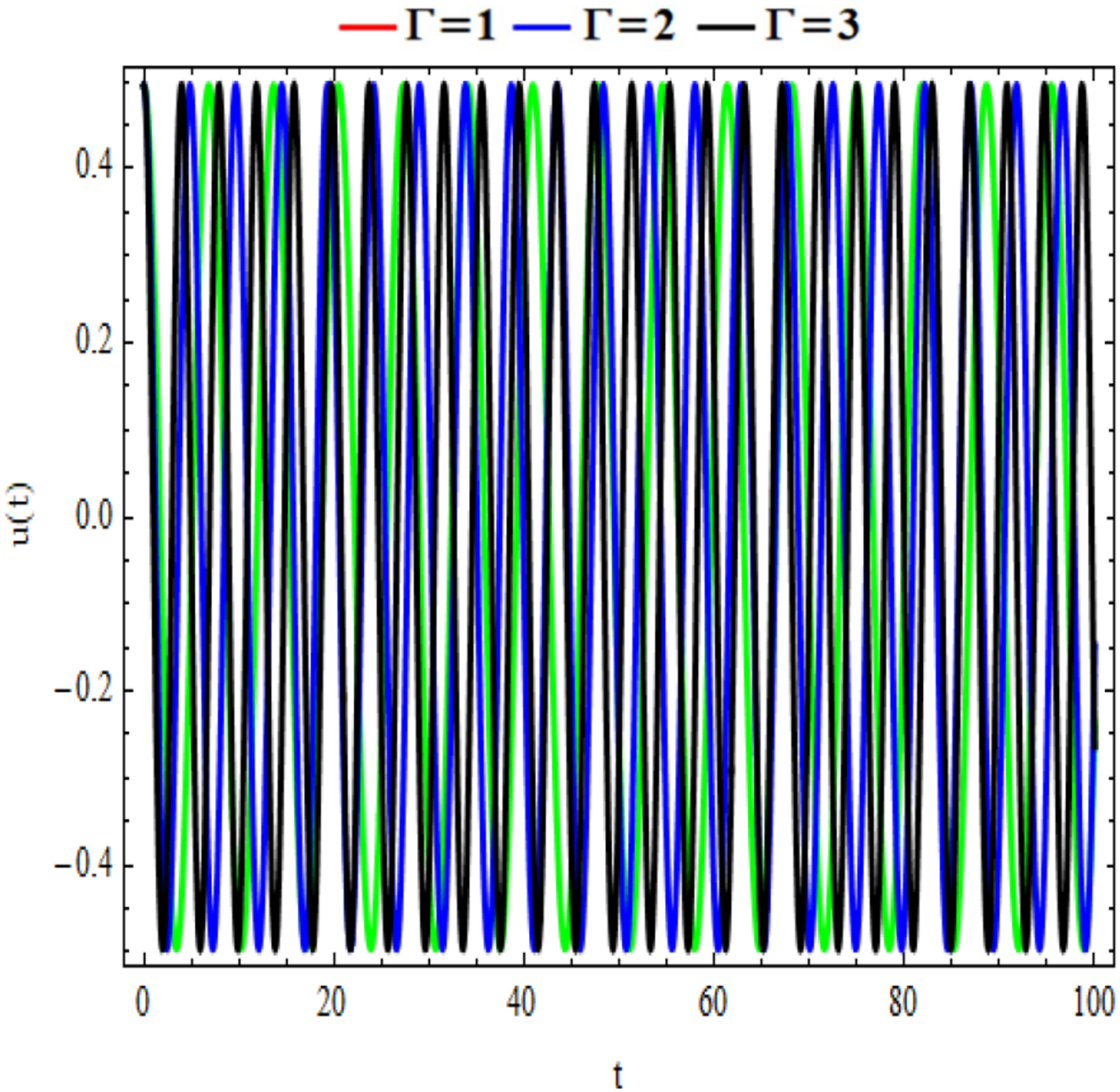
To study the influence of individual parameters on the NPA’s temporal behavior, Figures 5(a)–10(a) was generated. Each Figures 5(a), 6(a), 7(a), 8(a), 9(a) and 10 varies a single parameter (Γ, a1, a2, a3, a4, b1, or b2 using the specified values, respectively) while holding others constant. Examination of these figures confirms that the NPA behaves as periodic waves during the observed time. Furthermore, the oscillation frequency increases with the parameters varied in Figures 5(a), 7(a), 8(a), and 9(a) while it is unaffected by the parameters changed in Figures 6(a) and 10(a). Presents the time-dependent solution when Time-dependent solution for Shows the time-dependent solution for Shows Shows Designates 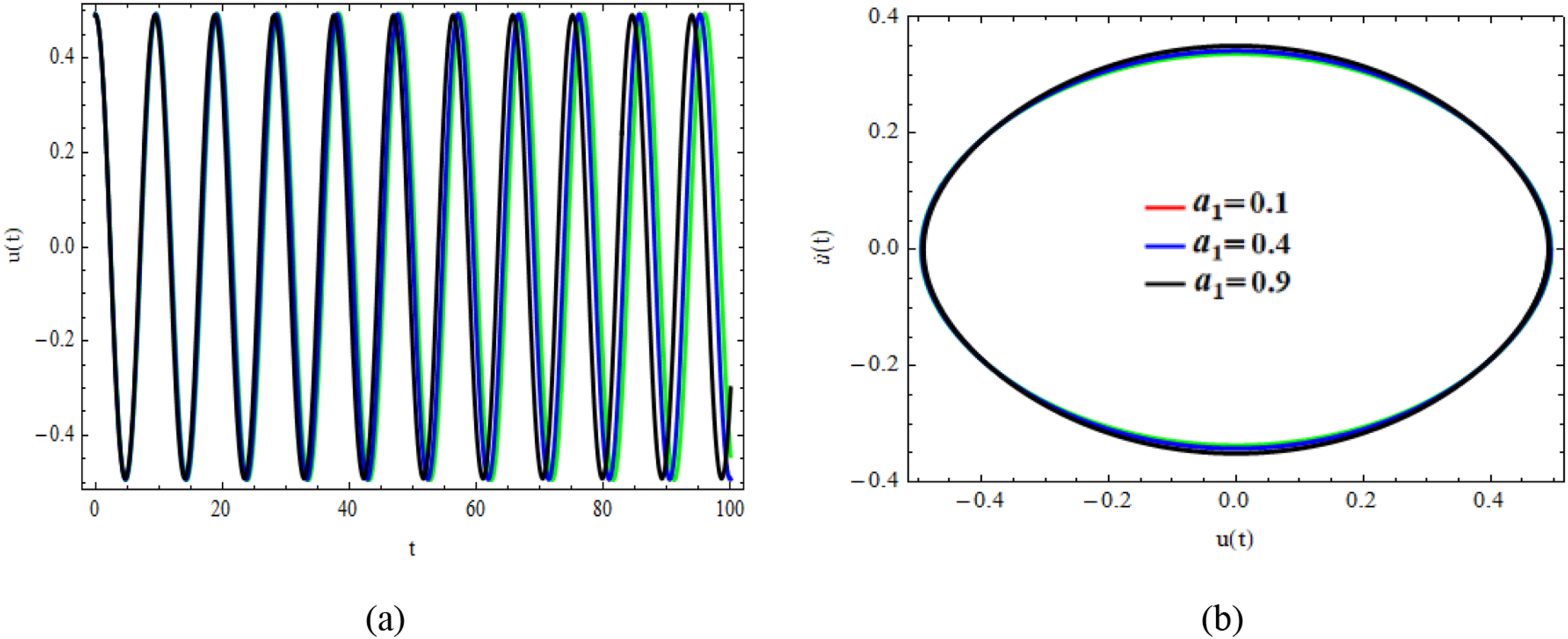
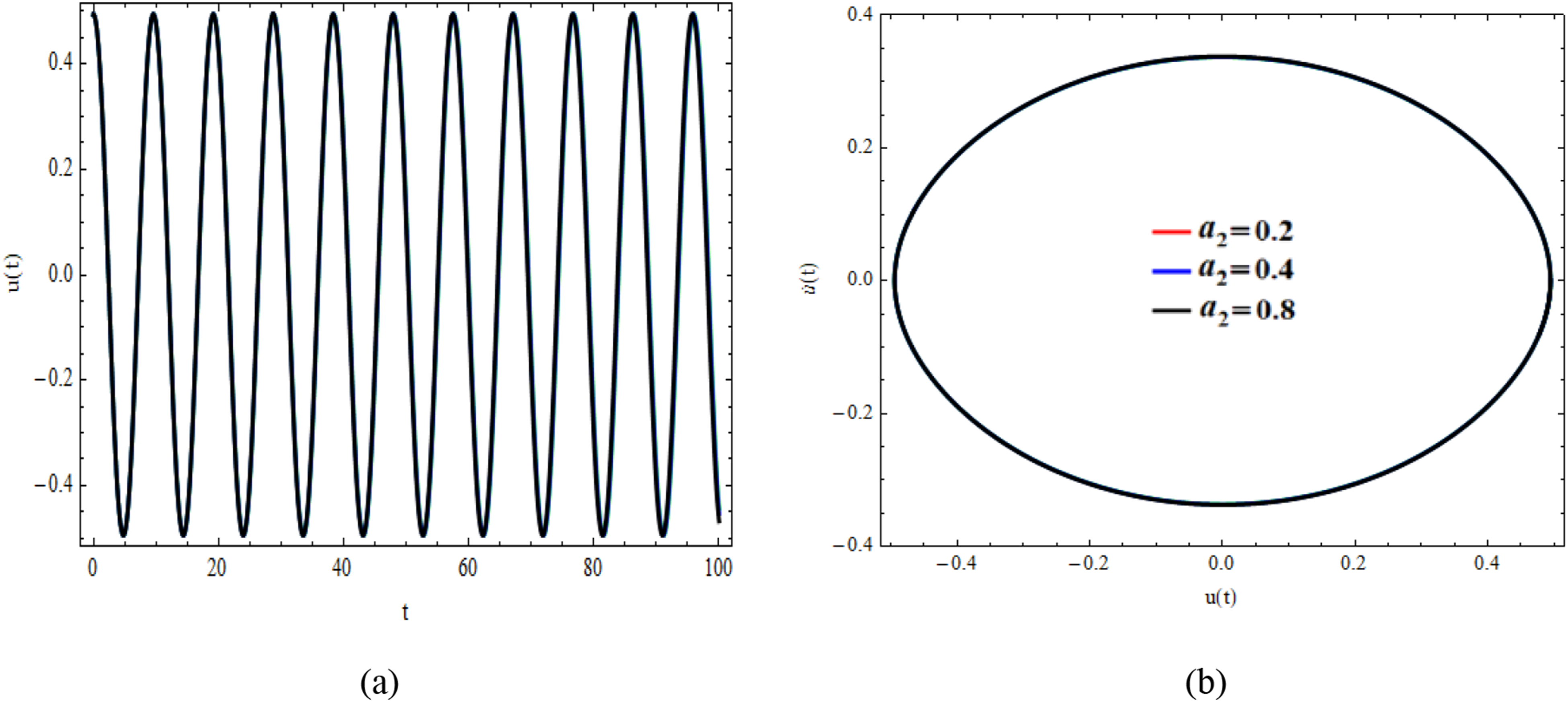
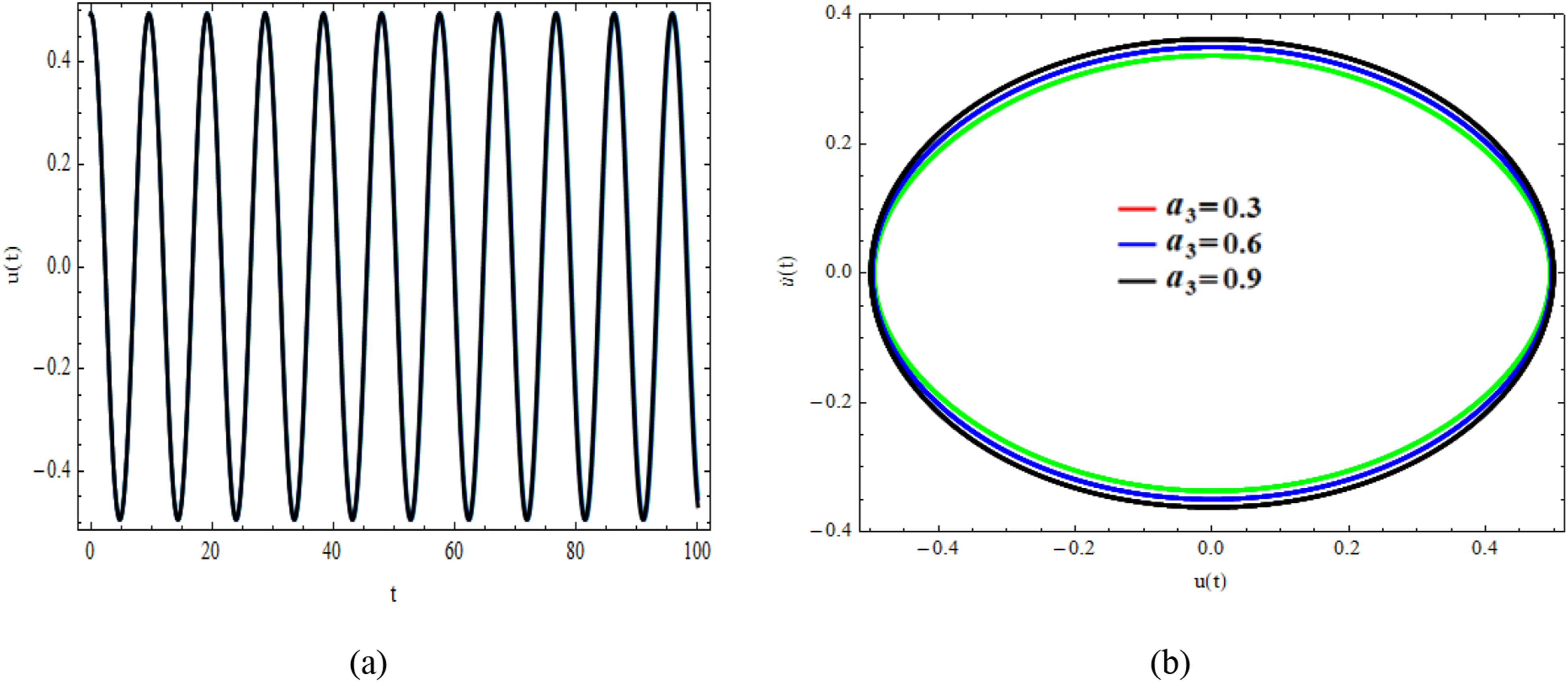
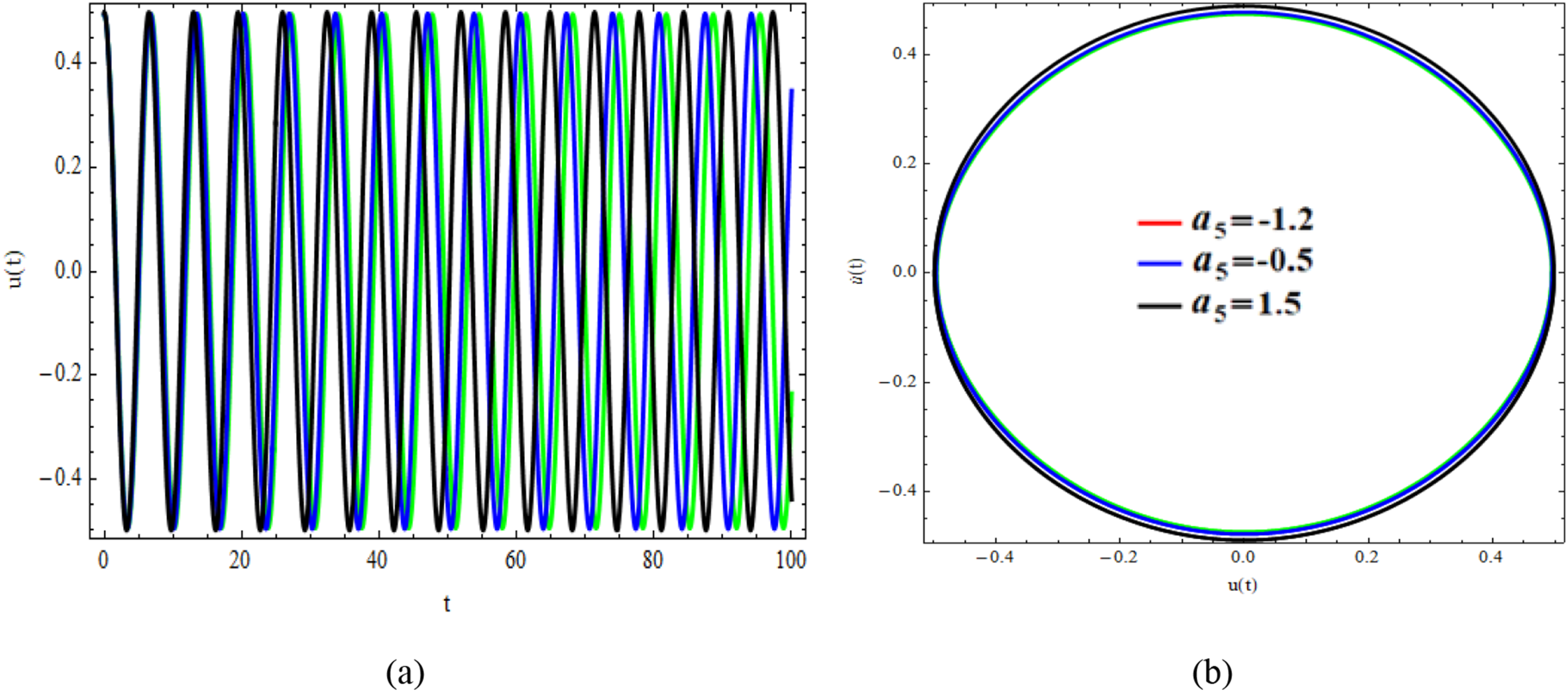
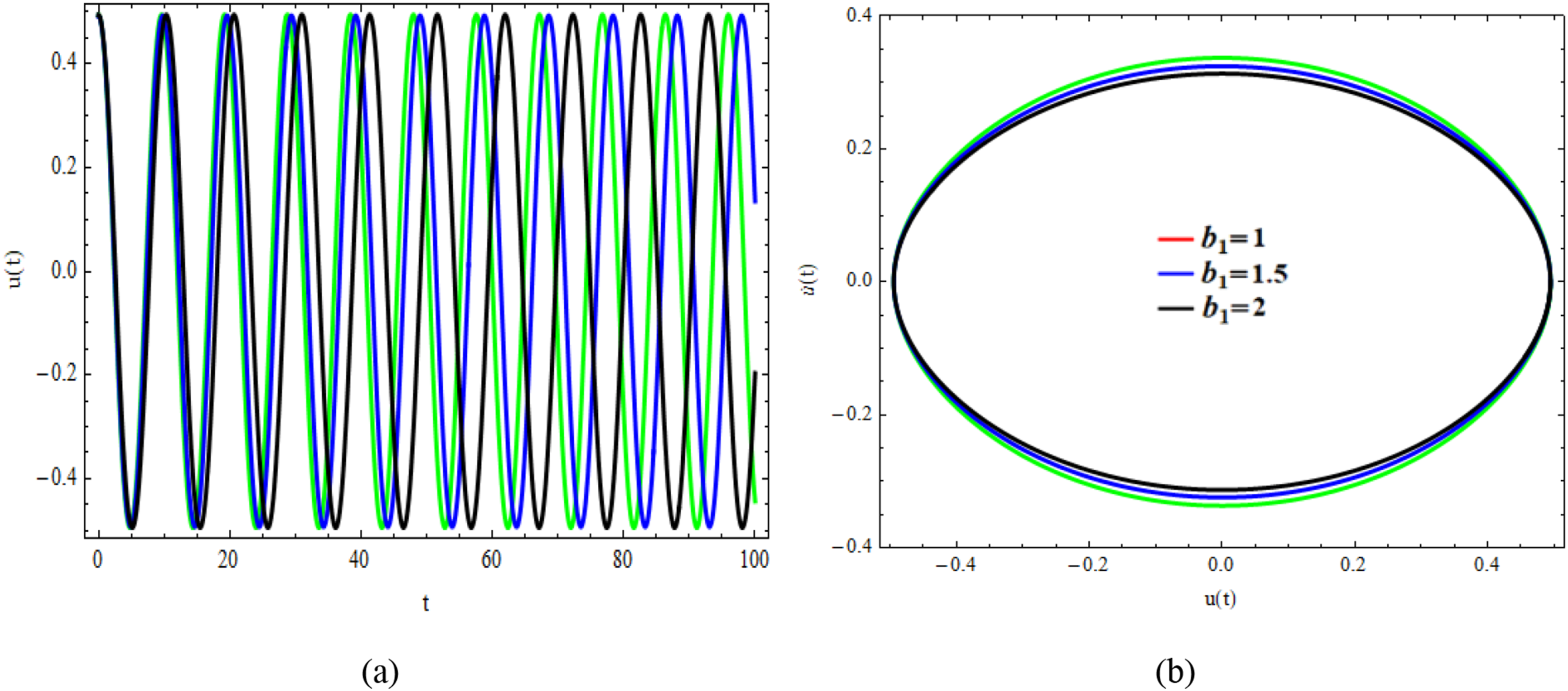
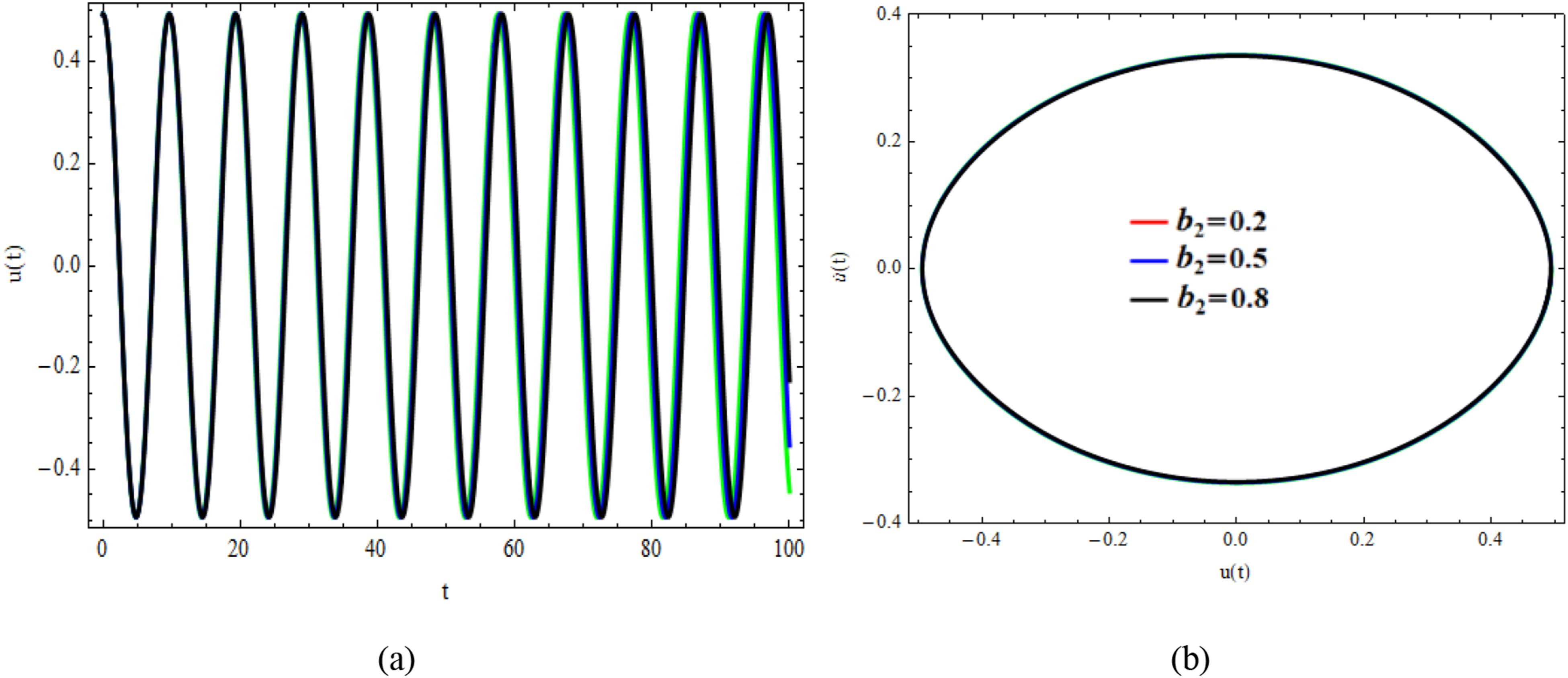
However, these factors have little effect on the wave amplitude, suggesting that their main effect is on the oscillatory frequency. Using the same parameter values from Figures 5(a)–10(a), the equivalent phase plane diagrams for the NPA solutions are shown in Figures 5(b)–10(b). The stability of these solutions and the lack of chaos within the studied range are confirmed by an examination of the phase plane diagrams (Figures 5(b)–10(b)) and the temporal plots (Figures 5(a)–10(a)).
The suggested method’s resilience is further supported by the time-history comparisons shown in Figures 2 and 11–14. Over long time periods, the PEM solutions faithfully replicate the phase and amplitude of the numerical responses, suggesting that error buildup is kept to a minimum. In contrast, several existing analytical methods reported in the literature require iterative corrections or additional tuning parameters to achieve comparable accuracy, particularly for large-amplitude vibrations. Comparison of the analytical solutions (dashed line) and numerical method (solid line) for Eq. (13) at Comparison of the analytical solutions (dashed line) and numerical method (solid line) for Eq. (16) at Comparison of the analytical solutions (dashed line) and numerical method (solid line) for Eq. (19) at Comparison of the analytical solutions (dashed line) and numerical method (solid line) for Eq. (22) at 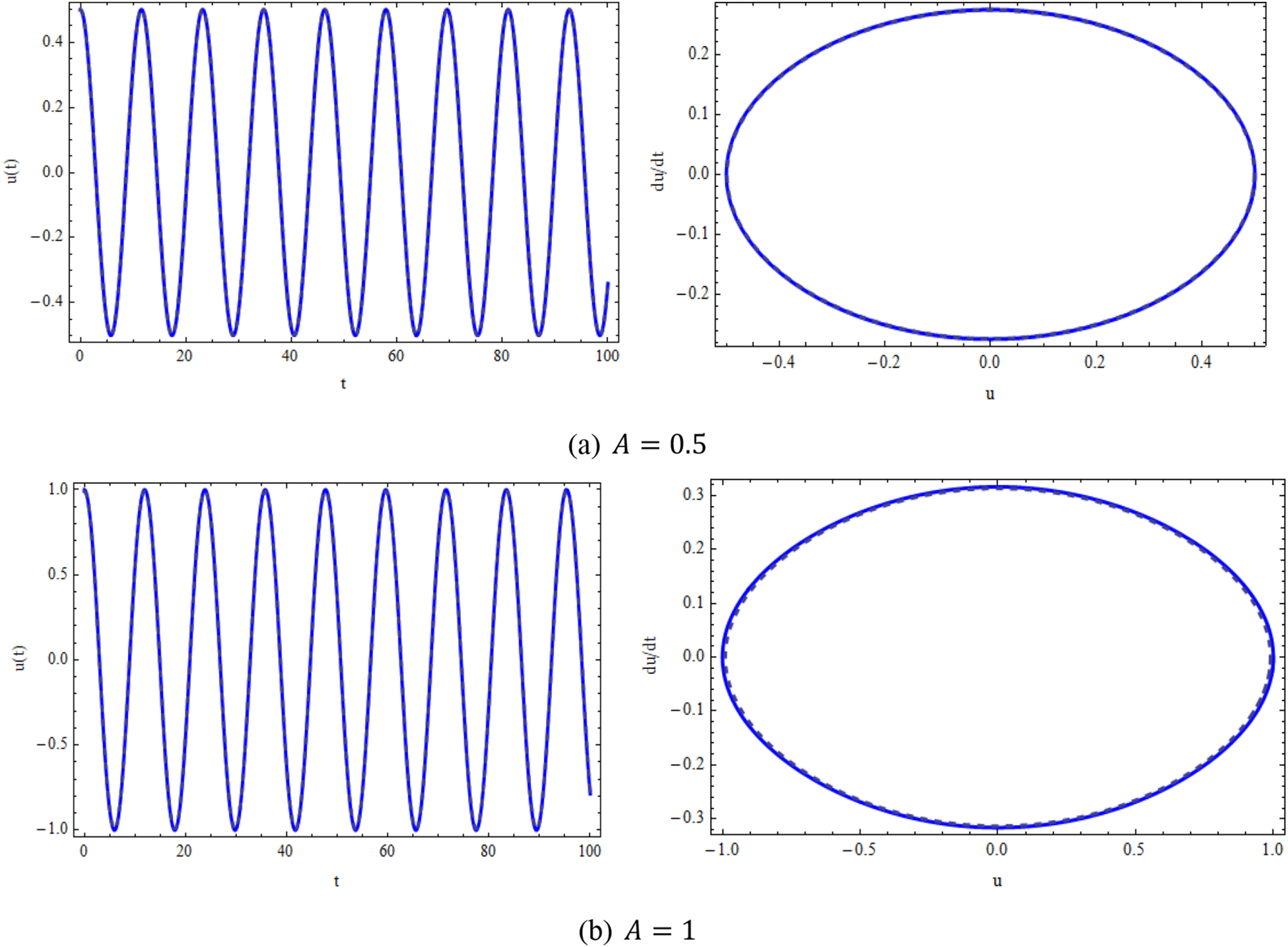
In this work, autonomous conservative oscillators controlled by a fifth-order nonlinear differential equation are analyzed using the PEM in a useful way. The authors successfully show how PEM may be used to get precise analytical approximations for complicated nonlinear systems, especially cantilever beams with flexible roots and intermediate masses. The study makes a strong case for PEM’s superior simplicity and accuracy by verifying results against numerical simulations and contrasting them with well-known techniques (such as FAF-EBM and Aboodh transform-based homotopy). The inclusion of diverse special cases (e.g., rotating parabola, tapered beams) highlights the method’s versatility and broad applicability in engineering contexts. The following changes would increase the work’s impact and clarity, even though it is ready for publication. Both numerical and analytical solutions, validated through Mathematica software program, demonstrate good agreement, confirming the strength of the present method.
5. Conclusion
In order to estimate the frequencies and periodic solutions of highly nonlinear oscillators given by a fifth-order nonlinear differential equation, this work presents a simple and efficient analytical method called parameter expansion. The main advantage of the method is its simplicity, and regardless of how big or tiny the oscillations are in amplitude, the results it generates roughly resemble numerical solutions. One of the main conclusions of this study is that the PEM framework offers a single analytical structure that can be used to a variety of physically relevant nonlinear oscillators, such as tapered beams, cantilever beams with intermediate lumped masses, and classical nonlinear models. The obtained frequency-amplitude relations, which provide more compact expressions and less computational effort, match or surpass those reported by current analytical techniques in every situation studied. The parametric studies also showed that changes in higher-order nonlinear coefficients mostly affect the oscillation frequency instead of the vibration amplitude, which is in accordance with the system’s conservative nature. The parametric analyses shown in Figures 5–10 shed more light on how nonlinear coefficients affect the dynamics of the system. These numbers unequivocally demonstrated that changes in higher-order nonlinear factors mostly impact the oscillation frequency while maintaining an unaltered vibration amplitude. This pattern, which is consistently shown in all of the cases that were studied, is a significant finding of the current work because it emphasizes how fifth-order nonlinear terms-rather than amplitude regulation-play a prominent role in frequency modulation. This kind of knowledge is very helpful for designing and fine-tuning nonlinear oscillatory systems, where frequency control is essential.
The universality and flexibility of the suggested formulation were shown by the analysis of several particular instances, such as rotating parabolic motion, tapered beams, and classical conservative oscillators. In every instance, the PEM-derived frequencies matched those found by well-established analytical methods and showed excellent agreement with numerical data. The PEM’s higher analytical efficiency and practical application were confirmed by the fact that, in contrast to previous approaches, it consistently produced compact closed-form expressions that were correct throughout a wide amplitude range.
This work was motivated by the need for a general and practically applicable analytical framework for strongly nonlinear conservative oscillators operating outside of the weakly nonlinear regime. The results show that the parameter-expansion method offers a useful solution to this long-standing analytical problem.
In summary, this work effectively used the PEM to examine the intricate dynamics of systems controlled by a highly non-linear differential equation, such as slender cantilever beams with flexible roots and intermediate lumped masses. Compared to other approximation approaches, the PEM performs better, especially in physically realistic settings, and offers a simple and accurate approximate analytical solution. PEM is a useful tool for engineering applications because it provides a faster and more effective method for comprehending and forecasting the behavior of these difficult nonlinear oscillators by instantly producing analytical solutions without requiring intricate calculations.
5.1. Future scope
It makes sense to expand the analytical framework created in this study in a number of ways. Incorporating damping and external excitation into the governing equations is a crucial next step that would allow the parameter-expansion method to be used to analyze forced and non-conservative nonlinear oscillators. The study of stability boundaries, bifurcation behavior, and resonance phenomena in substantially nonlinear systems would be made possible by such an extension. Further insight into anomalous dynamic responses can be gained while maintaining analytical tractability by adapting the current formulation to oscillators defined by generalized or fractional-order derivatives. Applying the suggested method to experimentally achievable MEMS and NEMS systems is another exciting avenue. In this case, the resulting closed-form frequency-amplitude relations might be used for model calibration and parameter identification. These additions would increase the suggested method’s relevance to theoretical research and real-world engineering applications, as well as its scope of application.
Footnotes
Acknowledgments
Princess Nourah bint Abdulrahman University Researchers Supporting Project number (PNURSP2026R443), Princess Nourah bint Abdulrahman University, Riyadh, Saudi Arabia. The researchers wish to extend their sincere gratitude to the Deanship of Scientific Research at the Islamic University of Madinah for the support provided to the Post-Publishing Program.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was funded by Princess Nourah bint Abdulrahman University Researchers Supporting Project number (PNURSP2026R443), Princess Nourah bint Abdulrahman University, Riyadh, Saudi Arabia.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.