
Abstract
Lamb wave-based damage identification and localization methods hold the potential for nondestructive evaluation and structural health monitoring. Dispersive and multimodal characteristics lead to complicated Lamb wave signals that are challenging to be analyzed. Deep learning architectures could identify damage-related features effectively. Convolutional neural network (CNN) is a promising architecture that has been widely applied in recent years. However, this data-driven approach still lacks a certain degree of physical interpretability and requires a large number of parameters. In this article, an interpretable Lamb wave convolutional sparse coding (LW-CSC) method is proposed for structural damage identification and localization. First, toneburst signals at different center frequencies are considered in the first convolutional layer. The network convolves the waveforms with a set of parametrized functions that implement band-pass filters, which performs more physical interpretability compared to conventional CNN model. Subsequently, the damage features are extracted according to the multi-layer iterative soft thresholding algorithm for multi-layer CSC model, which could realize a deeper network without adding parameters unlike CNN. Finally, Lamb wave-based damage localization is visualized using an imaging algorithm. The experimental results demonstrate that the proposed method not only enables improvement of the classification accuracy but also achieves structural damage localization accurately.
Keywords
Introduction
Nondestructive evaluation (NDE) and structural health monitoring (SHM) are critical to ensure the safety and long-term performance of various modern engineering structures. 1 It is of utmost importance to detect and locate structural damage early to evaluate structural condition and provide timely maintenance. A large number of techniques have been developed to achieve structural damage inspection and further localization.2,3
Ultrasonic Lamb wave is a promising tool for NDE and SHM since it can propagate over long distances with high sensitivity to small damages in the early stage of growth. 4 A damage localization system normally consists of a network of piezoelectric transducers attached on the surface of a plate-like structure to excite and record Lamb waves. 5 When damages exist in the structure, the recorded signal in time domain can be expressed as a linear combination of direct, boundary-reflection, damage-reflection waves and noise. 6 In order to locate the damage, an important task is to extract damage-related features (i.e., damage index, DI) from the complicated captured signals. 7 Efficient DIs, such as time-of-flight (TOF),8,9 correlation coefficients, 10 and energy ratio, 11 can serve as indicators to depict the damage. Generally, these features are extracted by using time-domain methods, frequency domain methods, and time–frequency domain methods according to engineering experience and professional knowledge. However, dispersive and multimodal characteristics of Lamb waves often result in the complex overlap of waveforms, which makes it challenging to extract suitable features manually.
To relieve the burden of feature selection, many deep learning approaches have been developed to achieve automatic damage feature extraction. Deep learning algorithms are capable of extracting relevant features from data at different abstract levels, which is sufficient for damage detection. Typically, Munir et al. 12 utilized autoencoder to realize noise depression from the ultrasonic damage signals of weldment, which successfully improve the damage classification accuracy. Song et al. 13 combined two distinct fully convolutional networks to achieve subwavelength defects visualization in plate-like structures. Sun et al. 14 studied the dense network, convolutional neural network (CNN), recurrent neural network, and their proposed deep GFresNet to analyze the defect classification performance of each structure. Bastian et al. 15 applied a custom-designed CNN to classify the images of pipelines based on their corrosion level. Meng et al. 16 used CNN to realize classification of ultrasonic signals for the carbon fiber–reinforced polymer specimens with different types of damage. Liu et al. 17 investigated a CNN-based crack damage detection method using Lamb wave signals for plate structures. Zhang et al. 18 applied 1-D CNN to extract the time-varying DI features from original Lamb wave signals, which allows accurate localization of damages in plates with few transducers. Clearly, CNN is considered as a promising method in recent years. However, acquiring the training data is one of the challenges for SHM. It is time-consuming to collect sufficient data from the specimens containing kinds of damages. Finite element-based simulations have been used to augment the training dataset.19-21 The match between simulations and experiments must be sufficient. In addition, a well-behaved deep CNN model often requires appropriate layers with a large number of parameters for solving a complex problem, which might increase computational costs of network training.
In Lamb wave detection, dispersive characteristic increases the signal duration and decreases the amplitude, while multiple modes generally exist in the waveforms. Interaction between structural damages and propagating waves of multiple modes might result in the severe overlap of wave packets. Due to this phenomenon, the damage features are generally drowned in wave components in time domain, making the signals difficult to interpret. Besides, the structure is mostly damage-free. 22 Under the sparsity assumption, only a few waves in the recorded signals contain the effective damage information. It is challenging to extract sparse damage features from such complicated Lamb wave signals. Therefore, inspired by sparse coding theory,23,24 convolutional sparse coding (CSC) model and its multilayered version are employed in this article for Lamb wave damage identification and localization. This approach allows the flexibility to increase the depth of the network without adding parameters unlike conventional CNN, which improves the performance and makes it easier to extract weak damage features in Lamb wave signals. In addition, the models still lack physical interpretability in the application of Lamb wave localization. These systems could discover internal representations that are difficult to interpret. 25 In this article, we propose an interpretable Lamb wave convolutional sparse coding (LW-CSC) method for structural damage identification and localization. The first convolutional layer is enhanced with toneburst signals to perform more physical interpretability. The damage features are extracted according to multi-layer iterative soft thresholding algorithm (ML-ISTA) for multi-layer CSC model. Lamb wave-based damage identification and localization are then achieved using an imaging algorithm.
The organization of this article is as follows. In the section A brief review of CNN, theory of CNN is briefly reviewed. In the section Interpretable Lamb wave convolutional sparse coding method for damage identification and localization, the interpretable LW-CSC method for structural damage identification and localization is described in detail. In the section Experimental evaluation, experimental results are presented to verify the effectiveness of the proposed method. Further discussions are given in the Discussions section. In the Conclusions section, several conclusions are summarized.
A brief review of CNN
Convolutional neural network has received important attention in recent years, since there are four key ideas that take advantage of the properties of initial signals: local connections, shared weights, pooling, and the use of many layers. 26
The basic structure of CNN is composed of input layer, convolutional layer, pooling layer, full connected layer, and softmax layer. Convolutional layers are used to automatically extract features from the input signal

In matrix-vector form, the relation between input and output for a two-layer forward pass of CNN can be written as follows
27

Interpretable Lamb wave convolutional sparse coding method for damage identification and localization
In this section, the proposed interpretable LW-CSC method for structural damage identification and localization is described. Lamb wave signals are input, and the first convolutional layer is enhanced with toneburst kernels at different center frequencies, which increases the interpretability compared with traditional CNN. Subsequently, the damage features are identified employing ML-ISTA for multi-layer CSC model. This approach utilizes unfoldings to increase the depth of the network without considering additional parameters unlike conventional CNN. Lamb wave-based damage identification and localization are then achieved by using an imaging algorithm. The overview of the proposed approach is shown in Figure 1. The overview of the proposed interpretable Lamb wave convolutional sparse coding method for structural damage identification and localization.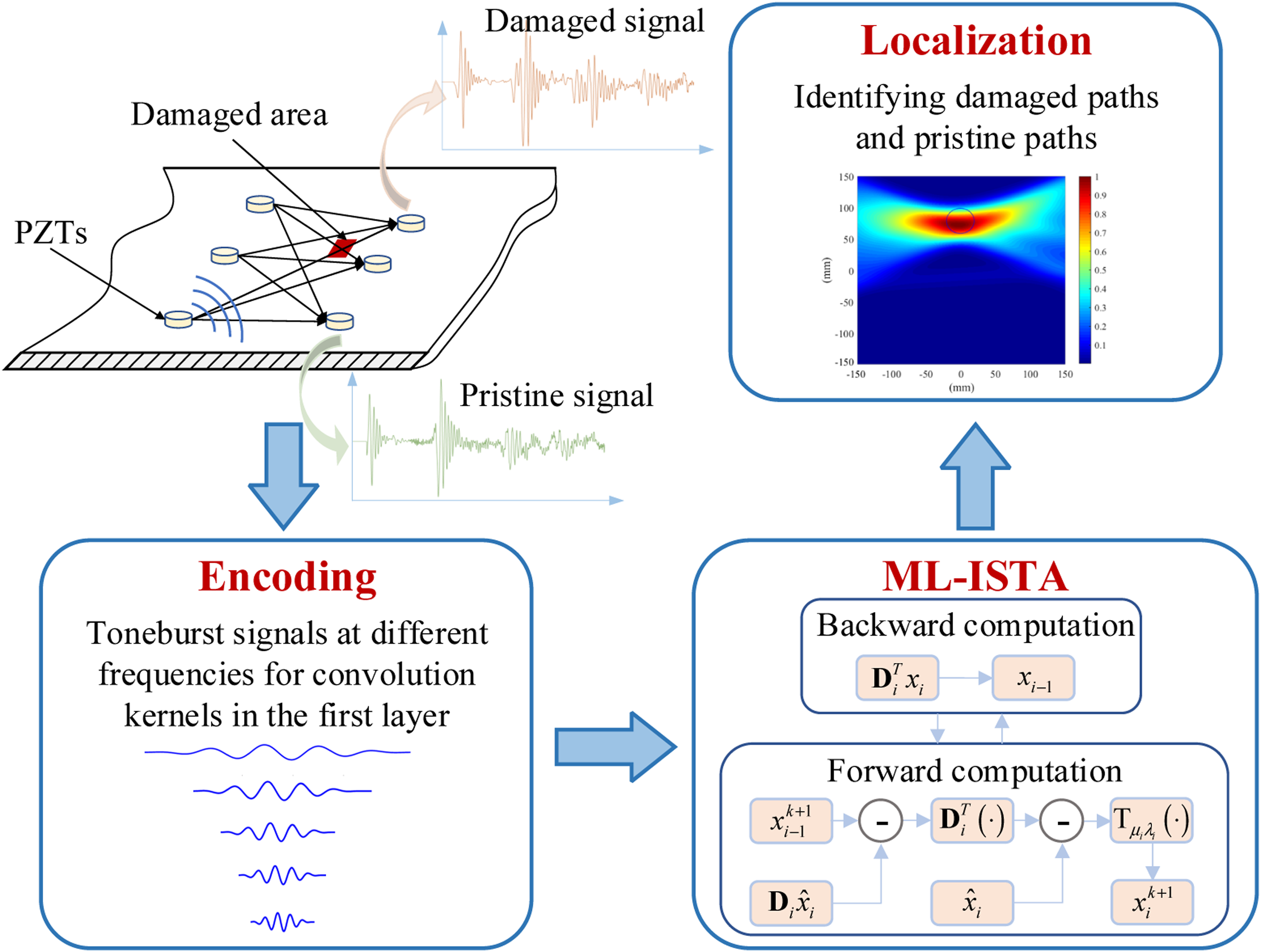
Lamb wave propagation
Lamb waves exist in plate-like structures, guided by the free upper and lower surfaces. Infinite symmetric and antisymmetric Lamb wave modes are available, denoted by S
n
and A
n
, where n is the order of the mode.
7
The propagation characteristics indicated by phase (c
p
) and group (c
g
) velocities vary with frequency, structural geometry, and entry angle. Without considering the attenuation in the propagation process, the measured Lamb wave response r(t) after traveling distance d can be represented as
22

A normal configuration for Lamb wave inspection is a spatially distributed array of piezoelectric devices to excite and record signals. Especially common in damage detection is the application of residual signal, which is calculated by subtracting the reference signal from the signal acquired in the damaged structure. The propagating Lamb wave after passing through the damage will experience attenuation, reflection, and mode conversion. Reflections from damage are often orders of magnitude weaker than the incident waves. In this case, due to factors such as operational and environmental conditions, the residual signal obtained by subtraction often shows errors. Weak damage information might disappear because of the phase error. Not to mention that it is not always possible to obtain a reference signal every time; thus, the damaged signals are used as input directly in this article. In practice, several damage detecting methods exploit the assumption of structural damage sparsity, that is, the structure is mostly damage-free. 22 Under this assumption of sparsity, the recorded signals can be expressed with a relatively small number of non-zero coefficients containing damage information. Xu et al. 28 proposed a weighted sparse reconstruction-based anomaly imaging method for plate-like structures with better imaging performance. Wu et al. 29 utilized a robust sparse Bayesian learning algorithm employing Gabor pulse model to achieve damage localization. Wang et al. 30 designed a comprehensive dictionary containing various waveforms so that the received waveform can be decomposed into a spatial domain for damage location. Therefore, we present a multi-layer convolutional sparse coding framework for Lamb wave damage identification and localization in the following section.
Lamb wave convolution kernels
Generally, the CNN kernels are not physically understandable by humans and commonly contain undesirable noisy information. The internal “black-box” representations automatically learned by conventional neural architectures often suffer from a lack of interpretability, which raises the attention on adversarial robustness of CNNs. 31 Such a lack of interpretability could be a bottleneck for the development of future deep learning approaches. Introducing more meaningful features to the network can lead to a more understandable and credible model. In order to overcome this drawback, Miorelli et al. 19 proposed the ShmGwi-InvNet exploiting a CNN architecture to invert damage size and location. Visualizing the shallowest and deepest layers feature maps reflects some degrees of interpretability. Since the defect position is easily identified in some neurons, the feature extraction mechanism of the model can be underlined. Ma et al. 32 replaced the kernel in the first convolutional layer of conventional CNN with trainable predefined image filters, which connecting the model and domain knowledge of specific tasks. Yang et al. 33 optimized convolution kernel and applied the constraint rule of entropy similarity to achieve classification of pipeline magnetic leakage images. Ravanelli and Bengio 25 proposed the SincNet that encourages the first layer to discover more meaningful kernels by exploiting parametrized Sinc functions, aiming to implement interpretable CNN for a speech recognition task. The deep-SincNet is then introduced to achieve robust interpretable deep learning for intelligent fault diagnosis of induction motors. Liao et al. 34 utilized a convolutional layer with the multimode Lamb wave source pulses as the convolution kernels to reconstruct the measured signal.
Clearly, the kernels learned by the first convolutional layer play an important role in the model. To help the model discover more meaningful kernels for Lamb wave detection, in this article, toneburst signals at different center frequencies are utilized in the first convolutional layer. An n cycle Hanning windowed sinusoid toneburst with the center frequency f
c
satisfies

In Lamb wave-based SHM system, toneburst signals are widely applied as the excitation aims to obtain a wave packet with a short duration. When the frequency range of excitation signal is relatively narrow, the waveforms of received signal reflected from the damage can be described as the combination of time-delayed and amplitude-scaled toneburst signals. Toneburst could match partial wave components effectively. In this case, toneburst-based dictionary atoms are designed for sparse representation.23,35,36 The convolution kernel in the first convolutional layer is similar to the dictionary in sparse representation theoretically. Therefore, in this article, the first convolutional layer is enhanced with these toneburst signals, which makes the model discover features of Lamb waves in the frequency range of interest. For the toneburst with the given center frequency, the greater the number of cycles of Hanning windowed modulation, the narrower the frequency band. The energy is concentrated in a relatively narrow frequency range. Hence, the number of cycles is set to five here. Tonebust signals and corresponding frequency spectrums are shown in Figure 2. The network convolves the waveforms with a set of parametrized functions that implement band-pass filters, and each parameter has a clear physical meaning. Afterward, conventional CNN-based architecture such as activation function and softmax classification can follow the first convolutional layer. Examples of 5-cycle toneburst signals at different center frequencies and corresponding frequency spectrums: 150 kHz, 300 kHz, 450 kHz, 600 kHz, 800 kHz.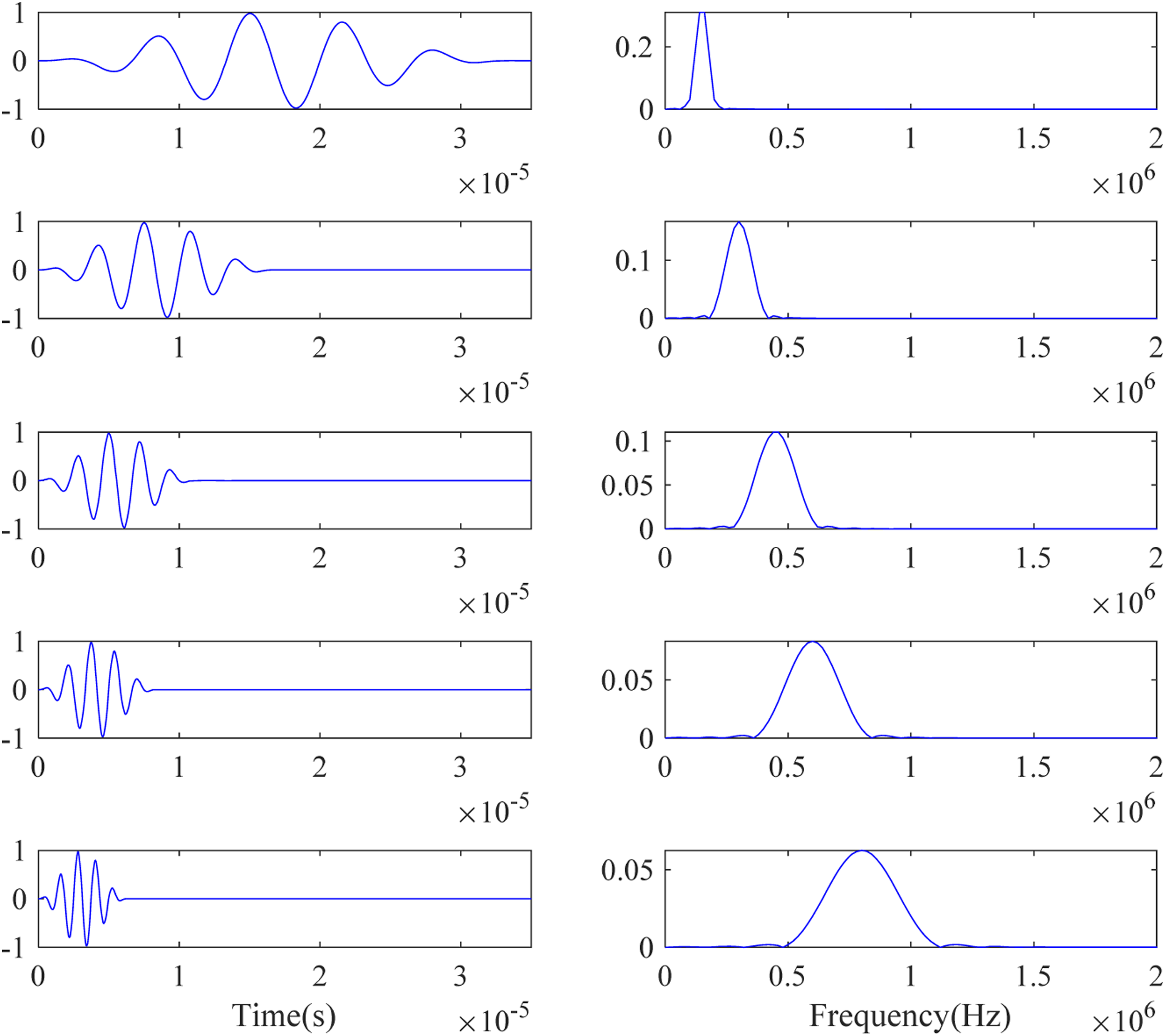
Multi-layer basis pursuit algorithm for interpretable LW-CSC
A well-behaved model of deep learning often depends on the quantity and quality of the training data. If the dataset is not appropriate, the performance of networks might degrade severely. This overfitting problem is because of the employment of networks that are associated with a huge number of parameters. 37 Therefore, the interpretable LW-CSC is employed for damage localization. The network can become deep without introducing extra parameters so as to mitigate the overfitting problem. Convolutional sparse coding has been extended to express CNN model theoretically. In multi-layer CSC model, the layered-thresholding algorithm for decomposing input signal is completely equivalent to the forward pass in CNNs. 27 Traditional basis pursuit is generalized to this multi-layer setting, which also means that CNN is interpreted as an approximation of multi-layer basis pursuit problem. 38
A given Lamb wave signal

This basis pursuit model is expanded to multi-layer settings, where the signal is given as


Actually, if λ1 = 0 and λ2 > 0, the above formulation is equivalent to conventional basis pursuit problem. From an optimization perspective, the above objective function of multi-layer basis pursuit can be represented as
38

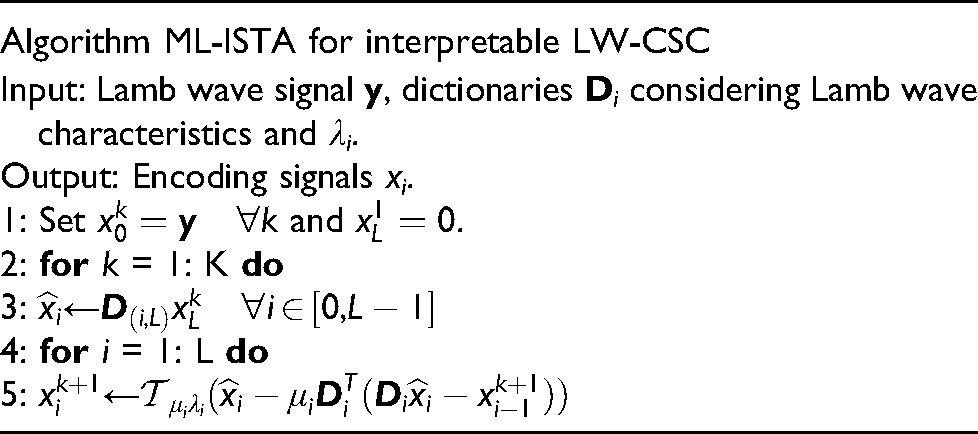
In this article, ML-ISTA is employed on multi-layer basis pursuit problem to identify Lamb wave damage features flexibly. The idea of ISTA is to iterate the updates given by the proximal operator of g (.). When


Due to the approximation, the proximal mapping of g turns to be the soft-thresholding operator with parameter λ, that is,

Assuming


Experimental evaluation
Experimental setup
A schematic diagram of the experimental specimen for damage identification and localization is shown in Figure 3. The test specimen is an aluminum plate with the dimensions of 500 mm × 500 mm × 1.8 mm. Set the center point and two vertical boundaries of the specimen as the coordinate origin and axes, respectively. By grinding 0.05 mm on the surface of the sample, a circular corrosion damage with a diameter of 40 mm is created. The center of the damage is located at (0 mm, 80 mm), as shown in Figure 3. Lamb wave signal generation is achieved with an Innolas Spitlight 600-10Nd: yttrium aluminium garnet material (YAG) laser, and the broadband response is recorded by an Olympus C133-RM ultrasonic probe. A Tektronix DPO-5054B oscilloscope is then used to acquire received signals at a sampling frequency of 20 MHz. Schematic diagram of the experimental specimen (unit: mm).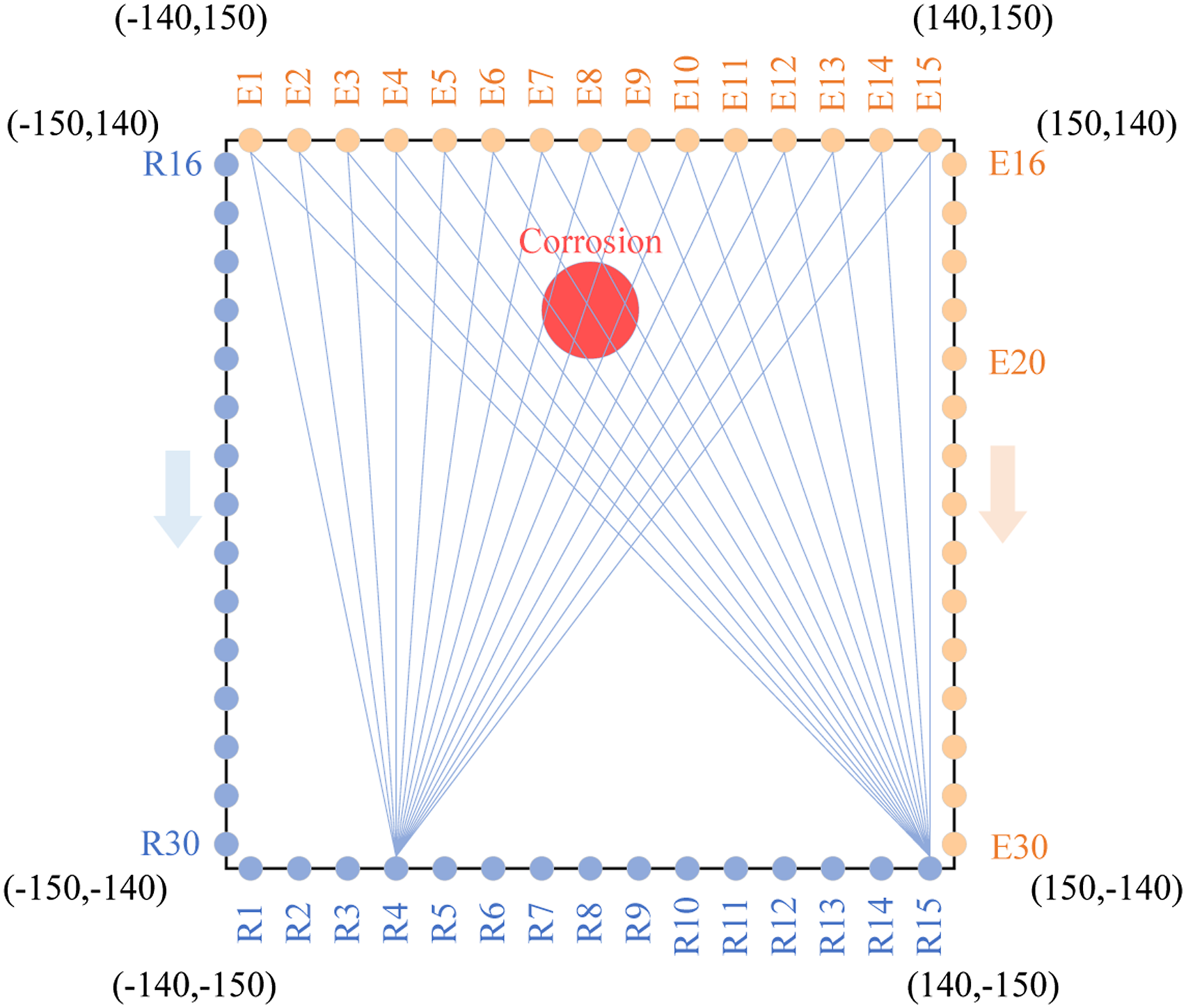
The receiving probe moves from R1 to R15, and the laser device scans from E1 to E15, thus constituting 225 transmitter–receiver pairs. By this means, a pitch-catch configuration is formed covering the detection area. Signals passing through the corrosion area contain the information of damage features, which can be distinguished from the signals of the pristine paths. These signals are then preprocessed and fed into the network as the training dataset, derived from 182 pristine paths and 43 damaged paths. Similarly, the other 225 signals collected by excitation E16-30 and reception R16-30 are used after preprocessing as the testing dataset corresponding to 190 pristine paths and 35 damaged paths, aiming to validate the effectiveness of the method. Each signal has a length of 1500 points. A photograph of the experimental procedure is illustrated in Figure 4. Experimental setup for damage identification and localization.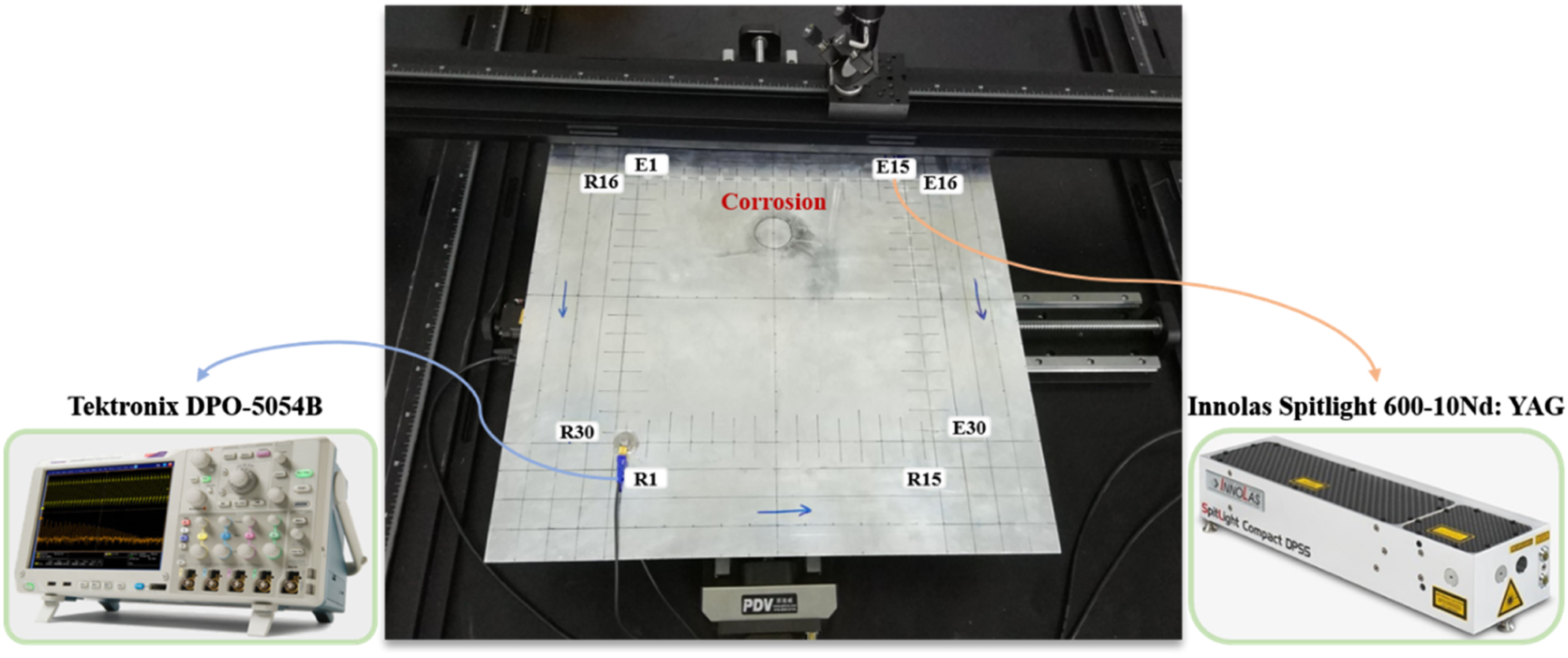
Results
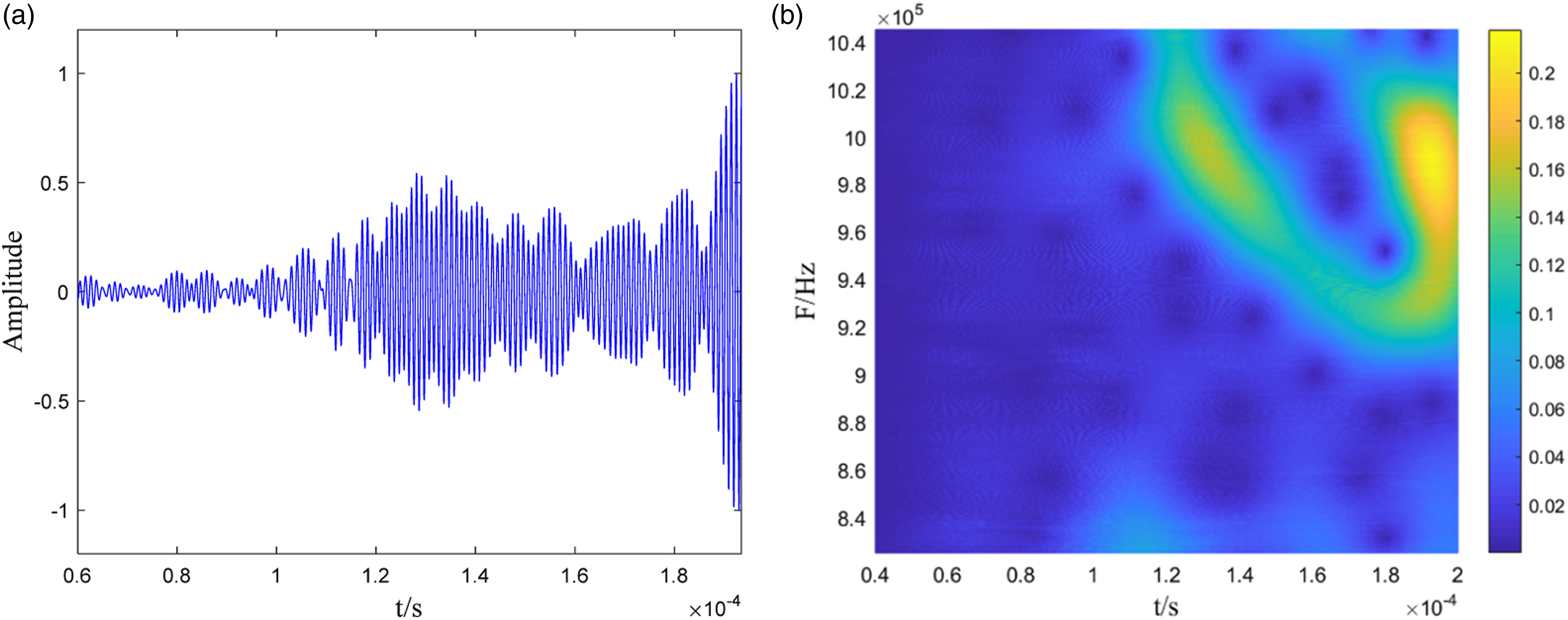
As mentioned above, 450 Lamb wave signals are acquired through the experiment. The recorded signal from path E1-R15 is illustrated in Figure 5. According to the continuous wavelet transform (CWT) of the signal, it can be seen that several modes exist simultaneously due to the large frequency range including S0, A0, and A1 mode. The aliasing of multimodal waveforms might increase the difficulty of extracting features. Anti-symmetric modes of Lamb waves are often more sensitive to detecting thickness varying damage compared with symmetric modes. The components of A1 mode can be purely extracted from the original broadband Lamb wave signals as shown in Figure 5(b). Therefore, A1 mode is employed by selecting the frequency range from 825 kHz to 1045 kHz. The normalized time-domain signal of A1 mode after selection is shown in Figure 5(c). In this article, time-domain signals of A1 mode are input to the network. These data can be manually labeled by judging whether their paths pass through the corrosion area. Figure 6 shows the A1 mode time-domain signal and its time–frequency spectrum from damaged path E7-R15. As can be seen, the distribution of energy of damaged path is clearly different from that of pristine paths due to the Lamb wave scattering at damage position. Example of the recorded signal from pristine path E1-R15. (a) Time-domain signal. (b) Continuous wavelet transform spectrograms of all modes and A1 mode. (c) Time-domain signal of A1 mode. Example of the A1 mode signal from damaged path E7-R15. (a) Time-domain signal. (b) Corresponding continuous wavelet transform spectrogram.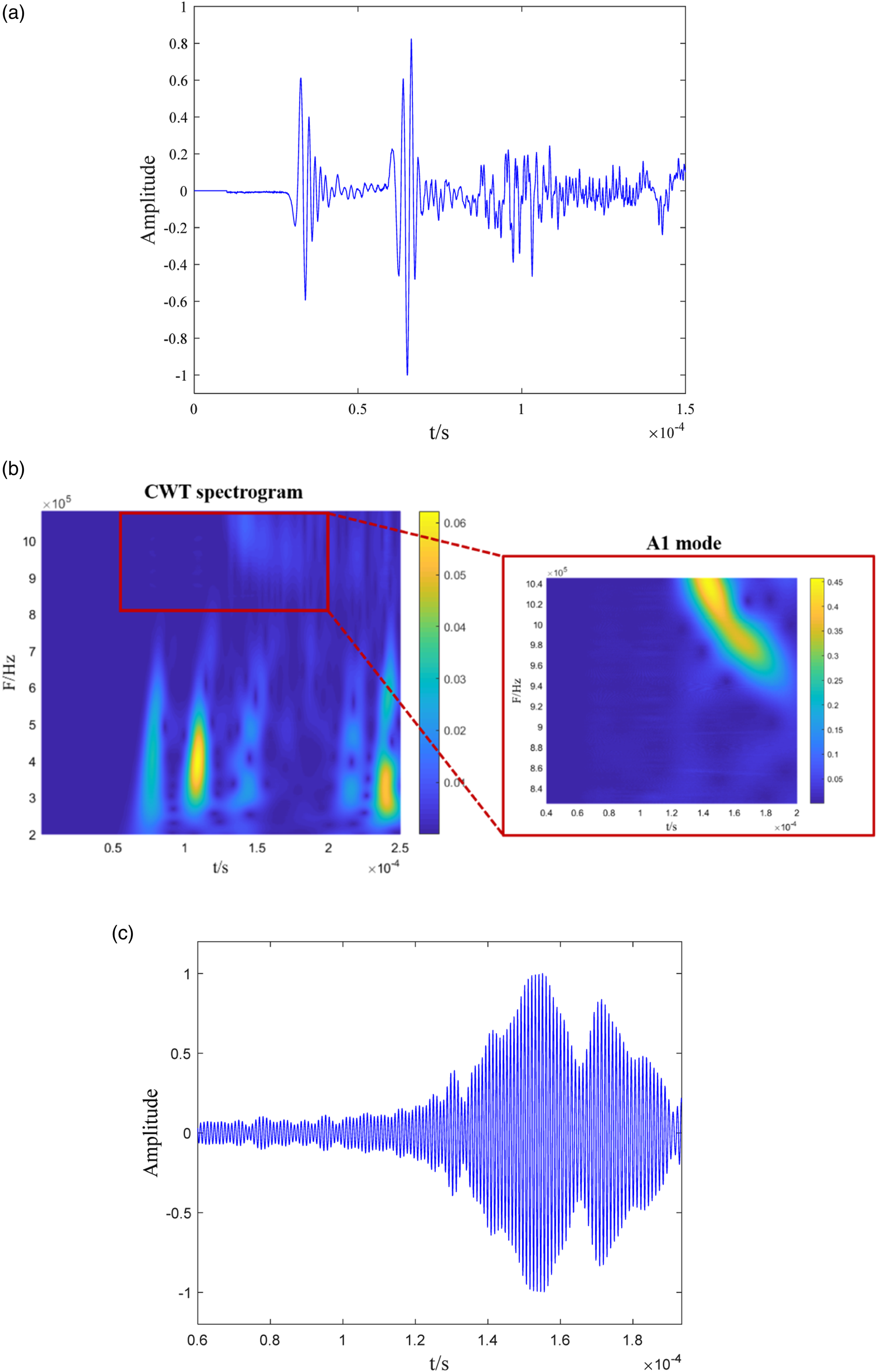
The model for interpretable LW-CSC method is composed of a toneburst-convolutional layer, two normal convolutional layers, and a fully connected layer with softmax. The kernel sizes of three convolutional layers (i.e., dictionaries) are 1 × 110, 1 × 8 and 1 × 4, respectively, and the stride is two in the first two layers. The center frequency of toneburst in the first convolutional layer ranges from 920 kHz to 1040 kHz, and the step size is 2 kHz, which basically covers the frequency range of A1 mode. The number of kernels is 61, 16 and 16 for layer one, two and three respectively. Weights of the last two layers are initialized with Xavier initialization. 40 The training and testing are carried out on Google Colaboratory. Training is performed by stochastic gradient descent with momentum 0.9 and weight decay 10−4 in PyTorch implementation. The learning rate is initially set to 10−5, and the batch size is 3. These parameters have been experimented on this dataset to obtain the optimal performance. All these parameters and settings keep the same for subsequent analysis of comparison with standard CNN model.
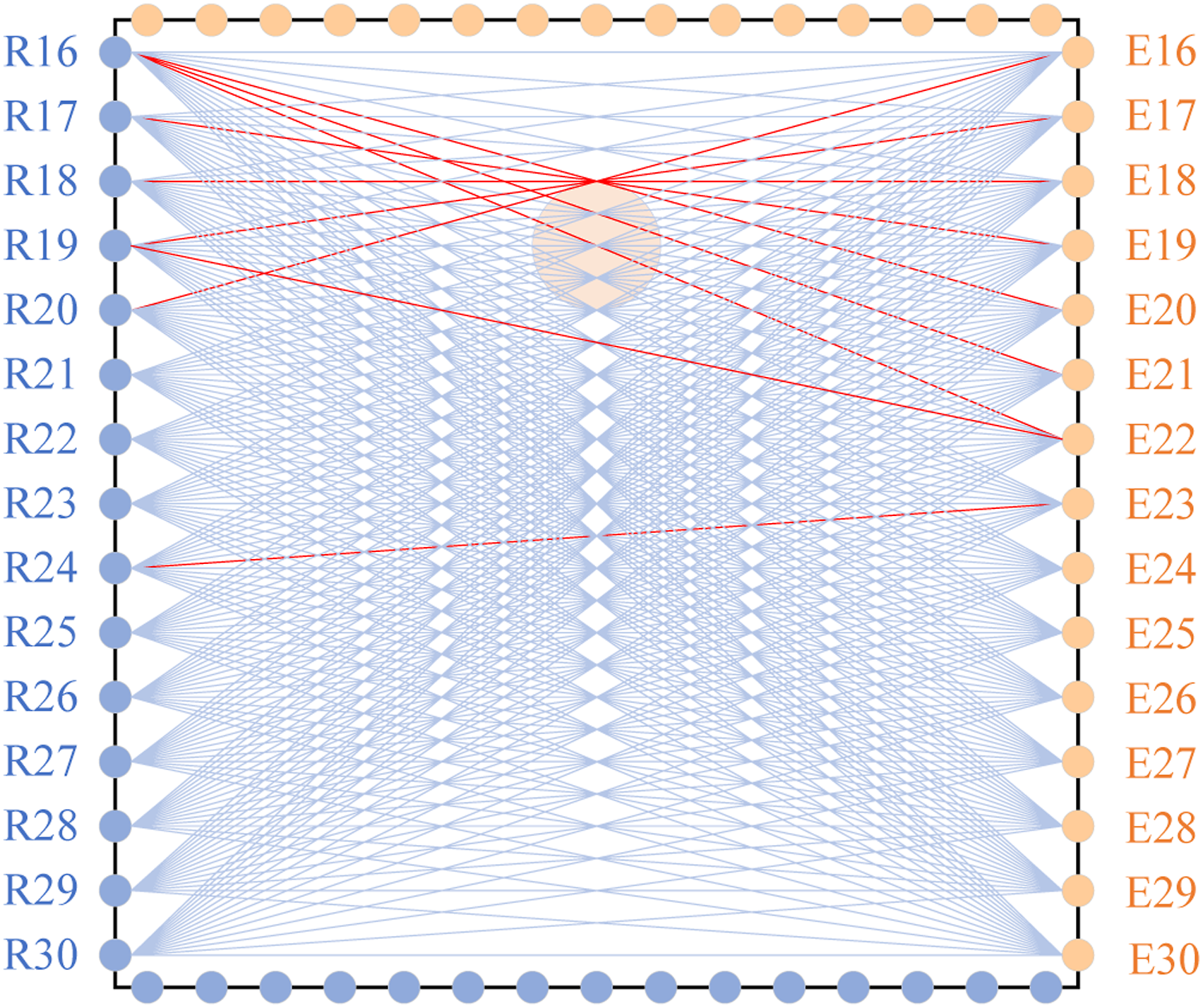
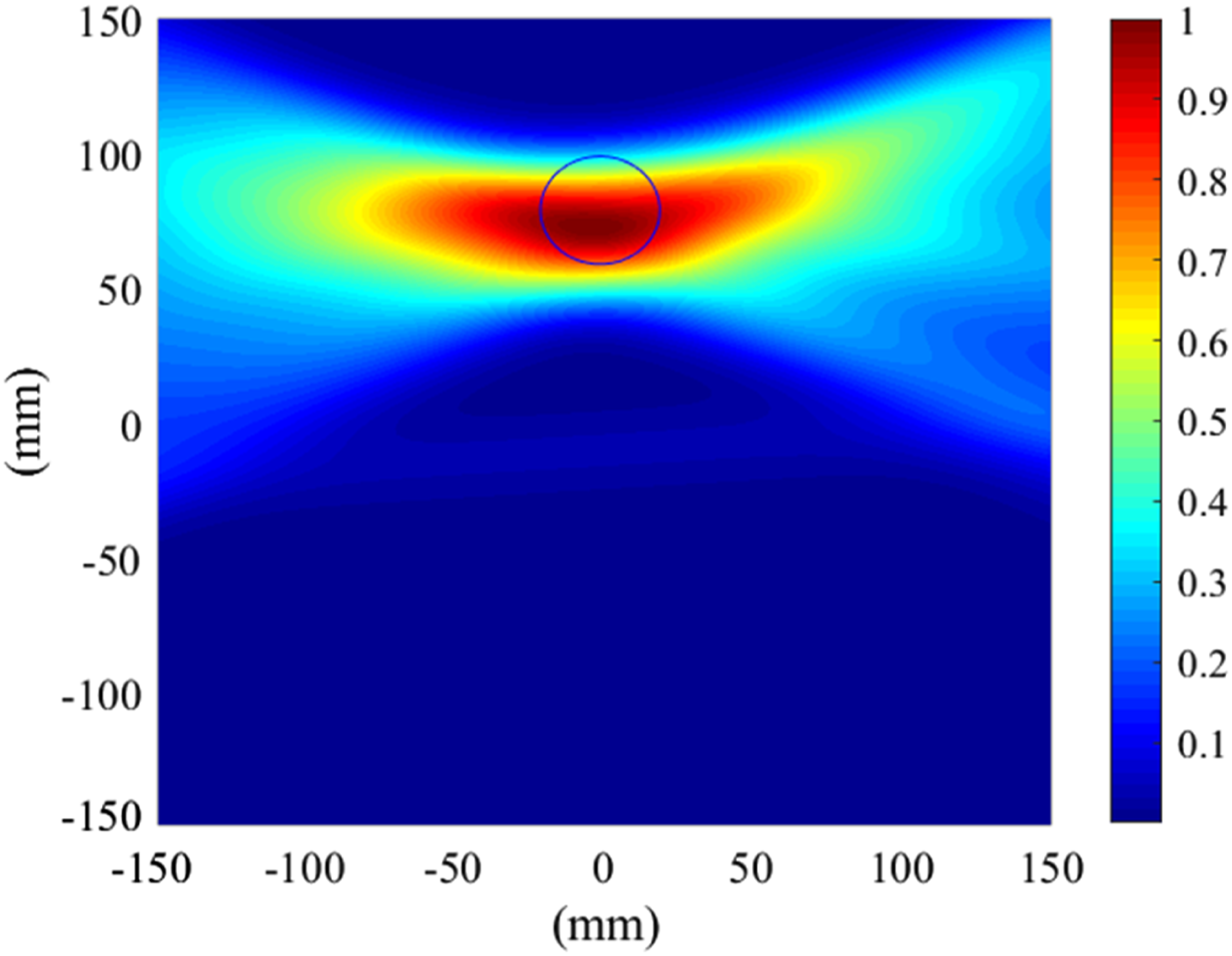
The results of classifying whether the paths pass through the corrosion area are obtained by ML-ISTA algorithm with one unfolding. In Figure 7, paths that have been classified correctly are indicated by blue lines and wrong ones by red lines. Statistically, the overall accuracy of the proposed method for damage identification is 95.56%. Of the 225 signals in testing dataset, 215 signals are correctly classified. 187 of the 190 pristine paths and 28 of the 35 damaged paths are recognized accurately. In order to obtain a more intuitive illustration, the imaging algorithm is applied to calculate the probability of damage to each point of the structure. Pixel value at a particular location (x, y) can be calculated as Classification result of testing dataset using the proposed method. Identification imaging result of corrosion area.
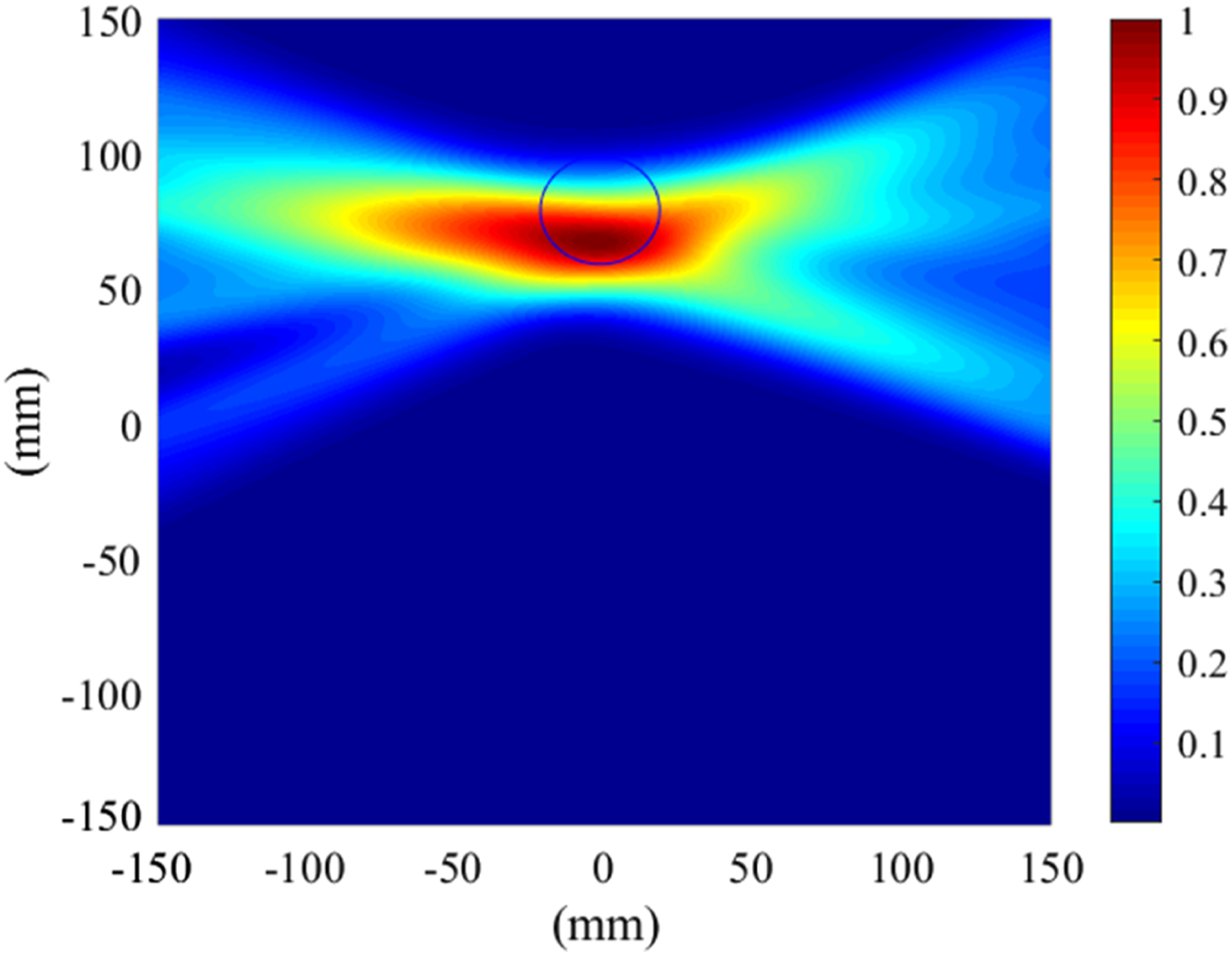
A conventional three-layer CNN model is utilized here to compare with the proposed interpretable LW-CSC method. As mentioned before, the case of 0 unfolding corresponds to the standard CNN. The kernel sizes of three convolutional layers are 1 × 8, 1 × 5, and 1 × 4, with the number of kernels of 8, 16, and 16, respectively. Other settings keep the same as our method for clear comparison. The accuracy of final results is 92.44%. The classification and imaging results are shown in Figures 9 and 10. It can be seen that both two methods have poorer recognition effects on the upper area of the damage, which might be due to a little error in the actual setting of the damage. Compared with CNN, our method can better identify the paths through the corrosion area. Consequently, the above results illustrate that the proposed interpretable LW-CSC method outperforms conventional CNN with the same number of parameters, so as to achieve Lamb wave structural damage localization more accurately. Classification result using conventional convolutional neural network (unfolding is 0). Identification imaging result using conventional convolutional neural network.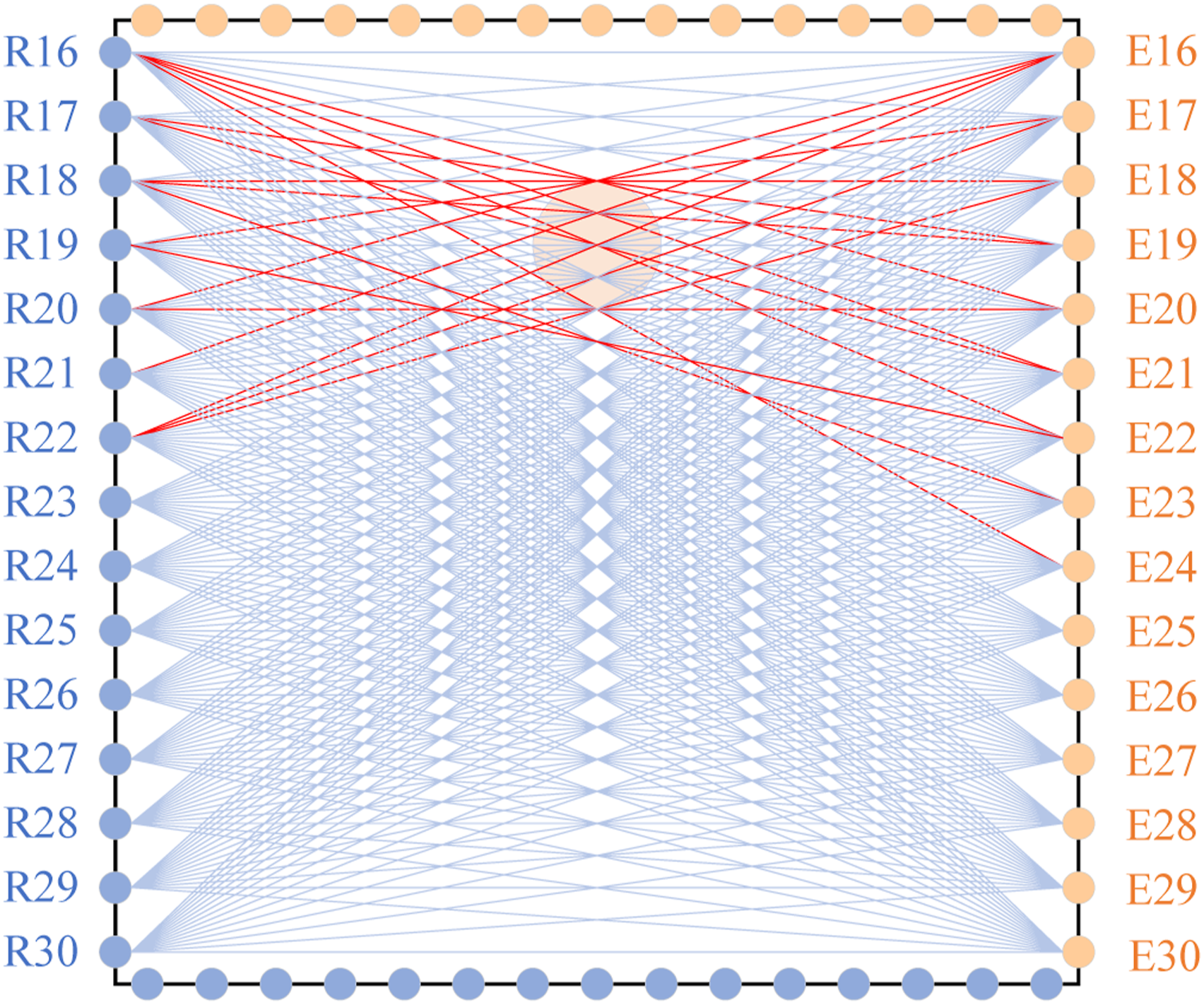
Discussions
Results without considering toneburst
In order to verify that the setting of kernels in the first convolutional layer works here, a model without considering toneburst is employed. That is to say, the sizes and number of the kernels in convolutional layers are still the same as the proposed method. The difference is that dictionaries are all initialized with Xavier method.
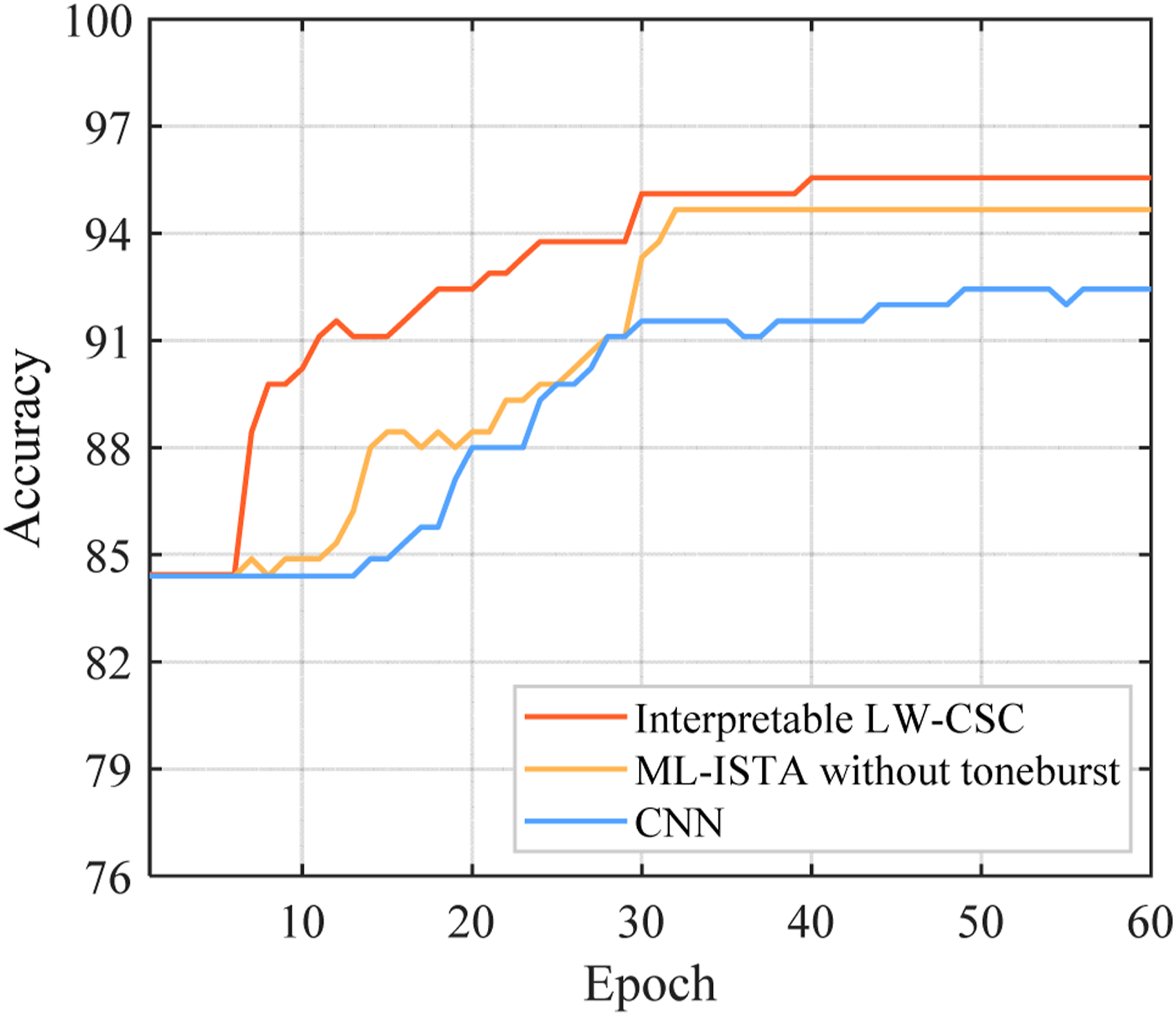
The classification result using ML-ISTA without toneburst are given in Figure 11, and the accuracy of testing dataset is 94.67%. Testing accuracies of the iterations for interpretable LW-CSC, normal ML-ISTA and CNN are depicted in Figure 12. It can be seen that the proposed interpretable LW-CSC method provides the best performance in terms of Lamb wave-based damage identification and localization, which shows the highest precision and fast convergence. Since the proposed architecture convolves the waveforms with kernels that implement band-pass filters, it can better extract damage features in the frequency band of the A1 mode, so as to have physical meaning. Compared with the proposed approach, the accuracy of ML-ISTA without considering toneburst becomes lower, and the convergence speed decreases. However, its accuracy is still higher than that of CNN, indicating that ML-ISTA can improve the classification results effectively. This will be shown in detail in the next section. Classification result using multi-layer iterative soft thresholding algorithm without toneburst. Testing accuracies for interpretable LW-CSC, normal ML-ISTA and CNN. Note: LW-CSC: Lamb wave convolutional sparse coding; ML-ISTA: multi-layer iterative soft thresholding algorithm; CNN: convolutional neural network.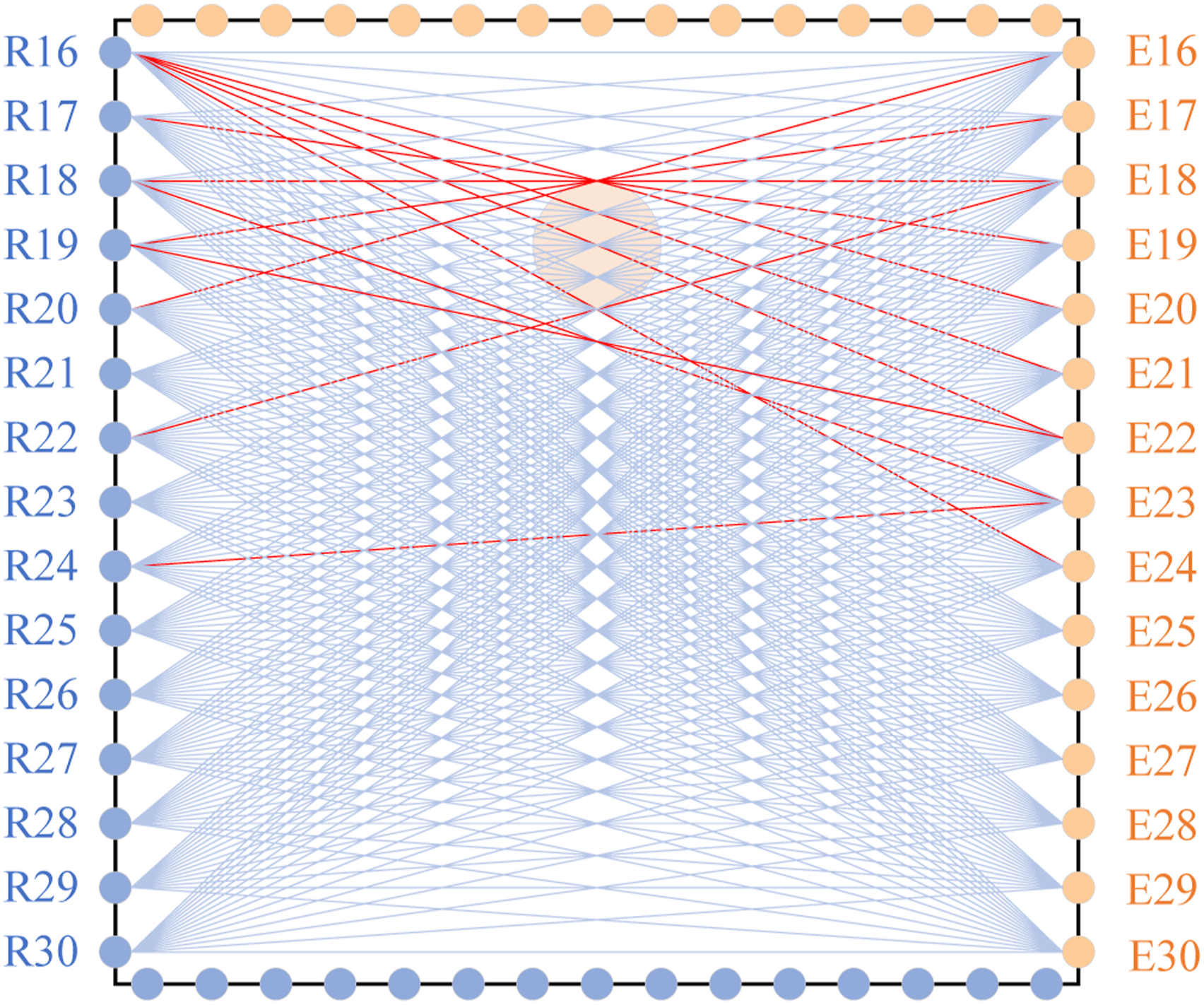
Results with 2D input
The damage features are extracted by employing ML-ISTA, which can extend the depth of network without considering additional parameters as conventional CNN. In such a case, the testing accuracies increase, and the classification results are improved to achieve better damage localization. In the above examples, one-dimensional (1D) time-domain signals are applied as the dataset. Here, two-dimensional (2D) data is utilized as the input dataset to demonstrate the effectiveness of ML-ISTA compared to standard CNN.
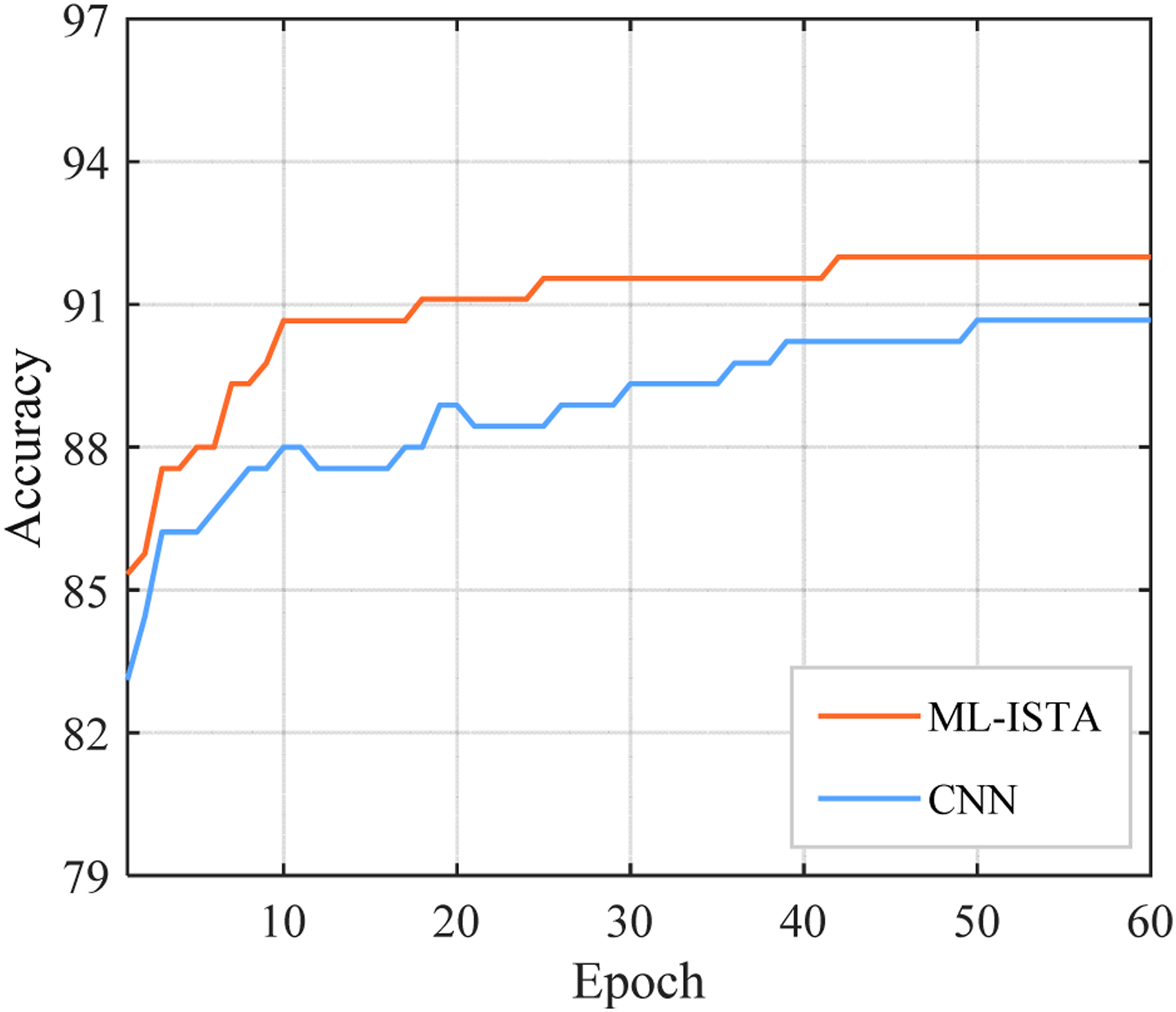
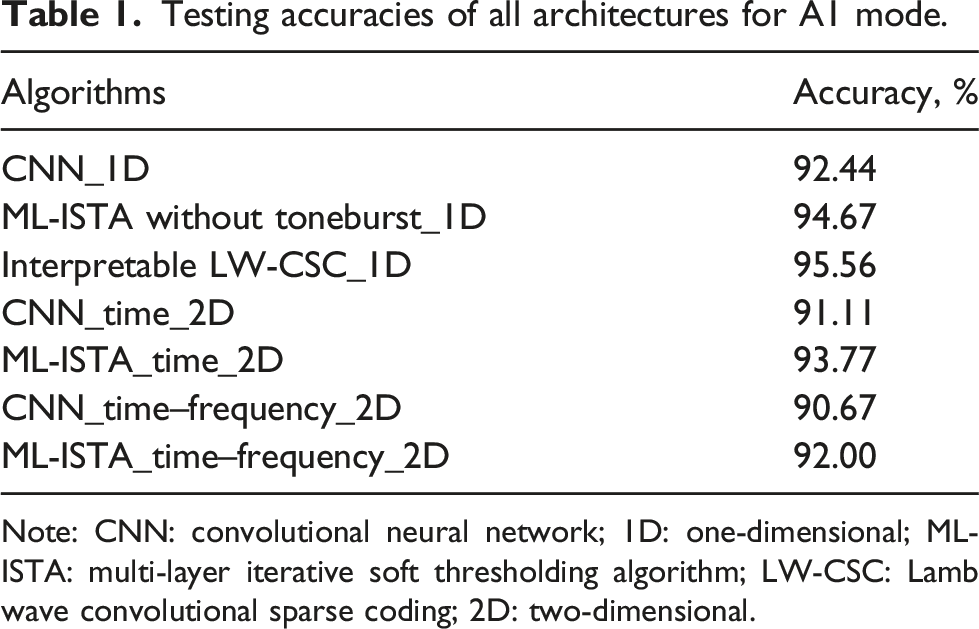
Two 2D datasets are prepared in this section, one is to rearrange the 1D time-domain signals, and the other is to obtain 2D data directly from the time–frequency domain (i.e., CWT spectrogram). For the first type, the 2D inputs from time domain are generated from the 1D time-domain signals by sequentially stacking every certain number of points. Hence, the input size is 50 × 30. The kernel sizes of three convolutional layers are 8 × 8, 4 × 4, and 2 × 2, with the number of kernels of 8, 16, and 16, respectively. Same settings are maintained for ML-ISTA and CNN. Figure 13 shows the testing accuracies for ML-ISTA with one unfolding and corresponding CNN. The final accuracies are 93.77% and 91.11%, respectively. For the second dataset, the CWT spectrograms from time–frequency domain of A1 mode (e.g., Figure 6 (b)) are collected as 2D input. The input size is 32 × 32, and the kernel sizes of three convolutional layers are 8 × 8, 5 × 5, and 3 × 3 with the number of 8, 16, and 16. In this case, the final results for the two architectures are 92% and 90.67%. Testing accuracies of iterations are depicted in Figure 14. Both these two results illustrate the effectiveness of the ML-ISTA in improving the classification accuracy. The comparison of several CNN based architectures is given in Table 1. As the results show, the proposed interpretable LW-CSC method has the best classification performance. All architectures based on ML-ISTA are better than the corresponding CNN. The performance of 2D input is slightly worse than that of 1D input, especially for time–frequency input datasets. Testing accuracies for ML-ISTA and CNN of 2D inputs from time domain. Note: ML-ISTA: multi-layer iterative soft thresholding algorithm; CNN: convolutional neural network; 2D: two-dimensional. Testing accuracies for ML-ISTA and CNN of 2D inputs from time–frequency domain. Note: ML-ISTA: multi-layer iterative soft thresholding algorithm; CNN: convolutional neural network; 2D: two-dimensional. Testing accuracies of all architectures for A1 mode. Note: CNN: convolutional neural network; 1D: one-dimensional; ML-ISTA: multi-layer iterative soft thresholding algorithm; LW-CSC: Lamb wave convolutional sparse coding; 2D: two-dimensional.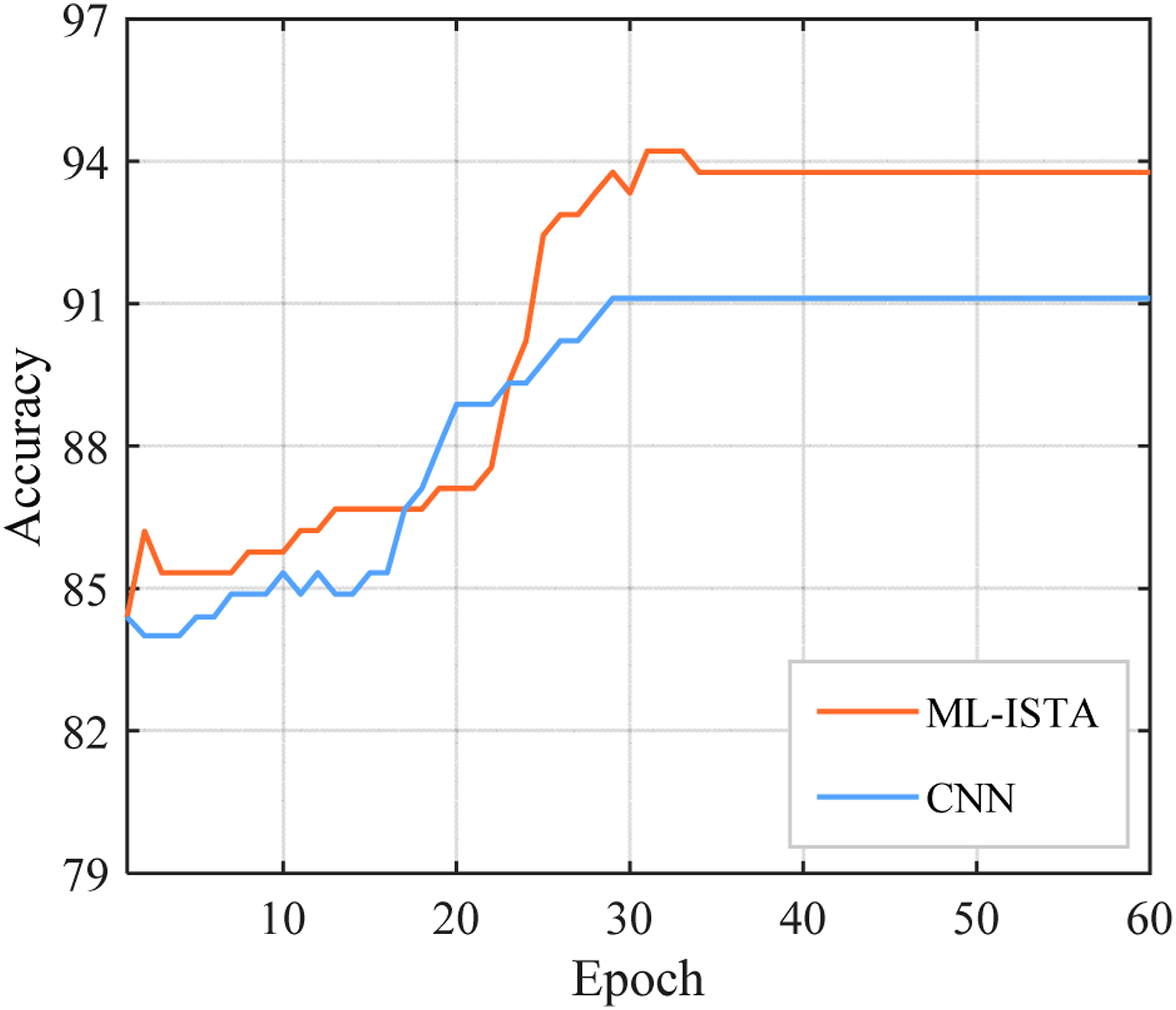
Comparison with traditional methods
Lamb wave tomography is a practical tool to quantitatively inspect structures quickly. Jansen and Hutchins 41 reconstructed tomographic images of defects in composite materials. Nagata et al. 42 utilized filtered back-projection and laser ultrasound to achieve damage imaging in aluminum plates. DIs such as time-of-flight and amplitude are commonly used as input in filtered back-projection and algebraic reconstruction algorithms for damage localization.43,44 However, it is difficult to extract these DIs from complex Lamb wave signals.
In our previous work,
45
probabilistic tomography was utilized for damage localization. Image difference coefficient is extracted from broadband Lamb wave signals. Figure 15 shows the imaging result obtained from image difference coefficient. Besides localization in probabilistic tomography, the method in this article can employ multiple paths through the damage to construct the damage contour. In addition, our method is also suitable for multi-classification. More damage parameters, such as direction and depth, can be identified and used for quantitative damage assessment. Imaging result using image difference coefficient.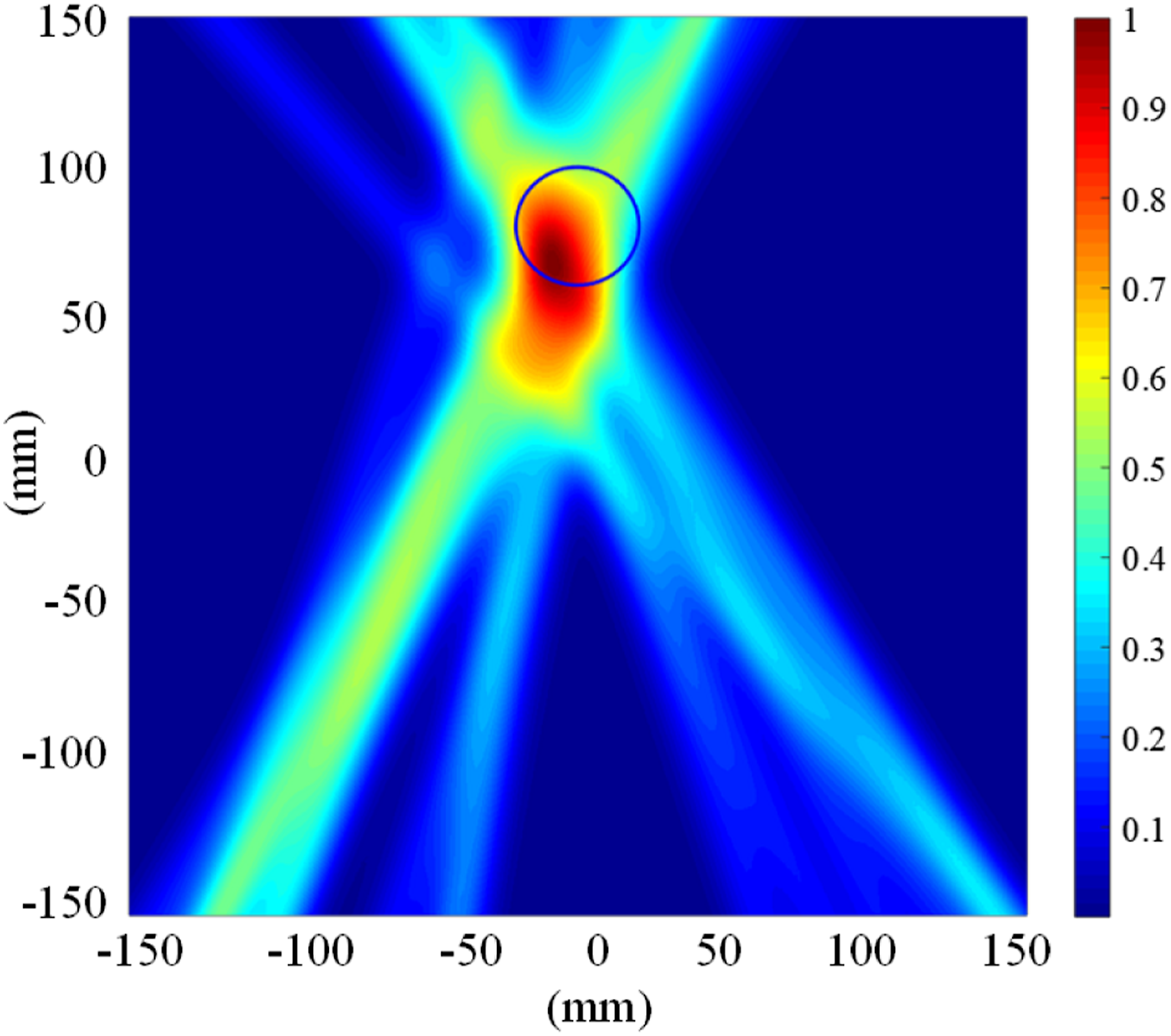
Multi-classification case with interpretable LW-CSC
To verify the effectiveness of our method in the multi-classification case, a more complex configuration is studied. The schematic of the arrangement of transducers and positions of damages is shown in Figure 16. T1–T12 are piezoelectric transducers, and D1–D28 are simulated delamination damages at different locations.
46
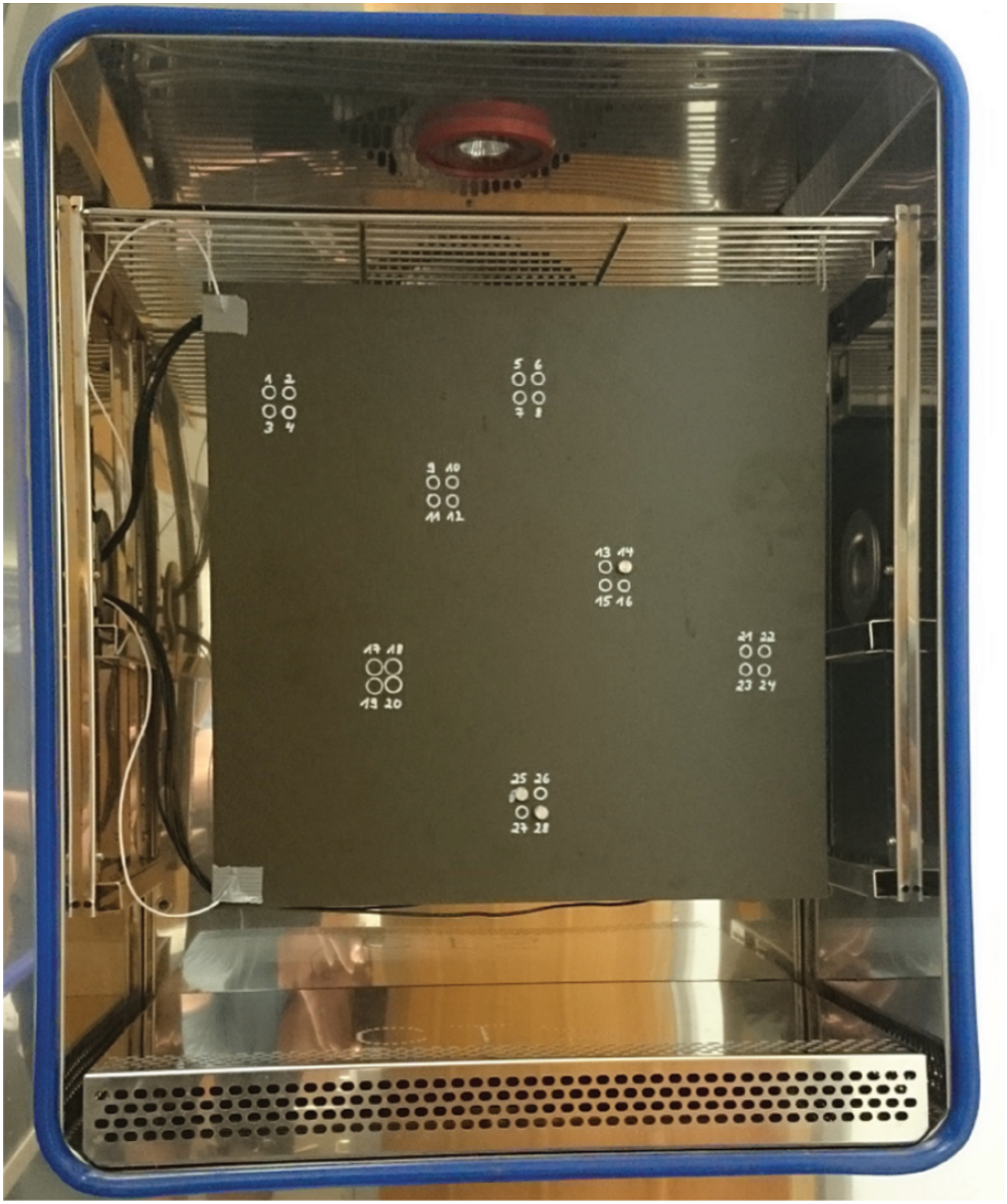
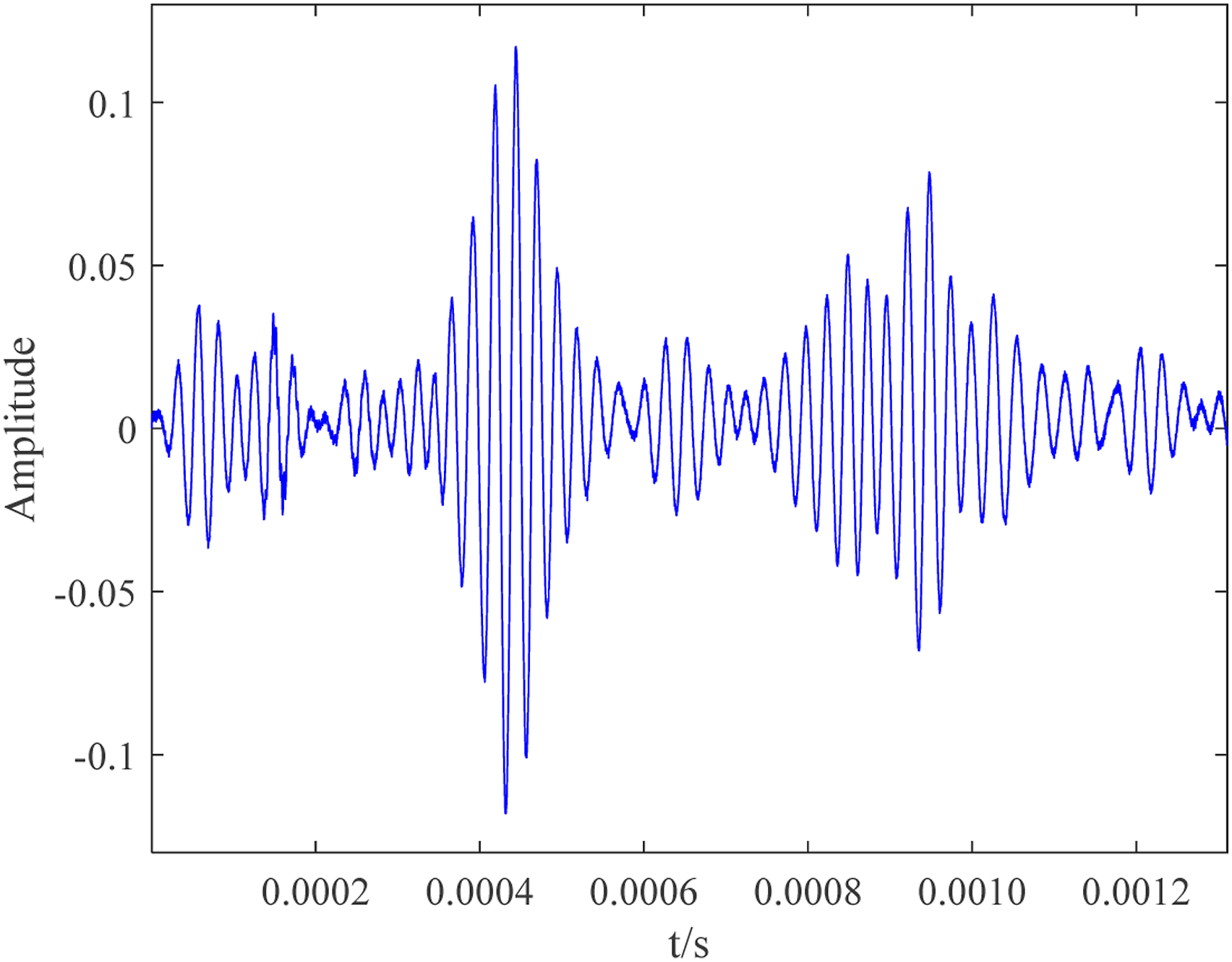
The damages are simulated by a bonded aluminum disk with a diameter of 10 mm and a thickness of 3 mm. These 28 damages are clustered into seven damage regions for localization purposes. Figure 17 shows the experimental setup on the composite plate with the dimensions of 500 × 500 × 2 mm. 5-cycle toneburst signals are used for excitation with the center frequencies of 40 kHz, 60 kHz, and 80 kHz. 36 transmission channels composed of 12 transducers are employed in this section. Figure 18 shows an example of the time-domain response (frequency = 40 kHz and damage =D1). To improve the generalizability and robustness of the network, two levels of random Gaussian noise are added to data. In this study, the dataset includes 9072 samples, of which 945 samples are testing dataset. Transducer positions T1–T12 and damage locations D1–D28. Experimental setup on the composite plate.
46
Signal acquired at 40 kHz with damage D1: Actuator = T6 and Receiver = T12.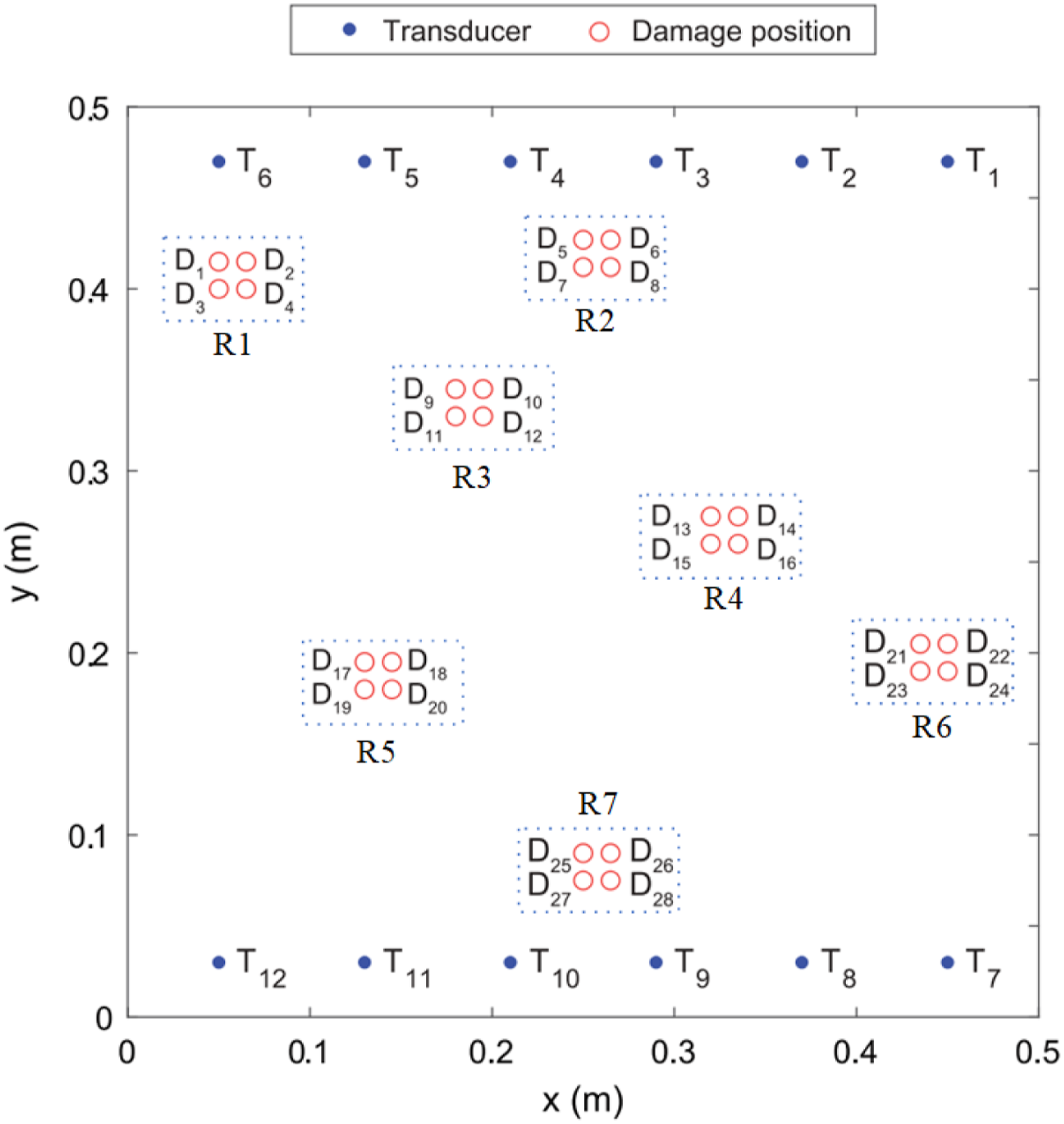
Testing accuracies of all architectures.
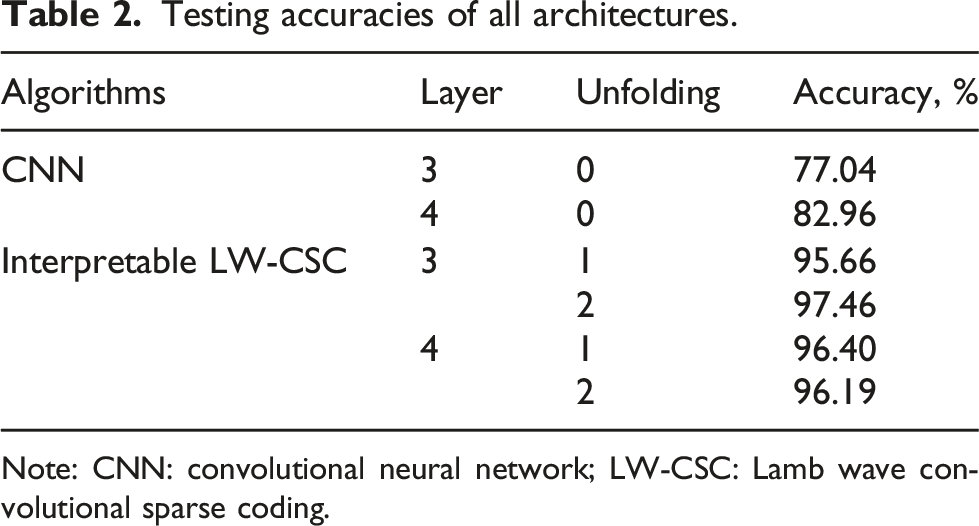
Note: CNN: convolutional neural network; LW-CSC: Lamb wave convolutional sparse coding.
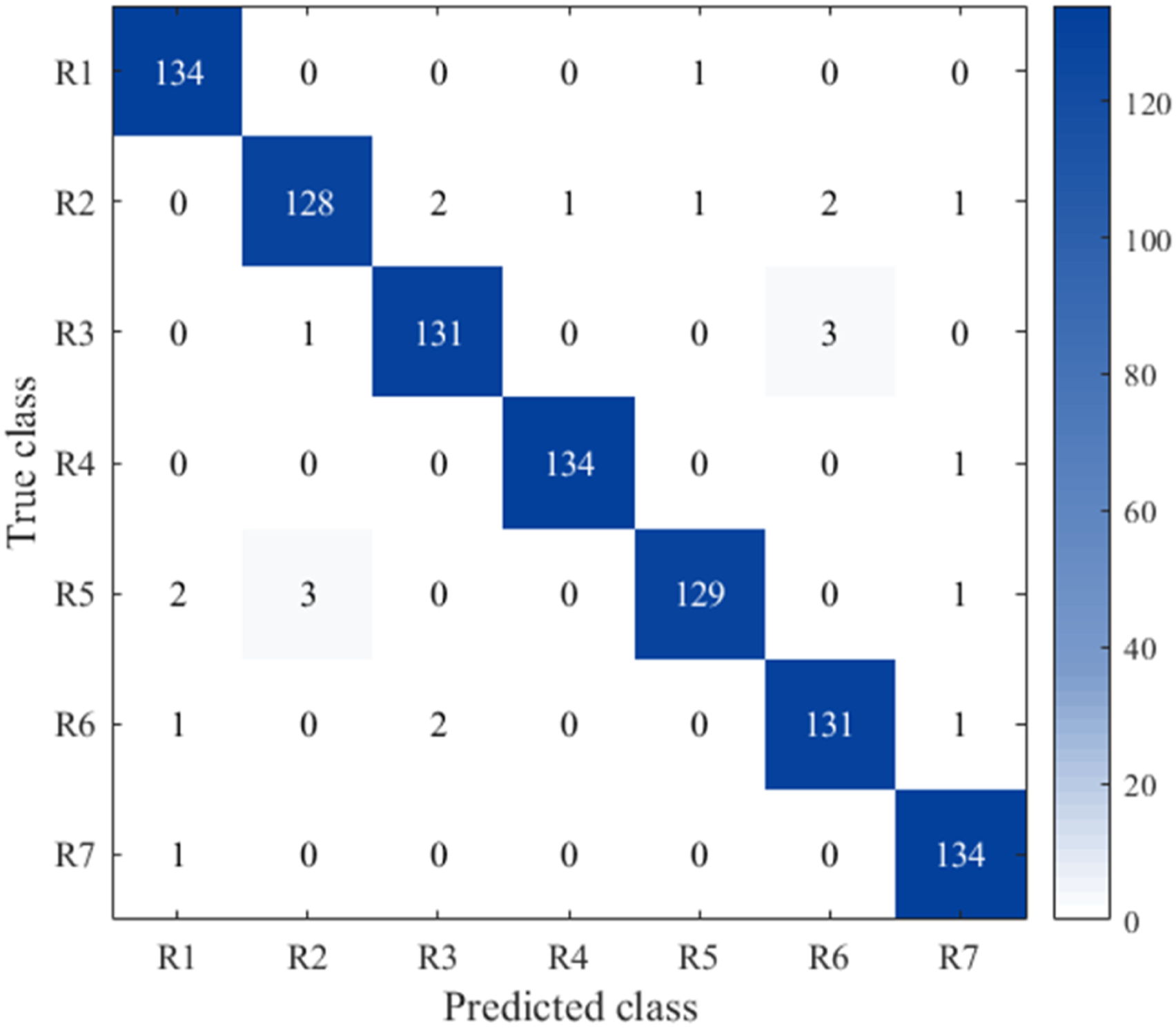
Confusion matrix for interpretable Lamb wave convolutional sparse coding with three layers and two unfoldings.
Conclusions
In this study, an interpretable Lamb wave convolutional sparse coding method is proposed for structural damage identification and localization. Based on the presented validation results, several conclusions can be summarized in the following. The interpretable Lamb wave convolutional sparse coding method proves its effectiveness in improving the accuracy for damage localization. The proposed method could achieve a deeper network with the same number of parameters compared to conventional CNN architecture, making it easier to extract weak damage features of Lamb waves. The feature maps obtained by the first convolutional layer initialized with toneburst signals perform more interpretable unlike the traditional network using random initialization because the convolution kernels rely on the parameters with clear physical meaning.
Some further thinking and potential research directions are concluded as follows.
To make full use of complex Lamb wave signals, this method will be implemented in multi-classification cases. Delamination from different layers of composite laminates is often difficult to detect. The method in this article may give a potential solution to identifying the layer of delamination. In addition, gradients problem is still one of the limitations on this method. The approach exploited to prevent vanishing and exploding gradients during training is important. Another limitation is the sensitivity of the model to kernels. It is critical to properly initialize the network to enhance the interpretability, including the dictionary design.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The work is supported by the National Natural Science Foundation of China (Grant No. 52175073, 51805015), the Open Foundation of Henan Key Laboratory of Underwater Intelligent Equipment (Grant No. KL03B2105), and the Open Foundation of State Key Laboratory of Digital Manufacturing Equipment and Technology (Grant No. DMETKF2021006), which are highly appreciated by the authors.