
Abstract
Rub-impact is a common nonlinear fault of the rotor system, occurring in rotating machines with radial clearance between the rotor and the stator, which may lead to serious consequences. Since the vibration response of rotor rub-impact is shown as multicomponent with time-varying characteristics of undulatory instantaneous frequency, it is desired to exploit advanced signal processing methods for rub-related feature excavation and failure diagnosis under complex noise interferences, which is of crucial significance to ensure the stable and efficient operation of the whole unit. This paper concerns the processing of acceleration signals and proposes a novel intrawave frequency modulation detection approach for structural rotor rubbing diagnosis based upon targeted component extraction and stochastic resonance enhancement. First, the acquired vibratory acceleration signal is converted into displacement signal via a two-stage integration strategy. Next, to extract the rotating frequency component of high information clarity for further time–frequency analysis from the multicomponent signal, an especially designed improved variational mode decomposition method based on the modified target frequency index is put forward, and the instantaneous frequency of the objective component is estimated. Then, the optimum stochastic resonance is leveraged for intrawave frequency modulation enhancement. Finally, the rotor rub-related symptom can be distinctly revealed and the diagnostic procedure can be performed. The effectiveness and superiority of the proposed rotor rub-impact diagnosis approach are demonstrated through both simulations and experiments, indicating that it is suitable to be implemented in practical applications, with high noise-resistance ability, and can efficiently extract the potential characteristics of rotor rub-impact malfunction from multicomponent signals.
Keywords
Introduction
The structural rotor is one of the most pivotal components of rotor-system-based rotating machineries, such as wind turbines, rotary compressors, centrifugal pumps, engines, generator sets, and so on, which have occupied a crucial place in numerous modern applications, including mining, metallurgy, energy production, and transportation. Due to the extreme and harsh operating conditions, structural rotors can be subjected to a variety of potential malfunctions, for instance, imbalance,1–4 cracking,5,6 misalignment,4,7 looseness,2,3 oil whirl,6,7 cocked, 8 and so on. As a frequently occurring failure exhibiting nonlinearities, a rub-impact fault happens when the rotor cyclically strikes the rotor system’s stator, the cause of which usually can be the initial subtle imbalance and faint misalignment of the rotor, especially when the shaft is at a tremendously high rotational speed and the radial clearance between the stator and the rotor is considerably faint. As a matter of fact, with the higher requirements and more stringent specifications of assembly precision, today’s machine structure has become relatively more sophisticated and more compact, which operates under extremely diminutive clearance, making the occurring probability of rub-impact in the rotor system increase more impressively. Once the rub-impact fault occurs, it can induce the rotor dynamic instability and attenuate the operating accuracy of machine to a large extent, and provoke prejudicial impacts on the concerned equipment’s structural attributes and performance as well as bring about extra defects to the parts associated with it, like bearings and impellers, which will diminish the level of safety and eventually result in system-wide catastrophic failures. Therefore, it is of immense practical significance to perform condition monitoring and fault diagnosis on rotor systems for detecting the initial occurrence of incipient rubbing failures, which can effectively promote the equipment prognosis and health management level and guarantee the safe and stable production of industries.
Research status of rotor rub-impact diagnostic approaches
At present, heaps of researchers have made valuable achievements in rotor rub-impact detection and diagnosis utilizing various techniques, which can be mainly categorized into signal-processing-based methods and intelligence-based approaches. For intelligence-based approaches, rub-related features can be extracted from the acquired signals through feature engineering and then be fused and identified by machine learning approaches, such as support vector machine and random forest. For exemplar, to avoid the loss of structure information in the dimension reduction process, Shi et al. 1 presented a local–global balanced orthogonal discriminant projection method for effective fusion of tridomain features, and the K-nearest neighbor classifier was adopted for various rotor fault identification, including misalignment, unbalance, rubbing, and looseness, which achieved high recognition accuracy. Furthermore, unlike the limited learning capacity of conventional machine learning models due to shallow architectures, the deep learning approaches emerging in recent years have made significantly important contributions toward solving the problem of automatically feature learning with the informative semantics from raw data via the well-known representation learning mechanism, whose capability in rotor system failure distinguish have also been exploited extensively, such as deep belief network, 7 convolutional neural network (CNN), 9 multibranch CNN, 10 and so on. Notwithstanding, these intelligence-based approaches could suffer from several deficiencies in practice, as: (1) intelligent models usually require a large number of high-quality labeled data with same distribution as the support of training, which is difficult to satisfy in practical applications; (2) the opacity and inexplicability of most deep learning models make them “black boxes” and the prediction results are hard to be trusted; and (3) most of the intelligence-based methods have insufficient generalization ability for tasks of cross-domain diagnosis, which may restrict their application for industrial assets to a great extent. Though the reliable diagnostics of rotor rub-impact based upon intelligent approaches assisted by advanced methodologies like deep domain adaption and physics-informed learning can be considered as a prospective research hotspot, it is out of the scope of this work.
By contrast, signal-processing-based methods are on the basis of comprehensive and profound understanding of system kinematics and failure mechanisms, which can be performed for robust and dependable fault detection and diagnosis of rotor systems. Usually, when rotor rub-impact occurs in a rotating machinery, failure signatures, including synchronous vibration, subsynchronous as well as supersynchronous vibrations, will coexist in the measured signals, which can be observed from the Fourier spectrum. However, these fault characteristics could also be observed in the measured vibration signals when rotor cracking or mechanical looseness fault occurs, 11 which makes it impracticable to diagnose the rotor rub-impact simply based on this principle. Another common defective signature of rubbing is the impacts generated by the contact and separation process between the rotor and the stator, which is relatively inconspicuous and usually hidden in the acquired vibratory signals, and effective decomposition methods are needed to separate the target signal from the original signal. Cheng et al. 12 utilized empirical mode decomposition (EMD) to separate the rub-impact signal from the background signal and the noise signal, and the rotor rubbing feature could be unveiled clearly. Jing and Meng 6 leveraged a blind source separation method based on cumulant decorrelation to perform multifault diagnosis of rotor system, including crack and rub-impact, crack and oil-whirl, unbalance, and rub-impact. As a powerful technique for adaptive signal decomposition, the equivalent filtering characteristic and the behavior of wavelet packet-like expansion of variational mode decomposition (VMD) were investigated in the study by Wang et al., 13 and then, the VMD was employed to detect multiple rubbing-caused signatures for rotor system fault diagnosis, and the conducted comparison analysis showcased that the performance of VMD was superior to empirical wavelet transform (EWT), EMD, and ensemble EMD. An adaptive parameterless EWT (APEWT) method was presented in the study by Zheng et al. 14 to achieve adaptive separation of the rub-induced signal, with the experimental results indicating that the APEWT could fulfill effective and robust fault detection and diagnosis of rotor rubbing. In addition, the vibration response of rotor rub-impact can be characterized by nonlinear stochastic dynamics caused by extra excitations, based upon which indicative approaches could be studied and coined for failure identification. Xia et al. 15 proposed a novel Volterra series identification method based on key kernel-particle swarm optimization (PSO) to classify different fault conditions of the rotor-bearing system, including rub-impact and imbalance. Based on Volterra series theory, nonlinear output frequency response functions (NOFRFs) are a series of one-dimensional functions that can solve the multidimensional problem and improve the calculation accuracy for the nonlinear output of a system. On the basis of NOFRFs, Liu et al. 16 constructed an instructive indicator for rotor rub-impact diagnosis, where the stochastic resonance (SR) was used for periodic component enhancement of the raw signal, and its parameters were optimized via the genetic algorithm. Similarly, Lu et al. 17 developed a quantitative diagnosis method of rotor rub-impact based upon improved NOFRFs, and the weighted contribution ergodic index was proposed to consider rotor system responses in a wide range of harmonic excitations, which could capture more comprehensive system characteristics and make the diagnosis results more reliable. Actually, the vibration signal of rotor rub-impact can exhibit a periodic amplitude modulation (AM), which is induced by the periodically modulated instantaneous amplitude (IA) of rubbing, and a more distinct rotor rub-impact feature is that the instantaneous frequency (IF) of the principal component in vibration response periodically fluctuates around the rotational frequency. In order to extract these rotor rub-induced features from the nonstationary vibratory signals, time–frequency analysis (TFA) methods seem to be promising tools. Chandra and Sekhar 18 evaluated the fault detection performance of three TFA methods, namely, short-time Fourier transform, continuous wavelet transform (CWT), and Hilbert–Huang transform (HHT) in rotor systems, where the rotor startup vibrations were utilized for analysis, and the results embodied that both the CWT and the HHT were effective for diagnosis of shaft misalignment and rotor rubbing faults based on the run-up data. Hu et al. 11 conducted a purposeful research on the intrawave frequency modulation (FM) characteristics of rotor rubbing and cracking faults via the HHT method, both simulation and experimental results of which showed that the diverse combinations of modulated IF could be the attributes to diagnose rub-impact, cracking, and cracking-rubbing coupled rotor failure. Meng et al. 19 presented a general synchroextracting chirplet transform for rotor rubbing diagnostics based on time–frequency ridge extraction, where the time–frequency representation (TFR) was concentrated via the second-order synchroextracting transform. Zhou et al. 20 developed a modified variational nonlinear chirp mode decomposition (VNCMD) method for intrawave FM phenomenon detection and the rotor-rubbing-related responses could be revealed distinctly. Similarly, Chen et al. 21 proposed a promising method coined adaptive chirp mode decomposition (ACMD), which overcame the instability issues of the original VNCMD, to excavate the rapid fluctuating IF from vibratory mixture for tangibly unveiling the rotor rub-impact failure. Demonstration analysis based upon both dynamic simulations and real-world vibration signals of the rubbing rotor indicated the viability as well as effectiveness of ACMD in multifeature extraction and incipient rub-impact diagnosis.
Motivation
As can be seen from the above, the development trends and characteristics of various methods for rotor rub-impact fault detection and diagnosis can be broadly summarized as follows: (1) recently, the fluctuating frequency of the fundamental component’s IF, which is accordant with the rotating harmonics of the measured vibratory signal when rotor rubbing occurs, has become the most distinct and significant feature for rub-impact failure authenticating; (2) advanced TFA-based methods are vigorous means for analyzing rotor rub-impact failure, which are not only utilized for target component extraction from the complex multicomponent signal, but also used to perform accurate estimation of the fast fluctuating IF, which is of vital importance for the diagnostic process; and (3) most of the aforementioned methods are based on vibratory displacement signals for diagnostic analysis of rotor systems, because the displacement signal usually has a higher signal-to-noise ratio (SNR) and can accurately reflect the vibration state of the rotor, as described in references.6,18,22–24 However, it should be noted that although the displacement sensor has the advantages of large linear range, zero frequency response, strong anti-interference ability, and easy-to-calibrate, its practical application is not as extensive as that of the acceleration sensor and is generally only applicable to rotor system monitoring of large rotating machineries, which is mainly restricted by complex installation requirements, economic considerations, and other factors. Thereupon, the signal-processing-based diagnosis methods developed based on displacement signal analysis may not be applicable in practice in some scenarios, and it is imperative to study more universal advanced diagnostic strategies, as rub-impact failure could occur in all kinds of rotor-system-based rotating machineries. In order to develop a pragmatic as well as effective approach for rotor rub-impact diagnosis, this paper concerns the processing of acceleration signals, which are the most widely used in actual measurement, and develops a novel intrawave FM detection method based on improved VMD (IVMD) and optimum SR (OSR) for targeted component extraction and FM characteristic enhancement. Aiming at capturing more discernible rotor dynamic characteristics as well as promoting the overall rotor rubbing diagnostics effect, a two-stage integration strategy combined with high-pass filtering is employed to convert the collected vibration acceleration signals into displacement signals. Coping with the multicomponent signal subject to intricate noise interferences, a newly designed modified target frequency index (MTFI)-oriented IVMD is utilized for the extraction of the most informative component for further TFA purpose, for the reason that VMD and its variants featuring the merits in the counterbalance of the backward error with high noise resistance, and sparsity-oriented quasi-orthogonal bandwidth-limited purposeful modals, possess strengths in multicomponent nonstationary signal analysis and have attained extensive adoption in the field of rotation machinery fault diagnosis.13,25–29 Then, the IF of the targeted component is estimated, where the rotor rub-related symptoms are presumably obscured by noise. To address the aforesaid issue, the SR optimized by PSO is leveraged to enhance the faint FM characteristic for proclaiming the rotor-rubbing-induced features, inasmuch as SR as a weak oscillation heightening methodology with the assistance of proper noise has been widely used in tenuous failure feature excavation of rotating machines.30–32 Based upon the integration of these methods, the reliable and robust rub-impact diagnostics of structural rotor of rotating machineries via vibration acceleration signals under intricate noise interferences can be materialized, and it is worth mentioning that these technical methods used in this work are not simple combinations, but they are closely related internally, forming the efficient sequential procedure of signal converting, targeted component extraction, feature enhancement, and fault diagnosis. Furthermore, when the proposed rotor rubbing diagnosis approach is applied for deployment and implementation in practical tasks, only the acceleration signal, sampling frequency, and target rotating frequency are needed as the input, and the output TFR and spectrum of IF can be utilized as support for the diagnostic decision, which can significantly reduce the expert knowledge requirements for the maintenance personnel.
Novelties and structure of this study
In this paper, in view of utilizing acceleration signals instead of displacement signals for analysis, a novel structural rotor rubbing diagnostic approach based upon targeted component extraction and SR enhancement is proposed, where the IVMD and OSR are developed for intrawave FM detection and noise interferences resisting. First, the acquired vibration acceleration signal is converted into displacement signal via a two-stage integration strategy, where the low-frequency components that can cause great disturbances to the integration result are eliminated by the high-pass filters during the converting process. Nonetheless, the obtained vibration displacement signal will inevitably contain a lot of intricate interferences, including complex noises from the external environment and sensor measurement, as well as errors from the digital signal integration process. Thereby, aiming at extracting the principal harmonic for further TFA from the noisy multicomponent signal with more efficiency, the IVMD method based on the indicator of MTFI is developed to recover the most informative rotational frequency component while eliminating the interference noises, where the prior initial center frequency (ICF) and mode number can be set in advance and the optimal bandwidth control parameter can be selected in an iterative process, and then, the modulated IF of the target intrinsic mode function (IMF) is estimated by the quadrature-derivative-based normalized Hilbert transform (QDBNHT). Subsequently, the intrawave FM characteristic of potential rotor rub-impact is ulteriorly enhanced by the SNR-maximization-oriented OSR approach with the small-parameter limitation problem being solved by the fourth-order Runge–Kutta method, whose system configuration parameters and tunable calculation step are jointly optimized via the PSO algorithm. Ultimately, the underlying rotor rubbing failure signatures can be revealed from the Fourier spectrum of the enhanced IF distinctly, which can be used as support for diagnostic decisions. Furthermore, both simulation analysis and experimental verifications profoundly corroborate the effectiveness and superiority of the proposed rotor rub-impact diagnosis approach.
The main novelties and contributions of this paper can be summarized as follows:
(1) Different from most of the displacement-signal-analysis-based methods, the proposed approach considers utilizing the vibration acceleration signal that is more universal in practice for rotor rub-impact diagnosis, through a two-stage integration strategy and other advanced techniques, which is of prominent practical engineering significance. To the best of the authors’ knowledge, this has been rarely studied and explored in the literature before.
(2) To handle the complex interference noise and approximate error effects of the converted multicomponent signal, a novel signal-deconstruction-method-coined IVMD is developed, which features the capability of efficient excavating of the informative targeted component with high noise resistance.
(3) For intrawave FM detection, the IF estimation of the objective component via the QDBNHT can overcome the drawbacks of conventional Hilbert transform methods, including energy leakage, negative frequency, and boundary effect, and the rubbing-fault-induced nonlinear FM characteristic enhancement based upon OSR can help capture weak rub-impact patterns of the rotor system and attain robust fault diagnostics, which has also been seldom reported in the previous research work.
(4) For reliable and robust structural rotor rub-impact diagnostics, the proposed approach is not a straightforward combination of many technical methods, but all the related parts are inextricably linked with each other internally, to sequentially actualize the novel procedure of signal converting, targeted component extraction, feature enhancement, and fault diagnosis. Moreover, when the proposed approach is deployed for engineering applications, it can be encapsulated into an end-to-end formality and only the acceleration signal, sampling frequency, and target rotating frequency are needed as the input, which can reduce the reliance on expert knowledge for maintenance personnel to a great extent.
(5) The proposed approach is validated by utilizing simulation data and vibration signals of rotating machineries with diverse cases to sufficiently illustrate its superiority in targeted component extraction, noise resistance, and intrawave FM capturing, compared with other state-of-the-art TFA methods.
The content of the remaining part of this article is as follows. The second section presents the proposed diagnostic framework and techniques involved. Then, the performance of the proposed approach is investigated and verified by synthetic signals in the third section. In the fourth and fifth sections, the effectiveness and superiority of the proposed approach are experimentally validated through the vibration data from a rotor system test rig and a centrifugal pump bench, respectively. Finally, the sixth section concludes this research.
Methodology
Overview of the proposed structural rotor rub-impact diagnostic approach
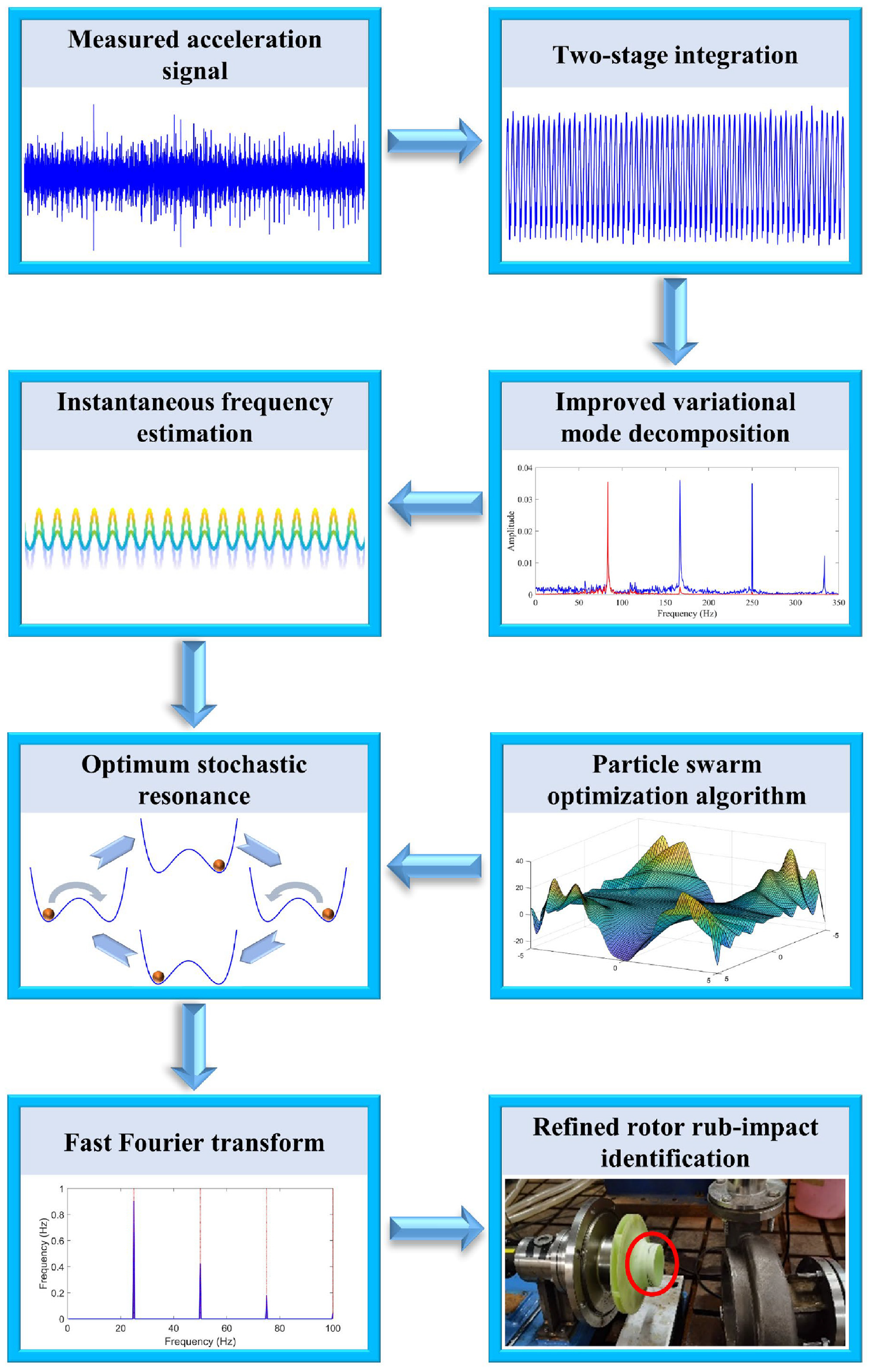
In order to develop a utilitarian and effective approach for structural rotor rub-impact diagnosis, this paper proposes a novel intrawave FM detection method based upon targeted component extraction and SR enhancement, combining signal integration, IVMD, QDBNHT, and OSR, which can be implemented directly on the vibration acceleration signals. For the excavation of the faint rubbing-induced characteristics, Figure 1 showcases the flow-process diagram of the proposed approach, and the detailed steps are as follows.
Step 1: The acceleration signal is collected from the rotating machinery by a vibration sensor.
Step 2: The acquired vibratory acceleration signal is converted into the approximated displacement signal via the two-stage integration strategy.
Step 3: The proposed IVMD is utilized to extract the target rotating frequency component from the converted displacement signal.
Step 4: The IF of the target rotating frequency component is estimated via the QDBNHT method.
Step 5: The SR method is used for intrawave FM enhancement, whose potential parameters and tunable calculation step are synergistically optimized via the PSO algorithm.
Step 6: The enhanced IF is processed by the fast Fourier transform, and the refined identification of structural rotor rub-impact can be carried out.
According to the above structural rotor rub-impact diagnostic framework, techniques about the two-stage signal integration, IVMD, QDBNHT, SR, and PSO algorithm are required in implementing the proposed approach, the technical details of which will be provided in the following.
Overall procedure of the proposed method.
Two-stage integration strategy
According to references,6,18,22–24 displacement signals possess preponderances in reflecting the vibration state of the rotor; ergo, it is necessary to transform the acquired acceleration signals into the approximated displacement signals for further detection of potential rotor rubbing signatures. For a measured acceleration signal


where


The whole two-stage integration strategy for signal converting is unveiled in Figure 2. The signal
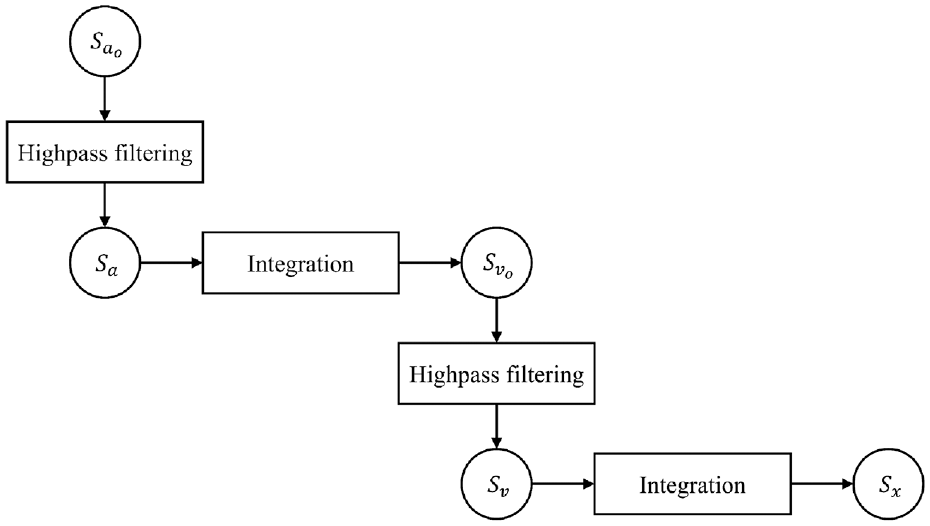
Flowchart of the two-stage integration strategy for signal converting.
Improved VMD
Related theory of VMD
As an alternative scheme of EMD, VMD is a recently proposed, nonrecursive, fully intrinsic, and self-adaptive signal decomposition method with a solid theoretical foundation, which can be viewed as a generalization of the canonical Wiener filter into multiple adaptive bands. Through the constraint condition by minimizing the sum of the estimated bandwidth of each variational modal, VMD can disintegrate the input signal

where

where
Therefore, the constrained variational problem of VMD can be given as:
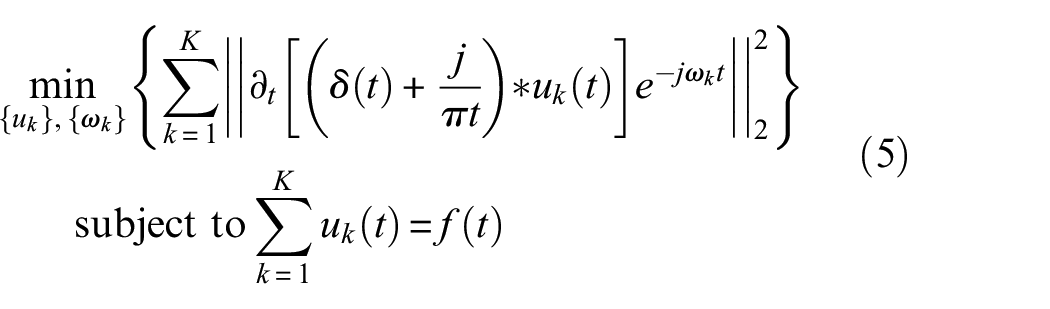
where
A quadratic penalty term and a Lagrangian multiplier term can be applied to make equation (5) unfettered to address the minimization problem, as follows:
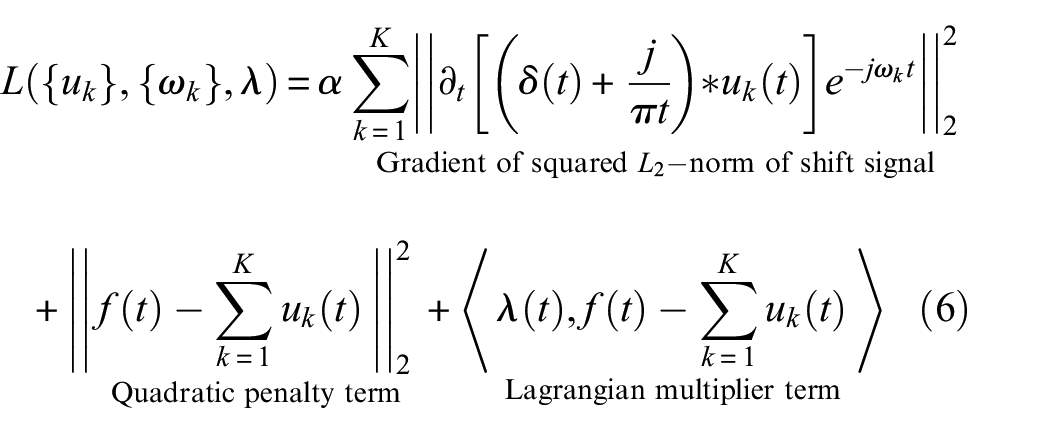
where
(1) Initialize
(2) Iteration
(3) For
Update

(4) Dual ascent for all

where
(5) Repeat steps (2)–(4), till the iteration termination condition is gratified:

where
For more details about VMD, refer to reference. 33
The developed IVMD
As a parametric adaptive signal decomposition approach, VMD is in relation to two pivotal parameters, including the modal number
In order to deal with the aforesaid issues, an improved-VMD-algorithm-coined IVMD is designed, which concentrates on the extraction and denoising of the principal frequency component, and accordingly, the mode number is set as 1 with the prior ICF of


where
The specifics of the proposed IVMD are indicated in Figure 3, with the concrete implementation steps as follows:
(1) Input the displacement signal
(2) The VMD is executed on the displacement signal
(3) Start loop. Set
(4) If
(5) If
(6) End loop. Obtain the target rotating frequency component
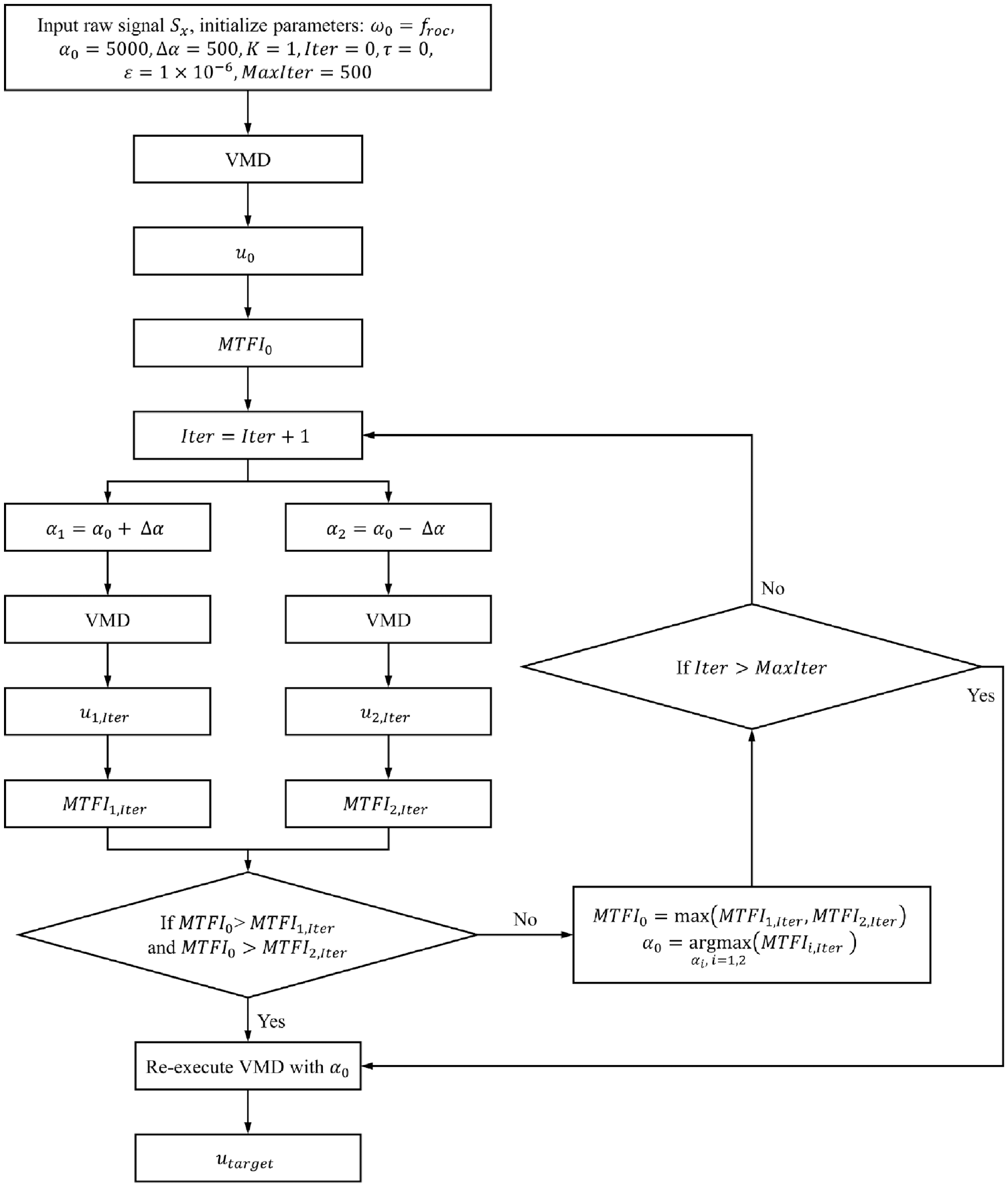
The algorithm flow diagram of IVMD.
Demonstration of IVMD performance
In this subsection, the intrinsic mechanism of the proposed IVMD is briefly elaborated by taking the synthetic signal with SNR = −10 dB in “Numerical validation using synthetic signal” section as an exemplar, whose waveform and Fourier spectrum are presented in Figure 9. This is a three-component simulation signal with rapidly fluctuating IFs and additional tumultuous noise, and the aim is to extract the target rotating frequency component and eliminate other irrelevant components as well as interference noise as much as possible. Here, another indicator


During the IVMD signal processing process, the changes of indicator values of
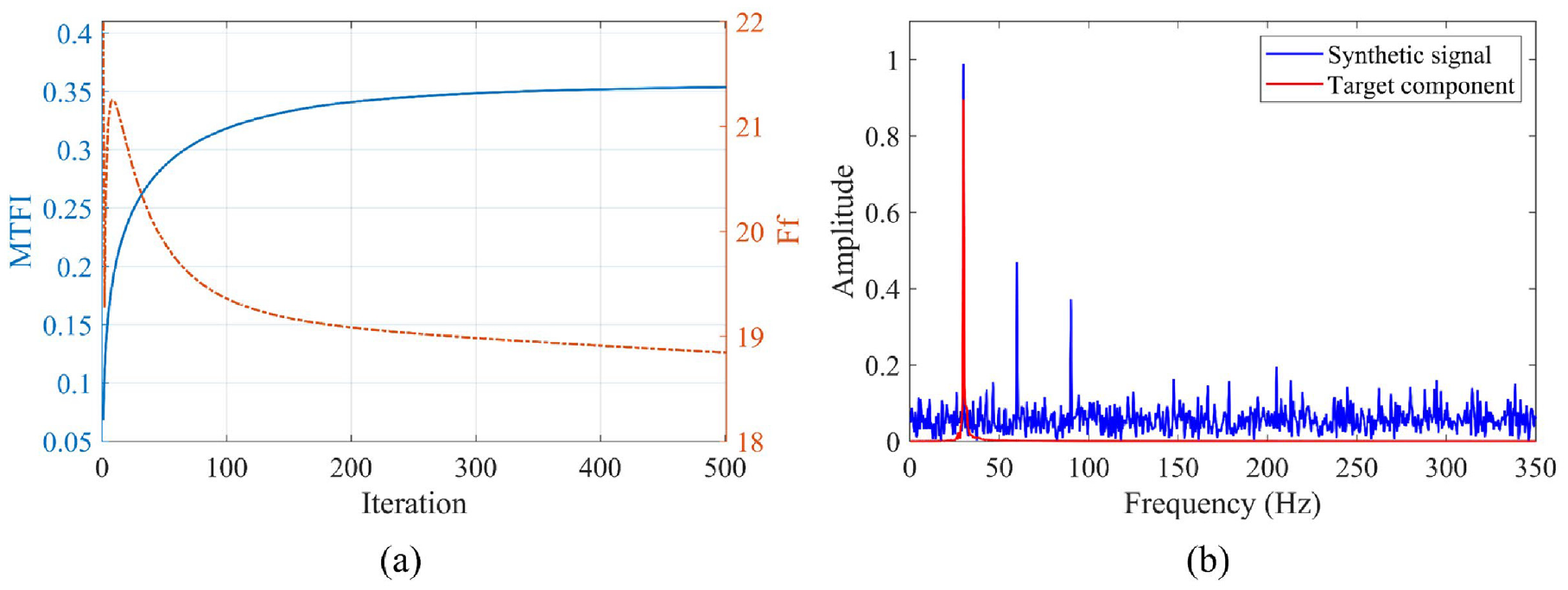
Demonstration of the IVMD process and the results: (a) changes in two indicators along with the IVMD iteration and (b) the Fourier spectra of the original synthetic signal and the extracted target component.
IF estimation
Hilbert transform is an effective demodulation approach for AM-FM signal analysis, which has been widely used in various applications, for a given real-valued signal

where

where the real-valued functions
Nonetheless, the estimated value of IF using Hilbert transform is usually influenced by the problems of energy leakage and negative frequencies. A modified version of original Hilbert transform, the normalized Hilbert transform, is able to evade the negative frequencies, yet the end effect is inevitable in considerable number of scenarios, limited by the Bedrosian theory. Thereupon, to overcome the shortcomings of the above methods, an improved IF estimation technique is adopted in this work, namely, the QDBNHT method. 14 On the basis of empirical AM-FM decomposition, the detailed steps of the improved IF estimation method are instructed as follows:
(1) For a monocomponent AM-FM signal
(2) Divide
(3) The IA of
(4) Let
The PSO-optimized SR
Related theory of SR
SR, as a nonlinear signal processing method, can be described as a physical phenomenon: consider a Brownian particle that oscillates within a bistable potential in the presence of noise and periodic force, and it can spring between two potential wells with the aid of appropriate noise, following the frequency of the faint periodic force. To describe SR, the overdamped stochastic differential equation is considered as follows 32 :

where

where
The output amplitude

where

It can be seen from equations (19) and (20) that, for a deterministic periodic signal, the output signal’s amplitude of SR is a nonlinear function of

Therefore, equations (19)–(21) indicate that the output of the SR system can be manipulated by turning the system parameters or noise intensity properly.
PSO algorithm
Inspired by the collective foraging behavior of birds and other animals to solve optimization problems through swarm intelligence, the PSO algorithm is a powerful technique for finding the optimal solution, which is especially suitable for issues with high dimensionality and complicated framework. During the optimization procedure of PSO, it selects the optimal solution from the searching space to maximize the prespecified objective function, defined as


where


where

where the iteration number

where


Also, the position and velocity of each particle are modified to prohibit the particles from moving beyond the borderlines of the searching space at each iteration, as follows:


where
Optimum stochastic resonance
After the target rotating frequency component has been extracted from the displacement signal via IVMD, the QDBNHT method is employed for IF estimation. Notwithstanding, due to the influence of interference noise and approximation errors, the fault characteristics related to rotor rub-impact in the estimated IF may be not significant enough and may be misdiagnosed as other faults if directly utilized for analysis, such as rotor cracking and mechanical loosening.6,11 Ergo, the noise-driven SR method optimized by the PSO algorithm is leveraged for intrawave FM characteristic enhancement to perform refined and robust rotor rub-impact identification.
Recalling equation (17), derive the overdamped bistable SR system as follows:

The fourth-order Runge–Kutta approach is employed to solve equation (30), as:
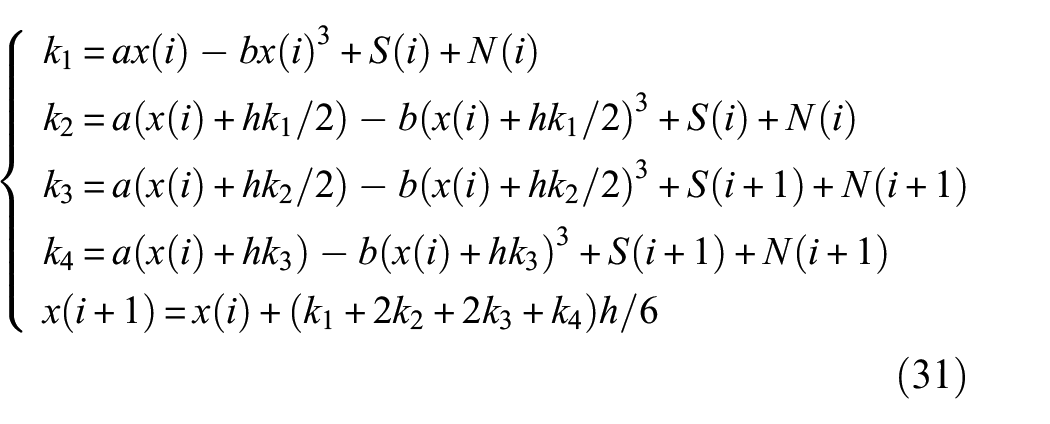
where
in which

where
The procedure of the OSR method for FM characteristic enhancement, as depicted in Figure 5, is illustrated as follows:
(1) Input the estimated IF
(2) Randomly initialize the particles, and the output of the SR system is calculated for each particle. Find the current global best position
(3) Start loop, and set
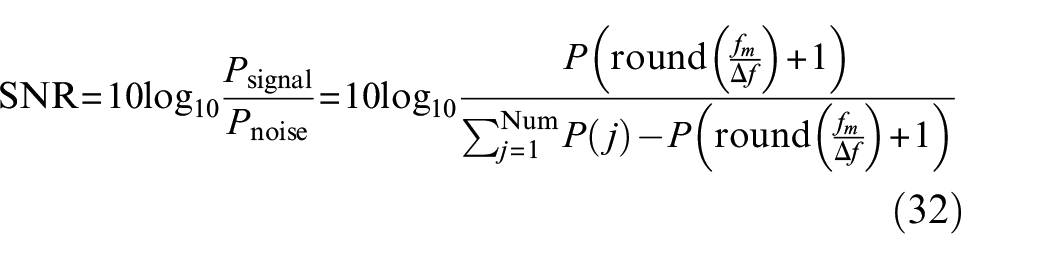
(4) Calculate the difference change of SNR:
(5) If
(6) End loop. Obtain the final optimal output
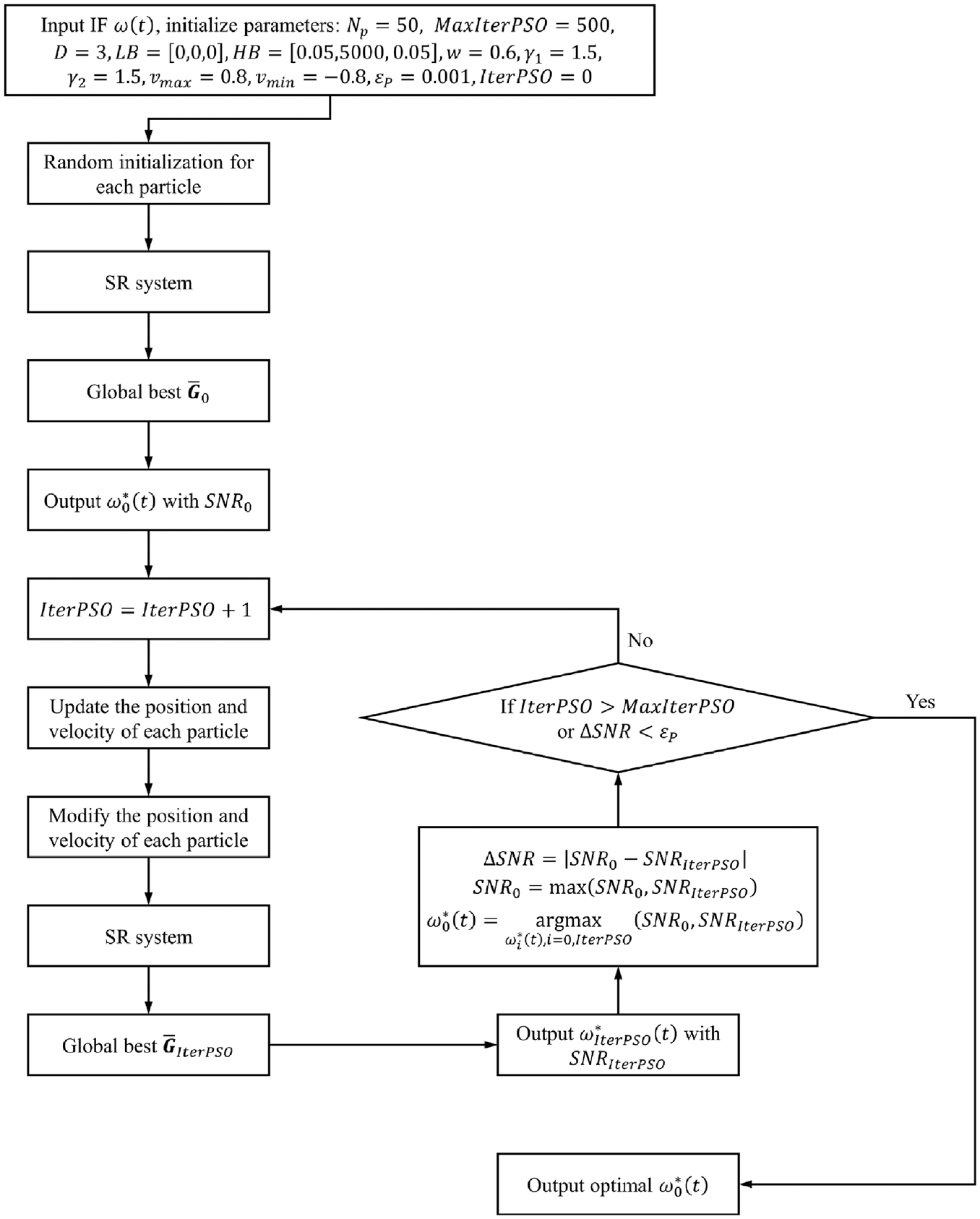
The PSO-optimized SR flowchart.
Simulation analysis
In this section, to verify the effectiveness and preponderance of the proposed approach, two types of signals are imitated for simulation analysis. It should be noted that the two-stage integration strategy in the proposed approach is applicable for practical applications coping with the measured acceleration signals. Here, only the multicomponent signal processing ability and noise-resistant capability in targeted component extraction and FM characteristic enhancement of the proposed IVMD and OSR method are investigated, so the integration strategy is not considered (the simulated signals are all displacement signals). In addition, two advanced TFA methods for intrawave FM detection, that is, HHT 11 and ACMD 21 , are utilized for comparison, where HHT composed of EMD and Hilbert transform has been proved to be an effective tool for analysis of nonlinear unsteady transient vibration signals, which is capable to supply meaningful IF exploration,11,34 and ACMD as a tractable version of VNCMD 35 has showcased promising advantages in analyzing strongly FM signals and computing high-resolution adaptive TFR with more stability.21,36 Consequently, these two representative TFA methods can be considered as the state-of-the-art approaches in nonstationary FM attribute detection and rotor rub-impact signal analysis in the present.
Numerical validation using synthetic signal
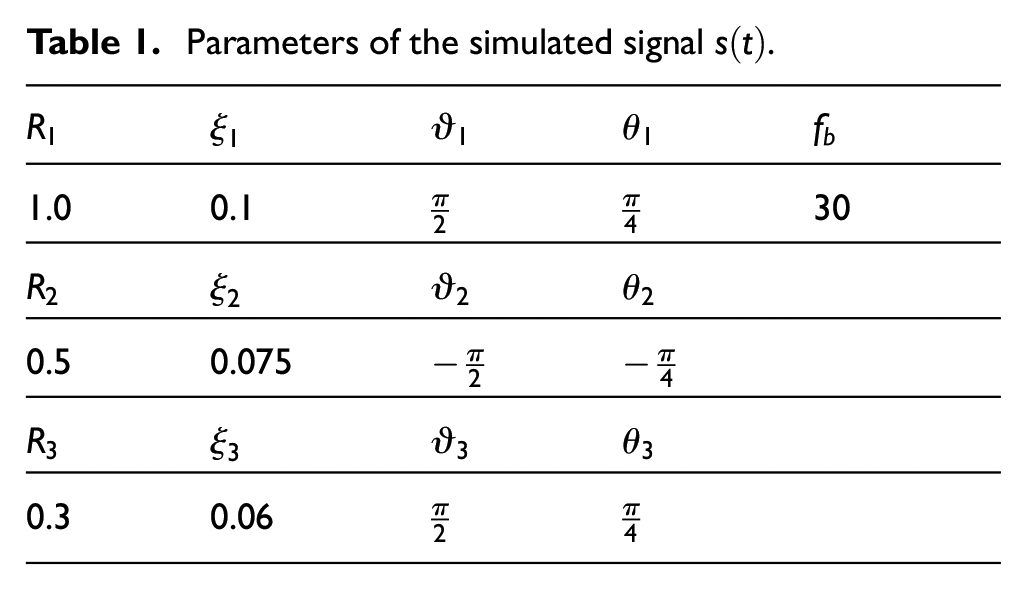
In this subsection, a three-component signal with undulatory IFs and additional noise is simulated to verify the proposed method:
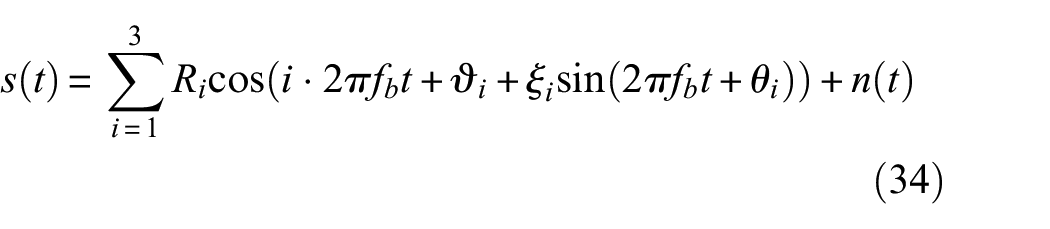
where
Parameters of the simulated signal
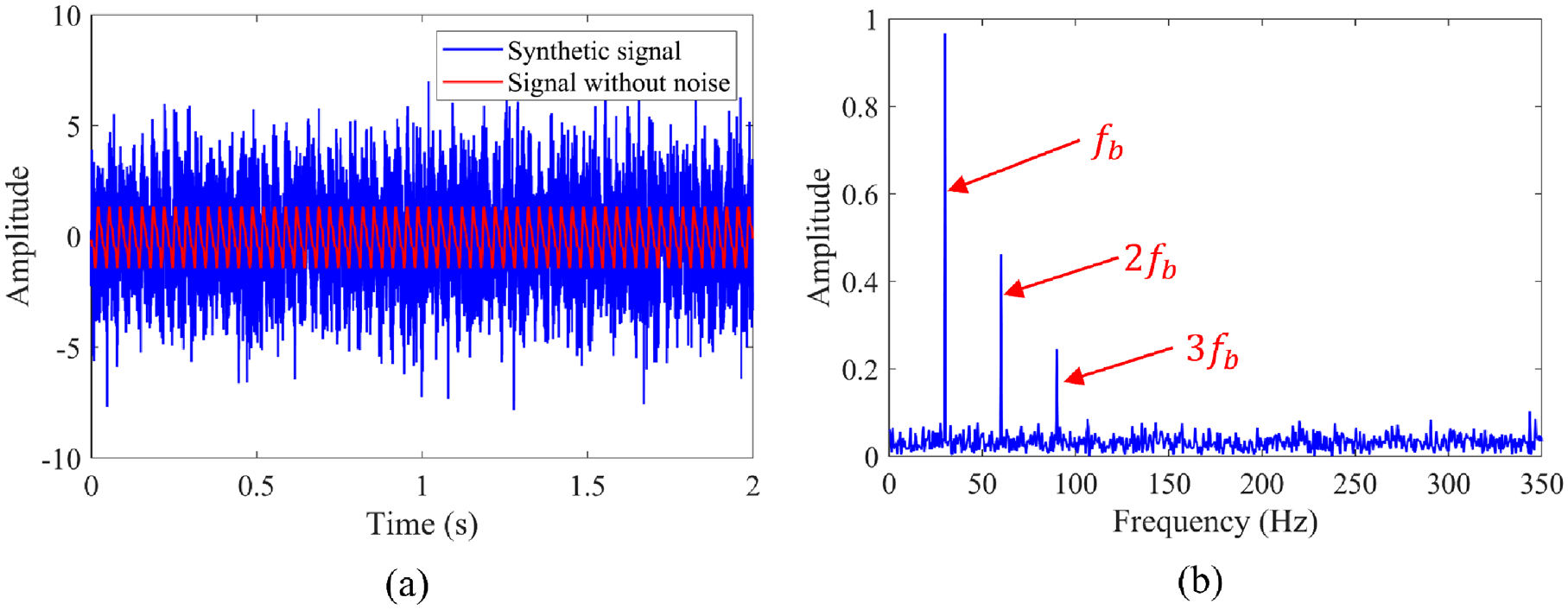
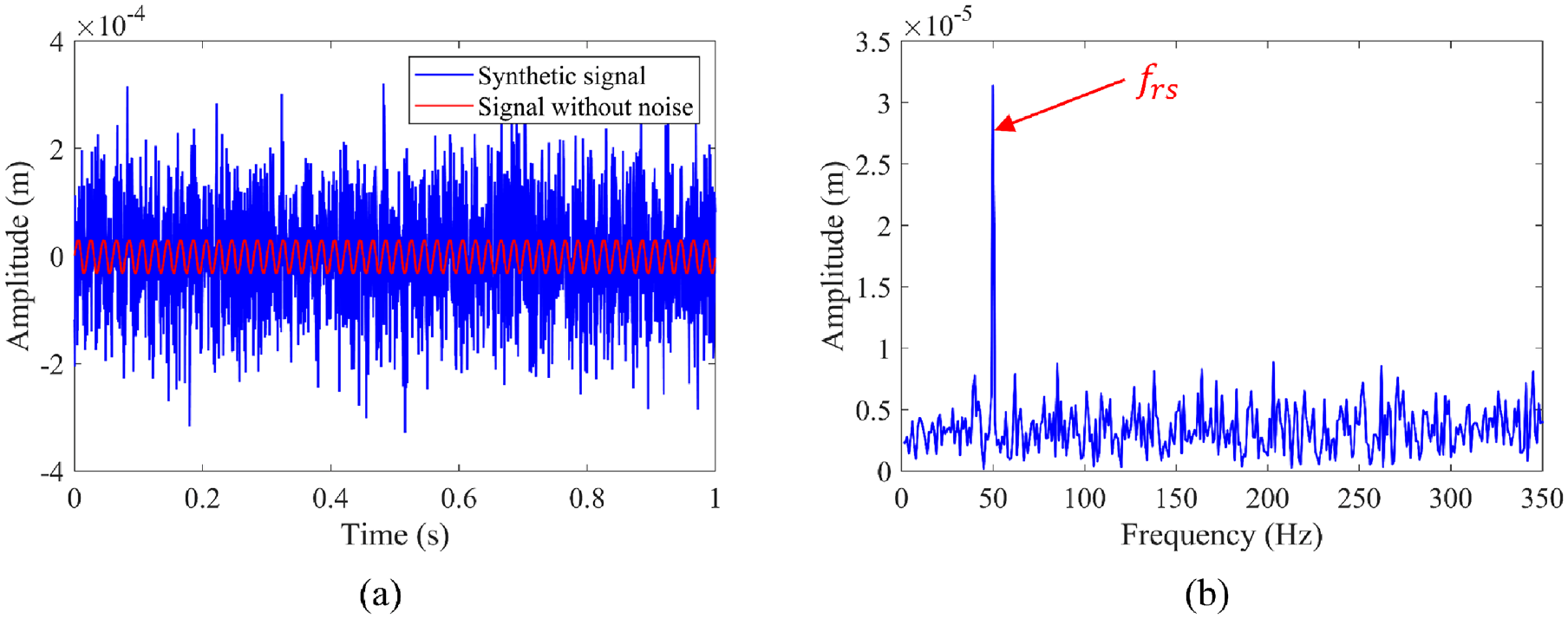
The synthetic multicomponent signal with SNR = −5 dB: (a) time-domain waveform and (b) the Fourier spectrum.
Subsequently, the synthetic multicomponent signal is processed by the proposed method, with the results presented in Figure 7. The TFR of the target component extracted by IVMD is displayed in Figure 7(a), where the subtle intrawave FM around the rotating frequency can be inspected. Then, as displayed in Figure 7(b), the Fourier transform of the estimated IF is conducted, where the rotating frequency and the harmonics from 2× to 5× can be observed. However, there exists strong noise in the spectrum that may interfere with the actual identification. Thereby, the PSO-optimized SR is utilized to enhance the intrawave FM and further suppress the noise, and the Fourier spectrum of the estimated IF after enhancement by OSR is illustrated in Figure 7(c). It can be found that the SNR of the IF component is improved from −13.4 to −4.7 dB, and the target frequency becomes more predominant in the spectrum.
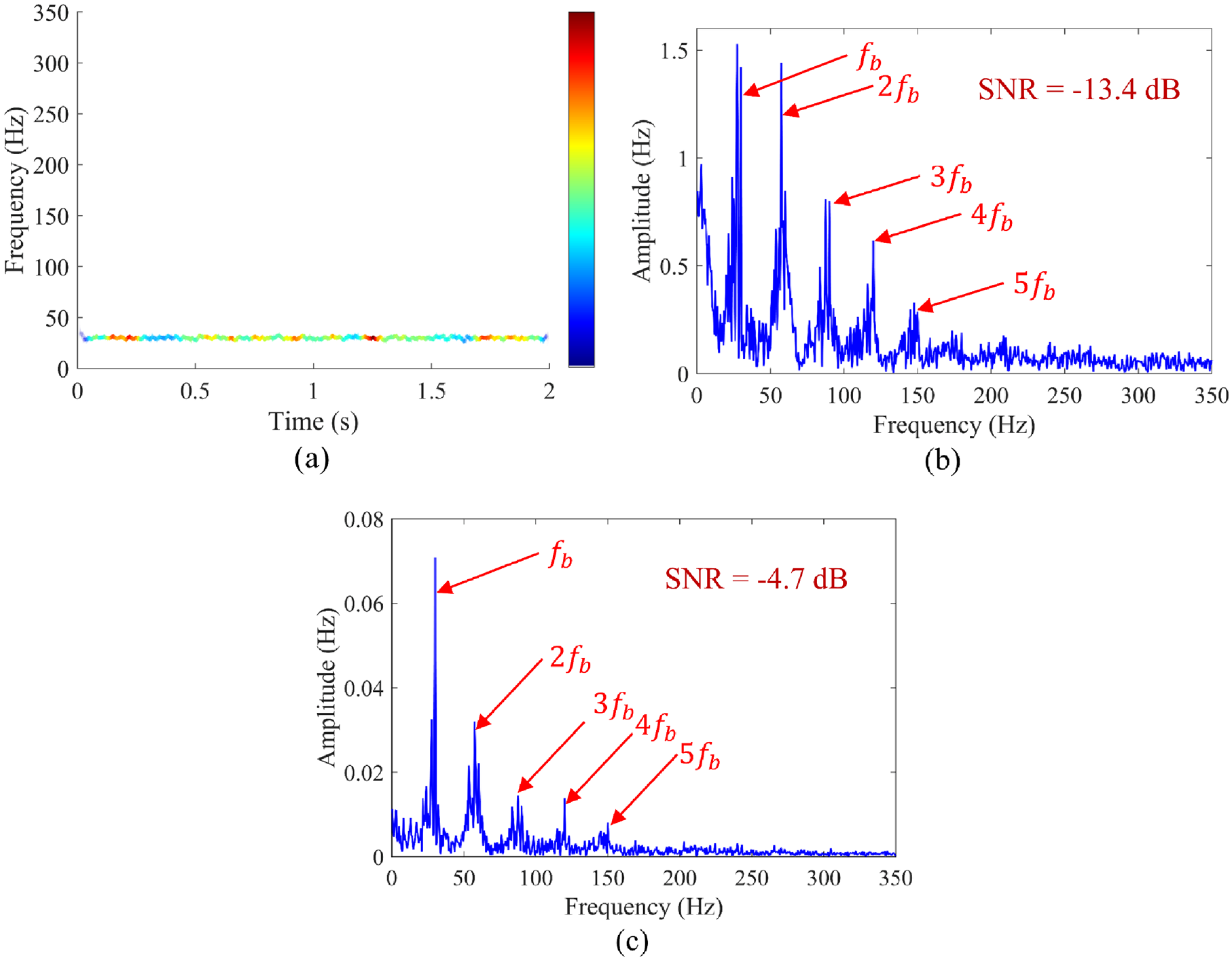
The signal processing results of the proposed approach: (a) TFR of the obtained component via IVMD, (b) Fourier spectrum of the estimated IF, and (c) Fourier spectrum of the estimated IF after enhancement by OSR. IVMD: improved variational mode decomposition; TFR: time-frequency representation; IF: instantaneous frequency; OSR: optimum stochastic resonance.
For comparison, the results of HHT and ACMD are provided in Figure 8. From Figure 8(a), it can be found that HHT fails to reveal the target IF structure of the multicomponent signal with noise. This is because HHT is evolved based upon EMD, and EMD is known to suffer from the problems of mode mixing, recursive sifting, and misclassification caused by fixed band allocation. For ACMD, as mentioned in the study by Chen et al.,
21
both the weighting coefficient and smooth parameter have a significant influence on the smoothness of the excavated signal component as well as its IF, so these two parameters are selected from
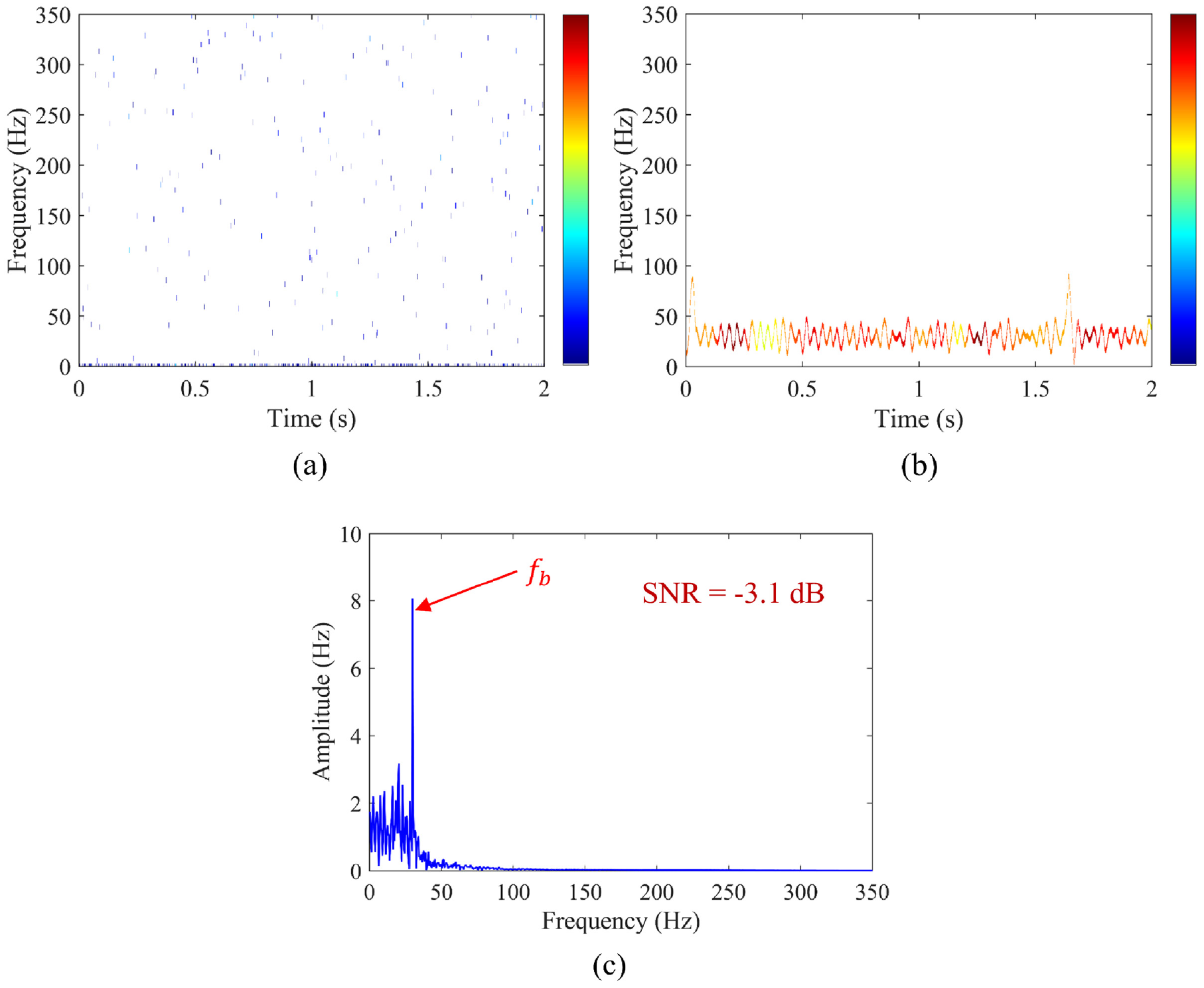
The results of HHT and ACMD: (a) TFR of HHT, (b) TFR of ACMD, and (c) Fourier spectrum of the IF extracted by ACMD.
In order to further study the noise-resistant ability of the proposed method under the circumstance of intense noise contaminating, the simulated signal with SNR of −10 dB is analyzed. As shown in Figure 9(a), the three-component signal is submerged by heavier background noise, and the noise on the spectrum in Figure 9(b) is also more significant. For this synthetic signal, Figure 10 displays the signal processing results of the proposed approach, where the fluctuating pattern of IF can be captured by the proposed IVMD method, as shown in the TFR in Figure 10(a). The Fourier transform of the estimated IF is presented in Figure 10(b). Though there exists the rotating frequency as well as the harmonics, the interference noise on the spectrum is too marked, even interfering with the observation. Moreover, in practical applications, this kind of spectrum is no longer able to support refined identification and diagnosis of rotor rub-impact. Then, the OSR is used to ulteriorly restrain the interference noise and boost the intrawave FM, the Fourier spectrum of whose result is demonstrated in Figure 10(c). The SNR is improved by 10.2 dB after FM enhancement, and the target frequency of
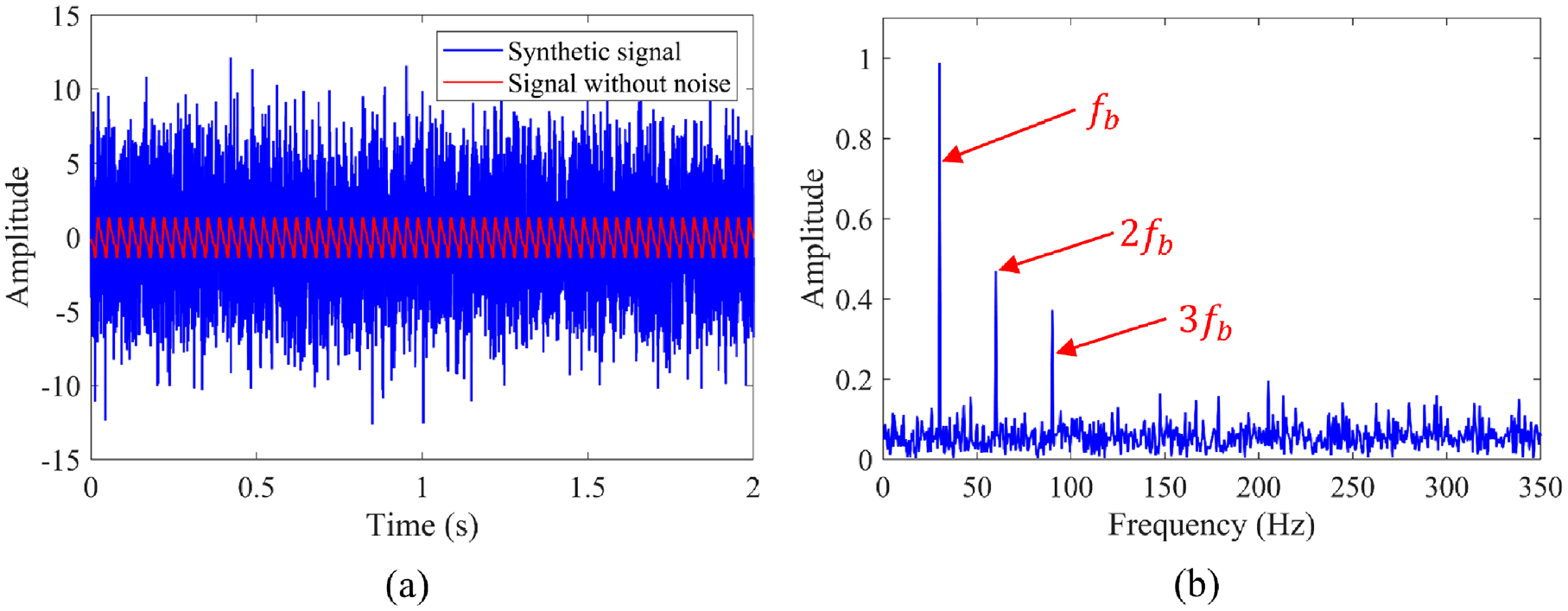
The synthetic multicomponent signal with SNR = −10 dB: (a) time-domain waveform and (b) the Fourier spectrum.
The signal processing results of the proposed approach: (a) TFR of the obtained component via IVMD, (b) Fourier spectrum of the estimated IF, and (c) Fourier spectrum of the estimated IF after enhancement by OSR. IVMD: improved variational mode decomposition; TFR: time-frequency representation; IF: instantaneous frequency; OSR: optimum stochastic resonance.
The results of HHT and ACMD: (a) TFR of HHT, (b) TFR of ACMD, and (c) Fourier spectrum of the IF extracted by ACMD.
Herein, it can be found that the HHT is prone to fail when processing multicomponent signals with noise, which is mainly rooted in the deficiencies of EMD. Although the ACMD is capable to capture the fast varying IF to some extent when the noise level is relatively low, it becomes invalid after the SNR is further reduced, and its performance is inferior to the proposed approach in both cases. As for the proposed approach, the IVMD can effectively extract the target component from noisy multicomponent signals and the OSR is utilized for further noise suppressing and weak IF oscillating characteristic enhancement, which demonstrates superior capacity in faint intrawave FM detection and noise resistance.
Intrawave FM in a rubbing rotor
In this subsection, to validate the availability and robustness of the proposed approach in rotor rubbing detection and diagnostics, simulated signals from numerical simulation are considered. The single-disk Jeffcott rotor model depicted in Figure 12 is adopted to analyze rotor dynamics and rub-impact feature extraction approaches for the rubbing rotor.19,20 As presented in Figure 12(a), the rotor consists of a rigid disk with mass
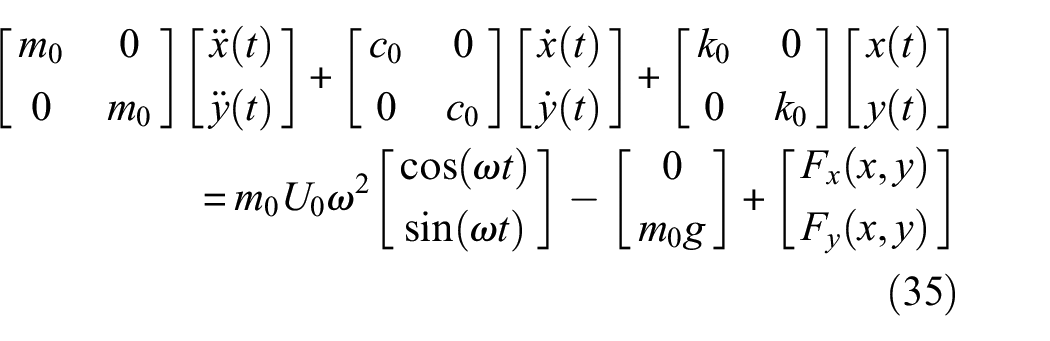
where
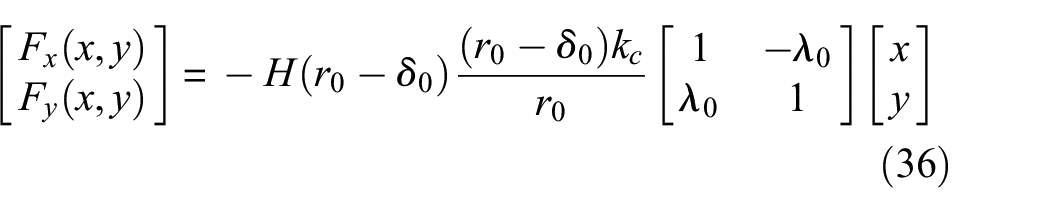
where

The Heaviside function instructs that the rubbing fault of rotor system occurs only when
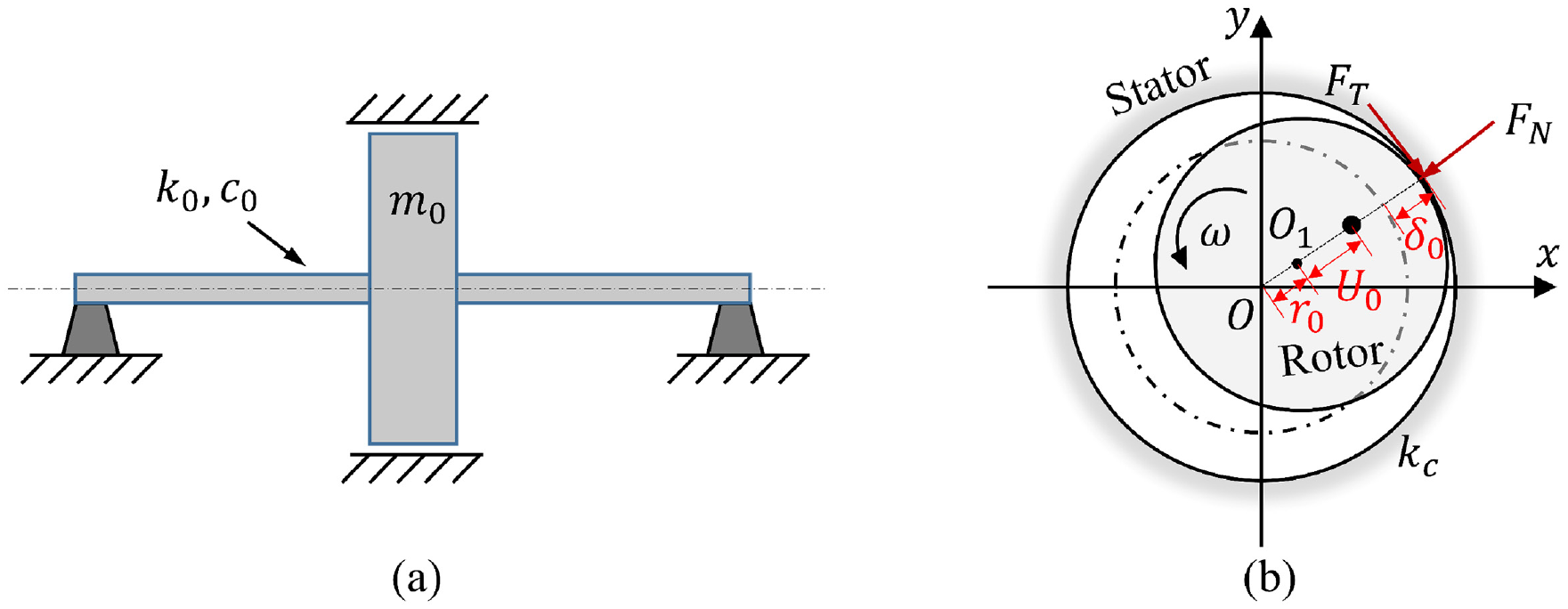
Jeffcott rotor model: (a) sketch of the rotor and (b) schematic diagram of fixed-point rub-impact.
Table 2 presents the relevant parameters of the rotor system, and numerical values of the rotor displacement can be acquired via solving equation (35). Figure 13 displays the time-domain waveform and spectrum of the simulated vibration response, which is sampled at the frequency of 2560 Hz with the length of 1 s. There exist rotating frequency
Emulation parameters of the Jeffcott rotor model.

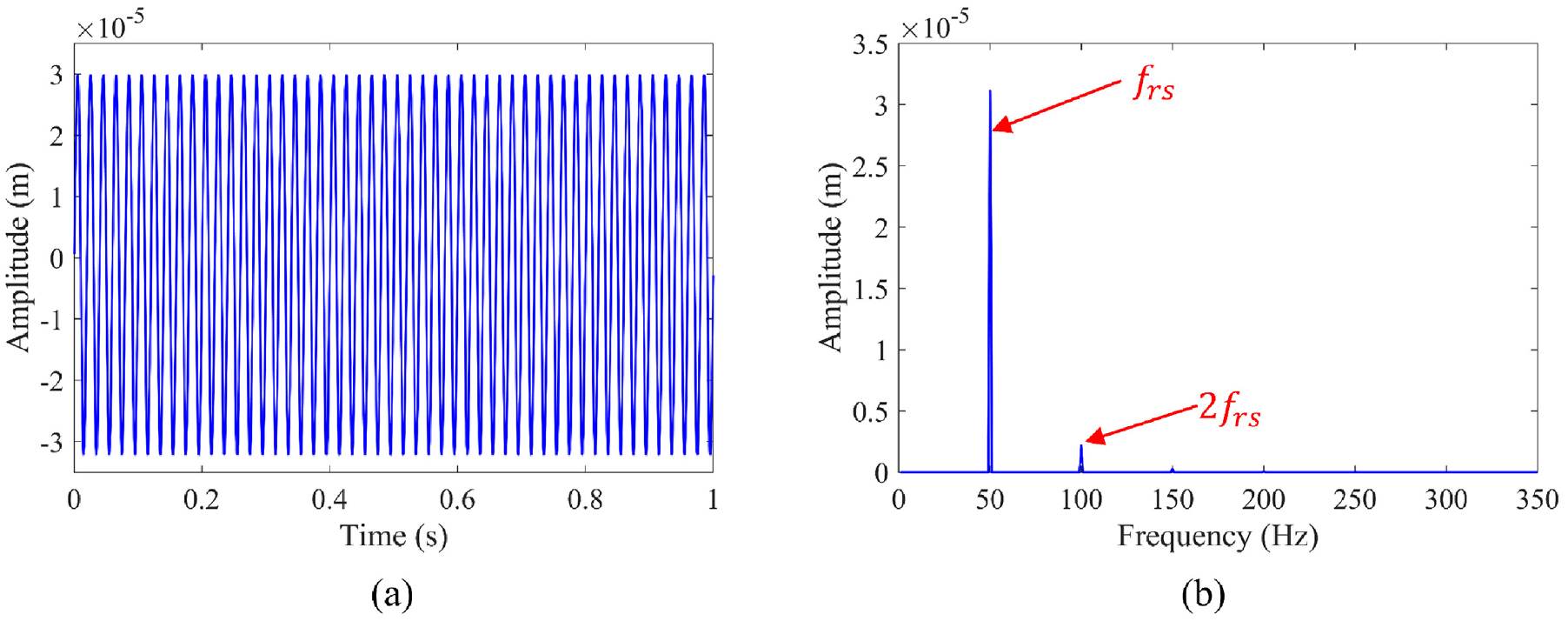
Simulated vibration signal: (a) waveform of vibration response and (b) the Fourier spectrum.
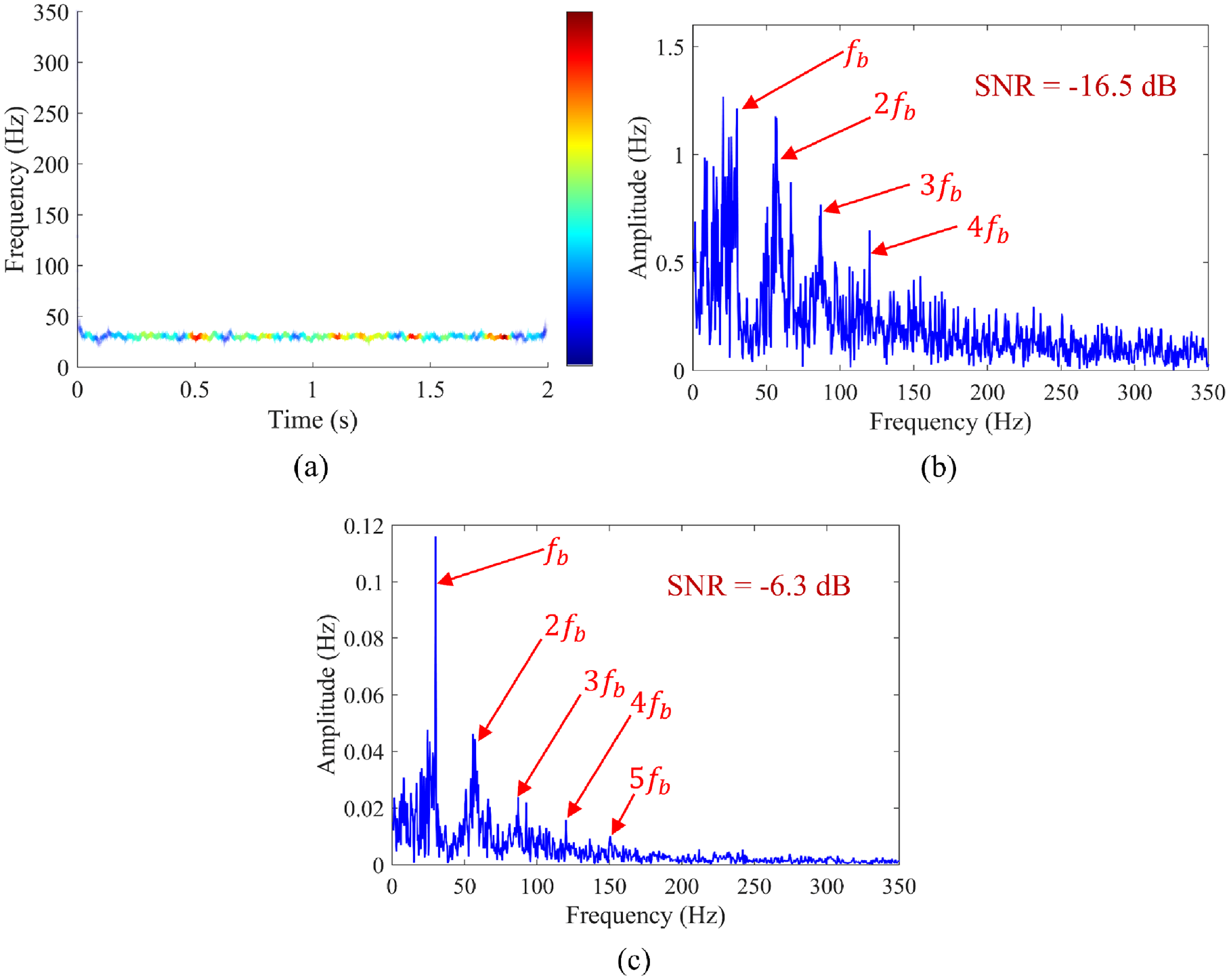
Next, the simulated displacement response is analyzed via the proposed approach. As presented in Figure 14, the IF oscillating around the rotating frequency can be revealed from the TFR, and the target frequency as well as the harmonics can be distinctly observed from the Fourier spectrum of the estimated IF as well as its enhanced version. In this case, the OSR for FM enhancement seems no longer essential due to the high SNR of the simulated signal itself. Similarly, the processing results of the simulated signal by HHT and ACMD are displayed in Figure 15, where the weighting coefficient and smooth parameter of ACMD are selected as
The signal processing results of the proposed approach: (a) TFR of the obtained component via IVMD, (b) Fourier spectrum of the estimated IF, and (c) Fourier spectrum of the estimated IF after enhancement by OSR.
The results of HHT and ACMD: (a) TFR of HHT, (b) Fourier spectrum of the IF extracted by HHT, (c) TFR of ACMD, and (d) Fourier spectrum of the IF extracted by ACMD.
Furthermore, to explore the performance of above approaches in processing the simulated rotor-rubbing-induced signal with heavy noise, the synthetic signal with additional Gaussian white noise is analyzed. The SNR of the synthetic rotor-rubbing-induced signal is simulated to −10 dB, as demonstrated in Figure 16(a), where the rubbing-induced signal is completely submerged in the strong noise. As a result, in Figure 16(b), only the rotating frequency
The synthetic rotor-rubbing-induced signal with SNR = −10 dB: (a) time-domain waveform and (b) Fourier spectrum.
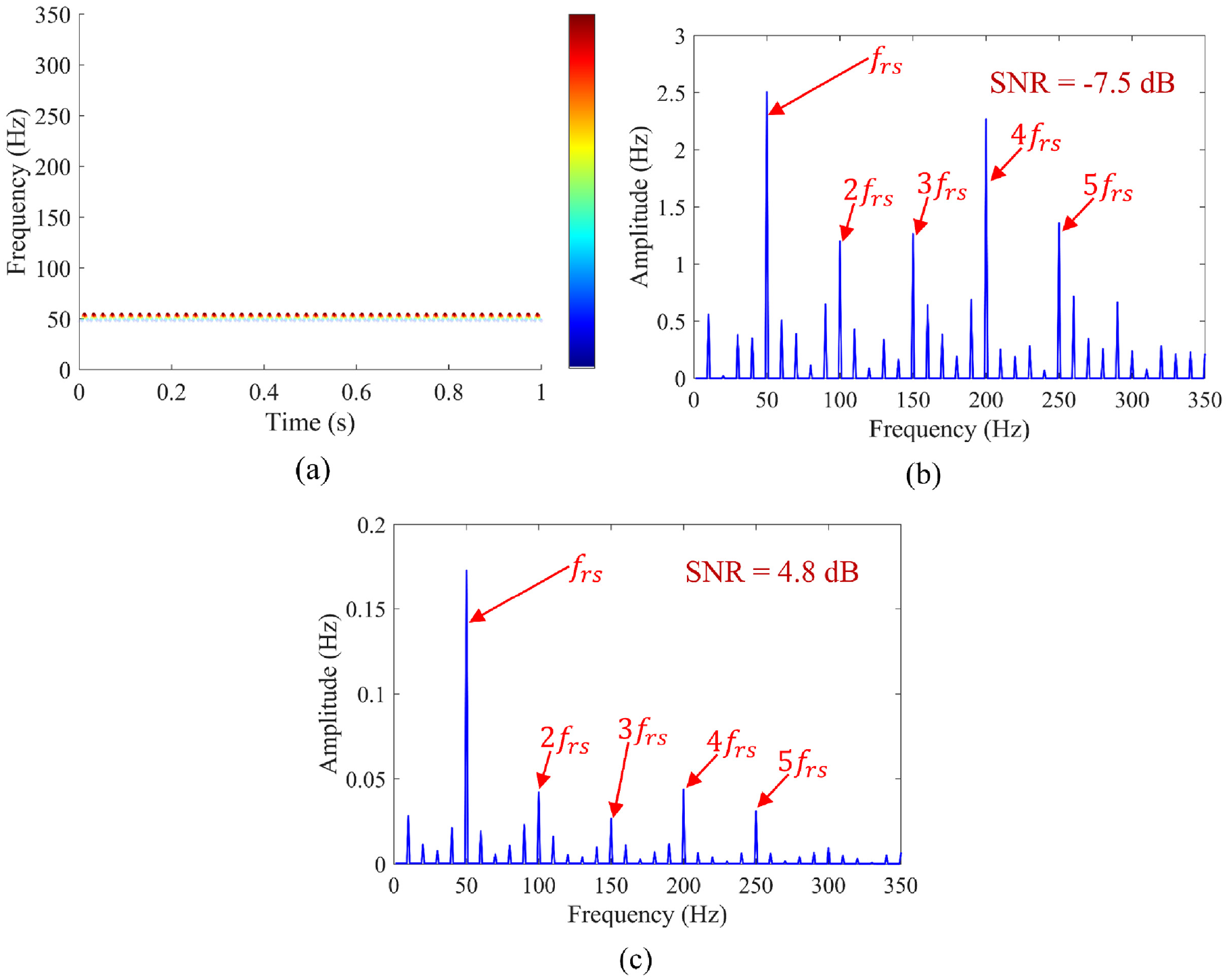
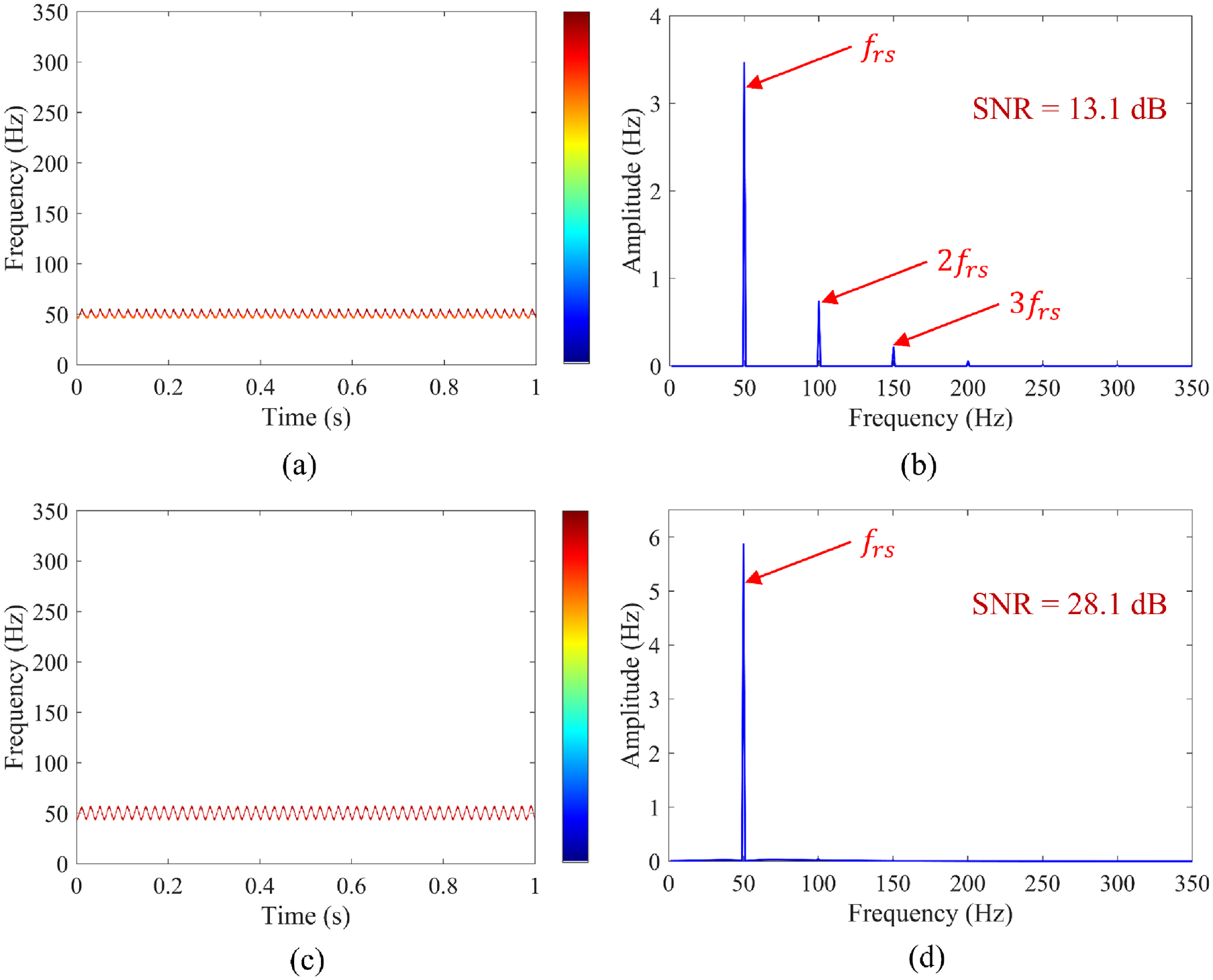
Then, the synthetic signal is analyzed via the proposed approach, and the results are presented in Figure 17. The TFR suggests that the extremely faint intrawave FM characteristic can be extracted to some extent by the proposed IVMD method, as shown in Figure 17(a). As a consequence, in Figure 17(b), though the rotating frequency components can be found in the Fourier spectrum of the estimated IF, there exists interference noise. Additionally, the relative amplitude values of the rotating frequency component and its second harmonic are pernicious to the accurate identification of rotor rub-impact failure in practice, since it may be misclassified as rotor cracking or mechanical looseness, and so on. Hence, the PSO-optimized SR method is adopted for FM characteristic enhancement and noise suppressing, as showcased in Figure 17(c), where the target frequency of the fast oscillating IF can be extracted more distinctly, with the SNR being improved from −23.2 to −12.9 dB, and the refined identification of rotor rub-impact can be attained.
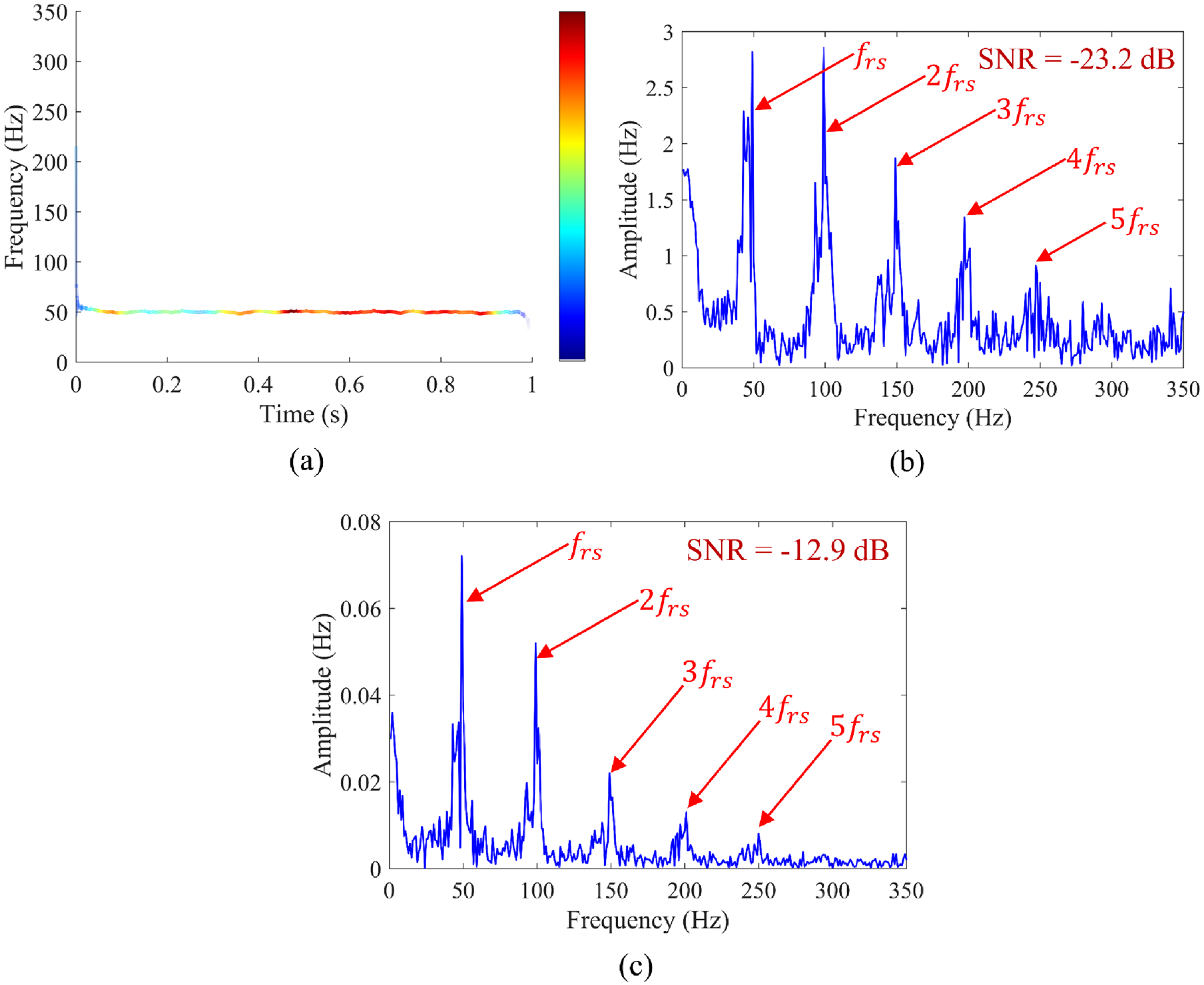
The signal processing results of the proposed approach: (a) TFR of the obtained component via IVMD, (b) Fourier spectrum of the estimated IF, and (c) Fourier spectrum of the estimated IF after enhancement by OSR.
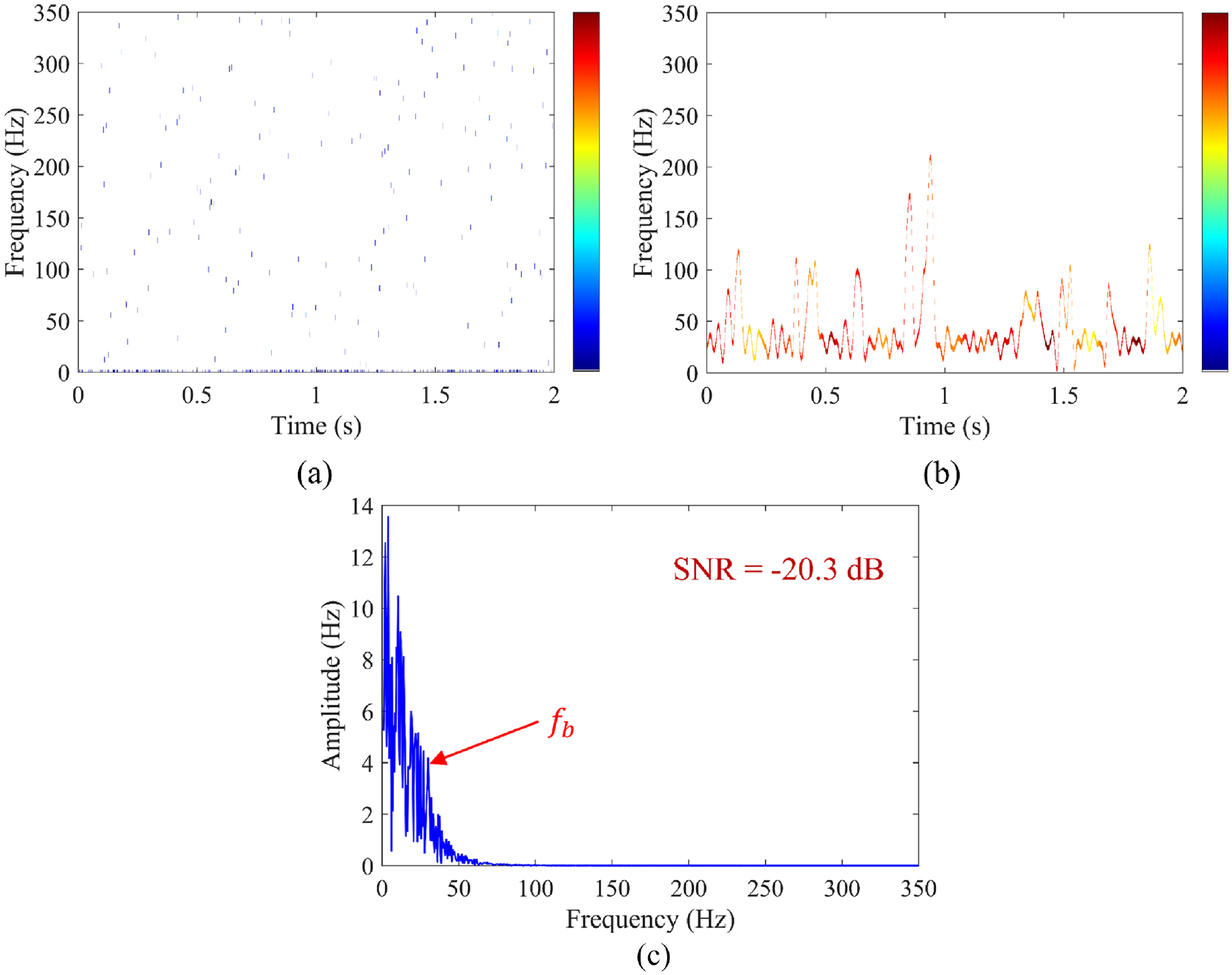
The comparison results of HHT and ACMD are presented in Figure 18, and it demonstrates that the HHT is unable to deal with the noisy signal by reason of its inherent shortcomings. For ACMD, the weighting coefficient and smooth parameter are adjusted to
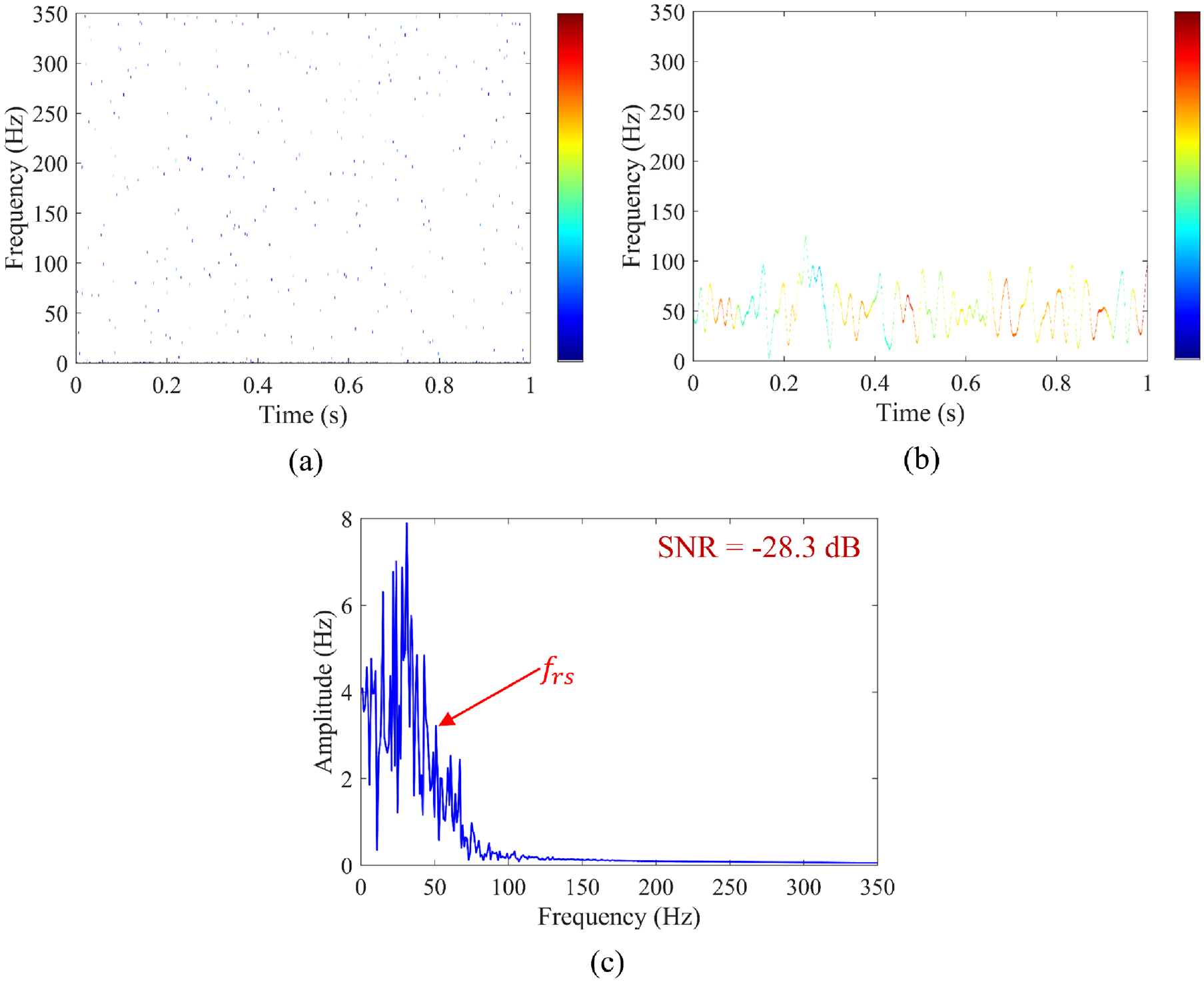
The results of HHT and ACMD: (a) TFR of HHT, (b) TFR of ACMD, and (c) Fourier spectrum of the IF extracted by ACMD.
Experimental investigations on rotor rubbing data from a rotor system test rig
In this section, experimental data from a real-world rotor system test rig are considered to ulteriorly evaluate the practicability and preponderance of the entire proposed approach in rotor rub-impact diagnosis comprehensively, with the two-stage integration strategy being implemented. In likewise, TFA methods of HHT and ACMD are adopted for comparison, by analyzing the displacement signals after conversion.
As demonstrated in Figure 19, the rotor system test rig is mainly composed of a servo motor, a coupling, a shaft, a rub-impact rod, and two bearings, with five B&K accelerometers for vibration data acquisition. During the experiment, the rub-impact rod can be adjusted manually for a desired degree of rotor rubbing and secured with the locknut to keep the stable rubbing process. Vibration acceleration signals collected by accelerometer #2 are analyzed in this study, with the sampling frequency of 50 kHz and sampling time of 1 s.
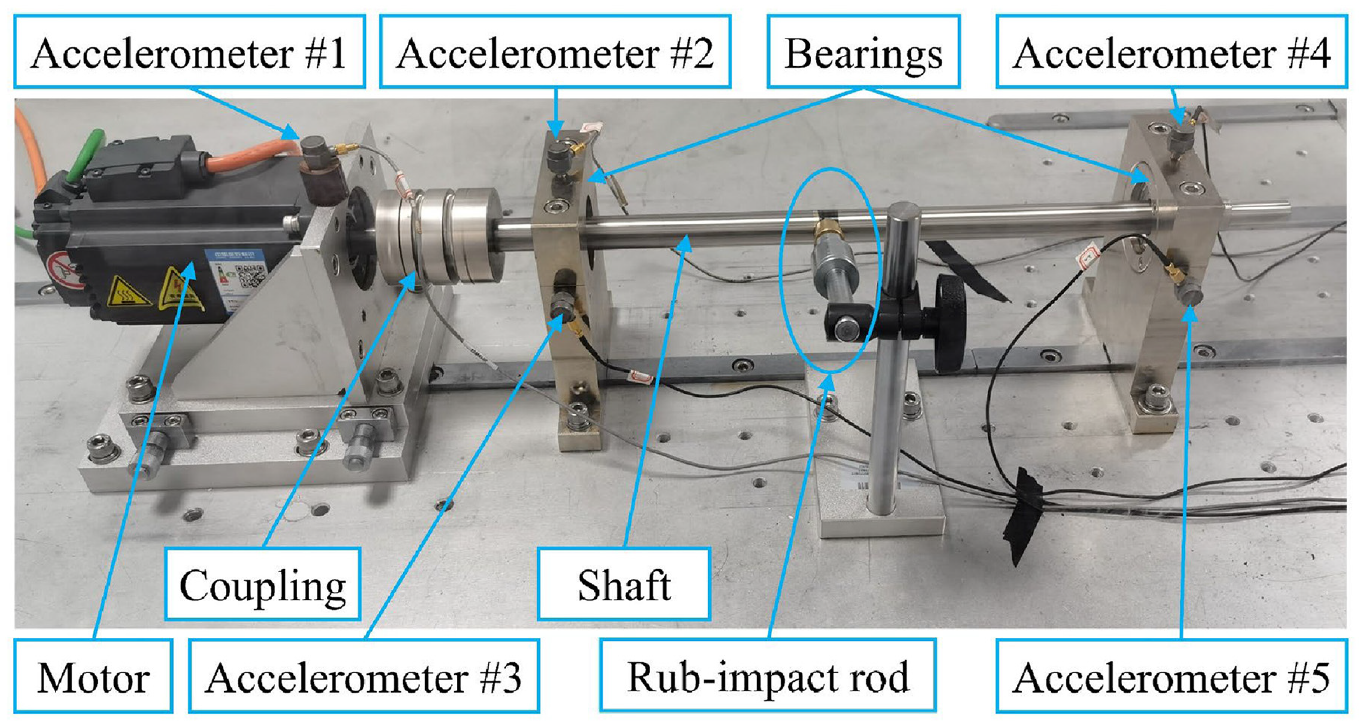
Experiment setup of the rotor system test stand.
Rotor rub-impact diagnosis under the shaft speed of 2000 rpm
First, the vibratory signal collected under the normal condition of the rotor system (without rubbing) is taken as the baseline data for analysis, where the rotating speed of the motor was set to 2000 rpm. The acquired acceleration signal is presented in Figure 20(a), and the proposed two-stage integration strategy is executed on it, with the cutoff frequencies set as 24 Hz, which is found to be effective and robust in eliminating the low-frequency noise components in practice. It should be noted that in the following contents, the cutoff frequencies are set to 24 Hz by default if there is no special explanation. The integration result and the Fourier spectrum of the displacement signal are, respectively, displayed in Figure 20(b) and (c). From the spectrum, it can be found that there exists the prominent rotating-speed-related frequency component, and the harmonic components are very inconspicuous, with the noise level being relatively low. Then, the displacement signal is processed by the proposed method, and the TFR of IVMD is demonstrated in Figure 21(a), from which it can be found that the estimated IF is almost a straight line at the rotating frequency
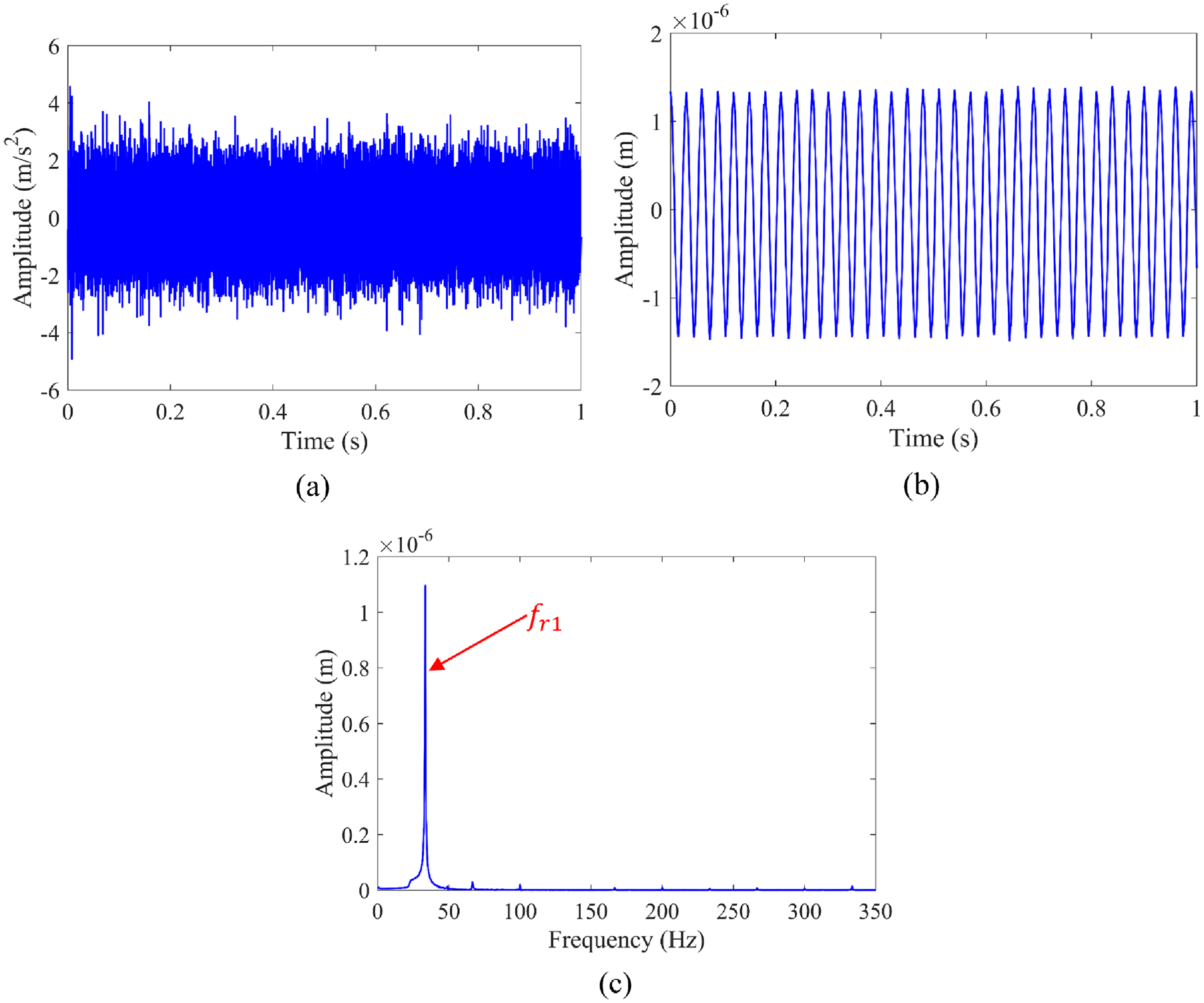
Vibratory signal acquired under the normal condition at the shaft speed of 2000 rpm: (a) time-domain waveform of the acceleration signal, (b) time-domain waveform of the converted displacement signal, and (c) Fourier spectrum of the displacement signal.
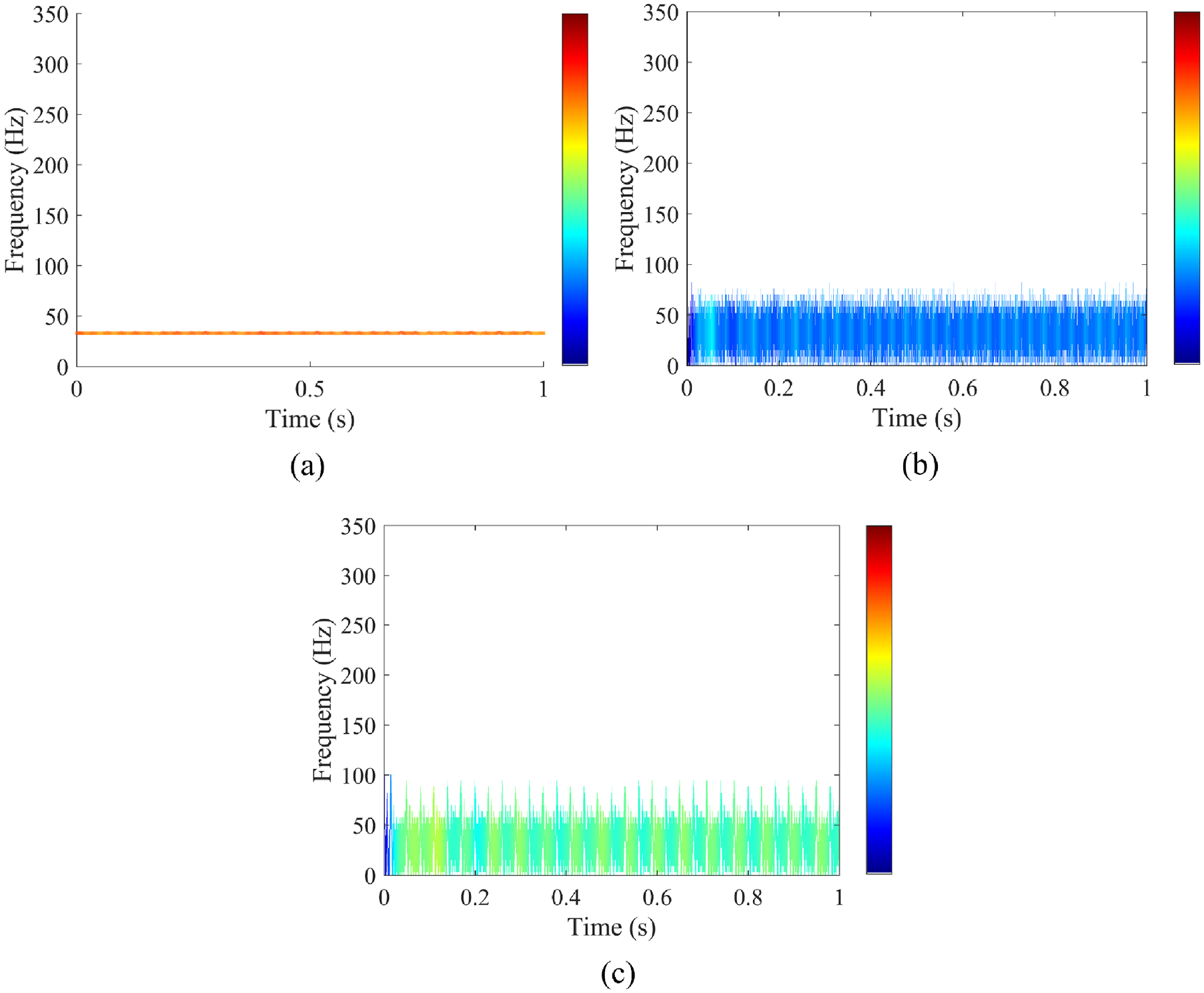
The TFA results: (a) TFR of IVMD, (b) TFR of HHT, and (c) TFR of ACMD.
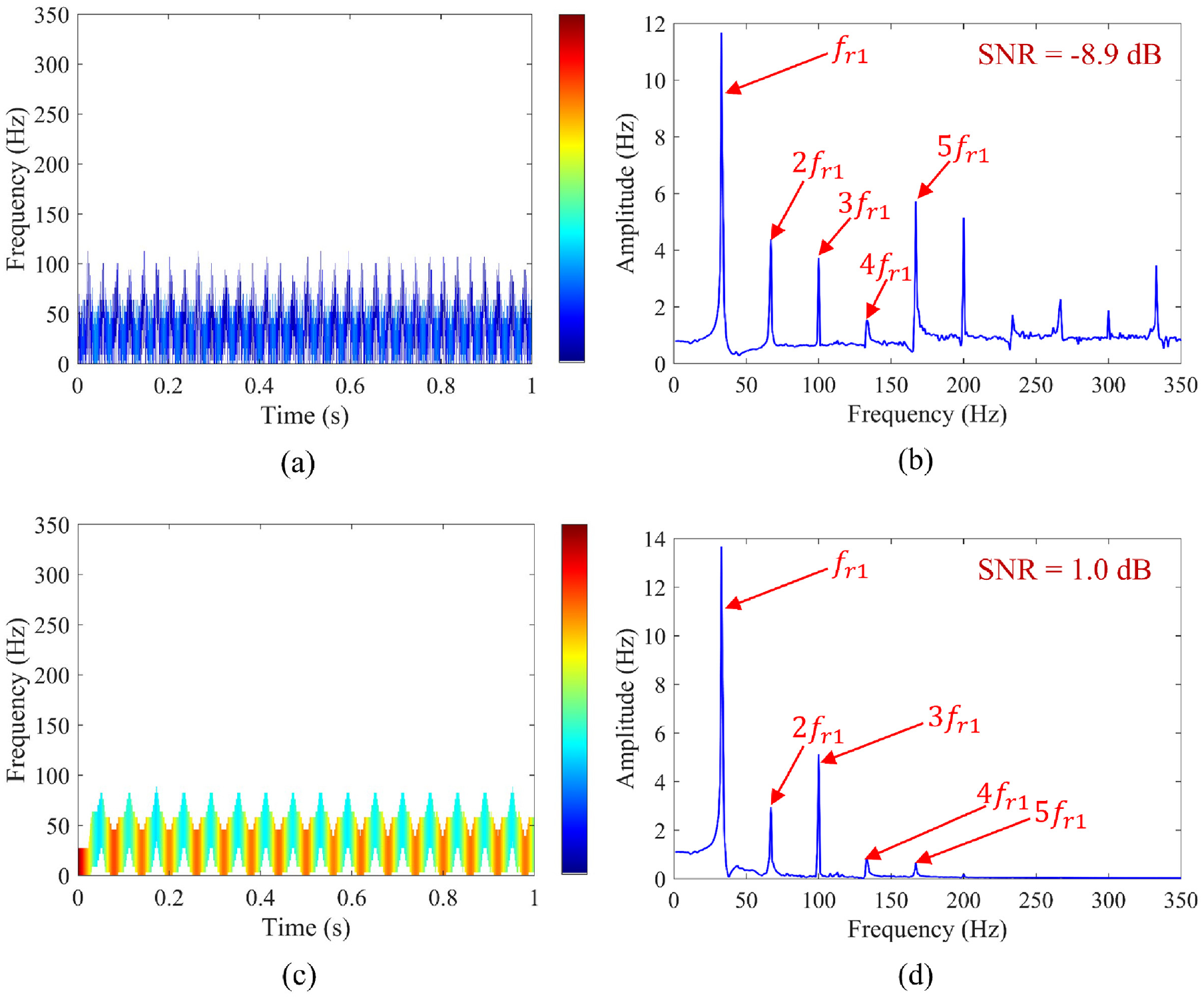
Next, the rub-impact rod is adjusted for a desired degree of rotor rubbing, and the acquired signal is analyzed, as showcased in Figure 22(a), from which it can be seen that there exist some impact components in the acceleration signal caused by rotor rub-impact failure. The displacement signal after two-stage integration is presented in Figure 22(b), and its Fourier spectrum is displayed in Figure 22(c), with the rotating frequency component being the most apparent and its harmonics being nonsignificant. TFR of the target component obtained via the proposed IVMD is presented in Figure 23(a), where the IF fast oscillating around the rotating frequency can be observed plainly. Figure 23(b) illustrates the Fourier spectrum of the estimated IF with SNR of −8.9 dB, and the rub-induced frequency at
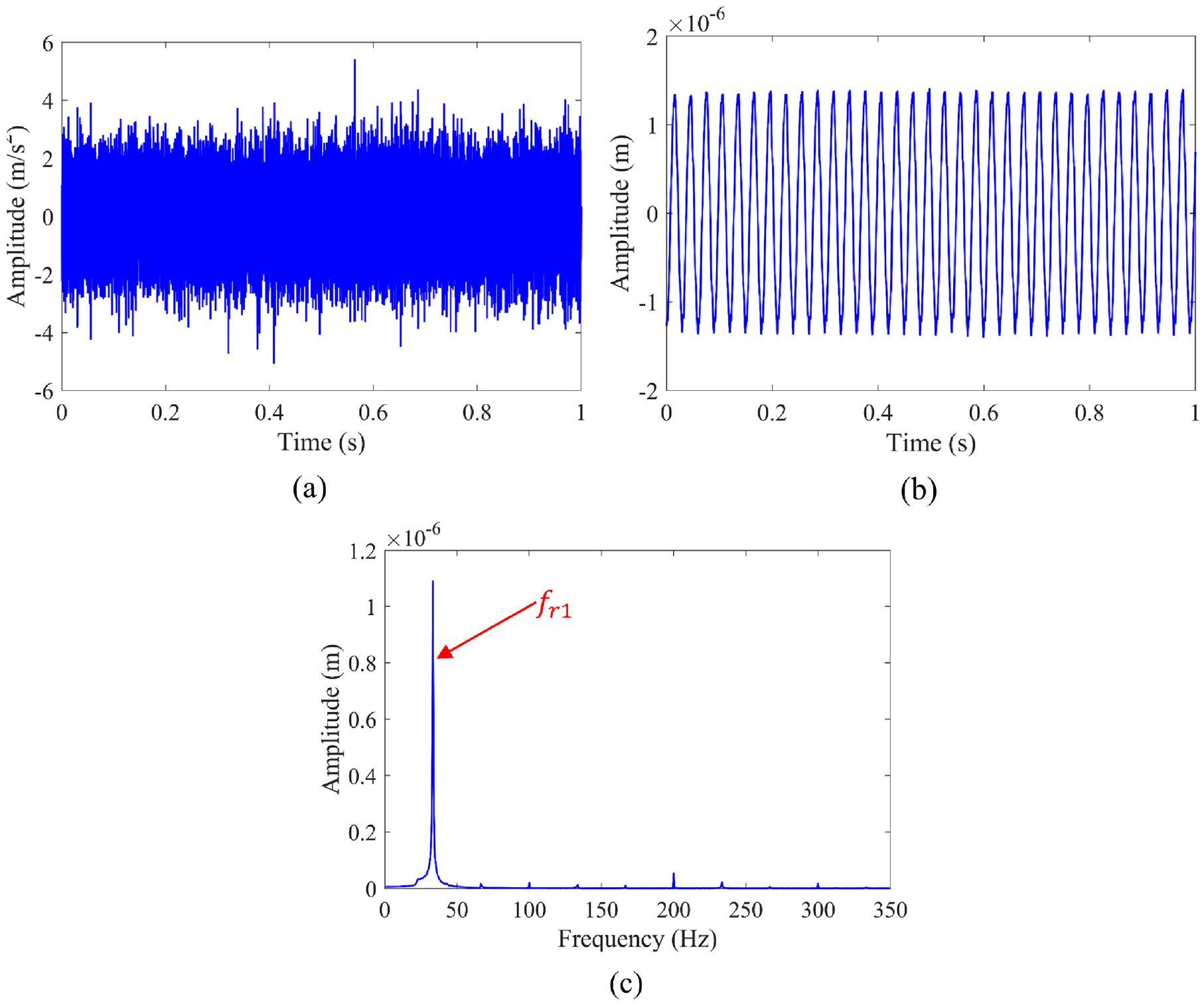
Vibratory signal acquired under the rubbing condition at the shaft speed of 2000 rpm: (a) time-domain waveform of the acceleration signal, (b) time-domain waveform of the converted displacement signal, and (c) Fourier spectrum of the displacement signal.
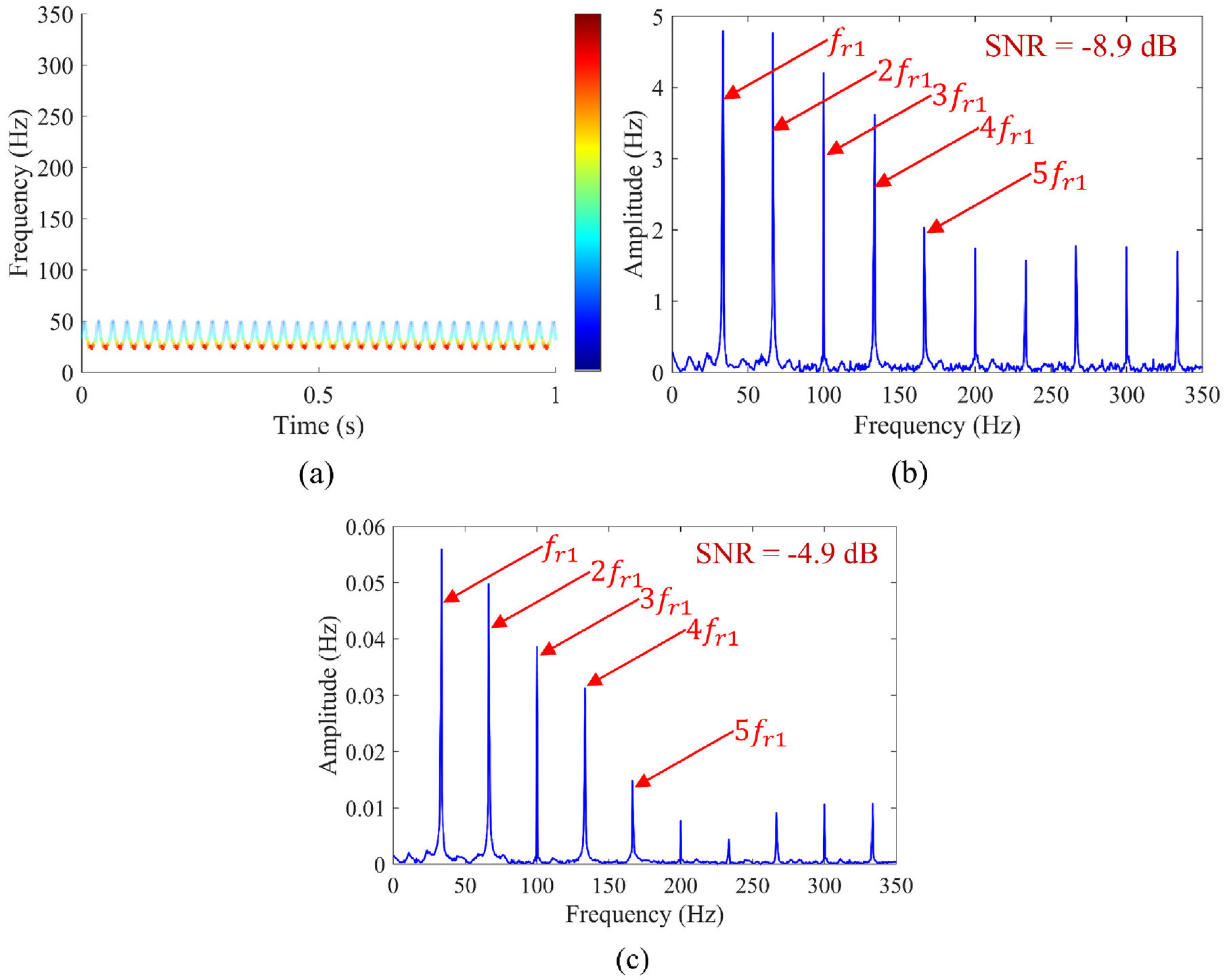
The signal processing results of the proposed approach: (a) TFR of the obtained component via IVMD, (b) Fourier spectrum of the estimated IF, and (c) Fourier spectrum of the estimated IF after enhancement by OSR. IVMD: improved variational mode decomposition; TFR: time-frequency representation; IF: instantaneous frequency; OSR: optimum stochastic resonance.
The results of HHT and ACMD: (a) TFR of HHT, (b) Fourier spectrum of the IF extracted by HHT, (c) TFR of ACMD, and (d) Fourier spectrum of the IF extracted by ACMD.
Rotor rub-impact diagnosis under the shaft speed of 5000 rpm
Subsequently, the shaft rotating speed was set as 5000 rpm, and the vibratory signal collected under the normal condition is analyzed at first. As shown in Figure 25(a), the amplitude of the acceleration signal at 5000 rpm is increased impressively compared to Figures 20(a) and 22(a), and there exist many pulses even though the rotor system is fault-free. The converted displacement signal is displayed in Figure 25(b) and the Fourier spectrum is presented in Figure 25(c), from which it can be observed that in addition to the rotating frequency
Vibratory signal acquired under the normal condition at the shaft speed of 5000 rpm: (a) time-domain waveform of the acceleration signal, (b) time-domain waveform of the converted displacement signal, and (c) Fourier spectrum of the displacement signal.
The TFA results: (a) TFR of IVMD, (b) TFR of HHT, and (c) TFR of ACMD.
Afterward, the vibration acceleration signal collected under the rubbing condition at the shaft speed of 5000 rpm is adopted for analysis, which is shown in Figure 27(a), from which it can be seen that both the amplitude and impulses of the acceleration signal increase significantly in the case of rotor rubbing. The displacement signal after two-stage integration is presented in Figure 27(b), from which several nonstationary impacts can be observed. From the Fourier spectrum of the displacement signal shown in Figure 27(c), there exist the rotating frequency
Vibratory signal acquired under the rubbing condition at the shaft speed of 5000 rpm: (a) time-domain waveform of the acceleration signal, (b) time-domain waveform of the converted displacement signal, and (c) Fourier spectrum of the displacement signal.
The signal processing results of the proposed approach: (a) TFR of the obtained component via IVMD, (b) Fourier spectrum of the estimated IF, and (c) Fourier spectrum of the estimated IF after enhancement by OSR. IVMD: improved variational mode decomposition; TFR: time-frequency representation; IF: instantaneous frequency; OSR: optimum stochastic resonance.
The results of HHT and ACMD: (a) TFR of HHT, (b) TFR of ACMD, and (c) Fourier spectrum of the IF extracted by ACMD.
Application in centrifugal pump rubbing detection
In this section, vibratory signals acquired from a centrifugal pump test platform are utilized for analysis. As showcased in Figure 30(a), the induction motor drives the centrifugal pump through a flexible coupling, and the fluid is sucked in from the inlet and discharged from the outlet. During the test, the motor speed was set to 1500 rpm. For the centrifugal pump utilized in this experimentation, its impeller was manufactured by three-dimensional printing (as shown in Figure 30(b)), and the number of blades was five. Two wireless vibratory sensors were installed at the induction motor and the bearing pedestal of the centrifugal pump, respectively, to perform condition monitoring and signal acquisition, with the sampling frequency of 5120 Hz. Vibration acceleration signals acquired by wireless sensor #1 are analyzed in this study, and the sampling time is 2 s for each signal.
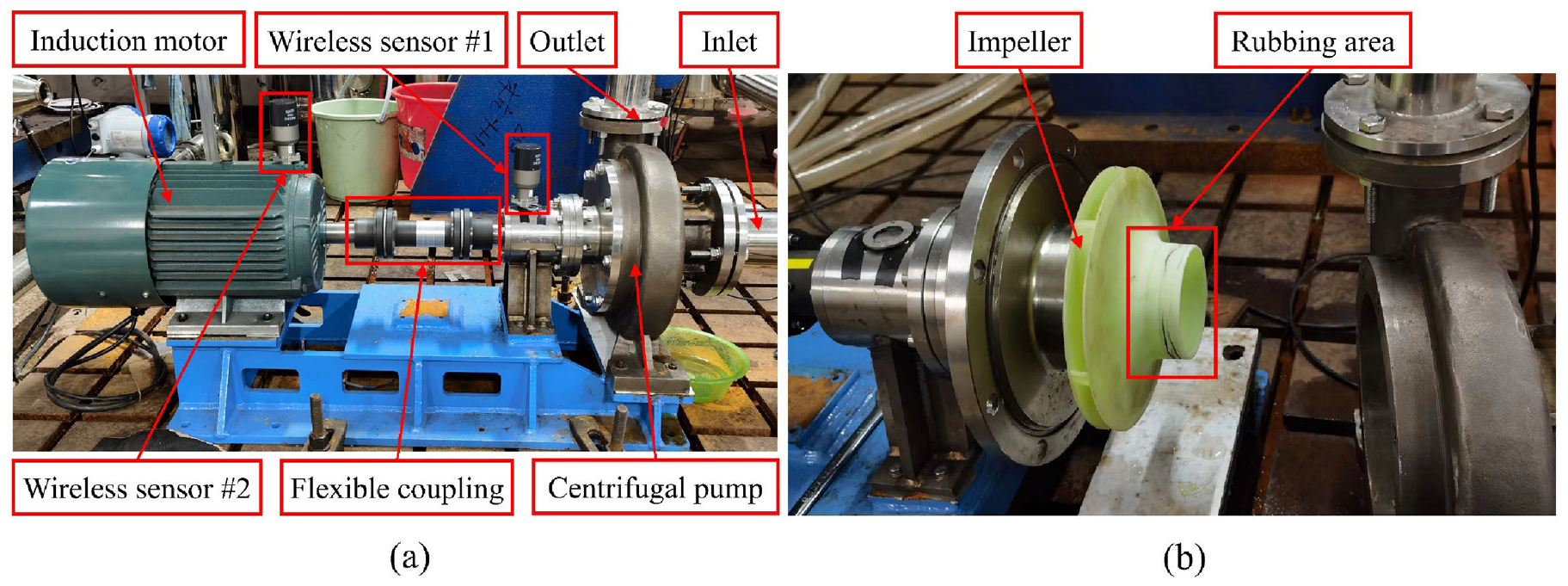
The centrifugal pump test platform for rotor rubbing simulation: (a) overview of the test stand and (b) the rotatable part suffered from rub-impact.
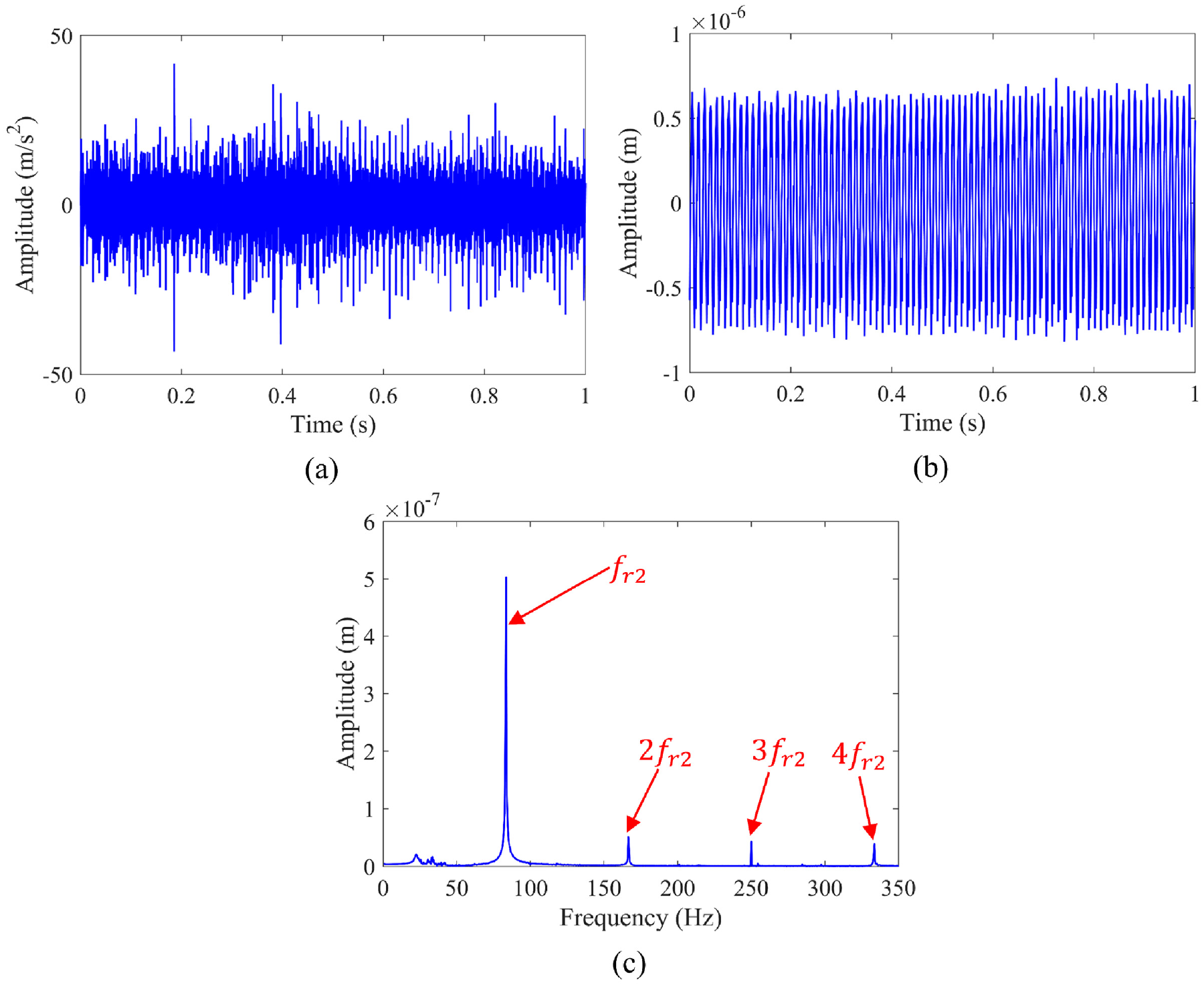
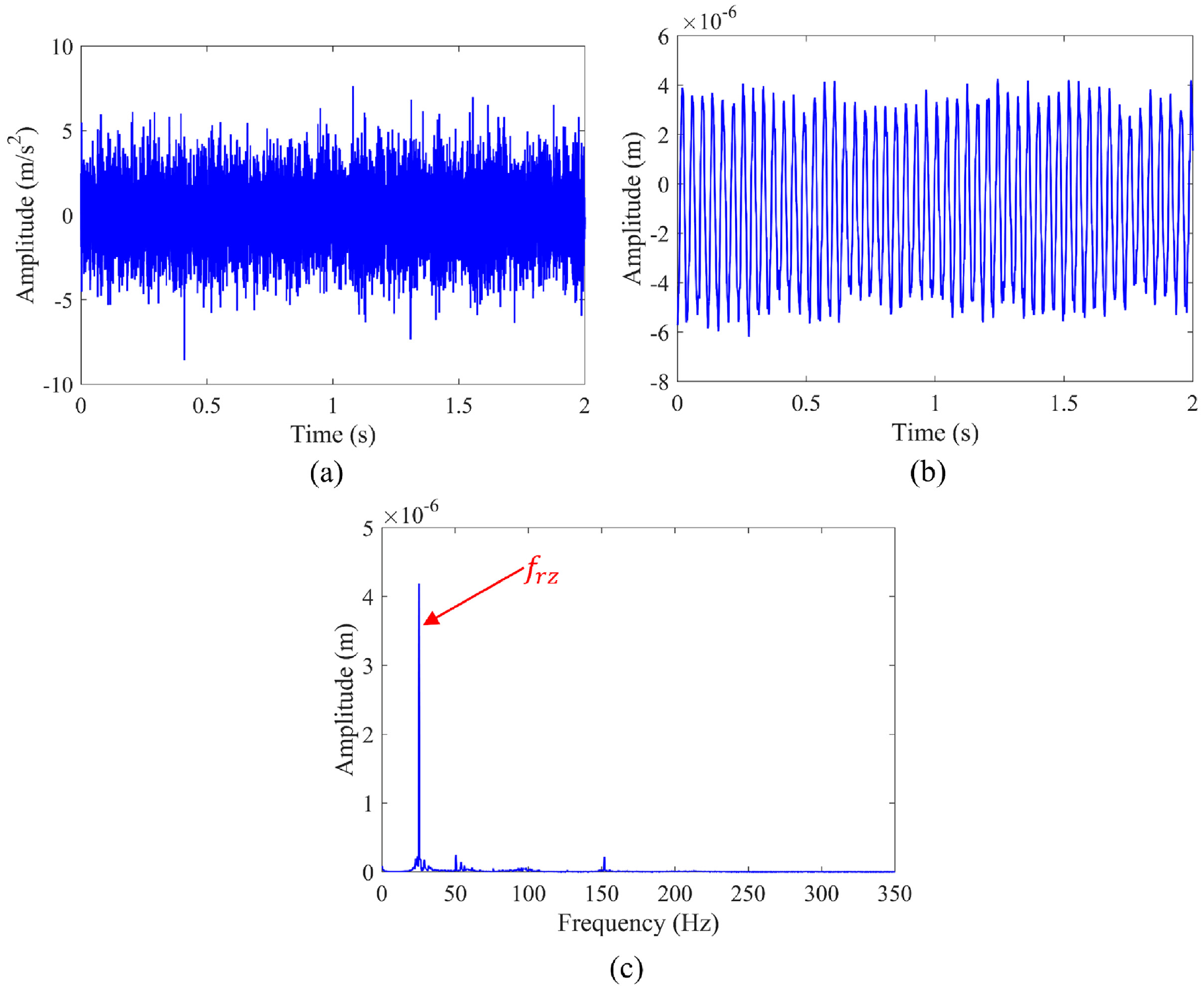
To start with, the vibration acceleration signal collected under rubbing-free condition of the centrifugal pump is processed, as shown in Figure 31(a). Time waveform of the converted displacement signal via the two-stage integration strategy is depicted in Figure 31(b), and its Fourier spectrum is presented in Figure 31(c), from which it can be observed that there are two predominant peaks corresponding to the rotating frequency
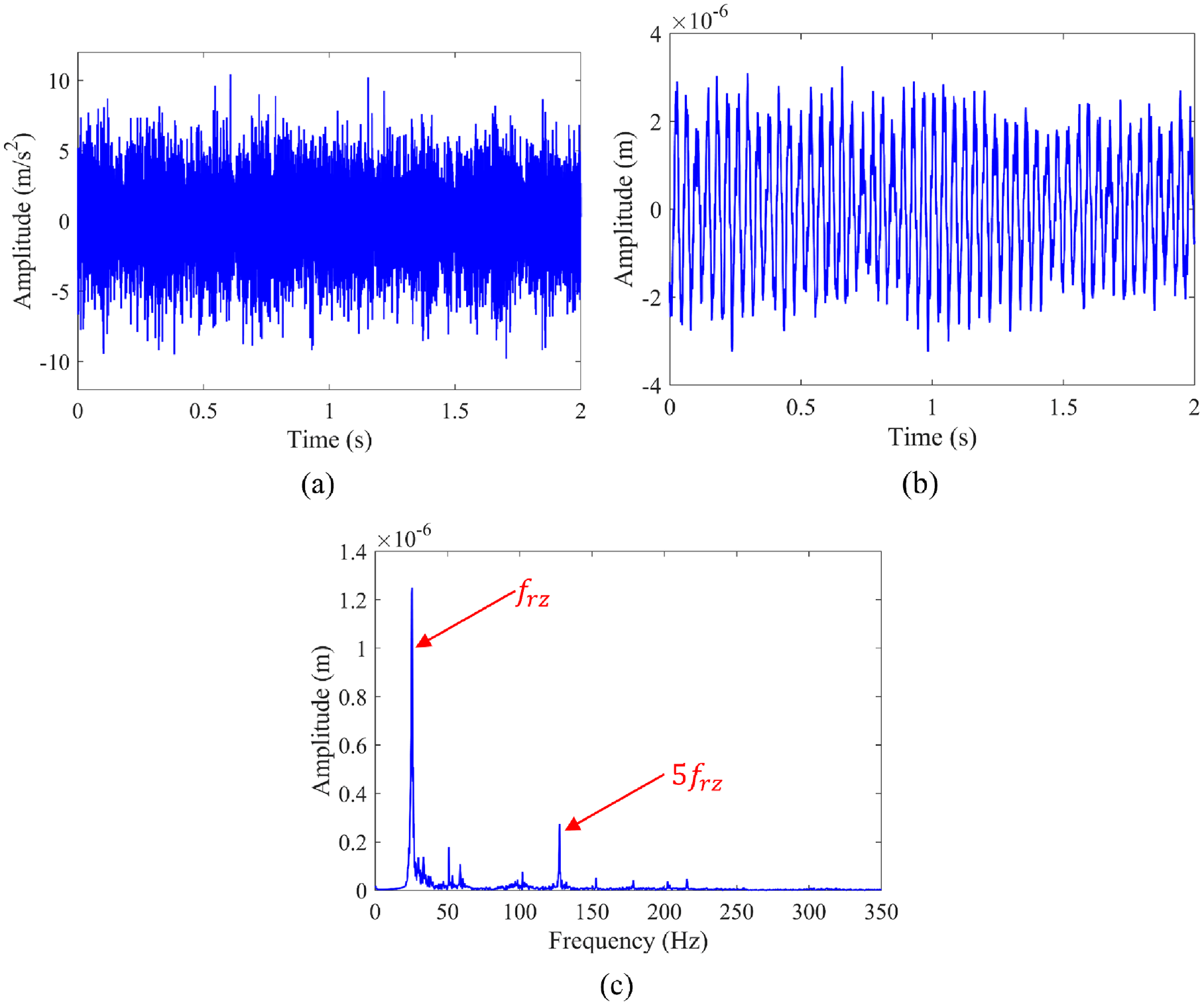
Vibratory signal acquired under the rubbing-free condition: (a) time-domain waveform of the acceleration signal, (b) time-domain waveform of the converted displacement signal, and (c) Fourier spectrum of the displacement signal.
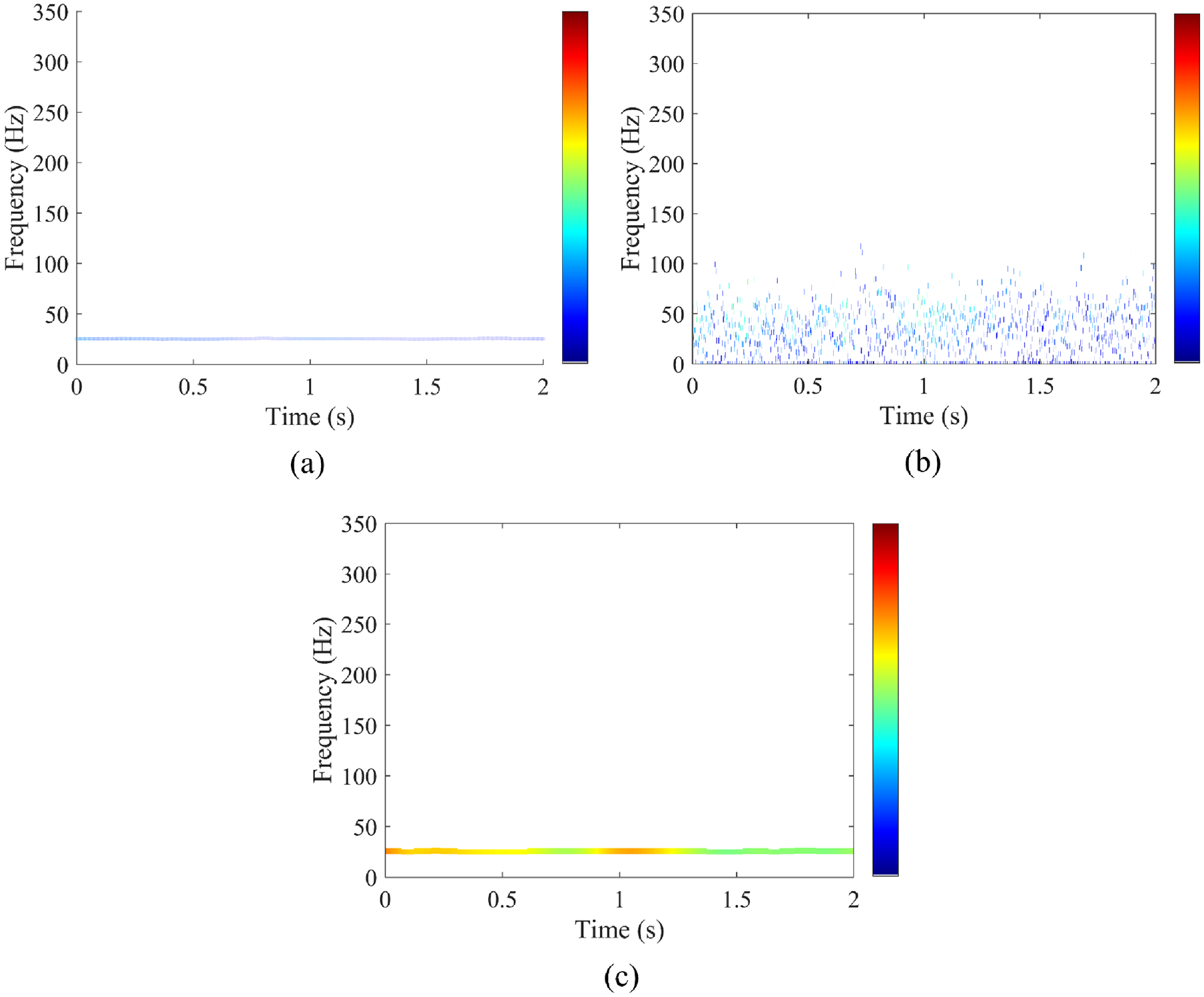
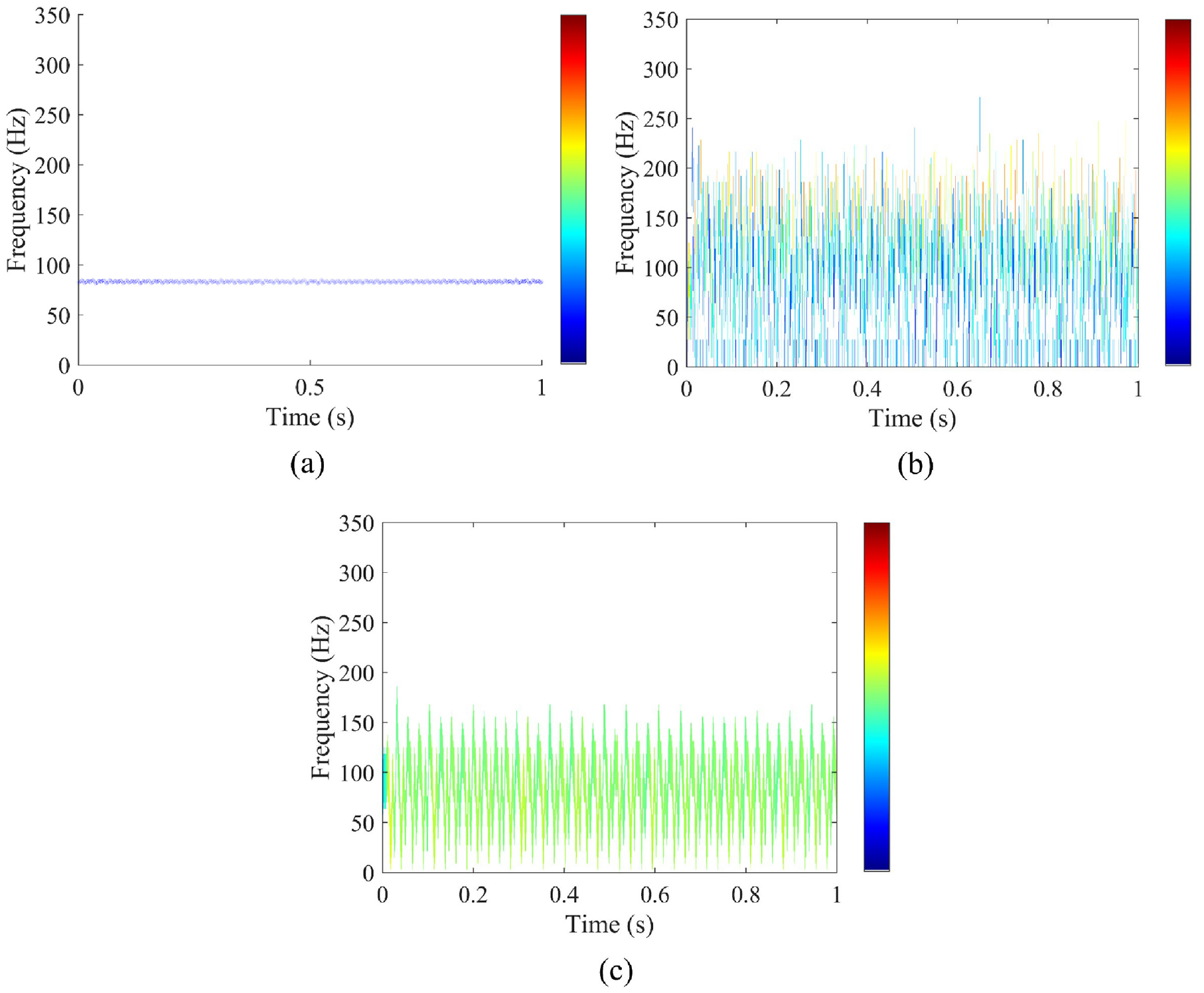
The TFA results: (a) TFR of IVMD, (b) TFR of HHT, and (c) TFR of ACMD.
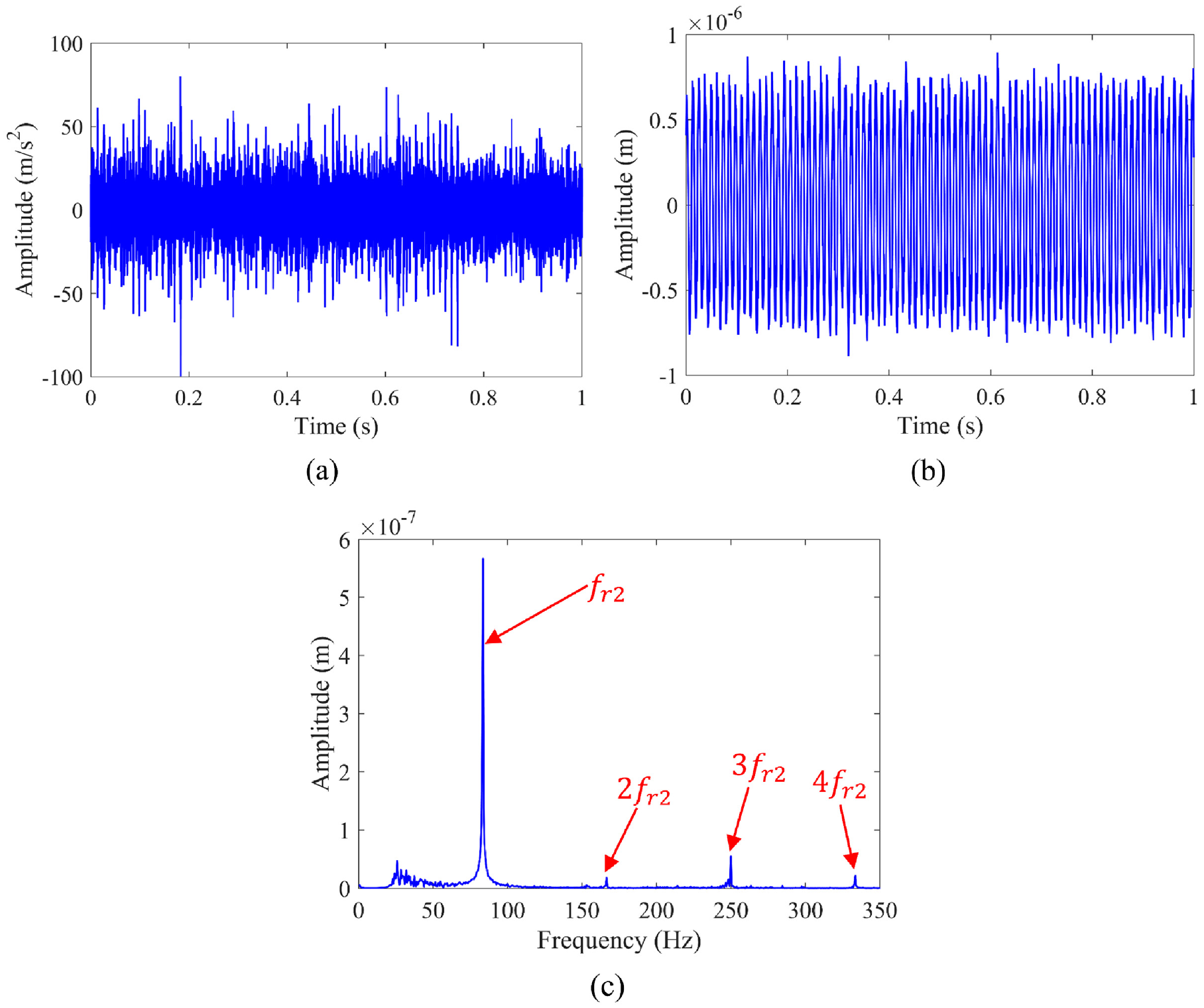
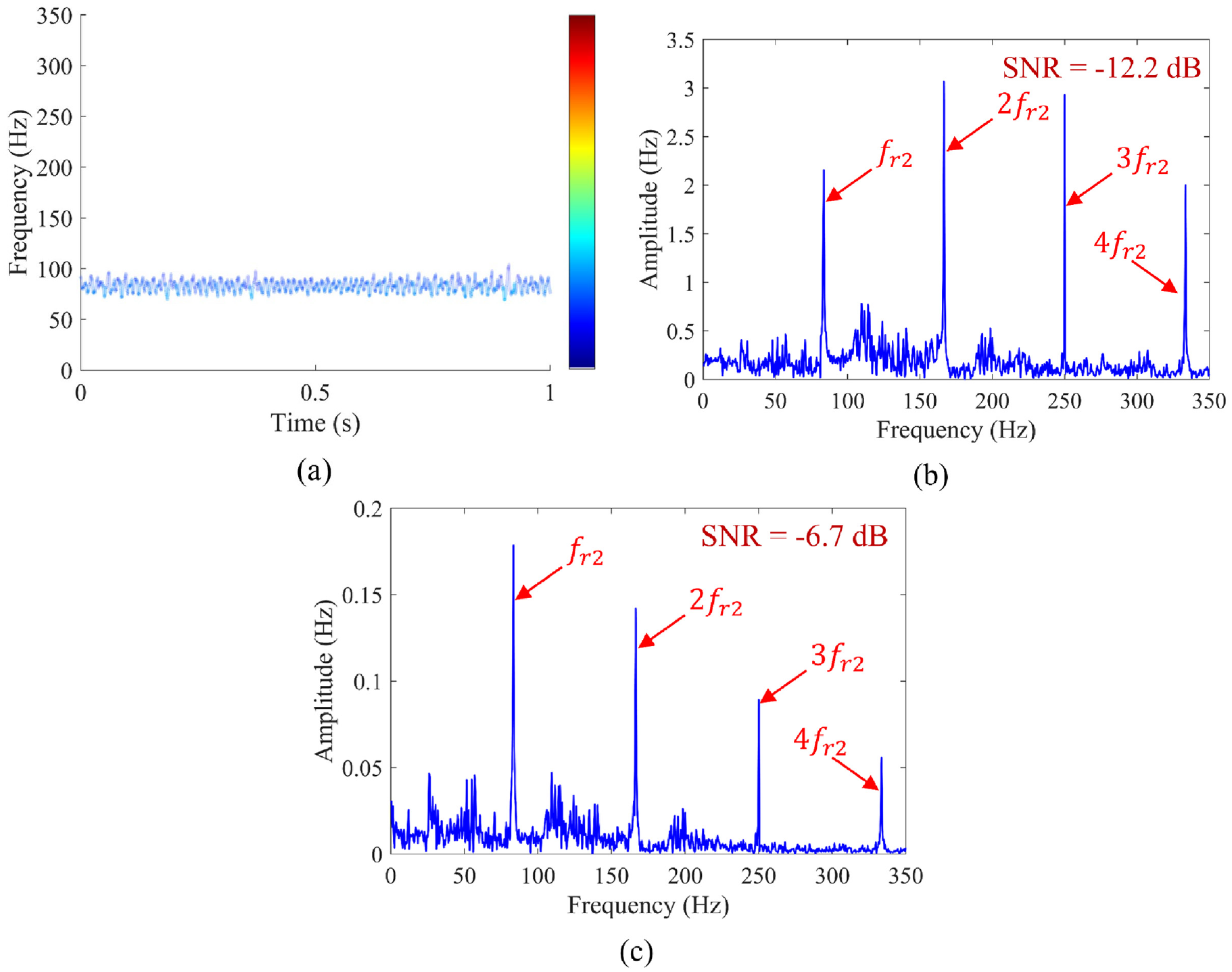
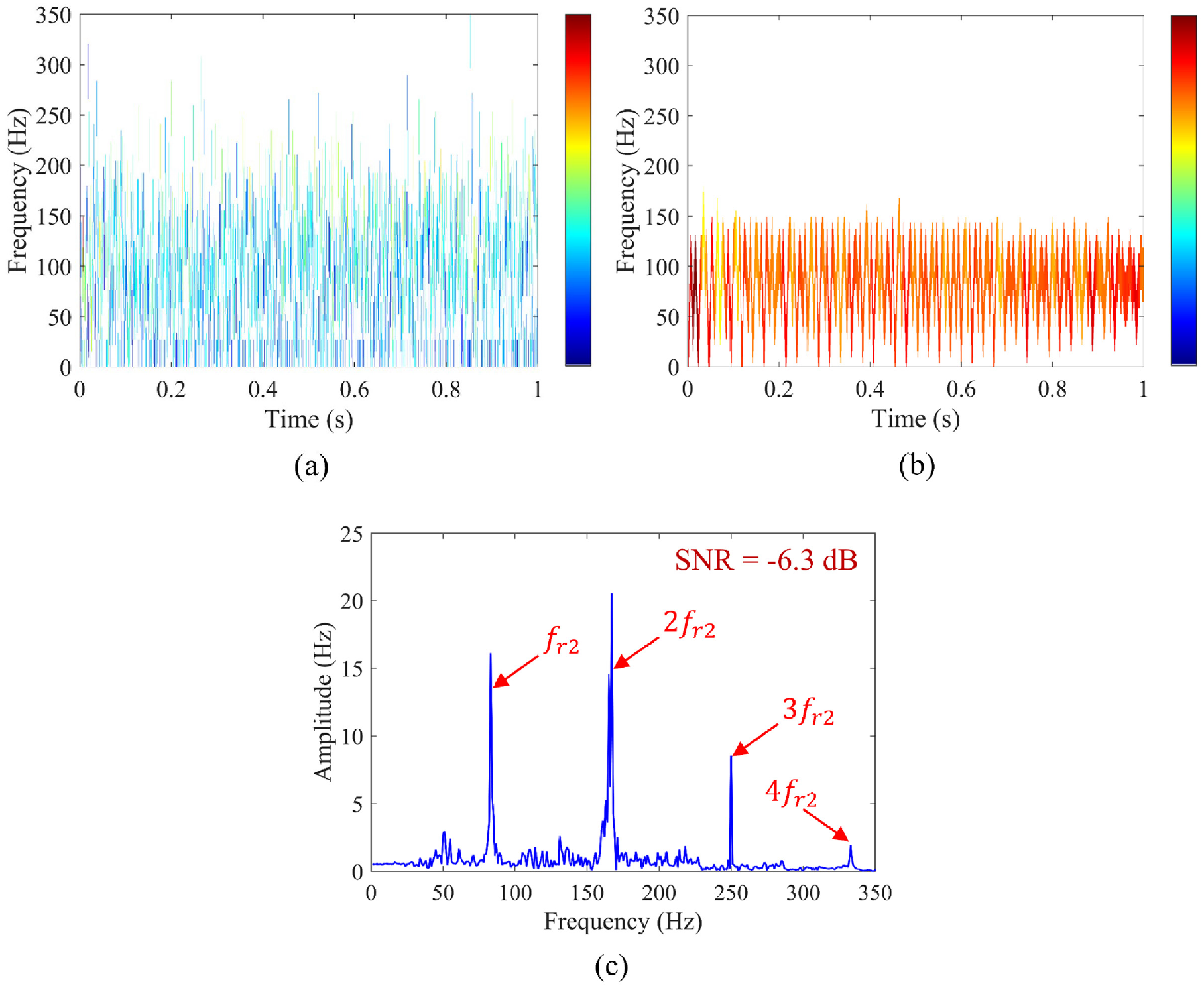
Next, by manually fine-tuning the relative position of the impeller and the pump housing, the rubbing failure of the rotor system of the tested centrifugal pump can be simulated. The rubbing area on the impeller is displayed in Figure 30(b), where the water-insoluble black coating layer is damaged due to the rub-impact. Then, the acceleration signal collected under rubbing condition of the centrifugal pump is analyzed, as depicted in Figure 33(a). Figure 33(b) presents the converted displacement signal after integration, and it can be found that the amplitude is increased due to the rubbing of the rotor system compared with Figure 31(b). Also, in the Fourier spectrum of the displacement signal displayed in Figure 33(c), the amplitude of the rotation frequency component is almost two to three times larger compared to Figure 31 (c), and the blade passing frequency can hardly be seen from the spectrum this time. The proposed approach is applied to analyze the signal, and the signal processing results are illustrated in Figure 34. One can see that the fast fluctuating IF recovered on the TFR depicted in Figure 34(a) clearly manifests the intrawave FM pattern of the target frequency. The Fourier spectrum of the IF estimated by the QDBNHT is presented in Figure 34(b), where the target frequency and its harmonic components can be observed and the SNR is −28.5 dB. Notwithstanding, as described above, this kind of spectrum does not support the robust diagnostics of rotor rub-impact. Therefore, the PSO-optimized SR is utilized to highlight the intrawave FM and further suppress the noise, and the result is illustrated in Figure 34(c), where the target frequency
Vibratory signal acquired under the rubbing condition: (a) time-domain waveform of the acceleration signal, (b) time-domain waveform of the converted displacement signal, and (c) Fourier spectrum of the displacement signal.
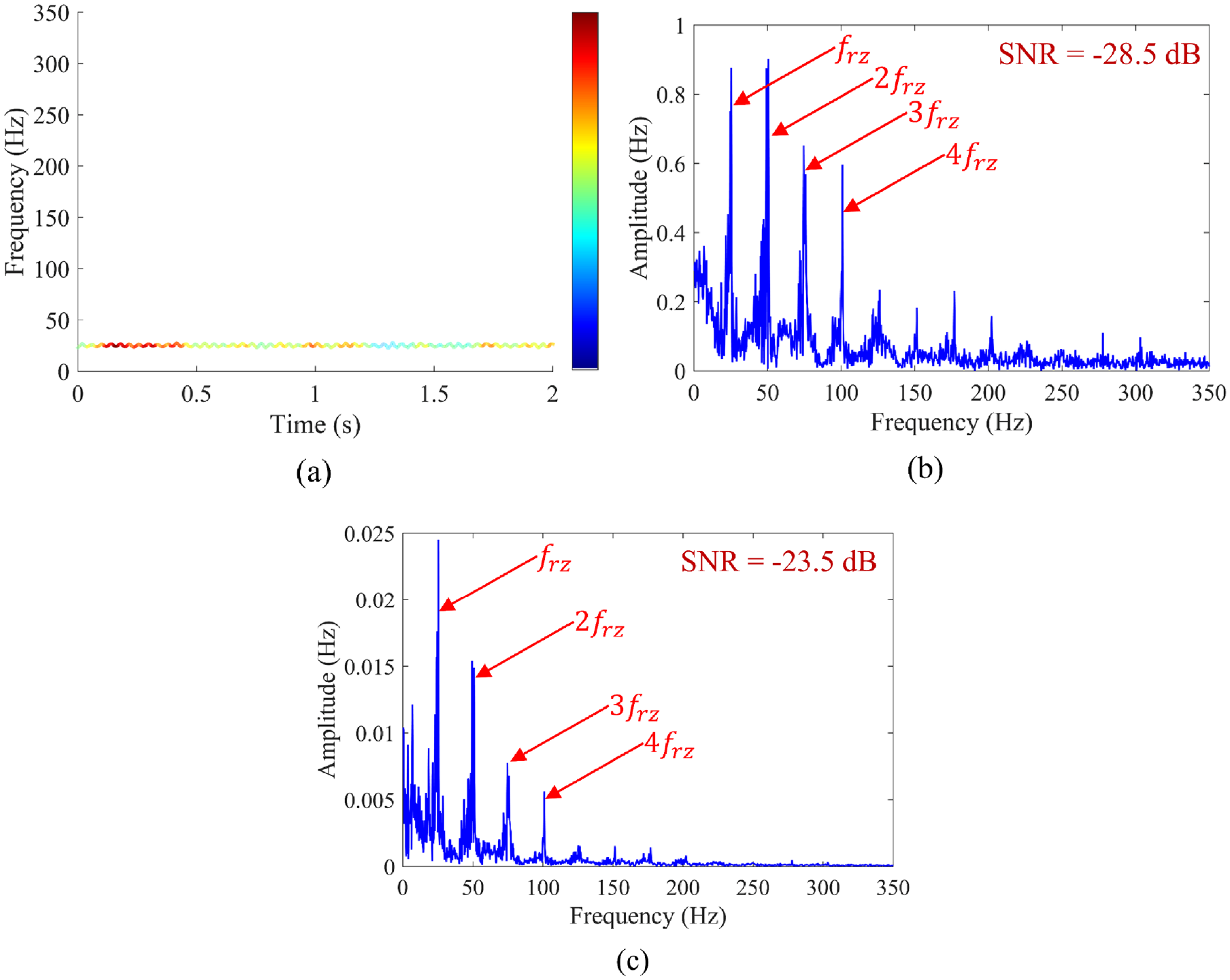
The signal processing results of the proposed approach: (a) TFR of the obtained component via IVMD, (b) Fourier spectrum of the estimated IF, and (c) Fourier spectrum of the estimated IF after enhancement by OSR. IVMD: improved variational mode decomposition; TFR: time-frequency representation; IF: instantaneous frequency; OSR: optimum stochastic resonance.
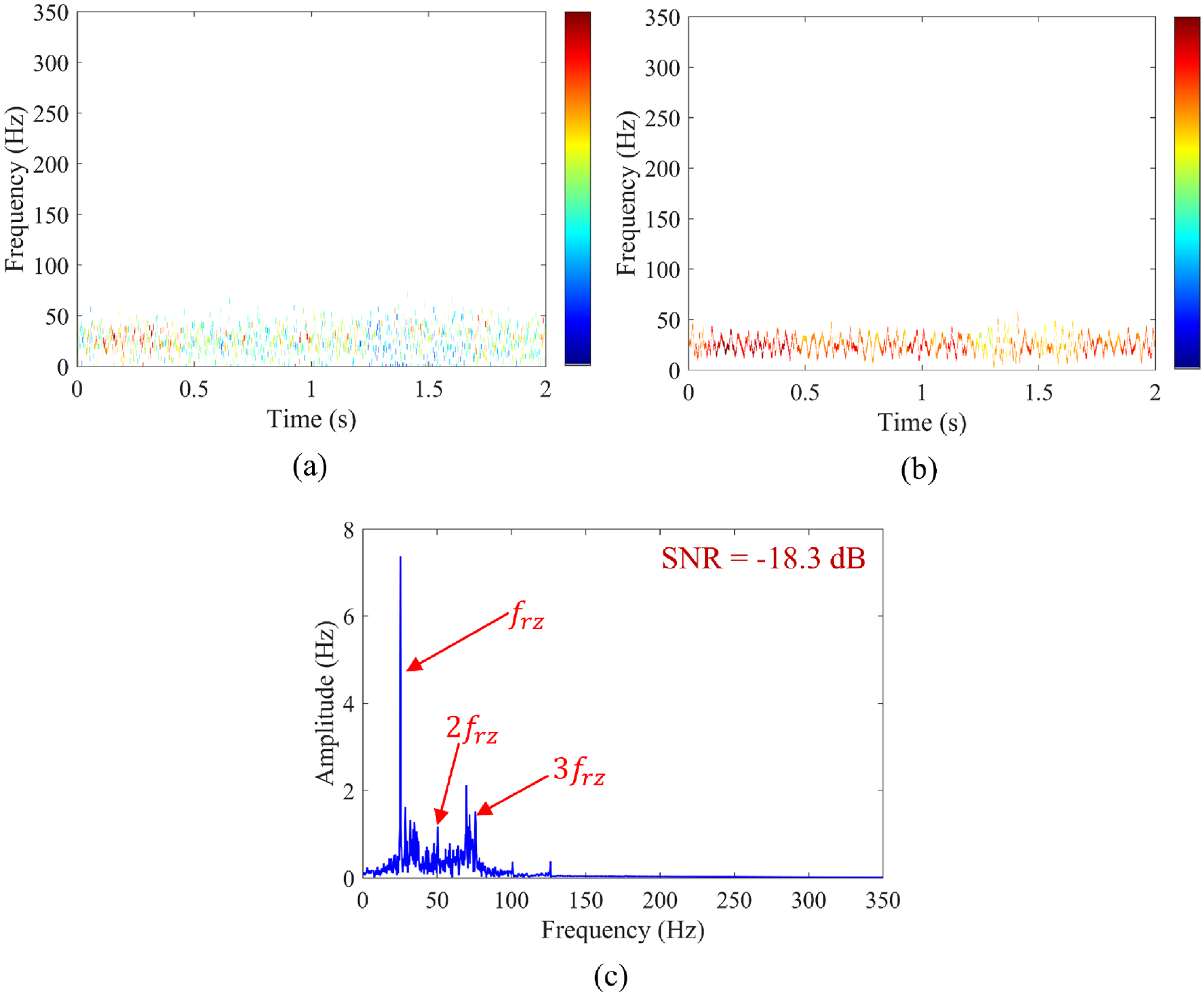
The results of HHT and ACMD: (a) TFR of HHT, (b) TFR of ACMD, and (c) Fourier spectrum of the IF extracted by ACMD.
Conclusion
Aiming at developing a practical and effective approach for robust diagnosis of structural rotor rub-impact under intricate noise interferences, a novel intrawave FM characteristic detection method based upon targeted component extraction via IVMD and OSR-based IF fluctuation enhancement is presented in this work, which can be directly applied to more commonly used vibration acceleration signals through the two-stage integration strategy and the advanced signal processing procedure. In the mainstay of the proposed approach, the IVMD method based on the indicator of MTFI, combined with the QDBNHT method, can effectively capture the rapid fluctuating IF representation of the rotor rub-induced vibration response from the noisy multicomponent signal. Then, the intrawave FM structure of the objective IF is enhanced, and the interference noise is further inhibited by the PSO-optimized SR method, and finally, the reliable and refined identification of rotor rub-impact can be achieved. The effectiveness and superiority of the proposed approach have been validated by using both simulation and experimental data, indicating its merits over existing state-of-the-art TFA methods are that: (1) compared to the HHT, the proposed approach possesses ascendant capability of complex multicomponent signal processing, while the HHT suffers from the deficiencies originated from EMD; (2) compared with ACMD, the proposed approach has few parameters that need to be adjusted to obtain a satisfactory result, which makes it more effortless to be implemented in practice; and (3) in general, compared to both the HHT and ACMD methods, the proposed approach showcases a better performance of TFA, with higher noise resistance and more advanced ability of targeted component extraction, which can efficiently reveal the potential characteristics of rotor rubbing failure. All the results sufficiently confirm that the proposed approach is a promising tool for rotor rub-impact diagnosis under intricate operating conditions in practical applications. Furthermore, the technical methods utilized in the proposed approach are inseparably interconnected to form the novel efficient sequential procedure of signal converting, targeted component extraction, feature enhancement, and fault diagnosis for reliable and robust structural rotor rub-impact diagnostics through vibration acceleration signals under intricate noise interferences, and it can be programmed into an end-to-end formality and implemented with only the measured acceleration signal, sampling frequency, and target rotating frequency as the input, with the output TFR and spectrum of IF as support for the diagnostic decision, where the dependency of expert knowledge for maintenance personnel is substantially lessened.
In the future, research about diagnostic approaches for rotor cracking, mechanical looseness, rotor cocked, and coupled mechanical faults should be conducted based upon a promoted scheme.
Footnotes
CRediT authorship contribution statement
Yaochun Hou was involved in conceptualization, methodology, software, investigation, validation, writing—original draft, writing—review and editing. Huan Wang was involved in conceptualization, methodology, writing—review and editing. Yuxuan Wang was involved in formal analysis, investigation, writing—review and editing. Peng Wu was involved supervision, writing—review and editing. Wenjun Huang was involved in resources, supervision, funding acquisition, writing—review. Dazhuan Wu was involved in resources, supervision, funding acquisition, writing—review.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study was financially supported by Key Research and Development Program of Zhejiang Province (No. 2022C01047) and Eyas Program Incubation Project of Zhejiang Provincial Administration for Market Regulation (No. CY2022226).