
Abstract
Aiming at services such as nearby consumption and flexible interaction of new loads, it is necessary to achieve higher precision clock synchronization of local equipment, and the public network transmission delay fluctuates randomly, which cannot meet the corresponding accuracy requirements. In order to get rid of the limitations brought by public network transmission, distributed clock synchronization replaces the centralized timing of the master station through information exchange between nodes to achieve higher precision clock synchronization. However, in the process of distributed synchronization, a large amount of information will be exchanged between key nodes of the link and their neighbors, but the concurrent transmission capacity of key nodes such as dedicated power gateways and centralized coordinators (CCOs) is limited, which is difficult to meet the corresponding communication requirements. In order to solve the above problems, this paper proposes a time-triggered distributed synchronization scheme based on node priority, which can meet the requirements of high-precision synchronization and reduce the transmission burden of link aggregation nodes such as power dedicated gateways and CCOs.
Introduction
Public network information transmission experiences significant delay fluctuations, making it challenging to meet the high-precision synchronization requirements of certain new power applications through centralized time distribution. To mitigate the impact of public network transmission delays on synchronization accuracy, local synchronization via clock information exchange among distributed devices is necessary. In distributed synchronization, the absence of a centralized reference clock necessitates information exchange between nodes to establish a standard reference time, which may deviate from standard coordinated time. The basic implementation process of distributed synchronization involves the following steps: based on the clock data packets broadcast by neighboring devices, user devices compare their own clock state with that of neighboring devices and further adjust their clocks. Currently, clock adjustment in distributed synchronization involves establishing dynamic equations for nodes,1,2 determining the node clock as a function of its current clock state and neighboring clock states. Parameters compensation values for the equations are obtained through the exchange of clock information between nodes, enabling distributed synchronization in wireless network scenarios. 3 Therefore, frequent exchanges of clock information between neighboring nodes occur, with many critical link neighbors and high pressure from concurrent data packet transmissions. 4 In power networks, not only is network bandwidth capacity limited, but the concurrent transmission capability of critical nodes such as power-specific gateways and CCOs is also constrained, making it difficult to achieve concurrent data packet exchanges among hundreds to thousands of devices in a distributed network.5,6 Hence, optimization of the information exchange process in distributed synchronization for power networks is necessary.
In traditional sensor networks, a reference node is set up and synchronization is gradually achieved around this central reference node, which still places a significant transmission burden on the central node. 7 Shi et al. proposed a rapid flood-based multicast clock synchronization method with real-time delay compensation, 8 which significantly improves synchronization accuracy by estimating cumulative errors. However, this method incurs high network resource consumption due to broadcasting floods after estimating errors through bidirectional time exchanges. For distributed system synchronization in Wi-Fi networks, Chen et al. proposed a PTP synchronization method based on a combination of software and hardware timestamps, implemented on x86 and ARM hardware platforms. Nevertheless, this method still requires substantial information exchange. 9 Yan et al. applied Graph Neural Networks to the resilient synchronization of aerial swarms with low communication overhead. 10 However, it requires strong computing power of terminal devices, which does not match the power scenario.
In order to reduce the burden on central nodes, distributed cooperative synchronization schemes do not require a reference node. Therefore, all nodes achieve clock synchronization of the whole network through peer-to-peer interaction with neighboring nodes in existing methods. For example, Yildirim et al. utilize an adaptive proportional-integral controller to compensate for deviations between different clocks. 11 However, the method of adjusting constants under specific conditions does not effectively address the deviations. Tian et al. employ an undirected graph network model to address multi-agent synchronization issues with communication delays, 12 but this approach may still result in steady-state errors. Parvez et al. proposed a synchronization scheme based on Gossip algorithms. 13 To reduce bandwidth usage, this scheme randomly exchanges information between only two users at a time, which leads to slow convergence of the algorithm.
In practical implementations of synchronization schemes, continuous exchange of information between nodes is required. However, the capacity of power networks is highly constrained, and random fluctuations in transmission delays due to network bandwidth limitations are common, affecting the convergence of algorithms.14,15 As a result, some researchers have explored event-triggered mechanisms to reduce interaction frequency. Dimarogonas et al. proposed a distributed event-triggered control mechanism with a single integrator but only considered state-based triggering without accounting for time-based triggers. 16 Kadowaki et al., based on event-triggered mechanisms, 17 designed a clock synchronization mechanism for sensor networks. Nonetheless, their approach still requires a reference node, which incurs significant transmission pressure on the reference node, making it unsuitable for power distribution networks. Andras et al. purposed a novel synchronized system based on a dithering algorithm to improve the frequency resolution of the integrated phase-locked loop (PLL), as the frequency resolution of these integrated PLLs is found to be to limiting factor. 18 However, this type of algorithm is highly hardware depended leading to the high cost of equipment.
With a vast number of devices and multiple services coexisting, the actual power network faces large volumes of transmitted information and complex topologies, resulting in significant delays in public network transmission. Existing works have not addressed the high-precision synchronization requirements for device interactions in the context of long public network delays. This paper proposes a time-triggered distributed synchronization scheme based on node priority, which meets high-precision synchronization needs while reducing the transmission burden on aggregation nodes such as power-specific gateways and CCOs.
Distributed clock synchronization model
Distributed smart grid model
In the context of renewable energy power networks, two synchronization mechanisms defined by IEEE 1588 protocol—End-to-End (E2E) and Peer-to-Peer (P2P)—coexist. These mechanisms can be represented using a directed graph
For each user device in the distributed network, it is assumed that a nonlinear system dynamic equation is used to represent the current clock state and its offset, as well as the clock inputs from neighboring nodes. This can be formulated as:

The
Assume that the nonlinear mapping
Assume that the graph
Distributed clock error adaptive adjustment scheme
The event-triggered synchronization mechanism
To meet the stringent communication bandwidth constraints of power networks and reduce the number of data packet exchanges between user devices, this section proposes a design based on an event-triggered mechanism. Let



Assuming that communication delays between user devices can be neglected, it follows that after device j broadcasts its clock information (for all successor neighbors k of device j). The remaining neighbors receive it immediately, as all devices now share identical information about j’s state. In the model, we have further assumed that the global estimate inherits the same dynamic structure as the local estimate. In this case, the input can be represented by equation (5).

It is crucial to find an appropriate pair of

For each user j, there is a deviation between the true clock value and the estimated value from other devices, which can be expressed as equation (7):

If the estimation deviation of a user towards its neighboring users is bounded, the system synchronization error will also be bounded. When

Clock synchronization strategy based on node priority
In practical power networks, the concurrent transmission capability of critical nodes in links, such as CCO, is constrained, making it challenging to meet the demands for frequent clock information exchanges with all nodes. To further alleviate the information transmission burden on critical nodes in links, a threshold function design based on node priority has been proposed, as illustrated in equation (9).


Distributed clock error adaptive adjustment scheme


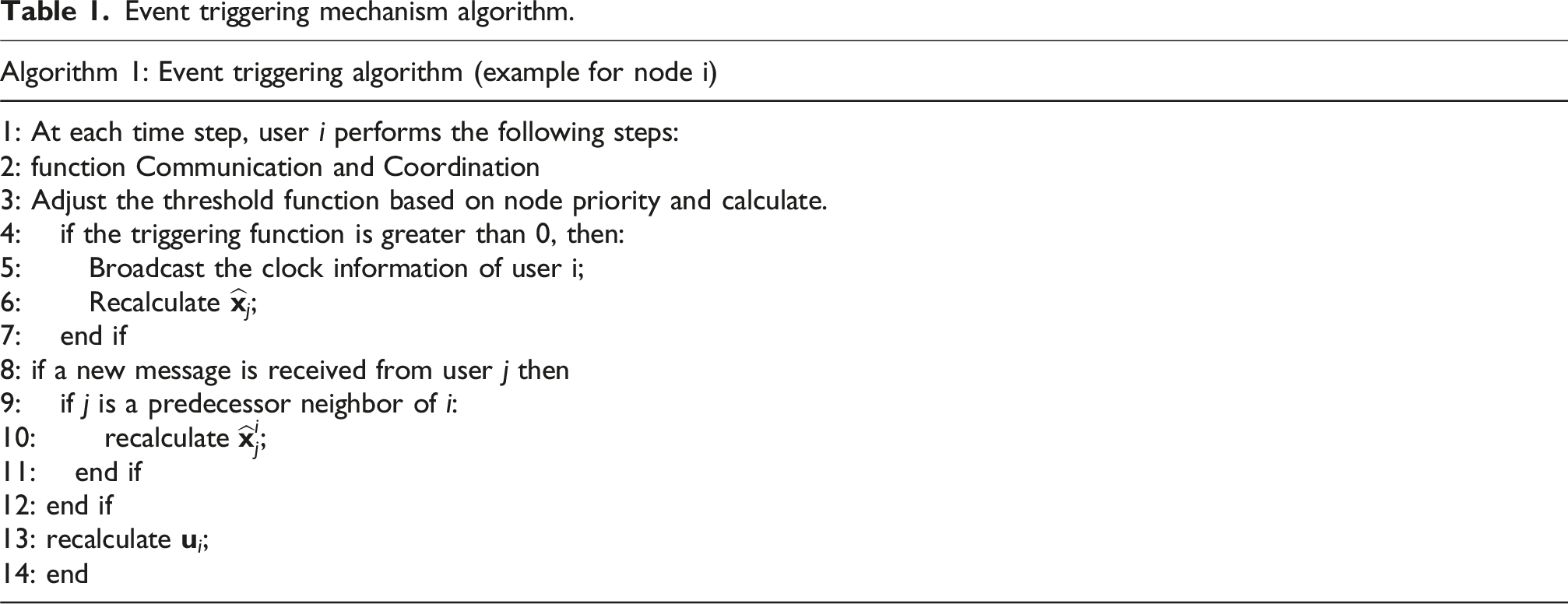
Event triggering mechanism algorithm.
The matrix can be represented as equation (13) if and only if all devices achieve synchronization.
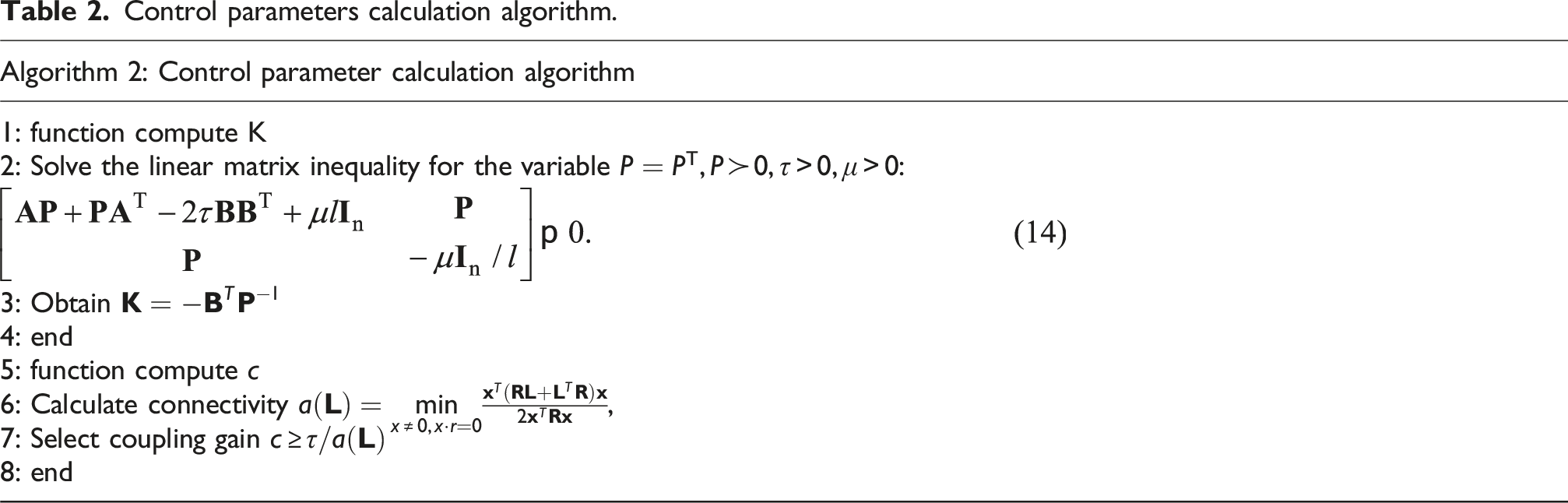
Linear Matrix Inequalities (LMIs) are used to ensure that a positive definite matrix
Let γ be the vector function containing all thresholds. Assume that a solution to the LMI problem in Algorithm 2 exists, that is, the algorithm converges. It is necessary to prove that the following three theorems hold:





Proof of Theorem 1
To prove the existence of Theorem 1, substitute the input expressions, and the synchronization mechanism’s expression becomes (20).
Thus, the synchronization error is expressed as (22).
A Lyapunov function can be defined as (23).
Since 

Thus, the upper bound of 
Let 
Since 
Next, we need to compute the upper bound for 
The upper bound of 
The upper bound of 

Proof of Theorem 2
Define two K-class functions:

Clearly, the Lyapunov function satisfies 
For all users
Proof of Theorem 3
To prove the existence of a minimum event interval when 
The last formula is derived from the Lipschitz property of the function. To find the upper bound for 

Since it has been previously proven that 
Applying the Gronwall–Bellman inequality, (40) is derived.
Since synchronization events are triggered only when 
Since there is a positive lower bound on the intervals between events, there are no accumulation points for synchronization errors in the sequence, and Zeno behavior does not occur. Thus, Theorem 3 is proved.
The proof of Theorem 1 shows that the synchronization error is bounded for any bounded threshold function, and in an event-triggered mechanism, the threshold function is used to adjust communication rates and synchronization performance. The result in Theorem 2 extends Theorem 1, indicating that if the threshold function converges, the synchronization error vector will also converge. That is, by reducing
Simulation results analysis
Synchronization convergence analysis
In this section, MATLAB is used to numerically simulate the algorithm proposed earlier to verify the convergence of the distributed clock error adaptive adjustment scheme. First, the feasibility of the synchronization scheme is tested in a linear network scenario with three users. The whole procedures of the simulation can be conclude in four steps: (1) (2) (3)
The network topology is illustrated in Figure 1, where User 1 can only receive time information from User 2, and Users 2 and 3 can synchronize time with each other equivalently. Synchronization topology model for three users.
The simulation runs for 10 s with the smallest sampling time set at 1 millisecond, meaning each iteration occurs every 1 millisecond. The state equations have specific parameter settings as follows:
The state variable 
Using MATLAB’s CVX toolbox, the calculations yield:
Figure 2 shows the results of the distributed synchronization scheme with an event-triggered mechanism. The figure illustrates that all four states of the user devices asymptotically synchronize. This means that the clocks of the users gradually achieve consistency and follow a common trajectory. Additionally, the entire synchronization process completes within 5 s, making it suitable for rapid deployment and adjustment in distributed power networks. Synchronization trend curve for three users.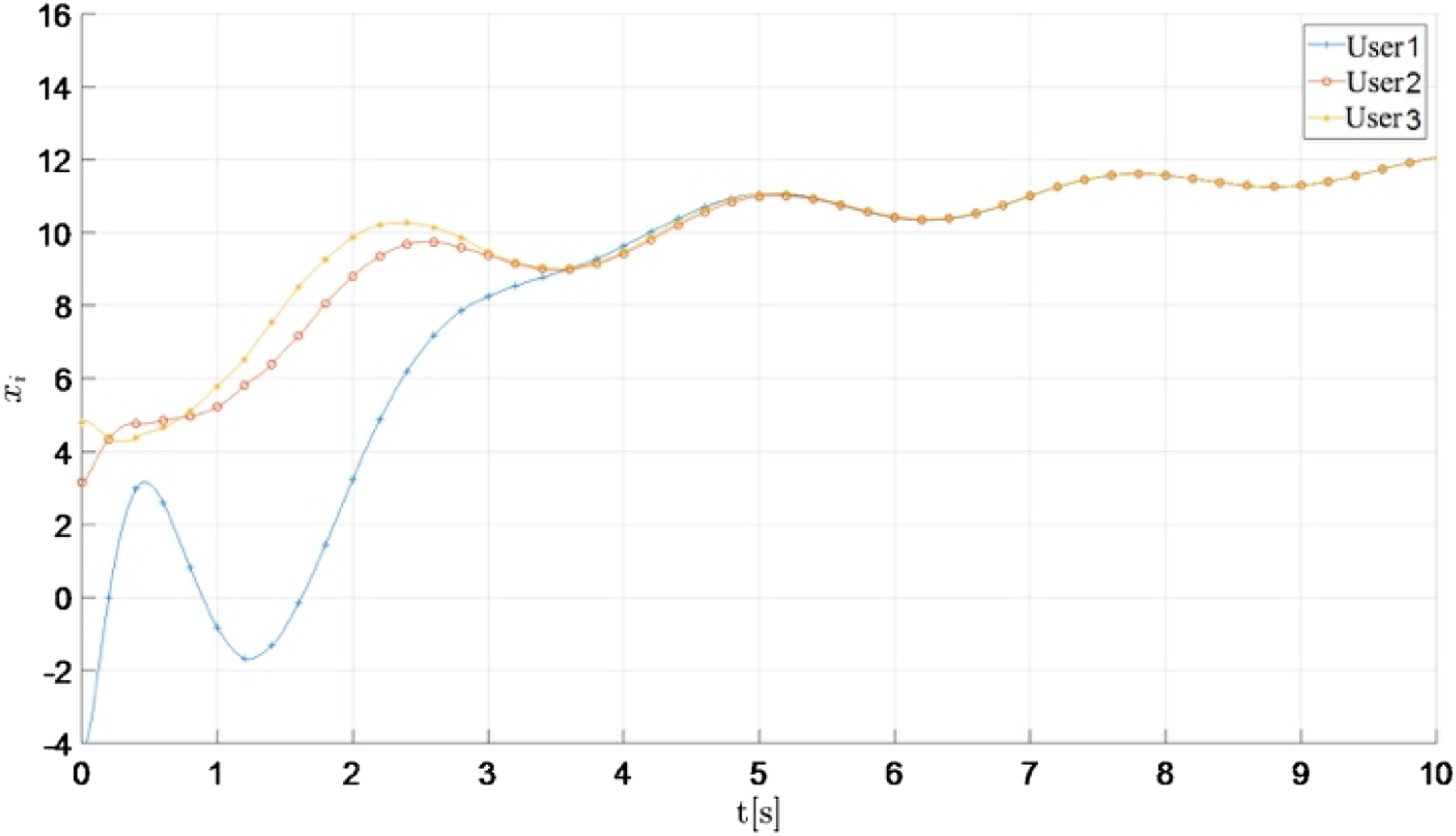
To verify the convergence of the distributed synchronization algorithm in a network consisting of six users, consider the directed graph topology as illustrated in Figure 3. In this configuration, four key nodes 2, 3, 5, and 6 at the center of the network form a peer-to-peer synchronization ring. User 3 synchronizes with User 4 unidirectionally, User 4 synchronizes with User 5 unidirectionally, User 1 synchronizes with User 2 unidirectionally, and User 6 synchronizes with User 1 unidirectionally. The parameters for the system’s nonlinear dynamic equations are specified as equation (45). Synchronization topology model for six users.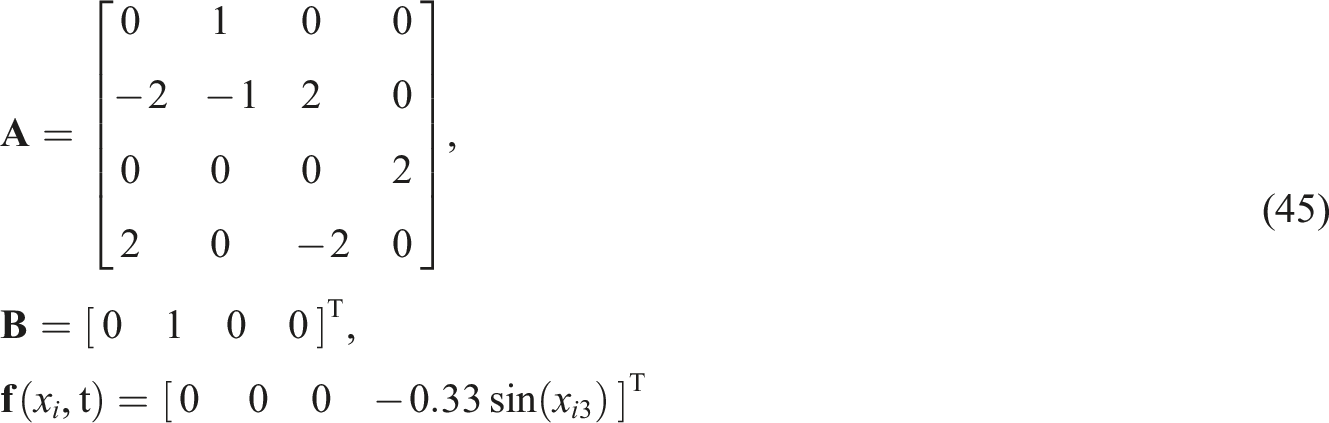

The threshold function is selected as:
Using MATLAB’s CVX toolbox, the calculations yield:
As observed from Figure 4, even when the number of users is doubled and the network links become more complex, the adaptive adjustment scheme still achieves asymptotic synchronization of the user devices’ states within 5 s. The users’ clock states progressively converge and evolve along a common trajectory. This verification indicates that, as the network expands, the proposed distributed synchronization scheme remains effective, demonstrating strong robustness of the algorithm. Synchronization trend curve for six users.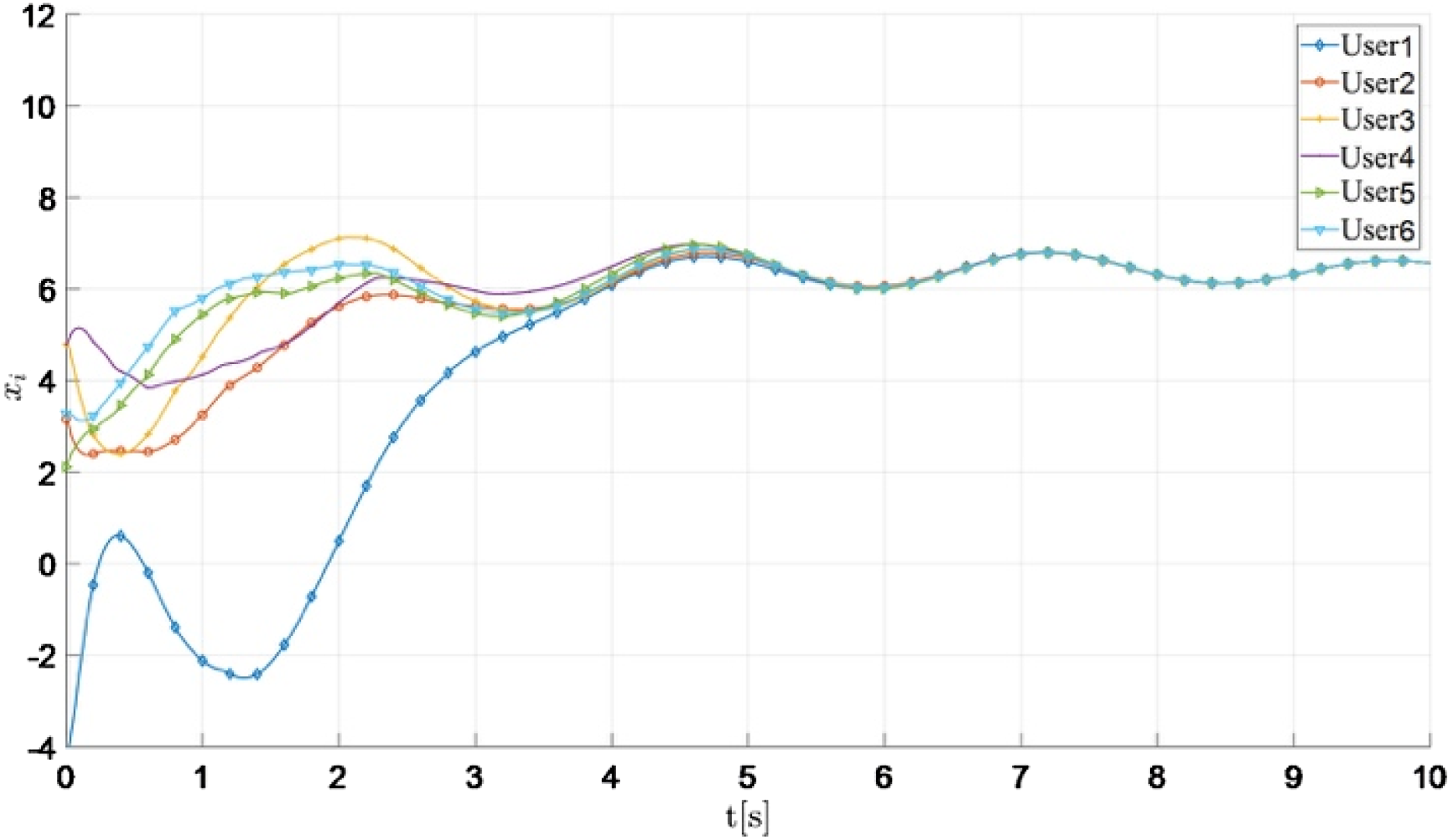
Comparison of synchronization performance
In this section, we compare the performance of the proposed algorithm with existing algorithms based on the six-user topology mentioned earlier. The comparison algorithm for continuous communication is a classic distributed clock synchronization scheme from reference 2, with its input represented by equation (48).
For any user ii in a distributed network, appropriate choices of c and K can solve the synchronization problem of distributed devices. The provided protocol relies on continuous communication between agents, requiring continuous information exchange between nodes to update inputs. Since it is not event-triggered, the limits of this algorithm can serve as an upper bound for the synchronization error of event-triggered schemes, validating whether the synchronization error can asymptotically converge to this upper bound to assess the effectiveness of the distributed synchronization algorithm proposed in this chapter. This algorithm features continuous communication, but the bandwidth of power networks is limited, which may not meet this requirement. Another comparative algorithm is an event-triggered scheme with no node priority, designed based on the event-triggered function from reference 1.
Firstly, the convergence of the event-triggered scheme without node priority is validated. Simulations are conducted in a network scenario with six users, keeping the topology and parameter settings unchanged, and the threshold function is selected as:
As Figure 5 shows, the comparison of synchronization errors for three different communication mechanisms—continuous communication, event-triggered synchronization without node priority, and event-triggered synchronization with node priority is analyzed. It is calculated that the upper bound for synchronization error is 0.2139. By adjusting the lower bound of the threshold function, synchronization error can be made arbitrarily small. Therefore, reducing the triggering threshold function will bring the synchronization error closer to zero. Although the frequency of information exchange between user nodes decreases, the synchronization error approaches that of the comparison algorithm without priority consideration. In this case, the synchronization precision of the node priority scheme is approximately 2.106 ms. Further adjustment of the control parameters can meet the high-precision synchronization requirements of new power applications. Comparison of synchronization error.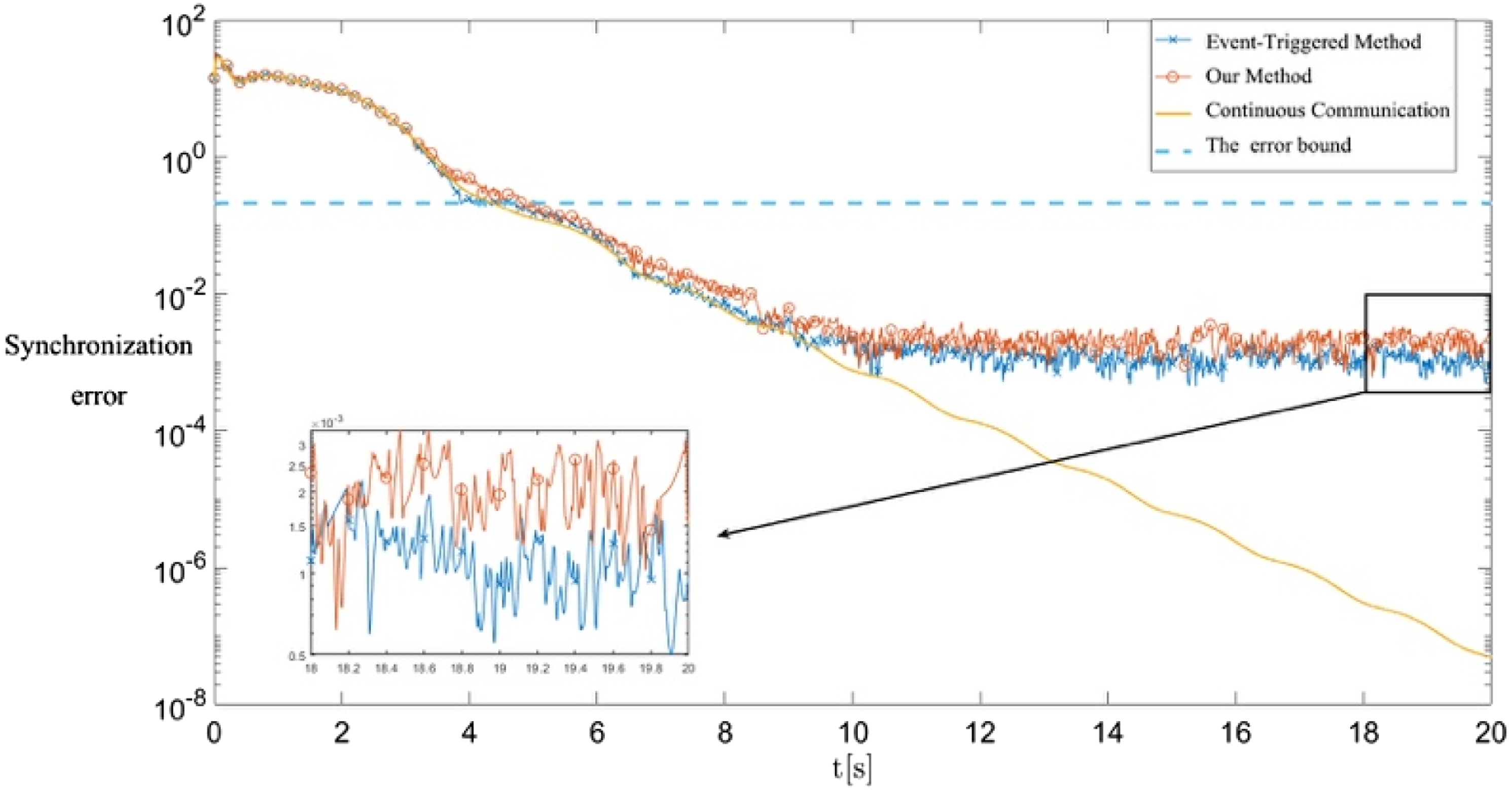
Control parameters calculation algorithm.
Clock synchronization frequency comparison for six users.

Conclusion
This paper proposes a distributed clock synchronization architecture based on an event-triggered mechanism and node priority optimization, which replaces centralized public network timing with direct node-to-node information exchange. This approach establishes a unified time standard while reducing the synchronization burden on critical nodes like CCOs and power grids. User devices achieve millisecond-level precision by adjusting clocks via one-hop neighbor data, with MATLAB simulations validating convergence in three-user and six-user networks—synchronization errors approach the lower bound of continuous communication, and node priority reduces update frequency by 28% for critical nodes, minimizing information exchange. The scheme reduces the information exchange burden on nodes, while ensuring high-precision clock synchronization for local user devices in new power applications.
Footnotes
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.