
Abstract
This article introduces a dynamic weighted graph neural network (DWGNN) for precise reconstruction of impact force time histories under both fault and nonfault conditions in sensor networks. The DWGNN model integrates a one-dimensional convolutional neural network for extracting features from sensor signals and a graph neural network that dynamically adjusts its weight matrix based on node feature similarity, thereby reducing the impact of faulty sensor signals. Incorporating physical constraints, such as the distances between impact and sensor locations, improves the model’s performance. This innovative approach enables the accurate reconstruction of impact forces using only nonfaulty training data. Experimental validation on a stiffened metal plate, with mixed artificially generated and real measured signals, demonstrates the DWGNN model’s high accuracy and robustness. Data augmentation with fault signals significantly enhances the model’s accuracy under challenging fault conditions, proving the DWGNNs potential for real-time structural health monitoring and fault diagnosis in complex engineering structures.
Keywords
Introduction
Impact force identification, which aims to locate and reconstruct the force history of an impact event, 1 is crucial in the field of structural health monitoring. 2 It provides valuable information for assessing damage and planning maintenance of structures such as bridges, buildings, and aircraft. However, this task is challenging due to complexities such as sensor noise, sensor failure, and unknown impact locations. While many traditional methods, regularization methods,3–6 basis function methods,7–9 and iterative methods,10–12 have addressed the time history identification problem under known impact locations or complex model characteristics. However, it is foreseeable that when the impact location is unknown or the structural characteristics of the model are complex, the transfer functions between the impact location and sensors become either unavailable or highly inaccurate. Consequently, under circumstances where both the transfer function matrix and the impact load are unknown, most traditional methods proposed in the literature seem incapable of simultaneously and consistently solving both the localization and impact load history reconstruction problems using linear governing equations. To the best of our knowledge, only a few methods have been developed to address these challenges. However, they often rely on prior knowledge and assumptions to constrain the problem for numerical solutions. For instance, they may assume that the impact load originates from one of several candidate locations and that the spatial distribution of the impact locations shares the same characteristics (e.g., sparsity) as the excitation signals.13–17
With the recent advancements in deep learning, neural networks have demonstrated significant potential in the field of force identification, particularly when traditional methods face challenges. Data-driven neural network approaches, such as convolutional neural networks (CNN) and recurrent neural networks (RNN), utilize sensor signals as input and produce force time histories or impact locations as output. These networks can learn complex transfer function relationships from sensor signals. For instance, Zhou et al. 18 used a deep RNN for impact force identification on composite plates. Chen et al. 19 developed a convolutional-recurrent encoder–decoder neural network determine the impact force’s position as well as its temporal history. Yang and Jiang 20 proposed a deep dilated convolution neural network for the purpose of dynamic force reconstruction. Zhou et al. 21 introduced a gated temporal convolutional network-based method for impact force identification, capable of both localizing and reconstructing impact forces. While these data-driven methods show promise, they often struggle with handling complex spatial relationships and can be sensitive to sensor faults and noise. Wang et al., 22 based on the ultrasonic automatic diagnosis method enhanced by continuous wavelet transform and transfer learning deep convolutional neural network, evaluated the compression damage of concrete specimens under temperature changes and achieved good results.
Recently, graph neural networks (GNNs) have emerged as a powerful tool for modeling complex relationships in structured data. Unlike traditional data-driven neural networks, GNNs can naturally incorporate spatial information by representing the problem as a graph, where nodes and edges capture the relationships between different entities. This makes GNNs particularly well-suited for tasks involving irregular data structures and spatial dependencies, such as those found in structural health monitoring. For example, Li et al. 23 introduced multireceptive field graph convolutional networks for machine fault diagnosis, demonstrating enhanced accuracy. Qiu et al. 24 developed a denoizing GNN-based method for hydraulic component fault diagnosis, improving noise resilience. Atkinson et al. 25 applied convolutional GNNs for anomaly detection, highlighting their effectiveness in identifying anomalies in complex systems. Tsialiamanis et al. 26 explored GNNs in population-based Structural Health Monitoring (SHM), showing promising results in data-driven engineering applications.
In our previous work, 27 we leveraged GNNs for impact force localization and reconstruction, demonstrating their effectiveness in addressing some of the limitations of purely data-driven models. Unlike purely data-driven neural network models, our GNN is more model-driven with a graph structure. 28 When nodes and edges in the graph are assigned specific features, they can be utilized in neural network computations. In the Distance-assisted Graph Neural Network (DAGNN) model, the relationships between graph node features are associated with real physical distances, enabling the DAGNN model to learn from both the spatial and temporal information of dynamic structural responses. However, as the DAGNN model is applied to more complex and practical conditions, several architectural issues arise. The fixed window length for truncating sensor signals and the fixed admittance matrix for quantifying the graph structure in DAGNN simplify feature extraction and exchange, making it less adaptable to increasingly complex working conditions. 29
Furthermore, due to complex working environments, sensors often experience faults caused by external factors, leading to partial or complete loss of functionality. 30 These fault signals are often buried in massive data, making detection difficult. If faulty sensor signals are used without corrective measures, they can cause significant problems in sensor-based information systems.31,32 Currently, there is limited research on impact force identification under sensor fault conditions, although it is a practical and meaningful issue. Due to its simple and fixed architecture, the DAGNN model cannot effectively identify faulty sensor signals or reconstruct impact force under sensor failure conditions.
Therefore, this work hope to propose a GNN-based model named dynamic weighted graph neural network (DWGNN) to reconstruct the time history of impact force in both nonfault and fault conditions in sensor networks, even without the presence of fault signals in the training dataset. Compared to the DAGNN model, the DWGNN model replaces the fixed window operation with a one-dimensional convolutional neural network (1D-CNN) to extract features from sensor time signals, and a GNN equipped with a weight matrix that dynamically adjusts in response to different fault situations. The weight matrix of the GNN is calculated by the similarity between node features, enabling the model to adapt to different fault situations. Additionally, the inclusion of the fault signal in the training dataset, achieved via data augmentation, can substantially enhance the recognition accuracy of the DWGNN model under extreme fault conditions.
The rest of this article is organized as follows. “Methodology” section gives the architecture of the DWGNN model for impact force time history reconstruction. In “Experiment validation” section, experiments are carried out on stiffened metal plates to verify the generalization ability of DWGNN. In “Time history reconstruction results with nonfaulty training signals” section, the results of time history reconstruction using the trained DWGNN model are given, and different unknown impact positions are analyzed. “Time history reconstruction results with faulty training signals” section discusses the time history reconstruction results of DWGNN model for various fault conditions when the training dataset contains fault sensor signals. “Conclusion” section draws some important conclusions.
Methodology
The aim of this section is to mathematically analyze the computational process of the DWGNN. Specifically, it examines how DWGNN uses acceleration sensor signals as input and load time histories as output, achieving accurate reconstruction of impact forces using only nonfaulty training data. To provide a more intuitive explanation of the DWGNN model architecture, the primary modules and their corresponding sections are illustrated as shown in Figure 1.

Analysis of the computational process of DWGNN.
“The governing equation for force identification” section covers signal acquisition, detailing the collection of acceleration sensor signals and force hammer signals. “Types of sensors fault” section addresses common sensor fault types, presenting and analyzing the impact of four types of sensor faults on acceleration signals. “One-dimensional convolutional neural network feature extraction” section focuses on the 1D-CNN, which extracts features from time-domain acceleration signals. “Dynamic weighted graph construction” section discusses the construction of dynamic weighted graph structure, where time-domain features are analyzed for similarity and assigned weights. Finally, “Architecture of DWGNN model” section delves into GNN computation, which is used to reconstruct the impact force time histories.
The governing equation for force identification
For simplicity of description, a 2D stiffened metal plate is shown in Figure 2. It is evident that impact-induced signals are measured by

Impact force identification of 2D stiffened metal plate structure with uncertain sensors.
The following is the governing equation of force identification in the time domain for the system indicated above in Figure 2:


where
Types of sensors fault
In recent years, many scholars have categorized sensor faults based on the characteristics of sensor data in studies related to sensor fault classification. Sensor faults can arise from external or internal causes. External factors include environmental conditions such as temperature, humidity, pollution, and corrosion. Among the studies on sensor fault classification, Ni et al. 33 provided one of the most detailed analyses, classifying sensor faults based on data characteristics. They also compiled a comprehensive list of common sensor fault data, offering an in-depth analysis of fault types, durations, and impacts. This work provides valuable guidelines for future research.
Overall, sensor faults can be broadly divided into two categories: incipient (slowly developing) faults and abrupt (sudden) faults. 31 For aircraft structures and operating conditions, Samara et al. 34 extensively discussed three types of abrupt faults: complete failure, bias failure, and snowflake noise. This article extends the discussion to include incipient failures, specifically drift faults. The “incipient fault” indicates that the sensor system is operating abnormally or in an unstable state. 29 While the sensor continues to function, the data it produces is inaccurate. The errors introduced by incipient faults may initially be small and slow-changing, but they gradually increase over time, potentially leading to severe failures if not addressed.
To comprehensively analyze sensor faults, this study considers four fault types: complete fault, bias fault, drift fault, and snowflake noise. Examples of these fault types, along with a comparison to correct sensor signals, are presented in Figure 3. To simulate realistic fault conditions, the following assumptions are applied in this study: (i) the four fault types occur randomly in any sensor, (ii) the duration of fault signals is arbitrary, reflecting the randomness of sensor faults, (iii) the maximum amplitude of the fault signals is set equal to the maximum value of the response signals to ensure a consistent evaluation of fault impact.

Examples of: (a) Correct sensor signal, (b) complete fault, (c) bias fault, (d) drift fault and (e) snowflake fault.
Complete fault, as shown in Figure 3(b), is one of the most frequent faults in sensors, where a constant value takes the place of the sensor’s data value. Complete fault adopted in this work is mathematically expressed as follow:

where
Bias fault, as shown in Figure 3(c), is mainly caused by the sensor suddenly receiving a bias current or voltage, resulting in a constant error between the sensor measurement and the true value. Bias fault is mathematically expressed as follow:

where
Drift fault, as shown in Figure 3(d), meaning that the offset or gain parameter varies over time when the sensor’s performance deviates from the initial calibration formula. Drift fault is mathematically expressed as follows:

where
Snowflake fault, as shown in Figure 3(e), is mainly caused by the sensor’s susceptibility to noise from the environment, hardware, and internal sources. The primary sources of internal noise are circuit components like amplifier noise and sensor noise. Artificial or external interference with the sensor circuit is the source of external noise. While noise is a typical occurrence in sensor data, anomalous noise can lead to issues with sensor signals by masking the underlying signal. In this article, random data with the same mean and variance as the true signal are set as snowflake noise. Snowflake fault is mathematically expressed as follows:

where
One-dimensional convolutional neural network feature extraction
One-dimensional-CNNs architectures are proposed to extract features and classify the raw time-resolved signals. 35 One-dimensional-CNN integrates the feature extraction, feature transformation, data fusion, and classification processes into a single framework while carrying out 1D convolution and dimensionality reduction procedures. It works mainly on two primary operations: convolution and pooling. The former is adopted to extract features from a given dataset, and the latter is adopted to lessen the number of parameters and introduce translation invariance. 36
Mathematically, the operation of a 1D convolution can be expressed as follows:

where

where
As shown in Figure 4, this article proposes a two-layer 1D-CNN architecture for feature extraction. For illustration, the first layer consists of two convolutional kernels with a size of 32 and a stride of 4, while the second layer comprises four convolutional kernels with a size of 16 and a stride of 4. The 1D-CNN takes the acceleration sensor signals

Proposed 1D-CNN architecture for feature extraction.
To demonstrate the feature extraction performance of the 1D-CNN more intuitively, the five groups of acceleration sensor signals in Figure 3 are separately input into the 1D-CNN, and the five groups of time-domain features are output as shown in Figure 5. The acceleration signals undergo feature extraction and dimension reduction simultaneously through two convolutional layers and pooling layers. Moreover, by using the average pooling layer instead of the traditional fully connected layer at the end, the 1D-CNN avoids overfitting and preserves the intuitive features of the signals, such as the rising edge, amplitude, and trend. It can be seen that the fault signals and the correct signals have obvious differences in the feature maps, which can help us to provide a basis for judging whether the signals are faulty or not from the perspective of the similarity between the time-domain features output by the 1D-CNN.

Time-domain features of acceleration sensor signals: (a) Correct signal, (b) complete fault, (c) bias fault, (d) drift fault, and (e) snowflake fault.
Dynamic weighted graph construction
An undirected graph

The dynamic weighted graph construction of the system.
Therefore, according to graph theory, the original adjacency matrix

where
It is noteworthy that the element values in the original adjacency matrix
Furthermore, this article first performs max-normalization on each group of time-domain features

Then, the Euclidean distance

where the larger the Euclidean distance
Thus, a Euclidean distance matrix

where
The upper triangular and nondiagonal elements of Euclidean distance matrix

where Softmax function is used to normalize the elements as follows:

where the element values in

From Equations (8)–(13), it can be assumed that when all sensors are functioning correctly, the Euclidean distances of all features in the matrix
By dot multiplying the original adjacency matrix

where
Then, a dynamic weighted degree matrix

where the element of

In general, we obtain the node effective information weights by mapping the similarity based on the Euclidean distance of the temporal features output by 1D-CNN, which replaces the topological connection relationships between nodes in the graph structure and helps DWGNN perform better reconstruction under normal and fault data.
Architecture of DWGNN model
A three-layer DWGNN model can be proposed. The interaction layer is the first layer. This layer uses the dynamic graph structure, which includes the degree matrix

where
The second layer is a reconstruction layer. It reconstructs each node embeddings

where

where

where
The third layer of the DWGNN model takes the output

where the graph’s node features are fused and decoded using the trainable weight matrix
Finally,

where the pr term is added as the denominator to the normal modified mean square error loss function between the reconstructed force time history
The DWGNN model flow graphic for impact force reconstruction is shown in Figure 7.

The DWGNN model flow graphic.
As mentioned above, each group of time-domain sensor feature
Two new criteria are presented to assess the DWGNN model’s generalization performance quantitatively.
The total accuracy of the identification is measured by the relative error (RE) between the identified impact forces and the original impact, which is defined as follows:

where
An essential tool in SHM for measuring the peak of impact force is the peak error (PE), which is defined as follows:

Experiment validation
An experiment is carried out in this section to demonstrate the DWGNN model’s usefulness and applicability.
Experimental set-up
A rectangular metal stiffened plate is used in the experiment, which is made of aluminum alloy material. The plate’s left side is clamped by a stainless fixture to mimic a fixed boundary condition, while the other three sides are free boundary conditions, as seen in Figure 8(a). Two I-beams that cross the whole length of the plate are welded to the back of the plate structure, as seen in Figure 8(b). As shown in Figure 8(c), excluding the fixed part, the length of the plate is 60 cm, the width is 50 cm, and the thickness is 0.3 cm. The I-beam material is the same as the plate. The specific shape parameters of the I-beam are shown in the schematic diagram in Figure 8(d).

Schematic diagram of the metal stiffened plate structure in the experiment: (a) real structure plate surface, (b) real structure stiffened beam surface, (c) schematic diagram of the plate surface, and (d) schematic diagram of the stiffened beam cross-section.
Dataset acquisition
As shown in Figure 8(a), the impact force is triggered and measured by an impact hammer, striking vertically on the metal stiffened plate structure. Six acceleration sensors are arranged on the plate structure to measure the vibration acceleration signal in the direction perpendicular to the plate surface.
The plate structure is divided into two regions A and B as shown in Figure 9(a): region A consists of 18 rectangular subregions, which are nonstiffened areas; region B consists of 12 rectangular subregions, which are stiffened areas. Acceleration sensors

Experimental dataset acquisition: (a) impact zone division and sensor placement points of plate structures, (b) training set and validation dataset acquisition points, (c) testing dataset acquisition points.
The training dataset and validation dataset are obtained by striking the center positions of regions A and B, or the positions indicated by pentagrams, a total of 30 positions, using an impact hammer, as seen in Figure 9(b). For every position, 21 impacts of varying amplitudes are performed. Every impact force has a random maximum amplitude that ranges from 20 to 200 N. As a result, the DWGNN model is trained using a training dataset of 600 samples, and it is fine-tuned using a validation dataset of 30 examples. Additionally, 78 additional testing impacts indicated by the triangles and the 30 impact positions for training are impacted again to form a testing dataset with 108 different impact positions, which includes almost the entire plate as shown in Figure 9(c). This is done in order to test the generalization performance and practicality of the proposed networks throughout the entire plate. One sample with a random force amplitude is collected for each testing impact position.
Dataset classification
This article explores the impact force identification results of the DWGNN model under various conditions, utilizing different datasets for training and testing as shown in Table 1.
Datasets and conditions in DWGNN model study.

DWGNN: dynamic weighted graph neural network.
In the absence of faults, training dataset I and testing dataset I are employed, both derived from sensor signals as documented in “Dataset acquisition” section.
When considering fault conditions, faults are introduced into the signal of a randomly selected sensor to generate additional datasets. Three distinct fault occurrence conditions are examined: a fault occurring at a random time during the entire acceleration signal period (training dataset II, testing dataset II), a fault manifesting within the first 10% of the acceleration signal time period (testing dataset III), and a fault appearing within the initial 1% of the acceleration signal time period (testing dataset IV).
Furthermore, to examine the influence of the sample size on the DWGNN model when faulty sensor signals is included in the training dataset, training dataset I is augmented by factors of 10 times (training dataset III) and 15 times (training dataset IV), respectively.
Time history reconstruction results with nonfaulty training signals
In this section, the model training of the DWGNN by training dataset I will be discussed, as well as the effectiveness and accuracy of the time history reconstruction of the experimental metal stiffened plate structure with testing dataset I. In addition, the time history reconstruction results of the testing datasets II, III, and IV are also used to verify the performance of the DWGNN model under fault conditions.
Model training by nonfaulty training dataset I
After fine tuning, the hyperparameters and specific architecture of DWGNN is listed in Table 2. Moreover, the loss of the validation dataset at each epoch is compared with the prior epoch to avoid over-fitting. A multiplication of attenuation coefficient is applied to the present learning rate if the loss hovers above 10%. The model training is carried out using a GPU (NVIDIA RTX 4090 24 GB) device.
The hyperparameters and specific architecture of DWGNN.

DWGNN: dynamic weighted graph neural network.
The history of the training loss, validation loss, and learning rate of the DWGNN model are shown in Figure 10. The training loss of DWGNN converges quickly and smoothly without significant fluctuations. The same trend is also reflected in the validation loss, and the adaptive learning rate associated with it remains at 0.0001, indicating that no overfitting occurs. Therefore, it can be considered that DWGNN has been sufficiently and well trained.

The training loss, the validation loss, and the learning rate of the DWGNN model with epoch.
Time history reconstruction results with nonfault testing dataset I
The testing dataset I was input into the trained DWGNN model to analyze its accuracy and generalization. In addition, to analyze the time history reconstruction results of different regions on the stiffened plate more intuitively and specifically, we divided the stiffened plate into three regions: free boundary, internal region, and stiffening region, and performed error statistics separately. As shown in Figure 11, the internal region is defined as the area 5 cm away from the 3 free edges, occupying 74% of the total plate area, with 85 impact positions. The remaining plate area is defined as the free boundary region, with 23 impact positions. The stiffening region is the stiffened part within the internal region, with 34 impact positions.

Three regions divided on the stiffened plate structure: free boundary (①), internal region (② and ③), and stiffening region (③).
The time history reconstruction errors are listed in Table 3 and the nephograms of the reconstruction errors at different positions on the entire plate structure is shown in Figure 12. The rectangular area inside the blue dotted line is the internal region.
The time history reconstruction errors of the testing dataset I.
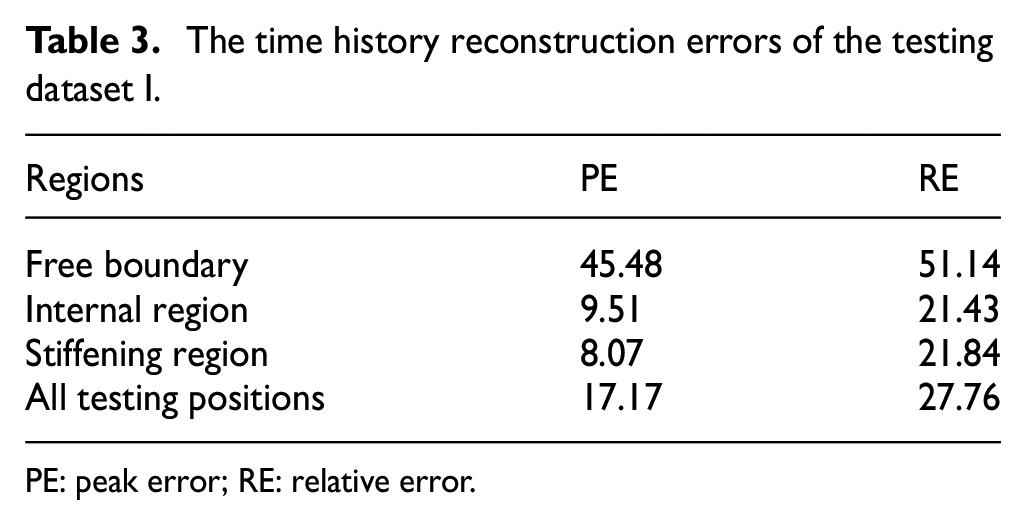
PE: peak error; RE: relative error.

The nephograms of DWGNN with testing dataset I of (a) PE and (b) RE.
It can be seen that the DWGNN model achieved a very high reconstruction accuracy in the stiffening beam region, solving the nonlinear effect caused by the stiffening beam on the time history reconstruction of the plate structure. Therefore, it can be considered that the DWGNN model achieved a high reconstruction accuracy in the entire internal region, which is satisfactory.
However, the DWGNN model exhibited high reconstruction errors in the free edge region. Figure 12 illustrates that the three free edges, and the unclamped boundary parts shown in Figure 8(c), which means that the reconstruction error is higher. On the one hand, this is because the size and complexity of the plate make the acceleration response of the free edge more complex and more susceptible to external influences when vibrating, and this part of the data was not added to the DWGNN training dataset, making the DWGNN model not fully trained for the free edge vibration; on the other hand, although the DWGNN model added the real physical distance between sensor location and impact location as a constraint, this distance is constant and does not change according to the different boundary conditions, these two reasons reduce the generalization and robustness of the DWGNN model in the free edge recognition, which is also a current drawback of the DWGNN model. Therefore, the internal region on the plate structure is considered as the effective reconstruction region of the DWGNN model. Only the reconstruction results of the internal region will be discussed in the subsequent discussions.
Finally, the time history results reconstructed by a fine-tuned DAGNN model [27] are compared, as listed in Table 3. Typical time history reconstruction results for both the DWGNN and DAGNN models are shown in Figure 13, with the reconstruction error nephograms of the DAGNN model presented in Figure 14.

The typical time history reconstruction results with the testing dataset I of: (a) DWGNN; (b) DAGNN.

The nephograms of DAGNN with testing dataset I of (a) PE and (b) RE.
Table 4 indicates that the DWGNN model’s reconstruction error is about 5% lower than that of the DAGNN model. Additionally, the nephogram color distribution for the DWGNN model (Figure 12) is more uniform than that of the DAGNN model (Figure 14) in the internal region, especially in the upper left corner where the fixed support boundary is not comprehensive. This improvement is attributed to the DWGNN model’s use of 1D-CNN to extract features from the sensor acceleration time-domain signal, unlike the direct window truncation in the DAGNN model. The 1D-CNN convolutional operator not only extracts local features but also considers the overall characteristics of the acceleration time-domain signal.
The time history reconstruction results of DWGNN model compared with DAGNN model with testing dataset I.

DWGNN: dynamic weighted graph neural network; DAGNN: Distance-assisted Graph Neural Network; PE: peak error;RE: relative error.
Time history reconstruction results with faulty testing datasets II, III, and IV
It can be inferred that the DWGNN model trained by training dataset I should be unfamiliar with various fault signals in the testing datasets II, III, and IV. As mentioned in “One-dimesional convolutional neural network feature extraction” and “Dynamic weighted graph construction” sections, the dynamic weight matrix
Furthermore, to demonstrate illustrate the effectiveness of the weight matrix

In this article, a negative skewness value for the matrix
As shown in Table 5 and Figure 15, the time history reconstruction results of the three fault situations are presented. It can be seen that when the fault occurs in the whole time period and the first 10% time period, the reconstruction error of DWGNN is close to that of the correct situation, with a 2%–3% increase. However, the skewness values of these two situations have increased significantly in absolute value compared to the completely correct situation, which verifies our previous conjecture, indicating that the weight matrix
The time history reconstruction results of DWGNN model in three fault situations with testing datasets II, III, and IV.

DWGNN: dynamic weighted graph neural network; PE: peak error;RE: relative error.

The nephograms of DWGNN model with (a) Testing dataset II, (b) testing dataset III, and (c) testing dataset IV.
In addition, since the DAGNN model cannot recognize the fault signal at all in this situation, no specific reconstruction result is listed. It can also be explained that the usual model is invalid when the sensor fails and the fault information is not added to the training dataset.
In summary, despite the absence of fault signals in the training set, the DWGNN model effectively incorporates a weight matrix. This transforms the nodes in the graph structure from mere abstract topological entities into physically meaningful information relationships based on similarity measures. This approach enables the model to assess the validity of node features, identify faulty nodes, and achieve accurate reconstruction of the time history for mixed fault signals.
Time history reconstruction results with faulty training signals
In this section, the effects of incorporating faulty signals into training dataset and data augmentation on the DWGNN model are examined. To facilitate this analysis, three additional DWGNN models and a DAGNN model are trained, serving as comparative groups.
Model training by faulty training datasets II, III,and IV
Given that all other hyperparameters of the DWGNN model remain constant, three additional DWGNN models are trained using training datasets II, III, and IV, respectively. Concurrently, a DAGNN model is trained using training dataset II. The specific training dataset parameters utilized for each model is detailed in Table 6. The training speed of the DWGNN model exhibits a significant improvement compared to the DAGNN model, achieved by substituting the direct windowing operation with a 1D-CNN. Notably, even when the total number of samples in training dataset IV is 15 times that of training dataset II, the training time for each epoch in DWGNN is marginally less than that in the DAGNN model.
The specific training dataset parameters utilized for DWGNN and DAGNN.

DWGNN: dynamic weighted graph neural network; DAGNN: Distance-assisted Graph Neural Network.
The training process of the additional four models are shown in Figure 16.

The training loss, the validation loss and the learning rate with epoch of (a) DWGNN trained by dataset II, (b) DWGNN trained by dataset III, (c) DWGNN trained by dataset IV, and (d) DAGNN trained by dataset II.
It can be seen that due to the addition of fault data in the training dataset, the complexity of the problem increases significantly, and the training dataset and validation dataset losses of all four models fluctuate, among which the fluctuation of the DAGNN model is more obvious. With the adaptive adjustment of the learning rate, all four models converge and do not overfit, and it can be considered that all four models are fully trained.
Time history reconstruction results faulty testing dataset IV
Testing dataset IV was utilized to reconstruct the time history of DWGNN. The final reconstruction error is listed in Table 7, and the nephograms is depicted in Figure 17.
The time history reconstruction results of DWGNN and DAGNN.

DAGNN: Distance-assisted Graph Neural Network; DWGNN: dynamic weighted graph neural network; PE: peak error; RE: relative error.

The nephograms with testing dataset IV of (a) DWGNN trained by dataset II, (b) DWGNN trained by dataset III, (c) DWGNN trained by dataset IV, and (d) DAGNN trained by dataset II.
As evidenced by Table 7, the addition of fault signals to the training dataset enables DAGNN to reconstruct the time history of fault signals under challenging conditions. However, its reconstruction accuracy remains significantly inferior to the DWGNN trained by dataset I. This is further corroborated by the nephograms in Figure 17(d), which shows that the reconstruction errors of DAGNN exceed those of other models.
A comparison of the reconstruction results of DWGNN trained by datasets II and I reveals that the addition of fault signal to the training dataset has a noticeable and positive effect. Even without an increase in the number of samples, the reconstruction accuracy improves by approximately 10%.
A further comparison of the reconstruction results of DWGNN trained by dataset III and DWGNN II demonstrates that increasing the sample size of the faulty training dataset significantly improves the time history reconstruction accuracy of the DWGNN model under challenging conditions, with reconstruction accuracy improving by approximately 40%. When the training sample size increased by nine times, the recognition accuracy reached a very high level. However, this improvement comes at the cost of the training time, which increased by about nine times.
Finally, a comparison of the reconstruction results of DWGNN trained by dataset IV and DWGNN III indicates that increasing the data samples further has minimal effort. When the training time is extended by half, the accuracy of time history reconstruction no longer improves.
Conclusion
This article introduces a DWGNN for precise reconstruction of impact force time histories under both fault and nonfault conditions in sensor networks.
The DWGNN model is driven by graph and uses the acceleration time-domain features extracted by 1D-CNN as node features, and the information validity based on similarity is used as node weight to realize the weighted graph structure that dynamically changes with each group of sensors according to the fault situation. The effectiveness and robustness of the DWGNN model are verified by experiments on a stiffened metal plate. The DWGNN model only relies only nonfaulty training data constructed by sensor signals and experimental collection force signals. The reconstruction results of the correct testing dataset show that the DWGNN model maintains a high accuracy at different positions in the internal region of the stiffened plate structure, but not very good at the free boundary. The reconstruction results under fault signals indicate that the DWGNN model can ensure high reconstruction accuracy under various fault conditions with the effective adjustment of the weight matrix. Furthermore, the inclusion of faulty sensor signal in the training dataset, achieved through the method of data augmentation, can notably enhance the reconstruction accuracy of the DWGNN model under challenging fault conditions.
These conclusions indicate that the DWGNN model can perform impact force time history reconstruction on complex structures and maintain high accuracy and robustness in fault situations. It has excellent application potential in the fields of real-time structural health monitoring and fault diagnosis in complex engineering structures.
In our future work, we aim to further optimize and analyze the architecture and applicability of DWGNN. This includes (i) enhancing DWGNNs identification accuracy for scenarios involving free boundaries, (ii) investigating DWGNNs capability to handle multiple sensor faults, and (iii) validating the model’s effectiveness and accuracy on real aircraft structures, focusing on the precise construction of transfer functions and fault diagnosis capabilities in practical applications.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by National Key Research and Development Program of China (Grant No. 2021YFB3400100), National Natural Science Foundation of China (Grant Nos.52235003 & U2436204), the Fundamental Research Funds for the Central Universities (Grant Nos. NE2024002 & NP2024112), Funding for Outstanding Doctoral Dissertation in NUAA (Grant No. BCXJ24-02)..