
Abstract
Rolling element bearings (REBs) constitute a crucial element in rotating machinery, and their malfunction is one of the most common reasons for unplanned outages and shutdowns. As a result, monitoring the health of REBs, detecting and diagnosing the size and location of faults, and assessing their degradation have been the subject of extensive research. In the last few decades, several signal processing techniques such as Fast Fourier transform, Wavelet transform, Hilbert transform, artificial neural network, and recurrence plot (RP), among others, have been proposed for the diagnosis and prognosis of REBs. However, most of these techniques provide only a qualitative diagnosis while ignoring the quantitative aspect of the faults. The current work proposes a novel entropy-based fault detection approach and grading the condition of bearings from noisy time history measurements. Entropy-based measures based on Kullback–Leibler and Shannon entropy from vibration signals have been used for grading the condition of bearings. Subsequently, these entropy basis measures have been successfully tested on vibration signatures from various bearing fault types occurring at different locations. The results indicate a one-to-one relation between fault severity and its entropy measure. Moreover, each type of bearing fault has been shown to have a well-defined entropy measure, for different faults lie on a nearly linear locus. In addition to the field and experimental data obtained in the workshop, a nonlinear vibration model under the combined effect of the unbalanced and non-Gaussian Poisson loading has been developed to obtain the acceleration time waveform for the fault severity assessment. The noisy nonlinear model takes into account the Hertizian contact force between the ball and races, internal clearance, race waviness, varying compliances, and localized defects. The adaptive time stepping (ATSP) numerical integration combined with the Brownian tree is used to obtain the nonlinear vibration response. The results show the effectiveness of the proposed algorithm in the diagnosis and prognosis of various types of REB faults.
Keywords
Introduction
Rolling element bearings (REBs) are essential components in rotating machinery associated with automobile, aerospace, agriculture, and other industrial applications. REBs endure heavy dynamical loads during harsh operating conditions and the ease of maneuverability of the machines depends on the form and finish of the rolling contact surface. REBs usually undergo progressive degradation with time, leading to structural faults such as pitting, wear, fatigue cracking, galling, and spalling. Moreover, even after using high-precision machining techniques and strict quality inspection procedures during manufacturing, defects in REBs may still arise during the manufacturing process. Any such micro scratch or defect on mating surfaces in the bearing, if it remains undetected, may cause malfunctions and even lead to catastrophic failure of the machinery. Such faults, therefore, not only reduce the reliability and availability of the plant, affecting its financial health but also can prove to be a safety hazard to the operators. Another difficulty associated with fault detection in REBs is examining whether a localized surface defect is associated with bearing components or other faults related to rotor dynamics. Therefore, advanced and unambiguous detection of the severity and position of the localized defects through analysis of the vibration time waveform is essential for system maintenance, process automation, reliability, and quality inspection during manufacturing.1–4
With the advancement in the field of digital networks, microprocessors, and sensors, various condition monitoring techniques based on vibration signals, acoustic emission, ultrasound, wear debris analysis, bearing temperature measurement, sound pressure, and motor current signature analysis have been developed and widely used for the health inference of REBs.2–4 These techniques provide an enormous amount of failure data in raw form, which brings significant challenges in extracting fault features effectively. For instance, vibration condition monitoring using accelerometers mounted on the bearing housing and tracking the spectral characteristics of the vibration signals is a well-established method for fault assessment of REBs. However, it is difficult to precisely identify the bearing defect frequency as it gets masked by ambient noise and other interferences, such as impact vibration, shaft rotational frequency, misalignment, gear noise, and other related components.3–5 Hence, conventional time and frequency domain analyses of raw vibration signals have limitations in capturing nonstationary and nonlinear behavior from real-world time waveforms and are insufficient for accurately assessing the bearing health; the data have to be further processed using advanced signal processing techniques to execute apposite diagnosis and prognosis of the REBs.1–3
Many studies based on advanced signal processing techniques of the time series data from faulty REBs have been conducted to detect and diagnose the fault.5–11 For several decades, statistical parameters, such as kurtosis, crest factor, skewness, autoregressive modeling, and correlation of the vibration signals, have been widely used for fault detection. 8 Apart from these time domain techniques, a wide range of spectral methods based on Fast Fourier transform (FFT), spectral kurtosis, envelope analysis, and improving the signal-noise ratio (SNR) through adaptive noise cancellation have been attempted to characterize faulty bearing signals.1,9 Envelope analysis is another dominant frequency domain technique for fault diagnosis. 12 However, it does not usually provide temporal localization, and also characteristic defect frequencies are not easily distinguishable, hence not able to make the right diagnostic decision when used alone. To overcome the deficiencies of the aforementioned time and frequency domain analyses, several advanced signal processing techniques such as Wavelet transform (WT),13,14 Hilbert-Huang transform (HHT),15,16 adaptive dynamic mode decomposition, 17 particle swarm optimization-based optimized hierarchical dispersion entropy, 18 empirical Fourier decomposition method, 19 artificial neural network (ANN),20,21 cyclostationary analysis,22–25 support vector machine, 20 and recurrence plot (RP) 26 methods have been implemented.
WT 12 is a powerful tool for analyzing nonstationary signals, which decomposes the original time waveform into various frequency bands and hence effectively separates the transient, intermittent, and steady-state behavior.27,28 WT-based de-noising has been used to enhance weak periodic impulse signatures masked by standard Gaussian white noise (GWN). 11 However, WT as a diagnostic tool has its limitations. The efficiency of signal de-noising is governed by the selection of appropriate wavelet basis functions, 29 which requires careful choice of mother wavelet filters. Wrong choices of mother wavelet filters lead to errors in the diagnosis. Furthermore, due to the limited length of the Wavelet basis functions, leakage of signal energy occurs, which, in turn, affects the accuracy of the diagnosis. Alternative methodologies based on various forms of the Kalman filter have been proposed to estimate the system states. 30 However, for strongly nonlinear systems, Kalman-based filters lead to divergence, thereby significantly reducing the accuracy of the diagnosis. Hilbert transform (HT) 14 has also been applied to obtain the instantaneous energy-frequency distribution of nonstationary and nonlinear vibration signals for feature extraction. However, accuracy depends on selecting the optimal frequency band sensitive to rolling bearing fault. 31 Yang et al. 32 conducted the HT of the intrinsic mode functions obtained via Empirical mode decomposition. 33 Recently, the RP 34 and various recurrence quantification analysis techniques for nonlinear time series have been proposed for evaluating machine defect severity. 26
Most of these signal processing techniques require suitable pre-defined feature vectors as input and focus only on qualitative diagnosis, which concentrates mainly on the type or severity of the fault while ignoring its quantitative aspects. Hence, most available signal analysis techniques are suitable for identifying single-point defects. The present study focuses on the detection of multiple faults. To extract the features of faults in REBs from time histories of signals that are most often noisy, the current work proposes a novel entropy-based approach for assessing the degradation in REBs. First, the characteristics of Shannon entropy and Kullback–Leibler entropy measures are investigated. Next, a classification akin to a learning algorithm is developed from field vibration data, where faults are artificially introduced on the outer race, inner race, and rolling elements. The defects in the REBs are considered to be of different types and severity levels. Finally, the status of the health of REBs is extracted from bearing vibration (acceleration) time histories. Experimental and field vibration data are used to determine the effectiveness and robustness of the proposed measures.
In addition to field and workshop vibration data, a nonlinear noisy model is also used to simulate the vibration time waveform in the presence of localized and distributed bearing defects. The two degrees of freedom nonlinear stochastic model of rotor bearing system considers various sources of nonlinearity such as Hertizian contact force 35 between ball and races, internal clearance, race waviness, varying compliances, and localized defects.36,37 To make the model more appropriate, the nonlinear model is subjected to the simultaneous action of the harmonic force to model the effect of rotor unbalance and a non-Gaussian Poisson force to include the effect of several unmodeled defects such as background noise, bearing looseness, and lubrication system. Due to the presence of discontinuity induced by the Hertzian impact, to capture the finer details at the discontinuity points, the adaptive time stepping (ATSP) numerical integration combined with the Brownian tree continuation is used to obtain the nonlinear vibration response.38–42
The present work is organized as follows: Section “Brief introduction about signal processing techniques for diagnosis of defective REBs” presents a brief review of various signal processing techniques for analyzing vibration waveform for a defective rolling bearing. An entropy-based methodology for vibration diagnostics and performance degradation assessment is proposed in Section “Entropy-based performance degradation measure.” Section “Experimental setup” discusses the experimental setup used in the study. Section “Theoretical model for vibration response to predict the localized and distributed defect of faulty REBs” presents the numerical nonlinear stochastic model for vibration response to predict the localized and distributed defects of faulty REBs. Section “Results and discussion” presents the computational results, and the behavior of the defective REBs is discussed using the Kullback–Leibler and Shannon entropy measures, as obtained from the vibration signatures. The conclusions emerging from the present study are presented in the final section.
Brief introduction about signal processing techniques for diagnosis of defective REBs
Analysis of REB structural signals using statistical parameters in the time domain and characteristic frequency in the frequency domain of either vibration or acoustic emission datasets have been frequently used as features for machine performance degradation assessment. However, it has a limited diagnostic capability (Figure 1 shows the kurtosis trend with bearing degradation).
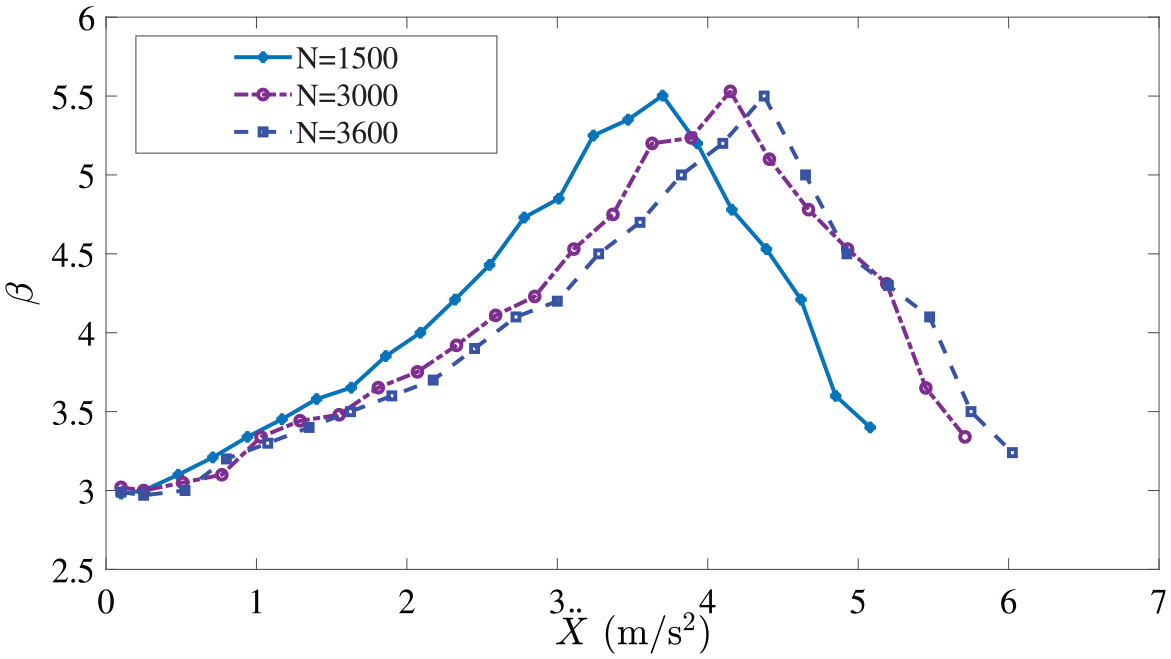
Variation of kurtosis with the severity of bearing damage;
To overcome the deficiencies of the time and frequency domain techniques, various modern signal processing methods, such as WT13,14 and HHT,15,16 have been proposed to process the faulty bearing signals. Essentially, WT is an extended form of FT, which uses a family of adjustable windows functions. The WT for a signal

where
However, the convolution-based WT has limitations in selecting the optimal frequency band corresponding to the defect frequencies, causing errors in amplitude envelope and instantaneous frequency.13,14 To overcome the limitation of WT and conventional envelope analysis in dealing with the noisy signal, the HHT15,16 has been proposed for condition monitoring of REBs. The HHT essentially integrates the HT, which decomposed signals into a finite and small number of components known as intrinsic mode functions (IMFs) using the empirical mode decomposition (EMD).
43
HT is used to extract the instantaneous frequencies of IMFs. The HT for a given signal

Next, the analytical signal is obtained by adding the original signal

where
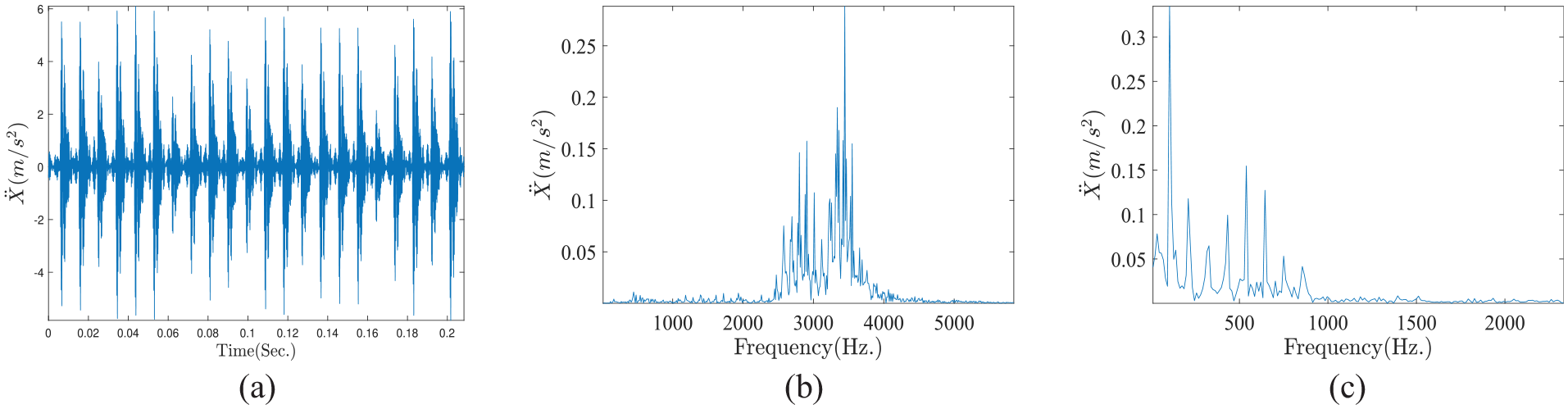
(a) Time series, (b) spectrum, and (c) envelope spectrum (HT) for rolling bearing with outer race fault.
On the assumption that the surface defects in the mating surface of REBs usually generate repetitive transient impulses embedded with second-order cyclostationary, the cyclostationary analysis has recently gained momentum as an alternative to time/frequency analysis for diagnostics of bearing faults.23–25 Cyclic spectral analysis, giving statistical properties such as the spectral correlation (SC) and its normalized version, spectral coherence (SCoh), 45 is an effective tool for bearing second-order cyclostationary fault characterization and extraction. However, in many practical cases, bearing vibration signal exhibits mixed cyclostationarity, which inevitably complicates the analysis when the SCoh is used as the analysis tool.
The various classical time (statistical) and spectral analysis techniques are best suited for linear stationary time series having low noise and long data series with high sampling rates. However, due to instantaneous variations in loading pattern, friction between ball bearings, and damping, the actual field time-series waveforms are often inherently a mixture of non-stationarity, nonlinearity, and noise. Recently, various nonlinear time-series analysis techniques, such as RP 34 and related recurrence quantification analysis tools, have emerged as a new research tool for defect severity evaluation in the measured signals for rotating machines with REBs due to their good anti-noise ability and short time waveform requirement.
An RP,
34
based on the Taken embedding theorem,
46
is a graphical method to examine the recurrent behavior, using time correlation information of a single short time series qualitatively. Given a time series data for a dynamical system

where
Entropy-based performance degradation measure
The present work proposes a novel entropy-based vibration diagnostic tool for REB faults to accurately diagnose different types of faults and their severities from real-time vibration time histories. The time history measurements from the field (or workshop) are often noisy and, hence, most suitable for analysis using entropy-based measures. The concept of entropy has wide application in science and engineering as a tool for statistical measure and pattern recognition. We describe in the current section the Shannon and Kullback–Leibler entropy measures to extract features of the fault and compare them with existing methods.
Kullback–Leibler entropy
Kullback–Leibler divergence measure, also known as Kullback–Leibler entropy or relative entropy, measures the distinguishability of a particular probability density function (pdf)

It is evident that the relative divergence measure satisfies
Shannon entropy
In statistical mechanics, Shannon entropy

where
Experimental setup
Figure 3 shows the experimental setup designed to simulate various operating conditions. It consists of a variable-speed motor, a rotor supported on two bearings, and a loading unit.
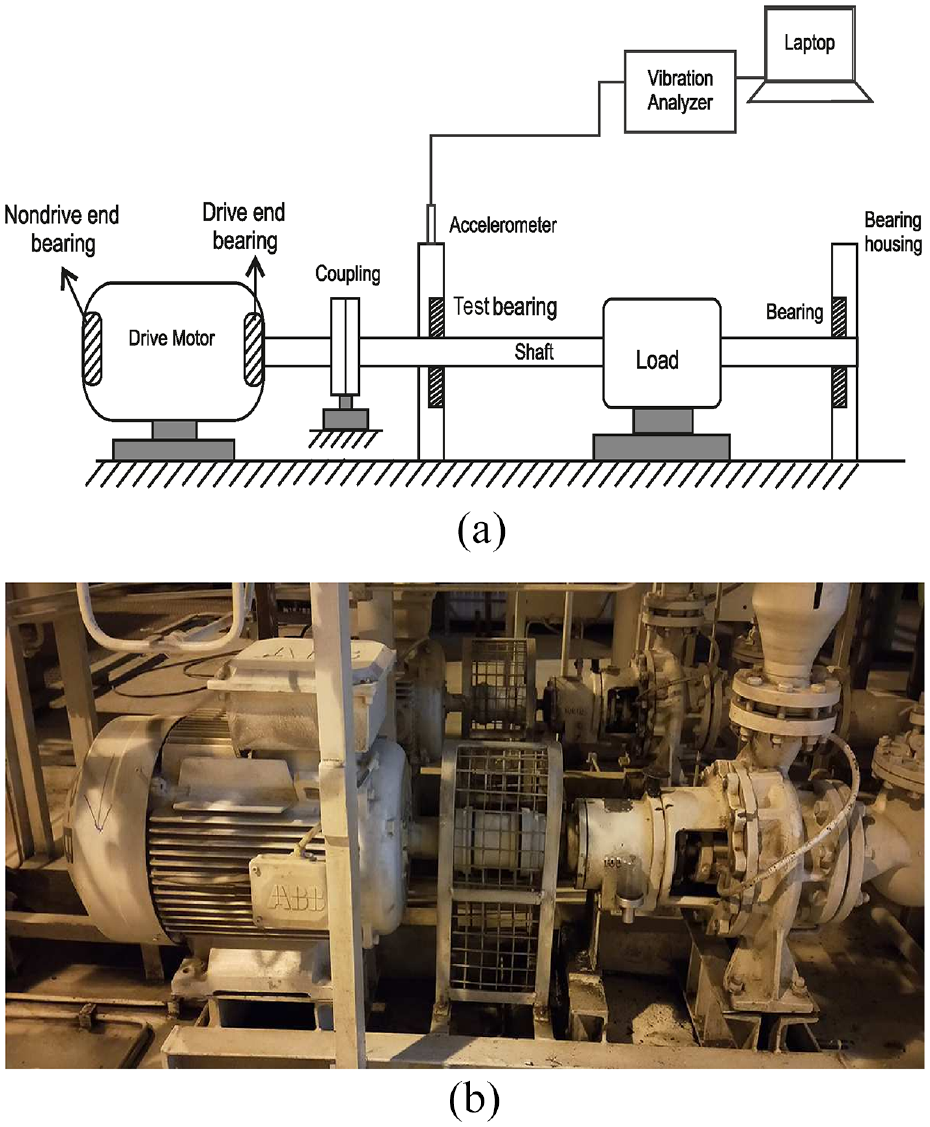
(a) A schematic diagram of the rotor-bearing test rig and (b) a photograph of the motor pump assembly for the field data.
Single point defects of varying degrees of intensity are artificially induced through electric spark erosion (using a wire-cutting machine) on the inner race, outer race, and the rolling elements of bearings. The fault depth and width are taken to be
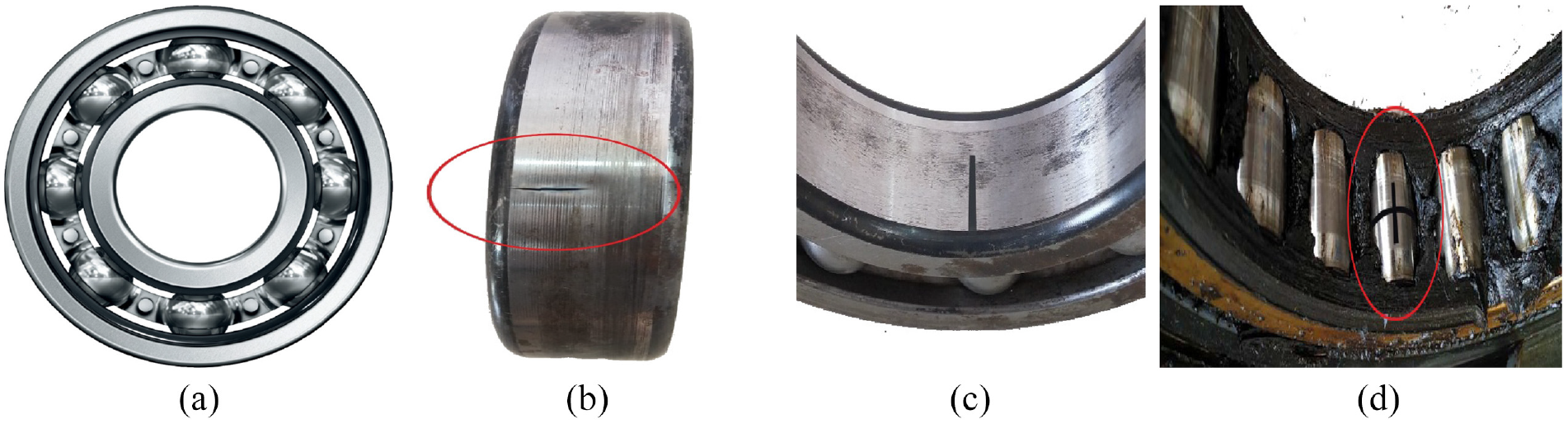
Four different conditions of the rolling bearings: (a) healthy bearing as a reference, (b) with inner race defect, (c) with outer race defect, and (d) with roller defect.
As the mating parts of bearings pass over the defects, a series of pulses of very short duration is generated, and these pulses are picked up by the accelerometers mounted on the bearing casing. The vibration (acceleration) data acquisition system includes an accelerometer, signal conditioner, signal recorder, and laptop. Data acquisition is carried out using ADRE 408 DSPI/Sxp Dynamic Signal Processing Vibration Analyzer. The piezoelectric accelerometer (sensitivity
Theoretical model for vibration response to predict the localized and distributed defect of faulty REBs
To investigate the structural vibration characteristics of the rolling element bearing, a nonlinear dynamic model of the rotor-ball bearing system, as shown in Figure 5, is considered in which the inner race is rigidly fastened on a rotating shaft, and the outer race is rigidly fastened to the bearing housing. In addition to unbalanced force, various nonlinear factors specific to REBs, namely, Hertzian contact force, varying compliance, race waviness, cracks, distributed defects, misaligned races, bearing clearance, and localized defects, complicate the rotor dynamics analysis of rotor supported on ball bearings.
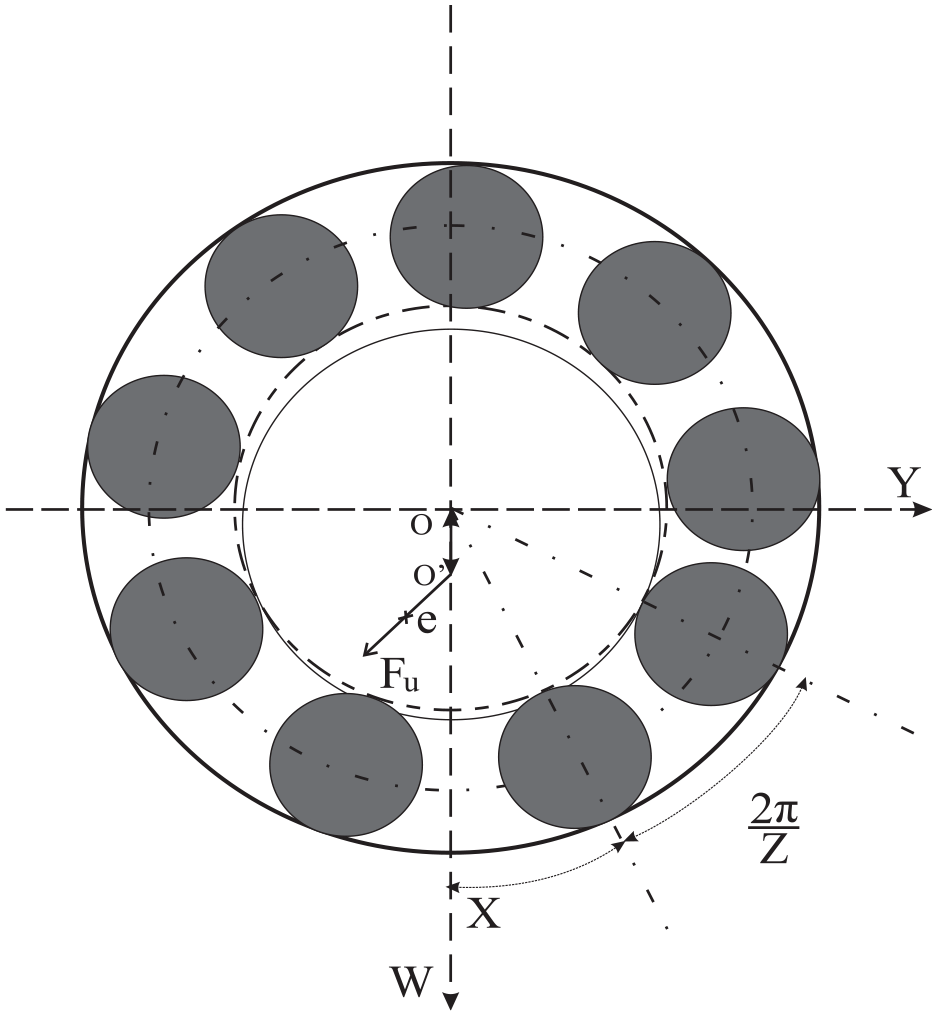
Schematic diagram of rolling element bearings.
The interaction between the outer and inner race through the rolling balls generates a nonlinear restoring force, which can be obtained using Hertz contact deformation theory.
35
The total nonlinear restoring force acting on the bearing in the

where

Considering internal radial clearance and race waviness, the normal contact deformation at the jth ball at angle

where

where

where
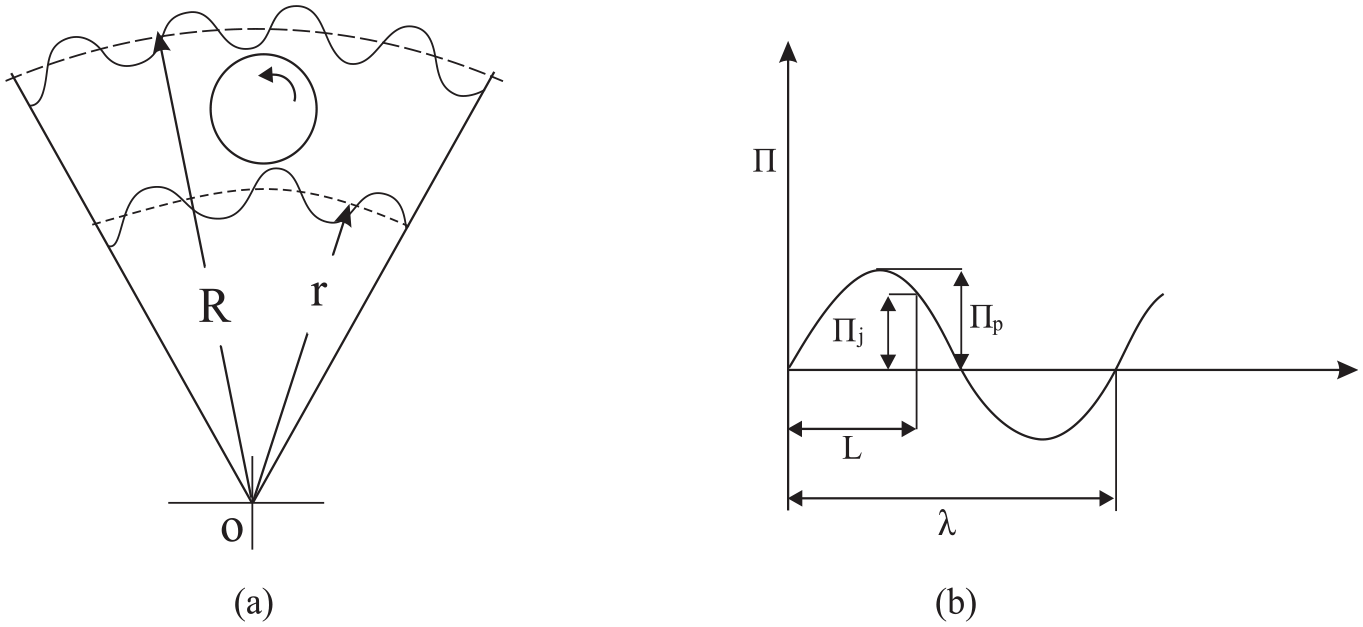
(a) Waviness at the outer and inner races of rolling element bearings and (b) amplitude of wave.
Moreover, when the ball passes over the site of localized defect on the bearing surface having an angular position of

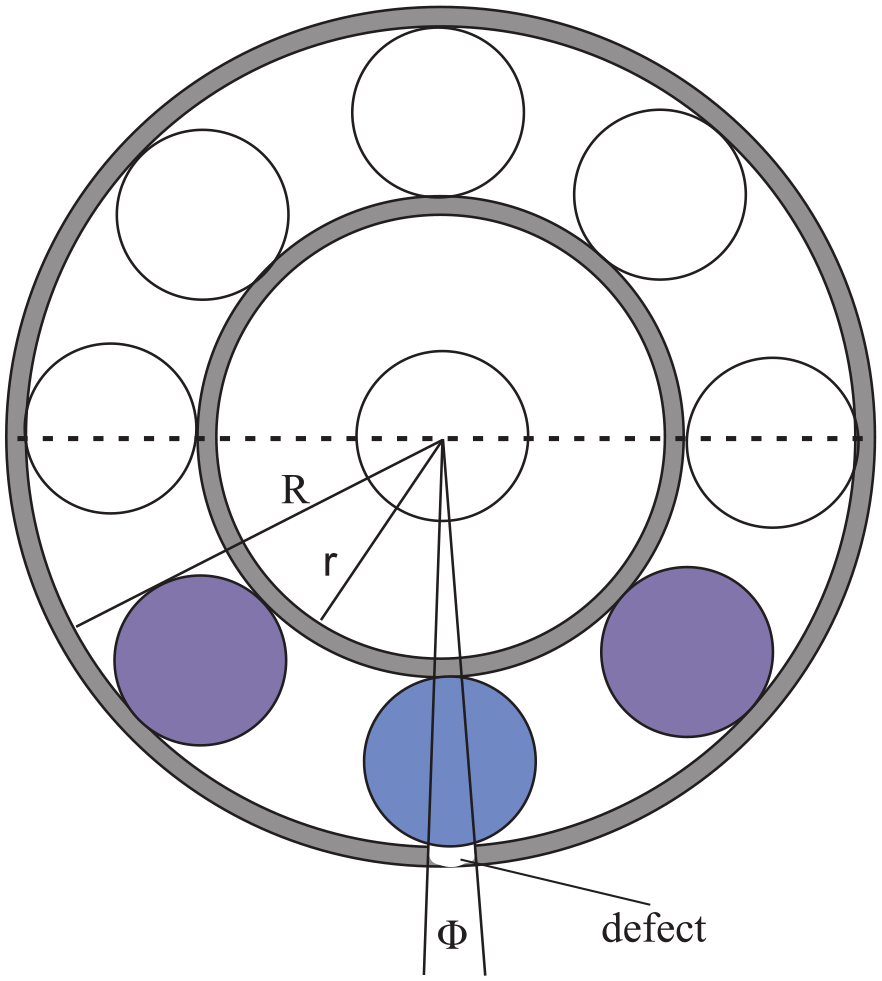
Defect on outer race of rolling element bearings.
where

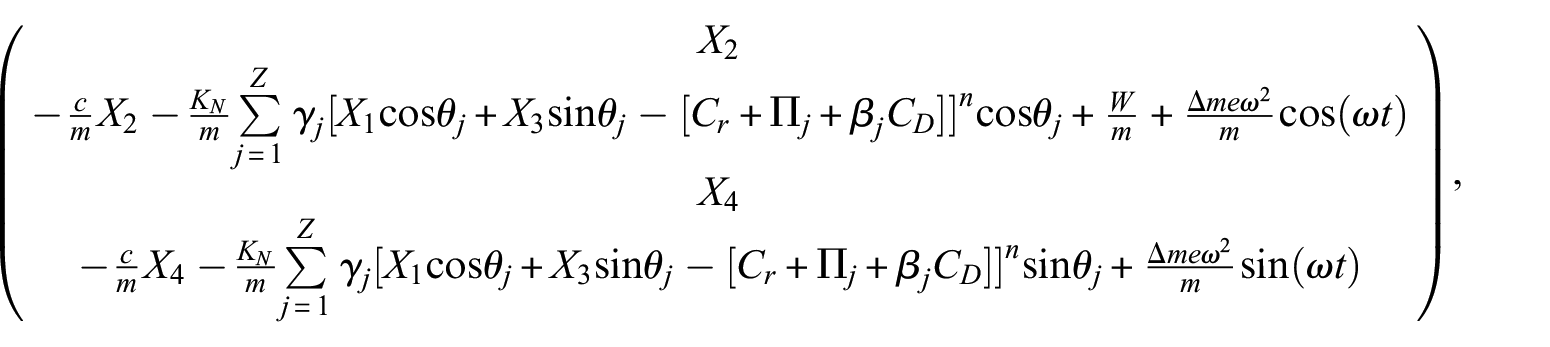
Considering all the different components as discussed above, the equation of motion for two degrees of freedom REBs subjected to the simultaneous action of rotor unbalance force and Poisson white noise (PWN) can be expressed as:

where
The forcing function acting on a defective REB system has two components: deterministic parts, such as unbalanced forces and excitation generated due to the interaction of rolling elements with a defect for which a mathematical model exists, and stochastic parts generated due to numerous unmodeled factors, such as form error, out of roundness, off-sized rolling elements, and lubricant film. Traditionally, stochastic excitation in mechanical systems is hypothesized as GWN excitation. However, GWN having uniformly distributed power spectral density is not precise in simulating interference noise caused by random impact caused by the impact of rolling elements over defective surfaces. Random time waveforms, as obtained from defective REBs in industrial applications, are not always continuous, and hence, in line with practical data, the PWN (a typical non-GWN signal) is used to simulate the discrete disturbance generated by several unmodeled effects. The sample function of randomly acting PWN excitation

where
Introducing the variables

where
and

where
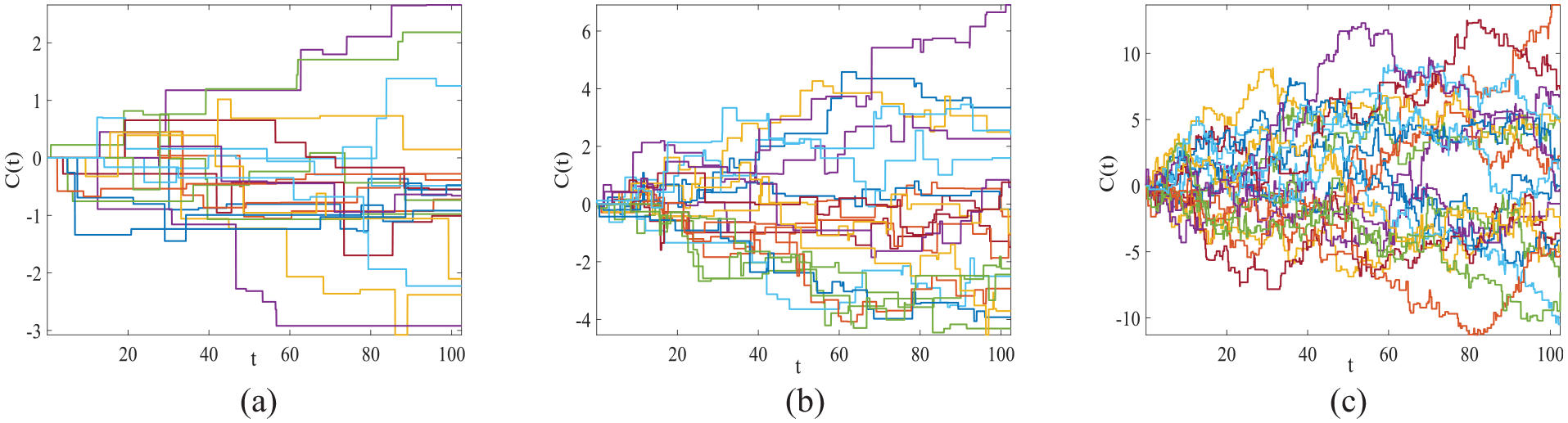
Samples of compound Poisson process
Due to switching functions such as
To obtain the vibration response of faulty bearing, the recently developed adaptive time stepping method (ATSM) approach (Figure 9(a)) is used to integrate Equation (14) to accurately locate the discontinuity point arising due to bearing defects and a Brownian tree continuation approach (Figure 9(b)) is used to direct the integration along the correct Brownian path.38–40 Dynamical behavior and response statistics of the defective bearing are studied through the time series analysis, phase plane plots, Poincaré sections, and marginal pdf with changes in system and excitation parameters. Marginal pdf of the state variables is obtained using MCS for the system of Equation (14). This involves simulation of the increment of the jump component of the compound Poisson process and numerically integrating the SDE Equation (14) using the forward Euler–Maruyama (EM) integration scheme to each individual excitation until the steady state is obtained for the statistical properties.
53
On average,
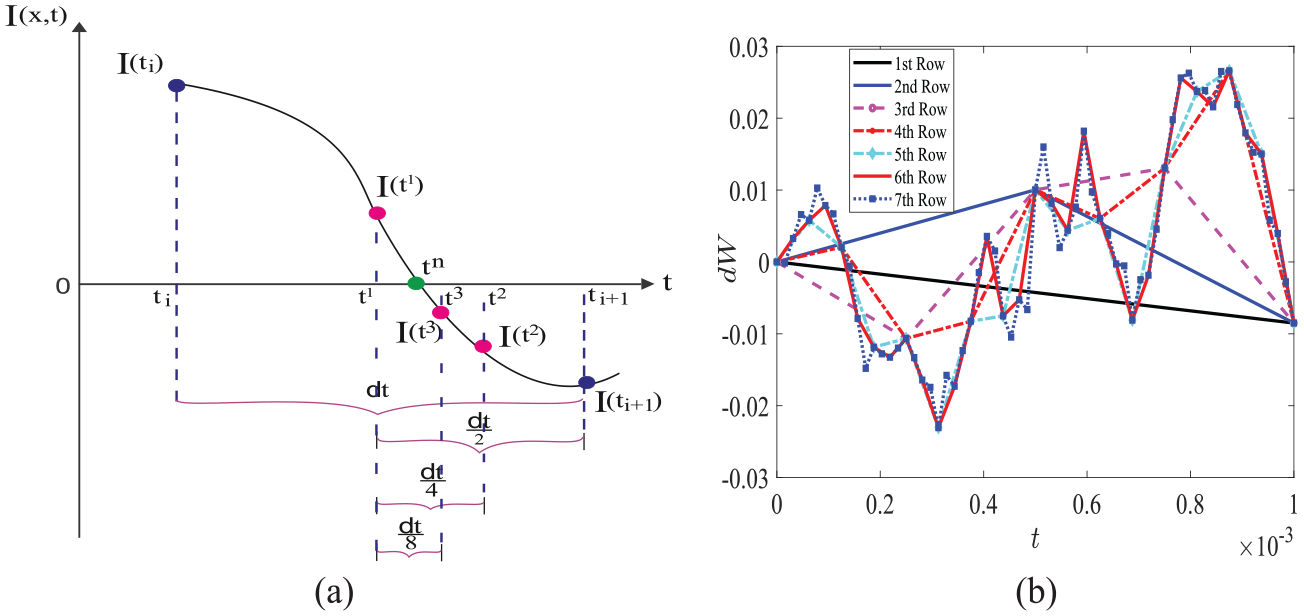
(a) Bisection scheme and (b) sample of a Brownian tree.
Results and discussion
Nonlinear vibration analysis
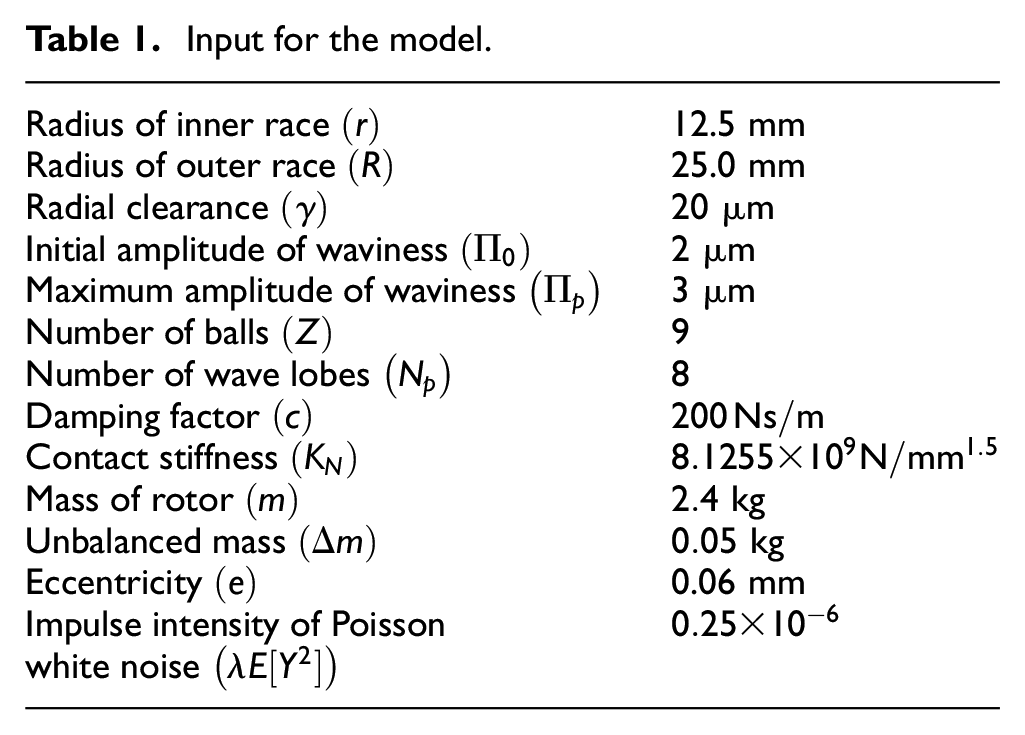
To investigate the effects of the system parameters on the vibration response of defective REBs, the system and excitation parameters are kept fixed, as listed in Table 1, for most of the numerical calculations. The intensity of impulse amplitude
Input for the model.
The marginal pdf of horizontal acceleration for different values of bearing internal clearance
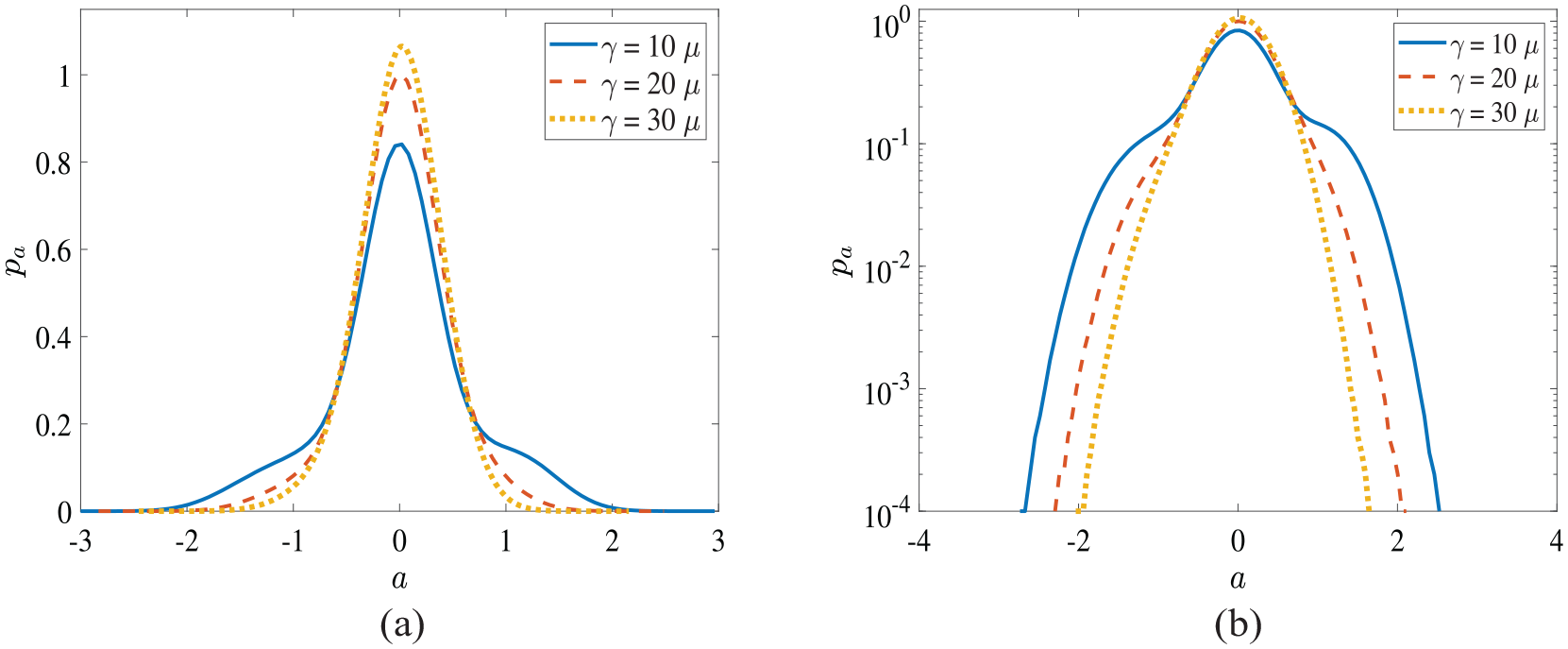
Marginal pdf of horizontal acceleration for different values of bearing internal clearance
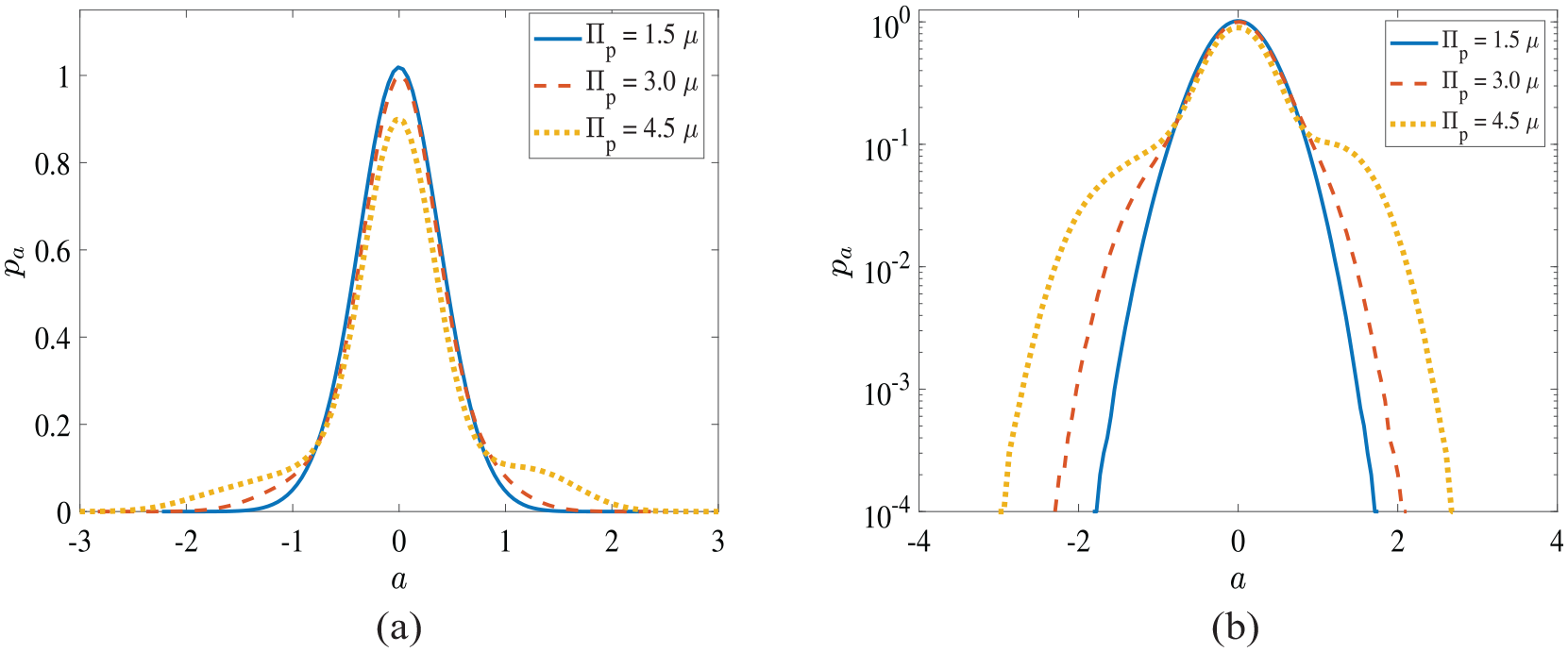
Marginal pdf of horizontal acceleration for different values of amplitude of surface waviness
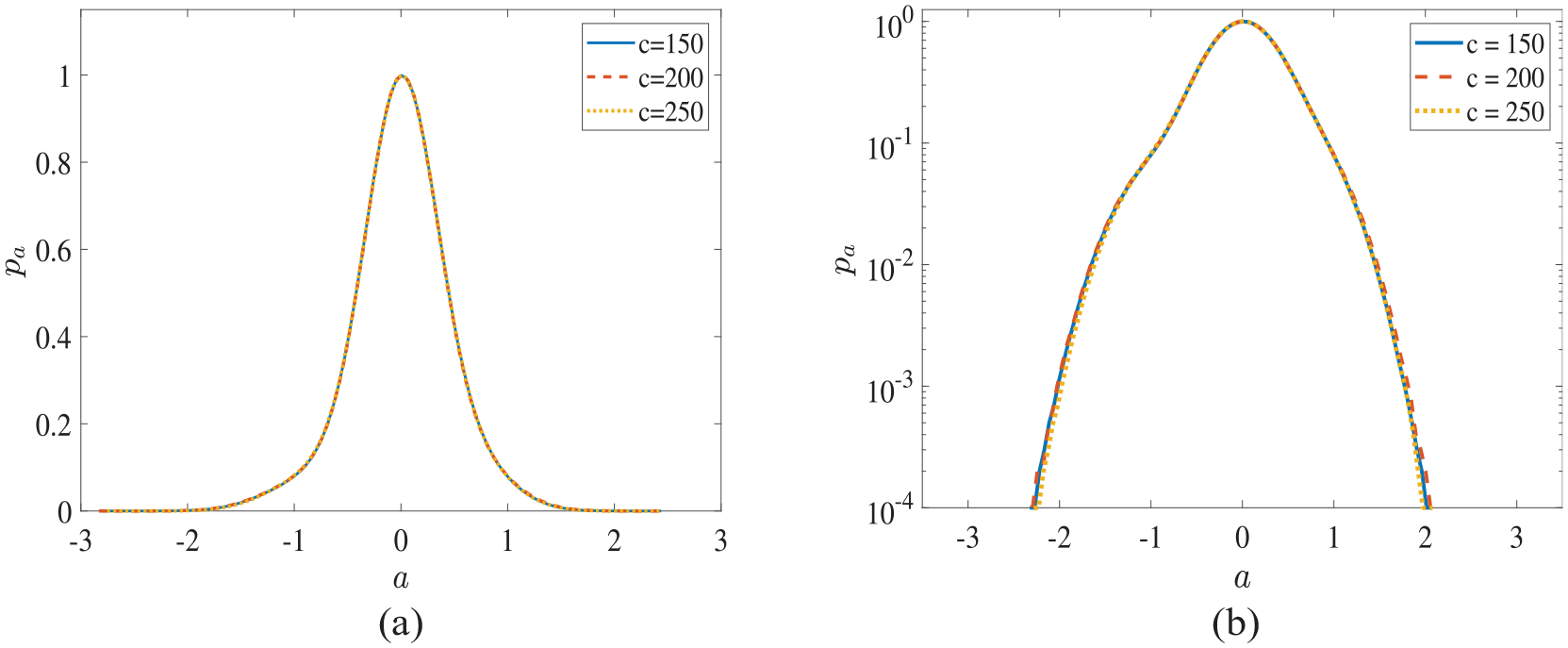
Marginal pdf of horizontal acceleration for different values of viscous damping coefficient
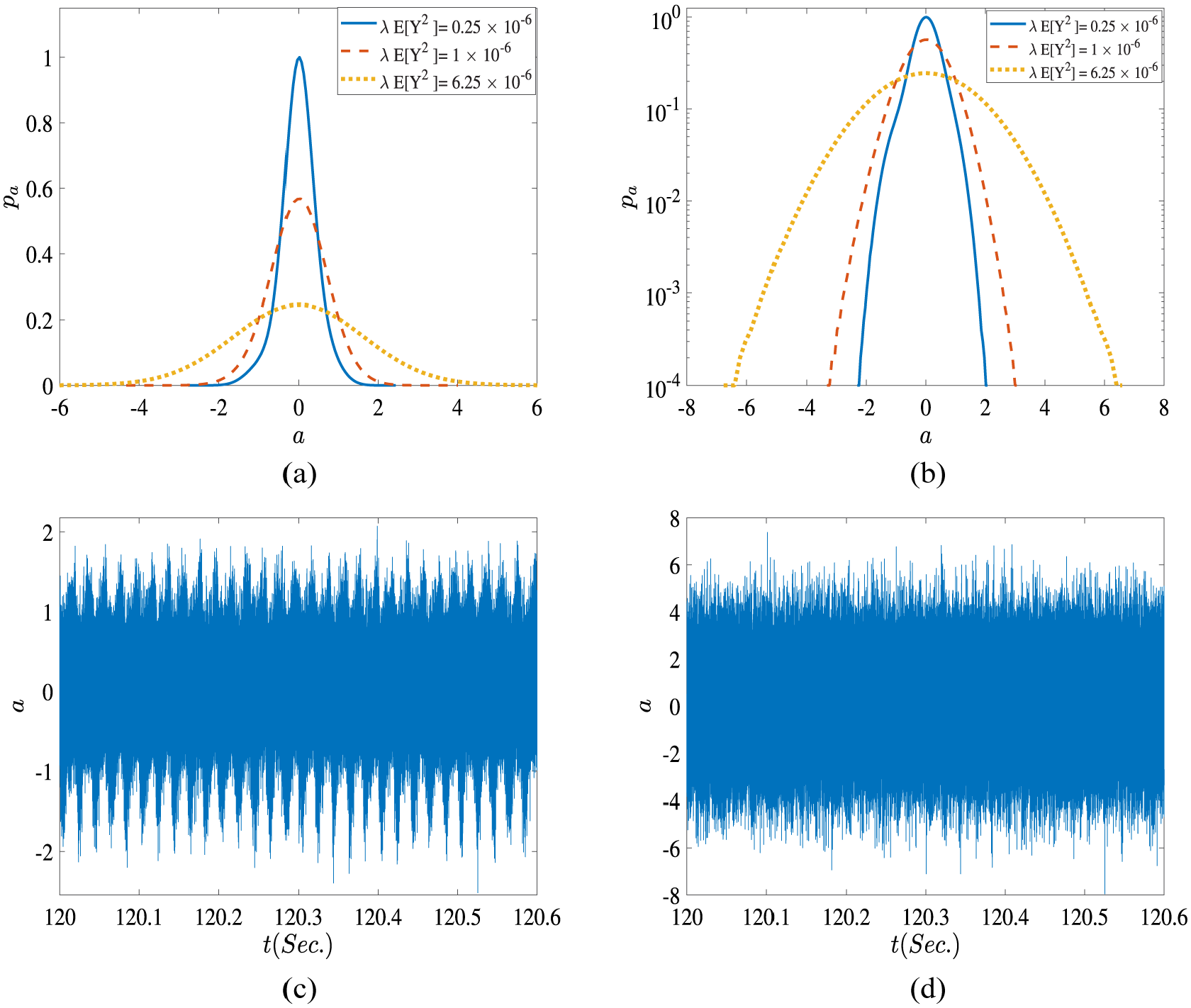
Marginal pdf of acceleration time waveform for different values of
Next, the influence of unbalanced force
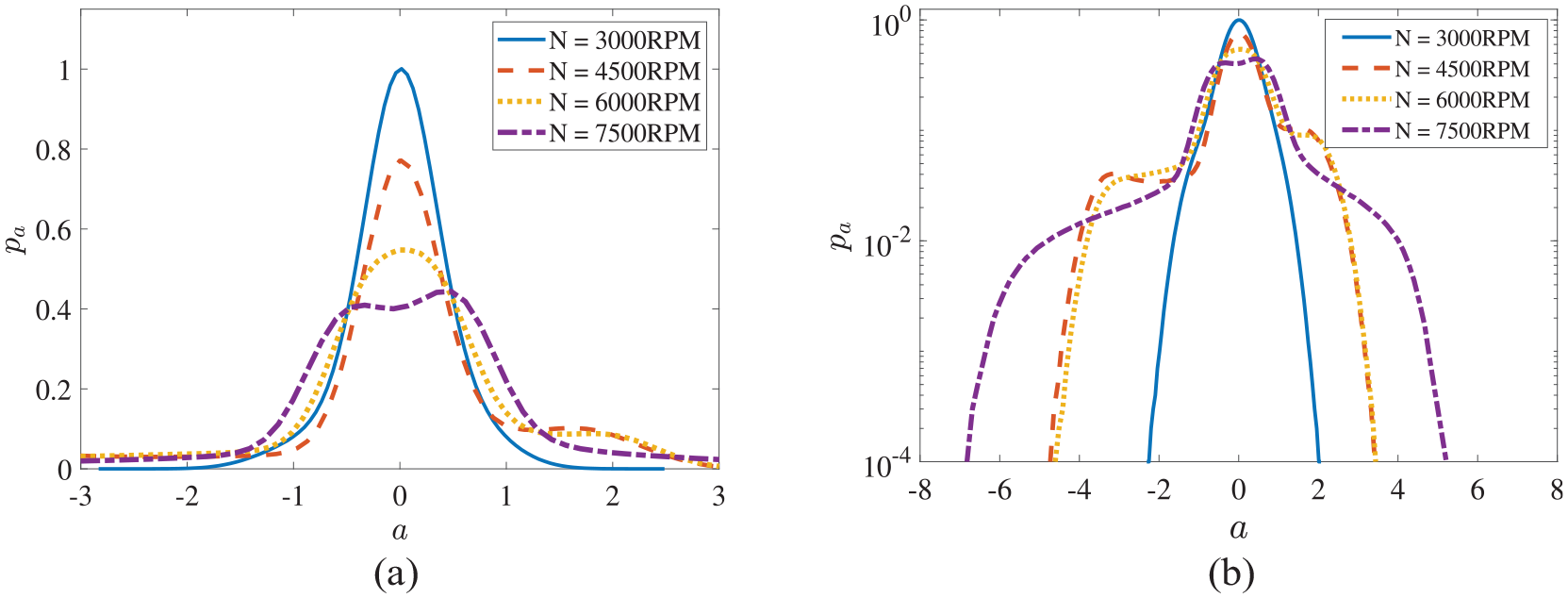
Marginal pdf of horizontal acceleration for different values of rotational speed
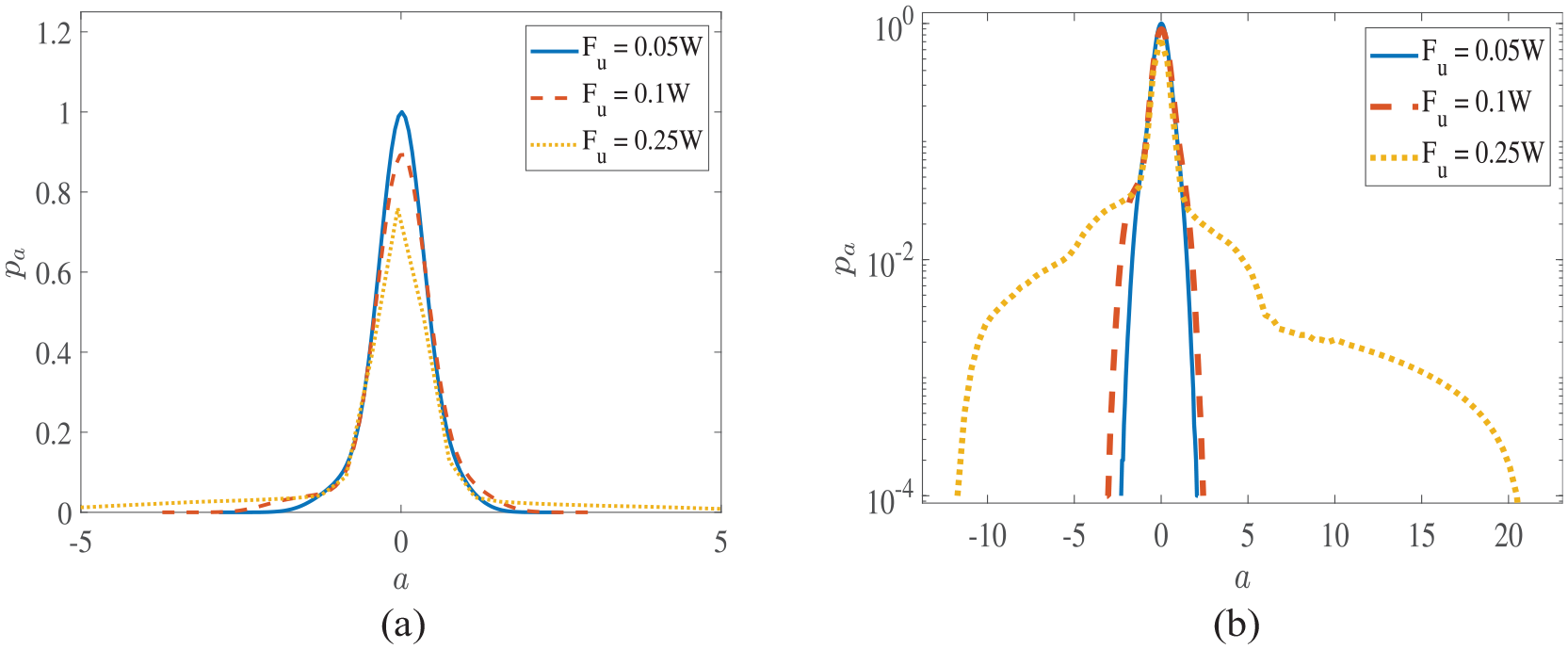
Marginal pdf of horizontal acceleration time waveform: (a) linear plot and (b) logarithmic plot.
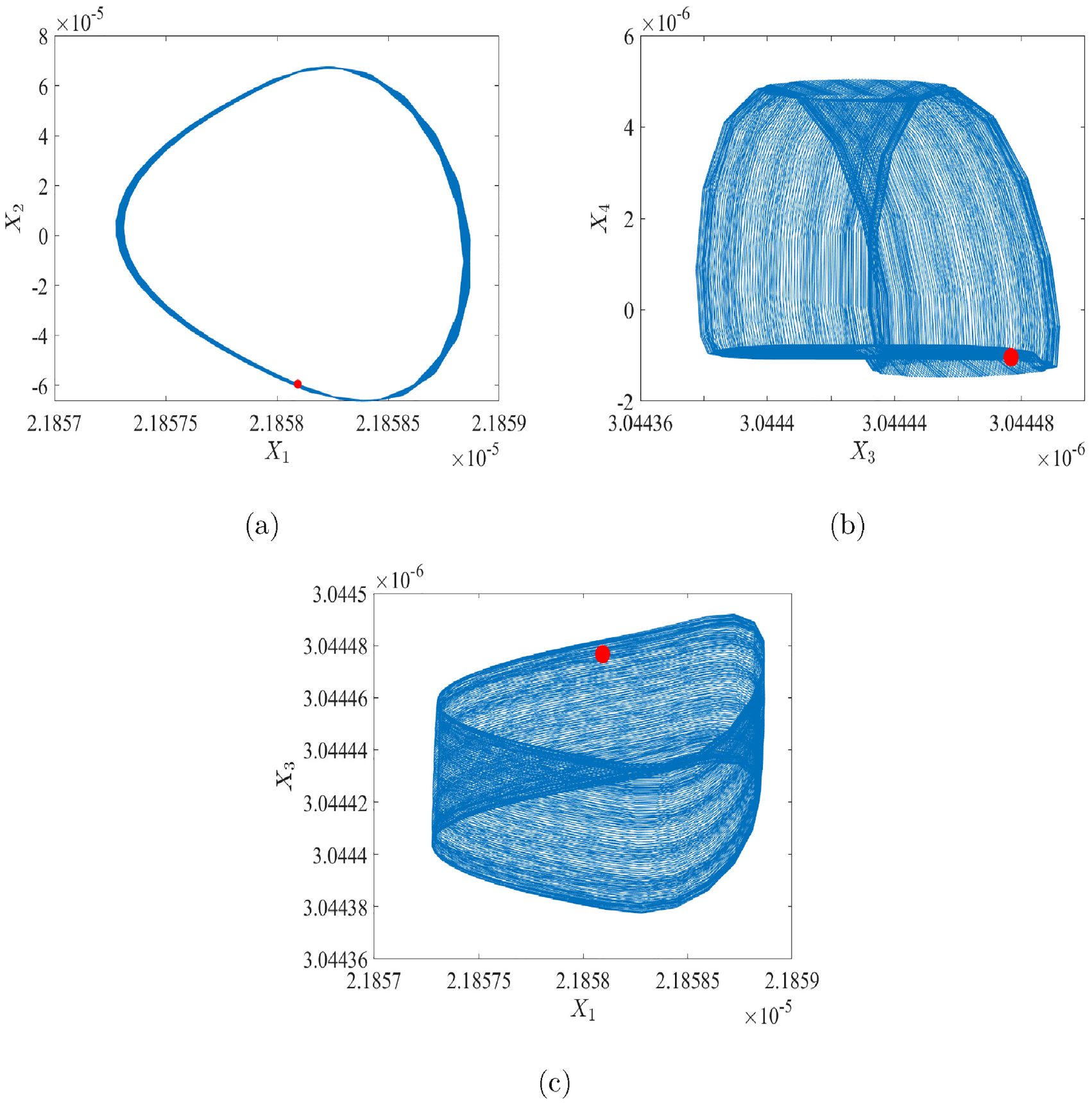
Phase space plot (
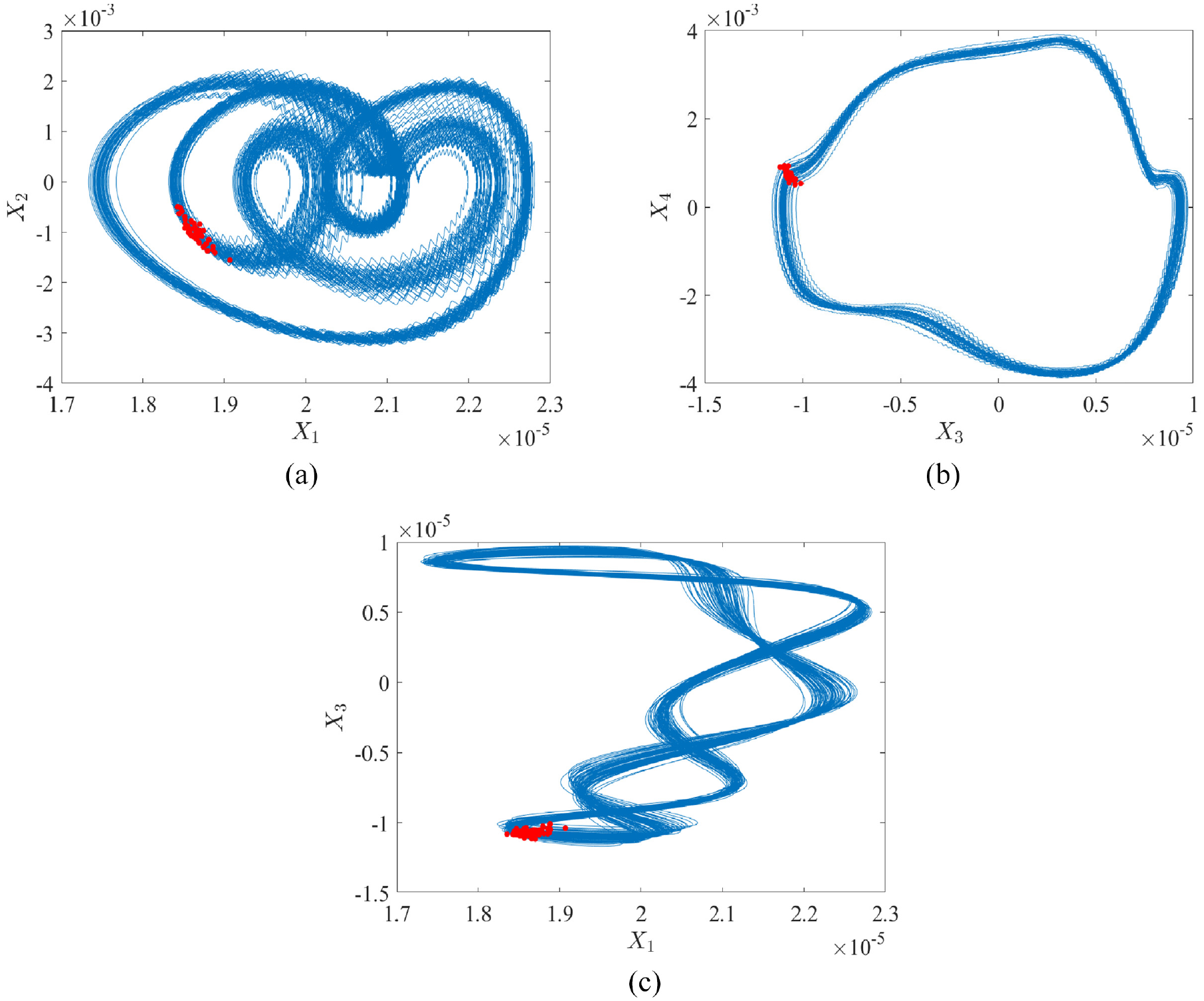
Phase space plot (
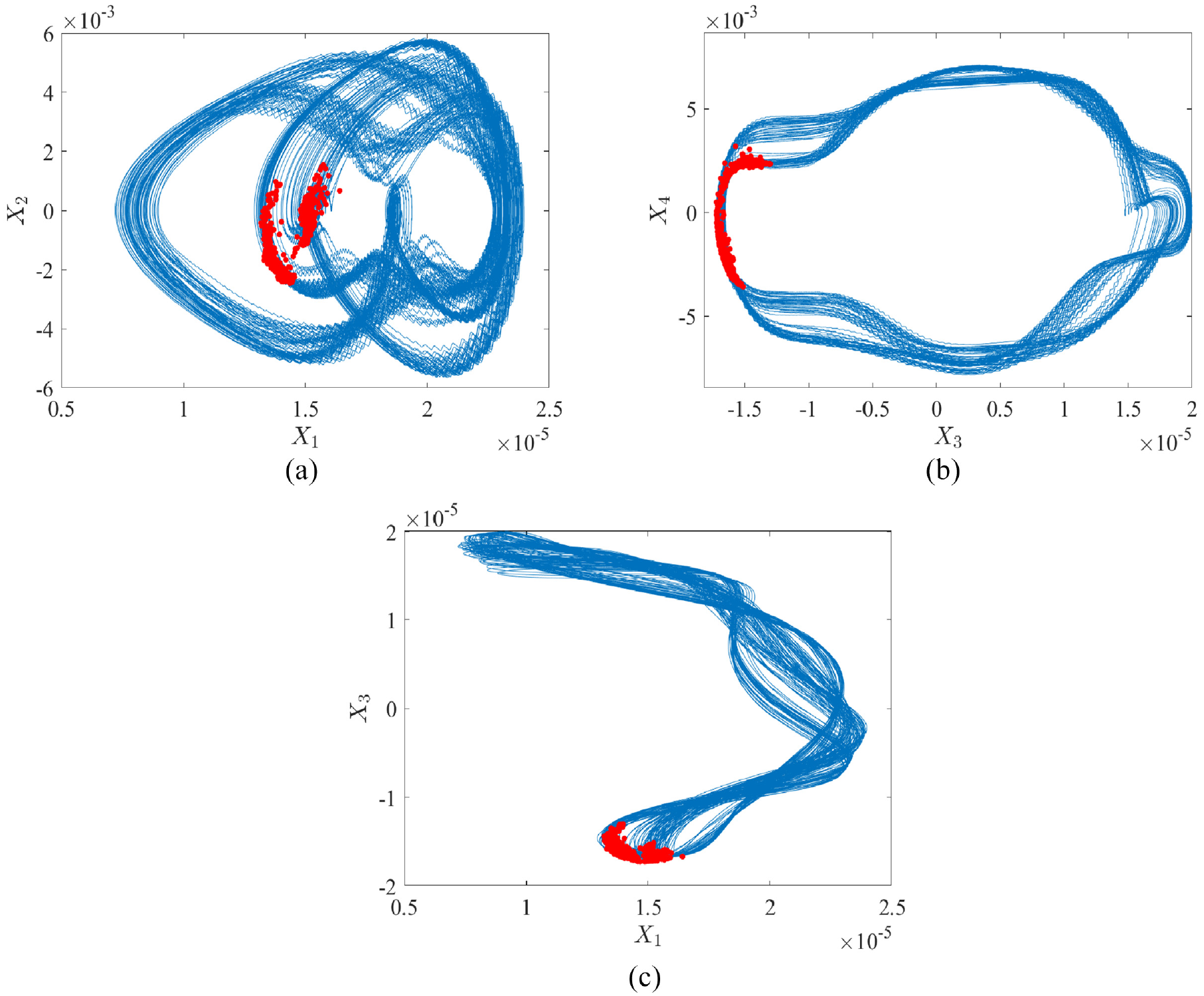
Phase space plot (
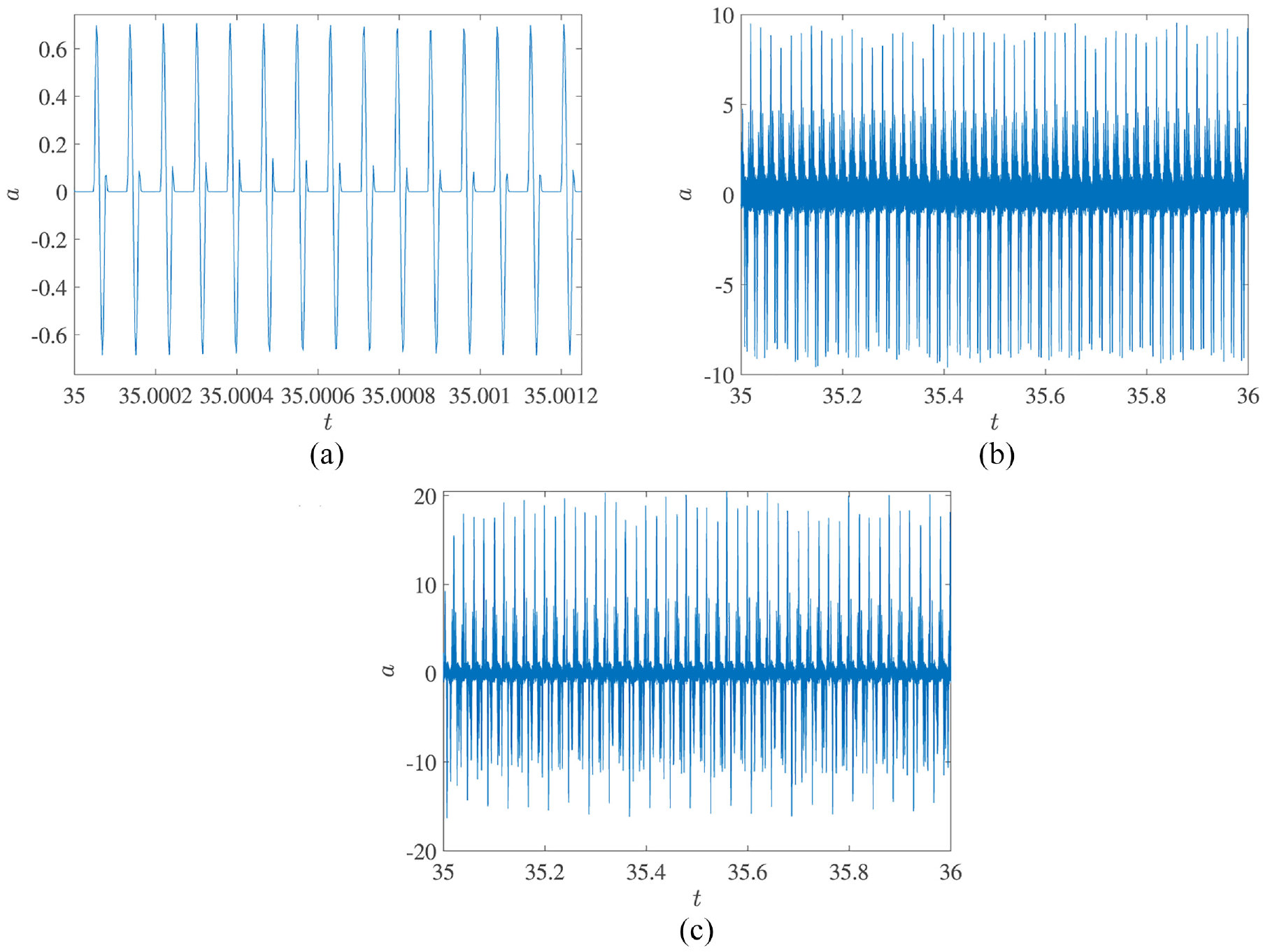
Time waveform for horizontal acceleration for (a)
Defect characterization using entropy measure-based learning algorithm
The entropy measures are computed from measured time histories of the vibration signals of a rolling bearing under four different vibration severities, classified viz. good (acceptable), fair, rough (above alarm limit), and very rough (danger to failure). The analysis is carried out with respect to defects in the outer race, inner race, and other kinds of defects and are discussed separately in the following subsections. In this work, the vibration signal corresponding to a new fault-free bearing classified as “very good (desirable),” as shown in Figure 20, is taken as a benchmark signal as required for computing the Kullback–Leibler entropy.
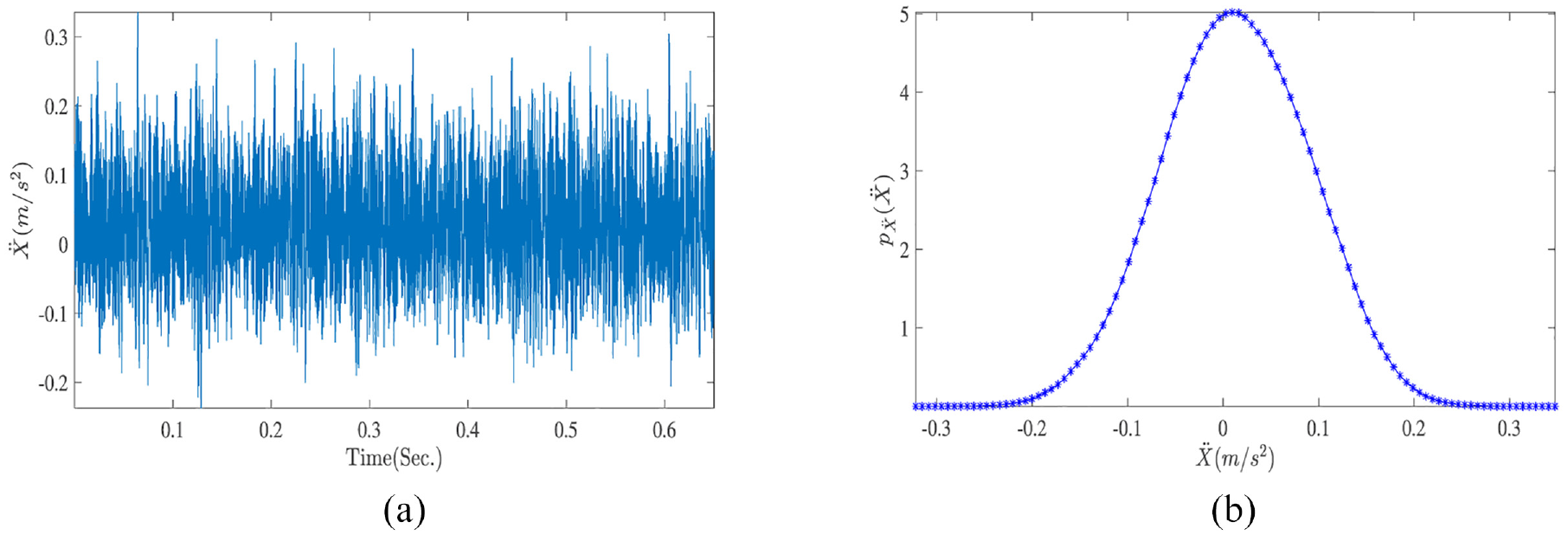
(a) Vibration time waveform and (b) pdf corresponding to new and defect-free REBs.
Analysis with a defect on the outer race
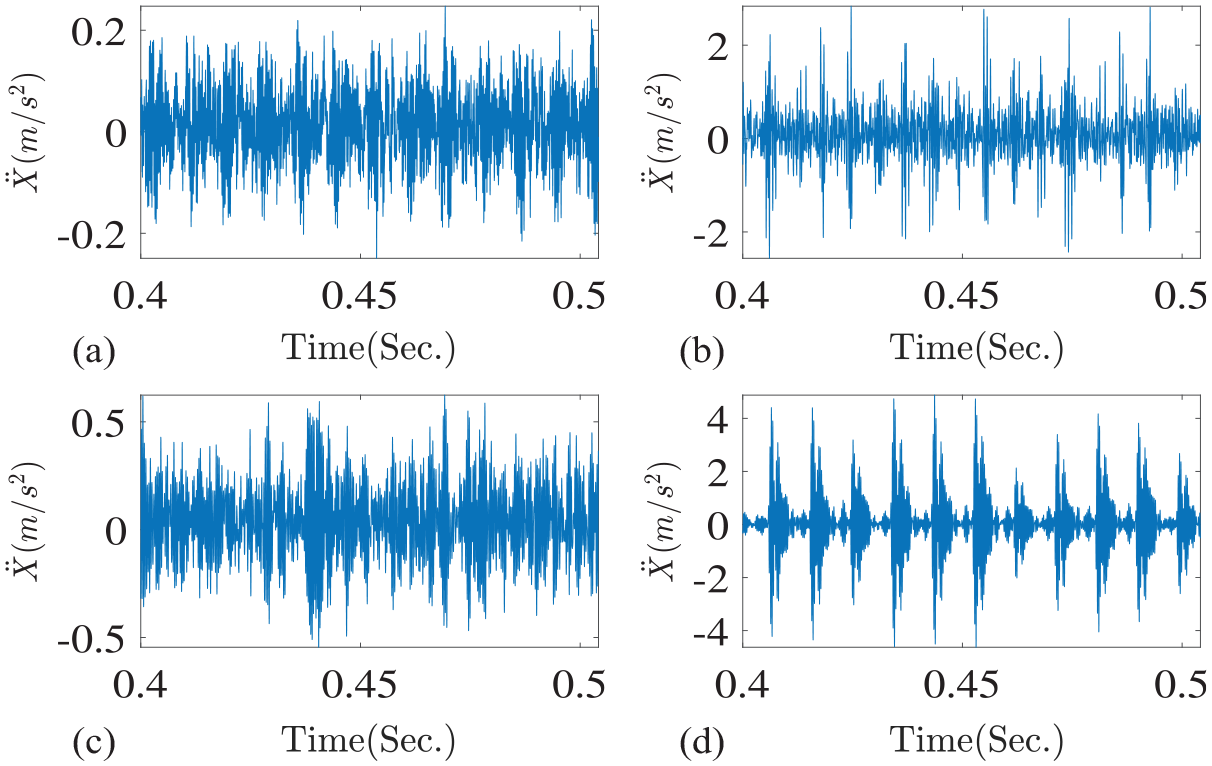
Rolling bearing having localized outer race defect is considered. For better signal transmission and to minimize signal attenuation, the accelerometer was mounted just above the defect position on the outer race. Figure 21 presents a sample of vibration (acceleration) waveform corresponding to each of the different fault severity of the outer race fault for a test rolling bearing. The impact vibration caused by the localized fault is reflected in the time domain waveform.
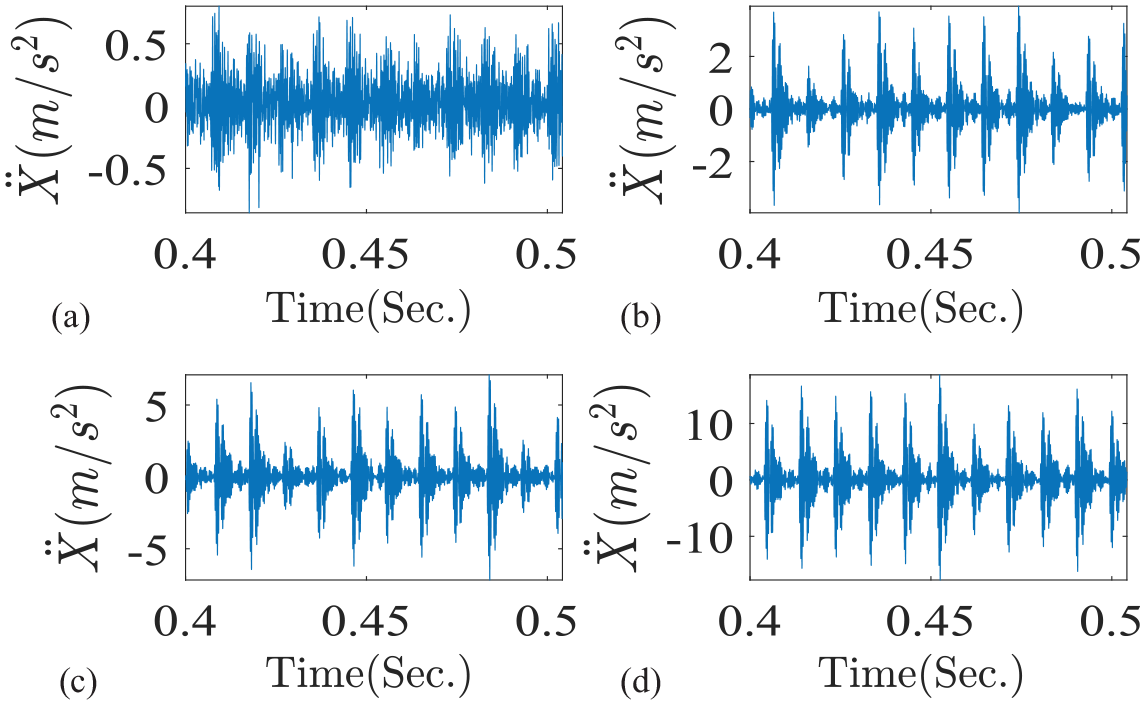
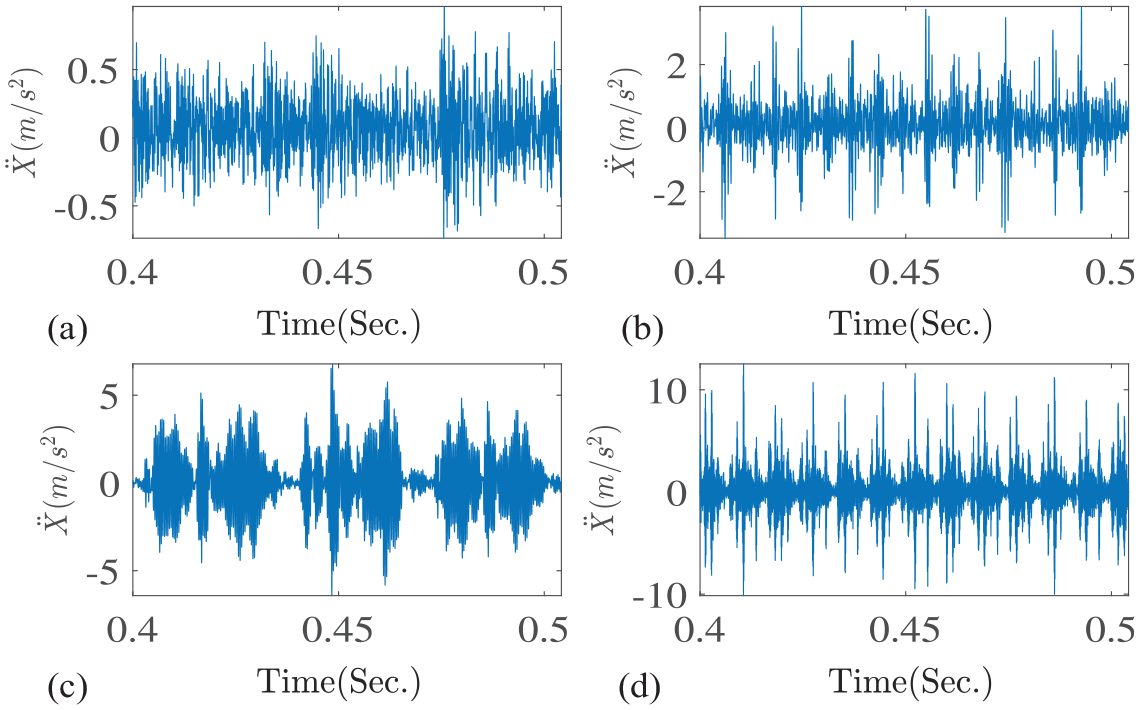
Time waveform for bearing outer race fault conditions with different sensitivities in a rolling element bearing: (a) good, (b) fair, (c) rough, and (d) very rough.
The large transient vibration impulses of high energy are released whenever the rolling element passes over the defect site, and thus, time histories of the vibration signal have a periodic impact time corresponding to the defect frequency (BFPO). This defect frequency is a characteristic of the bearing element. The intensity and the peak value of the vibration signals increase with an increase in defect severity. However, in many industrial applications, having a high level of operational background noise can attenuate the spike due to a low signal-to-noise ratio, and these spikes may not always be visually evident in the acceleration time histories. Figure 22 presents the pdf of the four acceleration time histories corresponding to Figure 21.
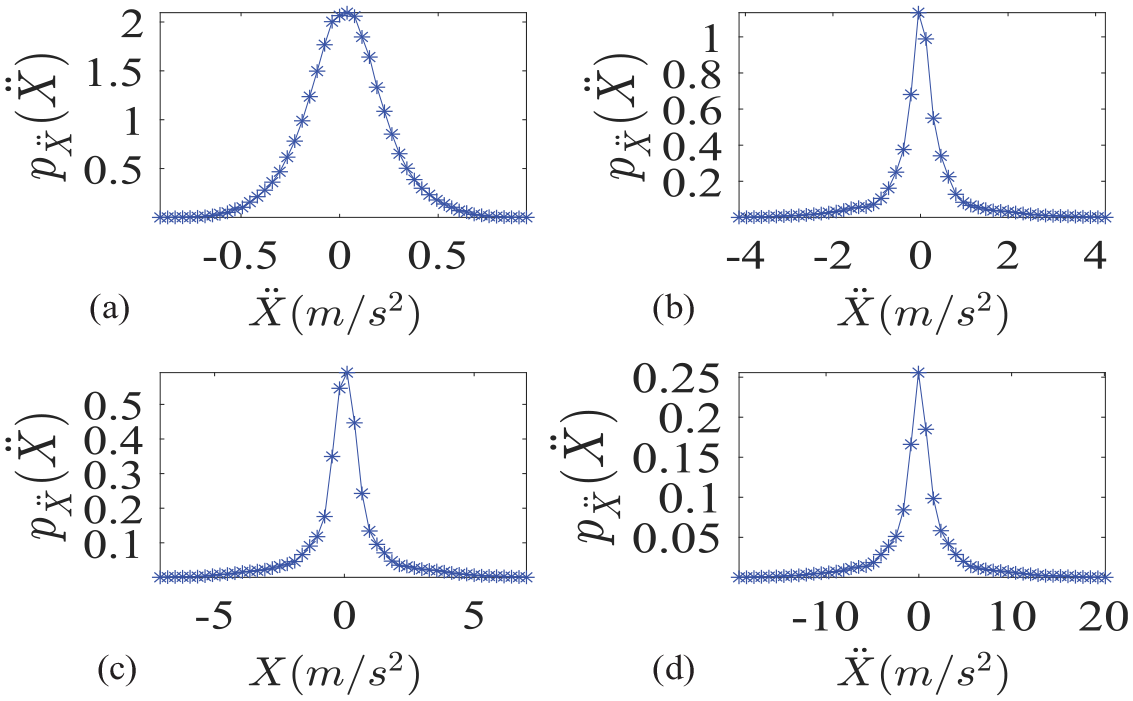
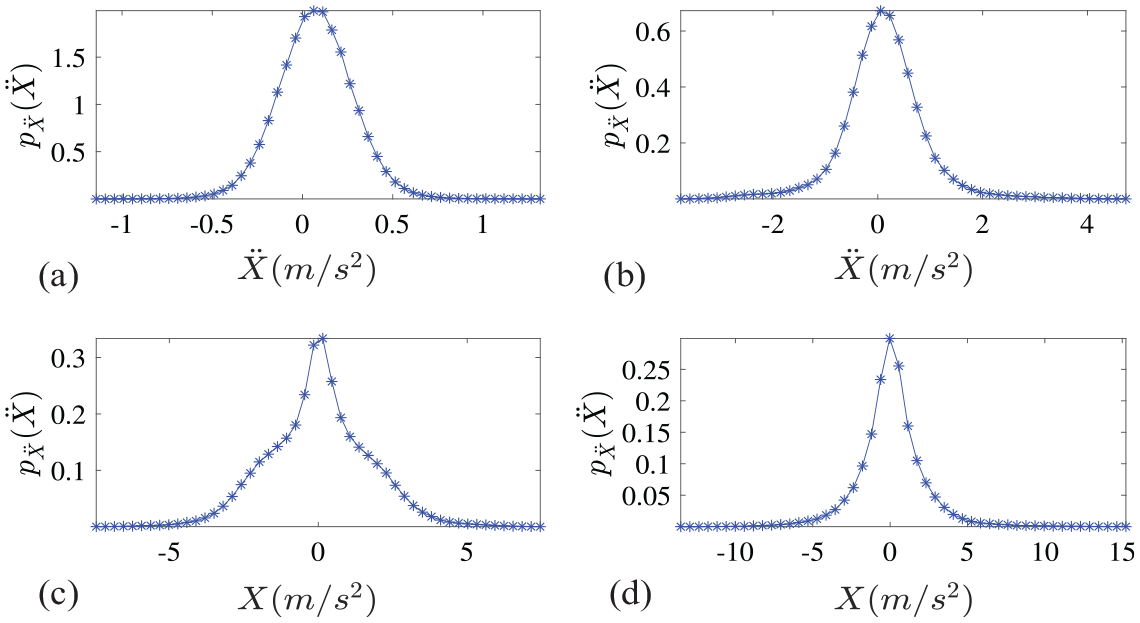
PDF of vibration signal for bearing outer race fault conditions with different sensitivities in a rolling element bearing (a) good (b) fair (c) rough (d) very rough.
As the defect progresses, periodic impulses appear in the vibration signature. This led to the pdf displaying increasingly non-Gaussian characteristics, as seen in Figure 22. Initially, the non-Gaussian characteristics were quite pronounced (Figure 22(b)). However, as more and more periodic impulses are generated, the pdf again appears to have Gaussian characteristics.
Next, the KL entropy and the Shannon entropy measures are computed. For each severity category,
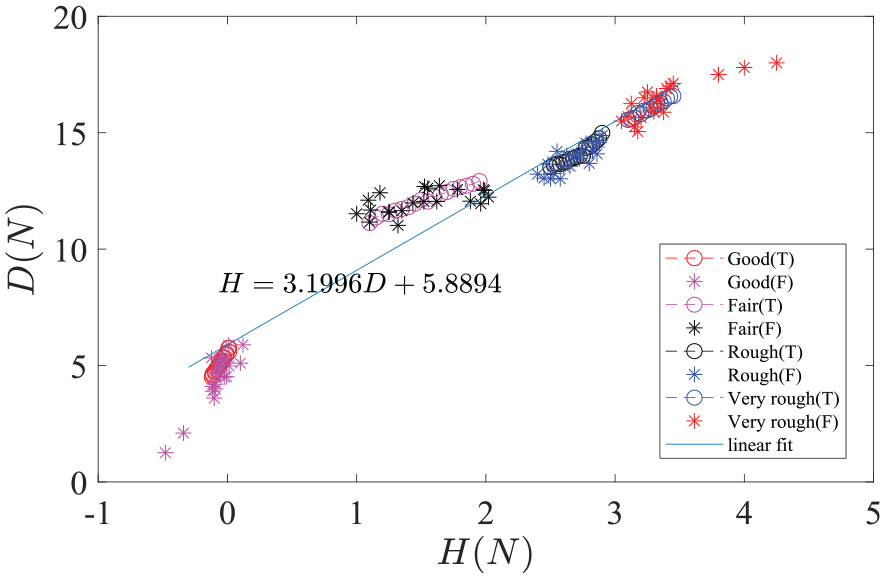
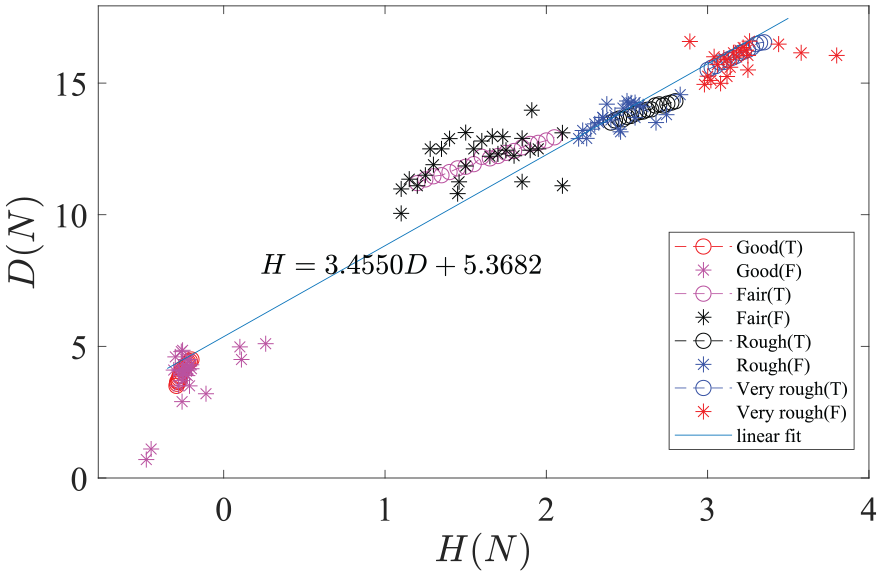
Shannon–Kullback entropy characteristics for bearing outer race fault conditions with different sensitivities in a rolling element bearing (T = theoretical time waveform and F = field data).
Both Kullback and Shannon entropy start with low values for healthy bearings and progressively increase as the bearing degradation advances to fair, rough, and very rough bearings. It is observed that there exists a one-to-one correlation between vibration severity and entropy. Lower numerical values of both the entropy measures—
Furthermore, to check the accuracy and effectiveness of the proposed entropy-based measure, an ANN using a multilayer perceptron (MLP) classifier is used with the following 1 to 9 features: mean (
Some of statistical parameters associated with a typically noisy vibration signal (
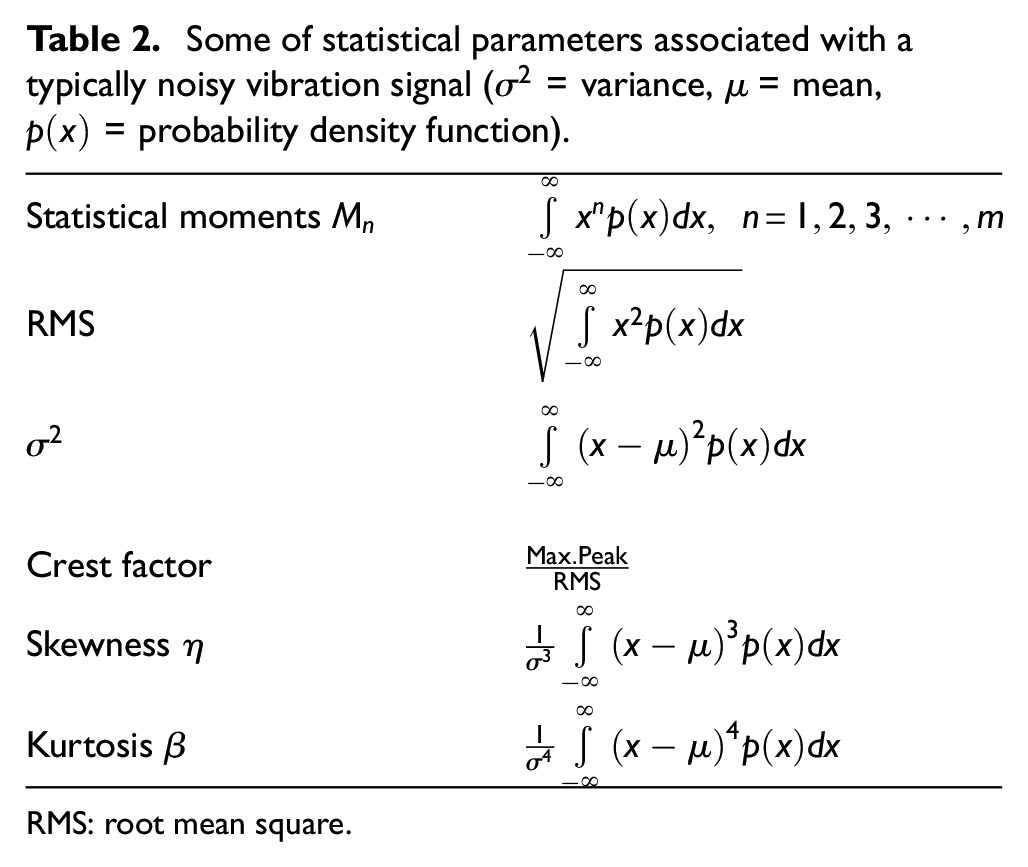
RMS: root mean square.
Analysis with a defect on the inner race
Next, the rolling bearing having a defect on the inner race is considered. In the case of an inner race defect, the vibration signature is quite complicated due to varying loadings on defect sites and the ball. Figure 24 illustrates the experimental acceleration sample waveforms with inner race defects in the REBs under different defect severity conditions for the test rolling bearing. During the experiment, the acceleration time waveforms are captured on the top of the defective test bearing housing.
Time waveform for bearing inner race fault conditions with different sensitivities in a rolling element bearing: (a) good, (b) fair, (c) rough, and (d) very rough.
A series of short bursts of high energy of varying amplitude is observed in Figure 24. For the inner race defect, the defect keeps moving in or out of the load zone once in a revolution. Large amplitude vibrations are generated while defects are in the load zone, and weaker vibration signatures are produced while the defects are outside the load zone. Therefore, the inner race gets modulated with the shaft rotating frequency. The amplitude modulation with the shaft rotating frequency diminishes the defect amplitudes for some impulses. Figure 25 presents the pdf of the four acceleration time histories corresponding to Figure 24.
PDF of vibration signal for bearing inner race fault conditions with different sensitivities in a rolling element bearing: (a) good, (b) fair, (c) rough, and (d) very rough.
The Shannon and the KL entropy measures are computed. These data points are plotted in the
Shannon–Kullback entropy characteristics for bearing inner race fault conditions with different sensitivities in a rolling element bearing (T = theoretical time waveform and F = field data).
Figure 27 presents the behavior obtained using the value of standard statistical parameters using the acceleration time waveform. The result presents the average value of
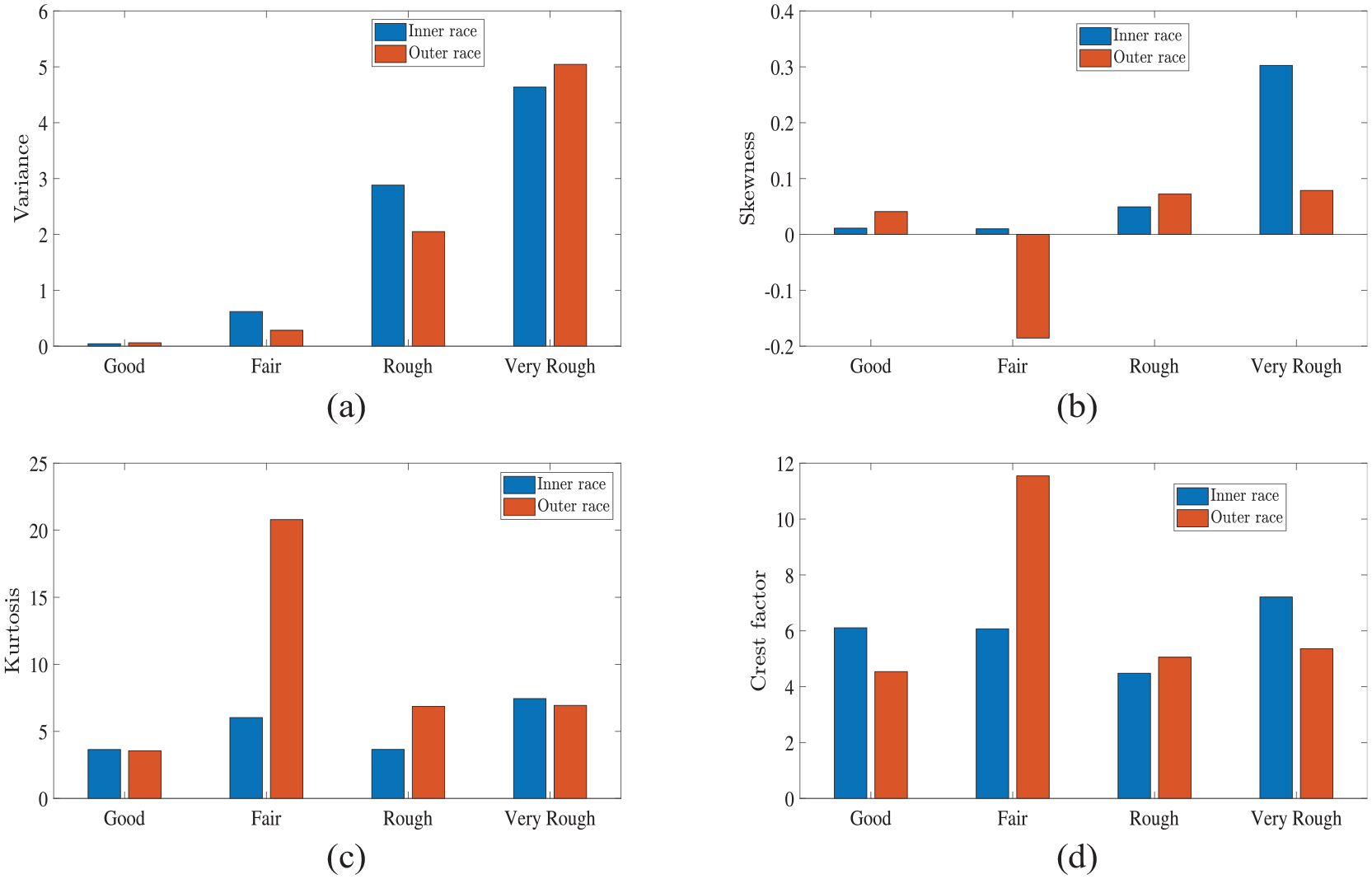
Comparison of statistical parameters (a) variance, (b) skewness (c) kurtosis, and (d) crest factor for various defect conditions at inner and outer race .
Analysis with different kinds of defects
In this section, three different kinds of bearing faults—(a) inner race defect, (b) outer race defect, and (c) rolling element defects—all having similar defect severity are analyzed. Since bearing vibration data for different fault types with similar severity are difficult to obtain from the field, most of the vibration signature is obtained theoretically using numerical simulation or experimentally in the workshop. The corrosive pitting defects of diameter
Time waveform for normal as well as various fault conditions in a rolling element bearing: (a) very good, (b) inner race defect, (c) rolling elements defects, and (d) outer race defect.
Using numerical simulation for Equation (14), 12 vibration signatures for different defect sizes were recorded for each bearing fault condition. In Figure 28, it can be seen that vibration amplitude is sensitive to the bearing fault position, and these characteristics help to group the Kullback–Shannon entropy. As discussed earlier, more vibration energy is released for outer race defects under similar fault sizes. Figure 29 presents the pdf of the four acceleration time histories corresponding to Figure 28. For the similar fault size, localized surface defect at the outer race induces more non-Gausianity in the acceleration time waveform. The average value of standard statistical parameters such as RMS, standard deviation, kurtosis, crest factor, and skewness is given in Table 3. Once again, the variation of these statistical parameters with respect to fault location is complicated. Hence, these measures cannot be reliably used to identify the fault position or their severity for different types of faults.
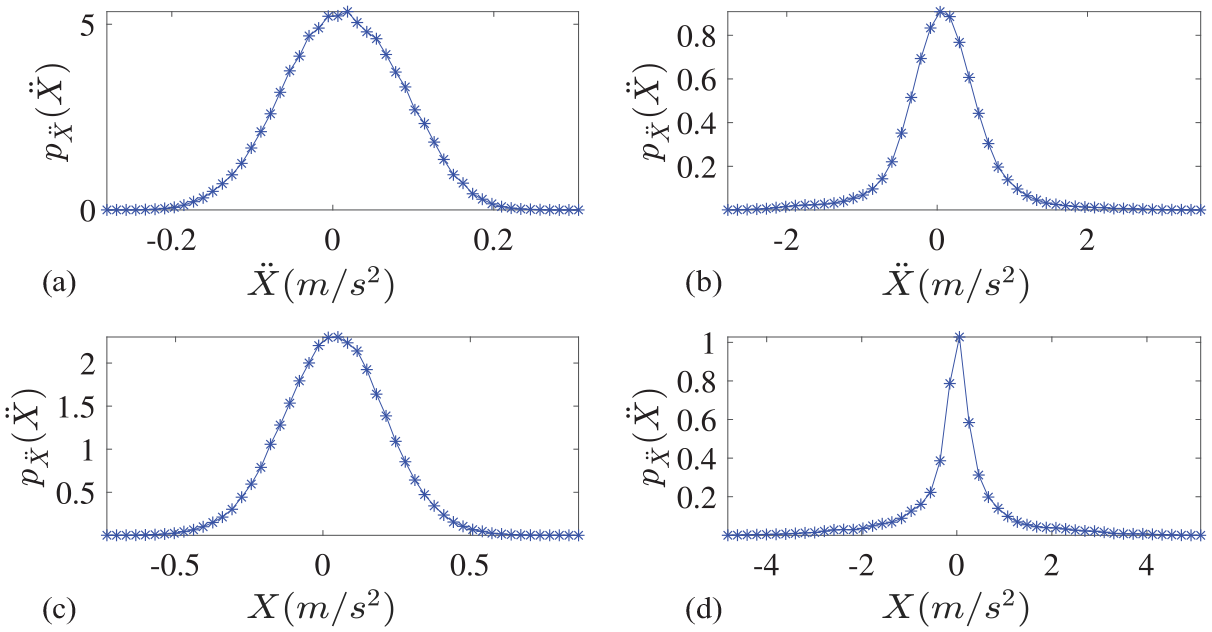
PDF of vibration signal for normal as well as various fault conditions in a rolling element bearing: (a) very good, (b) inner race defect, (c) rolling elements defects, and (d) outer race defect.
Comparison of statistical parameters with respect to the position of the localized defect.
RMS: root mean square.
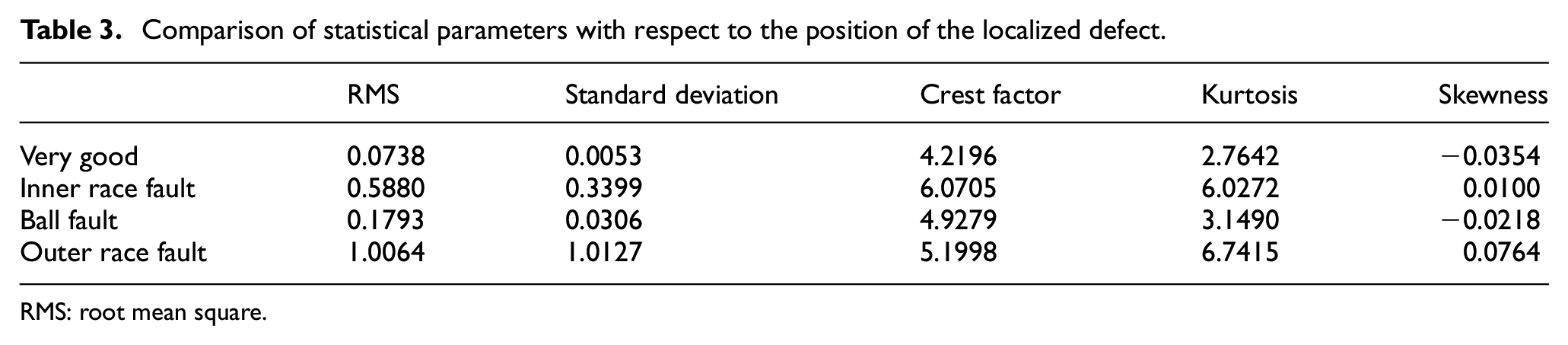
The Shannon and the KL entropy measures for very good bearing and those corresponding to the defective outer race, inner race, and rolling element with defects of similar size and severity are shown in Figure 30. It can be seen that similar fault sizes at different locations also have better inter-class separation for Kullback–Shannon characteristics. For healthy bearings, Shannon entropy is negative, and both Kullback and Shannon entropy measures increase with an increase in the vibration amplitude. Hence, it is possible to accurately identify the different bearing fault types using the Kullback and Shannon entropy measures.
Shannon–Kullback entropy characteristics for normal as well as various fault conditions in a rolling element bearing (T = theoretical time waveform and W = workshop data).
For comparison purposes, vibration waveforms corresponding to different fault types, as shown in Figure 28, are also investigated using various existing modern signal processing techniques. Figures 31(a)–(d) present the RPs for various fault locations corresponding to the time series shown in Figure 28. The RPs for all the cases are computed for approximately
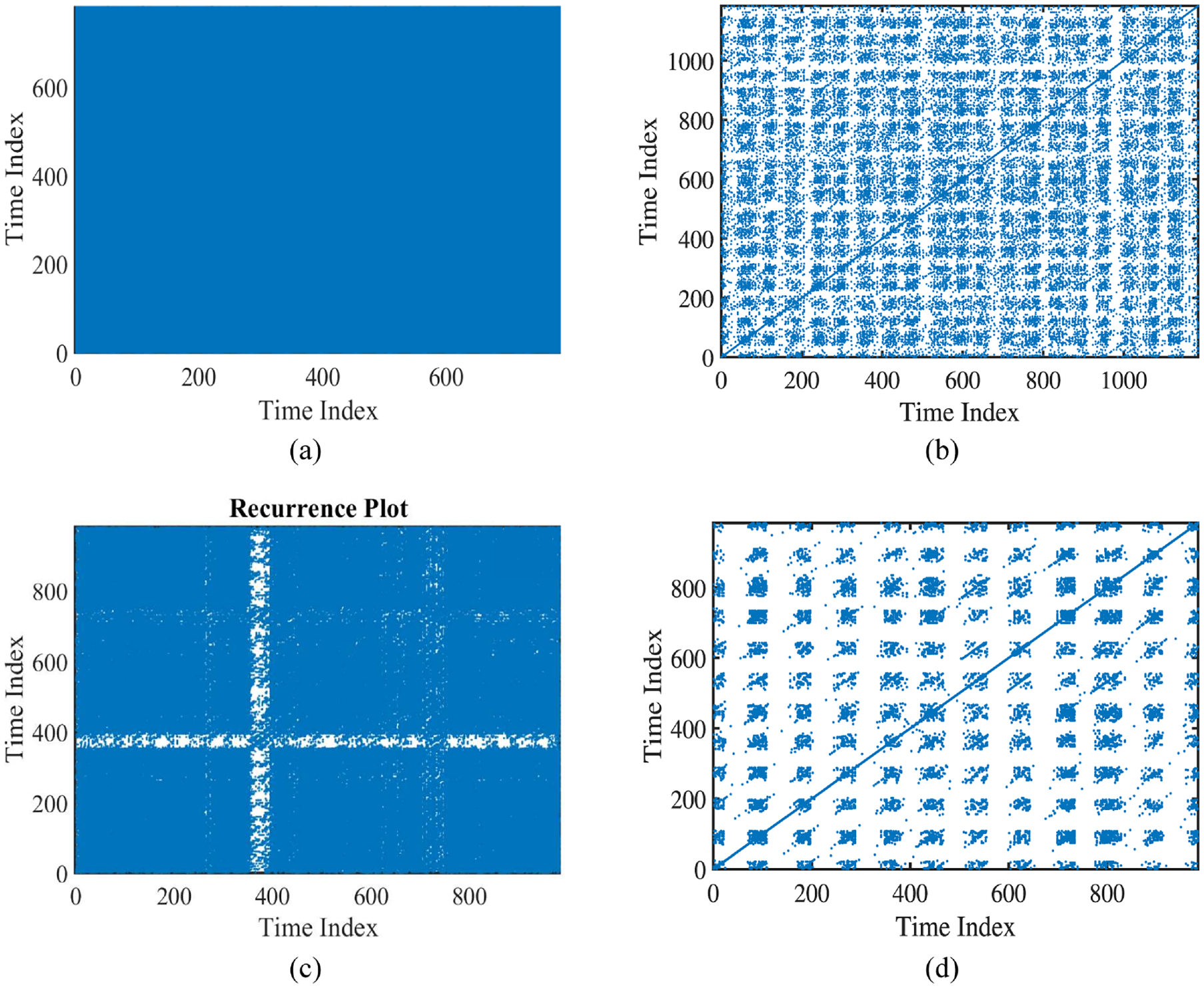
Recurrence plot for normal as well as various fault conditions in a rolling element bearing: (a) very good, (b) inner race defect, (c) rolling elements defects, and (d) outer race defect.
Figures 32(a)–(d) present the WT scalogram for various fault locations corresponding to the time series shown in Figure 28. The number of distinct peaks observed in the scalogram can be an excellent feature to differentiate between inner race faults, outer race faults, and normal conditions. However, except for the scalogram of the case of the outer race fault (Figure 32(d)), which shows 11 distinct peaks during the
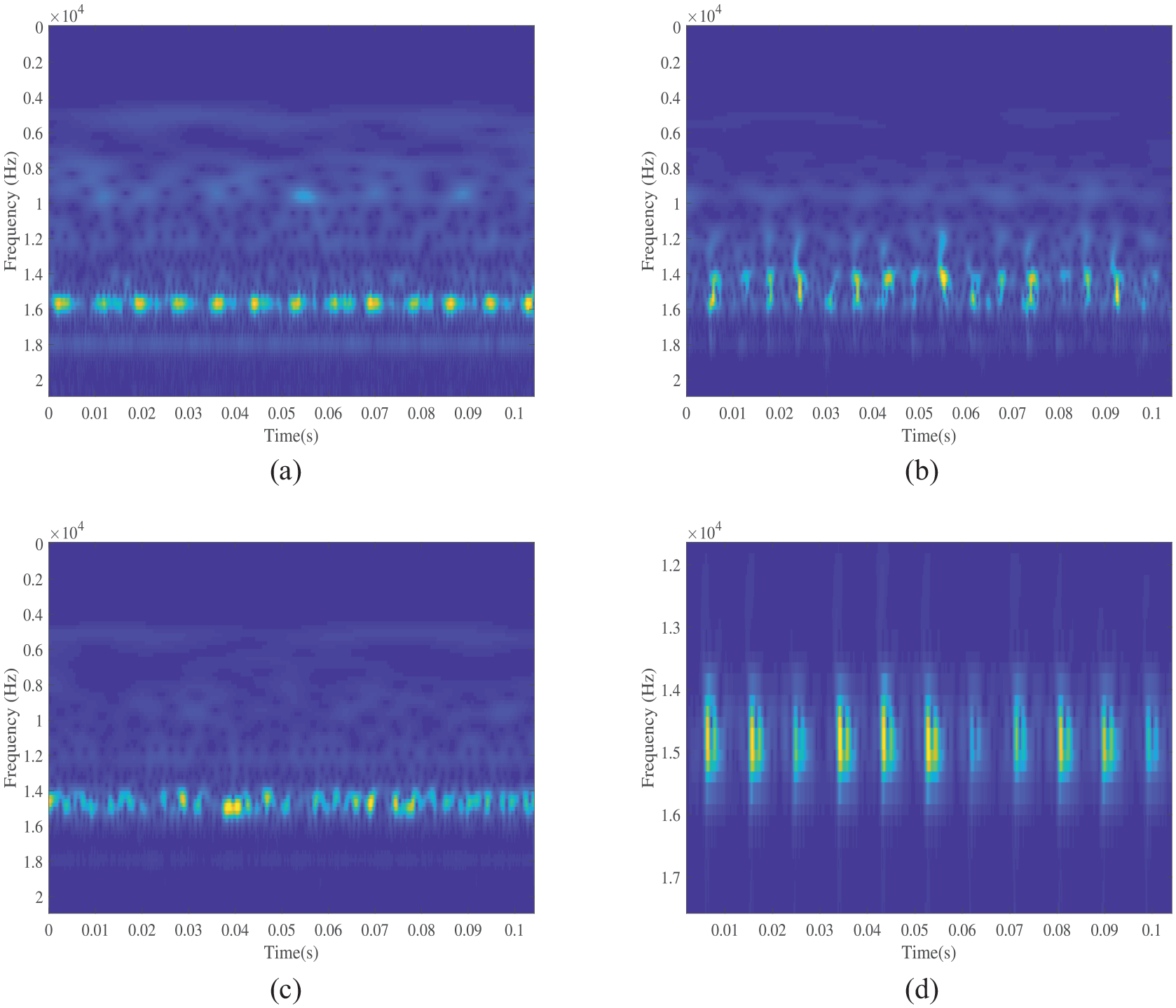
Wavelet plot for normal as well as various fault conditions in a rolling element bearing: (a) very good (b) inner race defect, (c) rolling elements defects, and (d) outer race defect.
Conclusions
The present work presents a new approach based on Kullback–Leibler divergence and Shannon entropy to diagnose different fault types and severities of rolling element bearings (REBs) with real-time computational performance. Shannon–Kullback entropies for various types of REB faults are calculated. Results indicate that for a given operating condition, each type of fault has a well-defined entropy measure and entropies of faulty bearing, ranging from “very good” to “very rough,” lie on a nearly linear locus. The results show that the proposed method is also well suited to weak time waveforms where defect features are masked by the background noise. Application with the field and experimental data shows that three types of bearing faults have been effectively identified using the proposed techniques. Results of the proposed method are also compared with existing traditional methods, such as statistical measures of vibration signals, and the effectiveness of proposed entropy measures in characterizing rolling bearing defects is established. Compared with the state-of-the-art fault identification approaches, the proposed method offers scope for a different diagnostic tool for REB fault detection. Combined with the other traditional vibration condition monitoring techniques, the proposed entropy-based diagnosis tool promises to be very effective and robust, especially for noisy vibration signals. In addition to the field and workshop data, a nonlinear vibration model under the combined effect of the unbalance and PWN has been developed to obtain the acceleration time waveform. An adaptive time-stepping numerical integration combined with the Brownian tree is used to obtain the nonlinear vibration response. Nonlinear random vibration analysis for the rolling element bearing helps to predict the effect of various sources of nonlinearity, such as Hertzian contact force, internal clearance, surface waviness, and localized defects among others under the combined effect of unbalanced force and non-Gaussian random excitations.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.