
Abstract
Aging civil infrastructure presents growing risks to public safety and structural resilience. Although structural health monitoring (SHM) has proven highly effective in monitoring and assessing critical assets, its broader implementation is hindered by upfront costs and the practical difficulties of deploying dedicated monitoring systems. Meanwhile, today’s cities generate massive, continuous data streams from connected vehicles, mobile devices, satellites, surveillance cameras, fiber-optic cables, and many other systems, originally designed for purposes like transportation, utilities, and security. A growing body of research shows that such urban data sources can be repurposed to infer structural health conditions across infrastructure networks more practically, while also supporting the objectives of the Smart & Connected Communities and Infrastructure Systems and People paradigms. Despite increasing interest, this field has lacked a unifying identity and systematic structure. Thus, this article attempts to formalize this domain of repurposing existing sensing mechanisms for infrastructure health monitoring under the term Latent Infrastructure Sensing (LIS). “Latent” emphasizes that valuable structural health information is already embedded in everyday urban data flow but remains largely concealed/underutilized/unexplored. In this article, we define the conceptual boundaries of LIS, propose a general evaluation criterion grounded in Reliability, Effectiveness, Actionability, and Practicality, and introduce the LIS Intelligence Framework that traces raw latent data through processing stages to decision-ready insights. We further synthesize existing LIS research into distinct categories (with representative studies), including crowdsensing via vehicles and mobile devices, satellite interferometry, stationary camera analytics, and emerging infrastructure sensing using fiber-optic cables, while highlighting key methodological gaps as well as socio-technical and governance challenges. We also identify promising future opportunities, such as sensing enabled by delivery robots, electric vehicle charging roads, and smart home devices. Hence, this article lays the foundation for scalable, practical, and potentially cost-effective infrastructure health monitoring that leverages data already coursing through contemporary cities.
Keywords
Introduction
Over the past several decades, aging and deteriorating civil infrastructures have raised growing concerns about safety, functionality, and resilience. 1 To address these challenges, more digitalized, data-centric approaches have been developed, such as structural health monitoring (SHM) systems and frameworks, which utilize dedicated sensors, including strain gauges, accelerometers, and fiber-optic sensors, to detect structural degradation and facilitate timely maintenance. 2 SHM-based solutions provide high-resolution data, enabling the early detection of potential failures and supporting effective infrastructure management. 3 However, despite their benefits, the initial costs associated with purchasing, installing, calibrating, and maintaining these sensor networks, along with the need for specialized personnel, limit their widespread adoption. 4 As a result, only a small fraction of infrastructure assets, often high-profile or critical structures, are continuously or intermittently monitored, while the vast majority remain unassessed between periodic manual inspections. 5 This gap in monitoring creates significant uncertainty for infrastructure owners, operators, and policymakers, making timely and data-driven decision-making challenging. 6
In parallel with these challenges, the rapid advancement of sensing technologies and automated data logging within urban areas and emerging Smart & Connected Cities/Communities (S&CC) has generated vast data streams for various operational purposes.7–11 Intelligent transportation systems monitor traffic flow using inductive loops, 12 global navigation satellite system (GNSS), 13 and vehicle-to-infrastructure communication, 14 while smart grids track power distribution through smart meters and voltage sensors. 15 Water networks detect leaks with pressure sensors and flow meters, 16 and parking garages rely on ultrasonic sensors 17 and automated license plate recognition (ALRS) cameras for occupancy monitoring. 18 Tunnels enhance safety through air quality sensors and adaptive lighting, 19 while toll systems use radio frequency identification,20,21 ALPR, and weigh-in-motion (WIM) systems 22 for vehicle classification and load tracking. Connected Vehicles (CVs) record critical data via onboard sensing mechanisms, including inertial measurement units (IMUs) and GNSS for diagnostics, navigation, and route optimization. 23 Smartphones and wearable devices continuously collect data on motion, location, and health conditions, while traffic cameras equipped with AI-powered imaging track vehicle speed, lane usage, and weather conditions. 24 Satellites, using synthetic aperture radar (SAR) and optical imaging, provide data for weather forecasting, navigation, environmental monitoring, and telecommunications.25,26 More recently, delivery drones and autonomous robots utilizing GPS, light detection and ranging (LiDAR), optical cameras, and ultrasonic sensors support logistics through package deliveries, aerial mapping, and efficient transportation.27,28
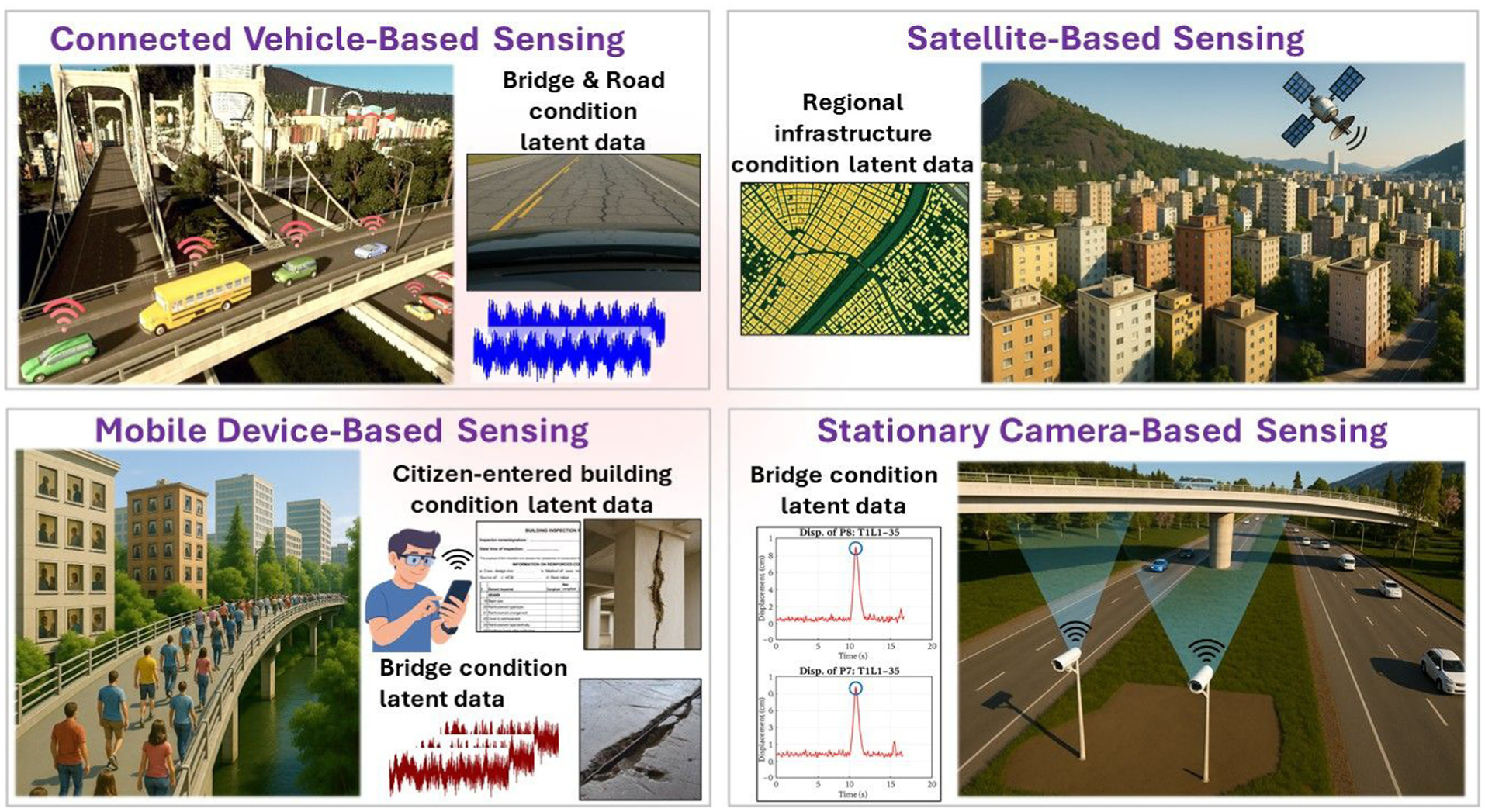
The examples discussed illustrate some of the representative data streams or sensing mechanisms within urban areas, and there could be many more examples. Leveraging these sensing mechanisms could provide valuable insights into infrastructure assessment in a practical and effective way. In fact, in recent years, researchers and industry professionals have begun exploring ways to repurpose some of these data sources for infrastructure condition monitoring and assessment, aligning with the broader S&CC vision, which emphasizes the integration of advanced sensing, data analytics, and connectivity to enhance urban efficiency, sustainability, and proactive infrastructure management.29,30 This vision also aligns with the Infrastructure Systems and People paradigm, which emphasizes the reciprocal relationship between constructed engineered systems, the data flows that underpin them, and the communities that design, operate, and ultimately benefit from them. For instance, CV-Based Sensing31–33 and Mobile Device-Based Sensing,34–36 which leverage crowdsourced data, have been utilized to assess roads, bridges, and other types of civil infrastructure systems. On the other hand, Satellite-Based Sensing has been employed to track infrastructure subsidence, structural deformation, and long-term shifts.37–39 Similarly, Stationary Camera-Based Sensing leverages pre-existing non-mobile camera systems, such as Closed-Circuit Television (CCTV) and traffic or other urban surveillance cameras, that have been repurposed to monitor infrastructure dynamics, including the tracking of structural movements to support improved operation and serviceability.40–42
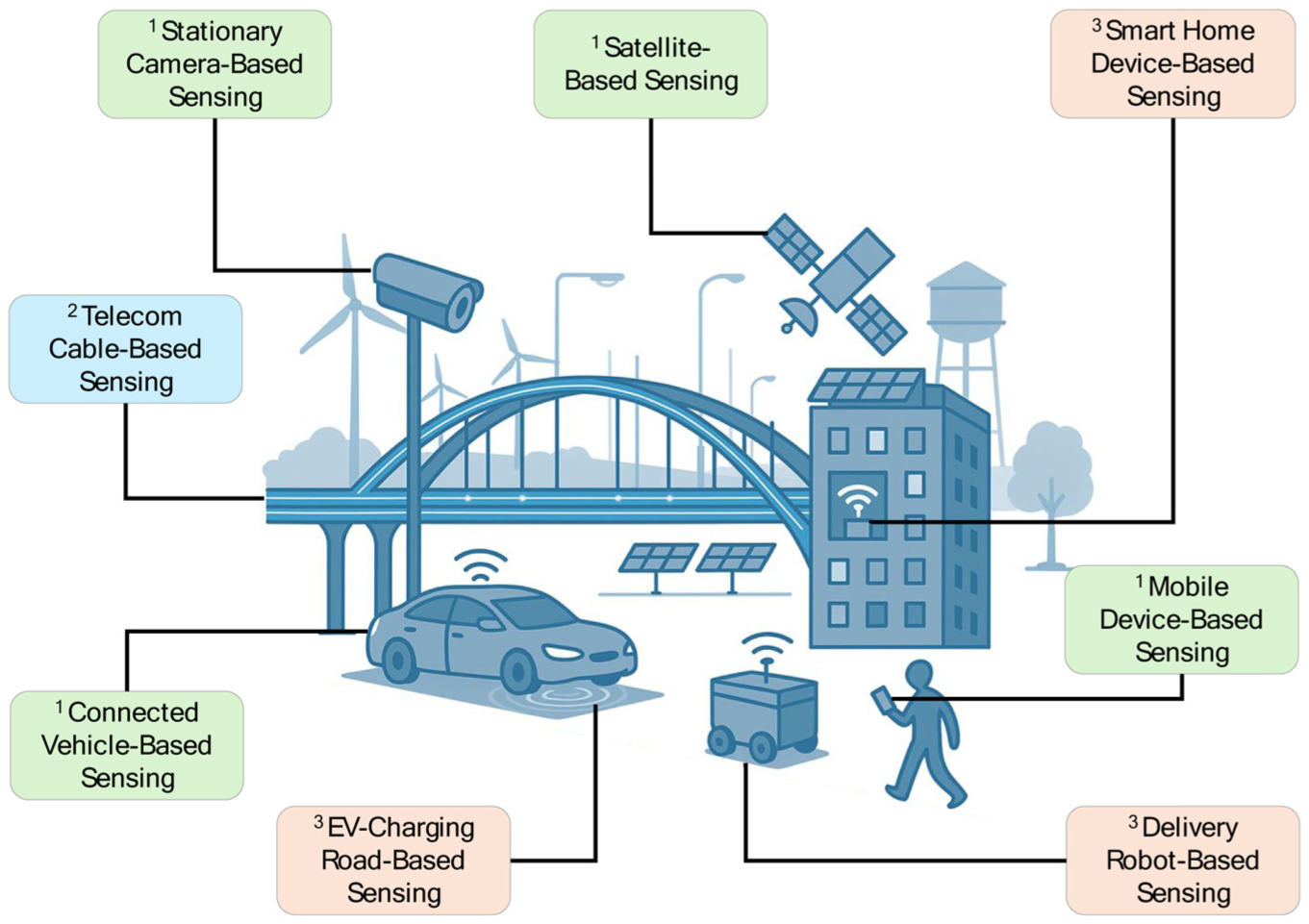
Despite the vast amounts of data continuously generated in modern urban environments, only a small fraction has been repurposed for infrastructure health monitoring. Because these sensing mechanisms were originally designed for other operational purposes rather than SHM, much of their potential remains untapped. For instance, fiber-optic telecommunication (telecom) lines were developed primarily for communication rather than infrastructure sensing. However, a growing body of research43,44 is now advancing the way infrastructures are monitored, repurposing existing signal-carrying infrastructure (e.g., fiber optics) to monitor assets such as bridges, roadways, and railways. This emerging area is referred to in this article as Telecom Cable-Based Sensing. With the increasing availability of data streams in urban environments, we believe that there could be many more practical civil infrastructure health monitoring approaches using repurposed data, such as sensing through delivery robots, EV-charging roads, and smart home devices. We define this broader, future-oriented civil infrastructure sensing domain as Latent Infrastructure Sensing (LIS). These diverse applications are illustrated in a representative figure (Figure 1).
Although the term “LIS” is newly introduced, many of its underlying ideas, such as repurposing vehicle,45,46 mobile device,47,48 satellite,49,50 camera,40,51 and telecom data,43,52 as mentioned earlier, have already appeared across several recent studies. LIS therefore formalizes and unifies these emerging efforts into a coherent sensing paradigm that reflects today’s data-rich urban environments and the increasing need for scalable, continuous, and cost-effective condition monitoring.
This emerging approach of repurposing existing sensing mechanisms in urban areas for infrastructure health monitoring offers significant promise for continuously tracking infrastructure health. Instead of relying solely on dedicated SHM instrumentation, 53 infrastructure monitoring and assessment can be achieved by leveraging the wealth of data already being collected through non-dedicated sensing systems, which were primarily designed for other operational purposes. This potentially reduces the need for additional sensor deployments, which makes infrastructure monitoring more scalable and cost-effective. 54
Despite the rapidly growing interest in this growing scientific domain, 55 it has lacked a unifying identity, cohesive framework, and systematic structure. In this article, we formalize this area under the name LIS, defining a structured foundation for its progress in the scientific literature. The term “latent” reflects the fact that these LIS mechanisms inherently capture valuable infrastructural health data through indirect sensing with non-dedicated tools, but their monitoring potential remains concealed, underutilized, or unexplored. While the data necessary for infrastructure health monitoring and assessment is already embedded within the urban areas, it must be extracted, analyzed, and systematically integrated to serve SHM applications effectively. Defining LIS helps organize this emerging field into a coherent and structured domain, bringing together diverse existing sensing mechanisms, addressing methodological gaps, and advancing practical approaches for infrastructure health monitoring. Essentially, this article provides the foundation for LIS by reviewing existing and emerging research that aligns with its principles and introducing novel approaches to expand its scope and impact within the evolving concept of S&CC.
Objectives and contributions
The overarching objective is to identify the emerging area of LIS as a cohesive, structured scientific domain, specifically:
To establish LIS as a scientific domain by defining its foundation, scope, and role in repurposing existing sensing mechanisms,
To review and categorize existing LIS research by analyzing representative studies, identifying methodologies and their effectiveness, and
To propose future directions for LIS by introducing emerging and future sensing opportunities that expand its applicability and impact within the S&CC domain.
Achieving these objectives leads to the following key contributions:
The formalization of LIS as a structured scientific domain to establish its conceptual foundation and differentiate it from conventional SHM approaches,
Synthesis of representative existing LIS research, categorizing prior efforts, overviewing methodologies used in repurposing sensing mechanisms, and
Introduction of potential emerging and future LIS applications to demonstrate novel ways to utilize existing sensing mechanisms for scalable and cost-effective infrastructure health monitoring and assessment.
Latent infrastructure sensing: Definition and framework
Advances in SHM and positioning of LIS
Over the past three decades, SHM has progressed from isolated sensing deployments to instrumented, high-fidelity digitalized systems capable of tracking structural behavior with increasing accuracy.56,57 Early SHM relied heavily on wired accelerometers, strain gauges, and periodic data collection, offering high-quality measurements but requiring substantial installation effort and cost.30,42,58–60 Subsequent advances addressed these challenges through (1) the adoption of wireless sensor networks, 61 which reduced cabling demands; (2) improved data processing and system identification algorithms that enhanced modal identification under ambient excitation 62 ; (3) uncertainty-aware probabilistic prediction frameworks that improved multi-step forecasting, missing-data imputation, and environmental adaptation under extreme events 63 ; (4) automated damage detection frameworks 64 and generative modeling to generate representative response data65,66; and (5) the integration of high-resolution sensing technologies such as fiber-optic sensors, 67 vision-based systems, 68 and unmanned aerial vehicle (UAV)-enabled data acquisition.69,70 These developments collectively improved accuracy, reliability, and automation, yet SHM deployments remain constrained by cost, limited spatial coverage, maintenance demands, and the need for dedicated monitoring systems.
At the same time, several technological and societal shifts have begun to reshape what is possible for infrastructure monitoring.71,72 Cities now generate massive volumes of continuous, high-frequency data through transportation systems,73,74 telecom networks, 75 consumer devices, 76 satellites, 37 and security infrastructures, 77 most of which operate independently of SHM. Meanwhile, advances in artificial intelligence (AI),78,79 data fusion, 80 and edge computing 81 have enabled the extraction of subtle structural information from heterogeneous, lower-fidelity data streams. These conditions create a unique opportunity to rethink infrastructure sensing beyond the traditional SHM paradigm.
LIS approaches build on this opportunity by repurposing ubiquitous, non-dedicated sensing mechanisms to infer structural conditions at scale. Whereas SHM focuses on high-resolution, purpose-built measurements at specific structures, LIS captures structural responses that inherently exist within everyday urban data flows but have remained largely underutilized. LIS differs from SHM in its practicality and breadth: it can operate continuously across large networks without requiring new installations, enabling city-wide situational awareness and complementing traditional SHM with richer spatial and temporal context. Rather than replacing SHM, LIS expands its operational envelope, offering scalable early-warning capabilities, bridging data gaps between periodic inspections, and keeping digital twins updated through continuous ambient information. In this way, LIS represents a transformative extension of SHM, shifting from structure-specific instrumentation to infrastructure-wide, multi-modal, data-driven monitoring.
The sensing modalities in LIS encompasses methodologies that repurpose operational data sources, such as vehicle telemetry, mobile device motion data, satellite imagery, telecom network signals, and stationary camera feeds, which inherently and indirectly embed structural response signatures (e.g., vibrations, displacements, deformation patterns, and load effects). These data streams contain structural information that is typically “latent,” meaning the relevant signals are concealed within measurements collected for other operational purposes. Extracting this information requires specialized processing, filtering, and analytical methodologies capable of revealing structural performance indicators from heterogeneous, lower-fidelity, and often noisy data. A defining strength of LIS is its ability to exploit infrastructures and sensing systems already deployed across urban environments, providing the potential for unprecedented spatial and temporal monitoring coverage without additional sensor installation. By transforming continuously generated operational data into meaningful condition indicators, LIS enables network-level awareness and supports ongoing assessment of infrastructure performance. Although this approach offers strong advantages in scalability and practicality, deriving reliable and actionable structural insights requires rigorous validation against traditional inspection data and SHM measurements to ensure that convenience and cost-efficiency do not compromise accuracy.
Currently, we envision LIS as a complementary component within a hybrid infrastructure monitoring strategy rather than a replacement for traditional human-based inspections. Periodic/routine in-person inspections, potentially enhanced with advanced technologies, such as drones, AI, and Computer Vision, deliver high-resolution, high-fidelity assessments (relative to LIS applications) that are essential for detailed, low-level evaluations of critical infrastructure. We refer to this focused, localized, and technologically augmented inspection process within this hybrid monitoring strategy as Targeted Infrastructure Sensing (TIS). In contrast, LIS enables a more continuous, high-level, scalable monitoring approach, offering broader yet strategically valuable contextual insights that support ongoing asset management and risk awareness. With continued research, field investigations, and validation through large-scale deployments, this hybrid monitoring approach has strong potential for practical implementation in civil infrastructure systems.
For example, such a hybrid monitoring strategy is representatively visualized in Figure 2. The upper plot illustrates a long-term trajectory of infrastructure condition states, along with associated potential uncertainty bands derived from LIS. Overlaid on this are periodic, detailed inspections (relative to LIS) obtained through TIS, conducted every 10 years. The data collection period varies depending on the asset type and local regulations. As a representative example, high-rise buildings located within designated coastal zones in Florida are typically inspected every 10 years, 82 whereas routine bridge inspections in the United States typically occur every 2 years. The zoomed-in lower plot shows the year 45–50 region, where monthly LIS data points (this can also be weekly or daily, depending on the monitoring needs) offer more continuous insight and trend visibility, while the detailed TIS data at year 50 provides a calibration point with potentially lower uncertainty due to the higher rigor of in-person inspections. This example illustrates how integrating sparse but detailed inspections with dense LIS data can provide both resolution and coverage in infrastructure condition monitoring and assessment.
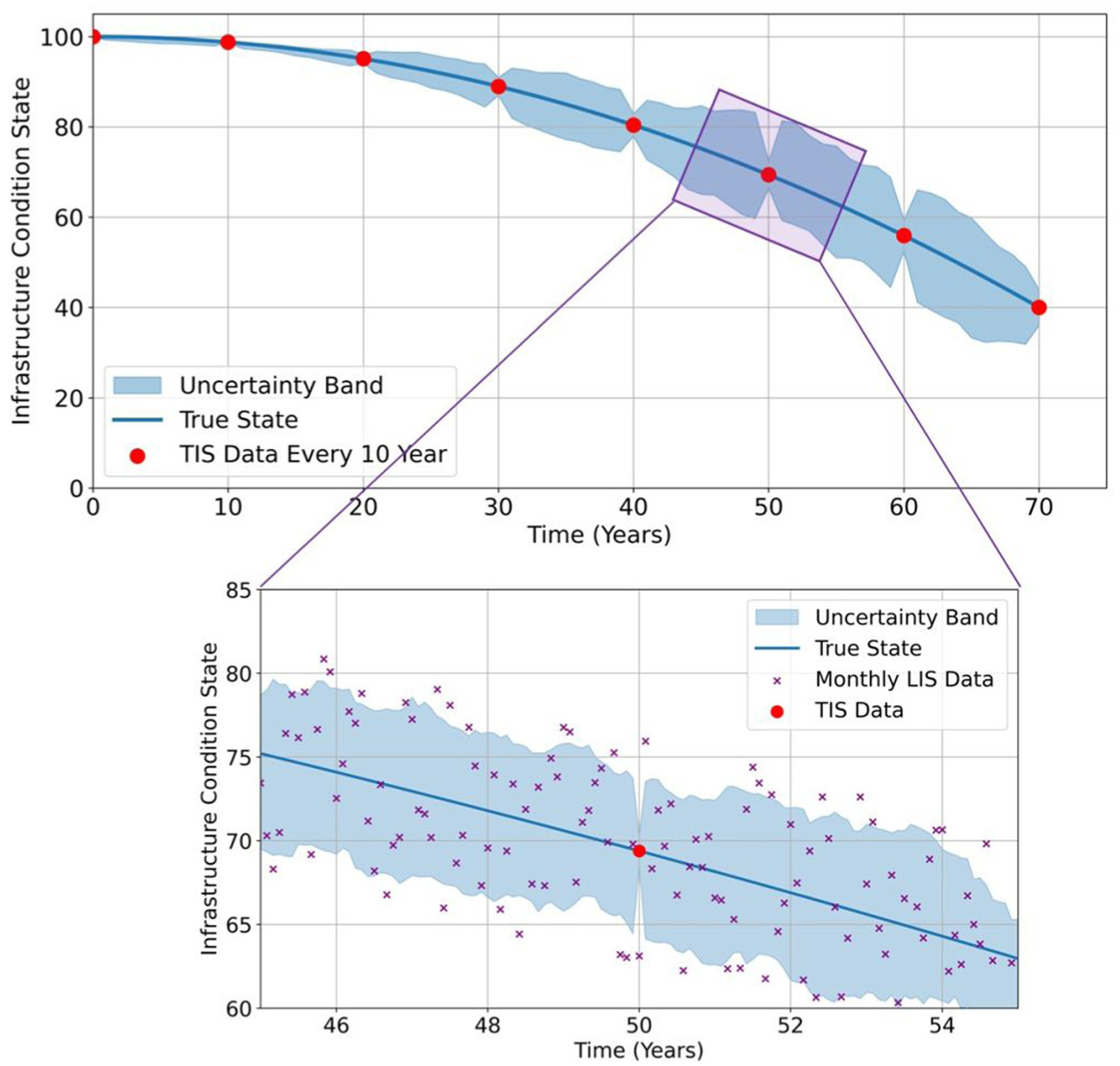
Hybrid infrastructure monitoring strategy combining periodic TIS with continuous LIS data. TIS: Targeted Infrastructure Sensing; LIS: Latent Infrastructure Sensing.
Such a hybrid monitoring approach also addresses the critical gap in the rapidly growing research domain of digital twins for civil infrastructures 83 : data scarcity. Digital twins fall out of sync with reality due to the various challenges in obtaining data from infrastructure and the periodic nature of in-practice inspection procedures. LIS, on the other hand, delivers continuous data streams that can serve as an always-on sensing backbone, which keeps digital replicas up to date for more informed forecasting and decision-making through updated digital models. With continued research and large-scale deployment, LIS applications have a strong potential to enable more informed digital twins and, thus, more insightful infrastructure management.9,84,85
Additionally, as cities increasingly rely on integrated digital representations of their built environment, 86 the information generated by LIS naturally interfaces with broader urban modeling frameworks. 87 While LIS is conceptually distinct from systems such as city information modeling (CIM) and urban landscape (UL) analysis, it can meaningfully complement them.88–90 CIM and UL frameworks provide spatial, morphological, and functional representations of the urban environment, whereas LIS supplies dynamic, condition-based information extracted from non-dedicated sensing sources. Integrating LIS-derived structural indicators into CIM and UL layers can enrich city-scale models with continuously updated infrastructure health information, enhancing planning, monitoring, and decision-making capabilities across multiple infrastructure domains.
As LIS begins to play a larger role in both infrastructure monitoring and its integration with urban-scale systems, it becomes essential to establish clear criteria that define what constitutes a scientifically rigorous and practically viable LIS approach. To this end, we suggest that for a system to qualify as LIS and be effectively adopted by infrastructure operators in daily practice, it must consistently embody four essential properties: Reliability, Effectiveness, Actionability, and Practicality, collectively referred to as the REAP (Reliability, Effectiveness, Actionability, and Practicality) properties (named after the initials of each property). While LIS can be inherently practical due to its reliance on existing sensing mechanisms, the insights it generates must also be reliable, accurate, and actionable to ensure meaningful real-world applications. These properties provide a foundation for defining LIS in a manner that ensures scientific robustness, interpretability, and operational value. Figure 3 provides an overview of LIS’s foundation, illustrating the REAP properties along with their quantification parameters. It also highlights LIS’s five key dimensions—Technical, Social, Economic, Organizational, and Environmental—and depicts the key outcomes of effectively embodying LIS, including Proactive Decision-Making, Resource Efficiency, and Increased Safety. The following subsections elaborate on these properties, dimensions, and outcomes.
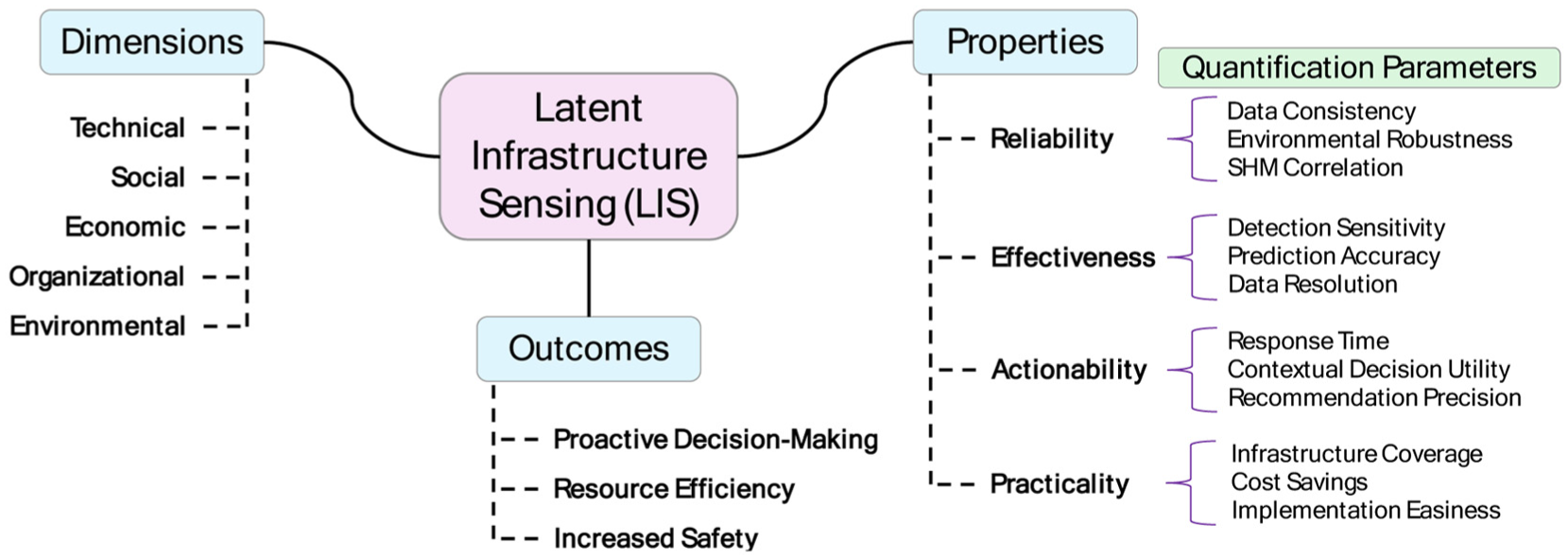
LIS’s properties, dimensions, and outcomes. LIS: Latent Infrastructure Sensing.
It is essential to note, however, that sensing approaches that collect data solely from external environmental dynamics rather than from the infrastructure itself do not fall within the scope of LIS. To be considered an LIS application, the data must be collected from the infrastructure, meaning that the sensing mechanism, not originally intended for infrastructure health monitoring, must inherently capture some aspect of the structure’s physical response, such as vibration, displacement, or deformation. For example, ocean buoys monitor environmental dynamics (e.g., storms and wind), which, when analyzed, can indicate potential stress and damage risks for coastal infrastructures or salinity and pH changes, which may suggest corrosion in the local bridges and offshore platforms. Such a data collection mechanism falls outside the scope of LIS, as no data collection is made directly from the infrastructure. Another example of a system that falls outside the scope of LIS is WIM systems. While WIM systems directly collect data from the infrastructure, they are primarily designed for traffic management, infrastructure design, and maintenance planning. Since LIS focuses on repurposing sensing mechanisms that were not originally intended for infrastructure health monitoring, WIM systems “alone” do not align with the core principles of LIS and, therefore, are not considered part of its application space.
LIS properties
Starting with the LIS’s properties, Reliability ensures that LIS consistently delivers reliable data over time, enabling stakeholders to make informed decisions based on the provided information. Quantifying reliability involves several approaches: (1) Data Consistency, which evaluates the stability of LIS outputs across multiple assessments, ensuring that repeated measurements yield similar results; (2) Environmental Robustness, which measures how well LIS performs under varying conditions, such as changes in weather, traffic patterns, or various external settings, indicating the system’s robustness to environmental and operational conditions; and (3) SHM Correlation, which examines the degree to which LIS results align with validated data collected by traditional SHM methods, providing a benchmark for accuracy and reliability.
Effectiveness, on the other hand, pertains to the system’s capability to accurately capture the health condition of the infrastructure based on the features extracted from the data. Key performance indicators for effectiveness include: (1) Detection Sensitivity, which indicates the system’s overall proficiency in identifying structural issues, reflecting its ability to detect anomalies or defects within the infrastructure; (2) Prediction Accuracy, which compares LIS-generated predictions to actual, ground truth conditions, evaluating the precision of the system’s assessment; and (3) Data Resolution, which refers to the level of detail at which data can capture structural responses as well as already existing sensor capabilities (e.g., measurement range and resolution).
Actionability refers to the ease and directness with which insights generated by the sensing system can inform real-world decisions and interventions. Metrics to assess actionability include: (1) Response Time, which measures the duration between the identification of an issue by LIS and the initiation of remedial action, highlighting the system’s efficiency in prompting timely interventions; (2) Contextual Decision Utility, which assesses how often LIS insights have the potential to influence decisions within the context of a specific decision framework, recognizing that the value of information is contingent on the cost, risk, and feasibility of available actions (e.g., a recommendation to close a bridge may have little practical value if the cost of closure is high, regardless of data quality); (3) Recommendation Precision, which evaluates the clarity and specificity of the guidance derived from LIS data (after appropriate data processing and analysis), ensuring the recommendations are well-tailored to identified conditions and can support decision-making if aligned with operational constraints.
Practicality refers to the ease with which data collection procedures from infrastructures can be implemented. It involves the strategic use of existing infrastructure and data sources, reducing or eliminating the necessity for additional installations and associated expenses. This makes infrastructure monitoring both feasible and scalable by capitalizing on existing resources. Quantifying practicality includes the following parameters: (1) Infrastructure Coverage, which assesses the proportion of the network that LIS can monitor relative to conventional SHM systems, indicating the breadth of the system’s monitoring capabilities; (2) Cost Savings, which compares the financial implications of implementing LIS against traditional SHM methods, highlighting potential reductions in expenditure; (3) Implementation Easiness, which assesses the relative ease of repurposing existing sensing mechanisms compared to the complexity of installing dedicated SHM systems, considering data accessibility, compatibility with existing infrastructure, and the minimal adjustments required to extract and analyze latent data streams, thereby highlighting LIS’s cost-effectiveness and scalability.
While these quantification parameters provide a conceptual basis for evaluating LIS, future research should further operationalize the REAP properties through validated quantitative indicators and standardized benchmarking procedures across different LIS modalities.
LIS dimensions
LIS draws upon five core dimensions, Technical, Social, Economic, Organizational, and Environmental, to ensure a holistic and sustainable approach to infrastructure assessment. The technical dimension centers on leveraging innovative sensing approaches and advanced data processing and computational methodologies to reveal information about structural health conditions. The social dimension highlights the importance of user acceptance, stakeholder cooperation, and community trust, which are crucial for successfully implementing new monitoring strategies and enhancing public safety by detecting and addressing infrastructural risks before they escalate. The economic dimension aims to optimize existing resources by reducing the costs of hardware, installation, and maintenance through the repurposing of current sensing infrastructures. In doing so, it also contributes positively to broader economic well-being by limiting disruptions and protecting investments through more reliable infrastructure performance. Meanwhile, the organizational dimension addresses the policies, administrative structures, and leadership required to integrate LIS practices into standard asset management procedures, ensuring long-term viability, scalability, and coordinated efforts across various stakeholders. The environmental dimension promotes sustainable infrastructure monitoring by aligning assessment practices with broader goals, such as reducing carbon emissions and minimizing waste from physical inspections and the use of hardware. It encourages decision-makers to consider environmental impacts alongside technical, social, and economic factors, thereby supporting long-term sustainability.
LIS outcomes
While the LIS dimensions represent the foundational realms that shape how latent sensing systems are conceptualized, designed, and implemented (e.g., the means), the LIS outcomes refer to the results or impacts that emerge from applying these dimensions effectively. Dimensions guide the structure and principles of LIS, whereas outcomes reflect the benefits that arise when LIS is successfully embedded in infrastructure monitoring practices.
By operationalizing its five core dimensions, LIS delivers three principal outcomes: Proactive Decision-Making, Resource Efficiency, and Increased Safety, through the embodiment of LIS’s dimensions and properties. Proactive Decision-Making emerges from the continuous gathering of meaningful insights through latent data streams, which enable near-real-time assessment of infrastructure performance and adaptive decision-making. This proactive awareness enables stakeholders to detect emerging issues early, allowing for more targeted interventions and extended asset life. Resource Efficiency is achieved by maximizing the utility of existing sensor networks, thereby minimizing the need for new hardware, installation, or maintenance costs. Leveraging already-installed systems both conserves budgetary resources and reduces operational disruptions, thereby enhancing infrastructure sustainability and supporting stronger local and regional economies by ensuring the reliable performance of critical assets. The reduced financial burden associated with infrastructure monitoring translates into more funds available for other pressing needs, which creates a positive feedback loop in overall asset management. Increased Safety is realized through improved accuracy and continuity in infrastructure assessments. Through proactive detection and addressing potential issues, infrastructure managers can lessen the risk of catastrophic failures and bolster public confidence in the reliability of transportation networks, power grids, water systems, and other critical assets. This heightened safety also aligns with the social dimension of LIS, as it promotes community trust, fosters user acceptance, and safeguards economic stability through fewer service disruptions. Collectively, these three outcomes underscore the transformative potential of LIS in delivering a more resilient, resource-conscious, and secure infrastructure landscape.
Framework
Although promising in terms of practicality, repurposing existing sensing mechanisms for infrastructure health monitoring requires rigorous methodological considerations to ensure that the insights generated are accurate, actionable, and reliable. Unlike conventional SHM systems that provide high-resolution, high-fidelity measurements tailored to specific structural health parameters, LIS extracts information from heterogeneous data streams that were not originally designed for infrastructure monitoring. This introduces challenges related to data consistency, accuracy, and insight extraction, necessitating a well-structured framework to ensure that LIS remains a robust approach. To address these challenges, we propose a cyclic framework that aims to transform raw data into meaningful, actionable intelligence while aligning with the REAP properties. We refer to this as the LIS Intelligence Framework, which is illustrated in Figure 4.
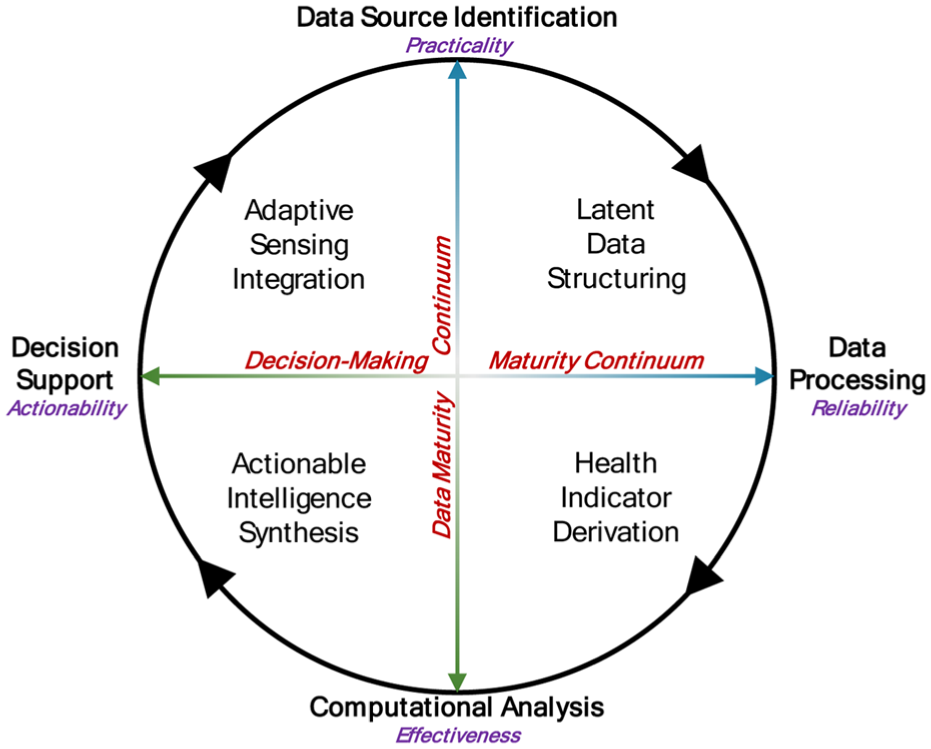
LIS Intelligence Framework.
The LIS Intelligence Framework consists of four phases, each responsible for processing and refining latent data sources into actionable intelligence. The first phase, Data Source Identification, focuses on selecting and integrating pre-existing sensing mechanisms embedded within urban environments while ensuring the sensing is practical. Following data acquisition, the Data Processing phase ensures that raw data, which may contain noise, inconsistencies, and irregularities, undergoes latent data structuring, such as filtering, cleaning, and calibration to improve data reliability. Once processed, the data enters the Computational Analysis phase, where advanced computing tools and techniques, such as AI, 66 data fusion, and physics-based modeling, are employed to derive meaningful insights. This phase ensures effectiveness by assisting in the accurate identification of structural health conditions through the detection of structural changes and degradation patterns. In the final phase, Decision Support translates data-generated insights from LIS into operational strategies for future maintenance, repair, and risk mitigation plans. Here, decision-makers utilize processed intelligence to optimize resource allocation, prioritize interventions, and guide long-term infrastructure management to ensure that LIS remains actionable in real-world scenarios.
Within this framework, LIS operates along two fundamental continuums that define how data matures and influences decision-making. The Data Maturity Continuum spans from Data Source Identification to Computational Analysis, guiding the transformation of raw, unstructured latent data into validated, structured health indicators. As data progresses, it undergoes processing and refinement, gaining accuracy and reliability until it becomes suitable for quantitative condition assessment. Parallel to this, the Decision-Making Continuum extends from Data Processing to Decision Support, where fragmented insights are synthesized into actionable intelligence. As data progresses along this continuum, it is progressively refined into predictive assessments and strategic recommendations, ensuring that LIS insights are both scientifically robust and operationally relevant for infrastructure management.
Beyond the phases and continuums, LIS operates through four functional regions, as shown in Figure 4. Latent Data Structuring standardizes raw data for reliability, while Health Indicator Derivation extracts meaningful infrastructure health metrics for effective condition assessment. Actionable Intelligence Synthesis bridges analysis and decision-making by converting insights into actionable recommendations for infrastructure management. Lastly, Adaptive Sensing Integration serves as the feedback loop where decision outcomes refine future data acquisition strategies and subsequent phases to enhance LIS’s practicality and ensure continuous improvement in infrastructure sensing methodologies.
Existing applications in LIS
Through a review of the scientific literature, four major application areas have been identified in the domain of LIS: CV-Based Sensing, Mobile Device-Based Sensing, Satellite-Based Sensing, and Stationary Camera-Based Sensing. These categories encompass a range of approaches to infrastructure monitoring. The following subsections present the four LIS applications at a high level, presenting some representative research efforts. As illustrated in Figure 5, each sensing approach enables the collection of latent data, which refers to infrastructure condition information that is not directly measured by dedicated monitoring systems but is instead inferred/extracted from existing data streams (e.g., vehicle motion, smartphone activity, satellite imagery, or camera footage) through the use of computational methodological approaches. This latent data from monitoring can reveal important indicators of structural health, such as road roughness (e.g., International Roughness Index), bridge dynamics (e.g., modal parameters), or building settlements (e.g., settlement rate or tilt angle over time), without requiring additional sensors to be installed on the infrastructure itself.
Main existing applications of LIS. LIS: Latent Infrastructure Sensing.
CV-Based Sensing and Mobile Device-Based Sensing are forms of crowdsensing because measurements originate from large numbers of moving units, such as vehicles in traffic or smartphones in pockets. In crowdsensing, two key modes of data collection emerge: (1) opportunistic sensing and (2) participatory sensing. Opportunistic sensing repurposes data that a device already collects during normal use. The information is not originally gathered for the sensing task; its value appears only when someone later recognizes its relevance, making the contribution incidental. Participatory sensing, on the other hand, is intentional. Users knowingly provide measurements for a shared goal, consenting to any privacy, bandwidth, or battery trade-offs because they see value in the collective outcome. In both opportunistic and participatory sensing, there are two modes of data collection based on the measurement triggering: (a) active sensing and (b) passive sensing. Active sensing begins when a user, app, or control routine deliberately initiates recording at a specified time or location. Passive sensing runs automatically in the background once initial consent or configuration is set, logging data with no further intervention. These data-collection modes can be illustrated with examples as follows: in an opportunistic–active scenario, a driver switches on a dash-cam for insurance, and engineers later mine the footage for pavement defects; in an opportunistic–passive case, when a fitness app silently logs accelerometer data for step counting that researchers later repurpose to estimate bridge vibrations; in a participatory–active sensing case, residents open a monitoring app on their smartphones and tap “Record” to capture structural details in their apartments for a shared study; in participatory–passive scenario, it can be exemplified by vehicles that, once drivers opt-in, automatically stream low-rate suspension data in the background to a pavement-monitoring platform.
In this article, we do not specifically classify the studies in the CV-Based Sensing and Mobile Device-Based Sensing applications as opportunistic, participatory, active, or passive. Since crowdsensing is a growing domain, existing research has primarily focused on demonstrating the feasibility of using crowd-sensed data to assess infrastructure health rather than examining the level of human involvement during sensing. However, human involvement presents diverse challenges, such as data privacy, data collection incentives, and ethical considerations. Research on these aspects for crowdsensing applications, as well as for the other two LIS applications, holds immense value.
It is also important to clarify terminology. In the broader literature, the terms drive-by monitoring, indirect monitoring, and crowdsensing are sometimes used interchangeably, yet they refer to related but distinct concepts. Drive-by monitoring traditionally describes the use of a single moving vehicle equipped with sensors (e.g., accelerometers on a vehicle) to infer bridge properties through vehicle–bridge interaction. Indirect monitoring extends this concept by emphasizing that the structure itself is not instrumented. Instead, its condition or response is inferred from measurements obtained through an auxiliary carrier, such as a vehicle, robot, bicycle, pedestrian, or even an orbiting satellite, whose sensors capture signals influenced by the structure during routine passage or remote observation. Crowdsensing, in contrast, extends indirect monitoring to large populations of moving units (e.g., vehicles, people), each contributing opportunistic measurements. Whereas drive-by and indirect monitoring focus on the sensing mechanism, crowdsensing emphasizes scale, human involvement, and distributed data collection.
CV-Based Sensing
CVs are modern vehicles (e.g., cars, buses, trucks, trains, etc.) equipped with communication technologies and onboard sensors that enable them to interact with other vehicles, infrastructure, and their surroundings. In this article, we refer to the collection of data from CVs for infrastructure health monitoring as CV-Based Sensing. This approach utilizes factory-installed sensors within CVs (or onboard sensors), such as accelerometers, gyroscopes, visual sensors (e.g., cameras and LiDARs), and GPS devices. Onboard sensors are becoming increasingly prevalent in modern vehicles like CVs, and advancements in communication technologies now enable them to interact seamlessly with their surroundings, including other vehicles and nearby infrastructure systems. Among these sensors, accelerometers are commonly used due to their low cost and ease of implementation. As vehicles travel over or near infrastructures such as roads, railways, and bridges, they gather valuable data related to the structural conditions.91,92 Although these onboard sensors are not originally designed for monitoring, the data they capture can still yield valuable insights. Through advanced computational processing, it is possible to filter out external influences, such as engine noise, vehicle suspension dynamics, and surface roughness, and uncover the underlying structural signals of interest.93,94
The direct use of native CV onboard sensors to monitor roadways, railways, or bridge structures has not yet been observed in the literature, aside from a few preliminary works reported in the studies by Oshima et al., 95 Mahlberg et al., 96 and Yan et al. 97 On the other hand, many studies have successfully shown the feasibility of collecting valuable infrastructure monitoring data through “additional” sensors mounted within vehicles (in real-world or simulation settings), such as SHM sensors, smartphones, or cameras to represent/simulate CV-based onboard data acquisition.45,98–101 Since using onboard sensors is highly related to public participation, which introduces further challenges in research, most experimental studies utilized additional attachable sensorial systems to represent the CV onboard sensors.102–104 These efforts highlight the potential for continuous infrastructure monitoring using CV onboard sensor systems. In this detail, further research is needed to enable seamless transmission of onboard sensor data from CVs to centralized repositories maintained by infrastructure owners or operators. For consistency and clarity, this study refers to all such vehicle-based sensing efforts, whether from native CV sensors or simulated equivalents, as CV-Based Sensing. Based on the types of data measured, CV-Based Sensing can be categorized into two groups: (1) visual data and (2) non-visual data.
Visual data
Although many CVs already feature rich perception suites, for example, Tesla and Subaru utilize multi-camera arrays, and Volvo’s models (e.g., EX90) incorporate roof-mounted LiDAR, purely vision-based infrastructure monitoring is uncommon in the scientific literature. Most studies combine the visual stream with traditional SHM accelerometers in-vehicle to cross-check and validate events through visual data. However, image, video, or point-cloud collection from a large fleet poses heavy computational, bandwidth, and storage demands, so visual sensing would be limited to event-triggered snapshots or short bursts, while the lower-volume vibration data serves as the primary monitoring feed. The following are some representative studies from the literature.
A study by Mahlberg et al. 96 noted that modern vehicles equipped with factory-installed sensors (e.g., CVs) travel on roadways daily and can passively evaluate infrastructure conditions with an accuracy that falls between qualitative assessments and rigorous construction acceptance methods. They used GoPro cameras to validate pavement roughness qualitatively and found that the accuracy and reliability of crowdsourced pavement roughness data were comparable to those of the industry-standard inertial profiler. Mei and Gül 105 presented a low-cost pavement-crack inspection system using a rear-mounted GoPro on a moving vehicle. They introduced ConnCrack, a 121-layer DenseNet-based conditional Wasserstein Generative Adversarial Network that outputs eight connectivity maps to curb scattered predictions. They tested the proposed method on the newly released 600-image EdmCrack600 dataset and public CrackForest-dataset set, ConnCrack surpassed existing rule-based and deep-learning methods significantly in precision, recall and F1-score. In another study, Hiasa et al. 100 evaluated an infrared camera installed on the vehicle for concrete bridge deck inspection at normal driving speeds. Comparing three infrared cameras, the research highlighted that cooled detectors (e.g., FLIR SC5600) could provide accurate delamination detection comparable to traditional nondestructive methods. Uncooled cameras showed more false detections due to image blur. Integration time of the infrared camera was shown as a key factor for high-speed applications. Moreover, Shokravi et al. 106 identified the potential of CVs for monitoring roadway bridges. They observed that LiDAR, radar, and cameras, key perception sensors used in CVs for autonomous driving, could also be utilized for infrastructure monitoring. In their study, a simulation model of an autonomous vehicle equipped with LiDAR, a camera, GPS, and an IMU was developed in ROS2 Humble. The proposed in-fleet concept for bridge health monitoring was successfully tested through this simulation.
Non-visual data
Non-visual data plays a significant role in CV-Based Sensing, with vehicle vibration through accelerometer sensors being the most common form of data in this category, as many studies have shown. By extracting the structural condition information from the vehicle vibration data, it becomes possible to monitor infrastructure health. Depending on the type of infrastructure being monitored, CV-based sensing can be classified into three categories: roads, railways, and bridges, as presented in the following paragraphs.
Road monitoring
Many researchers have explored estimating road roughness using the responses collected from a vehicle.104,107 Commonly used techniques include Kalman Filter (KF)-based methods, and inverse Newmark-Beta approaches108,109 are commonly utilized. For instance, Zhao et al. 110 utilized acceleration data collected by smartphones installed in a vehicle (representing a vehicle equipped with an onboard sensing system, as shown in Figure 6) to estimate pavement roughness. Their method involved two main steps. First, a half-car model (a simplified dynamic model that captures vertical motion and pitch, typically representing the front and rear suspensions) was used to represent the vehicle, and a Genetic Algorithm was employed to calibrate the vehicle parameters based on its response when passing over a hump of known size. In the second step, using the calibrated vehicle parameters, an augmented KF that incorporates road roughness in the state vector was applied to estimate the road profile. To further enhance accuracy, Rauch-Tung-Striebel smoothing was used. Field tests conducted on a 13 km road demonstrated that the estimated road roughness closely matched results from a laser profiler, confirming the effectiveness of the method. Later, Opara et al. 111 further explored the smartphone-based method for estimating road roughness from vehicle acceleration data. They used quarter and half-car suspension models calibrated with speed bumps. In field tests, their system showed a strong correlation with reference laser profilometer data. The accuracy was improved through data aggregation from multiple sensors and runs. They also found that localization errors affected the results as much as model calibration, emphasizing the need to address both in practical applications.
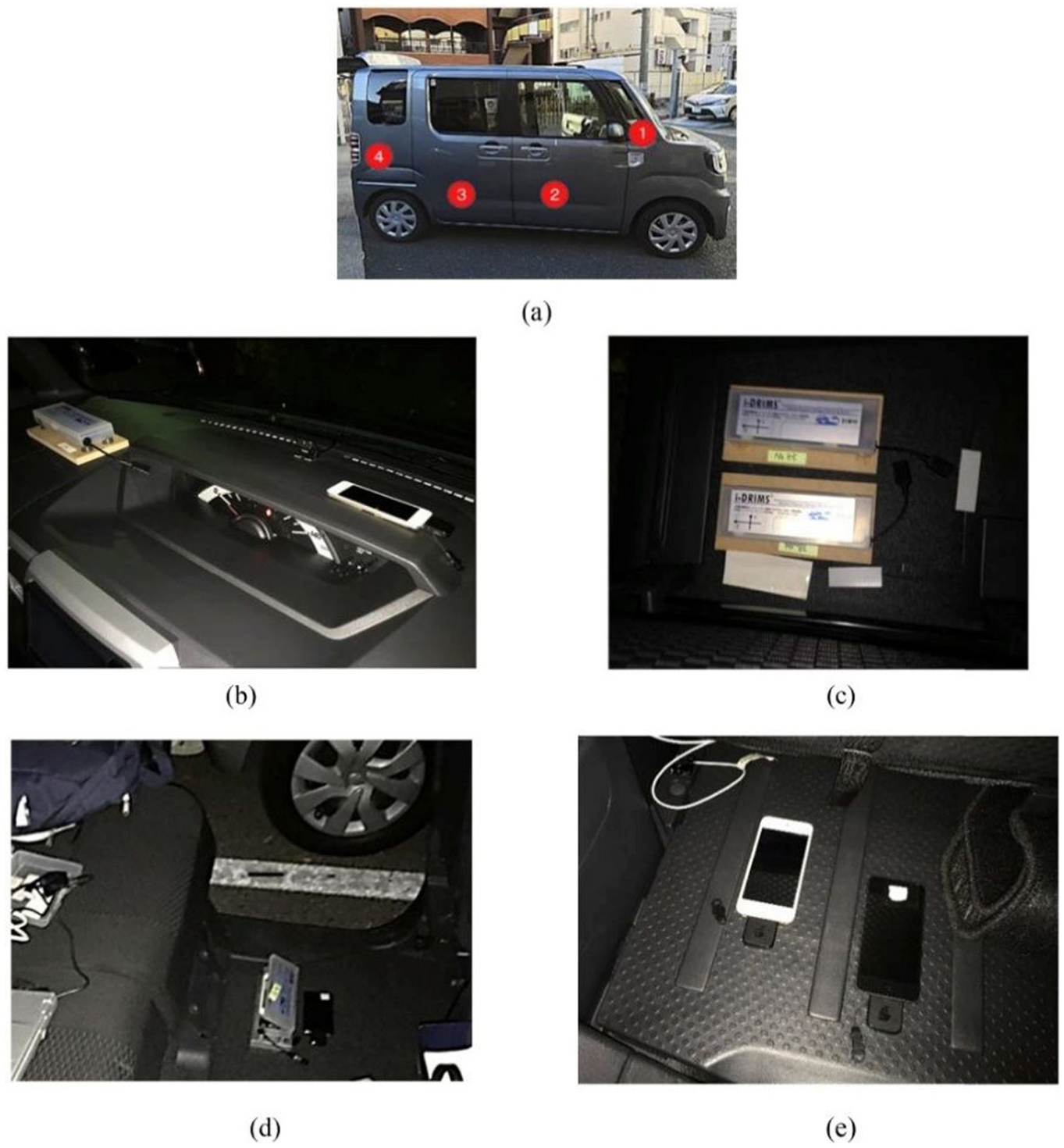
Representative study from CV-Based Sensing (sensor layout in the vehicle 110 ): (a) light vehicle sensor layout, (b) dashboard, (c) front passenger seat floor, (d) rear passenger seat floor, and (e) trunk. CV: Connected Vehicle.
Track monitoring
Similar to road roughness estimation, CV-Based Sensing can also be applied to railway track monitoring through embedded sensors in trains for detecting track irregularities or anomalies. 112 For example, Stoura et al. 113 proposed a model-based Bayesian inference method to estimate railway track irregularities. In their study, vibration sensors were attached to in-service trains. An unscented KF, along with available measurements, was used to update the train’s model parameters. Then, using the updated reduced vehicle model, the roughness profile was identified through a dual KF approach, first estimating the input and then estimating the system’s state vector, assuming the input was known. This method was successfully applied to data from a diagnostic vehicle operated by Swiss Federal Railways. Researchers also investigated the use of data-driven methods for track monitoring using train onboard sensors. For instance, using vibration data from the IRIS320 inspection train, Ghiasi et al. 114 proposed a two-stage, unsupervised onboard framework for railway track-geometry defect detection. Time-domain statistical features are ranked with ANOVA, then a subset is fed into a one-class support vector machine. The approach lifted detection accuracy 12% over raw accelerations and outperformed Isolation Forest, Local Outlier Factor, and Mahalanobis Distance across six sensor layouts.
Bridge monitoring
Last but not least, bridge monitoring through CV-Based Sensing has garnered significant research interest. In a foundational study, Yang et al. 115 modeled the vehicle as a sprung mass and the bridge as a simply supported beam with a sensor mounted on the vehicle body. The study demonstrated that the bridge’s fundamental frequency could be identified from the vehicle’s response. Later, González et al. 116 used a two-axle vehicle with sensors to estimate the damping ratios of bridges. Their method relied on identifying road roughness from the front and rear axles; the difference between the two estimations was used as the objective function in an optimization problem. Numerical simulations showed that the first-order damping ratio of the bridge could be successfully identified using vehicle responses. Yang et al. 117 proposed a method for identifying bridge mode shapes from vehicle responses. After determining the vehicle’s frequencies, the components corresponding to the bridge’s frequencies were extracted from the vehicle response. The Hilbert Transform was then used to derive the instantaneous amplitude history of the bridge component response for a given mode. The study demonstrated that when the vehicle’s speed was low, the first three mode shapes of the bridge could be accurately identified. Furthermore, the vehicle’s own dynamic characteristics often interfere with the extraction of infrastructure-related information. Readers interested in bridge health condition assessment using onboard sensor responses may refer to one of the latest review articles, which covers modal parameter identification and bridge damage detection. 98
Some additional remarks
Numerous influencing factors can hinder the implementation of CV-Based Sensing (e.g., pavement roughness, vehicle suspension, driving conditions). AI-powered methods have shown promise in improving the extraction of infrastructure-related signals from vehicle-collected data. 118 Researchers have applied neural networks to estimate road roughness,119,120 and similar techniques are increasingly being used for bridge health assessment and damage detection.121–125 Future research should aim to further automate and enhance the intelligence of CV-Based Sensing systems for infrastructure monitoring. In particular, more efficient and accurate methods are needed to estimate road roughness and isolate bridge responses from vehicle signals. To ensure scalability, these methods must be validated in real-world deployments while addressing key challenges, such as accommodating diverse vehicle types, adapting to different bridge geometries and materials, and reliably capturing signals from short, stiff spans where drive-by data is limited and more difficult to interpret.
One promising future research direction for CV-Based Sensing is the monitoring of parking garage structures, an area that remains largely unexplored. Above-ground parking facilities, particularly those built with prestressed concrete elements, often exhibit dynamic behavior due to structural flexibility, long spans, and repetitive loading. While most CV-Based Sensing research focuses on in-transit vehicle data, valuable insights can also be gained from vehicles in low-speed or stationary conditions, such as during parking, idling, or maneuvering. Onboard sensors could capture low-frequency vibrations, deflections, and transient structural movements. This passive, in situ sensing approach offers a scalable and cost-effective solution for continuous monitoring of parking structures.
Mobile Device-Based Sensing
Many modern mobile devices, including wearables like smartwatches, smart glasses (e.g., Meta Ray-Ban), and smart rings (e.g., Galaxy Ring), as well as carriables, such as smartphones, are capable of collecting various types of data, including images, videos, and vibrations. If the data gathered by these devices contains information related to infrastructure, it can be potentially used for infrastructure health monitoring purposes. 126 In this article, the use of mobile devices for infrastructure monitoring is referred to as Mobile Device-Based Sensing. Note that while full-scale augmented reality (AR) 127 and mixed reality (MR) 128 headsets are excluded here due to their bulk and limited suitability for daily use, smart glasses are considered. Smart glasses incorporate a more compact, streamlined version of AR/MR technology that enables everyday wear while still supporting lightweight immersive experiences. Similarly, tablets are excluded due to their larger size and lower mobility compared to smartphones and wearables, making them less practical for continuous, on-the-go data collection.
We did not observe a study focused on using smartwatches, smart glasses, or smart rings for infrastructure health monitoring. However, we anticipate that these devices hold significant potential for future monitoring applications. Instead, smartphones, being among the most popular mobile devices, have been widely used for various monitoring purposes.47,129 With advancements in both hardware and algorithms, these platforms have become versatile mobile sensing systems capable of collecting data, such as GPS signals, acceleration, and visual data (e.g., images, videos, point clouds) with strong potential to provide valuable insights into infrastructure conditions. 130 Therefore, this section focuses primarily on the use of smartphones. Just like the CV-Based Sensing, the studies in this section can be grouped into two categories based on the type of data collected: visual and non-visual data, as presented in the following.
Visual data
Nowadays, smartphones are equipped with high-resolution RGB cameras, depth-sensing technologies such as Time-of-Flight and Structured Light sensors, and LiDARs, enabling the capture of detailed visuals through different wavelengths. When positioned in a fixed location, they can also record the regions of interest on the infrastructure, providing structural dynamic information over time. A wide range of studies have investigated the use of visual data collected via smartphones for monitoring infrastructure health.
For example, Wang et al. 131 developed a real-time damage detection method for historic masonry buildings using images captured by smartphones. Users could collect images and upload them to a central workstation for automated damage detection, significantly reducing the need for manual labor and time. Employing smartphones as vision-based sensors, Kromanis et al. 132 filmed beams under static, dynamic, and thermal (quasi-static) loads, then extracted displacements with three free and proprietary image-processing tools. Smartphone results matched linear variable differential transformers, dial gauges, and accelerometers, capturing the first modal frequency of the beam within a 0.2% difference. Despite some thermal-drift issues, it was shown that smartphones could provide inexpensive and non-contact deformation information about infrastructures, allowing promising field deployment and future applications. Building on smartphone technology, Zhao et al. 71 introduced an urban infrastructure safety monitoring system called the Urban Safety app. The application architecture is illustrated in Figure 7. It enabled public users to contribute to infrastructure damage reporting and supported field monitoring and emergency assessment in disaster prevention and mitigation. It can collect data such as structural deformation and images, as well as user feedback, even without network access, and then upload the data once a connection is available. The processed data contributed to the creation of a comprehensive database on urban infrastructure safety.
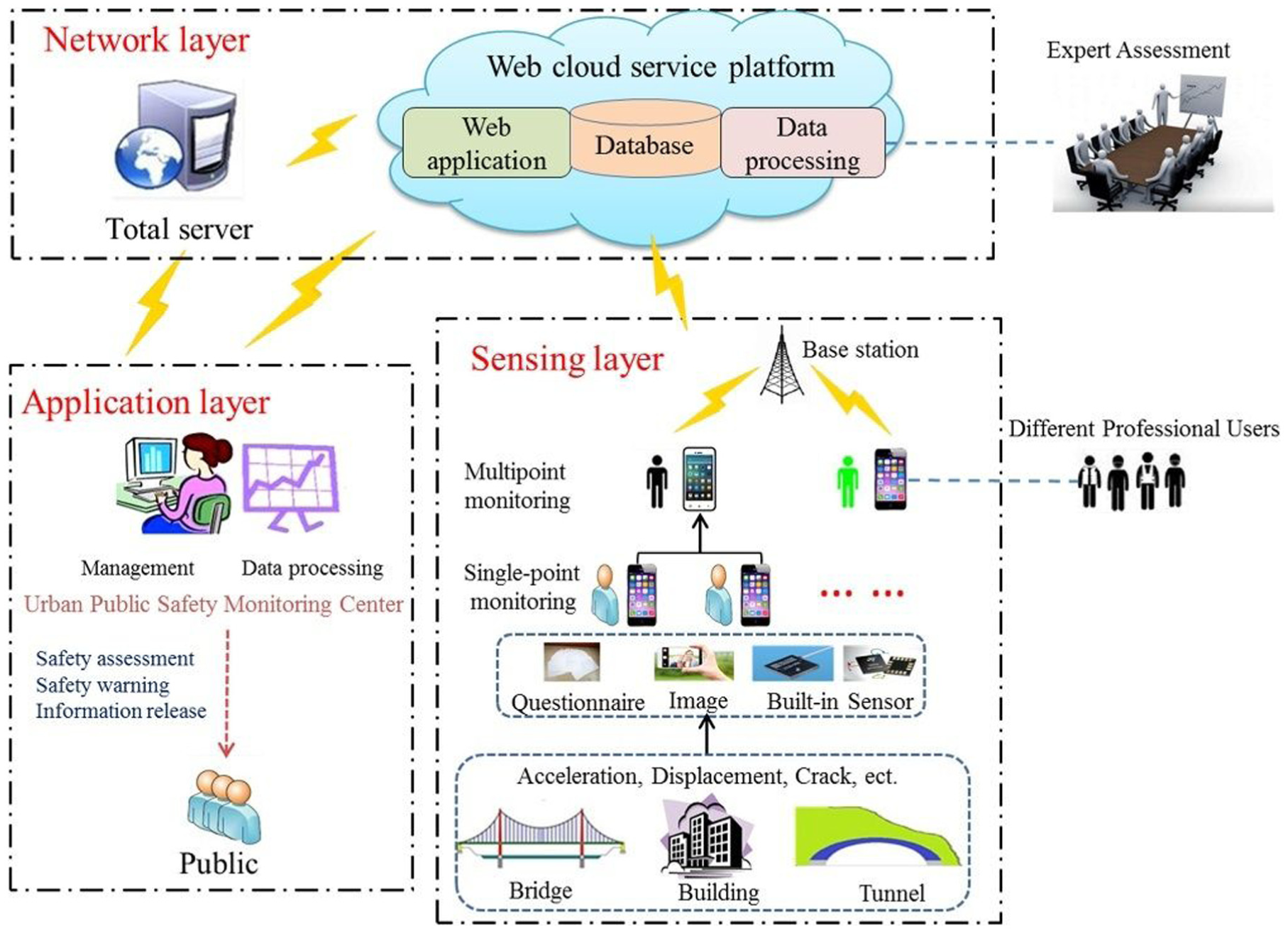
Representative study from Mobile Device-Based Sensing: architecture of the Urban Safety system through participatory sensing. 71
Non-visual data
Non-visual data collection, mostly in the form of vibration sensing, is highly practical for mobile applications. Nearly all modern smartphones are equipped with built-in accelerometers, allowing them to capture motion data when carried by users or placed near infrastructure. This type of sensing is also computationally lightweight, making it more well-suited for real-time analysis and large-scale deployments. Researchers have increasingly explored the use of smartphone-based vibration data collection through crowdsensing approaches. Several examples of such efforts are presented in the following.
Ozer and Feng 35 developed an iOS application that enabled citizens to measure structural vibrations and upload the collected data via smartphones to a central server. A web-based platform was developed to automatically process data and store results, including structural modal parameters of a bridge structure. Field tests were conducted to account for uncertainties associated with citizen-operated devices. Results showed that vibration data collected by non-expert users could still accurately identify structural modal properties, and such data could further be used to update the finite-element models. 133 Moreover, Matarazzo et al. 134 proposed using smartphones carried in vehicles to monitor bridge health conditions. The smartphones recorded vehicle vibrations as the vehicles passed the bridges. Field tests showed that the first three natural frequencies of the bridge could be reliably identified from smartphone data. The authors emphasized that smartphones carried by individuals effectively form a large-scale mobile sensor network capable of scanning city infrastructure through the daily movement of millions of people.
Another study via non-visual data was provided by Takahashi et al. 135 They proposed a road condition monitoring system called YKOB, which used smartphones worn by cyclists to detect surface irregularities. They captured acceleration signals influenced by both road conditions and cyclist motion and applied independent component analysis to separate these components. To classify road surface anomalies, they developed a wavelet-based algorithm capable of distinguishing positive, negative, convex, and concave steps. The algorithm was evaluated through 640 trials with 8 cyclists and achieved a classification accuracy of up to 0.83. While such participatory sensing applications offer significant benefits in mobilizing public involvement and enhancing data collection efficiency, they also face challenges. Its success depends largely on users’ willingness to contribute data. 136 Therefore, sustainable incentive mechanisms are crucial for encouraging participation. Additionally, specialized smartphone applications may need to be developed to guide users in collecting specific types of data effectively.
A study by Chatzimilioudis et al. 137 highlighted that smartphones enable efficient, passive data collection methods, supporting a variety of novel crowdsourcing applications. These tasks typically run in the background using built-in sensors, operating transparently without disrupting normal device use. However, this raises significant privacy concerns, as users are often unaware of what data is being collected and transmitted. Additionally, such data collection mechanisms increase energy and cellular data consumption, which are costs that fall on users. These factors create implementation challenges and underscore the need for effective incentive mechanisms to encourage participation. Furthermore, measuring individual contributions in opportunistic networks is difficult, and without proper incentives, users may be unwilling to forward data, undermining the sustainability of mobile sensing systems. 138
Satellite-Based Sensing
The use of satellites for infrastructure monitoring dates back to the end of the last century, with the development of GNSS technology in the 1990s. Satellite-Based Sensing collects infrastructure response data remotely without any physical contact 139 (also often named as remote sensing), avoiding interruptions in operation. It enables the monitoring of large areas covering multiple structures and provides access to locations where conventional methods are not feasible.140,141 Based on the measurement techniques, Satellite-Based Sensing typically encompasses three main types: GNSS, Interferometric SAR (InSAR), and Polarimetric SAR (PolSAR), which are briefly presented along with representative studies in the following paragraphs.
The principle of GNSS is to measure the precise three-dimensional positions of infrastructure using signals from multiple satellites. It is commonly employed to monitor the responses of critical points on structures. Yu et al. 142 reviewed the applications of GNSS-based positioning technologies for infrastructural health monitoring. In traditional methods such as post-processing kinematic and real-time kinematic (RTK), one or more local base stations must be established at a stable location near the monitoring target to enable baseline solutions (Figure 8(a)). 142 In more recent studies, the network-based RTK technique has been adopted, where correction data is received from continuously operating reference stations instead of locally installed base stations (Figure 8(b)). 142 GNSS-based sensing initially focused on monitoring the vibrations of towers and chimneys.143,144 It has since expanded to include the measurement of responses in high-rise buildings and large-scale bridges subjected to wind, traffic, or seismic activity. For example, Yu et al. 145 conducted RTK-based GNSS monitoring on the Wilford Suspension Bridge. Their results demonstrated that the modal frequencies of the bridge could be identified using GNSS measurements and were successfully validated against data obtained from accelerometers. Quesada-Olmo et al. 146 developed a near-real-time GNSS-based monitoring system for high-rise buildings. They used four rooftop antennas and a custom mathematical model to track horizontal displacements every 25 s with high precision. The system integrated least squares adjustment, outlier detection, and sensitivity analysis, which reduced GNSS error by up to 40%.
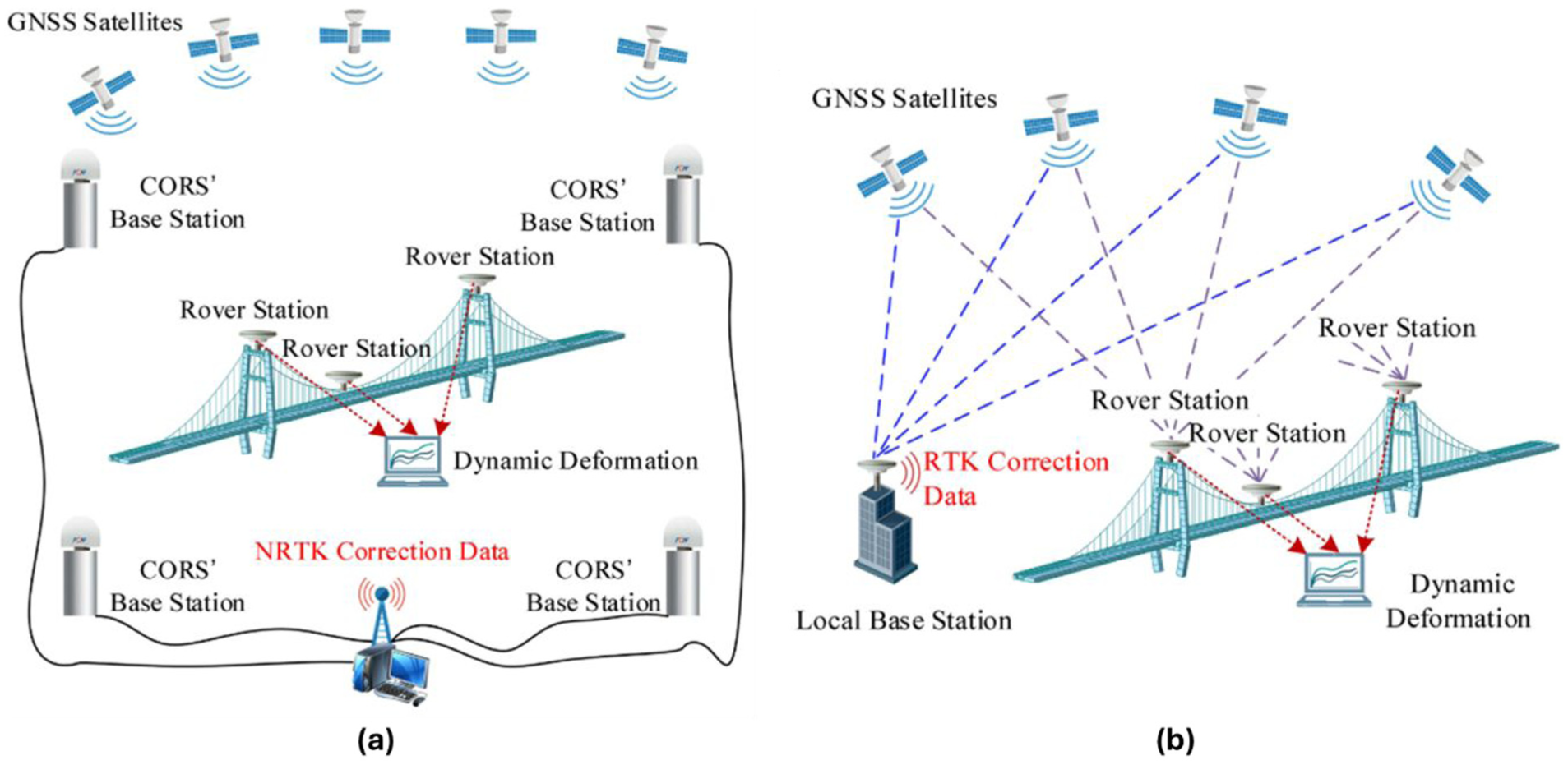
Representative study from Satellite-Based Sensing 142 : (a) GNSS measurement principle in RTK mode and (b) GNSS measurement principle in NRTK mode. GNSS: global navigation satellite system; RTK: real-time kinematic; NRTK: network-based real-time kinematic.
InSAR is a key technique in Satellite-Based Sensing (particularly emphasized more here) that enables detailed mapping of ground displacement by comparing radar signals reflected from the Earth’s surface over time. It works by generating interferograms from SAR images captured at different time points, allowing for precise measurement of surface movements, often with millimeter-scale accuracy, particularly through the identification of stable surface features known as persistent scatterers (PS). 147 When SAR data from both ascending and descending satellite orbits are analyzed, and simplifying assumptions about structural response are applied, it becomes possible to estimate deformation in both vertical and horizontal directions. InSAR is widely valued for its high accuracy, dense spatial coverage, and short revisit intervals, making it a cost-effective and near-real-time monitoring tool. The resulting measurements are used to produce velocity maps and displacement time series that support both local infrastructure assessments and large-scale geospatial monitoring.
The use of InSAR for civil infrastructure monitoring is a growing research area, with studies focusing on post-collapse analyses,49,148,149 temperature-induced deformation,37,150 and validation with ground-based measurements.151,152 As part of its operationalization, the European Space Agency recently launched the European Ground Motion Service (EGMS) under the Copernicus program. 153 EGMS processes Sentinel-1 data dating back to 2015, integrates GNSS-based calibration, and provides publicly accessible ground motion updates through an online platform. Table 1 summarizes a general workflow for Satellite-Based Sensing, with a focus on InSAR applications.
General workflow of InSAR satellite monitoring.
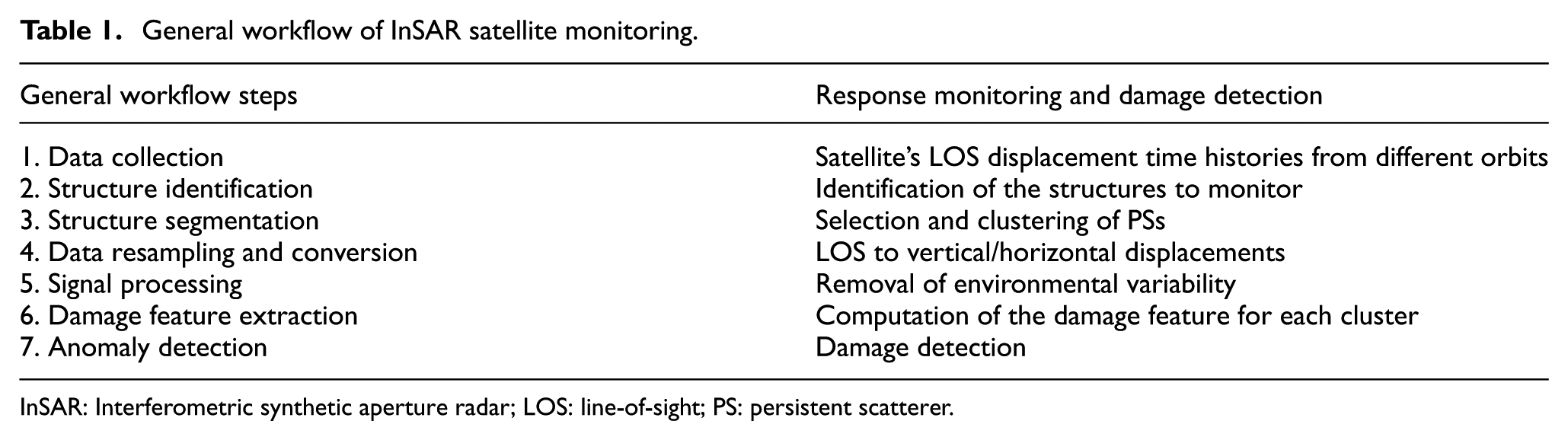
InSAR: Interferometric synthetic aperture radar; LOS: line-of-sight; PS: persistent scatterer.
InSAR’s accuracy can be affected by atmospheric disturbances that introduce delays in the radar signal that may be falsely interpreted as actual distance changes. Furthermore, spatial and temporal decorrelation causes, respectively, small changes in the satellite orbit between acquisitions and in the surface between acquisitions. To overcome these limitations, advanced Multi-Temporal InSAR (MT-InSAR) techniques have been developed, enhancing both spatial and temporal precision. 154 For example, Macchiarulo et al. 155 demonstrated that MT-InSAR can be used to extract surface displacements over time from high-resolution SAR images. This capability makes it suitable for monitoring buildings, bridges, dams, railways, and other linear infrastructures. In their study, Geographic Information Systems were leveraged to identify infrastructure locations, while InSAR images captured their displacement patterns over time. A dataset spanning 2016–2019 was used to analyze the Los Angeles highway and freeway network, validating the proposed method, as shown in Figure 9(a). Compared to traditional topographic survey methods, Differential InSAR (DInSAR) can achieve deformation measurements with centimeter- to millimeter-level precision. In another study, Giordano et al. 37 proposed a method for bridge damage detection using DInSAR data. Their approach provided reliable information on the early stages of structural damage, even under changing environmental conditions, within a time frame equivalent to roughly twice the satellite’s revisit period.
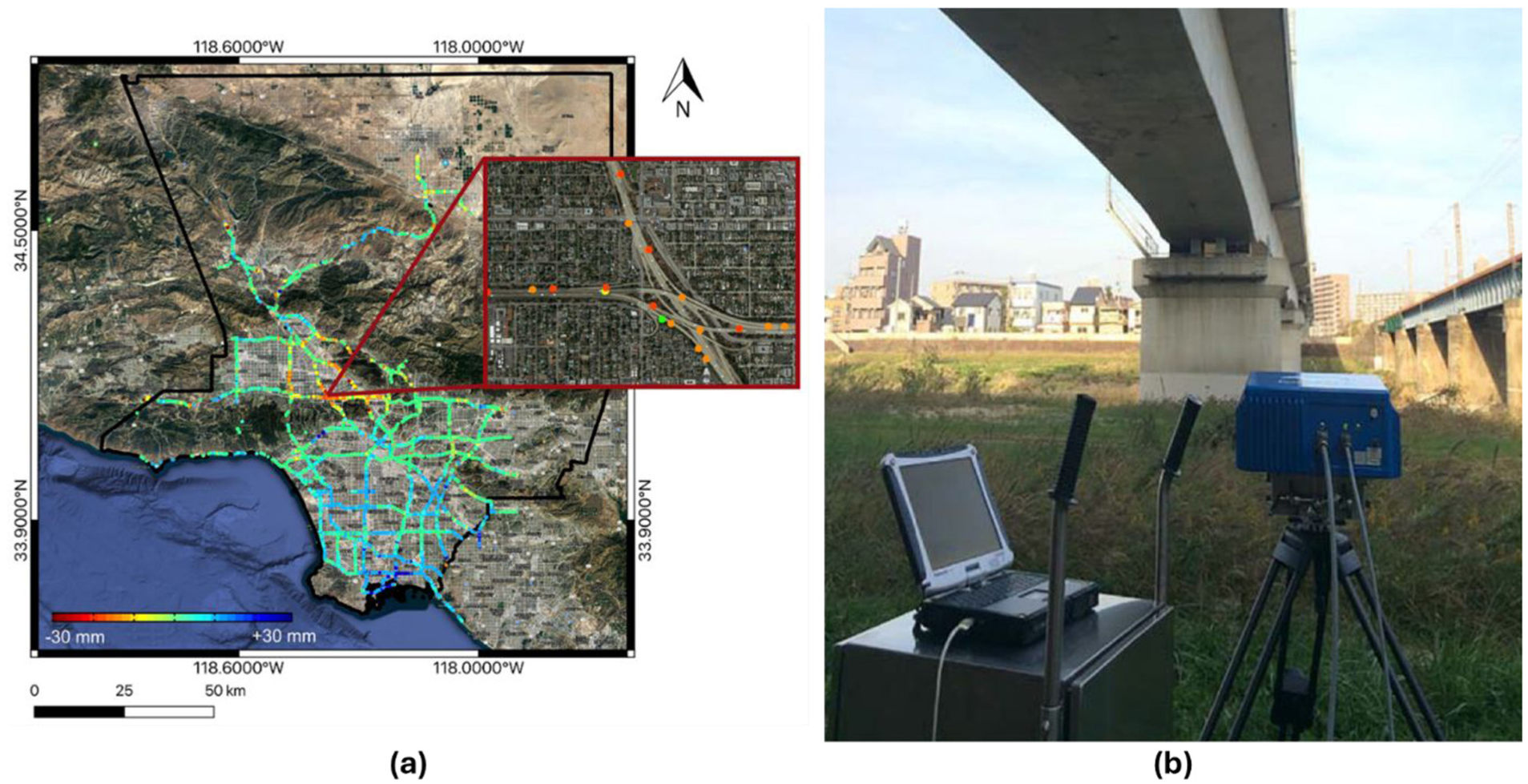
The third commonly used technique in Satellite-Based Sensing is PolSAR, which uses signal polarizations to analyze material types and surface conditions. PolSAR has been shown to enhance the extraction of information related to material composition and the geometry of scatterers within the observed area. 156 A study by Zou et al. 157 proposed a method for monitoring vertical deformation in a long-span metallic railway bridge and a reinforced concrete Shinkansen bridge (Figure 9(b)) in Japan using a polarimetric Ground-Based Real Aperture Radar (GB-RAR) system. Unlike conventional signal processing approaches, their method bypasses the step of selecting coherent scatterers. Instead, it employs polarization analysis to evaluate the properties of scatterers and identify those associated with specific bridge sections that require monitoring, considering the structural features of the bridge. Field test results demonstrated that the polarimetric GB-RAR system, combined with the proposed algorithms, offers an effective approach for monitoring bridge structures.
Satellite-Based Sensing offers an efficient approach to LIS applications. However, its reliance on remote visual measurements limits its ability to detect internal or minor structural damage. GNSS-based sensing can only monitor discrete points rather than continuous surfaces or entire structural systems. InSAR measures displacements along the line of sight. Separating vertical and horizontal displacement components requires additional modeling. PolSAR-based sensing, while valuable for analyzing material and surface conditions, is sensitive to system noise and surface variability, which may affect its reliability and hinder its broader application in engineering practice. Future research on developing new methodologies to enhance the reliability of the measurements could benefit Satellite-Based Sensing applications.
Stationary Camera-Based Sensing
Stationary Camera-Based Sensing approaches involve utilizing the pre-existing fixed systems, such as CCTV and traffic/urban surveillance cameras, together with the application of computer vision techniques, including feature matching, object detection, tracking, and instance segmentation. 68 Despite limitations in resolution and viewing angles, these stationary camera systems continuously generate visual data streams that can be repurposed as latent sources for potential infrastructure assessment when processed through suitable computational pipelines. A substantial body of research on Stationary Camera-Based Sensing exists and can be broadly categorized into three main areas based on monitoring objectives, with some representative studies discussed in the following paragraphs: (1) detection of structural damage/anomalies, which are at the local scale51,158–161; (2) identification of structural loads, which are at the global scale162–164; and (3) measurement of structural responses, which are at the global scale.40,165,166 Notably, much of this research has concentrated on bridges, just like the other LIS applications, due to their critical role in transportation networks, frequent exposure to dynamic loads, and the relative accessibility of camera viewpoints.
Starting with structural damage/anomaly detection, Li et al. 158 applied sewer inspection videos to identify common defects such as cracks and joint displacements, demonstrating how structural anomalies can be inferred from routine pipeline imagery. On the other hand, Dai et al. 159 utilized CCTV footage from boreholes to detect cracks in concrete dams to enable automated safety assessment without dedicated sensing infrastructure. Zuo et al. 160 further showed that even low-resolution CCTV streams from sewers can support detailed classification of multiple crack types through view selection and targeted segmentation. In another related study, Kumar et al. 51 developed a deep learning-based framework for automatically detecting defects in sewer pipelines using CCTV videos. Their model utilized a convolutional neural network to classify defect types frame-by-frame, achieving high accuracy even under challenging imaging conditions and contributing to scalable condition assessment of wastewater infrastructure. On a larger scale, Ramanna et al. 161 utilized street-level CCTV images to assess surface deterioration across transportation networks of North America. These studies collectively exemplify how visual data from fixed camera systems can serve as an alternative sensing modality for structural damage detection within the LIS paradigm.
The identification of structural loads leveraging stationary camera systems has also been the focus of extensive research. For example, Ge et al. 162 integrated traffic camera imagery with pavement-based WIM data to identify stochastic spatiotemporal patterns in bridge traffic loads. Their approach highlights how computer vision and geometric reconstruction can convert visual surveillance into dynamic load estimations, as illustrated in Figure 10(a). Micu et al. 163 also utilized CCTV images together with WIM records to investigate vehicle spacing and load effects under congested conditions, which provides estimates of bridge cable forces over long return periods. One other study by Xia et al. 164 applied CCTV monitoring on a footbridge to capture pedestrian-induced loads, extracting parameters such as crowd density and movement in real time using deep learning. These efforts demonstrate how existing cameras can be used to understand structural demand and operational status.
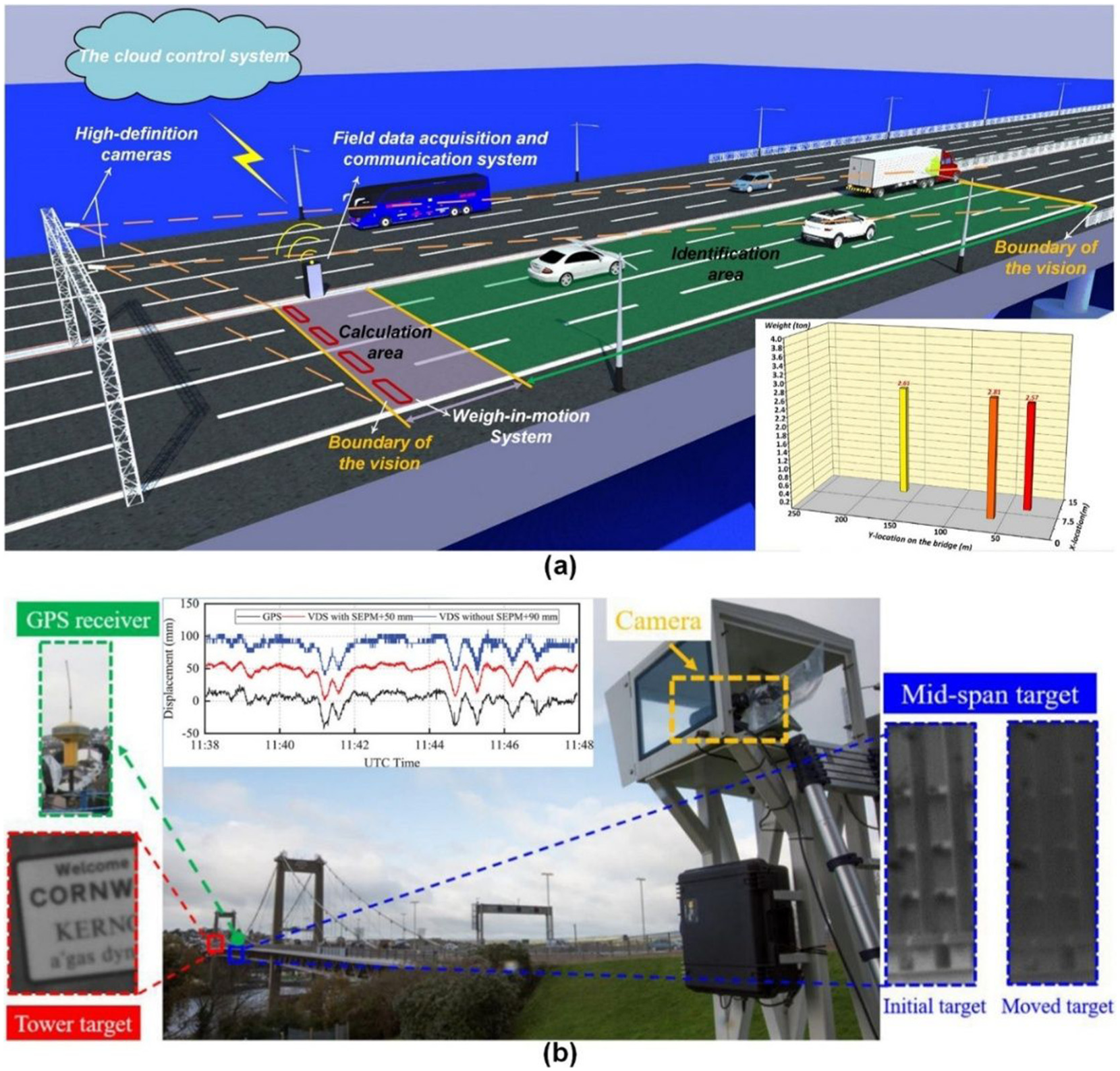
Parallel developments in Stationary Camera-Based Sensing focus on extracting structural response measurements, such as displacement or vibration, from existing video data. 167 In bridge monitoring applications, displacement at key structural locations is critical for the assessment of safety. For example, a study by Wang et al. 165 demonstrated that mid-span displacements of operating bridges can be accurately measured using CCTV-based sub-pixel tracking techniques, even under challenging lighting conditions, as shown in Figure 10(b). Lee et al., 40 on the other hand, showed that traffic camera footage could also be used to monitor cable vibrations through semantic segmentation and feature extraction, enabling cost-effective dynamic monitoring. Camara and Reyes-Aldasoro 166 further extended the dynamic monitoring paradigm by linking vehicle tracking from traffic videos to structural vibration analysis via finite element simulation. They simulated and assessed bridge vibration serviceability under conditions of high-volume vehicular traffic. Several other advanced approaches have the potential to provide deeper insights into structural dynamic behavior, with motion magnification being a prominent example.168,169 However, this technique often requires high-frame-rate cameras and a clear focus on the structural region of interest, conditions that may not be readily met or supported by existing surveillance systems.
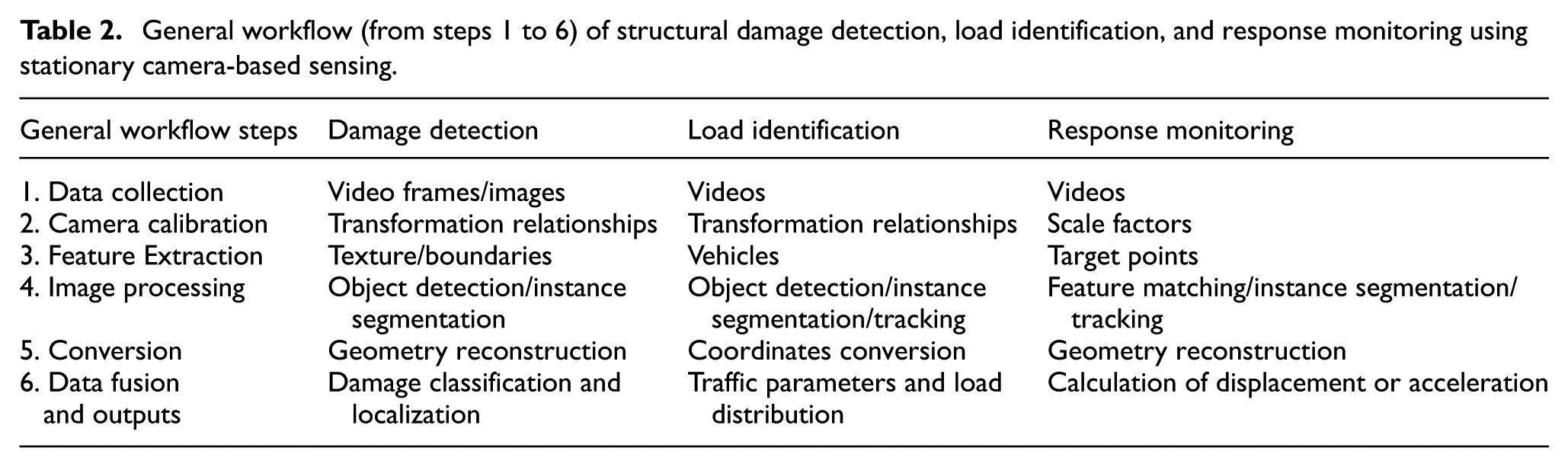
Table 2 shows a generalizable, end-to-end workflow for Stationary Camera-Based Sensing. The pipeline begins with selecting appropriate sensing configurations, followed by structured data collection, calibration, and visual feature extraction. These are then passed through specialized image processing routines tailored to the monitoring goal (e.g., damage detection, load estimation, or displacement tracking) before being transformed into actionable indicators via data fusion and conversion techniques. Finally, the outputs feed into decision-making platforms or maintenance scheduling systems aligned with decision-support objectives. The workflow for different monitoring goals varies in terms of algorithmic emphasis and feature interpretation. Specifically, response monitoring focuses on tracking displacement or velocity fields over time, often relying on precise spatiotemporal feature extraction and tracking algorithms. Damage detection, on the other hand, emphasizes the classification, localization, and quantification of various defects with less focus on tracking. Both response monitoring and damage detection require robust geometry reconstruction in physical space. In contrast, load identification highlights coordinate conversion and spatial locations of pedestrians or vehicles, which are sometimes incorporated with the weight information. 77 Each of these tasks corresponds to different stages within the LIS Intelligence Framework, spanning from data source identification to computational analysis and decision support, highlighting the modular yet integrative potential of Stationary Camera-Based Sensing. Despite these differences, these tasks benefit from advancements in computer vision and deep learning, which have significantly enhanced the precision, automation, and real-time capability of infrastructure monitoring.
General workflow (from steps 1 to 6) of structural damage detection, load identification, and response monitoring using stationary camera-based sensing.
While Stationary Camera-Based Sensing has been widely researched, there are still several challenges that need to be addressed:
Camera calibration, whether for coordinate transformation relationships or scale factors, often requires significant manual intervention in practical applications. Developing AI-based self-calibration methods and leveraging reference-free geometric inference could reduce dependency on manual steps and improve scalability.
Illumination, occlusion, and abnormal weather conditions pose significant challenges to visual tasks, including detection, segmentation, and tracking. To enhance robustness, integration of multispectral or thermal imaging, temporal data aggregation, and data-driven noise resilience strategies is recommended.
Monitoring through stationary camera systems inevitably involves protecting the privacy of the public or communities. Therefore, obtaining public camera data may be a challenge. In this regard, it is important to prevent public privacy leakage, enhance ethical and moral research, and increase public trust in visual technologies.
Lens distortion, particularly with wide-angle or fisheye lenses used in existing cameras, can also introduce geometric inaccuracies in object localization and tracking unless corrected during preprocessing.
Comparison of existing LIS applications
To discuss the relative strengths and limitations of existing LIS applications, we comparatively evaluate these four major sensing approaches (CV-Based Sensing, Mobile Device-Based Sensing, Satellite-Based Sensing, and Stationary Camera-Based Sensing) through the lens of the LIS Intelligence Framework and the REAP properties. Although several LIS modalities have been demonstrated in individual studies, performing a unified experimental comparison would require a systematic, controlled, and large-scale empirical campaign involving cross-platform deployments, standardized datasets, and consistent ground-truth SHM measurements—elements that fall beyond the scope of this work. As LIS technologies mature, more comprehensive benchmarking efforts will become possible and represent an important direction for future research. Therefore, in this article, each LIS sensing approach is evaluated by the authors in this study (nine in total) using a 1-to-3 rating scale for the quantification parameters (Table 3) associated with the four REAP properties. These scores reflect how well each method potentially aligns with the phases of the LIS Intelligence Framework (Data Source Identification, Data Processing, Computational Analysis, and Decision Support), highlighting their relative capabilities within the context of current technological maturity and infrastructure monitoring needs. The goal is not to provide absolute ratings but rather to underscore the comparative advantages and trade-offs at a high level among LIS applications, considering their integration potential and performance across the full infrastructure monitoring pipeline. The following paragraphs provide a general overview of the rationale for selecting these ratings for each LIS modality.
Relative rating of major LIS applications based on the REAP properties.
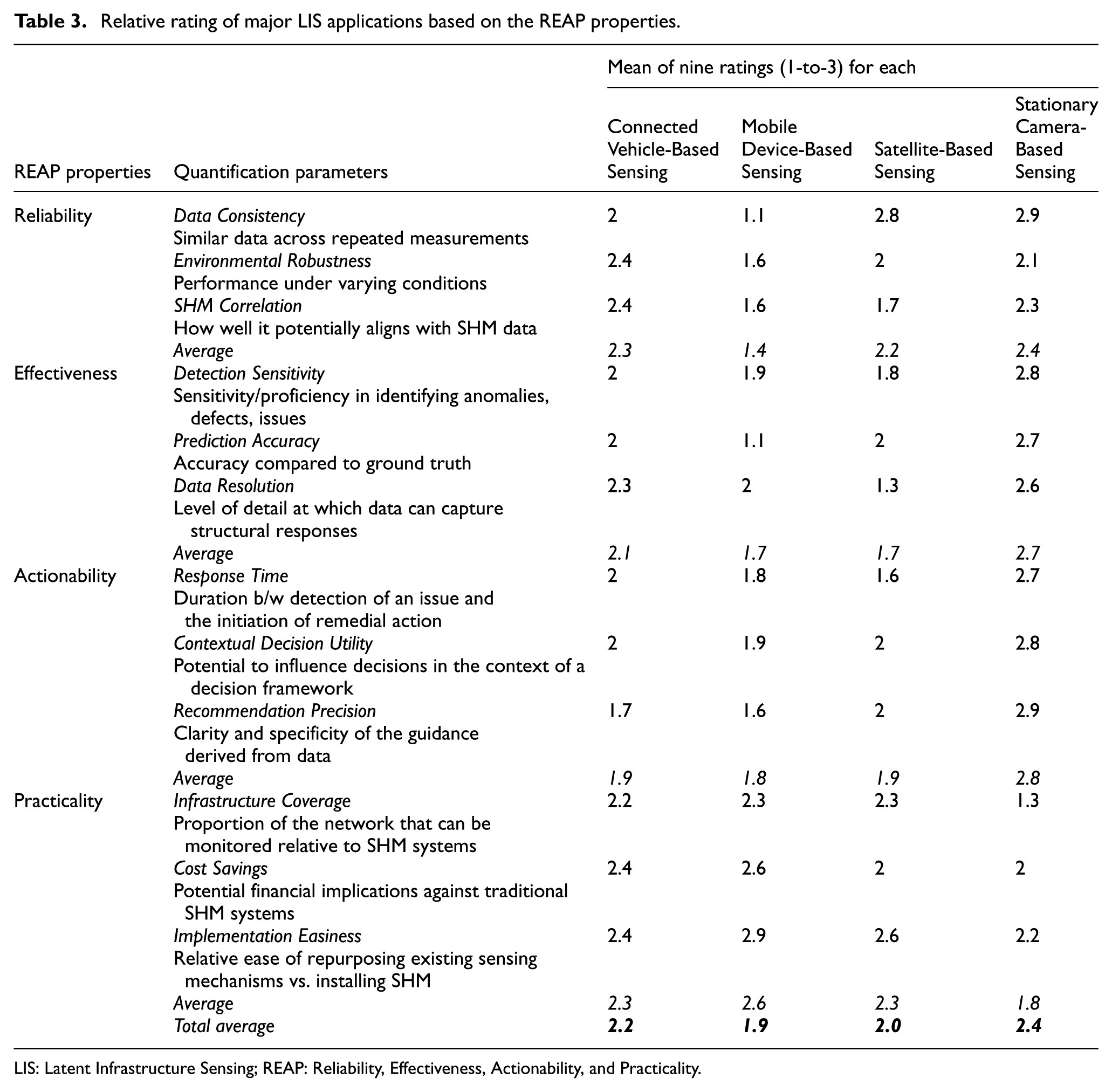
LIS: Latent Infrastructure Sensing; REAP: Reliability, Effectiveness, Actionability, and Practicality.
Based on the ratings in Table 3, CV-Based Sensing shows a well-rounded performance across the REAP properties, with particularly strong practicality and reliability. The repeated traversal of the same routes by sensor-equipped vehicles helps to average out noise and produce moderately consistent data, especially for bridge vibration and road roughness metrics. Its effectiveness is average, as CVs have been shown to identify bridge frequencies and road surface anomalies, although variations in vehicle type, suspension, and speed still introduce complexities that impact prediction accuracy and resolution. These challenges, however, can be mitigated through aggregation over time via repeated data collection. In terms of actionability, downstream decision-making based on CV data is highly likely to depend on follow-up inspections and analysis. CV data can be relatively less specific and interpretable in terms of actionability and require contextual supporting data. Practicality of CV-Based Sensing is relatively high due to the widespread presence of onboard sensors and the feasibility of passive data collection, although limitations in data-sharing standards and fleet penetration can affect scalability.
Mobile Device-Based Sensing stands out for its high practicality. With no new hardware required, smartphones and wearable devices offer immediate scalability and low-cost sensing, simply by repurposing the sensors users already carry. However, this ease comes at the expense of reliability and effectiveness. Data consistency is relatively low due to varied hardware, sensor sampling rates, and how users carry or move their devices, which also limits the alignment of mobile data with structural behaviors typically monitored in SHM. Effectiveness is also low due to the uncontrolled sensing environment and difficulty in distinguishing infrastructure condition inherent data from noise. Actionability receives a relatively low to mediocre score. While user-generated data can indicate issues, it can lack the contextual precision or reliability to support immediate, accurate engineering decisions. Nevertheless, the low barrier to implementation and potential for crowd coverage make it an attractive supplementary modality.
Satellite-Based Sensing is rated average-high in reliability due to rigorous calibration, predictable revisit cycles, and global coverage. While cloud cover and atmosphere can hinder optical imagery, radar-based satellite systems can offer more consistent coverage in variable conditions. Its effectiveness, however, is roughly average. Radar satellites can detect millimeter-level displacements over large areas, but their spatial resolution and sensitivity may fall short (especially for free data providers like Sentinel-1) in identifying localized structural issues like cracks or spalling. In terms of actionability, satellites generally lag due to revisit intervals and processing time, although commercial data providers can offer more rapid responses. On the other hand, practicality is high as there is no need for physical installations and can monitor vast regions uniformly; however, depending on the context, the need for finer resolution data comes with higher monitoring costs, and interpreting satellite data requires specialized tools and expertise, which can raise the barrier to entry for widespread adoption in infrastructure monitoring.
Stationary Camera-Based Sensing is rated high in reliability, effectiveness, and actionability due to its ability to deliver high-resolution, repeatable visual data from fixed viewpoints. Cameras are particularly strong in detecting visible structural changes, such as cracks, spalling, and deflection, providing sub-millimeter precision through advanced computer vision algorithms. Computer vision methods have been particularly well-studied in infrastructure assessment literature. However, the data can be susceptible to occlusion (e.g., traffic), lighting changes, and weather conditions (e.g., rain). On the other hand, their outputs are more directly interpretable, enabling rapid decision-making and clear, actionable insights for infrastructure operators. However, practicality is where this method encounters limitations due to limited infrastructure coverage. It is because these camera systems (e.g., CCTV) are inherently restricted to fixed installation points, which may miss the view of critical components of large, complex structures.
In general, each LIS modality has inherent measurement limitations that constrain its most suitable applications. For example, CV-Based Sensing is affected by variations in vehicle suspension systems, driving conditions, tyre pressure, speed fluctuations, and environmental noise, limiting its precision for high-frequency modal identification but making it suitable for long-term trend detection and network-level screening. Mobile Device–Based Sensing suffers from inconsistent device orientation, heterogeneous hardware sampling rates, user motion artifacts, and low signal-to-noise ratios, restricting its use to coarse anomaly detection or crowdsourced inference. Satellite-Based Sensing offers millimeter-scale deformation tracking but is constrained by revisit intervals, atmospheric effects, and limited ability to capture high-frequency dynamic responses, making it most suitable for long-term settlement, subsidence, and deflection monitoring. Stationary Camera–Based Sensing enables high-resolution displacement or crack measurement but depends heavily on line-of-sight visibility, stable installation, consistent lighting, and minimal occlusion.
Despite these modality-specific limitations, each LIS approach offers unique and complementary strengths, making their combined use far more effective than relying on any single modality. A practical integration strategy can follow a layered workflow within the “hybrid monitoring approach,” as described in “Advances in SHM and Positioning of LIS” section and illustrated in Figure 2. Routine periodic inspections (TIS) provide relatively higher-fidelity assessments that act as calibration points. Between these intervals, LIS modalities operate continuously. At the network scale, CV- and mobile device–based data offer broad, high-level, and frequent coverage for screening anomalies or emerging trends. When these coarse indicators suggest potential structural issues, targeted refinement can be performed using higher-resolution modalities such as stationary camera–based (when suitable fixed-view coverage exists) or satellite-based measurements that capture deformation or visual evidence at finer spatial resolution. If these LIS data remain insufficient, a special (unscheduled) in-person inspection (similar to special inspections in current practice 170 ) can be initiated to obtain detailed, low-level structural condition information. In practice, such integration may follow a trigger-based and confidence-informed workflow, in which broad-coverage LIS modalities support initial screening, higher-resolution modalities are used for targeted verification, and conflicting or complementary observations are interpreted based on spatial scale, temporal frequency, measurement fidelity, and uncertainty level. This layered integration allows LIS modalities to collectively overcome the limitations of individual technologies while supporting timely and informed decision-making. At present, however, such hybrid multi-modality LIS workflows remain largely conceptual, as sufficiently established real-world demonstrations of simultaneous LIS integration across modalities are still limited in the literature.
Limitations and uncertainty
It is important to emphasize that uncertainty remains a cross-cutting challenge in LIS because the repurposed data are not originally collected for infrastructure health monitoring. As a result, the extracted structural information is often indirect, mixed with non-structural influences, and affected by measurement conditions that are not fully controlled. These uncertainties may arise from environmental variability, operational conditions, sensor heterogeneity, incomplete spatial or temporal coverage, and errors introduced during data acquisition, transmission, processing, and interpretation. In many cases, the measured signal contains only a partial or distorted representation of the true structural response, making it difficult to separate infrastructure-related behavior from confounding effects. Consequently, LIS outputs should often be interpreted as condition indicators or screening-level evidence rather than direct or absolute measures of structural state. This also means that uncertainty can propagate through the full LIS Intelligence Framework, from raw data collection to feature extraction, computational analysis, and final decision support. For LIS to become more robust and actionable in practice, future research should place greater emphasis on uncertainty quantification, sensitivity analysis, confidence estimation, and systematic validation against ground truth, inspections, and SHM-based measurements.
Emerging and potential future applications in LIS
This section proposes some of the emerging and potential future applications of LIS from a broader perspective. These approaches leverage rapidly evolving urban technologies that, while originally designed for non-structural purposes, inherently generate valuable data streams.
Emerging LIS applications: Telecom Cable-Based Sensing
Telecom Cable-Based Sensing has recently emerged as a novel research direction, repurposing conventional fiber-optic cables (originally used for data transmission) into dense, distributed sensor arrays capable of detecting structural and environmental dynamics. This emerging approach leverages distributed acoustic sensing (DAS) to transform pre-existing telecom fiber networks into high-resolution dynamic strain sensors capable of capturing structural vibrations and seismic signals.
A DAS system consists of a laser interrogator and a standard optical fiber. The interrogator emits laser pulses into the fiber and measures the Rayleigh backscattered light caused by microscopic inhomogeneities in the fiber core. 171 By analyzing the optical phase changes between the transmitted and backscattered pulses, DAS retrieves dynamic strain or strain rate along the fiber with meter-scale spatial resolution and kilohertz sampling rates. 172 This enables the deployment of tens of thousands of virtual sensors over tens of kilometers of cable, 173 which is orders of magnitude more dense and scalable than conventional point sensors such as geophones, fiber Bragg gratings, or accelerometers.
The use of pre-existing telecom fiber infrastructure presents a unique opportunity to monitor civil systems at scale and low cost. Globally, millions of kilometers of fiber-optic cables are already deployed, often collocated with critical infrastructure such as highways, railways, bridges, and powerlines.52,174 For example, fiber is commonly routed across bridges through protective conduits or buried alongside transportation corridors to support communication and control. These embedded fibers naturally capture the dynamic response of nearby structures and subsurface environments,175,176 offering insights into vibration characteristics, degradation, and other damage-sensitive features. This sensing capability opens new avenues for continuous infrastructure diagnostics, including serviceability assessment, damage localization, and early warning.
Recent studies have demonstrated the effectiveness of Telecom Cable-Based Sensing of infrastructures, particularly for bridges. For example, Liu et al. 43 developed a system, as shown in Figure 11, that uses telecom fiber to estimate bridge modal properties, including natural frequencies and mode shapes, using a physics-guided identification approach. Their method achieved over 99% accuracy in frequency estimation and over 96% in displacement mode shapes when validated against accelerometer data. In a more recent study, Rodet et al. 177 monitored five bridges across a 24-km urban fiber network in Lyon, France, successfully capturing modal dynamics and revealing daily cycles in natural frequencies, likely tied to temperature-induced stiffness changes. Beyond modal analysis, telecom cable-based sensing has also enabled the observation of propagating guided waves. Liu et al. 178 observed low-frequency Lamb waves in box girder bridges using ambient traffic vibrations and noise interferometry. The observed dispersion patterns matched well with numerical models, showing the promise of DAS for waveform-based diagnostics at scale.
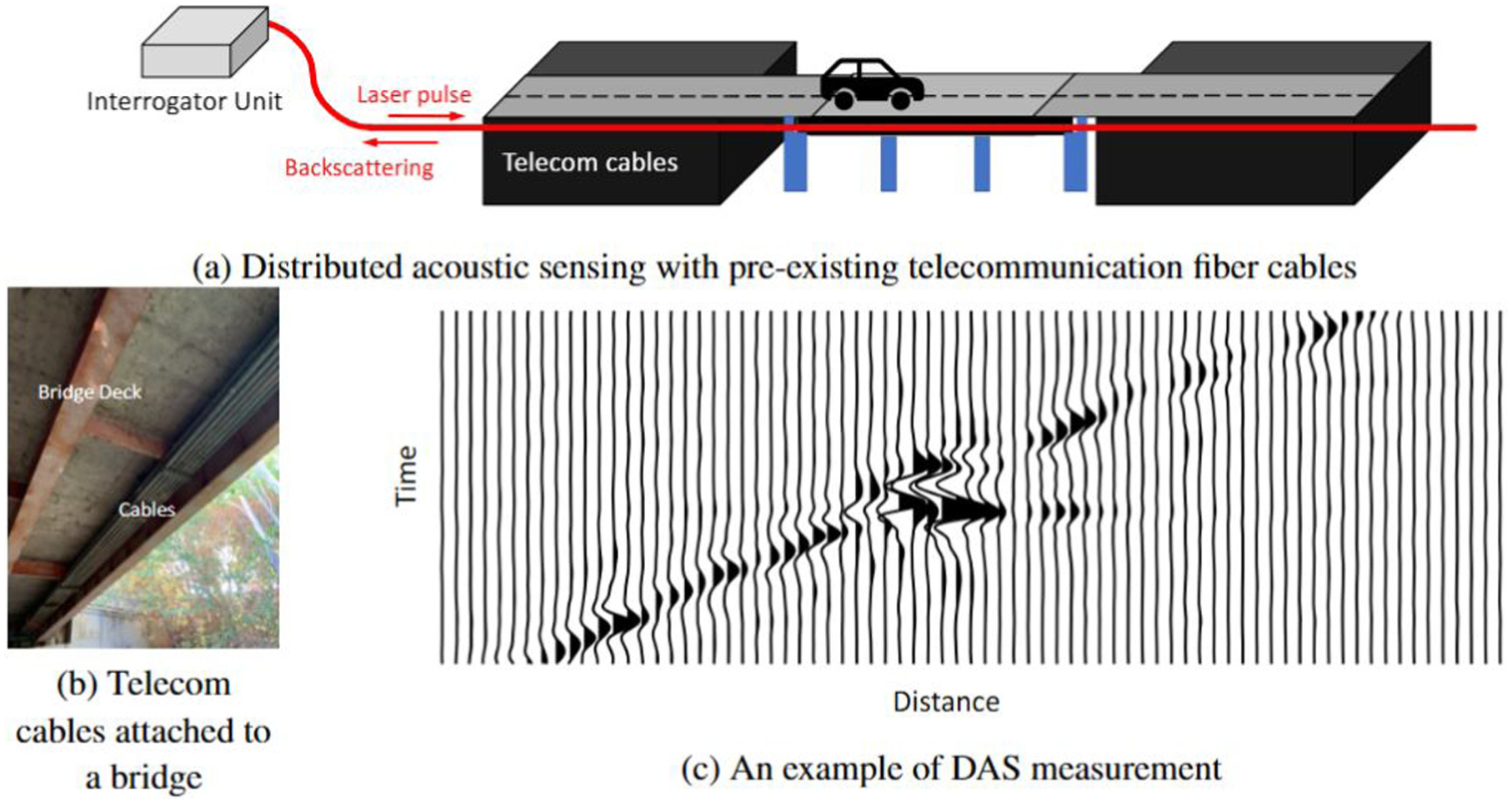
Representative study from Telecom Cable-Based Sensing 43: (a) schematic of a DAS system using pre 1000 existing telecom fiber-optic cables installed along a bridge, where the interrogator unit sends laser pulses through the 1001 fiber and records Rayleigh backscattered signals to measure dynamic strain; (b) example of telecom cables attached 1002 to the underside of a bridge deck; and (c) representative DAS measurement showing strain over time and distance, 1003 capturing vehicle-induced vibrations traveling along the bridge. DAS: distributed acoustic sensing.
One critical challenge in Telecom Cable-Based Sensing is the accurate localization and characterization of the fiber itself; unlike dedicated, calibrated sensing fibers, pre-existing telecom cables were not designed for vibration or seismic measurements. As a result, variability in fiber composition, cladding, installation geometry, and coupling conditions introduces spatial heterogeneity in directional sensitivity and amplitude response. 179 These inconsistencies can significantly degrade data quality and complicate signal interpretation across DAS arrays. Compounding this issue, the non-dedicated nature of telecom fibers introduces challenges in data analysis: telecom DAS systems record a complex mixture of uncontrolled ambient vibrations, such as from traffic, pedestrians, or weather, leading to complex, noisy datasets that differ from the cleaner signals captured by purpose-built systems. The vast data volumes produced also demand scalable processing pipelines and robust signal processing techniques to extract meaningful structural information. To this end, recent efforts, such as those using GPS-equipped vehicles to geolocate and characterize buried fibers,180,181 have advanced our understanding of fiber layout. In the future, a systematic framework to assess the sensing quality of telecom fibers is necessary. Ideally, such a framework would evaluate key metrics, such as signal-to-noise ratio, polarization sensitivity, and coupling effectiveness, while benchmarking sensor performance over time and across varying source types. Such studies will improve the robustness and reliability of telecom cable-based infrastructure monitoring at the city scale.
Future LIS applications
We anticipate that several other approaches may enable future applications within the LIS domain. Among the most promising directions are Delivery Robot-Based Sensing, EV-Charging Road-Based Sensing, and Smart Home Device-Based Sensing. Each of these modalities offers unique opportunities to extract meaningful insights about infrastructure health using data streams that are already being generated for other purposes. These concepts are explored in more detail in the following paragraphs.
Delivery Robot-Based Sensing
Delivery robots, which encompass both unmanned ground vehicles (UGVs) and UAVs or drones, represent a promising and scalable sensing modality in LIS. These autonomous systems are increasingly deployed across urban and suburban areas for logistics and package delivery (Figure 12). While their primary function is to transport goods, these robots are typically equipped with a suite of onboard sensors, including IMUs, wheel encoders, cameras (e.g., RGB, infrared), LiDAR, and GPS, that continuously collect data as they navigate their environments. As delivery robots move along their designated routes, they opportunistically capture rich, multi-modal data streams, including vibration signatures, visual imagery, depth maps, and trajectory adjustments. Although originally intended for localization, obstacle avoidance, and path planning, this latent data can be repurposed to assess surrounding infrastructure conditions. For instance, UGVs, due to their physical interaction with ground surfaces, can detect surface roughness and localized structural inconsistencies while also capturing visual records of adjacent infrastructure. Meanwhile, UAVs expand the sensing horizon through aerial perspectives, enabling the monitoring of rooftops, façades, and other elevated structural elements. Routine package delivery missions involving these robots can be strategically leveraged to enable scalable, cost-effective, and passive infrastructure monitoring. This could transform everyday operations into a continuous opportunity for city-wide health assessment across a diverse range of built-environment components.
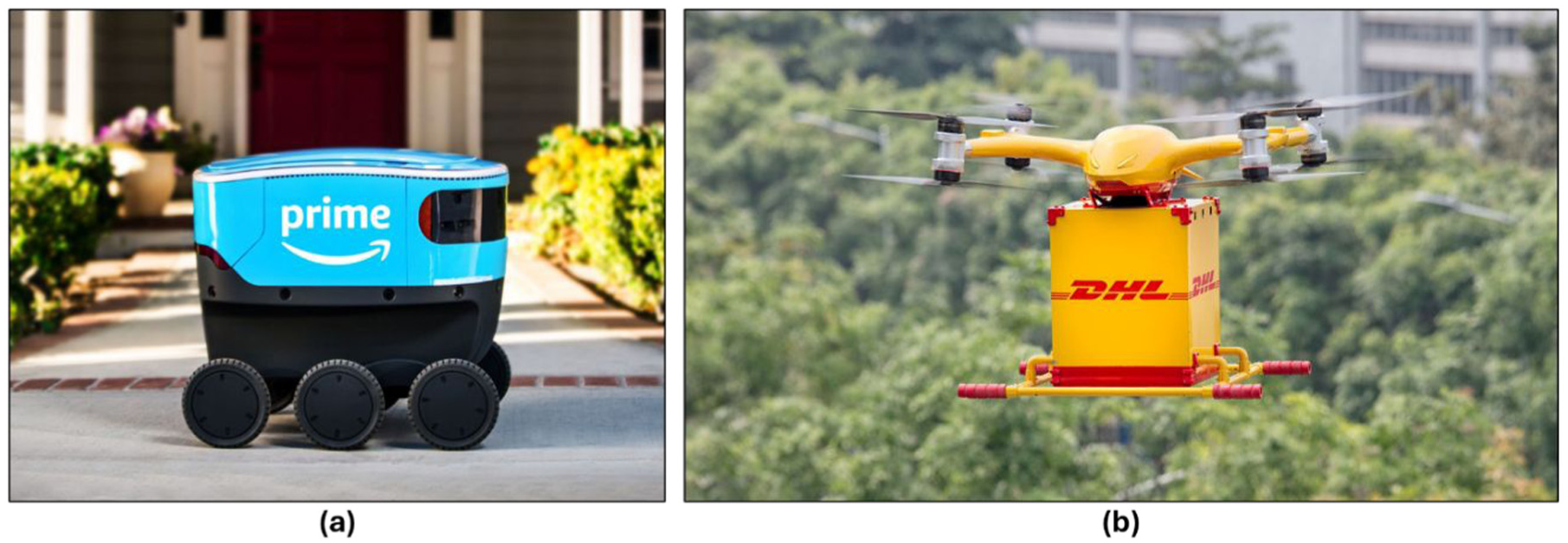
EV-Charging Road-Based Sensing
The growing deployment of in-road electric vehicle (EV) charging systems (Figure 13), particularly those that enable wireless charging, presents a promising future direction for LIS. These systems, embedded within the pavement, are designed to transfer power to EVs either while stationary or in motion. To ensure safe and efficient energy transfer, they rely on a range of sensors that monitor vehicle alignment, charging efficiency, thermal output, and load response. These sensors, although originally intended for operational control, generate valuable latent data that can be repurposed to monitor and assess the condition of the pavement infrastructure itself. Changes in energy transfer performance, charging misalignment patterns, or unusual temperature fluctuations can indicate underlying issues such as pavement surface deformation, insulation degradation, material fatigue, and/or subsurface voids. Over time, repeated observations during charging events can reveal degradation trends, allowing for the early detection of wear before it becomes critical. In addition, thermal buildup from embedded components may expose zones of inefficient heat dissipation, which could correlate with changes in pavement composition or structural integrity. EV-Charging Road-Based Sensing has the potential to offer a passive, localized, and high-frequency means of assessing pavement conditions embedded directly into the infrastructure. As EV infrastructure continues to expand across urban and highway networks, this sensing approach holds great promise for enhancing the durability and safety of roadways.

EV-charging wireless roads: (a) an example roadway 184 and (b) in-road wireless charging setup. EV: electric vehicle.
Smart Home Device-Based Sensing
The widespread adoption of smart devices in residential, commercial, and institutional buildings introduces a novel opportunity for LIS, particularly through the collection of vibration data. Many modern smart devices, such as smart security systems, appliance-integrated accelerometers, and other smart home devices like Google Nest, Amazon Echo, Apple HomePod, or even personal home robots like Samsung Ballie, are equipped with the ability to detect subtle movements and vibrations as part of their operational function. While originally designed for occupancy detection, intruder alerts, and/or user interaction, this vibration data can be repurposed to assess the structural condition of buildings. Vibration signals collected over time can reveal dynamic responses of key structural elements such as floors, walls, and ceilings, offering insights into potential material degradation, foundation shifts, or slab deflection. These variations in structural response may not be detectable through conventional usage data, but they can manifest as changes in frequency content, amplitude, or signal consistency, as captured by the devices. When vibration data is aggregated across multiple devices or units, it enables scalable, building-level, or even neighborhood-level insights into infrastructure health trends. This type of smart device-based sensing may introduce a cost-effective, non-intrusive, and already deployed solution for continuous structural monitoring, extending SHM capabilities into private spaces without requiring additional instrumentation (Figure 14).
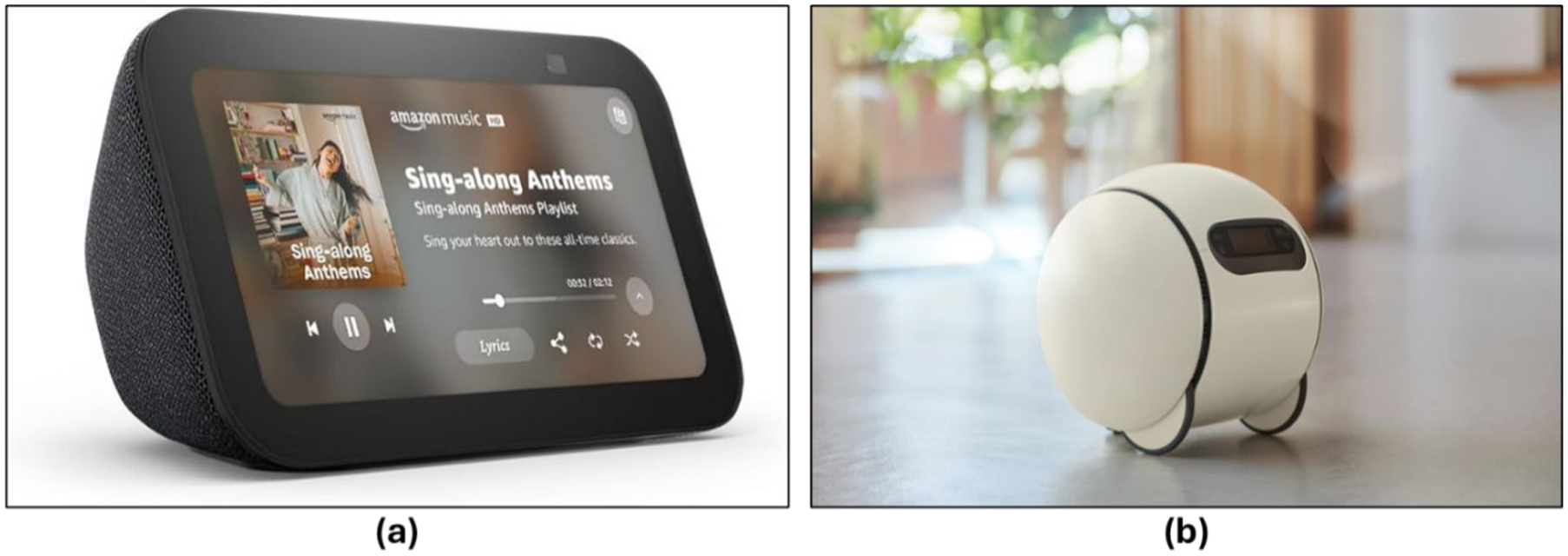
Smart home devices: (a) Amazon Echo and (b) Samsung Ballie.
Conclusions and some remarks
This article introduced and formalized the concept of LIS, a novel and rapidly emerging domain that leverages existing urban sensing mechanisms to monitor and assess the health of civil infrastructure. Situated within the broader research agendas of S&CC and ISP, LIS extends these initiatives by turning everyday urban data streams into actionable intelligence for civil infrastructure resilience. LIS capitalizes on the latent data generated for other operational purposes, data that, when properly extracted, processed, and analyzed, can provide valuable insights into infrastructure conditions.
The article first defined LIS and discussed it within the broader SHM landscape. To define the scientific rigor and practical viability of LIS, REAP properties were presented. Then, the LIS Intelligence Framework outlined how raw latent data progresses through various stages to become actionable intelligence. Representative LIS applications were reviewed and relatively compared, including CV-Based Sensing, Mobile Device-Based Sensing, Satellite-Based Sensing, and Stationary Camera-Based Sensing. We also proposed a few emerging and promising future directions.
While LIS offers a scalable, cost-effective, and innovative complementary approach to traditional monitoring, several key challenges must be addressed before it can be fully operationalized for routine infrastructure-asset management. Top among these is data accessibility. Because LIS relies on sensing mechanisms not intended for infrastructure monitoring, securing data streams from crowdsourced wearable and smartphone sensors, as well as feeds held by infrastructure owners, utilities, municipalities, vendors, and private firms, can be challenging.
Integrating LIS into day-to-day practice, therefore, demands data pipelines that are streamlined, standardized, and vendor-friendly; without reliable and appropriately governed access, the development, validation, and broad adoption of LIS solutions will remain limited. In practice, such standardization should include common metadata structures for sensor type, units, sampling rate, timestamp synchronization, geospatial referencing, quality-control flags, and uncertainty descriptors, together with clearer distinctions between raw and processed data products.
Likewise, effective LIS deployment will require data-sharing frameworks that define ownership, custodianship, permitted uses, privacy safeguards, cybersecurity responsibilities, retention periods, and liability across public and private stakeholders. Although a full governance framework is beyond the scope of this article, these elements are important for enabling interoperable, scalable, and trustworthy LIS implementation. Future LIS implementation would also benefit from interoperable sensor-data standards and template data-sharing agreements for public–private partnerships to support broader, more consistent, and scalable adoption.
Equally important is building win-win incentives for data sharing and investigating value-adding mechanisms that motivate individuals, utilities, and private companies to release their latent data streams for the collective benefit of safer, more resilient infrastructure. In parallel, ethical and privacy considerations, particularly in approaches involving mobile devices, surveillance systems, and smart home technologies, must be proactively addressed. Responsible LIS deployment requires robust safeguards, including data anonymization, informed user consent, and secure data handling practices. Through transparency and public trust, LIS can be sustainably adopted at scale. Some of the key conclusions of this article are listed below:
LIS is a viable and practically promising domain that offers a complementary monitoring solution within a hybrid infrastructure monitoring strategy, which enhances SHM applications by repurposing data from pre-existing urban sensing systems for broader, scalable, and cost-effective infrastructure condition monitoring.
The REAP properties and LIS Intelligence Framework provide a structured and scalable basis for evaluating and implementing LIS approaches.
A range of LIS early applications exists across transportation, urban sensing, and surveillance systems, with several underexplored opportunities showing strong potential.
The comparative evaluation demonstrates that no single LIS category excels across all dimensions. However, the strategic integration of these modalities can potentially offer a holistic infrastructure monitoring approach.
Several recommendations emerge from this study, together forming a roadmap for translating LIS from more concept to practice across diverse civil infrastructure systems:
Create transparent data-governance frameworks. Clearly define data ownership, liability, custodianship, and tiered access rights (raw vs. derived) for asset owners, operators, engineers, technology vendors, researchers, and the public.
Build win-win incentives for data sharing. Investigate value-adding mechanisms that motivate individuals, utilities, and private firms to contribute latent data streams.
Forge domain-aligned partnerships. Establish collaboration among infrastructure owners, regulators, tech providers, and end users to align LIS capabilities with real-world needs and accelerate adoption.
Standardize latent-data pipelines. Develop shared protocols for extracting, cleaning, and processing latent signals to ensure data quality, consistency, and comparability across projects and sectors.
Embed privacy and ethics by design. Incorporate consent, robust anonymization, and secure-sharing practices at every stage of data collection and use, and
Advance computational frontiers. Develop and refine methods and algorithms for latent data fusion, analysis, and interpretation, and actively explore underutilized sensing modalities in both urban and industrial contexts.
Footnotes
Acknowledgements
The views and opinions expressed in this article are those of the authors and do not necessarily reflect the views or positions of any entities.
ORCID iDs
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: Partial support from UCF MAPS—Mobile Assessment for Civil Infrastructure Preservation using SHM and Building Information Modeling (BIM) Project; UCF CECS Equipment Funds; Lockheed Martin St. Laurent Professorship, and finally the University of Central Florida Preeminent Postdoctoral Program (P3). The first and last authors greatly appreciate the support above.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.