
Abstract
Ensuring the safety and reliability of key components, such as bearings, is crucial in machinery systems. Therefore, academia and industry have long tried to develop prognostic and health management technology. In particular, it is necessary to carry out methods to predict the remaining useful life (RUL) of the bearing, which can reduce economic losses and significantly prevent safety accidents. To overcome the deficiency of current investigations on bearing RUL prediction, a new method based on acoustic emission signals and a physics-informed neural network (PINN) is proposed in this paper. A new health index is constructed by developing an improved diffusion entropy, which outperforms current time-domain features. Four different labeling functions are compared to demonstrate that the exponential function has the best capacity to represent the bearing degradation process. The physical knowledge in this paper is derived from reliability engineering, that is, the failure procedure described via the Weibull distribution, and this knowledge is incorporated into a long short-term memory neural network to construct the PINN model by developing a Weibull-loss function. Moreover, this knowledge integration can improve prediction performance and help circumvent some obstacles, including poor quality or limited historical data and the obscurity of the underlying processes. Finally, the effectiveness and superiority of the proposed method are validated through experimental results and comparison with other existing methods.
Keywords
Introduction
Prognostic and health management (PHM), 1 which aims to optimize and timely maintenance of machinery and equipment, has attracted more and more attention in both academia and industry. The reason is that multiple machinery and equipment, such as helicopters, wind turbines, induction motors, aero engines, and high-speed trains, are becoming increasingly complex with the rapid development of technology and suffer harsh working environments chronically, thus leading to sudden failure and accompanying maintenance costs and downtime losses. Compared to traditional maintenance strategies that depend on operators to observe and identify the health status of machinery and equipment, PHM can greatly reduce manual labor and improve maintenance efficiency by incorporating four procedures, that is, monitoring, diagnosis, prognosis, and health management, as depicted in Figure 1. Monitoring refers to the health condition surveillance of machinery and equipment, which depends on multiple sensors (e.g., vibration sensors or temperature sensors) to trace the corresponding health state through data processing.2,3 Diagnosis means the identification, location, and detection of the type, position, and degree of the faults, respectively, and advanced signal processing techniques (e.g., feature extraction and selection) and emerging artificial intelligence (AI) approaches (particularly machine learning and deep learning) have facilitated these decisions.4,5 The prognosis aims to estimate the progress of degradation and further predicts the remaining useful life (RUL) of mechanical equipment, which can be defined as “the length from the current time to the end of useful life.” 6 Health management integrates the former three procedures into an optimal maintenance strategy that can balance maintainability and economic cost. In addition, prediction of RUL7,8 is one of the most important tasks in PHM, as it is the ultimate goal of prognostics that can guide maintenance plans. 9 In recent decades, more and more attention10–18 has been paid to the study of RUL prediction of machinery, going to great lengths to solve two questions:
(i) How can we achieve the RUL prediction through the monitoring data of machinery?
(ii) How to estimate the RUL prediction performance?
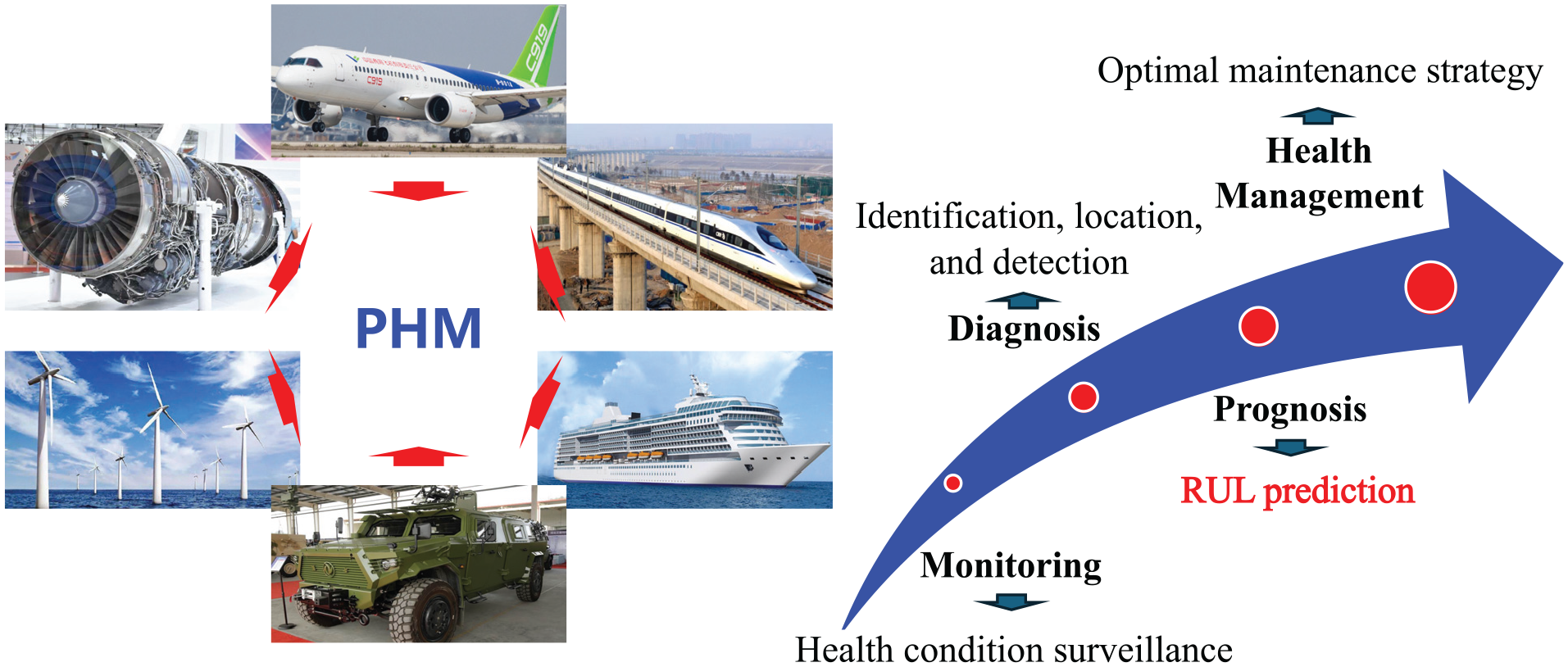
A typical PHM strategy for machinery and equipment.
In multiple modern rotating machinery and equipment, rolling bearings, as the most critical mechanical components, are widely used to facilitate linear motion or rotary motion by reducing friction between moving parts. However, they are vulnerable due to several issues, including extensive load, high speed, and poor lubrication. Particularly, bearings may suffer overheating and increased clearance over time under such harsh conditions and finally be prone to collapse. For instance, about 80% of the gearbox problems can be attributed to bearings in the wind energy industry,
19
and several accidents of aircraft caused by bearing failure have been reported.
20
Therefore, it is essential to conduct investigations on bearing RUL prediction, which can effectively improve the reliability of rotating machinery and reduce maintenance and downtime costs correspondingly. A typical bearing RUL prediction procedure is illustrated in Figure 2, and it employs a mathematical model to fit existing data at
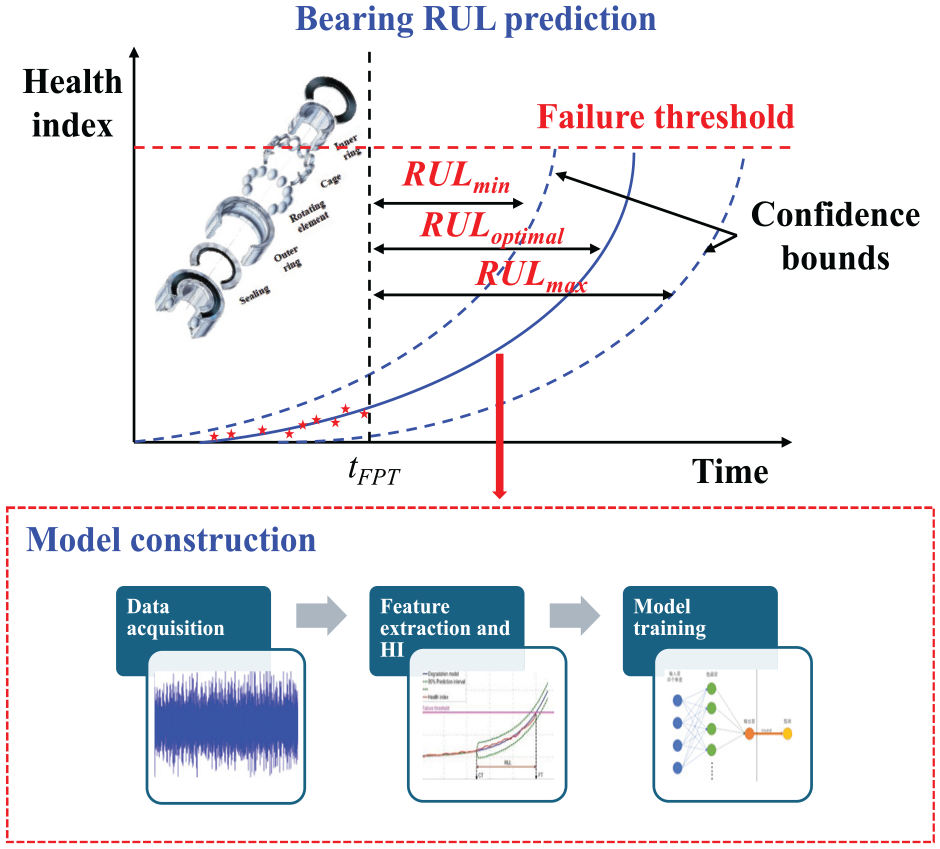
A typical bearing RUL prediction procedure.
Though the above-mentioned investigations have proved that the data-driven models, particularly based on vibration signals, can be used to predict bearing RUL, some limitations should be noticed, including difficulty in detecting impending failure before damage occurs and vulnerability of operating speed. Therefore, several works34–36 have ascertained the feasibility of acoustic emission (AE) to implement PHM of bearings, since AE is capable of detecting incipient failures by tracking stress waves that originate from released strain energy in a material when deformation or fracture occurs. Particularly, the root mean square (RMS) and Kurtosis extracted from raw AE signals show a good correlation to the degradation process of bearings. Similar to bearing RUL prediction via vibration signals, AE-based bearing RUL prediction depends on feature extractions to characterize the degradation process (i.e., HI construction) and develops physics-driven or data-driven models to implement RUL prediction. Elforjani 37 employed AE signals to predict bearing RUL by proposing a new HI called signal intensity estimator (SIE) and training an artificial neural network (ANN) to correlate SIE with corresponding bearing degradation. Furthermore, in terms of bearing RUL prediction via AE signals, Elforjani and Shanbr 38 compared the performance of multiple HIs and data-driven models, including ANN, support vector machine regression (SVMR), and Gaussian process regression (GPR), and they noted that proper model structure and sufficient data were incredibly essential. Aye and Heyns 39 proposed an optimal GPR model based on a novel HI, which was derived from the integration or combination of existing simple mean and covariance functions of AE signals, to forecast bearing RUL. Moreover, DL-based models have been utilized in bearing RUL prediction via AE signals, for instance, Motahari-Nezhad and Jafari40,41 extracted multiple time-domain and frequency-domain features to construct HI (considered prognosability, monotonicity, and trendability) and trained different multilayer perceptron (MLP) models and LSTM models for the bearing RUL prediction.
According to the above introduction, we can see that DL-based data-driven models have been implemented and applied to bearing RUL prediction via AE signals. However, little investigation contributes to developing DL models incorporated with physical knowledge (i.e., feeding physical knowledge of bearing degradation into the DL model training process to improve interpretability and generalization for different application scenarios 42 ) for bearing RUL prediction, particularly via AE signals. Here, the interpretability, to some extent, means the explanation of model prediction results and the working mechanisms behind, helping us to understand how the model makes the prediction. In other words, it is essential to build connections between the mapping relationship of the model and our prior knowledge, further enhancing the degree of comprehension of predictions. Therefore, incorporating physics-based knowledge into the model (e.g., via the loss function) can restrain and supervise the training process of the model, making the prediction more consistent with prior knowledge, that is, higher interpretability of predictions. A physics-informed DL model aims to extract better features that can characterize bearing degradation information than purely data-driven models by leveraging domain knowledge to alleviate the prediction error that is contrary to real-world physics.43,44 Using an HI constructed via vibration signals and knowledge of monotonic degradation described by temperature signals, Chen et al. 45 developed a physics-informed neural network (PINN) named degradation consistency recurrent neural network to overcome the drawbacks of purely data-driven methods and improve bearing RUL prediction performance. Yang et al. 46 proposed a physics-informed bearing RUL prediction approach that employed a dynamic adaptive inverse discrete Fourier transform (IDFT) frequency-domain block to incorporate physical knowledge, and a residual self-attention multistate gated control unit (RSA-MSGCU) was used to make bearing RUL prediction. According to the literature review, to the best of our knowledge, no complete investigation has been conducted on bearing RUL prediction via AE signals and PINN until now. Therefore, in this paper, we study the feasibility of AE signals and PINN to forecast bearing RUL for the first time, and the main contributions are summarized as follows.
(i) A novel PINN model is developed to forecast bearing RUL, and its performance is better than current DL-based models since the physical knowledge of bearing degradation is leveraged via a customized data-physics-driven loss function. In addition, the developed PINN provides a higher level of compliance with physics, which enhances the interpretability and generalization capacity.
(ii) A new HI called improved diffusion entropy (IDEn), which can estimate signal complexity, is proposed to process AE signals and characterize the bearing degradation process in this paper. Compared to current HIs constructed via time-domain and frequency-domain features (RMS, Kurtosis, etc.), the proposed IDEn is more promising, reliable, robust, and sensitive to bearing degradation.
(iii) The effectiveness of the proposed method is verified via a set of laboratory tests on run-to-failure bearings. The priority of the proposed method is confirmed by comparison with other existing methods.
The rest of this paper is organized as follows: the details of the proposed method are given in “Methodology,” including a brief introduction of the AE signal and a presentation of the proposed IDE and PINN; the experimental setup, including the test rig and measurement procedure, and results are illustrated and discussed in the third and fourth sections, respectively; and the fifth section concludes the entire article and provides future research directions.
Methodology
In this paper, a novel bearing RUL prediction method is proposed, and its flowchart is depicted in Figure 3. First, AE signals from the ball bearing under run-to-failure tests are acquired. Then, we employ a new entropy indicator, that is, IDEn to implement feature extraction and HI construction from AE signals. Finally, a PINN model that incorporates LSTM and physical knowledge based on Weibull distribution is developed and trained via IDE-enabled HI to forecast bearing RUL with promising performance.
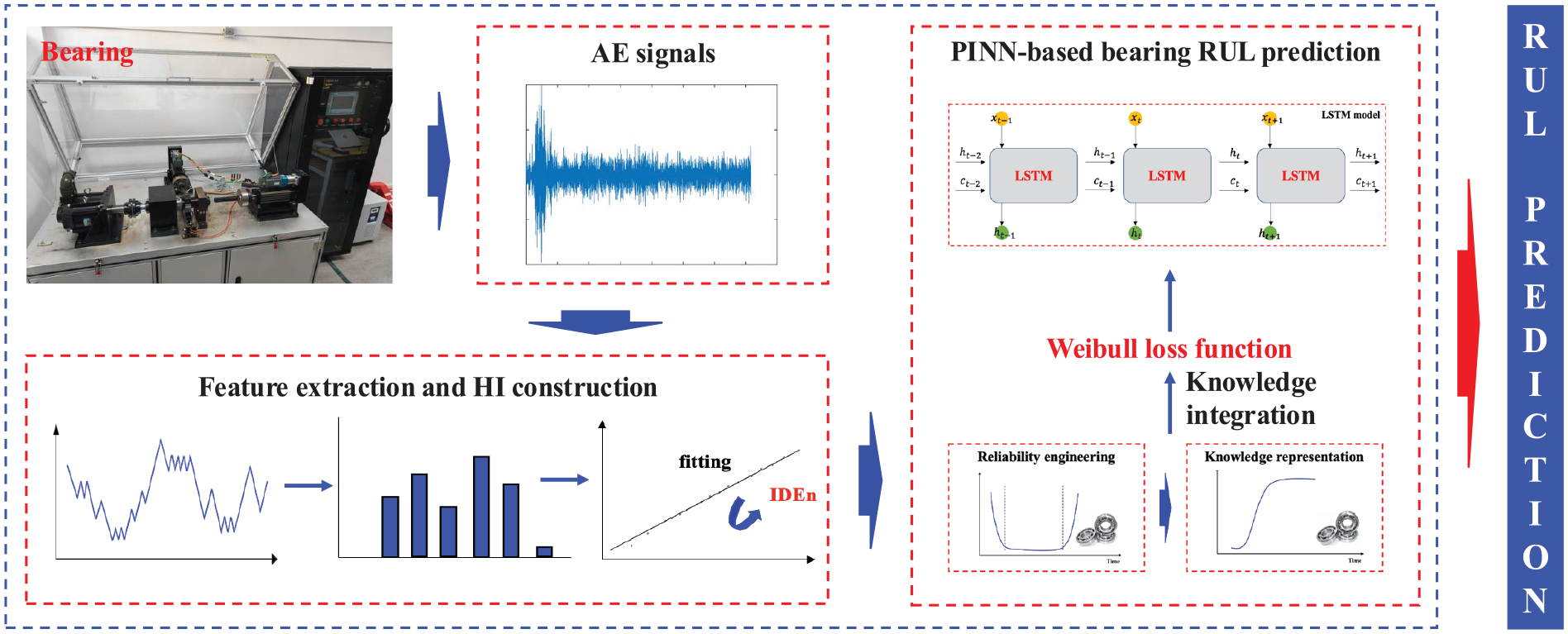
Flowchart of the proposed method.
Acoustic emission
AE refers to the generation of transient elastic waves, which are caused by the release of energy (i.e., a rapid redistribution of stress) in a material when external stimuli such as changes in pressure, load, and temperature are applied. Multiple events from earthquakes and rock bursts down to initiation and growth of cracks can be sources of AE signals, and detection or analysis of AE signals can provide valuable information (e.g., origin and process) of discontinuity in the material, which is an attractive versatility for PHM in modern industry.47,48 Generally, there are two kinds of AE signals (burst and continuous signals), and the AE signals caused by bearing degradation belong to the burst signal (the so-called “hit”). A typical AE burst signal is illustrated in Figure 4, and we can see that several parameters are employed to characterize AE signals.

where

where

where
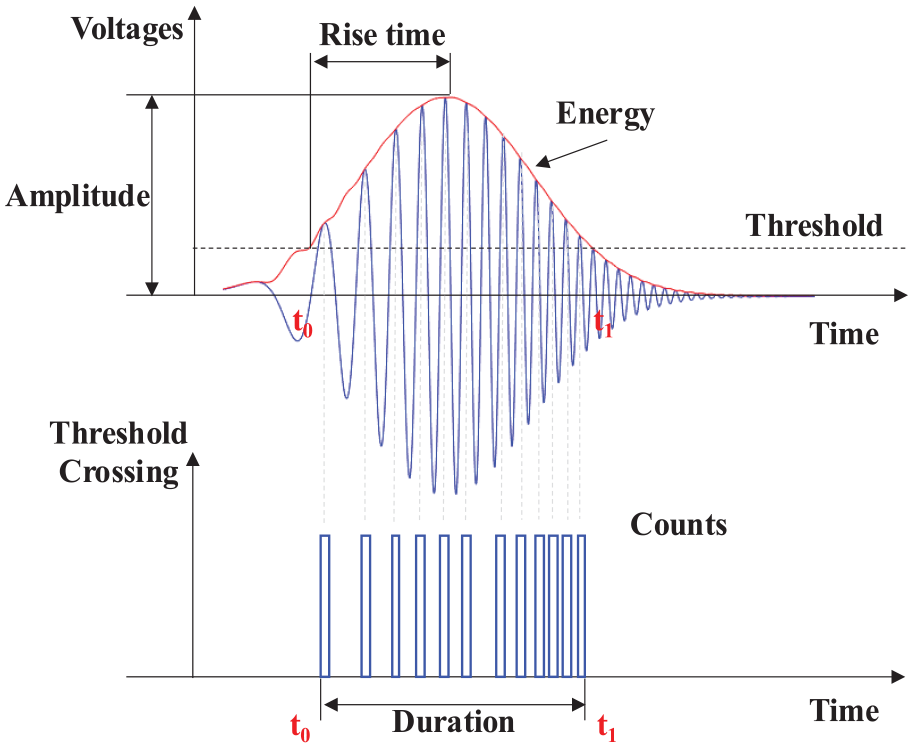
A typical AE signal and corresponding parameters.
Entropy
Entropy that works as a statistical measure metric can be used to estimate the complexity of information of data series, and several entropy metrics have been widely used in PHM, including Shannon entropy and Gnome entropy 49 . Entropy refers to the uncertainty of a data series; specifically, its value increases with more complex data series. In this paper, a new entropy indicator named IDEn is proposed by upgrading the current diffusion entropy analysis (DEA) 50 via Deng entropy, 51 and its detailed procedure depicted in Figure 5 is given as follows.
(i) In terms of a time series


(ii) The time series

(iii) Events can be recorded when the time series crosses or intersects a stripe at time T, which can be determined via two conditions:


It is worth noting that a crossing or intersection must happen at time T when either of these two conditions is false. Subsequently, 1 (a crossing happens at time T) or 0 (on the contrary) can be appended to the event array
(iv) Based on the event array, a diffusion trajectory

where
(v) A set of moving windows is employed to characterize the diffusion trajectory, that is, each moving window with a defined length l steps along the diffusion trajectory to generate many slices. Each slice has a distance from the origin along the y-axis, and these displacements are binned in a histogram, which can be used to develop a probability distribution
(vi) For the moving window with length l, we can calculate the Deng entropy

where
(vii) After calculating corresponding Deng entropy values under different lengths of moving windows, we can obtain a principal relation curve, that is, Deng entropy versus natural log of moving window lengths, as:

where
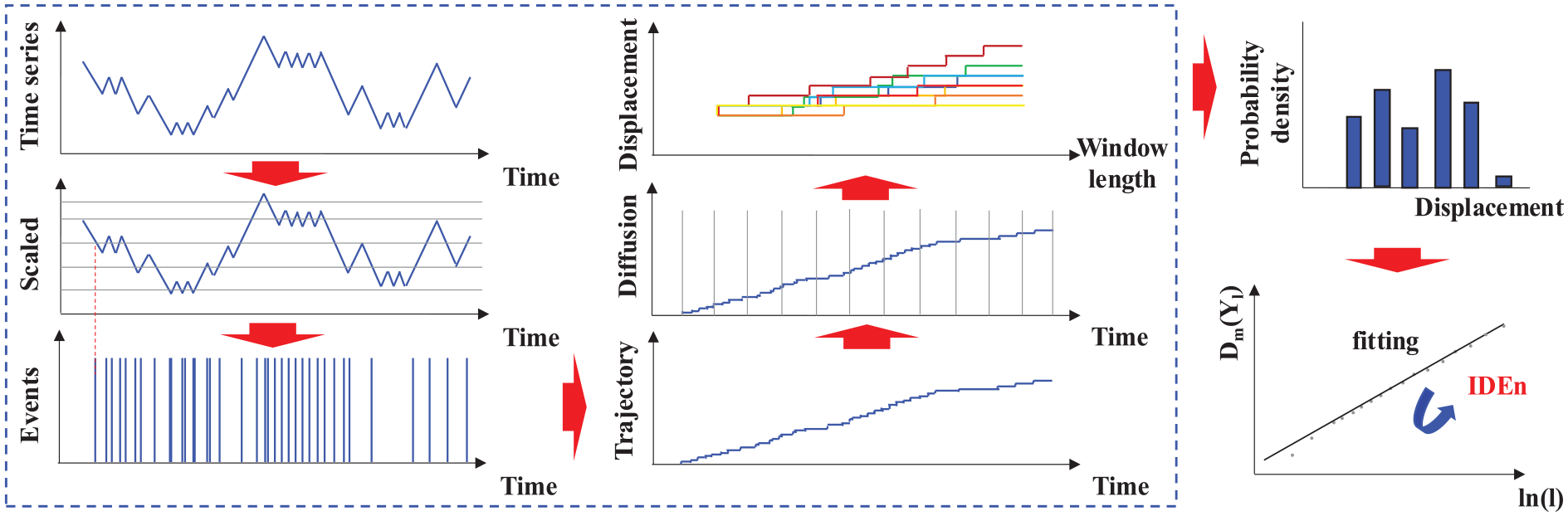
Flowchart of the proposed IDEn.
Finally, IDEn of AE signals from the ball bearing under run-to-failure tests is employed to construct HI for further RUL forecasting via the PINN, which will be introduced in detail in the next subsection.
Physics-informed neural network
According to the earlier introduction, it is well known that AI-enabled data-driven models, including ML and DL-based methods, have attracted a lot of attention in the field of bearing RUL prediction. However, it is worth noting that a sufficient amount of training data is required for these ML and DL-based methods, which is challenging and time-consuming in real-world industrial applications. In addition, the black-box nature of these methods cannot provide a satisfactory understanding of the underlying processes and even struggles to adhere to physics constraints. Thus, a rising investigation area aiming to enhance current data-driven models is developed via the integration of explicit prior knowledge in recent years, that is, PINN. In this paper, as depicted in Figure 6, the external knowledge is derived from reliability engineering, which employs the probabilistic relationship of the Weibull distribution (in particular, the Weibull cumulative distribution function (CDF)) to describe the failure procedure of the machinery (i.e., “bathtub” curve of a bearing), and it is integrated into an LSTM network through a Weibull-based loss function. According to reliability engineering, a bearing always fails following a “bathtub” curve illustrated in Figure 7:
(i) a higher probability of failure during the initial period (i.e., run-in stage), which can be attributed to manufacturing defects and installation errors.
(ii) a relatively low and constant probability of failure during the design life.
(iii) an obvious increasing probability of failure during the stage of wearout. Subsequently, the Weibull distribution can be implemented to characterize the above bearing’s failing probability, since it is intuitive and capable of modeling multiple failure types. Particularly, the Weibull CDF

where

where
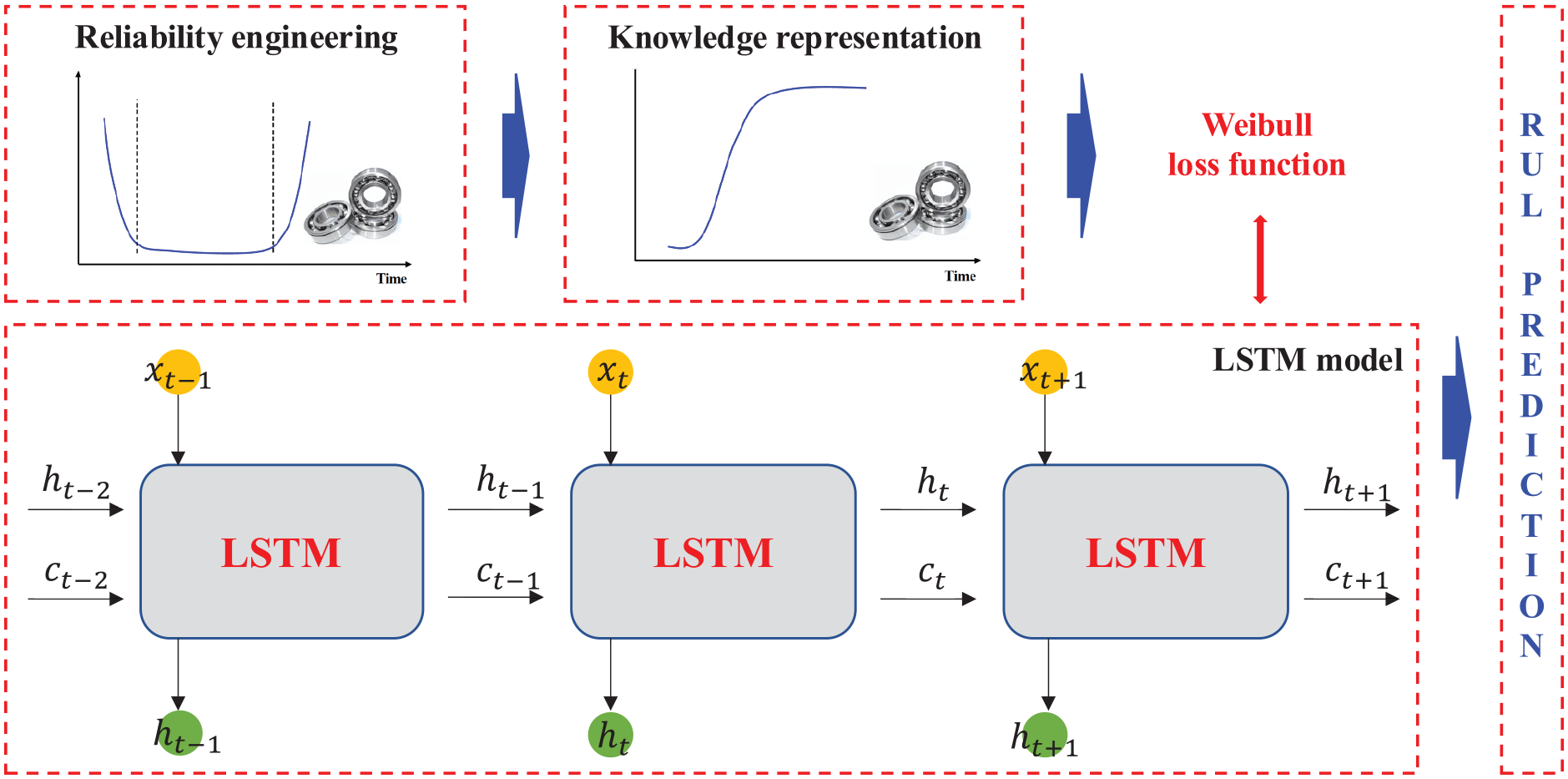
Flowchart of the proposed PINN.
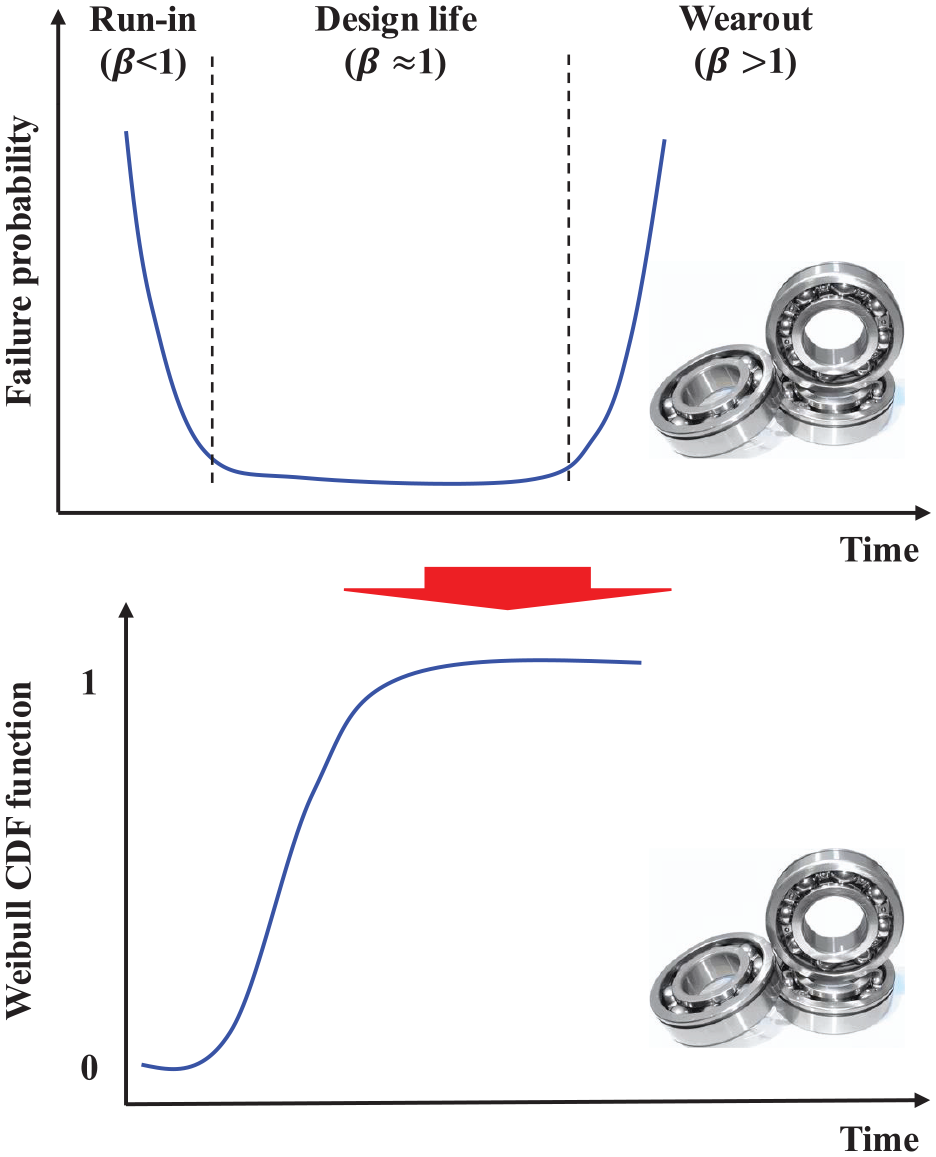
The “bathtub” curve of a bearing and corresponding Weibull CDF function.
After determining





where
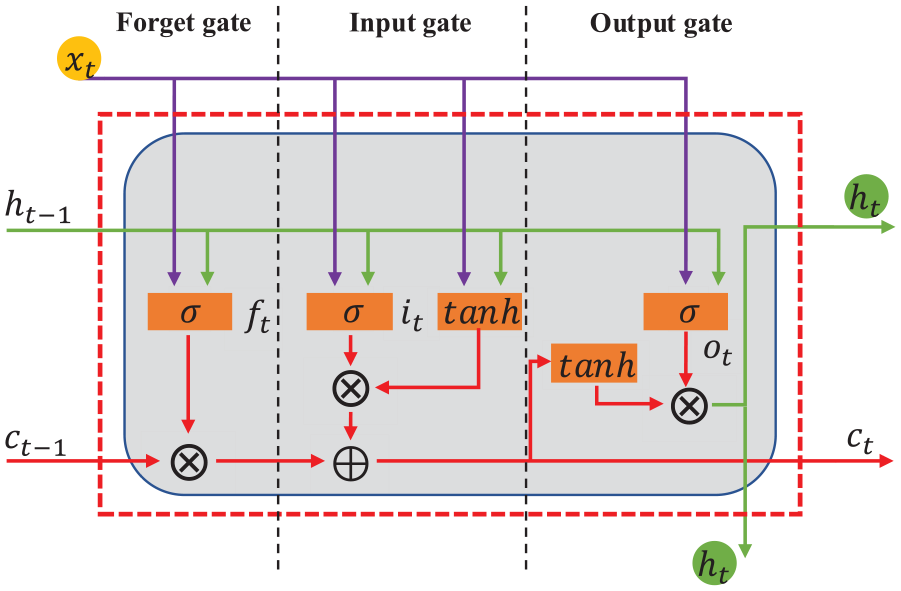
A typical LSTM cell architecture.
The architecture of LSTM model.
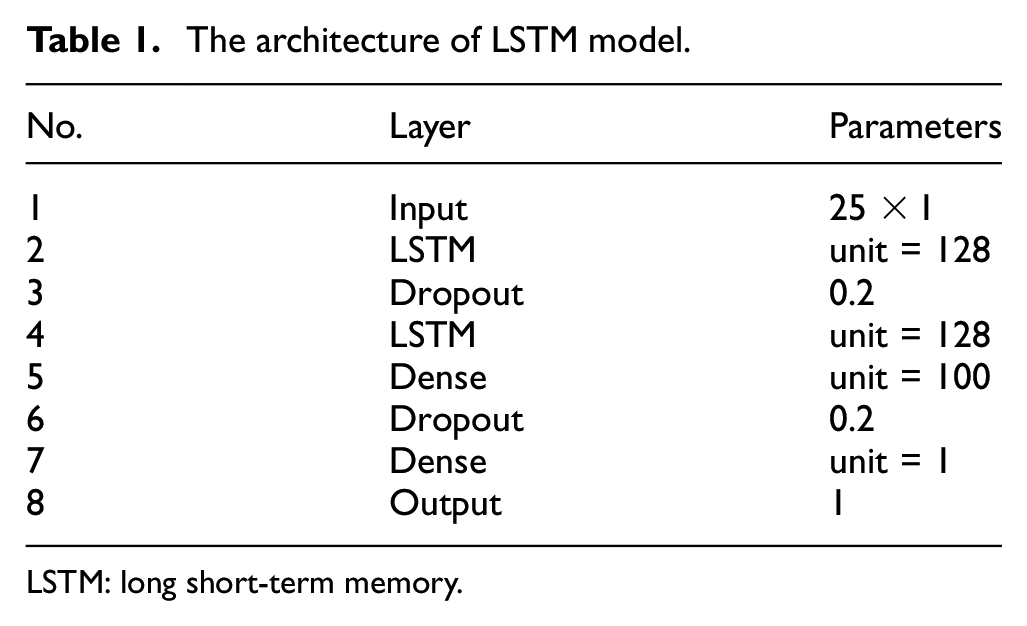
LSTM: long short-term memory.
The training of the LSTM network is achieved via the minimization of a loss function, that is, the back-propagation process, and the Weibull-based loss function
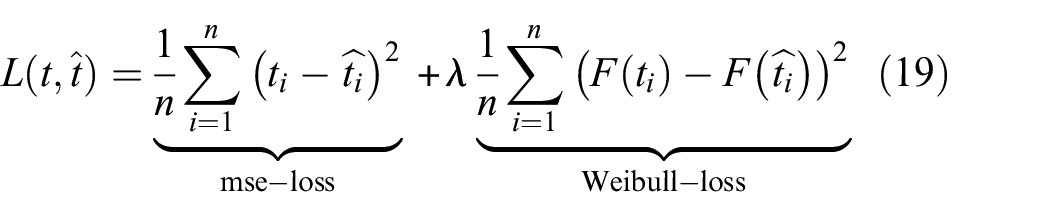
where n is the number of samples in the data set;
Finally, the PINN model (i.e., LSTM model enhanced by the Weibull-based loss function) proposed in this paper can be trained via extracted IDEn-enabled HI and employed to forecast bearing RUL, which should outperform counterparts with traditional loss functions. Generally, several issues, including poor quality (e.g., mess with noise, or lower informational quality) and insufficient data, can affect the stability and convergence of the loss function in a DL model. The Weibull-loss function can apply a corrective force on the prediction model during the training process (because features extracted from poor-quality data that do not conform to the Weibull distribution will be dropped) to alleviate negative effects from poor-quality data. Moreover, this custom loss function’s interpretability can provide a possibility to counteract the nongeneralizable performance of the model that only depends on insufficient historical data.
Experimental setup
Test rig
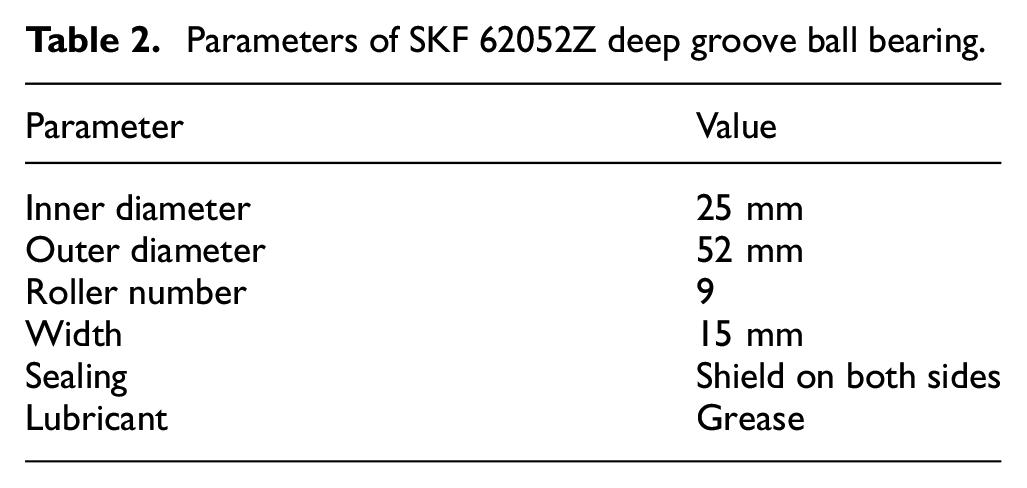
In this paper, as depicted in Figure 9, a self-developed test rig is built to implement the run-to-failure testing on bearings, that is, no defects are initiated on the bearing to ensure the degraded bearing whose operating conditions are close to real cases. An asynchronous motor within the speed range (between 0 and 3000 rpm) is employed to drive the whole test rig. A compliant and rigid shaft coupling is utilized to connect the asynchronous motor and the testing part, which consists of two accompaniment pillow blocks with bearings (the left accompaniment pillow block has a pair of tapered rolling bearings, right accompaniment pillow block has a ball bearing) and the tested bearing (type 62052Z deep groove ball bearing, SKF, Sweden, and more detailed parameters are given in Table 2). The axial and radial forces (ranges are between 0 and 15,000 N) are applied to the tested bearing by two Electrical Hydrostatic Actuators (EHA) with force transducers, respectively, which can reduce the tested bearing’s life duration in the case of overload (i.e., more than the bearing’s maximum dynamic load). The rotating speed of the asynchronous motor and the loading force of the EHA are controlled by an electric control cabinet that equips corresponding programmable logic controllers (PLC). Via the developed test rig, we can obtain real experimental data (e.g., AE signals in this paper) to characterize the whole degradation procedure of ball bearings, and the detail is discussed in the next subsection.
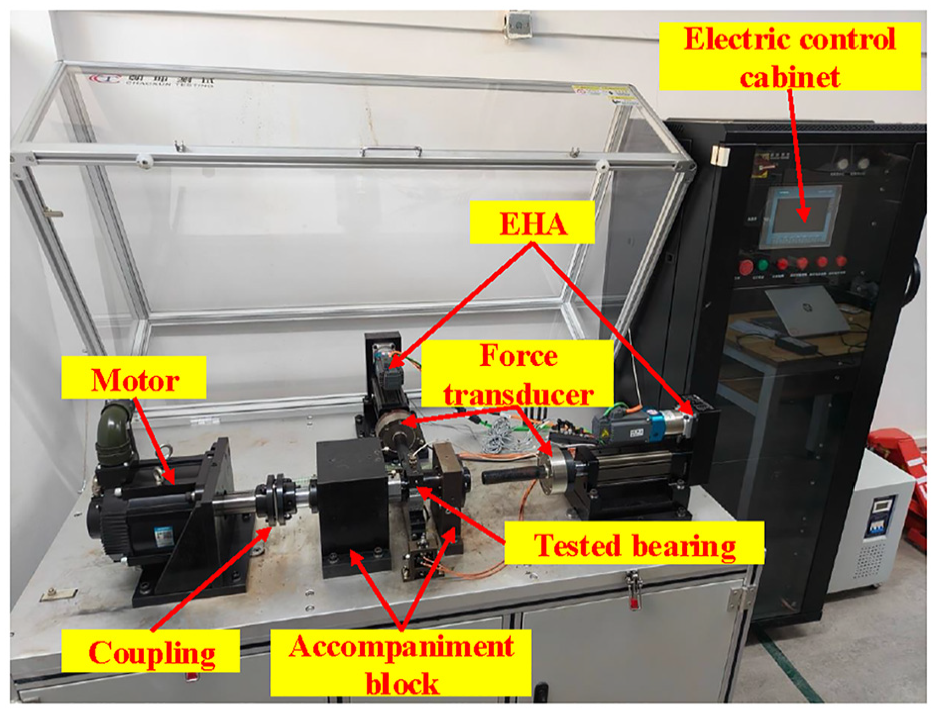
Photo of the test rig.
Parameters of SKF 62052Z deep groove ball bearing.
Measurement procedure
On the one hand, the temperature monitoring is implemented via an resistance temperature detector (RTD) platinum PT100 probe, which is placed inside the pillow block and close to the bearing’s external ring. On the other hand, the AE measurement on the test rig was conducted via a USB AE node (type 1283, MISTRAS, Princeton, NJ, USA) as well as a NANO-30 AE sensor, and the bandwidth of the AE node and the AE sensor is 1 kHz–1 MHz and 125 kHz–750 kHz, respectively. The installation location of the AE sensor on the test rig was illustrated in Figure 10, and the coupling between the sensor head and bearing housing was accomplished via a couplant (type high vacuum grease, Molykote, Midland, MI, USA). Moreover, according to the DIN EN 13477-2:2010, the Hsu-Nielson approach was utilized to confirm this coupling, that is, the AE responses caused by pencil-lead breaks on the bearing housing were observed. During the whole testing, a 40 dB threshold value was set to reduce the effect of noise, that is, signals with low power were neglected. Moreover, a 1000 Hz high-pass filter is employed to ensure that AE signals can be devoid of noise and interference from external sources. The AE acquisition was triggered when signals exceeded the preset threshold value, and it was pre-amplified and sampled with a rate of 1 MHz and a resolution of 18 bits. Moreover, the PDT, HDT, and HLT were set to 1, 2, and 20 ms, respectively. After triggering, an illustration of one hit is given in Figure 11. The above operation can ensure a high sample rate of AE signals with a feasible acquisition rate for the measuring system. In this paper, four run-to-failure tests under a certain working condition (rotating speed: 2000 rpm, radial force: 12,000 N) are conducted, and more details are discussed in the next section.
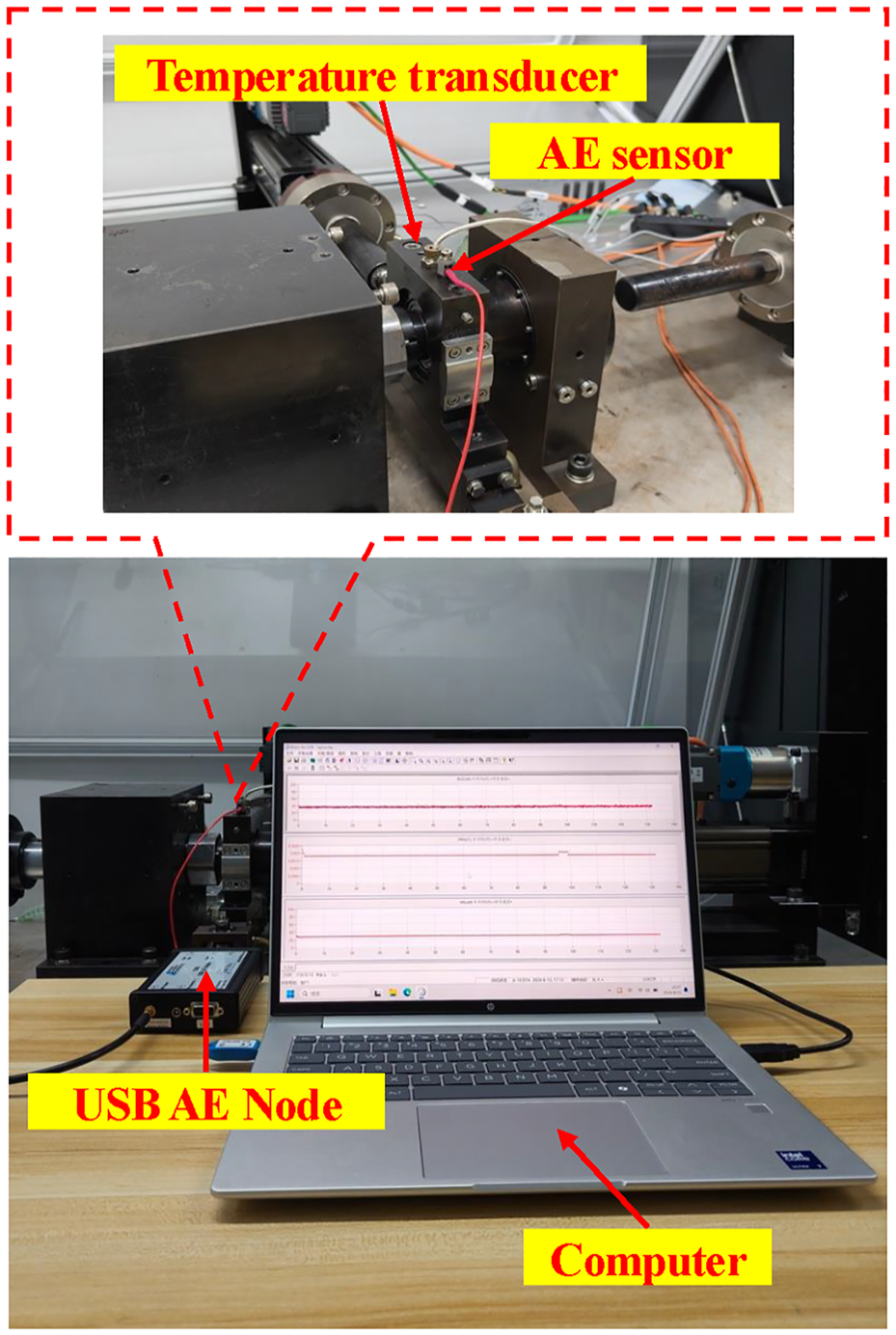
Setup of AE measurement.
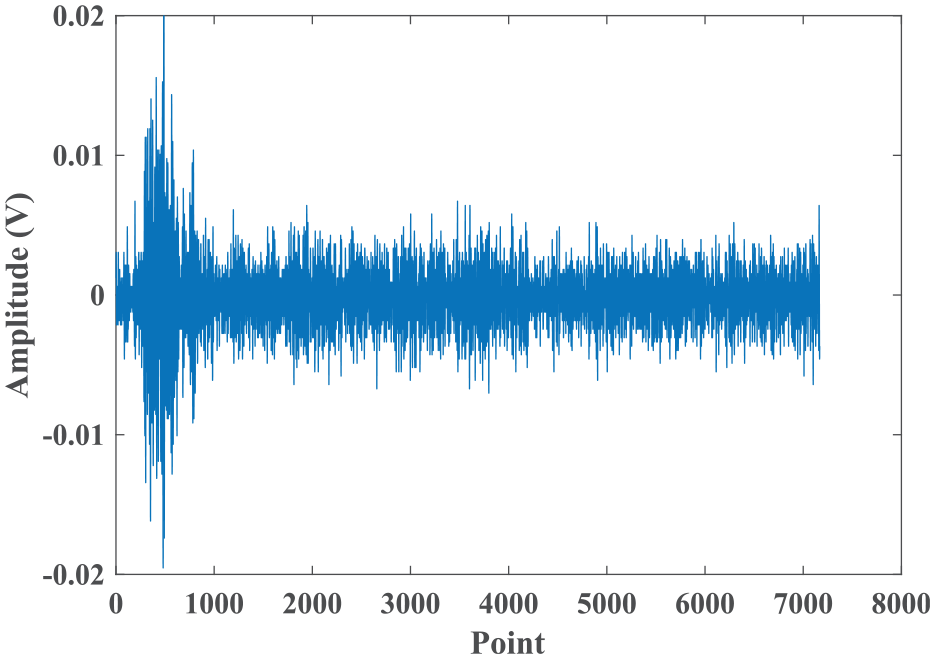
Illustration of one hit (AE signal).
Results and discussion
Experimental results
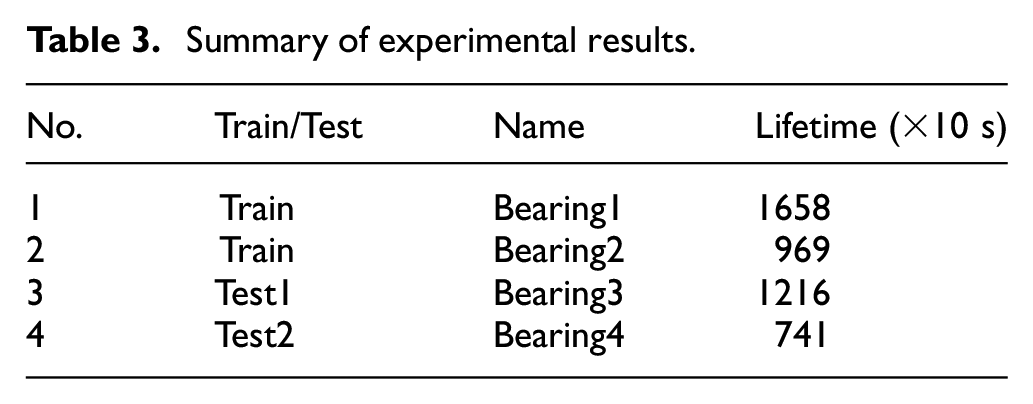
Four run-to-failure tests (working conditions: the rotating speed is 2000 rpm, and the radial force is 12,000 N) are conducted on the proposed test rig, and the temperature monitoring is used to determine the time when the test is terminated (i.e., a bearing failure occurs when the temperature value exceeds a certain value, which is in this paper). In terms of AE measurement, the signal collection is implemented every 10 s, and each recorded AE signal has 7168 data points, as shown in Figure 11. Then, using the proposed IDEn, the lifetime procedures of four testing bearings are depicted in Figure 12, and the detailed lifetime information is summarized in Table 3. It can be seen that the degradation process is different for distinct bearings (e.g., different lifetimes), while all testing bearings represent a slowly monotonic tendency, which is an ideal case.
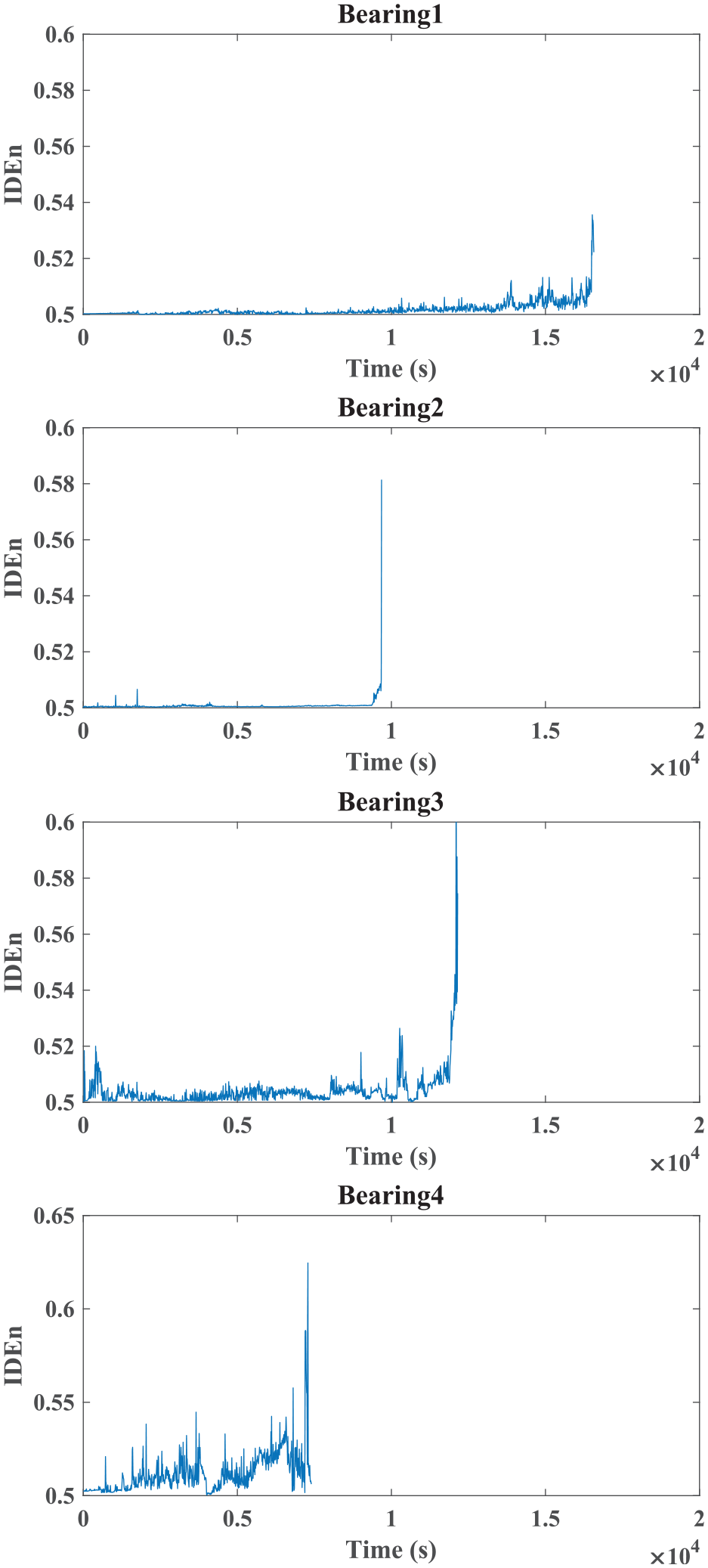
IDEn computed on AE signals of four testing bearings.
Summary of experimental results.
Evaluation of features and HI construction
As discussed earlier, the extraction of features and HI construction are essential procedures for bearing RUL prediction. Therefore, in this subsection, three evaluation indices, including monotonicity indicator (
where
Due to noises under varying working conditions and stochasticity of the degradation processes, the HI may show random fluctuations, which reduce the prediction stability. Therefore, a promising HI should be robust to interferences and present a smooth degradation process.

where
Besides the monotonicity and robustness, we always expect the HI’s trend to correlate with the bearing’s lifetime, that is, trendability, which changes between −1 and 1. Specifically,
In this paper, to verify the efficacy of the proposed HI in this paper, we implement a comparison between the proposed HI and several typical time-domain features, including RMS, skewness (Skw), kurtosis (Kur), crest factor (Cf), and several typical entropy, including approximate entropy (ApEn), sample entropy (SpEn), and permutation entropy (PeEn). The comparison results are summarized in Table 4, and we can see that the proposed IDEn almost has the best performance, which demonstrates the efficacy of the proposed IDEn for HI construction.
Summary of comparison results between the proposed IDEn and other typical time-domain features.
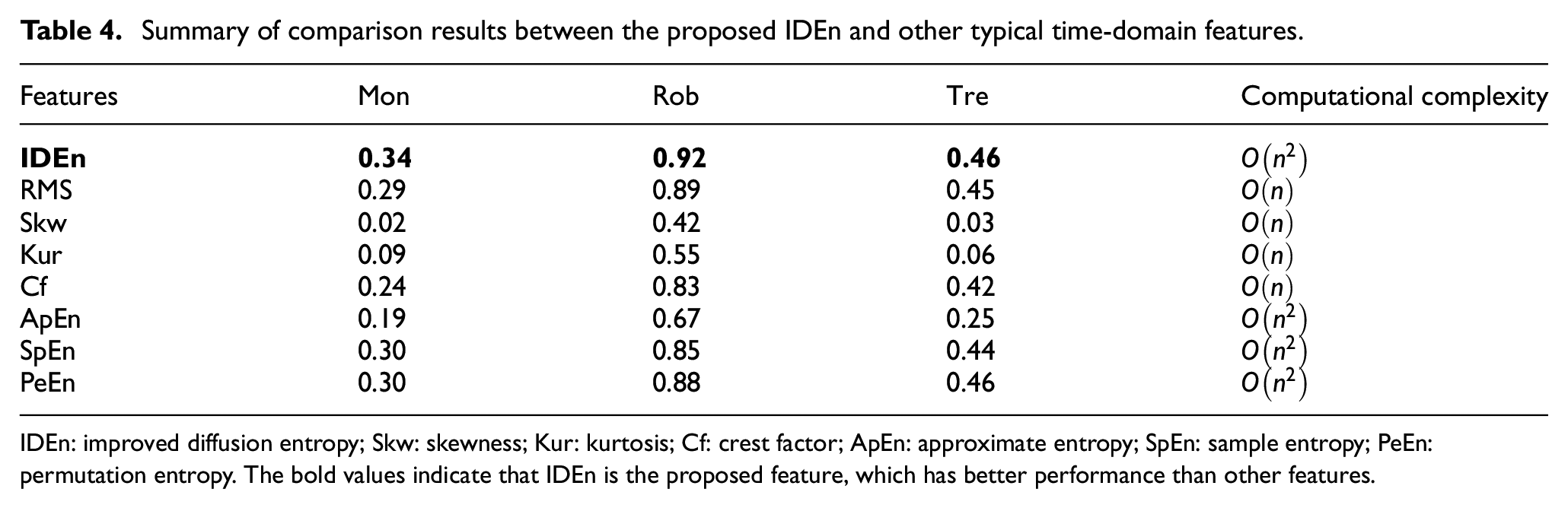
IDEn: improved diffusion entropy; Skw: skewness; Kur: kurtosis; Cf: crest factor; ApEn: approximate entropy; SpEn: sample entropy; PeEn: permutation entropy. The bold values indicate that IDEn is the proposed feature, which has better performance than other features.
Finally, we construct the HI based on the proposed IDEn, which can be expressed as:

The above equation can construct the HI via the proposed IDEn in a decreasing trend, which will represent better consistency of the labeling function discussed in the next subsection.
RUL prediction performance
After constructing HI, we train the PINN model via the training dataset (Bearing1 and Bearing2) to forecast bearing RUL, and the prediction performance is verified through two testing datasets (i.e., Bearing3 and Bearing4). First, the sliding time window method is used to construct the sample data of the training and testing dataset, which should satisfy the input requirements of the PINN (specifically, LSTM) model. In terms of the input array for the LSTM model, the dimension size is



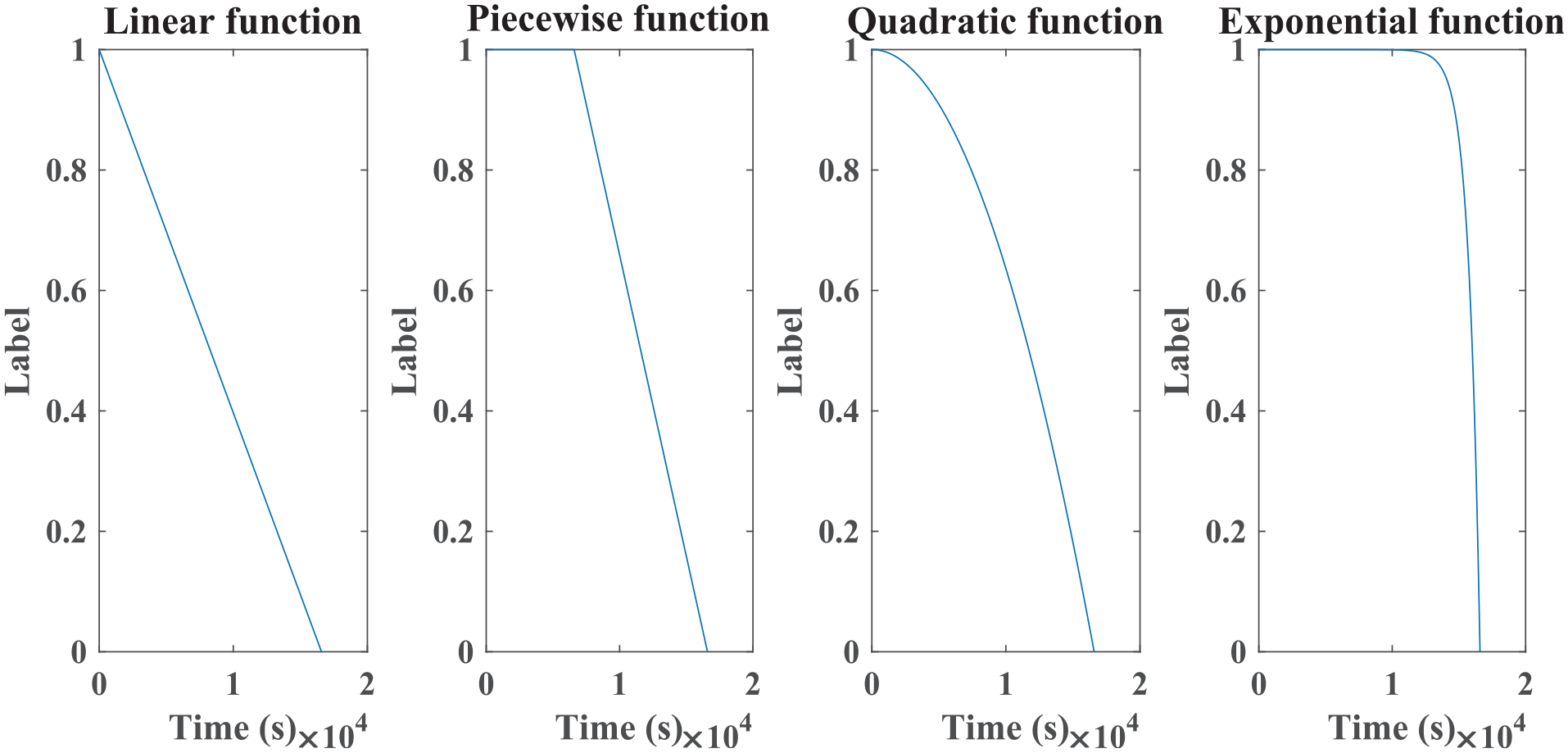
Illustration of labeling functions.
where

The architecture of the LSTM model is given in Table 1, and the model is trained under a Python (version 3.6.3) environment with the library of PyTorch (version 2.1.6). The hardware condition is a workstation that contains an Intel I9-13900K processor, a memory of 128 GB, and one Nvidia GeForce RTX 4090 Graphics processing unit (GPU). To reveal the effectiveness of key hyperparameters (which are learning rate and batch size in this paper) on the model’s performance, we conduct a sensitivity analysis via grid search, and details are given in Table 5. Using the loss as an estimation index, we depict the sensitivity analysis results in Figure 14 to determine the optimized hyperparameters (by selecting the minimum loss value), which would also guide further tuning for different scenarios in future research.
Summary of hyperparameters in the sensitive analysis.
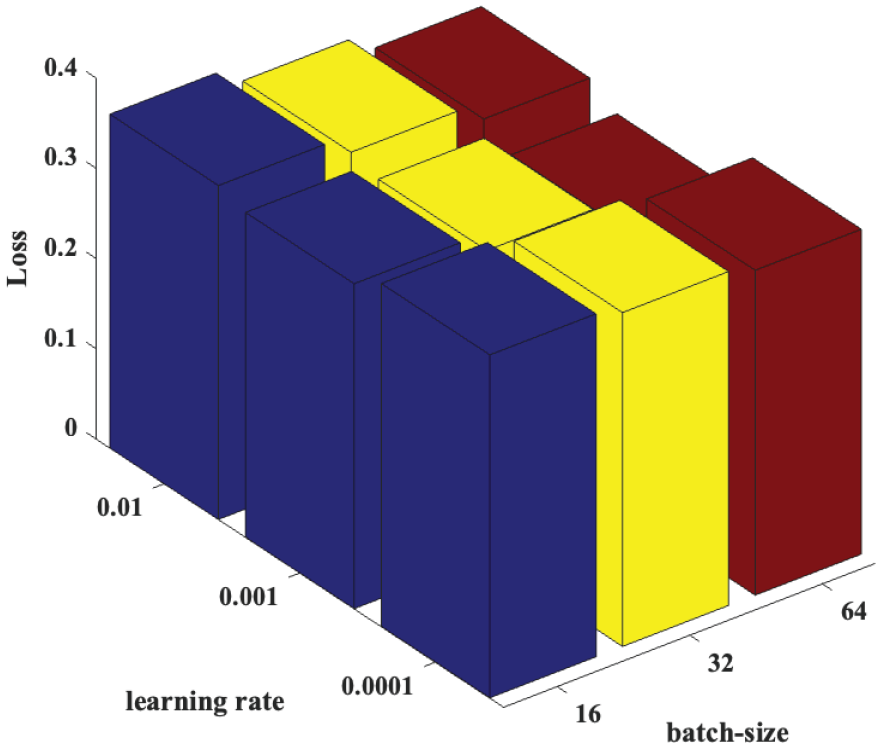
Sensitivity analysis results among different hyperparameters.
According to the sensitive analysis, the batch size is set to 64, and the initial learning date of
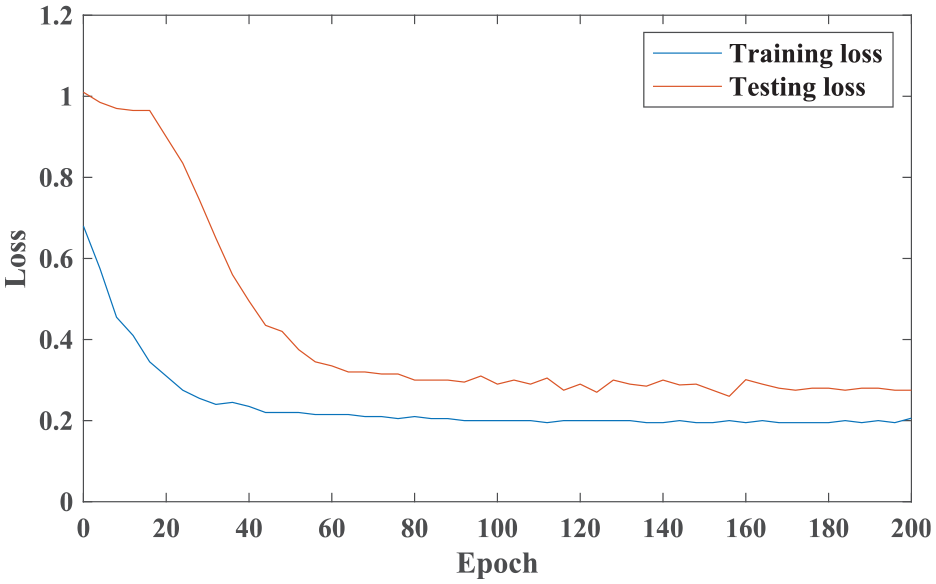
Learning curves of Test 1.
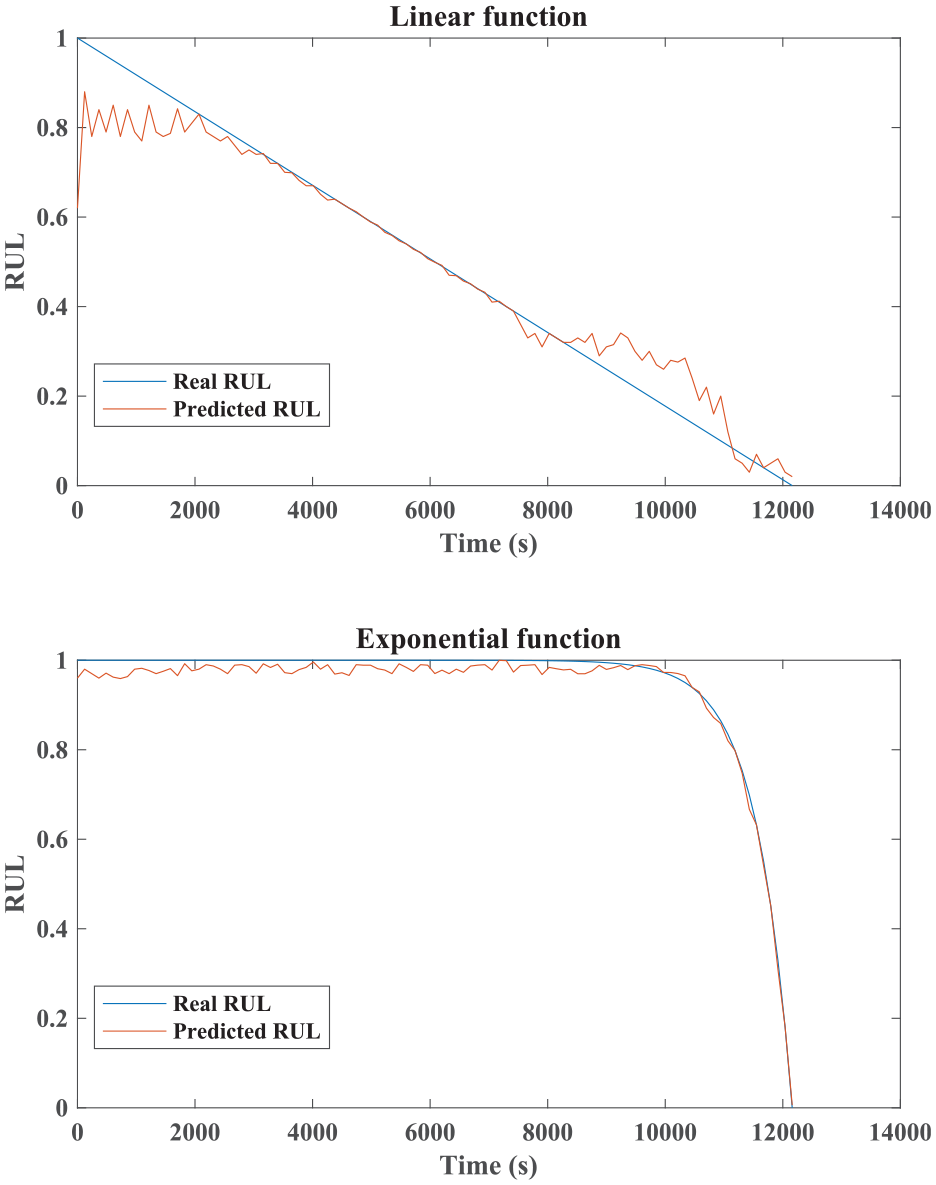
RUL prediction results of Test 1 with labels of linear function and exponential function.
To quantitatively evaluate the prediction performance of the proposed method, the root mean squared error (RMSE), which is a commonly used metric for prediction, is used in this paper:

where
The prediction results of Test 1 and Test 2 under four labeling functions are depicted in Figure 17, and we can see that the predicted values using the exponential labeling function are the smallest, compared to other labeling functions. This phenomenon can be attributed to the reason that the degradation process behaves with a slow monotonic tendency (i.e., a gentle curve in the early stage, and an abrupt change at a later period), which aligns better with the exponential labeling function than the other three functions. Moreover, to demonstrate the superiority of the PINN (i.e., the embedded physical knowledge of reliability engineering and failure procedure described via the Weibull distribution), a traditional LSTM model is also trained to forecast bearing RUL. The constructed HI, training and testing datasets, architecture of LSTM, and training hyperparameters are all set the same as the proposed PINN model, while the only difference is the loss function, that is, no Weibull-loss function is employed. The comparison results are given in Table 6, and we can see that the proposed PINN model outperforms the traditional LSTM model, which verifies the benefits of incorporating physical knowledge.
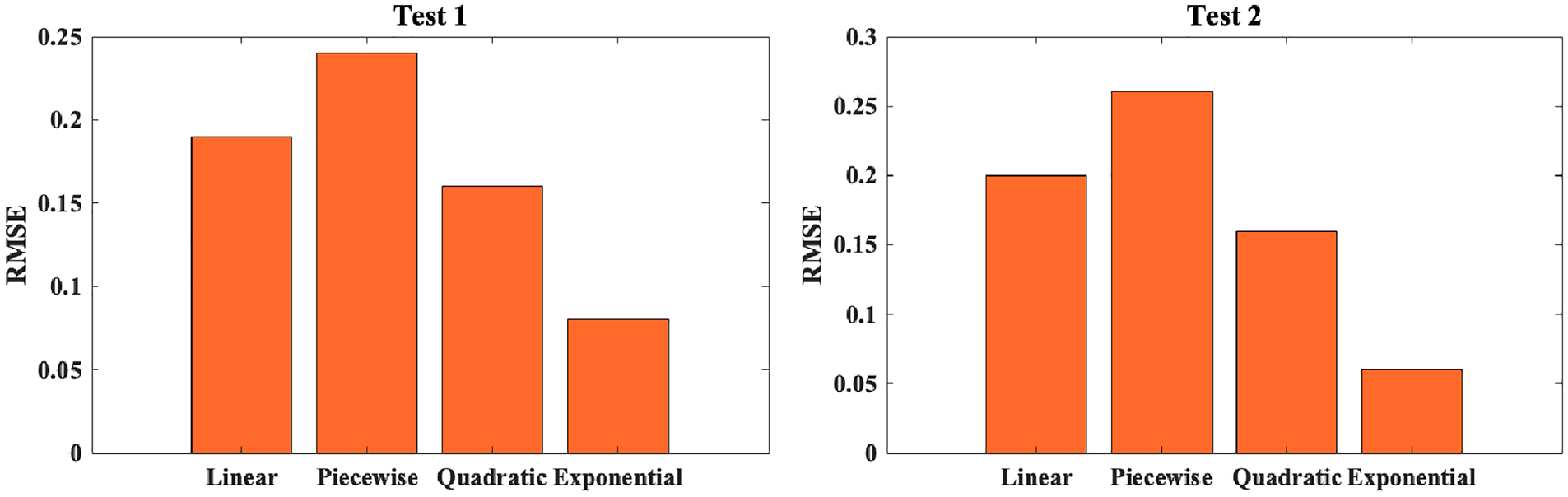
Comparison results among different labeling functions.
Comparison of prediction performance between PINN and LSTM.
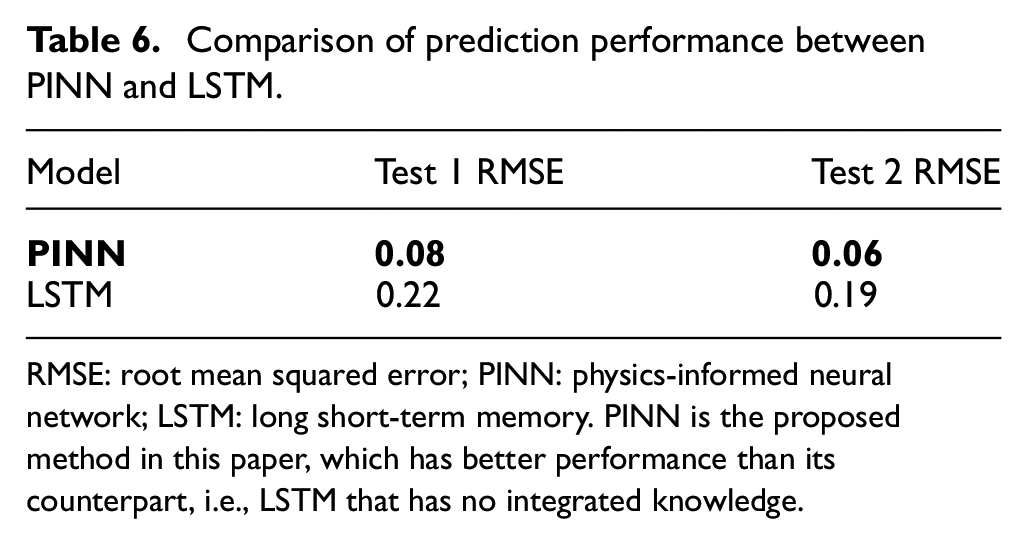
RMSE: root mean squared error; PINN: physics-informed neural network; LSTM: long short-term memory. PINN is the proposed method in this paper, which has better performance than its counterpart, i.e., LSTM that has no integrated knowledge.
Advantages analysis
Finally, to further improve the advantages of the proposed method in this paper, we implement a comparative study between the proposed method (IDEn-enabled HI and PINN) and other existing methods in the literature. Elforjani37,38 extracted RMS and SIE from AE signals to construct HI and implement bearing RUL prediction by training an ANN model, which has three hidden layers and one output layer. Moreover, the sigmoid function and resilient back-propagation algorithm are used to improve the prediction results. Motahari-Nezhad and Jafari 41 computed a series of time-domain metrics of AE signals and selected prominent features via the correlation-based feature selection approach. They found that the Jordan feedback neural network with the Bayesian Regularization training algorithm is capable of forecasting bearing RUL with the least error. In addition, Motahari-Nezhad and Jafari 40 also determined significant frequency-domain features from AE signals and trained a radial basis function (RBF) neural network to realize bearing RUL prediction with promising performance. The results between the proposed method and the existing methods mentioned above are compared to confirm the superiority of the proposed method. In addition, to better position the proposed method within the existing body of research, two traditional prognostic techniques belonging to the statistical approach, that is, the AR model and the PF model, are employed as counterparts. IDEn works as a feature to construct the HI curve, and the prediction models for bearing forecasting are developed via the AR and the PF model, respectively. The final results of the comparison are illustrated in Figure 18, and we can observe that the proposed method has the lowest value of the RMSE, that is, the highest prediction accuracy between the predicted and actual RUL. In other words, the proposed method in this article outperforms current methods, which can provide good guidance for future work.
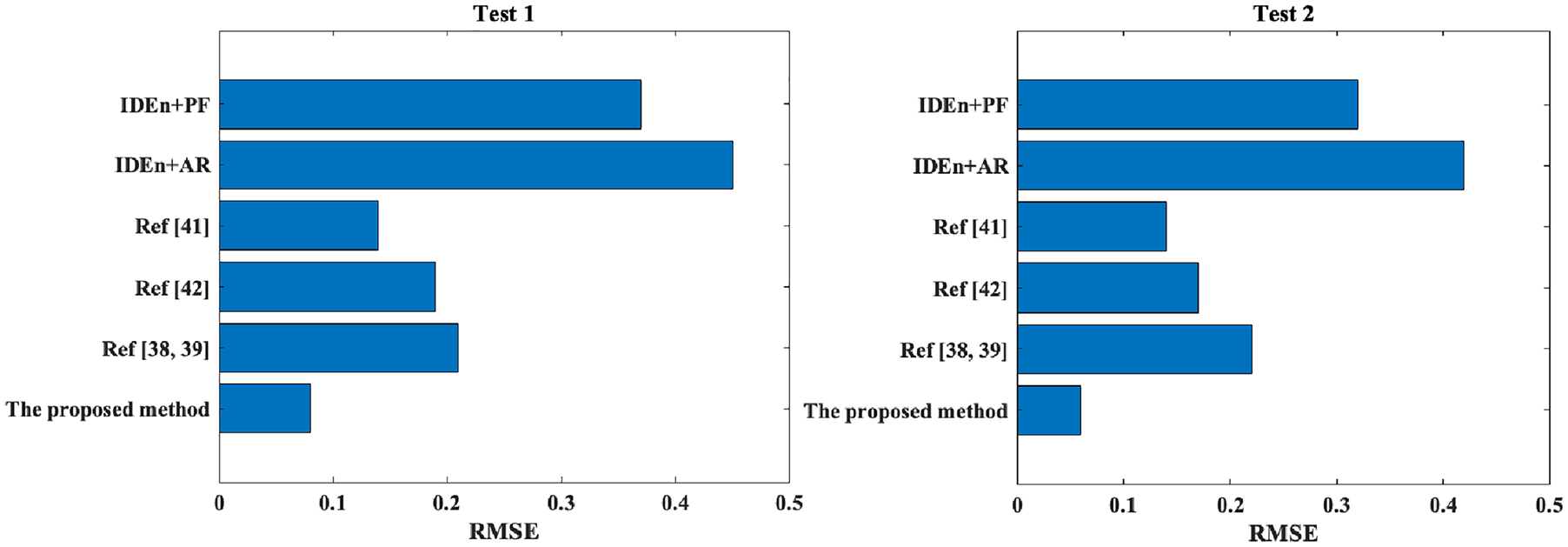
Comparison results between the proposed method and other existing methods.
Conclusion
Recently, data-driven methods, particularly DL-based models, have been employed for RUL prediction of bearings. However, these methods cannot incorporate physical knowledge that can improve interpretability and generalization for multiple application scenarios. Therefore, in this paper, we propose a novel bearing RUL prediction method based on AE signals and a PINN model. Experimental tests and corresponding results verify the effectiveness and superiority of the proposed method. Some conclusions are given as follows.
(i) Experimental results indicate that the proposed method can forecast bearing RUL accurately, and this excellent prediction performance has good potential in practical applications.
(ii) Compared to current time-domain features, the proposed IDEn in this paper can characterize AE signals and construct HI for RUL prediction with better performance, including monotonicity, robustness, and trendability. Thus, we may expect further application of IDEn for signal processing in the future.
(iii) Four different labeling functions are compared in this paper, and the results suggest that the exponential function has the best capacity to represent the degradation process of bearing, which provides an important reference for future investigations.
(iv) The physical knowledge, that is, reliability engineering and failure procedure described via the Weibull distribution, is incorporated into the LSTM model to construct a PINN by developing a Weibull-loss function. According to experimental results, this PINN model outperforms the LSTM model that utilizes traditional loss function only, that is, the integrated physical knowledge provides significant benefits. The integration method of knowledge in this paper is easy to implement, and more work should be encouraged to improve bearing RUL prediction performance in the future.
Some limitations and the resulting future work in this paper should also be taken seriously, for example, (1) the computation cost of feature extraction should be reduced by proposing more convenient methods or using other high-performance languages such as Rust to speed up the calculation of IDEn, (2) the instability caused by selecting improper shape parameters in the Weibull function, which may be rectified by changing model architectures and hyperparameters. In addition, only stable working conditions are considered in this paper, further investigations should focus on variations of operating conditions, which are more common and practical in real industry. It is worth noting that TL has demonstrated immense potential in solving RUL prediction problems under varying working conditions. Thus, we can expect that the proposed method might be adapted to handle such variations via the TL strategies. For example, after constructing HI curves via IDEn, we can train a new LSTM prediction model that has better generalization ability using the adversarial domain adaptation technique to ensure RUL forecasting performance under varying working conditions. Finally, in this paper, only complete and clear AE signals are considered; further investigations should be conducted to handle cases where AE signals are missing or corrupted, for example, using generative adversarial nets (GAN) to fill in deficient data.
Footnotes
Acknowledgements
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was partially supported by the Natural Science Foundation of China (Grant Number: 52205061), the Hong Kong Scholar Program (Grant Number: XJ2022017), and the Chinese University of Hong Kong (Project ID: 3110174). We greatly appreciate their financial support.