
Abstract
Structural health monitoring (SHM) plays a vital role in maintaining the safety and function of civil infrastructure; however, conventional monitoring approaches typically rely heavily on manual access, fragmented data acquisition, and offline analysis, which limits efficiency and scalability. In recent years, robotic systems and unmanned aerial vehicles (UAVs) have gradually emerged as a highly promising method towards more automated and flexible SHM practices. This article synthesizes recent advances in robot- and UAV-based inspection across diverse infrastructure types, including bridges, buildings, dams, and underground spaces, examining their mobility characteristics, sensing configurations, and application scenarios. Particular attention is paid to algorithmic progress in autonomous navigation, defect detection, 3D reconstruction, and emerging edge-intelligence concepts that enable perception-driven inspection workflows. Based on the reviewed literature, key technical advantages and persistent limitations of current robotic and UAV platforms are identified, including challenges related to onboard intelligence, energy efficiency, environmental robustness, and operational integration. Finally, the article outlines future research directions toward intelligent, cooperative, and scalable mobile SHM systems, supporting the transition of robots and UAVs from data-acquisition tools to field-deployable inspection agents for resilient infrastructure management.
Introduction
Structural health monitoring (SHM) generally refers to the continuous or periodic observation of structural responses through various sensing and data-acquisition systems to evaluate the integrity, performance, and safety of engineering structures throughout their service life.1,2 Typically, SHM systems employ networks of sensors, such as strain gages, accelerometers, displacement transducers, and fiber Bragg grating sensors, to measure parameters including strain, acceleration, temperature, and vibration modes. 3 By processing and interpreting these measurements, SHM provides quantitative insights into structural condition evolution, enabling early damage detection, reliability assessment, and maintenance decision support for bridges, buildings, dams, and other critical infrastructures.4,5
Traditional SHM systems, however, often rely on point-based wired sensors that require extensive cabling and manual installation, leading to high labor costs and complex maintenance procedures.4,6,7 For large-scale or spatially distributed structures, achieving adequate sensing coverage necessitates dense sensor networks, which are difficult to implement and maintain with conventional wired instrumentation. Moreover, many existing systems still depend heavily on manual inspections for data interpretation and damage localization, rendering them labor-intensive and inefficient for long-term monitoring. These limitations highlight the urgent need for more advanced and intelligent monitoring solutions capable of automating data acquisition, processing, and decision-making, thereby improving the efficiency, accuracy, and sustainability of infrastructure management.1,8,9 To overcome the spatial limitations of point-based sensing, recent SHM research has increasingly adopted high-density and distributed sensing technologies such as terrestrial laser scanning and distributed optical fiber sensing.10–13 While these approaches significantly enrich structural monitoring data, they also create growing demands for efficient data processing and interpretation. As a result, advances in sensing hardware alone are not sufficient; scalable and adaptive SHM increasingly depends on intelligent analytics that can transform large volumes of raw measurements into decision-relevant information.14–17
Over the past decade, the rapid evolution of artificial intelligence (AI), robotics, machine learning and computer vision technologies has significantly reshaped the technological landscape of numerous engineering disciplines, including SHM.9,18,19 The 2010s witnessed the breakthrough of deep learning and computer vision algorithms, enabling machines to interpret visual data with accuracy once achievable only by human experts.20,21 Beyond computer-vision-driven inspection, recent SHM research has also advanced uncertainty-aware data interpretation and forecasting through probabilistic machine-learning frameworks, such as hierarchical sparse Bayesian learning and Bayesian dynamic linear models for extreme-event sensor streams,22–24 while adjacent developments in RFID-enabled crack monitoring further illustrate the expansion of intelligent SHM toward low-cost wireless sensing and automated condition inference. 25 The subsequent emergence of large-scale AI models, epitomized by the release of ChatGPT in 2022, marks a shift toward generalized, context-aware, and adaptive intelligence, catalyzing innovation across automation, perception, and decision-making domains. In parallel, advances in robotic mobility, remote sensing, and wireless communication lead to the development of autonomous systems capable of operating in complex and hazardous environments with minimal human intervention.8,9 As a result, smart SHM develops as a natural evolution of this technological convergence—integrating AI-enhanced perception, automated data interpretation, and cyber-physical control to revolutionize how large-scale and long-span infrastructures are monitored and maintained. The emergence of smart SHM marks a shift from conventional, manually operated monitoring systems toward autonomous, data-driven, and cyber-physical ecosystems. 26 In this context, SHM is no longer limited to passive data acquisition but evolves into an active process of perception, reasoning, and decision-making, integrating multi-modal sensing with real-time analytics and predictive modeling.27,28 This transformation is enabled by several technological frontiers that jointly bridge the physical and digital domains of infrastructure management.
Compared with representative existing reviews on robot- or unmanned aerial vehicle (UAV)-based SHM, the present study offers several notable contributions. First, the review scope covers a broad spectrum of infrastructure types, including bridges, tunnels, pipelines, and buildings, while integrating two major inspection approaches: robotic systems and UAVs. This provides broader representativeness than existing reviews that focus on a single type of structure, such as bridges only, as in Tian et al., 8 or that concentrate exclusively on UAV-based inspection, as in Panigati et al. 29 and Lyu et al. 30 Second, whereas existing reviews tend to emphasize either UAV hardware configurations 29 or deep-learning-based post-processing algorithms for image data, 30 the present study adopts a more holistic smart SHM perspective. Rather than placing substantial emphasis on basic introductions to hardware devices, it not only synthesizes recent state-of-the-art developments but also provides a more in-depth discussion of the current application status, technical limitations, and future development needs of robots and UAVs in intelligent structural monitoring. Specifically, it elaborates on the current development and future research prospects of intelligent technologies such as edge intelligence, onboard computing, and large language models (LLMs) in this field. In this sense, the value of the present review lies not merely in updating the recent literature, but in synthesizing how different mobile platforms collectively support the transition from merely data acquisition toward autonomous, scalable, and decision-oriented smart SHM. Finally, it aims to outline a coherent roadmap toward next-generation smart SHM systems that are intelligent, interoperable, and self-adaptive, thereby strengthening the connection between physical sensing, cyber intelligence, and resilient infrastructure management.
Robotic technologies for smart SHM
In traditional SHM, manual inspection or checks are limited not only by efficiency and cost but also by the difficulty of stable operation in extreme environments such as extreme cold, heat, and high altitude, resulting in biased results and limited coverage.31,32 Furthermore, traditional methods are highly dependent on technicians, and the inspection process is highly subjective, making it difficult to achieve early detection and accurate assessment of hidden defects.33,34
With the rapid development of robots, scientists are increasingly interested in applying them to SHM as an alternative to traditional inspection. Robots are reshaping SHM by extending their reach to hazardous or hard-to-access areas, enabling standardized, repeatable data acquisition, and coupling multi-sensor measurements with learning-based analytics.
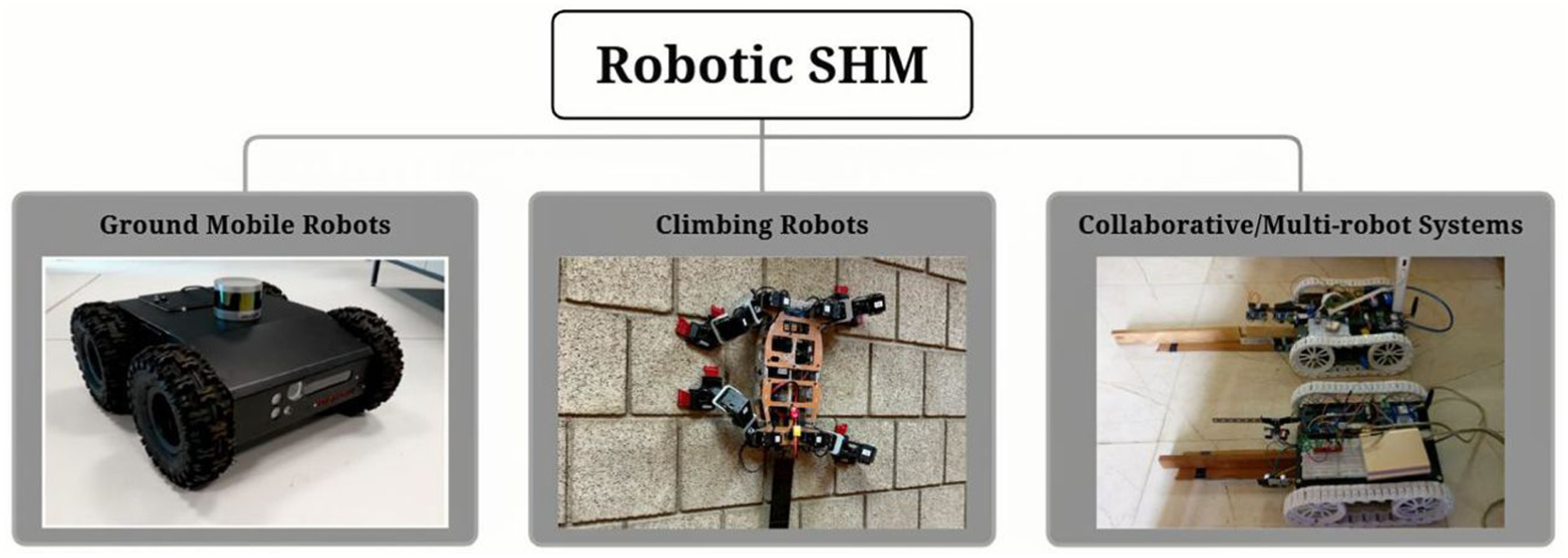
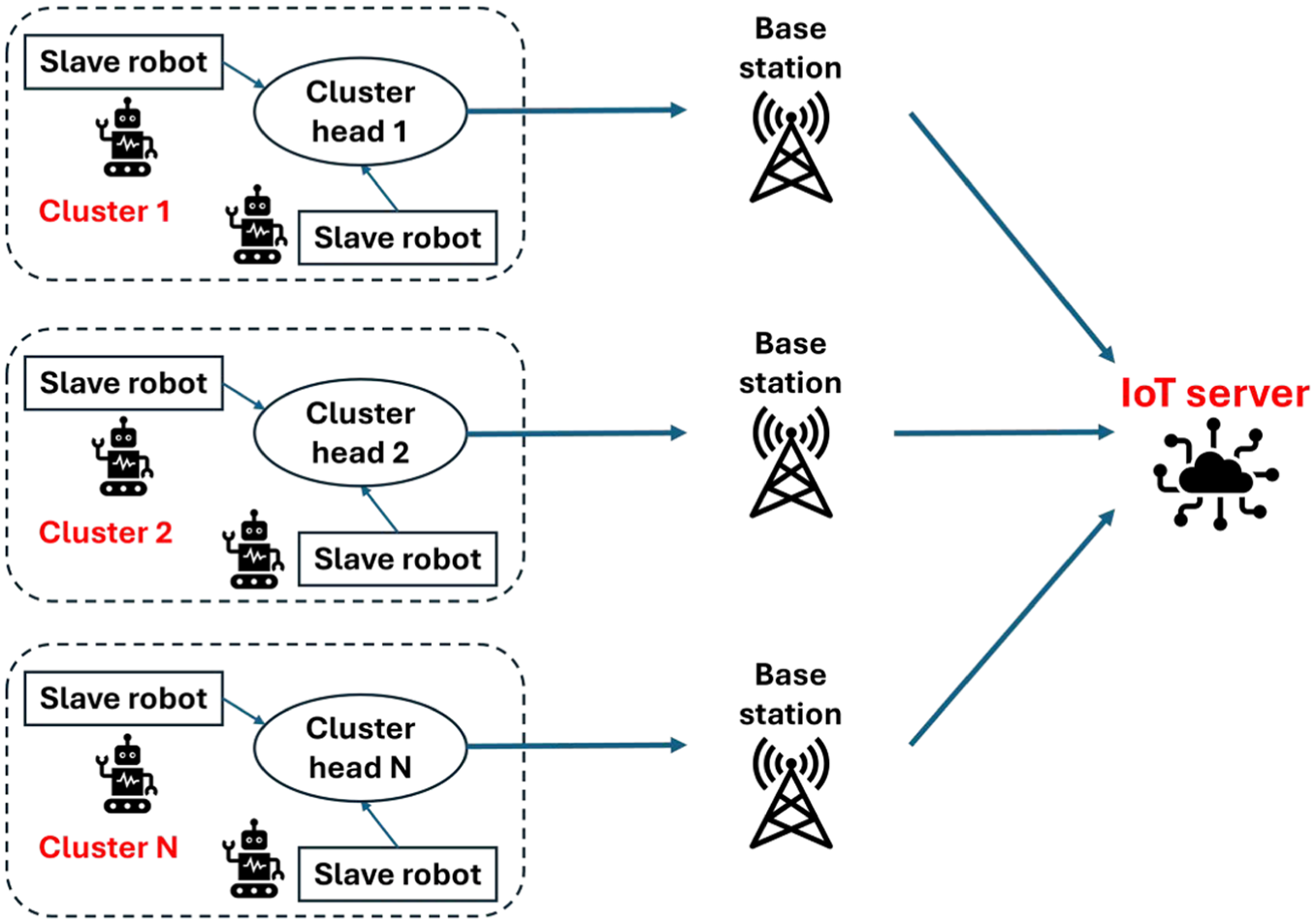
Robotic systems used for SHM are autonomous or semi-autonomous platforms equipped with diverse sensing payloads, such as LiDAR, cameras, or ultrasonic transducers, to perform data collection, inspection, and analysis of civil infrastructures with minimal human intervention.35,36 Ground mobile robots achieve terrestrial mobility through wheels, tracks, or legs, serving as mobile platforms for flexible data acquisition, while their motion trajectories are typically controlled by onboard navigation systems and simultaneous localization and mapping (SLAM-based) localization. In contrast, climbing robots employ adhesion mechanisms, which include magnetic, suction, or propeller-assisted, to traverse vertical or inverted surfaces, enabling access to otherwise unreachable structural zones.37,38 Recent research further explores heterogeneous and collaborative robotic networks that integrate ground, climbing, and aerial agents for multi-angle coordinated inspection, representing a key step toward fully autonomous and intelligent SHM ecosystems (Figure 1). 8
In this section, recent studies on robotic applications in smart SHM are reviewed to reveal the development of different robot types for various monitoring aims. The Web of Science database is employed as the primary source for literature review. The keywords used for searching mainly include (“robots” OR “robotic”) AND (“structural health monitoring” OR “structure health monitoring” OR SHM OR inspection) for the topic; “structure” OR “infrastructure” OR “concrete” OR “pipeline” OR “tunnel” OR “dam” OR “dike” OR “bridge” OR “building” OR “facade” OR “pipe” OR “utilities” for the title. The time domain is restricted to 2015–2025; the document types used include (research and review) articles and proceedings papers. The initial search yields 84 articles. To further refine the dataset, the following screening criteria are applied. First, duplicate publications describing essentially the same research are removed, with only one representative paper retained. For example, both Loupos et al. 43 and Menendez et al. 44 report the robotic system developed within the ROBO-SPECT European FP7 project; in this case, only one study is kept in the final dataset. After duplicate removal, the remaining records are screened based on title and abstract, followed by full-text review. Studies are retained only if they address robotic systems for SHM or civil infrastructure inspection and demonstrate the deployment of robots in practical monitoring scenarios, such as field data acquisition or data post-processing. By contrast, studies focusing solely on robot system design (e.g., mechanical structure, control algorithms, or theoretical modeling), robot simulations in virtual environments, or purely theoretical data-processing methods without validation on real-world inspection data are excluded. Following this screening process, a total of 65 papers are retained for review. The collected documents are categorized by year and by the working principle of robots, and the categorized results are displayed in Figure 2.
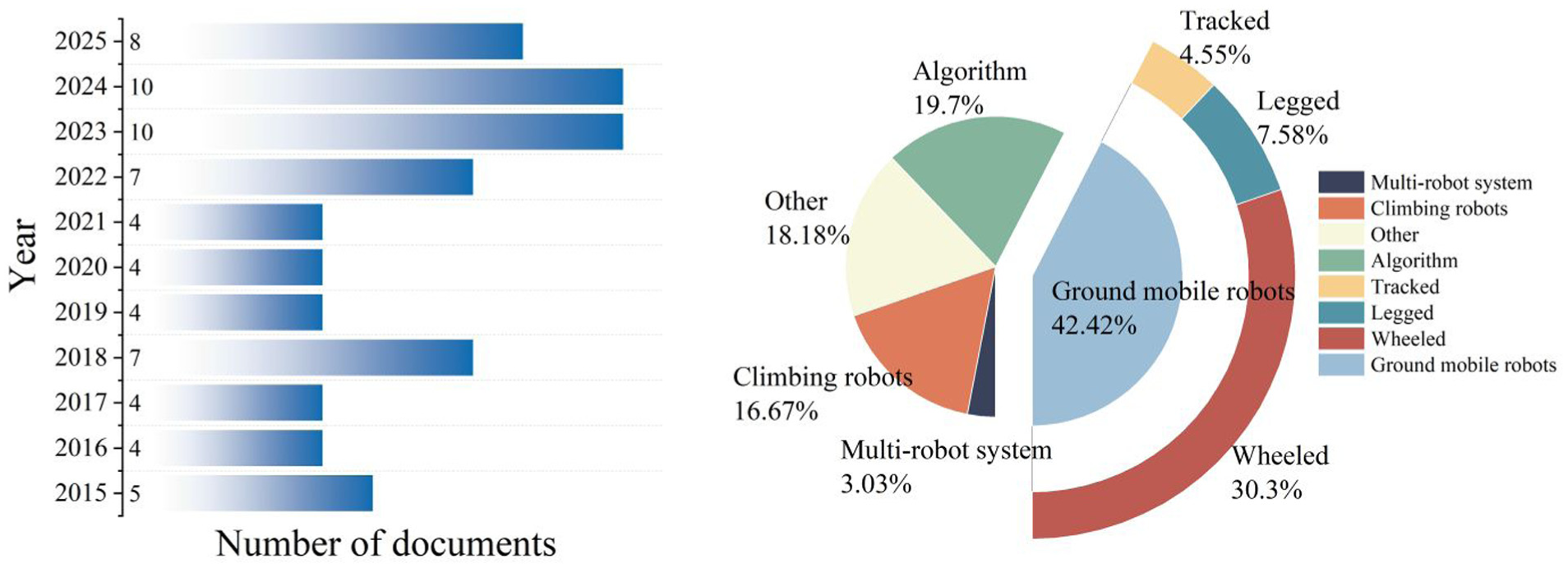
Overview of papers collected for robotic technologies for smart SHM.
Ground mobile robots for surface and terrain inspection
Ground mobile robots, ranging from wheeled and tracked vehicles to advanced four-legged (quadruped) platforms, are now widely deployed for the inspection of large-scale civil infrastructure. Technically, recent progress in SLAM, real-time navigation, and sensor fusion enables ground mobile robots to perform high-precision measurements in dynamic and unstructured environments. These robots enhance efficiency, repeatability, and safety by performing routine monitoring tasks with reduced or minimal human involvement, often in environments that are hazardous or inaccessible to human inspectors.
Wheeled and tracked robots
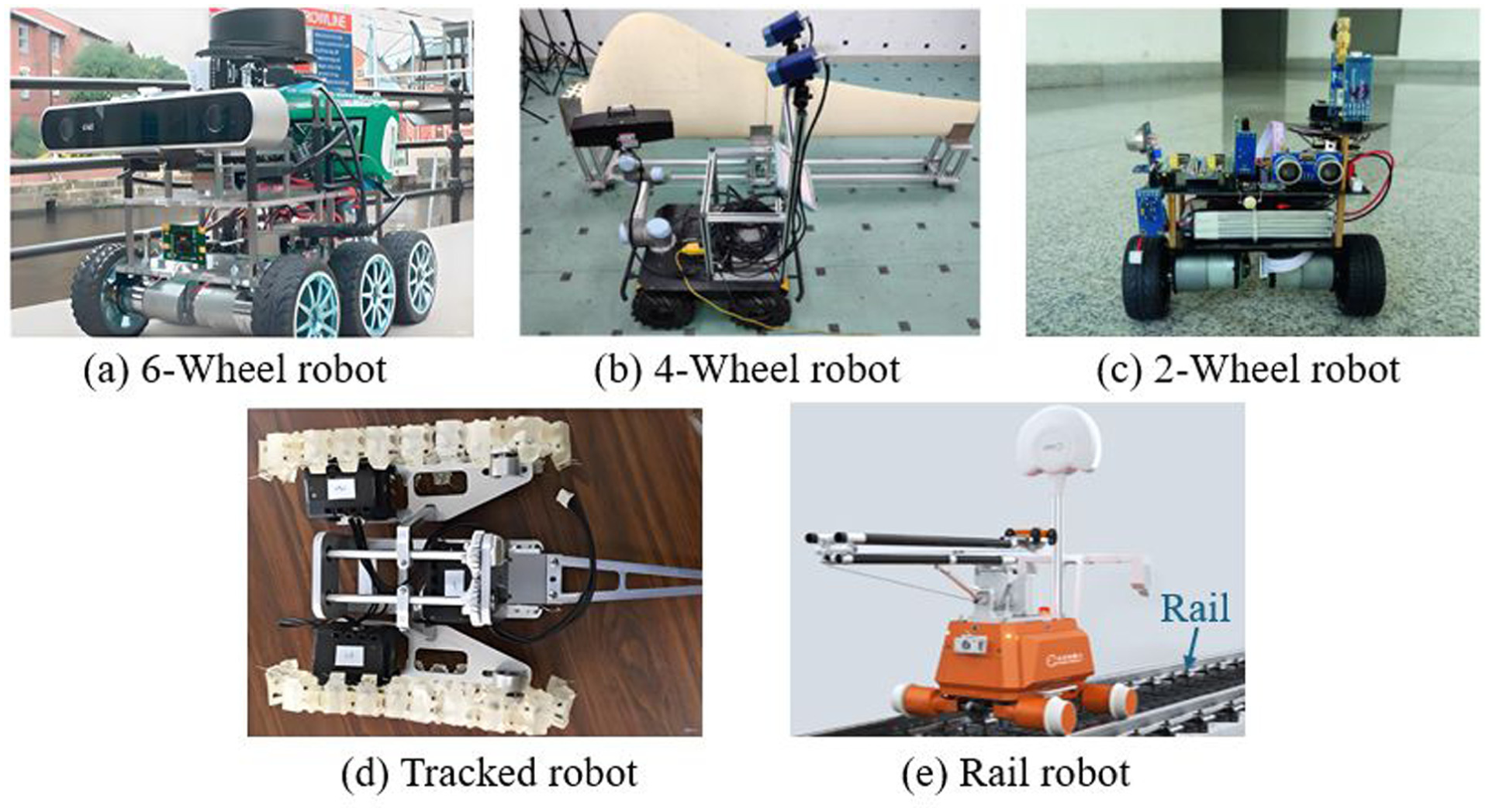
Ground mobile robots with wheeled or tracked mobility are among the most mature and widely used robotic platforms in SHM applications.45–49 They are particularly suited for flat or semi-structured environments, such as tunnels, bridge decks, and industrial facilities, where they can carry heavy sensor payloads and traverse long distances autonomously.50–52 Some typical ground mobile robots are shown in Figure 3. In this category, some robots are designed to move along predefined rails or channels, such as railway or bridge-guided inspection systems, where motion is restricted to a single direction but allows for repeatable measurements and precise localization.53–55 In contrast, legged robots rely on articulated multi-joint limbs that emulate animal or human gait, allowing them to step over obstacles, climb stairs, and maintain stable contact on highly irregular or cluttered surfaces in unstructured SHM environments. Compared with legged robots, wheeled and tracked robots generally offer smoother and more stable motion on even terrains, resulting in lower vibration-induced noise during data acquisition and more consistent sensor readings, especially for imaging or laser-scanning tasks.43,56,57
Buratowski et al. 39 develop a low-cost wheeled robot for real-time 3D mapping and inspection in underground industrial environments where GPS is unavailable, as shown in Figure 4. Equipped with LiDAR and an inertial measurement unit, the platform can navigate rough corridors and generate both 2D maps for navigation and 3D reconstructions for inspection. A lightweight SLAM framework supports localization and mapping on limited onboard computation. Field tests in an experimental mine show that the system can reconstruct corridor geometry and blockage conditions with sufficient fidelity for remote inspection and path planning. This study illustrates how inexpensive wheeled robots can support inspection-grade mapping in harsh GPS-denied environments.
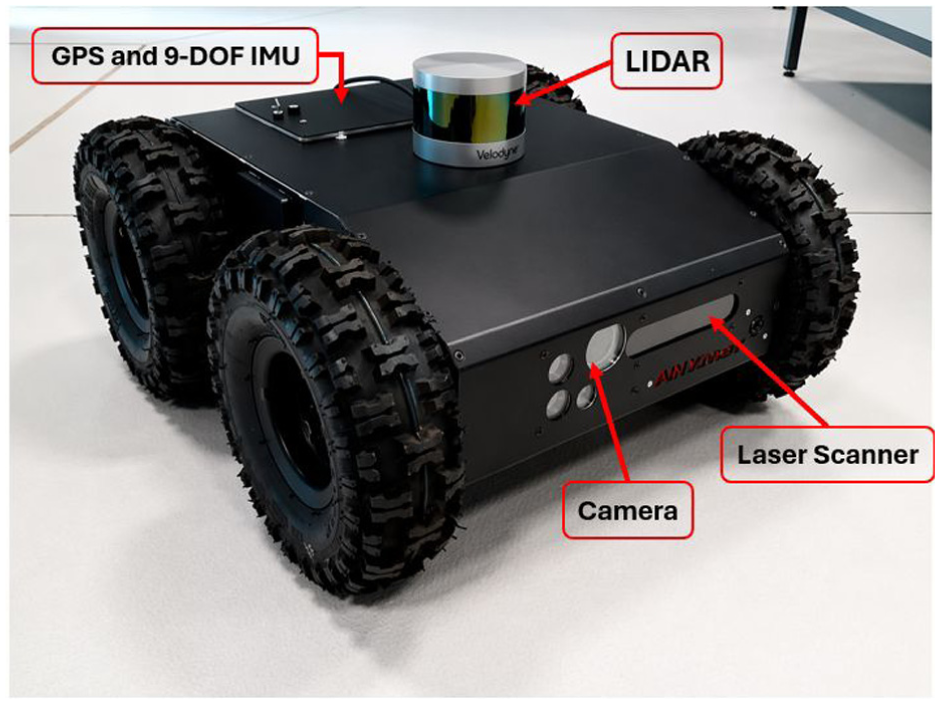
Four-wheeled mobile vehicle (by Dr Robot Inc.). 39
As shown in Figure 5, Menendez et al. 44 develop a wheeled robotic platform for autonomous inspection in railway and metro tunnels under GPS-denied and low-illumination conditions. The system combines visual and geometric sensing to support navigation and synchronized tunnel inspection, enabling the acquisition of imagery and 3D geometric data along tunnel linings. Field experiments in an operational metro tunnel demonstrate the feasibility of using compact wheeled robots for autonomous tunnel surveying and defect-oriented data collection. This study highlights the potential of camera–LiDAR-equipped ground robots to improve the efficiency and consistency of tunnel inspection in confined environments.
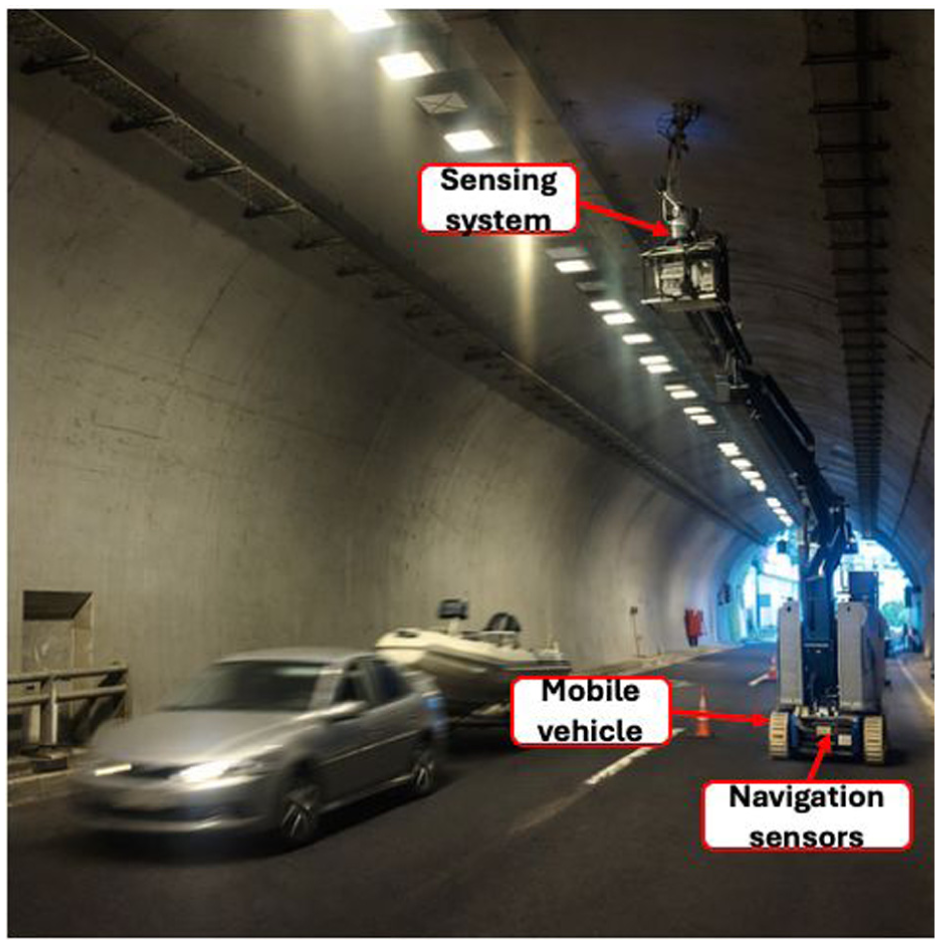
The four-wheeled robot used by Menendez et al. 44
Several subsequent studies further extend the application of wheeled and tracked ground robotic platforms for large-scale civil infrastructure inspection, with an increasing emphasis on autonomy, geometric accuracy, and deployment in constrained environments. As shown in Figure 6, Charron et al. 62 develop a rugged four-wheeled unmanned ground vehicle (UGV) equipped with synchronized laser scanners for autonomous soffit inspection beneath concrete bridge decks, demonstrating centimeter-level point-cloud reconstruction suitable for remote defect assessment. While this work highlights the potential of LiDAR-based geometry capture for overhead structures, Zhang et al. 63 focus on pavement inspection and propose a lightweight differential-drive robot that combines RGB-D sensing with adaptive fuzzy control to autonomously follow crack centrelines with millimeter- to centimeter-level accuracy, inspection of complex structural components. Wang et al., 59 for example, integrate a mobile base with an industrial robotic arm and a fringe-projection scanner, enabling automated, high-accuracy inspection of large curved elements through stereo-vision-assisted scan alignment. In parallel, Phillips and Narasimhan51,64 emphasize system-level autonomy by presenting a framework that allows UGVs to execute inspection plans, perform LiDAR-based localization, and reconstruct dense bridge-scale point clouds in GPS-denied environments, thereby demonstrating the benefits of repeatable and fully automated data acquisition.
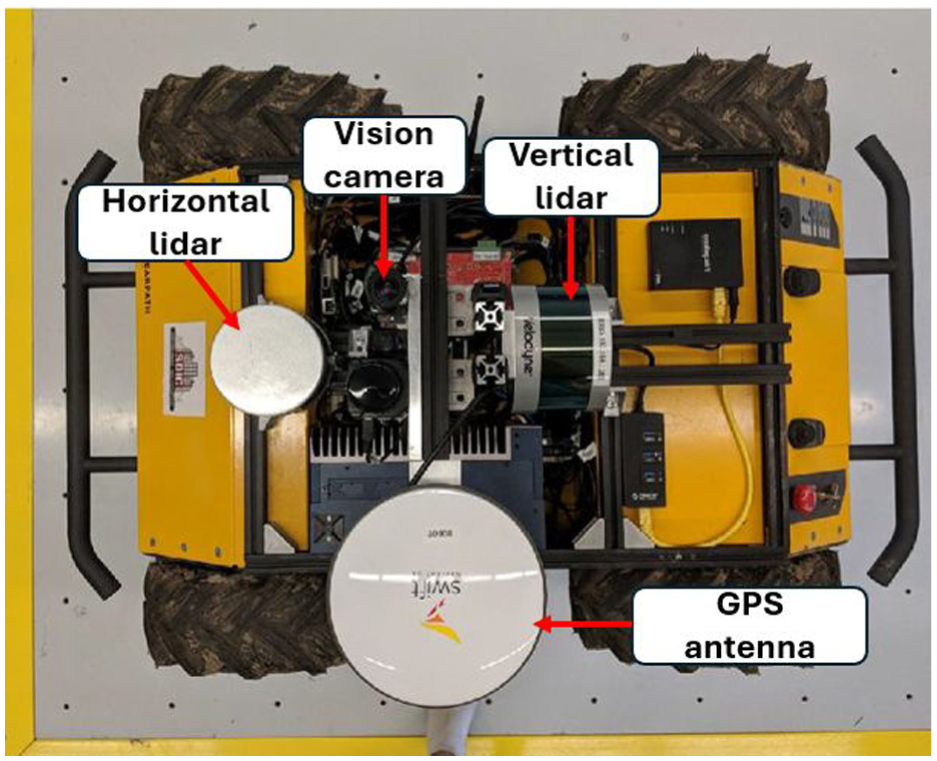
A four-wheeled ground mobile robot. 62
For inspection scenarios characterized by confined geometry and limited illumination, wheeled robotic systems have also been adapted for tunnel-like environments. Domin et al. 65 introduce a robotic measurement system based on structured-light scanning to achieve high-density geometric reconstruction under constrained lighting conditions, whereas Feng et al. 54 further extend tunnel inspection capability by integrating LiDAR SLAM, adaptive navigation, and defect-oriented data collection to support long-range mapping in GPS-denied settings. Similarly, Merkle et al. 47 explore a modular ground robot for industrial facility inspection, highlighting the role of real-time multi-sensor fusion in maintaining localization robustness within cluttered and electromagnetically noisy environments.
Together, these developments reflect a trend from remote data capture toward autonomous, multi-sensor, and structurally aware ground robotic inspection systems capable of generating consistent and high-resolution datasets across diverse civil infrastructure settings.
Legged robots
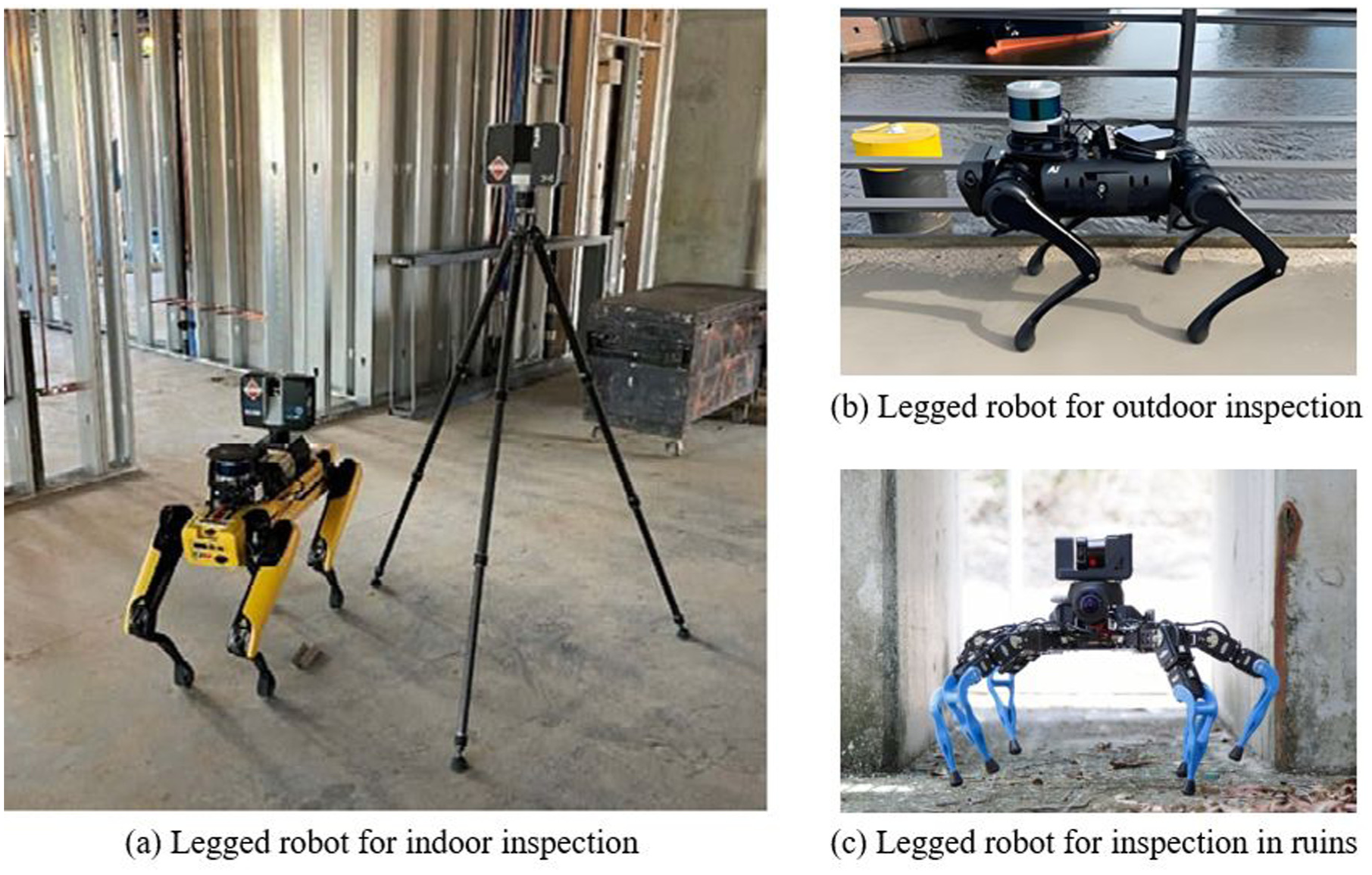
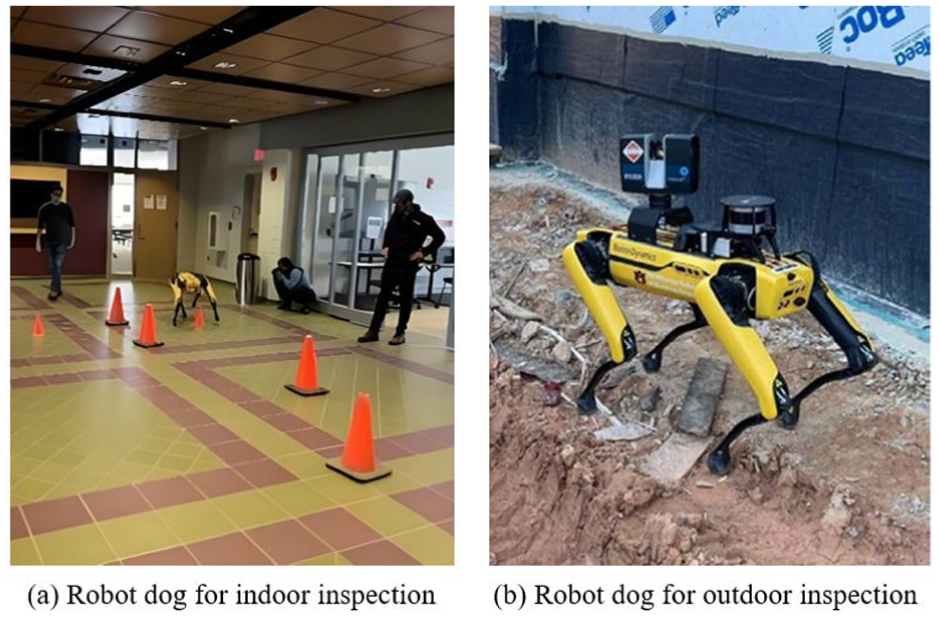
While wheeled and tracked robots perform well in relatively smooth terrains, they face challenges in highly uneven or cluttered environments, such as climbing stairs.66,67 Legged robots thus emerge as a promising alternative, offering superior adaptability for SHM tasks performed on irregular or obstacle-dense surfaces. Some examples of operating legged robots are shown in Figure 7. However, such adaptability comes at the cost of higher system and control complexity: legged robots require precise gait coordination, real-time balance maintenance, and high-dimensional motion planning for each limb.35,68 These demands not only increase hardware and computational requirements but also limit the achievable speed and energy efficiency compared with wheeled platforms, which exhibit smoother motion and lower vibration levels, especially on flat terrain.69–72 Consequently, legged robots are best suited for operations in highly irregular or hazardous environments where conventional wheeled systems cannot maintain stability or traction.

Smarsly et al. 56 propose a mobile SHM concept in which quadruped robots function as mobile sensing nodes and modal-testing agents, as shown in Figure 8(b). Instead of relying on dense stationary sensor deployments, the robots autonomously move across predefined measurement locations, collect vibration responses, and perform basic spectral processing on board before transmitting condensed modal information to a remote server for mode-shape reconstruction. Implemented on commercial quadruped platforms with LiDAR and inertial sensing, the approach demonstrates that legged robots can recover modal characteristics of a pedestrian bridge with accuracy comparable to stationary wireless systems while requiring fewer sensing nodes. This work highlights the potential of legged robots to reduce deployment effort and improve mobility in structural vibration monitoring (Figure 9).
Several recent studies advance the application of legged robots in SHM by strengthening autonomous perception, human–robot collaboration, and site-scale data acquisition. In construction and inspection scenarios where human presence is unavoidable, quadruped robots have been shown to support repetitive monitoring tasks in close coordination with operators. Halder et al., 74 for instance, demonstrate that legged robots can reliably perform routine inspection missions alongside human workers, contributing to improved site safety and monitoring efficiency. Similarly, Afsari et al. 76 show that a commercial robot dog equipped with a 360° panoramic camera can autonomously traverse predefined routes on active construction sites, enabling continuous visual documentation of construction progress over time.
Beyond visual surveying, recent work increasingly integrates various sensing technologies and automated interpretation. Herbers et al. 77 employ a four-legged robot equipped with LiDAR and a pan–tilt–zoom camera to achieve automated facade mapping and defect segmentation, with detected damage projected onto reconstructed 3D meshes. Further, Wetzel et al. 75 confirm that LiDAR-mounted quadrupeds can conduct repetitive site-scale mapping with accuracy comparable to static tripod-based scanners, while substantially reducing operator exposure and setup effort.
In addition to perception capability, locomotion robustness and autonomy have emerged as key enablers for deploying legged robots in challenging SHM environments. Kolvenbach et al. 67 integrate force-controlled locomotion with perception-aware planning, allowing four-legged robots to traverse rubble and highly uneven terrain while maintaining stable scanning operations—an essential requirement for post-disaster or highly cluttered inspection scenarios. Building on this direction, Tandon et al. 66 develop an autonomous navigation framework that fuses LiDAR-based SLAM, terrain assessment, and footstep planning, enabling reliable inspection of large-scale civil infrastructure with minimal human supervision.
Collectively, these studies illustrate a shift from static sensing toward highly mobile, perception-driven legged platforms capable of navigating unstructured environments, maintaining measurement stability on uneven terrain, and autonomously collecting high-quality SHM data.
Climbing robots for vertical and submerged inspection
Climbing robots represent an important branch of mobile inspection technology, designed to access surfaces such as inclined roofs, tunnel sidewalls, curved shells, smooth facades, and beam soffits that are otherwise unreachable by ground or aerial robotic systems. On these inclined, vertical, or overhead planes, robots must overcome their self-weight and gravitational slip to remain attached, which necessitates specialized adhesion mechanisms that generate sufficient normal forces to counteract detachment. According to the physical principles of adhesion, these systems are broadly classified into magnetic, negative-pressure (suction), and thrust-assisted mechanisms.
Magnetic adhesion
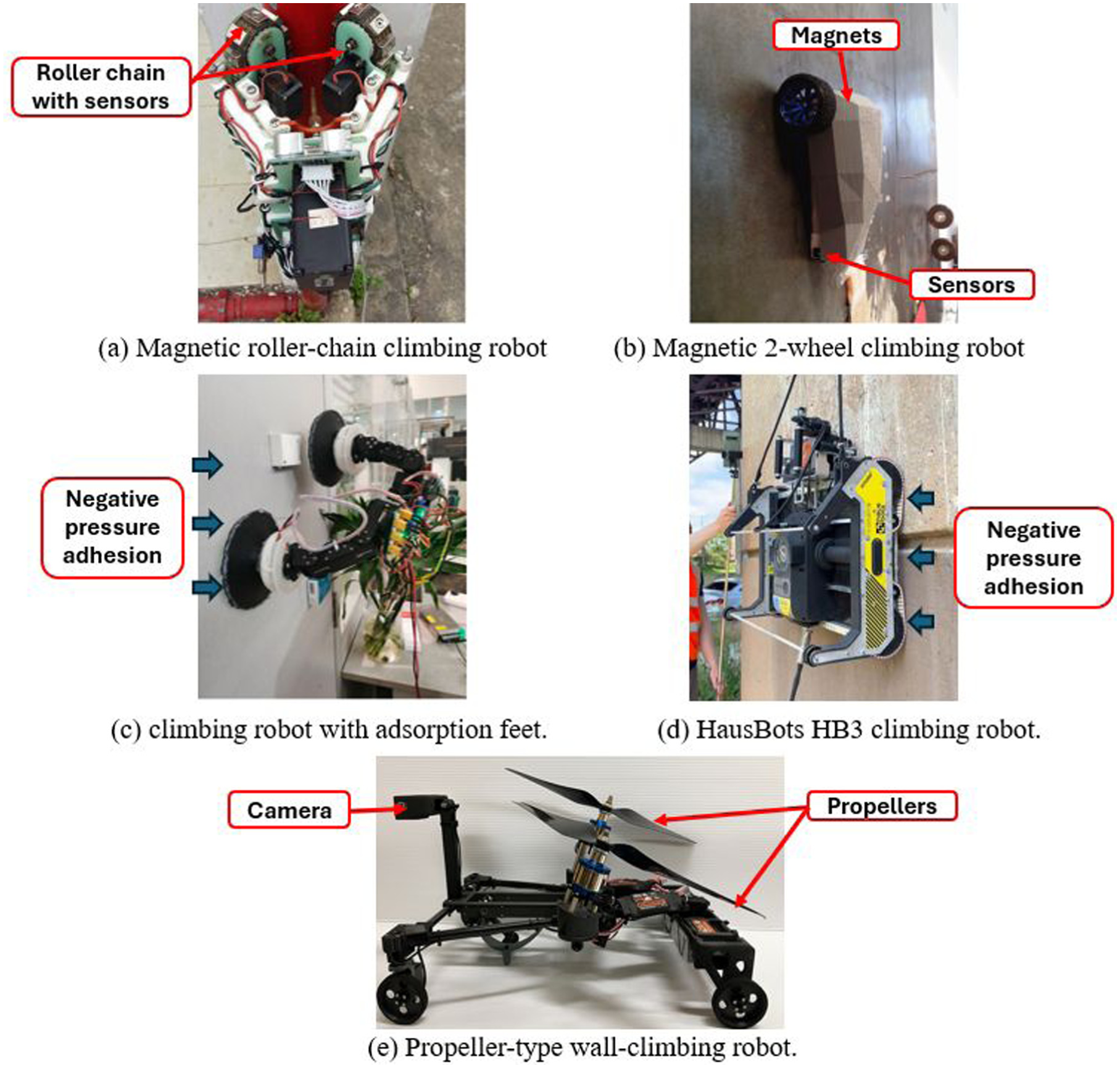
Magnetic adhesion is primarily used for ferromagnetic steel structures, such as steel bridges, pipelines, and storage tanks.37,78,79 An example of a magnetic roller-chain climbing robot is shown in Figure 10(a) and (b). This mechanism generates attraction between the magnetic units of the robot and the metallic substrate, producing stable normal forces for vertical and inverted locomotion. Permanent magnets offer high holding strength but limited controllability, while electromagnets or hybrid electro-permanent designs balance power efficiency with on-demand release.37,80,81
Negative-pressure (suction) adhesion
For non-magnetic surfaces such as concrete or glass facades, adhesion is achieved through pressure differentials generated by vacuum pumps or fans within suction chambers. Two typical negative-pressure adhesion robots are shown in Figure 10(c) and (d). The resulting negative pressure creates a normal force proportional to the pressure drop and contact area, allowing stable movement on vertical or overhead planes.38,86 Underwater climbing robots use similar suction principles but require watertight negative-pressure chambers and anti-drift fins to counter hydrodynamic forces. 86
Propeller-assisted (thrust) adhesion
Propeller or fan-based adhesion systems actively generate normal forces by directing thrust toward the target surface. Figure 10(e) shows a typical propeller-type wall-climbing robot for irregular surface inspection. 82 This approach is particularly suitable for rough, porous, or dusty concrete walls where direct suction may fail. Thrust-based adhesion flexibly adapts to multiple surface types and enables rapid attachment–detachment cycles, representing a bridge between aerial drones and conventional wall-climbing platforms. 82 By adjusting propeller speed and tilting the propeller units, the normal force is continuously tuned to provide sufficient contact pressure while compensating for local surface irregularities. However, the strong airflow generated by high-speed rotors may stir up dust, introduce additional vibration and acoustic noise, and potentially interfere with nearby sensors, which limit the applicability of thrust adhesion in some SHM environments.
Magnetic adhesion climbing robots
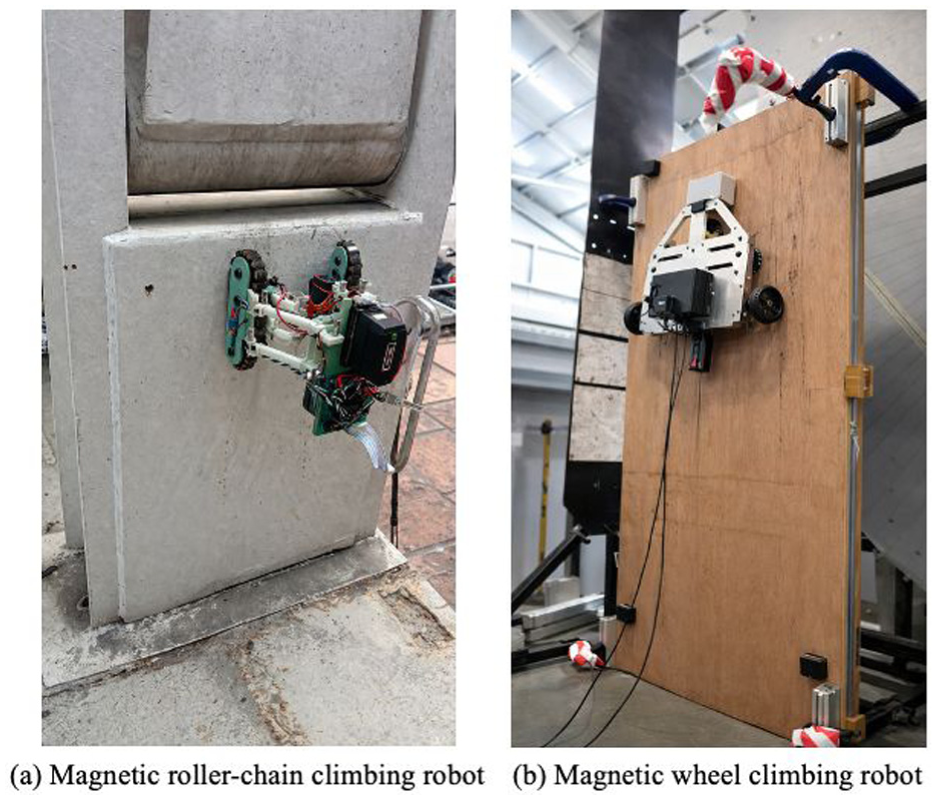
Nguyen and La 37 propose a dual-chain magnetic roller climbing robot for steel bridge inspection, in which a tank-like chassis with reciprocating roller chains allows smooth transitions between flat, curved, and cylindrical members while maintaining strong magnetic adhesion, as shown in Figure 12(a). In addition to Hall-effect, infrared, and inertial measurement unit (IMU) sensors for navigation and adhesion feedback, the platform carries two cameras for close-up visual imaging and a 5-DOF robotic arm that positions an eddy-current probe to interrogate fatigue cracks, ensuring that both surface appearance and subsurface defect signatures are collected during a single pass. The robot periodically pauses to acquire overlapping images and eddy-current traces, which are then transmitted to a ground station, where image stitching and crack-map generation are performed offline; extensive deployments on more than 20 bridges demonstrate reliable adhesion and robust multi-modal data collection, even on painted, rusty, and welded regions.
Moreover, Cho et al. 78 present a multifunctional cable-climbing robot (as shown in Figure 11) that exemplifies how magnetic adhesion integrates with multi-modal NDT (nondestructive testing) for steel infrastructure inspection. The system employs an array of permanent magnets mounted under a caterpillar-type chassis to provide stable normal adhesion forces while enabling smooth locomotion across flat and mildly curved steel surfaces. The robot incorporates a modular NDT suite, including laser vision sensors, an eddy-current probe, and an ultrasonic testing unit, allowing for sequential acquisition of geometric, surface-level, and subsurface defect information during a single inspection pass. A path-planning module maintains a consistent sensor–surface distance, while an onboard controller synchronizes magnetic-wheel actuation with sensor triggering to ensure data quality despite local roughness, weld seams, or paint layers. Field experiments on steel bridges demonstrate that the robot reliably detects corrosion pits, fatigue cracks, and weld discontinuities while maintaining stable adherence under varying surface conditions and transitioning smoothly across stiffeners and curved plate regions.
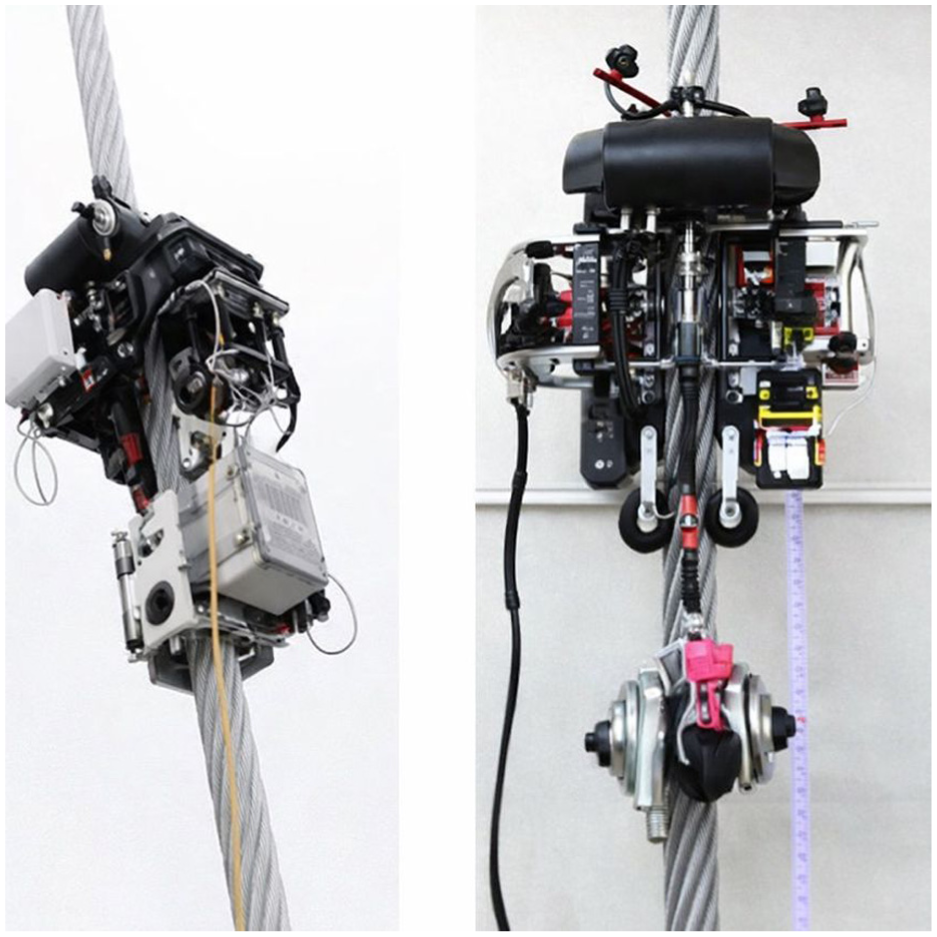
Application of magnetic adhesion robots on cable inspection. 78
Tseng and Kalaycioglu 79 propose a wheeled magnetic climbing robot for inspecting ferromagnetic structures, integrating magnetic wheels, vision sensing, and ultrasonic ranging to enable stable traversal of vertical steel plates while an embedded lightweight convolutional neural network (CNN) identifies cracks and corrosion. Bian et al. 87 extend magnetic–mechanical hybrid adhesion to curved steel cables, demonstrating reliable corrosion inspection on cable-supported structures. As shown in Figure 12(b), Gallegos and Sattar 80 introduce SIRCAUR, a compact crawler relying on permanent magnets to couple with reinforcement bars beneath concrete surfaces while carrying a GPR module for subsurface defect detection. More recently, Tse et al. 81 develop a magnetic crawling robot within a hybrid human–robot predictive maintenance framework for iron pipeline networks. The system combines YOLOv9-based corrosion detection, ultrasonic thickness measurement, and a compact 2WIS–2WID magnetic crawler capable of adhering to and maneuvering along pipelines, including flange traversal.
Negative-pressure (suction) adhesion robots
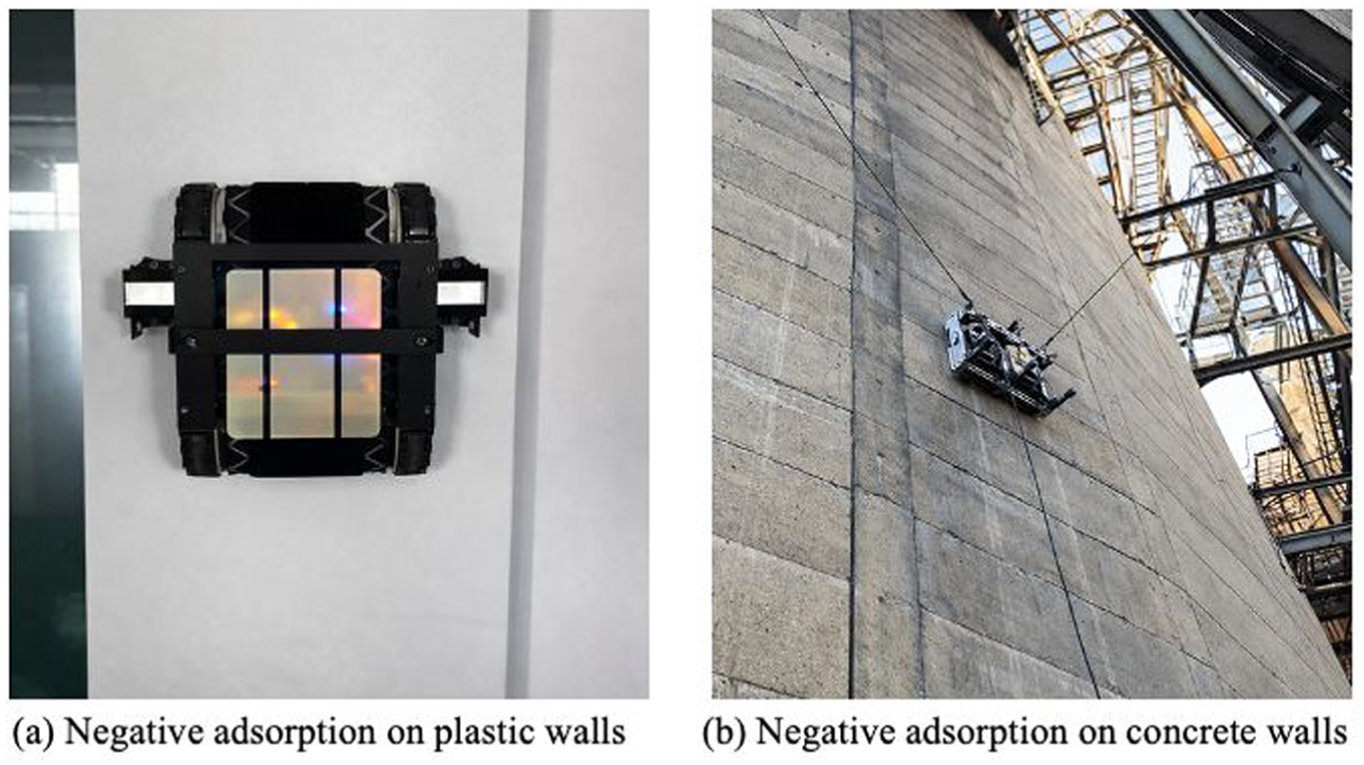
Negative-pressure or suction-based adhesion robots are primarily utilized for non-magnetic materials such as concrete, glass, or composite facades. By generating a pressure differential between a sealed suction chamber and ambient air, the robot maintains a firm attachment through the resulting normal force. As shown in Figure 13(a), Cao et al. 38 develop a rolling-adsorption wall-climbing robot (RWCR) that combines crawler locomotion with an integrated vacuum chamber to achieve continuous adhesion across surfaces of varying inclinations. The prototype employs a pressure regulation system to maintain stable suction at tilt angles ranging from 0° to 90°. Experimental results demonstrate that the RWCR traverses 5 m-long facades while maintaining air-tightness and frictional stability, effectively balancing mobility, payload, and energy consumption (Figures 14 and 15).
Conceptual IoT-enabled multi-robot system, adapted from Iyer et al. 42
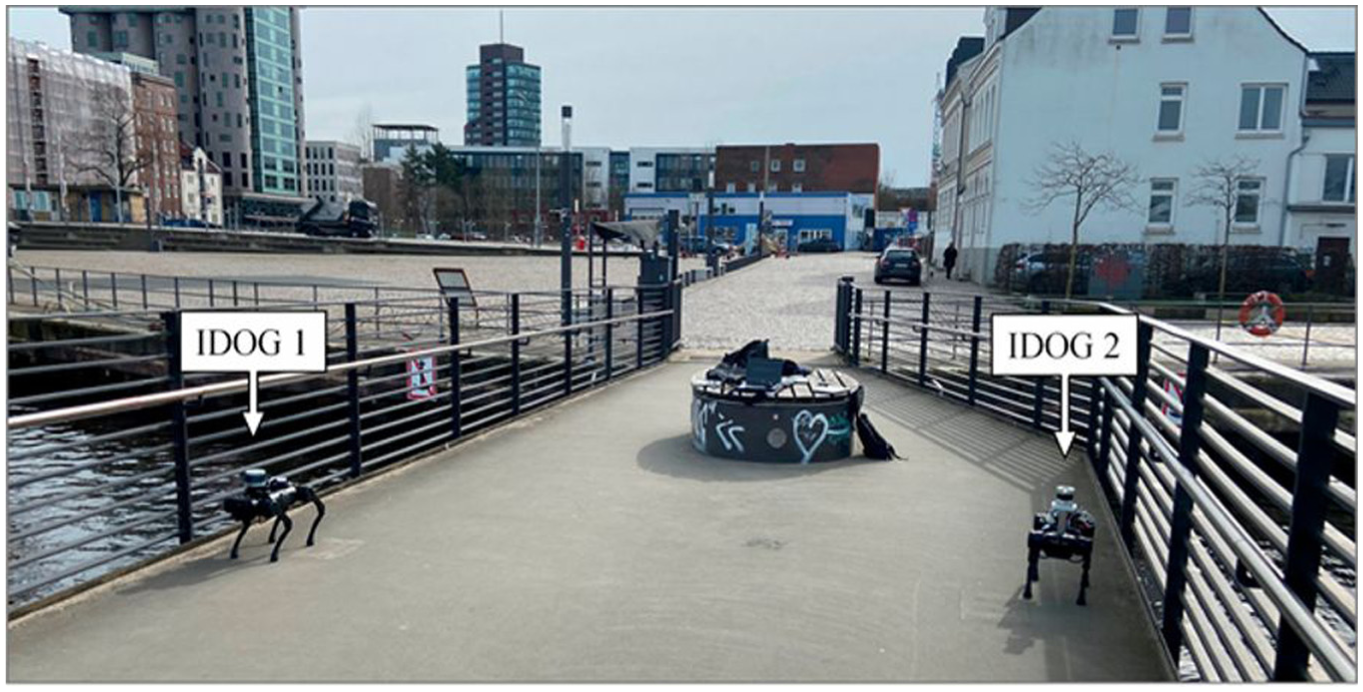
A two-robot collaborative system. 56
Several other systems adapt the suction principle for complex environments. In underwater contexts, Yu et al. 86 enhance suction-based adhesion through waterproof sealing and anti-drift fins, enabling stable underwater attachment against flow velocities of up to 1.6 m/s. Their vision-driven wall-climbing robot employs deep-learning crack segmentation and 3D reconstruction to generate digital twins of submerged concrete structures within 2 h.
A major recent advancement in suction-based adhesion is the development of hybrid airflow–vacuum mechanisms that overcome traditional limitations associated with rough concrete surfaces. HausBots LTD and collaborators 84 develop a wall-climbing crawler robot that generates low-pressure zones beneath the chassis, enabling reliable adhesion on vertical and even inverted rough concrete without the need for a ferrous substrate or a perfectly smooth surface. Traditional negative-pressure adsorption robots require sealed smooth surfaces to maintain a vacuum environment for adhesion; however, this robot uses airflow to create a pressure difference that enables attachment even on rugged surfaces. The working situation of this robot is shown in Figure 13(b). The crawler is designed to carry heavy ultrasonic tomography equipment and apply controlled contact pressure so that subsurface imaging of tall reinforced-concrete structures can be performed directly from the robot instead of through scaffolding or rope access.
Collectively, these developments underscore suction and suction-hybrid adhesion as some of the most versatile approaches in climbing robotics, enabling stable operation across terrestrial, underwater, and high-elevation environments while supporting sophisticated sensing payloads, including radar, tomographic arrays, and multimodal perception systems.
Propeller-assisted adhesion robots
Propeller-assisted adhesion robots utilize aerodynamic thrust to produce controllable normal forces, particularly suitable for rough, porous, or dusty surfaces where direct suction adhesion fails. Nishimura et al. 82 introduce a propeller-type wall-climbing robot designed for both visual and hammering inspection of concrete surfaces. The robot employs twin propellers that direct airflow toward the wall, actively countering gravity while maintaining stable contact. It integrates a hammering sensor to identify subsurface delamination and a stereo-vision module for surface mapping, enabling simultaneous geometric and material characterization. Laboratory experiments verify stable operation under low-friction conditions and sustained payloads exceeding 5 kg, while adaptive thrust modulation achieves precise force control and energy efficiency. This work demonstrates that aerodynamic adhesion not only enhances versatility across surface types but also bridges the functional gap between UAVs and traditional climbing robots.
Collaborative and multi-robot systems
Collaborative and multi-robot systems represent an advanced stage in the evolution of robots for SHM, where multiple autonomous agents cooperate to perform inspections, data collection, and decision-making in a coordinated manner. An example of a two-robot collaborative inspection system is shown in Figure 16. Unlike hybrid robots, which combine different locomotion or adhesion mechanisms within a single robot, collaborative systems involve multiple robots, often of the same or different types, working together through communication networks and shared sensing frameworks. These robots can be homogeneous, such as a fleet of identical UAVs surveying a bridge deck, or heterogeneous, combining ground, climbing, and aerial robots to achieve full structural coverage and multimodal sensing.8,50
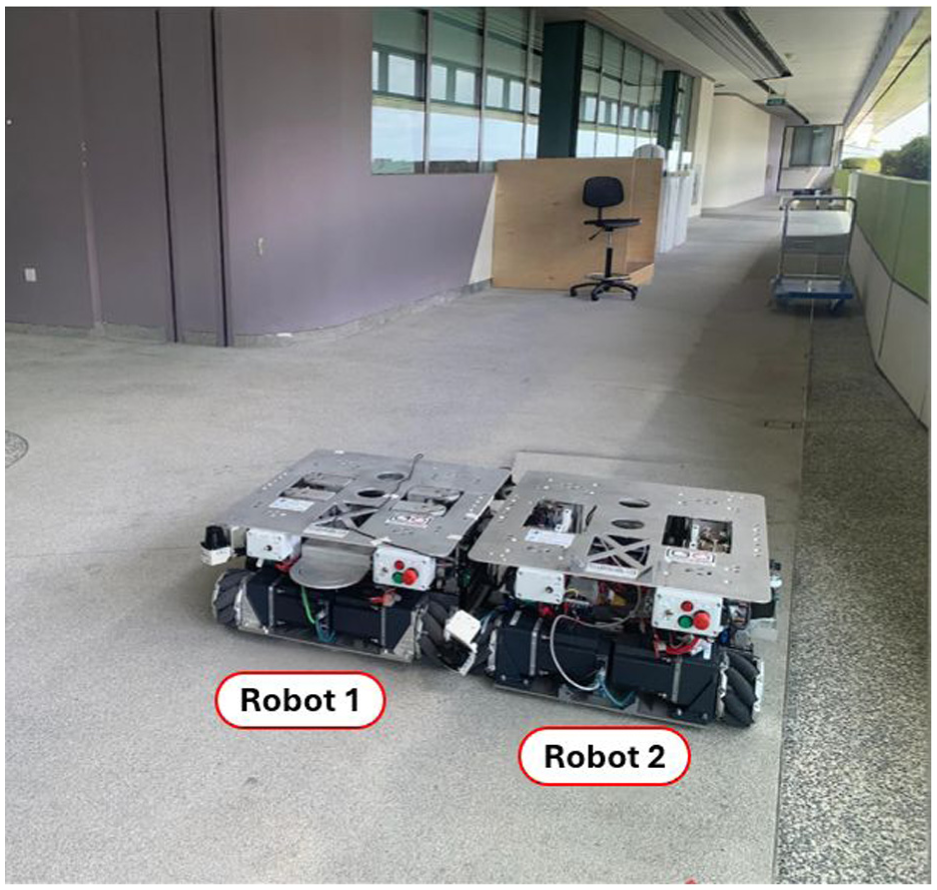
A two-robot collaborative inspection system. 88
In a typical collaborative architecture, multiple robots communicate via Wi-Fi, cellular, or dedicated IoT links to synchronize tasks, share sensor data, and adapt their trajectories in real time. For instance, Iyer et al. 42 demonstrate an IoT-based master–slave railway-track monitoring system, and Jahanshahi et al. 57 outline a swarm-robot paradigm. In such systems, the distinctive feature is not mechanical hybridization but coordinated specialization: some units emphasize data acquisition, while others serve as communication relays or mobile localization anchors, all coupled through shared communication and cloud-based or edge AI for mission planning and decision fusion.8,50 As a result, collaborative multi-robot systems provide scalable and fault-tolerant inspection networks for long linear infrastructures and spatially distributed facilities, achieving levels of coverage and autonomy that exceed those of any single robot.
IoT-enabled multi-robot inspection of linear assets
Iyer et al. 42 propose an IoT-based multi-robot framework for railway-track SHM that combines onboard sensing, wireless communication, and backend analytics. In this system, one robot performs visual and ultrasonic inspection of the rails, while other robots act as communication relays to forward data to a central server. Basic onboard intelligence is used to flag potential anomalies, and geolocation information is attached for maintenance reporting. Their results show that coordinated robots and IoT-based communication can support continuous and data-driven railway inspection more effectively than manual patrols. This study demonstrates how multi-robot cooperation can extend both sensing coverage and communication capability in linear-asset monitoring.
Related work illustrates how mobility and autonomy are embedded in routine site operations. Wetzel et al. 75 show that repetitive LiDAR campaigns using autonomous quadruped platforms on active construction sites reduce setup time and operator exposure while maintaining mapping fidelity. Further, Smarsly et al. 56 argue for fleets of legged robots as mobile SHM nodes that reduce the density of fixed sensors through planned, repeatable traversals with high measurement coverage. Extending these ideas to constrained linear environments, Sato et al. 89 demonstrate that multiple in-pipe robots deployed in distributed configurations reduce traction forces on cables, enabling significantly longer inspection distances. In recent years, the UK “Pipebots” project has pioneered the use of purpose-built robot swarms, such as the “Mega-Joey” platform, which integrates collaborative sensing and autonomous navigation to achieve pervasive inspection in complex, buried infrastructure networks. 90
Reconfigurable and swarm architectures
For reconfigurable architectures, Jahanshahi et al. 57 survey reconfigurable swarm robots as a modular and fault-tolerant approach for SHM. These systems consist of many small robotic units that physically connect, detach, or rearrange their configuration depending on the structure being inspected—such as spreading out over bridge decks for wide-area visual scanning or clustering around joints and cables for local NDT measurements. Each module typically carries simple sensors and communicates with neighboring units to share data and coordinate movements. By reorganizing themselves on site and distributing sensing tasks across the swarm, these robots maintain coverage even if individual units fail while reducing the need for dense fixed sensor networks and enabling frequent, low-cost inspections of civil structures.
Moreover, Tian et al. 8 identify the convergence of multi-modal sensing, autonomy, and learning as key enablers for collaborative SHM at scale, while Li et al. 50 emphasize the integration of multi-robot coordination with inspection-grade analytics and lightweight actuation. Complementing these perspectives, Huang et al. 91 demonstrate that multiple mobile robots can cooperatively map and inspect tunnel environments through distributed control and shared localization, highlighting the resilience and spatial completeness that swarm-like coordination offers in constrained civil infrastructure. Algorithmic innovations in robotic smart SHM lead to the development of more intelligent and autonomous systems. Key algorithmic innovations, such as deep learning, multi-modal sensing, and real-time data processing, significantly enhance the detection capabilities and operational efficiency of robotic SHM systems.92,93 These advancements enable more precise damage detection, real-time assessments, and autonomous operation in complex environments.
As shown in Figure 17, Lv et al. 94 propose a real-time detection model for underwater bridge pier crack detection, using a robotic system that integrates a Poly Kernel Inception (PKI) module and a Context-Aware Anchor Attention (CAA) block with the YOLOv8 backbone. Additionally, the study uses CycleGAN to augment the dataset by converting land-based crack images into underwater counterparts, addressing the problem of limited underwater crack images. This augmentation improves the generalization capability of the detection system, enabling more accurate crack identification across varying underwater conditions. The combined enhancements of the PKI module and CAA block ensure precise detection performance even in complex underwater environments.
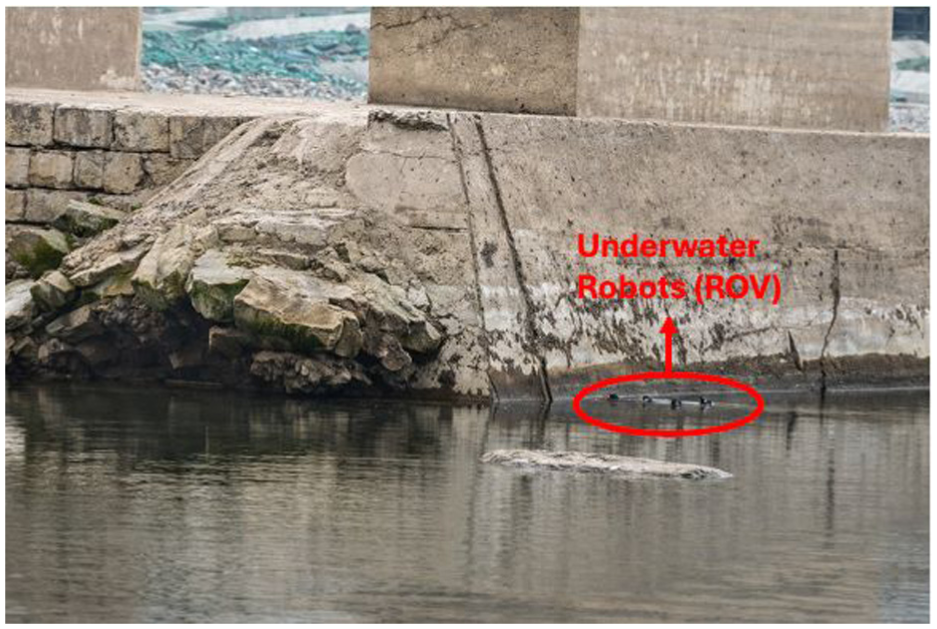
ROVbridge pier image collection. 94
Other relevant studies include Wu et al., 95 who propose a self-localization algorithm for underground pipeline inspection robots that combines velocity data from an IMU and signal strength from relay nodes. This approach enables accurate sensor node localization in GPS-denied environments, improving pipeline inspection efficiency. Xia et al. 92 design a complete-coverage path-planning strategy for the surface inspection of cable-stayed bridge towers using climbing robots, integrating building information models (BIM) to optimize inspection paths. The algorithm solves the challenge of efficient path planning in complex, large-scale environments where manual control is impractical. In addition, Yang et al. 93 create an automated path-planning strategy for robotic underground utility inspections, utilizing the Utility-Chinese Postman Problem (U-CPP) algorithm to create topological maps and ensure full-coverage inspection. Furthermore, Yoo et al. 96 develop a speed compensation method and optimize the uncertainty model to improve localization accuracy for pipeline inspection robots. These innovations address measurement errors caused by odometer slippage and pipe bends, significantly reducing localization uncertainty and enhancing inspection reliability in GPS-denied conditions. Finally, Zhu et al. 97 introduce a real-time localization and tracking system for pipeline robots using fiber-optic sensing. Their algorithm combines signal denoising and feature extraction to monitor the robot’s position, velocity, and status, ensuring robust and efficient inspection operations.
Taken together, the studies reviewed in this chapter show that robotic SHM evolves from manually controlled platforms toward increasingly autonomous inspection agents. Ground, legged, and climbing robots now provide complementary mobility and payload configurations that enable access to components previously difficult or unsafe to inspect. At the same time, advances in sensing integration and algorithmic design—from multi-modal NDT payloads to learning-based defect detection and optimized path planning—significantly improve the efficiency and effectiveness of robotic inspections.
UAVs for structural inspection and monitoring
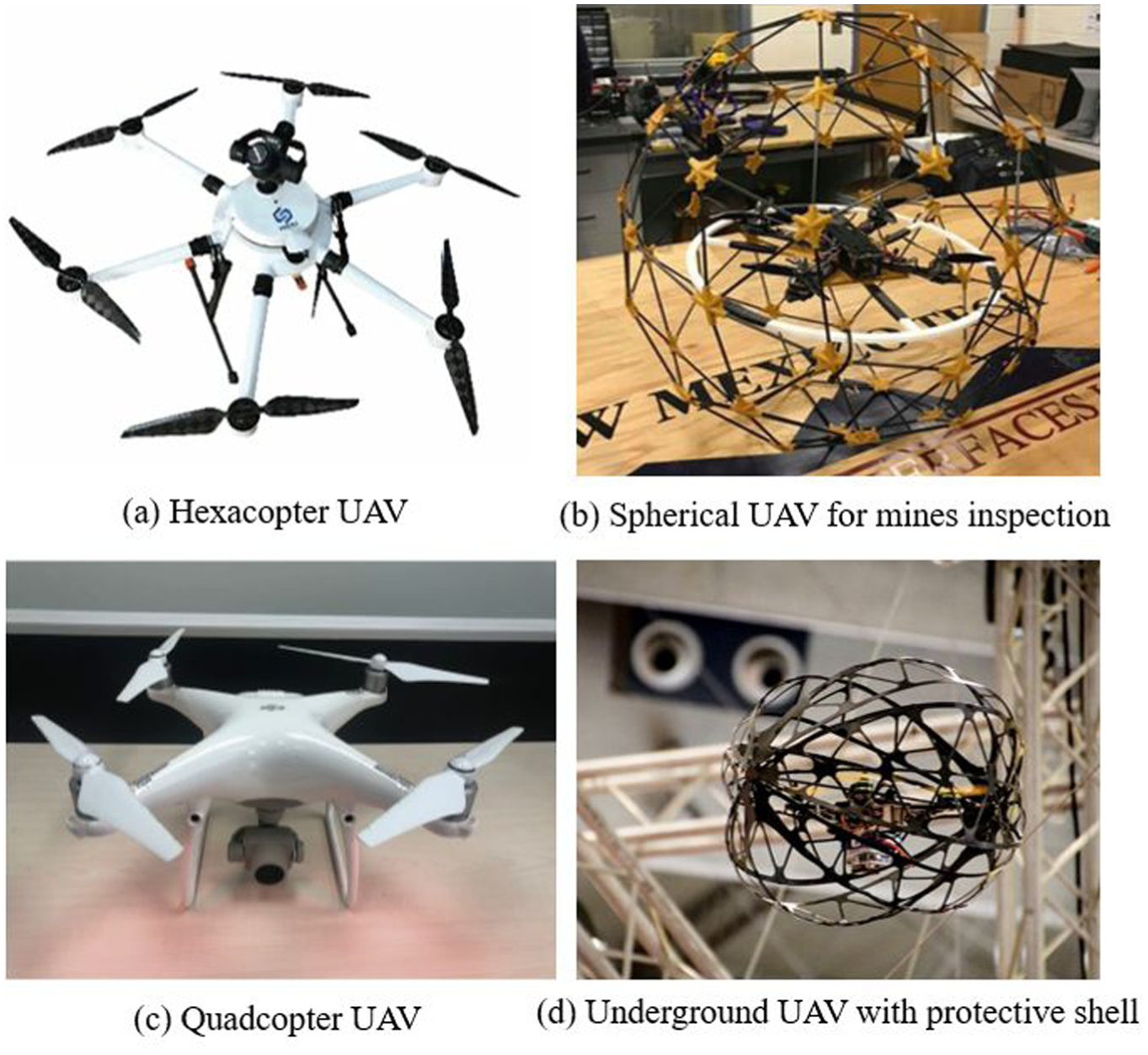
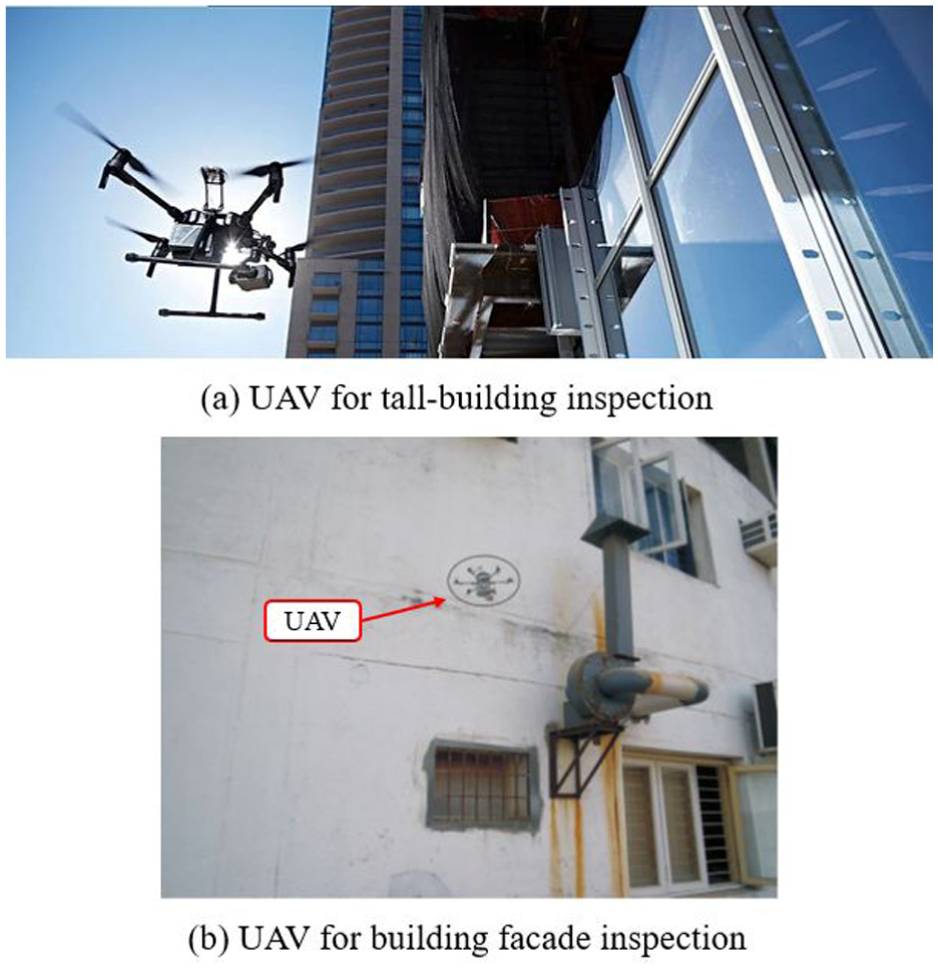
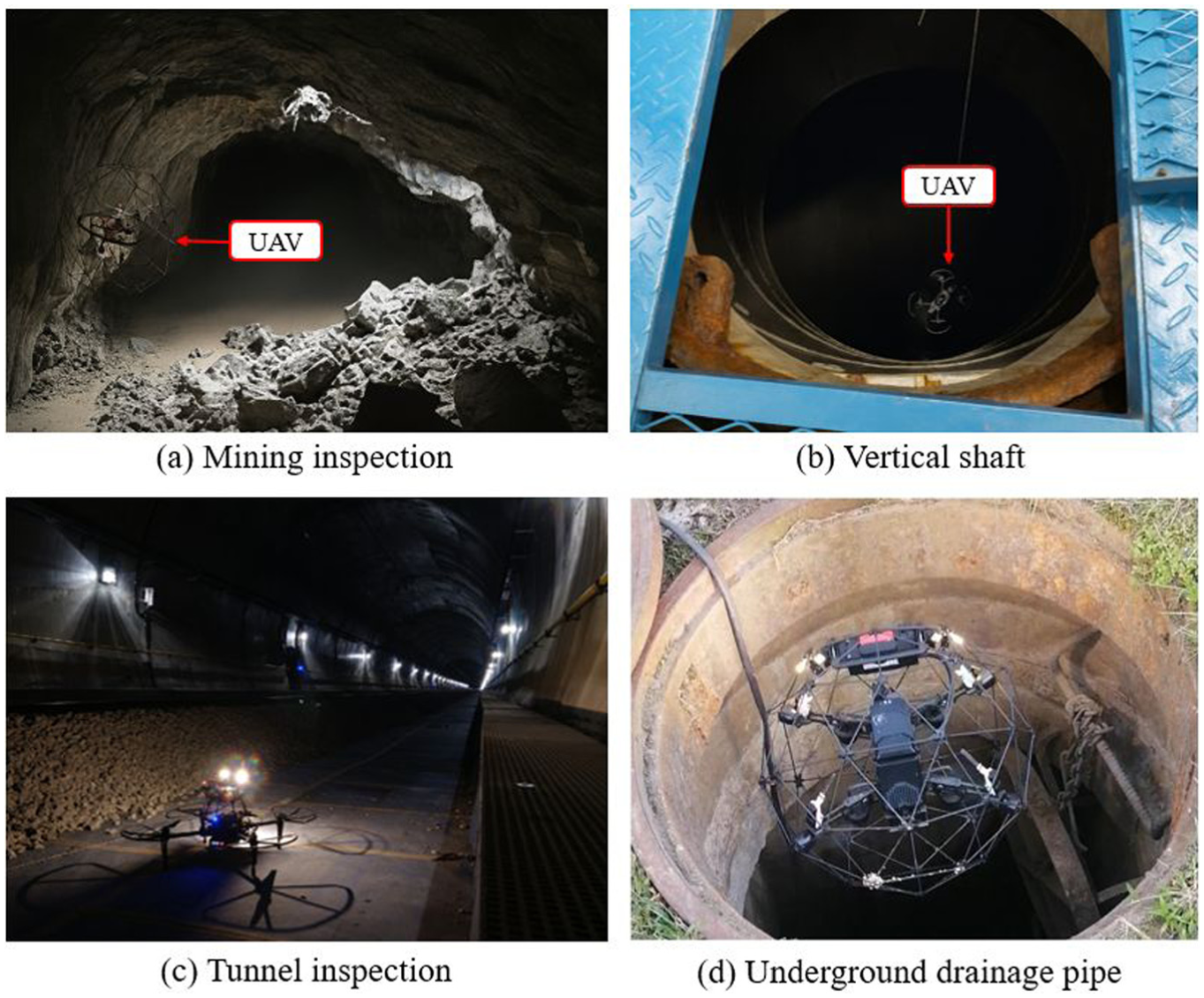
Traditional image-based structural inspections often rely on manual photography and offline analysis, which are labor-intensive, discontinuous, and prone to human bias. 98 Compared with robots, the primary advantage of UAV lies in their ability to fly freely in 3D space and cover large areas efficiently. This wide-area, multi-perspective flight capability fundamentally distinguishes UAV-based inspections from robotic platforms and makes them particularly attractive for bridges, dams, towers, and other spatially extensive infrastructures.98,99 Commonly used outdoor drones have four (Figure 18(c)) or six rotors (Figure 18(a)) and are equipped with cameras or sensors; while drones used underground or in enclosed environments (Figure 18(b) and (d)) often have a spherical protective shield to prevent damage from collisions.
Building on this mobility, UAVs can collect dense visual and geometric data suitable for detailed 3D reconstruction and full-field condition mapping. Through photogrammetry and structure-from-motion techniques, high-resolution RGB (in some cases, thermal or multispectral) imagery is converted into textured 3D models that support both qualitative defect identification and quantitative deformation analysis.16,103 Recent studies further demonstrate that UAVs can be tightly integrated with inspection-oriented imaging workflows, in which flight planning, image acquisition, and preliminary processing are coordinated within a single framework.104,105 However, in most reported applications, the UAV still mainly serves as a flexible data-acquisition platform: images and point clouds are processed on computers, and condition assessment is carried out offline by engineers or external algorithms, indicating that the full potential of onboard and cloud-connected intelligence has yet to be realized.
Relevant papers are collected mainly from the Web of Science database for the period 2015–2025, using a search strategy (“UAV” OR “unmanned aerial vehicle” OR “drone” OR “UAVs”) AND (“structural health monitoring” OR “structure health monitoring” OR SHM OR inspection) for the topic, “structure” OR “infrastructure” OR “concrete” OR “pipeline” OR “tunnel” OR “dam” OR “dike” OR “bridge” OR “building” OR “facade” OR “pipe” OR “utilities” for the title to capture UAV-related SHM applications. The type of paper is restricted to articles only. The initial search yields 119 articles. The following screening criteria are applied to further refine the dataset. First, only one of the duplicate publications describing essentially the same research is retained, such as the two papers written by Kim et al.106,107 Subsequently, studies are retained only if they address UAV systems for SHM or civil infrastructure inspection and demonstrate the application of UAV in practical monitoring scenarios, such as field data acquisition or data post-processing. By contrast, studies focusing solely on UAV system design (e.g., mechanical structure, control algorithms), UAV simulations in virtual environments, or purely theoretical data-processing methods without validation on real-world inspection data are excluded. Taking the paper written by Albeaino et al. 108 as an example, it primarily focuses on the application of VR technology in drone flight instruction, and on evaluating trainees’ assessments of the system instead of the application in SHM, so it is not included in this review. Following this screening process, a total of 114 papers are included in this review. The collected documents are categorized by year and the objects monitored by UAVs, and the categorized results are displayed in Figure 19.
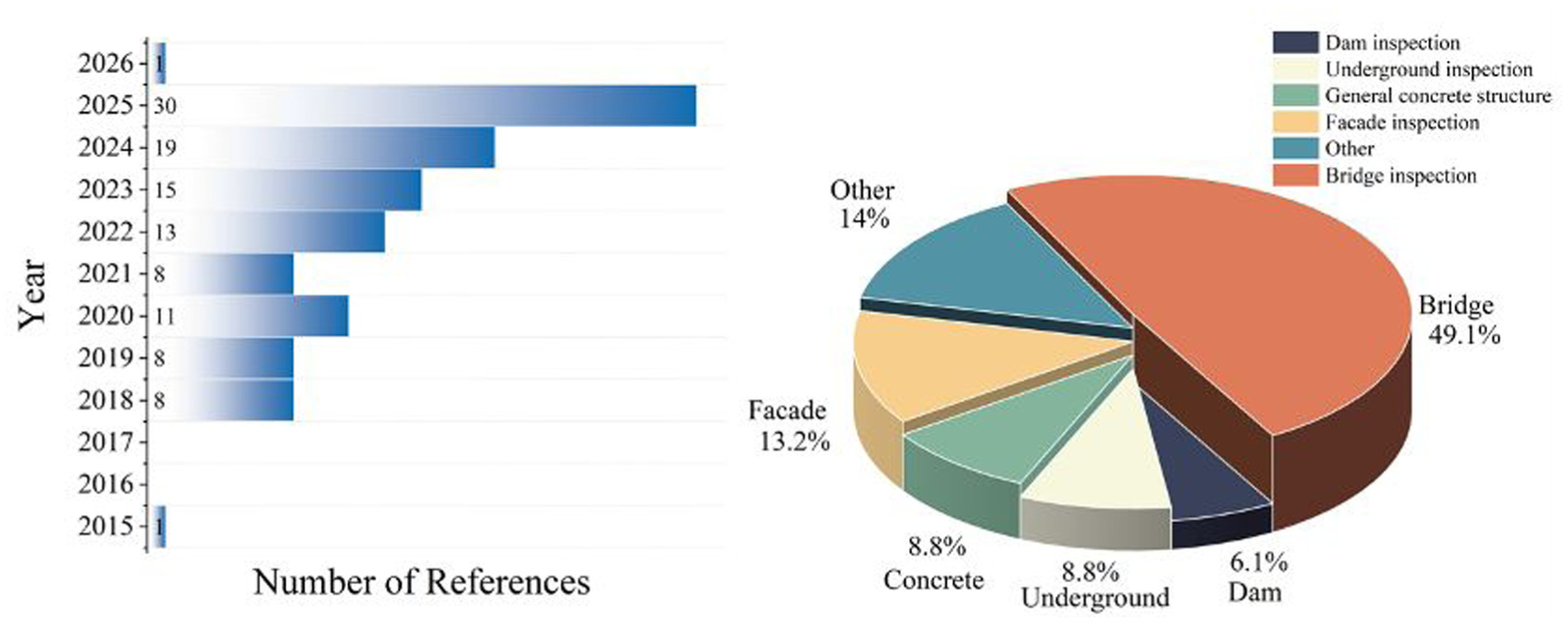
Overview of papers collected for UAV application for smart SHM.
UAVs for above-ground SHM
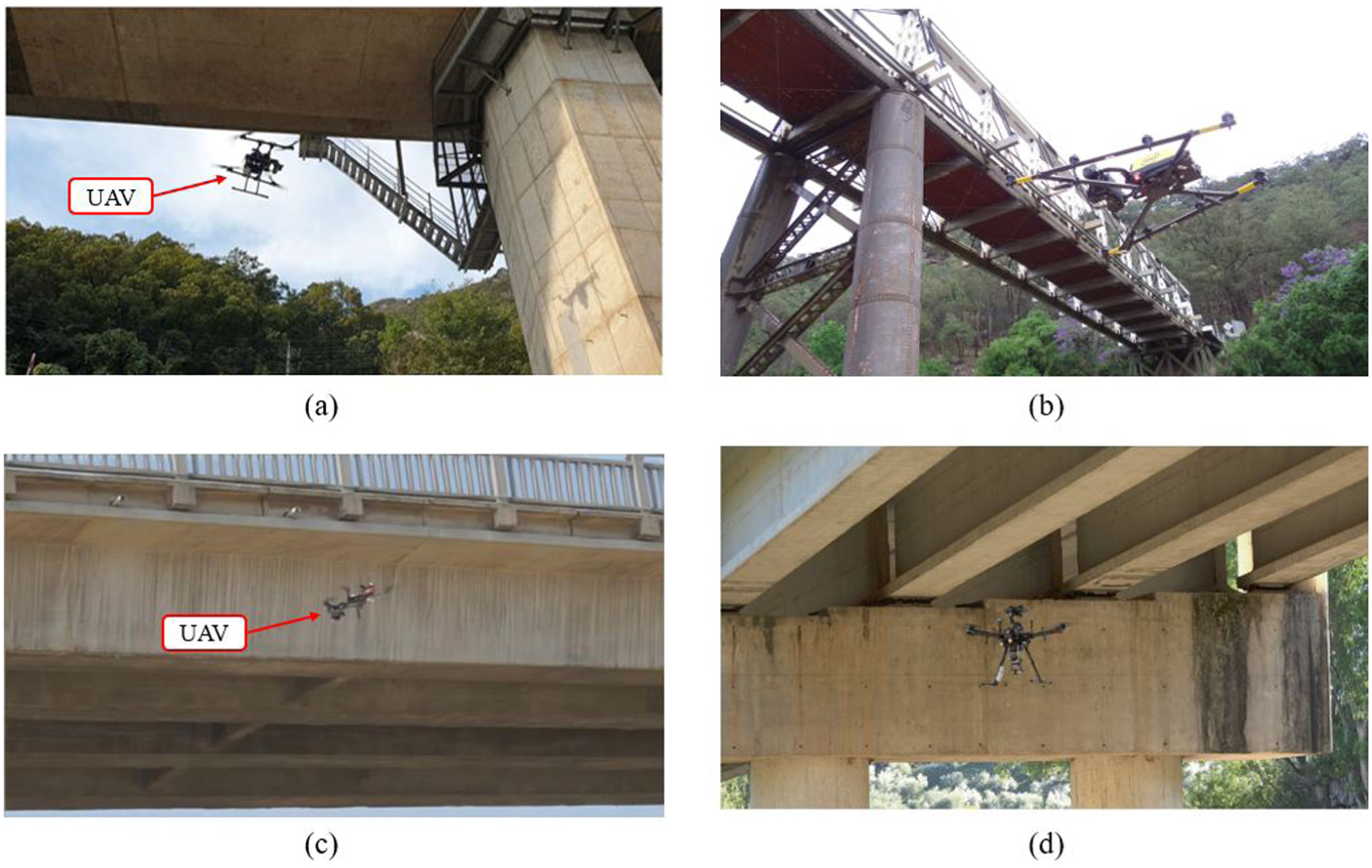
UAV-based inspection has become a core technique for monitoring above-ground civil infrastructure,112–115 providing efficient, non-contact access to large, elevated, or hazardous regions that are otherwise difficult or unsafe for ground, climbing, or manual inspection.116,117 Across bridges, towers, and dams, UAVs equipped with stabilized optical, thermal, and depth-sensing payloads enable the rapid acquisition of high-resolution surface imagery and geometric data, supporting both qualitative defect identification and quantitative structural assessment.59,104,106,118,119 Their three-dimensional mobility allows inspectors to capture multi-angle perspectives around complex structural geometries, reducing occlusion and providing consistent imaging even in confined or cluttered environments (Figure 20).
Recent studies show that this capability moves UAVs beyond simple aerial photography into multi-sensor, geometry-aware inspection systems.120–122 For bridges and large-span structures, UAVs support crack mapping, corrosion assessment, member-level visual inspection, and 3D reconstruction suitable for deformation tracking and emergency evaluation.109,110,123 For high-rise facades and industrial facilities, UAVs provide condition surveys and defect documentation at elevation without scaffolding, rope access, or traffic disruptions.104,118 In hydraulic structures such as dams, UAV photogrammetry and thermal imaging facilitate fast-response inspections, full-field geometry capture, and seepage or moisture detection following extreme events.16,103,124 Taken together, these developments show that UAVs have become practical and scalable tools for routine and event-driven monitoring of critical above-ground infrastructure. Examples of above-ground inspection UAVs are shown in Figure 18(a) and (c).
UAV inspection of bridges and large-span structures
Bridges and other large-span structures constitute some of the earliest and most widely explored application domains for UAV-based SHM because of their complex geometries, exposure to harsh environments, and the practical difficulties associated with manual access to decks, girders, and substructures.125–127 UAVs fly along and beneath decks, around piers and abutments, and up to tall pylons or cable anchorages, acquiring close-range imagery and geometric data without traffic closure or heavy access equipment.128–131 This capability supports both routine condition assessments and rapid post-event inspections, enabling repeatable documentation of surface defects, corrosion, and geometric irregularities over entire bridge lengths.132–136
For instance, Kim et al. 106 conduct a comprehensive comparative study between UAV-based and manpower-based inspection of an in-service highway bridge, illustrating a typical end-to-end UAV workflow for bridge condition assessment. In their setup, a UAV platform with a gimbal-stabilized high-resolution camera flies along pre-planned paths around the bridge, including longitudinal deck-edge passes and transverse passes around piers and girders at different elevations. The UAV maintains a controlled stand-off distance to balance image resolution with safe operation near traffic and structural elements. The captured images are organized into an inspection database and processed through an automated damage-mapping pipeline to identify cracks, spalling, and exposed reinforcement. The results show that UAV-based surveys achieve comparable or superior defect detection while reducing inspector exposure and inspection effort, highlighting the maturity of UAV-based bridge inspection.
As shown in Figure 21, Ikeda et al. 137 propose a practical UAV-based inspection workflow for large steel bridges, emphasizing operational constraints such as wind disturbance and GPS degradation. Their system integrates a UAV with a stabilized optical camera and a real-time video downlink, enabling guided close-proximity flight along complex steel geometries. A structured inspection protocol covering pre-flight planning, waypoint design, and human–UAV coordination ensures consistent coverage and minimizes occlusion around trusses and gusset plates. Field tests show that the workflow reliably captures inspection-grade imagery under realistic environmental conditions, demonstrating that operationally grounded flight planning is as essential as sensing hardware for reliable UAV inspections (Figure 22).
UAV inspection system for bridge SHM. 137
Workflow of the UAV-based structural inspection framework. 104
Other studies further extend UAV-based bridge inspection toward diverse structural configurations and sensing tasks by addressing challenges related to localization, imaging quality, and inspection automation. In complex bridge environments where GNSS (Global Navigation Satellite System) signals are unreliable, Kang and Cha 138 demonstrate autonomous UAV navigation beneath bridge decks using ultrasonic beacon localization, enabling stable close-range imaging in GPS-denied regions. Building on robust positioning and flight stability, high-resolution image acquisition has been widely explored to support quantitative inspection. Jung et al. 109 show that dense UAV photogrammetry enables reliable deformation and damage mapping on curved and geometrically complex bridge structures, while Li et al. 110 further improve crack-width quantification accuracy by integrating a zoom camera with a laser projection module for geometric correction. Similarly, Mandirola et al. 123 verify that dense UAV photogrammetry supports rapid post-event bridge assessment without requiring physical access.
Beyond geometric reconstruction, increasing attention has been paid to standardizing inspection workflows and automating damage interpretation. For instance, Feroz and Abu Dabous 139 and Panigati et al. 29 outline systematic UAV inspection procedures that link platform selection, flight planning, and data processing. In parallel, Raja et al. 114 and Saleem et al. 115 integrate deep-learning-based defect classifiers into UAV imagery to enable automated crack and corrosion detection. To further enhance operational robustness, Seo et al. 116 develop a vision-based UAV deck inspection framework, while Wang et al. 117 design imaging strategies that are resilient to challenging lighting conditions. More recently, Wang et al. 140 introduce a tightly coupled localization–planning–control scheme to achieve drift-free full-coverage inspection, and Wu et al. 119 present a lightweight onboard network that enables real-time defect detection and rust segmentation directly on UAV platforms. Chen et al. 141 further advance bridge inspection toward adaptive closed-loop operation by proposing a multi-level representation learning strategy that combines automatic rough inspection with defect-guided fine detection. Collectively, these studies indicate a clear transition from isolated data acquisition toward reliable, geometry-aware, and increasingly automated UAV-based bridge inspection workflows.
UAVs for high-rise buildings and industrial structures
High-rise buildings, facades, and industrial structures such as cooling towers and chimney stacks pose challenges for traditional inspection due to height, geometry, and safety risks.142–145 UAV-based inspection offers a safe, efficient alternative, enabling close-range visual data collection along vertical surfaces while maintaining appropriate stand-off distances and flight stability.146–148
Firstly, Castiglioni et al. 118 deploy a UAV to inspect reinforced-concrete cooling towers and tall industrial stacks. A stabilized optical camera captures continuous facade imagery along vertical and circumferential paths, enabling engineers to map cracking and deterioration on curved concrete shells. Moreover, Sankarasrinivasan et al. 104 show that UAV facade imaging improves inspection repeatability and reduces personnel risk, even with simple RGB sensing, as shown in Figure 23(b).

As shown in Figure 24, Tan et al. 149 propose a BIM–UAV–edge-computing framework for adaptive high-rise building inspection, in which mixed reality (MR) is employed to construct a digital inspection environment that couples human operators, UAVs, and building models. Their “global–local” method extracts facade regions from BIM to generate inspection points, optimizes UAV flight paths through a hybrid genetic algorithm, and performs real-time crack detection onboard via edge computing, while MR enables human–machine interaction and semi-automatic UAV control within the virtual–real integrated space. A multifunction camera supports both global coverage and local reinspection, and real-time flight replanning adapts imaging locations based on in-situ crack recognition, with field experiments demonstrating notable reductions in inspection time and computational cost while achieving fine-resolution crack documentation.
UAV inspection of building facade based on mixed reality. 149
Recent studies continue to broaden the scope of UAV-based facade inspection by strengthening sensing robustness, BIM integration, and automated defect interpretation. To improve inspection reliability under challenging environmental conditions, Thurnherr et al. 151 employ a multi-sensor UAV capable of operating in turbulent winds while detecting delamination and insulation defects on tall facades. Building on the increasing integration of UAV imaging with digital building models, Huang et al. 112 develop a UAV–BIM registration approach based on an enhanced Generalized Hough Transform, achieving sub-centimeter alignment accuracy. Similarly, BIM-informed flight planning is explored by Tan et al., 152 who enhance facade coverage efficiency through geometry-driven path design, and later by Tan et al. 120 in the context of UAV-assisted quality monitoring using BIM-derived inspection points. Meanwhile, advanced perception methods continue to rise in importance. Tan et al. 121 integrate deep-learning defect detection with UAV photogrammetry for high-resolution facade mapping, and Zhang et al. 122 propose an automated image-to-BIM registration workflow using virtual camera rendering and template matching to efficiently geo-reference large UAV image datasets. Mathur et al. 153 proposed an end-to-end autonomous UAV inspection pipeline for high-rise buildings that integrates collision-aware drone navigation, deep-learning-based facade crack detection, and 3D model construction with 2D-to-3D crack mapping, thereby advancing automated and spatially informed façade assessment. Together, these developments highlight a clear progression toward tightly coupled BIM–UAV workflows and increasingly intelligent facade inspection systems.
UAVs for dams and hydraulic structures
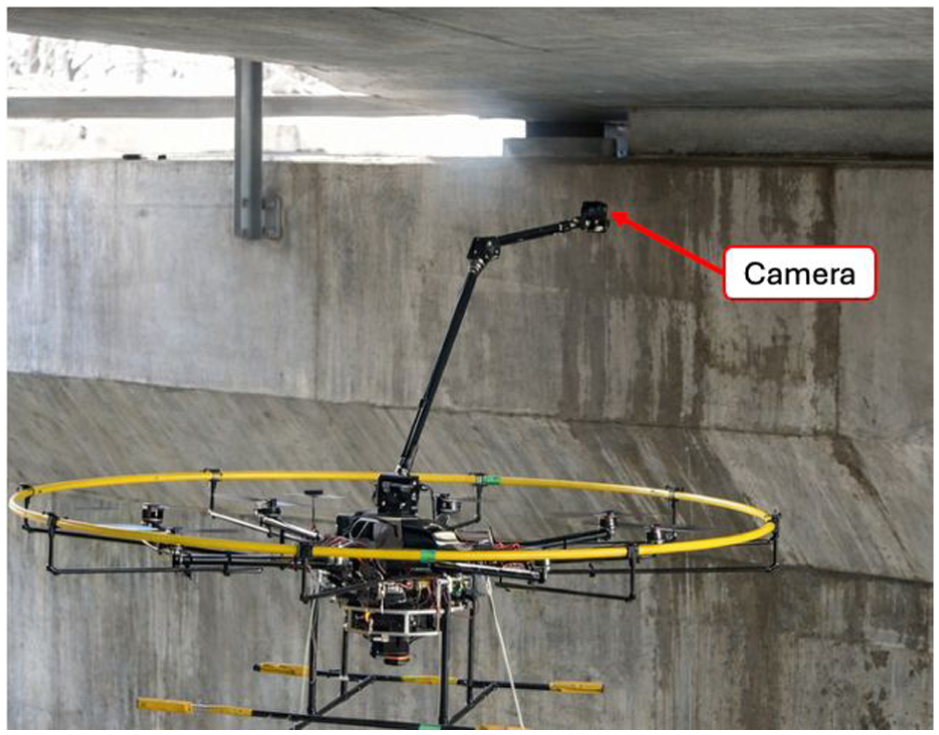
Dams, spillways, and other hydraulic structures require regular monitoring due to their critical role in water management and their exposure to harsh environmental conditions.154,155 An example of UAV application in hydraulic building inspection is shown in Figure 25. Traditional inspection methods often involve manual climbing, boat-based surveys, or the use of long-range cameras, all of which are labor-intensive and dangerous. UAV-based inspection provides a safe and efficient alternative by enabling close-range imaging, comprehensive surface coverage, and rapid deployment during both routine maintenance and emergency scenarios.

UAV inspection for hydraulic buildings. 156
Zhao et al. 16 demonstrates the value of UAV-based photogrammetry for dam inspection under emergency conditions. Using a UAV equipped with a high-resolution RGB camera, the study captures dense overlapping images of the dam surface and applies structure-from-motion (SfM) reconstruction to generate detailed 3D models of the dam body. These models allow engineers to assess deformation, surface deterioration, and geometric irregularities with metric-level accuracy. The results confirm that UAVs maintain safe stand-off distances while still acquiring sufficient detail for reliable surface and geometric assessment.
Beyond geometric monitoring, UAV platforms increasingly extend toward material-condition assessment using complementary sensing modalities. For example, Zhao et al. 124 integrate RGB and thermal imaging to detect cracking, seepage, and moisture-affected zones on small reservoir dams, showing that multimodal UAV sensing improves the visibility of early-stage deterioration. Additionally, Zhao et al. 113 further enhance dam-inspection accuracy by developing a contour-based image-to-BIM registration method that corrects UAV pose deviations and maps defects precisely onto 3D digital dam surfaces, enabling consistent localization across different viewpoints. Khaloo et al. 157 demonstrated that a multi-UAV photogrammetric workflow can support the visual inspection of a large gravity dam by generating high-resolution 3D point clouds capable of capturing overall dam geometry and resolving small-scale surface defects for condition assessment. These studies collectively confirm the applicability of UAVs for precise and comprehensive dam inspection.
UAVs for underground and confined-space SHM
In contrast to open-air inspections of bridges and dams, underground and confined-space environments such as tunnels, sewer networks, and mines impose severe constraints on GNSS reception, lighting, airflow, and collision risk.128,158–160 Some examples of underground inspection UAVs are shown in Figure 26. Conventional UAV platforms designed for outdoor use cannot be directly deployed in these settings due to the high probability of wall impacts, poor visual references, and complex airflow patterns.131–133,148,161 Recent studies therefore adapt UAV systems with protective structures, specialized sensing payloads, and navigation schemes tailored to narrow and GPS-denied spaces.101,158,159,162,163 These underground UAVs extend SHM capabilities to internal linings, excavation faces, and inaccessible cavities, enabling visual and geometric inspection without requiring personnel to enter hazardous zones.
As shown in Figure 26(b), Tan et al. 162 present a representative system for deep sewer tunnel inspection. The system consists of a compact UAV enclosed within a spherical protective cage, allowing safe contact with tunnel boundaries while preventing rotor strikes. A side-looking camera mounted on a rotating mechanism acquires circumferential images as the UAV translates along the pipe axis, effectively producing a continuous line-scan of the tunnel lining. This configuration enables the detection of cracks, joint defects, and infiltration marks without flow interruption or personnel entry. The study highlights the importance of mechanical protection and camera placement in confined-space UAV design, ensuring both operator safety and complete circumferential coverage in long and narrow conduits.
De Assis et al. 165 propose a fully automated UAV-based inspection framework for a cross-passage twin tunnel in the Dublin Port Tunnel, addressing the challenges of complex geometry, variable illumination, and complete GNSS loss. Their system employs a reactive navigation strategy termed Proximity Move–Pause–Photo for Surface Defect Inspection (PMPP–SDI), enabling a DJI Mavic 2 Enterprise Dual to maintain a safe standoff distance, adapt its trajectory to varying tunnel diameters, and acquire high-overlap imagery using an auxiliary spotlight. The captured images are processed through a structured workflow involving filtering, feature stitching, SfM-based 3D reconstruction, digital surface model (DSM) extraction, and orthomosaic generation. Field deployment in a deteriorated cross-passage section shows that the UAV system identifies deformation patterns consistent with long-term monitoring records while offering a cost-efficient alternative to vehicle-mounted LiDAR systems.
Beyond these representative systems, subsequent studies broaden the capabilities of underground UAV inspection by enhancing environmental robustness, geometric reconstruction, and autonomous navigation. For instance, Shahmoradi et al. 101 deploy an encased micro-UAV for mine monitoring, demonstrating that protective hulls substantially improve flight safety in highly cluttered and debris-filled voids. Focusing on excavation environments, Xu et al. 158 design a lightweight UAV equipped with RGB-D sensing and hierarchical planning to reconstruct drill-and-blast tunnel faces, supporting overbreak and underbreak assessment. Similarly, Zhang et al. 159 introduce a reactive “move–pause–photo” imaging strategy for masonry railway tunnels, enabling safer photogrammetric acquisition in narrow and GPS-denied conditions, while Zhang et al. 166 extend this concept to fully automatic inspection of cross-passage twin tunnels through DSM extraction and deformation analysis. In the context of tunnel construction, Dong 163 explores autonomous UAV concepts capable of navigating among moving machinery using multi-sensor perception and robust trajectory planning under GNSS denial. Together, these studies illustrate a clear trend toward more resilient, perception-aware, and autonomous UAV workflows for underground and confined-space SHM.
Algorithmic advances for UAV-based smart SHM
With rapid progress in deep learning, multimodal perception, LLMs, and autonomous control, UAVs are evolving from simple data-acquisition platforms into intelligent agents capable of perception-driven inspection, semantic reasoning, and high-level decision-making.167–171 This subsection reviews algorithmic innovations that enhance UAV-based SHM, including defect detection, 3D reconstruction, semantic scene understanding, coverage planning, autonomous navigation, and AI-assisted inspection.
Beyond the hardware platform, the intelligence of UAV-based smart SHM is increasingly determined by its software and algorithmic stacks.104,172,173 In practice, effective UAV inspection depends not only on sensing system, but also on the embedded algorithmic modules for localization and mapping, multimodal data fusion, defect perception, uncertainty handling, and decision-making.167,168 Recent studies therefore show a clear shift from isolated vision models toward integrated software pipelines in which flight control, scene understanding, and structural assessment are coordinated within a single inspection workflow.169,170 This trend is especially important for smart SHM, because the practical value of UAVs depends less on image acquisition alone than on their ability to transform raw aerial observations into reliable, context-aware, and decision-relevant structural information.
First, Liu et al. 167 introduces a pioneering LLMs-informed multi-agent framework for UAV-based visual inspection of civil infrastructure (Figure 27), representing one of the significant efforts to embed LLMs into the inspection workflow. The system operates through five specialized agents (Router, Path Planner, Controller, Perceptioner, and Retriever) that handle task decomposition, trajectory generation, actuation command synthesis, semantic perception, and knowledge retrieval. A central innovation is the construction of a 3D Scene Graph (3DSG) from multi-view UAV imagery, providing a structured multi-scale semantic representation of infrastructure components to support reasoning and planning. Experiments show that LLM-guided agents autonomously interpret inspection objectives, plan mission sequences, and adapt to complex visual scenes, pointing toward cognitively enabled UAV inspection systems.
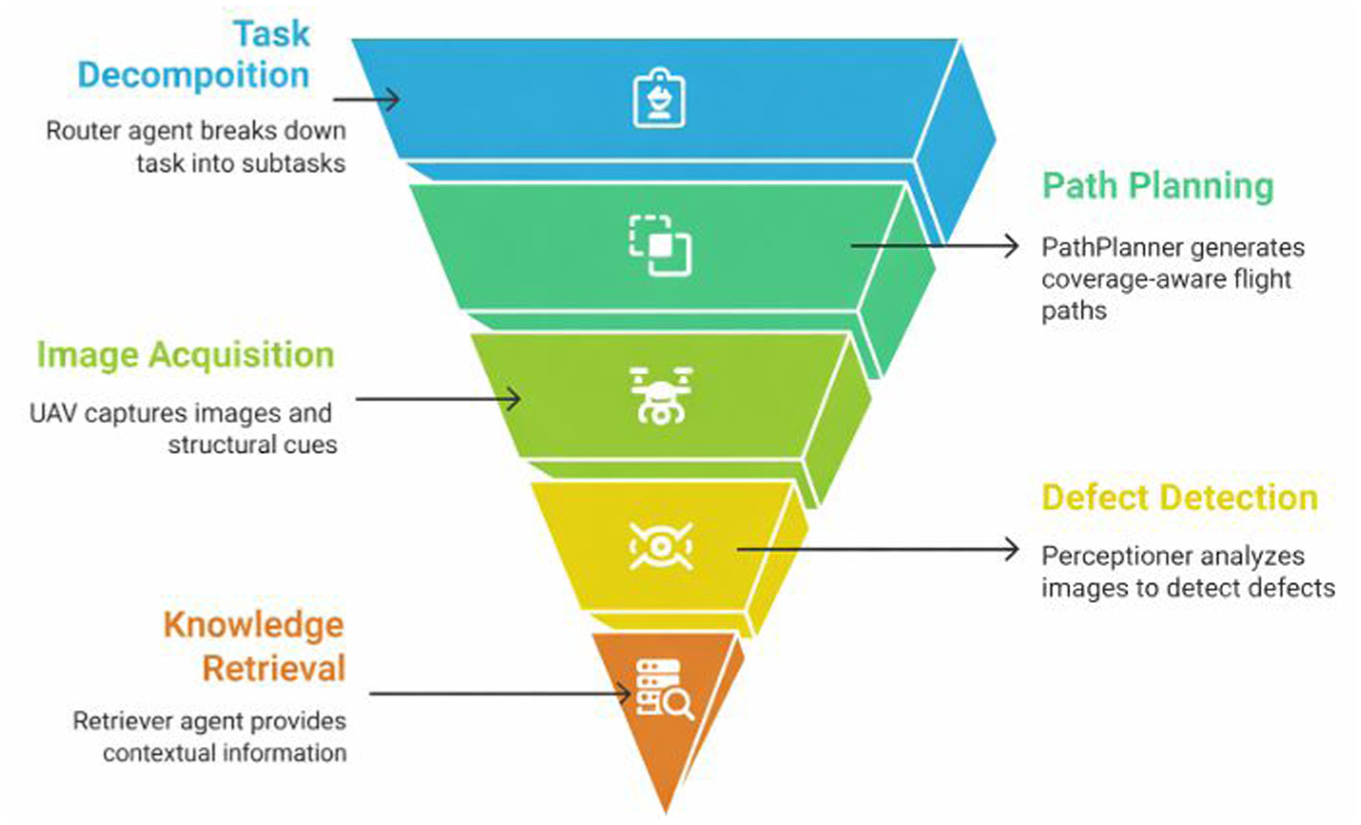
Workflow of the multi-agent framework for UAV-assisted inspection. 167
Recent work has significantly expanded the algorithmic capabilities of UAV-based SHM systems, particularly across three interconnected dimensions: automated damage perception, geometry-aware scene understanding, and intelligent mission planning. In the area of vision-based damage detection and robustness enhancement, Jeong et al. 168 apply a deep CNN to improve crack recognition performance under variable illumination conditions commonly encountered in outdoor inspections, while Lei et al. 174 develop a lightweight, real-time crack detection network tailored for onboard deployment on resource-constrained UAV platforms. Extending beyond single-task perception, Li et al. 169 employ a transformer-based semantic segmentation framework to classify bridge components and refine defect localization, while Saleem et al. 115 introduce a multimodal RGB–thermal fusion strategy to enhance crack detection reliability in visually complex backgrounds. At the scene-reconstruction and global understanding level, Wang et al. 117 develop a multiview stereo reconstruction network optimized for large-scale civil structures, providing dense geometric representations to support subsequent inspection tasks, while Yang et al. 175 further integrate defect detection, dense reconstruction, and global registration into the unified Det–Recon–Reg pipeline for the automated inspection of extensive infrastructures. Finally, increasing attention has been paid to intelligence in UAV navigation and mission execution. Pan et al. 176 propose a voxel-based coverage path-planning method to optimize UAV trajectories around high-rise buildings, Tsai and Wu 170 present an energy-aware trajectory planning strategy aimed at extending UAV operation time, and Raja et al. 114 integrate deep-learning-based corrosion detection directly into UAV video streams to enable real-time, in-situ assessment. Together, these studies indicate a clear shift from isolated algorithmic components toward increasingly integrated, perception-driven, and autonomy-oriented UAV inspection frameworks.
Recent studies also indicate that UAV-based smart SHM is beginning to move beyond manually piloted image acquisition toward more autonomous and operationally scalable inspection workflows. For instance, highly autonomous commercial Unmanned Aircraft System (UAS) platforms such as the Skydio 2+ Enterprise have already been used in bridge-inspection-oriented workflows, where obstacle avoidance, automated image capture, and reduced dependence on manual piloting support more efficient defect-oriented data collection.177,178 Further, emerging dock- or nest-based UAV architecture suggests a possible path toward persistent and remotely managed inspection. Recent studies in power infrastructure inspection have investigated fixed UAV nests (as shown in Figure 28) for takeoff, landing, charging, task dispatch, and communication support, 179 indicating that future smart SHM may increasingly rely not only on autonomous UAV platforms themselves, but also on supporting operational infrastructures that enable repeatable and scalable deployment.

UAV nest for automatic control. 179
Overall, this section shows that UAVs have evolved from ad-hoc imaging tools into versatile inspection platforms that can operate across a wide spectrum of above-ground and underground civil infrastructure. By combining 3D mobility with photogrammetry, thermal sensing, and increasingly sophisticated learning-based algorithms, UAVs now support high-resolution defect detection, geometry-aware condition mapping, and perception-driven navigation. At the same time, their operational limitations in terms of endurance, GNSS denial, wind sensitivity, regulatory constraints, and still modest onboard intelligence indicate that most systems continue to function primarily as mobile data-acquisition interfaces rather than fully autonomous diagnostic agents. In this sense, UAVs are best viewed as a component within broader smart SHM ecosystems, complementing ground, climbing, and legged robots and relying on edge/cloud analytics for comprehensive structural assessment.
Discussion and future perspectives
Over the past decade, SHM has evolved from isolated sensing prototypes to increasingly integrated, data-driven, and intelligent systems. Robotic and UAV systems primarily extend spatial accessibility and enable flexible, repeatable data acquisition, whereas wireless and edge-intelligent sensing infrastructures provide the backbone for long-term, distributed monitoring and in-situ analytics. A holistic understanding of how these sensing architectures interact and where their current limitations lie is essential for defining the next generation of smart SHM research and applications.
Technical advantages and limitations of current robots and UAVs for SHM
Current robotic and UAV systems exhibit a range of technical strengths that significantly enhance structural accessibility, spatial coverage, and measurement repeatability in SHM. Ground and legged robots provide stable, high-fidelity 3D mapping and vibration measurement on accessible surfaces, while climbing robots extend sensing capabilities to vertical, overhead, or submerged domains through magnetic, suction, or propeller-assisted adhesion. Collaborative robotic networks further enable multi-angle, multi-agent inspection with improved spatial completeness. UAVs, in contrast, offer specialized aerial mobility, allowing rapid, multi-perspective coverage of bridges, towers, dams, tunnels, and facades. Both robots and UAVs support dense photogrammetry, thermal imaging, and wide-area inspection, making them effective platforms for large-scale projects. Collectively, these systems expand the spatial and functional envelope of SHM beyond what fixed sensors or manual inspections can offer.
Table 1 summarizes the representative advantages and limitations of each platform type under its typical operating context. The table highlights the dominant environment, payload, and mission-dependent constraints reported in the literature, so that the strengths and limitations of each platform can be interpreted within its intended inspection scenario, which normalizes each inspection method to make them comparable. Ground and legged robots remain sensitive to terrain irregularities, require strict motion planning, and are energy-intensive for long-duration missions. Climbing robots face adhesion reliability issues, payload restrictions, and safety concerns during operation on rough or wet surfaces. In addition, UAVs, although spatially versatile, are limited by short flight endurance, wind sensitivity, GNSS-denied environments, and regulatory restrictions on beyond-visual-line-of-sight (BVLOS) operations. Across all platforms, onboard intelligence remains limited: most systems function primarily as imaging or data-acquisition tools, with core diagnostic reasoning still executed offline. These constraints highlight the need for advances in autonomy, multi-modal sensing, energy efficiency, and integrated analytics to fully realize the potential of mobile SHM platform.
Technical advantages and limitations of current robotic and UAV systems for SHM.
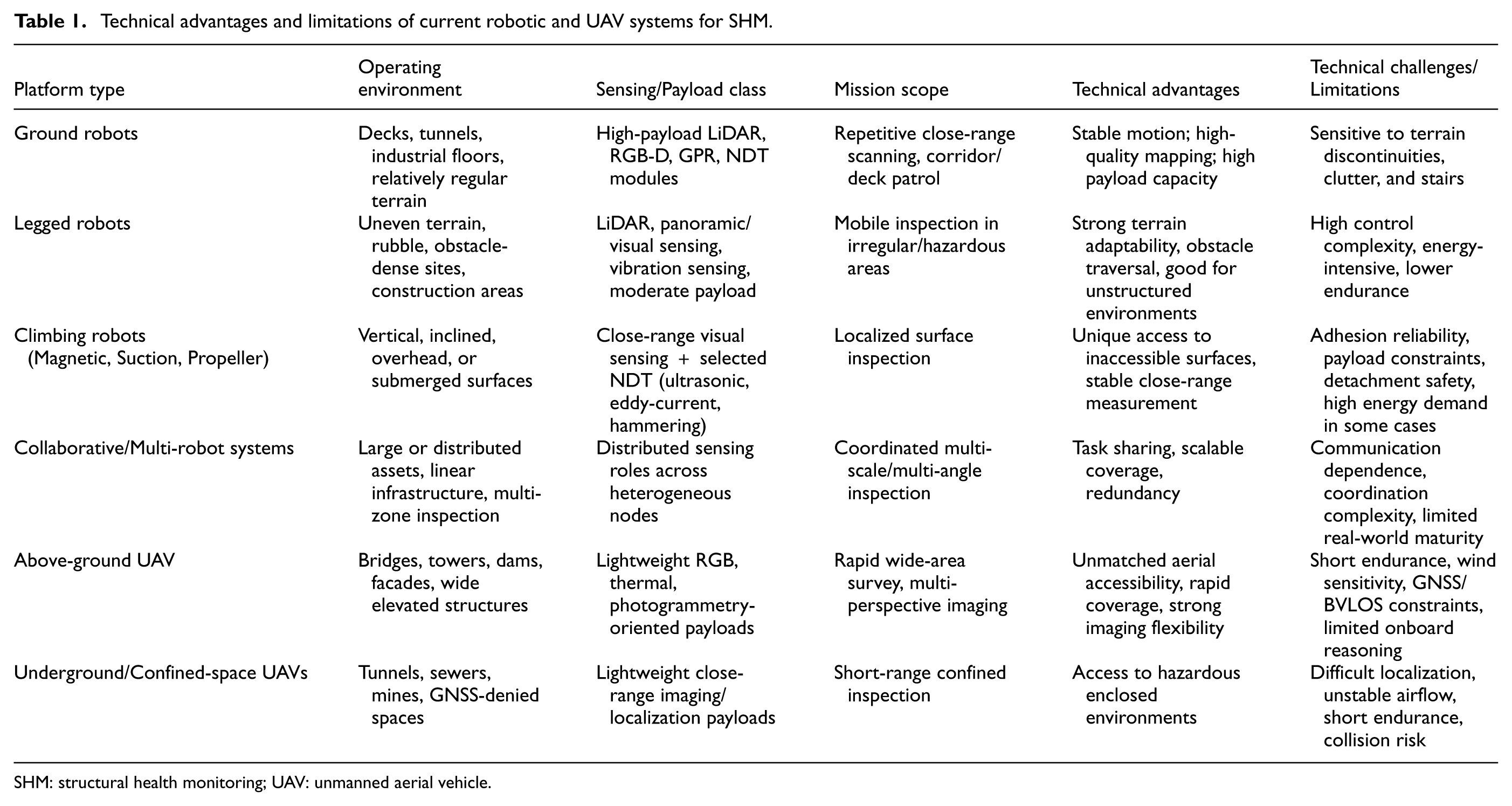
SHM: structural health monitoring; UAV: unmanned aerial vehicle.
Current roles of robots and UAVs in smart SHM
Despite impressive progress in locomotion, sensing integration, and perception algorithms, most robotic and UAV platforms for SHM are still deployed primarily as sensor carriers rather than as fully autonomous monitoring systems. Specifically, robots typically collect visual images, point clouds, or a limited set of NDT measurements and then transmit this data to an off-site workstation for post-processing and structural assessment.37,80,84 Similarly, many UAV-based inspection campaigns are organized as surveys in which high-resolution imagery or photogrammetric models are acquired in the field and interpreted later by engineers or offline machine-learning pipelines.104,106,118,123 In these cases, robots and UAVs primarily extend human reach and improve safety and coverage; however, the core reasoning about damage extent, severity, and structural implications still resides outside the mobile platform.
A second observation is that the sensing methods currently exploited on robotic and UAV platforms remain heavily skewed toward vision-based measurements. The majority of reported systems mount RGB cameras (sometimes augmented with thermal imaging) to detect surface anomalies such as cracks, corrosion, and leakage.8,50,139 Multi-modal payloads, combining, for example, eddy-current, ultrasonic, hammering, or ground-penetrating radar with visual sensing, are still comparatively rare and often restricted to laboratory prototypes or small-scale field tests.37,79,80 This predominance of image-based inspection limits the ability of robotic SHM systems to capture subsurface damage, internal stress redistribution, and long-term deformation; it also constrains their integration with physics-based models that require richer mechanical observables such as strain, displacement, or modal parameters.
Third, the level of onboard autonomy and intelligence on mobile platforms varies widely and, in many cases, remains very low. A substantial proportion of robots and UAVs operate in tele-operated or waypoint-following modes and perform only basic local functions such as low-level motion control, obstacle avoidance, and data logging.8,139 Only a smaller subset implements more advanced onboard capabilities, such as autonomous navigation in complex environments,39,75 local modal-parameter extraction on legged robots, 56 or embedded defect detection on climbing robots and UAVs.79,124 Even in these more advanced examples, the final steps of structural state evaluation, such as condition rating, reliability assessment, or remaining-life prediction, are typically executed on ground servers or offline, reflecting a clear gap between autonomous data acquisition and autonomous diagnosis.
From an application standpoint, robotic and UAV-based SHM is predominantly reported in the form of research prototypes or pilot case studies on single bridges, buildings, or dam faces, often under controlled conditions and with limited environmental variability; robustness to adverse weather, illumination changes, or unstructured construction-site conditions are only occasionally addressed.98,139,180 Climbing robots still face practical concerns regarding adhesion safety and fail-safe recovery from detachment,37,84 while UAVs remain constrained by short endurance, wind sensitivity, and regulatory limits on BVLOS operations. 98
Taken together, these observations suggest that the current role of robots and UAVs in SHM is predominantly that of an advanced mobile sensing interface. They have substantially improved how and where data can be collected, but their contribution to complete in-situ reasoning and decision-making remains limited. Bridging this gap, from “sensor carrier” to genuinely edge-intelligent diagnostic agents, is a central theme in the future evolution of smart SHM.
Edge-intelligence development in robots and UAVs for SHM
The concept of edge intelligence in SHM refers to embedding data processing, feature extraction, and preliminary decision-making directly on or near the sensing platform, rather than relying solely on remote servers. In the broader SHM literature, edge and fog computing have been successfully applied to fixed sensors and cameras: for example, Cui et al. 181 deployed lightweight deep-learning models and statistical inference on wireless sensor nodes to perform local modal-feature extraction and anomaly detection, while Peng et al. 182 executed crack detection and displacement estimation on embedded GPU-based processors attached to civil structures, achieving millisecond-level latency. Martín et al. 183 further demonstrated an Edge/Fog/Cloud architecture in which edge devices handle preliminary feature extraction, fog nodes perform data fusion and quality assessment, and the cloud manages long-term analytics and visualization. These studies collectively illustrate the potential of edge intelligence to reduce bandwidth demands, shorten response times, and enable distributed, context-aware SHM.
When one turns to mobile platforms, however, the level of edge intelligence realized on robots and UAVs remains relatively modest. For example, among the 65 robotic smart SHM papers, only seven studies (10.8%) provide clear evidence of onboard processing, among which five are for onboard SLAM/localization,46,47,52,54,66 and two for tightly coupled sensing–control routines.67,78 The proportion is even lower in the UAV literature; only two of the 114 reviewed UAV papers (1.8%) explicitly demonstrate onboard processing.119,149 A limited number of studies have demonstrated the feasibility of performing on-platform analytics (as demonstrated in Table 2). Despite these advances, onboard intelligence is still largely confined to feature-level processing, while higher-level structural condition assessment and decision-making are predominantly executed off-board.
Examples of onboard intelligence of robots and UAV for SHM.
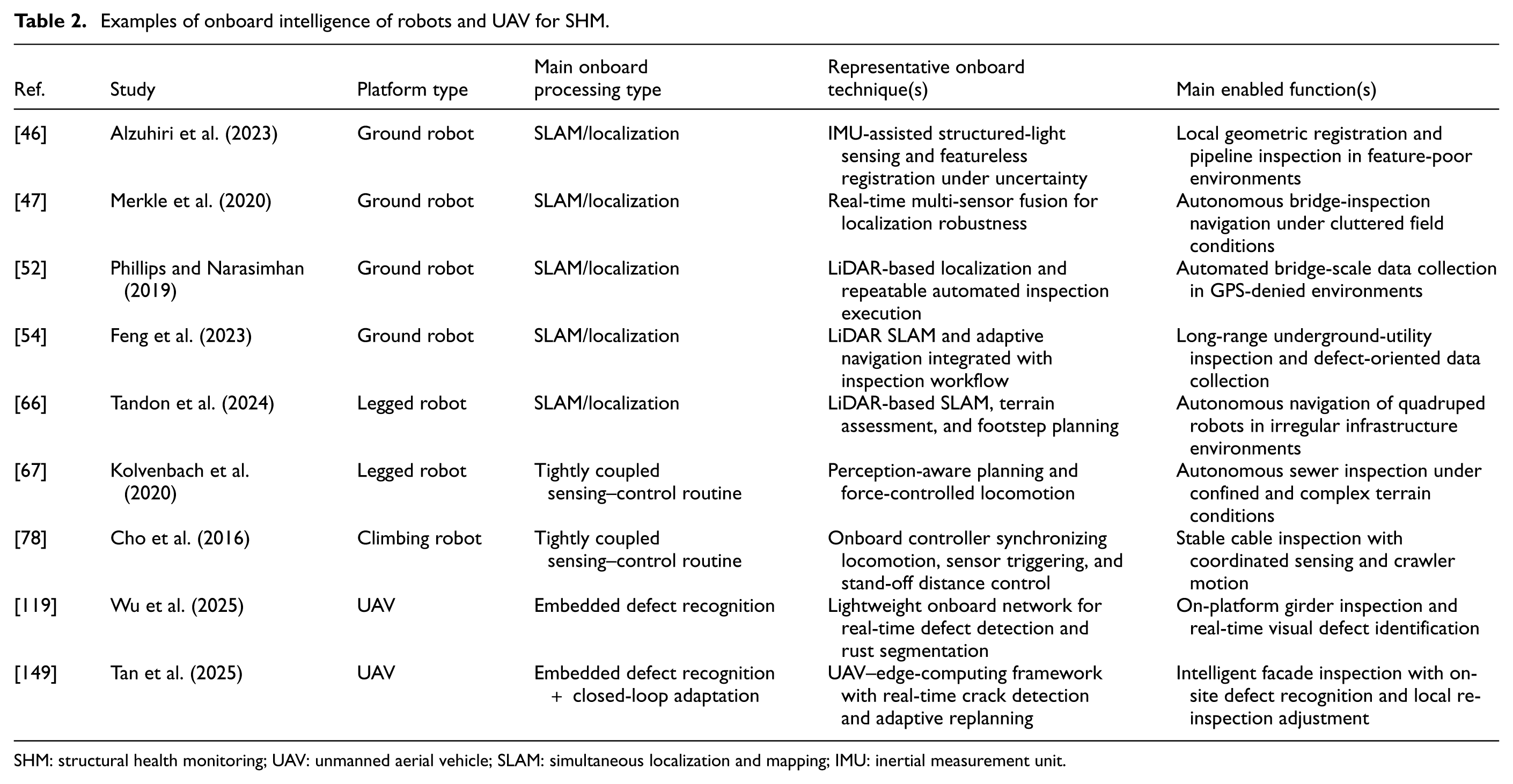
SHM: structural health monitoring; UAV: unmanned aerial vehicle; SLAM: simultaneous localization and mapping; IMU: inertial measurement unit.
Several technical and practical factors explain why edge intelligence on robots and UAVs remains at an early stage. First, onboard computation and energy resources are constrained, especially for small UAVs and wall-climbing robots, making it challenging to deploy complex deep-learning models or high-rate signal-processing pipelines without compromising endurance. Second, there is a lack of standardized software architectures for integrating navigation, perception, and structural analytics on a single platform; many prototypes rely on custom code tailored to specific experiments, which hinders reuse and large-scale deployment.8,50 Third, most existing edge-intelligent SHM frameworks have been developed for static sensor networks or fixed cameras,181,182 and their direct transfer to mobile platforms requires careful co-design of flight/locomotion control, perception, and computational load.
From a research perspective, advancing edge intelligence in robotic and UAV-based SHM will require: (i) hardware–algorithm co-design to match model complexity with onboard computing and power budgets; (ii) robust, real-time integration of SLAM, path planning, and defect recognition so that robots can adaptively adjust their trajectories based on perceived structural conditions; and (iii) standardized interfaces for fusing edge-level decisions with higher-level digital-twin or asset-management platforms.183,184 Only when mobile platforms can autonomously decide where to inspect, what to measure, and how to summarize their observations, will they fully transition from being merely sensor carriers to becoming genuinely intelligent, field-deployable agents within smart SHM ecosystems.
LLMs also represent an emerging direction for extending edge intelligence in smart SHM beyond conventional perception pipelines. While their application to robotic- and UAV-based SHM is still at an early stage, recent studies suggest that LLMs may contribute in at least two complementary ways. First, they can support the semantic structuring and interpretation of heterogeneous inspection information. For example, Svennberg and Ekman showed that a large language model can transform semi-structured building inspection reports into structured categories for maintenance prediction, indicating the potential of LLMs to bridge the gap between raw inspection records and decision-oriented asset information. 185 Second, LLMs may enable higher-level coordination in intelligent inspection systems. Cui et al. introduced an LLM-driven multi-agent UAV framework in which language-model-based reasoning was integrated with path planning, task allocation, and defect identification, suggesting a possible route toward more adaptive and collaborative mobile inspection workflows. 186 Although such studies remain preliminary, and issues of robustness, hallucination control, computational cost, and domain grounding must still be addressed, they indicate that future smart SHM systems may benefit from combining lightweight perception models with LLM-based semantic reasoning, reporting, and mission-level coordination.
Challenges and future research directions
Synthesizing the preceding discussions on robotic and UAV systems, the remaining bottlenecks of smart SHM can be consolidated into a few tightly coupled technical challenges. Across both robots and UAVs, the central issue is that most field-deployable systems still function predominantly as mobile data-acquisition interfaces, while autonomy, multi-modal sensing, and diagnostic reasoning are only partially realized on board.8,50,106,123
A first challenge is the still limited multi-modal perception capability of mobile inspection platforms. The reviewed robotic literature remains strongly dominated by vision-based sensing, especially camera inspection. Among the 65 robotic papers retained in the final review, only seven studies (11%) explicitly integrate camera-/vision-based sensing with at least one additional non-visual modality.44,45,49,54,65,81,82 These results confirm that compact multi-modal perception remains uncommon in current robotic smart SHM systems. Among the 114 reviewed UAV papers, 55 studies are explicitly centered on image-, vision-, photogrammetry-, or deep-learning-based visual workflows, whereas only five papers (5%) involve other sensing types, such as thermal/infrared, LiDAR, radar, et al., in addition to vision.151,155,170,187,188 This sensing imbalance restricts the detection of subsurface deterioration and weakens the linkage between observed defects and mechanics-informed indicators. Future work should prioritize platform-compatible, modular multi-modal payloads and calibration–fusion pipelines that can reconcile visual cues with material and geometric measurements under real flight/locomotion constraints, enabling richer and more interpretable condition inference.
A second challenge concerns the modest level of edge intelligence and closed-loop autonomy achieved on mobile systems. Although early studies have demonstrated embedded defect recognition, local spectral processing, and adaptive inspection workflows on robots and UAVs,56,79,124 most systems still execute high-level diagnosis, condition rating, and mission adaptation off-board.8,106 This gap is amplified by constrained onboard computation and energy budgets. Future research could pursue hardware–algorithm co-design and lightweight yet robust models that unify localization, coverage planning, perception, and preliminary condition reasoning into an energy-aware onboard loop, so that mobile agents can autonomously decide where to inspect, what to measure, and when to trigger local re-inspection.
A third challenge is the insufficient operationalization of heterogeneous and multi-robot cooperation. The reviewed evidence suggests clear capability complementarity: ground and climbing robots can carry heavier contact or near-contact non-destructive testing modules and perform stable close-range measurements, whereas UAVs excel at rapid multi-perspective coverage of elevated or spatially extensive assets.8,50 However, these advantages are rarely integrated into unified mission-planning and data-fusion frameworks, and deployments of coordinated teams remain limited. Future studies should develop cooperative architectures that not only synchronize localization and sensing roles but also utilize the collective intelligence of the swarm. Specifically, the limited onboard computational capacity of individual robots can be exploited through decentralized task distribution, enabling the network to achieve higher processing efficiency than any single node. Complementarily, enhancing the networking capabilities of these mobile systems would allow for the transmission of intensive computational tasks to indoor computing systems. Such an approach would facilitate real-time analysis of sensor data and establish an effective feedback mechanism, enabling dynamic mission adjustments for the scalable and intelligent inspection of complex infrastructure.
A fourth challenge lies in closing the loop between field robotics/UAV sensing and digital-twin or asset-management ecosystems. While photogrammetric models, LiDAR maps, and BIM-registered defect layers are increasingly reported,16,39,112 heterogeneous data formats and inconsistent semantics still hinder continuous model updating and standardized condition assessment.182,183 Future research should define shared SHM ontologies and cross-platform data schemas and advance real-time assimilation of multi-source observations into digital twins that can both interpret inspection outcomes and generate risk-informed, prioritized inspection tasks for mobile agents.
Beyond these research-oriented challenges, the practical implementation of smart SHM also requires greater attention to deployment readiness in real engineering settings. Future technology development should not only improve sensing, autonomy, and data fusion, but also address issues that determine whether robotic and UAV systems can be routinely adopted in infrastructure management workflows. These include robustness under variable weather, lighting, dust, moisture, and GNSS-denied conditions; fail-safe operation for adhesion loss, collision avoidance, and communication interruption; standardized inspection protocols for repeatable data quality; and closer integration with maintenance decision chains used by infrastructure owners and operators. In practice, mobile SHM platforms will be more useful if they can deliver inspection results in formats that can be directly used for condition assessment, maintenance prioritization, and life-cycle asset management, rather than functioning only as simple data-collection tools. Therefore, future work should place stronger priority on field validation, workflow compatibility, and operator-oriented system design to support the real-world implementation of smart SHM.
These aligned challenges and associated research directions are summarized in Table 3.
Key challenges and future research directions for smart SHM.
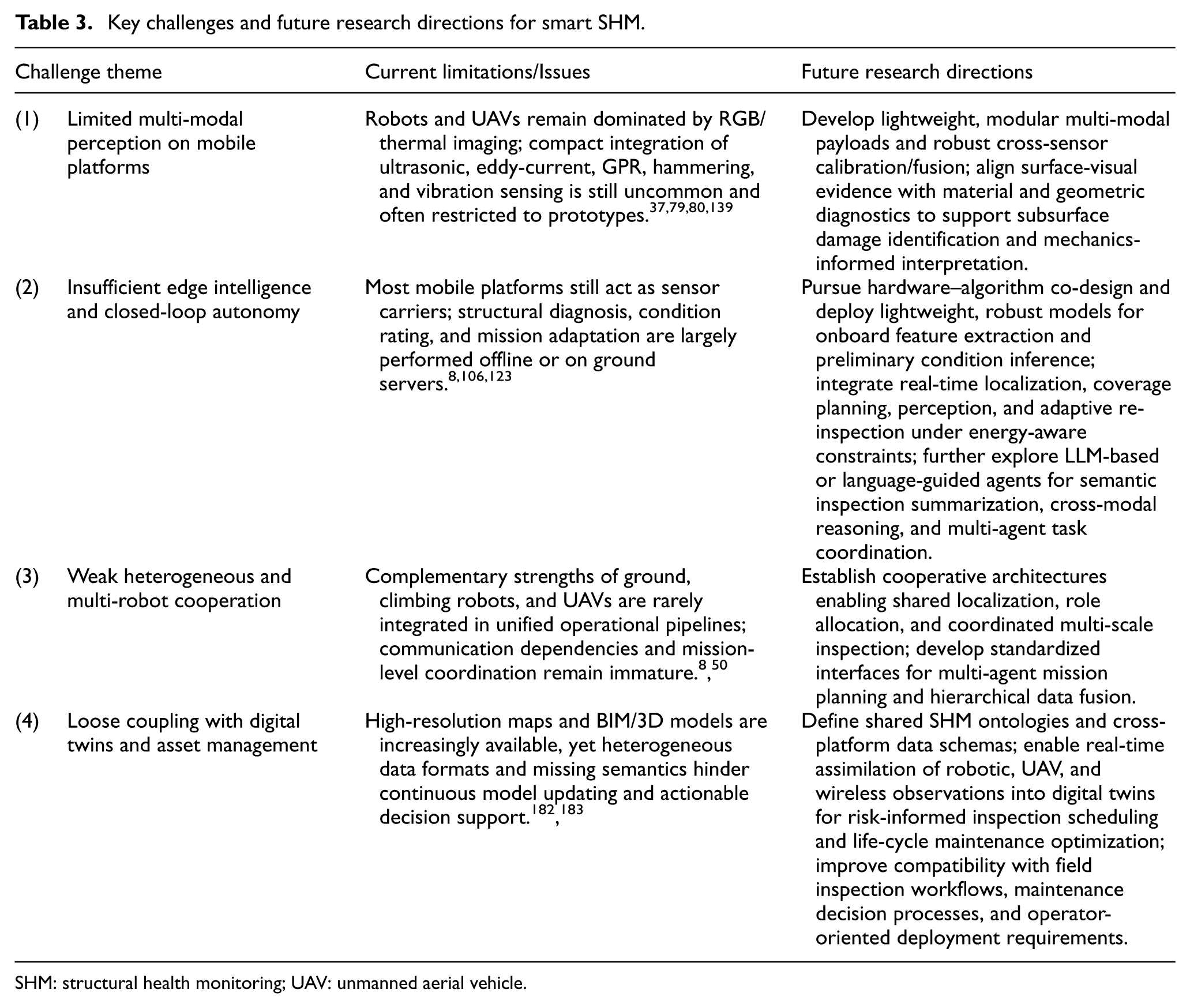
SHM: structural health monitoring; UAV: unmanned aerial vehicle.
Overall, these challenges indicate that smart SHM is advancing toward integrated, multi-agent diagnostic ecosystems. Progress will depend on coordinated advances in multi-modal sensing, energy-aware edge intelligence, heterogeneous cooperation, and digital-twin-centered decision loops, so that robots and UAVs can evolve from mobile sensing interfaces into field-deployable, edge-intelligent inspection agents.
Conclusion
This study synthesizes recent advances in robot- and UAV-based inspection across diverse infrastructure types, including bridges, buildings, dams, and underground spaces, examining their mobility characteristics, sensing configurations, and application scenarios. Key technical advantages and persistent limitations of current robotic and UAV platforms are identified, and the study further outlines future research directions toward intelligent, cooperative, and scalable mobile SHM systems for resilient infrastructure management.
Robotic inspection platforms have become an important component of emerging smart SHM practices. Across ground, legged, climbing, and multi-robot systems, these platforms provide stable data acquisition, close-range access, and improved repeatability in complex inspection environments. Their mobility and payload capacity enable high-quality mapping of decks, tunnels, vertical surfaces, and complex industrial facilities, supporting automated and standardized inspection workflows. Despite differences in locomotion and sensing configurations, current robotic systems consistently demonstrate their value in environments where precision, stability, and human–robot collaboration are essential.
UAV-based SHM has developed rapidly due to unmatched aerial mobility and wide-area coverage. Recent studies show that UAVs are now widely used for bridges, facades, dams, and underground spaces, enabling photogrammetry, thermal imaging, and algorithm-assisted defect detection across diverse structural geometries. These capabilities make UAVs particularly suitable for the rapid inspection of large, elevated, or hazardous regions. However, practical use remains constrained by endurance limitations, environmental sensitivity, signal-denied conditions, and the predominance of offline processing.
Across both robotic and UAV systems, several overarching challenges block broader deployment, including limited onboard intelligence, incomplete integration of multi-modal sensing, operational and energy constraints, and the absence of unified inspection frameworks. Fulfilling these gaps will require advances in perception-driven autonomy, cooperative inspection among heterogeneous mobile platforms, and alignment with digital-twin-based assessment workflows. As these technologies mature, mobile inspection systems are expected to transition from data-collection tools to intelligent, scalable, and field-ready SHM solutions capable of supporting resilient infrastructure management.
Footnotes
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
The authors confirm that the data supporting the findings of this study are available within the article.