
Abstract
Gear crack is one of the most common and challenging fault modes in gearboxes. Accurate identification of its severity is critical for predictive maintenance and operational safety. However, the crack-induced impulsive component (CIIC) is typically very weak and difficult to extract from vibration signals. While adaptive harmonic decomposition (AHD) is a promising technique for extracting the CIIC from vibration signals, its diagnostic performance is fundamentally limited by a key bottleneck: the two core parameters, namely the harmonic intensity regulation parameter and the bandwidth constraint parameter, have to be determined empirically. This reliance on manual parameter tuning not only introduces subjectivity and inefficiency but also severely restricts the adaptability and reliability of AHD. To overcome this limitation, this article proposes an Improved AHD (IAHD) framework optimized by a novel hybrid metaheuristic algorithm. The proposed optimizer integrates the adaptive step-size mechanism into the Rüppell’s Fox Optimizer to achieve a balanced and efficient search for the optimal AHD parameters. The CIIC extracted by this adaptive framework is then fed into a convolutional neural network for crack severity assessment. Validation on both simulated and experimental gear crack signals shows that the IAHD achieves an assessment accuracy of 95%, significantly outperforming the conventional AHD method, which yields only an assessment accuracy lower than 70%. The results demonstrate that the proposed IAHD method successfully eliminates empirical parameter dependency, enabling automatic and superior feature representation for highly accurate gear crack severity assessment.
Keywords
Introduction
Gears are indispensable core components in rotating machinery, serving as critical transmission elements in various mechanical systems such as aerospace engines, industrial drives, and automotive powertrains.1–3 During long-term operations, especially under harsh conditions like those in helicopter transmissions, gears are highly susceptible to tooth root cracks due to cyclic heavy loads and localized contact stress.4,5 If undetected, these cracks can lead to catastrophic transmission system failure, resulting in significant equipment damage and serious safety incidents.6–9 When a gear tooth crack occurs, it induces periodic impulses in the vibration signal. However, these impulsive signatures are often weak and can be significantly distorted when multiple cracks coexist, further increasing the complexity of signal analysis. 10 Therefore, a common diagnostic approach is to first process the gear vibration signal using signal processing methods to extract the crack-induced impulsive component (CIIC). Subsequently, machine learning algorithms can be employed to analyze this extracted component and identify the severity level of the gear crack.
Since the CIIC caused by gear cracks is typically very weak, researchers have proposed numerous signal analysis methods in recent years to extract these subtle features. The classical approach, resonance demodulation, isolates the resonance band where fault-induced impulses are concentrated and subsequently employs envelope demodulation to extract diagnostic features.11,12 While it excels at highlighting periodic impulses from faults such as cracks or wear, its efficacy is highly contingent on the precise localization of the resonance band—a task that becomes exceptionally challenging under complex operating conditions. To address this limitation, methods like Spectral Kurtosis (SK) have been developed.13,14 As a statistical indicator of signal non-Gaussianity, SK quantifies the “impulsiveness” of vibration signals, enabling the adaptive identification of optimal resonance bands without prior knowledge. Although enhanced variants have improved computational efficiency, these methods remain susceptible to interference from non-fault transients prevalent in industrial environments. Concurrently, advancements in adaptive signal decomposition have offered powerful alternatives. Empirical mode decomposition (EMD), an adaptive time-frequency analysis method, decomposes non-stationary signals into a set of intrinsic mode functions (IMFs) based on their local characteristics. It is well-suited for processing nonlinear fault signals but suffers from inherent limitations such as mode mixing and endpoint effects, which can distort fault-related components.15–19 To mitigate EMD’s mode mixing issue, ensemble empirical mode decomposition (EEMD) 20 was proposed by adding Gaussian white noise with controlled amplitudes to the original signal before multiple decompositions. The statistical averaging of repeated decomposition results suppresses mode mixing by leveraging the uniform distribution of noise across different scales, preserving more authentic fault features. However, EEMD still faces drawbacks such as residual noise in IMFs and high computational complexity due to multiple iterations. 21 A more refined variant, Complete EEMD with adaptive noise (CEEMDAN), 22 further optimizes the process by adaptively adding noise and completing decomposition in a single iteration, achieving cleaner IMF separation and lower computational cost. Yet, its performance in extracting ultra-weak impulses remains constrained when confronted with intense background noise in industrial settings. Subsequently, variational mode decomposition (VMD) was proposed. In contrast, VMD is a model-based technique that formulates the decomposition process as a constrained variational problem. By separating modes with predefined bandwidths, VMD effectively overcomes the deficiencies of EMD. Nevertheless, its performance is sensitive to the manual tuning of key parameters—namely the number of modes (K) and the penalty factor (σ)—which limits its adaptability.23–25 Another representative method is local mean decomposition (LMD), 26 which decomposes signals into Product Function components by iteratively extracting local mean and envelope curves. LMD avoids the endpoint effect of EMD to a certain extent and better retains the time–frequency localization of fault impulses, but it is prone to over-decomposition and sensitivity to random noise, leading to redundant components that obscure true fault information. 27
In parallel, wavelet-based methods have been widely adopted for fault feature extraction. The Wavelet Transform (WT) 28 achieves multi-resolution analysis by scaling and shifting wavelet bases, enabling precise localization of fault impulses in both time and frequency domains. Its extension, Wavelet Packet Transform (WPT), 29 further improves frequency resolution by decomposing both low-frequency and high-frequency bands, making it more effective in capturing high-frequency crack-induced impulses. However, WT/WPT performance heavily relies on the selection of wavelet bases and decomposition levels, which typically requires prior expertise and iterative tuning, limiting adaptability under varying operating conditions. 30 Additionally, singular value decomposition (SVD) and its improved variants (e.g., Reweighted SVD)31,32 have gained traction for weak feature enhancement. For instance, the SVD packet was developed to extract weak fault features, 33 and improved SVD-based methods have been successfully applied to gear crack severity assessment. 34 Furthermore, state-of-the-art denoising frameworks, such as digital twin-guided physical-virtual integration 35 and fractional-order stochastic resonance with adaptive frequency scanning, 36 have demonstrated superior performance in capturing early and multi-frequency fault signatures. By constructing a Hankel matrix from the vibration signal and decomposing it into singular values and vectors, SVD separates fault components from noise by selecting effective singular values for signal reconstruction. Reweighted SVD enhances the sparsity of fault features through adaptive weight adjustment, achieving superior noise suppression, 31 but its effectiveness depends on the proper selection of Hankel matrix window length and the number of retained singular values, which introduces subjectivity in practical applications. 37
More recently, adaptive harmonic decomposition (AHD) has emerged as a particularly promising technique. 38 Compared to the methods mentioned above, AHD demonstrates superior capability in isolating the CIIC with a higher signal-to-noise ratio and clearer periodicity, providing a more robust foundation for subsequent severity assessment. Despite this significant advantage, the conventional AHD faces a critical limitation: a heavy dependence on empirical parameter tuning. Two core parameters, the harmonic intensity regulation parameter (α) and the bandwidth constraint parameter (β), are typically determined through subjective experience. This reliance not only introduces variability in decomposition performance but also significantly hinders the method’s adaptability to gear crack signals. Therefore, improving the existing AHD method is crucial for overcoming the limitations of empirical parameter settings.
To address the inherent empirical parameter tuning of the conventional AHD method, this study proposes an improved AHD (IAHD) method by integrating the improved Rüppell’s Fox optimizer (IRFO) for adaptive parameter tuning.39,40 The core of this improvement lies in employing the IRFO algorithm to automatically and efficiently search for the optimal combination of the two critical parameters of the AHD method, namely the harmonic intensity regulation parameter (α) and the bandwidth constraint parameter (β), thereby maximizing the capability of extracting the CIIC from gear vibration signals. This optimization process directly tackles the empirical bottleneck, ensuring that AHD can adaptively perform high-quality signal decomposition without manual intervention. Building upon the IAHD method for feature enhancement, this article further proposes a comprehensive diagnostic framework for gear crack severity assessment by integrating the IAHD with a convolutional neural network (CNN).41,42 This integrated IAHD–CNN approach leverages the superior feature representation from the adaptive decomposition and the powerful pattern recognition capability of deep learning, forming an effective solution for accurate and intelligent fault diagnosis. This transition toward intelligent assessment aligns with recent developments in machinery condition monitoring, such as the optimization of degradation feature spaces through canonical correlation analysis 43 and the implementation of semi-supervised learning strategies to handle diagnosis tasks with limited labeled samples. 44
The core innovations of this article are twofold, as follows: (1) An IAHD method is proposed, which employs the IRFO algorithm to adaptively optimize its two key parameters (α and β) by using the periodic modulation intensity (PMI) of CIIC as the objective function. This integration ensures the accurate extraction of CIIC from gear vibration signals, overcoming the empirical dependency and limited search precision of the conventional AHD method; (2) A gear crack severity assessment method is proposed by integrating the IAHD with a CNN-based classifier. This integration eliminates the need for manual feature engineering, thereby improving the automation and accuracy of crack severity assessment. The remainder of this article is structured as follows: The ‘Theoretical prerequisites’ section presents the fundamental principles of AHD, the RFO, PMI, and CNN. The ‘Improved AHD method and its application’ section elaborates on the proposed IAHD method and its specific application to gear crack severity assessment with CNN. The ‘Simulation analysis’ section verifies the effectiveness of the proposed method via simulation analysis. The ‘Experimental validation’ section conducts experimental validation using experimental gear test data collected from a bevel gear test rig. Finally, the ‘Conclusion’ section summarizes the key research outcomes and concludes the article.
Theoretical prerequisites
This section introduces theoretical fundamentals that are utilized later in this article, including the AHD, the RFO, the PMI, and the CNN.
Adaptive harmonic decomposition
The core objective of AHD is to reconstruct CIIC by isolating and summing the harmonic-cluster within a pre-identified resonance band (assuming the resonance band is known, typically identified using techniques such as fast kurtogram or spectral kurtosis analysis).
38
The process is formulated as a variational optimization problem. For a target harmonic component with an estimated frequency

where

where
The solution is obtained through an iterative algorithm, as summarized in Table 1, which outlines the key steps for adaptive harmonic extraction.
Algorithm for adaptive harmonic decomposition.
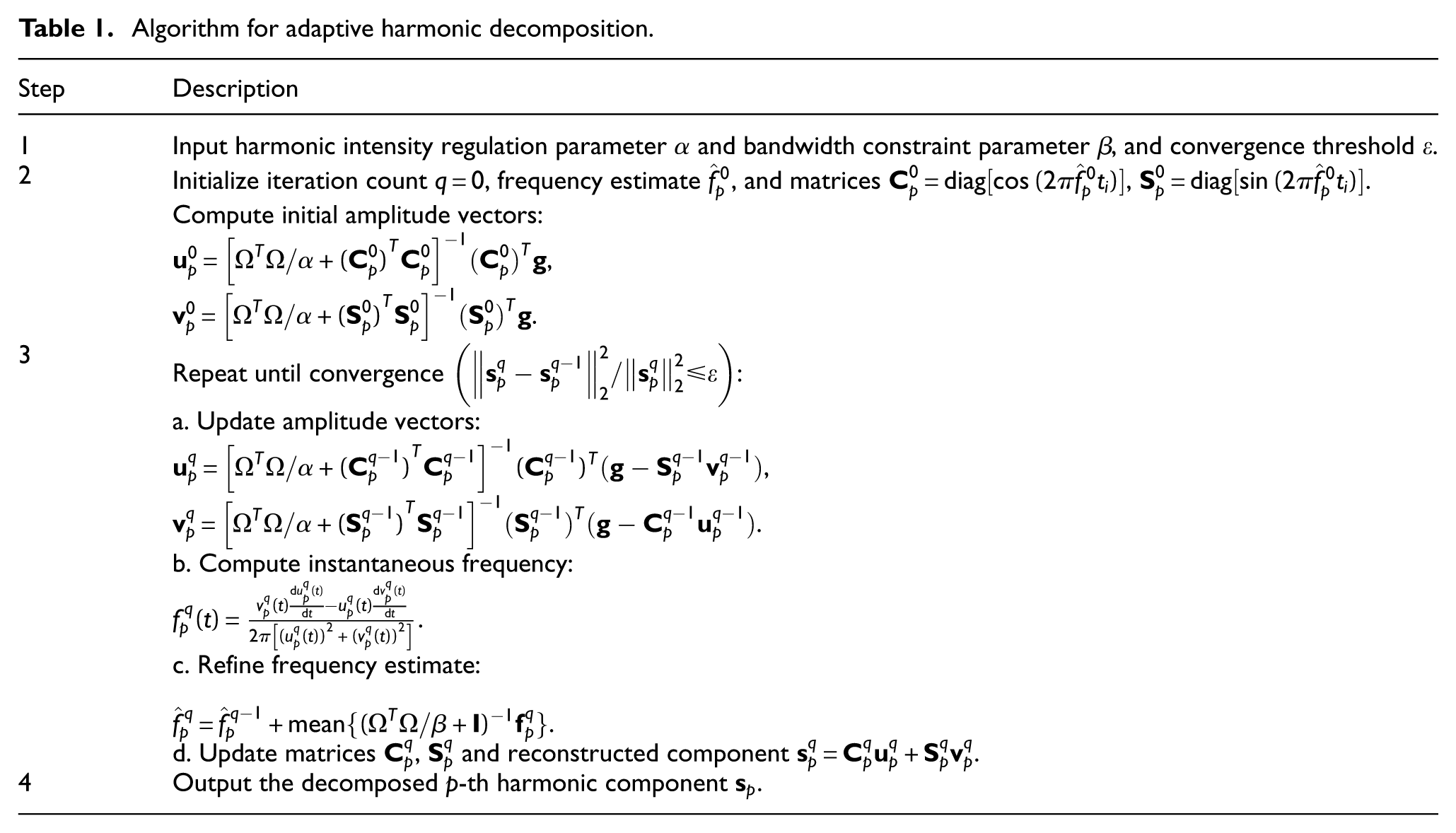
Through this iterative optimization, AHD effectively extracts the fault-related harmonic components
Rüppell’s Fox optimizer
The RFO is a meta-heuristic algorithm inspired by the intelligent collective foraging behavior of Rüppell’s foxes during day and night. 40 The algorithm mathematically simulates the primary foraging activities of foxes, which leverage their sharp vision, hearing, and sense of smell to hunt, aiming to balance exploration and exploitation throughout the optimization process. In the mathematical model of RFO, the population of foxes is first randomly initialized within the search space, similar to other swarm optimization algorithms. The position of each fox represents a candidate solution to the optimization problem.
During daylight hours, when vision is superior to hearing, a fox’s position update follows this model:

where
When searching using the eye-rotation characteristic (with a rotation angle up to 260°), a random walk model is employed:

where
For hunting using hearing during the day, the position update is modeled as:

with an additional random walk component based on ear rotation (up to 150°):

At night, foxes rely more on hearing. The position update when using hearing is:

followed by a random walk:
As a fox approaches prey, its sense of smell intensifies exponentially. This behavior is modeled to refine the solution:

where
Finally, to avoid local optima, the algorithm includes a worst-case exploration phase, where the fox in the worst position performs a large random walk:

This ensures the population can escape from promising but suboptimal regions. It is important to note that the random walk step size
Periodic modulation intensity
PMI is an information metric specifically designed for quantifying the diagnostic information in mechanical vibration signals, particularly the strength of fault-induced periodic amplitude modulation against background noise and random interferences.32,45 Its core principle is to measure the energy ratio between the periodic modulation component (typically linked to a fault such as a gear crack) and the random modulation component (e.g., noise) within a signal. The mathematical definition of PMI is given by:

where
In practice, PMI is efficiently estimated using the autocorrelation function of the signal’s envelope. For an envelope signal

The total energy of the envelope is given by

PMI possesses several key properties that make it suitable for fault feature evaluation. First, it exhibits energy independence (scale-invariance):

for any scale factor
In the context of gear crack diagnosis, PMI of the CIIC serves as an effective objective function to evaluate the quality of decomposed signal components, guiding the optimization process to enhance fault-related features. The selection of PMI as the objective function is grounded in its unique ability to isolate fault-related periodic features from complex background noise. Traditional energy-based indicators, such as RMS and criteria based on singular values (SVs), tend to prioritize high-energy regular vibrations (e.g., gear meshing), which can easily mask the weak-energy impulsive signatures of early-stage gear cracks.31,35,36 Furthermore, statistical metrics like Kurtosis are often biased by non-periodic transients and random outliers, leading to potential misdiagnosis. 31 Since the CIIC caused by gear cracks is fundamentally periodic and synchronized with the gear rotation, 10 PMI leverages the autocorrelation property of the signal envelope to specifically quantify these rhythmic modulations. By maximizing PMI, the IAHD framework can adaptively suppress random interference and high-energy meshing harmonics, providing a more stable and physically meaningful feature representation for subsequent severity assessment.
Convolutional neural networks
A CNN is a type of deep learning model widely used in image processing and pattern recognition tasks, and its application has been effectively extended to one-dimensional signal analysis such as vibration diagnostics. Its basic architecture typically includes convolutional layers, pooling layers, and fully connected layers. The convolutional layer extracts features by sliding convolutional kernels over the input feature map within local receptive fields. This operation can be expressed as a weighted sum of the input patch and the weight kernel plus a bias term, followed by a nonlinear activation function transformation. 41 The activation function commonly used is the Rectified Linear Unit (ReLU), defined as:

The convolution operation for a sub-signal window

where
The pooling layer reduces the spatial dimension of the feature map, compressing data size and improving the model’s robustness to local changes such as translation. A common strategy is max-pooling, which retains the maximum value in a local receptive field. Its operation is given by:

where
The classification layer, composed of fully connected layers, converts the high-order features into the final classification output. It maps the network output to a probability distribution over each category using a function like Softmax. The probability

where
Improved AHD method and its application
The improved AHD method
Taking the two core parameters (α and β) of the AHD algorithm as the optimization variables, we construct an integrated closed-loop adaptive optimization framework. This framework synergistically combines the IRFO algorithm as an intelligent parameter optimizer, the AHD method as the signal processing tool to extract the CIIC, and the PMI of CIIC as the quantitative performance metric—serving directly as the objective function. 39 The entire optimization procedure is executed systematically through the following iterative steps:
Step 1. Initialization: In the IRFO algorithm, a population of foxes is initialized, where each fox’s position vector represents a candidate set of parameters (α, β). Simultaneously, the search space boundaries and the maximum number of iterations are defined.
Step 2. Fitness evaluation: For each fox in the population, its fitness is evaluated by running the AHD algorithm on the original gear vibration signal using its corresponding parameters to extract the CIIC. The PMI value of the CIIC is then calculated. Since optimization algorithms are typically used for minimization problems, the fitness is defined as ‘fitness = −PMI’, thereby transforming the PMI maximization problem into a minimization problem.
Step 3. Parameter Update: Based on the PMI fitness of each fox, its position is updated using the IRFO algorithm to generate a new generation of (α, β) parameter candidates.
Step 4. Iteration and termination: The “fitness evaluation–parameter update” cycle is repeated until a predefined termination condition is met.
Step 5. Final output: When the algorithm terminates, the position of the fox with the highest PMI value is output as the globally optimal parameter combination (α*, β*). This set of optimal parameters is then used to perform the final AHD decomposition on the original signal, yielding high-quality fault feature signals for subsequent assessment.
Through this parameter optimization framework based on the IRFO, the IAHD method is liberated from its reliance on manual empirical settings, achieving adaptive parameter adjustment tailored to different signal characteristics, thereby significantly enhancing its effectiveness and reliability in practical applications. The flowchart of the IAHD algorithm is shown in Figure 1.
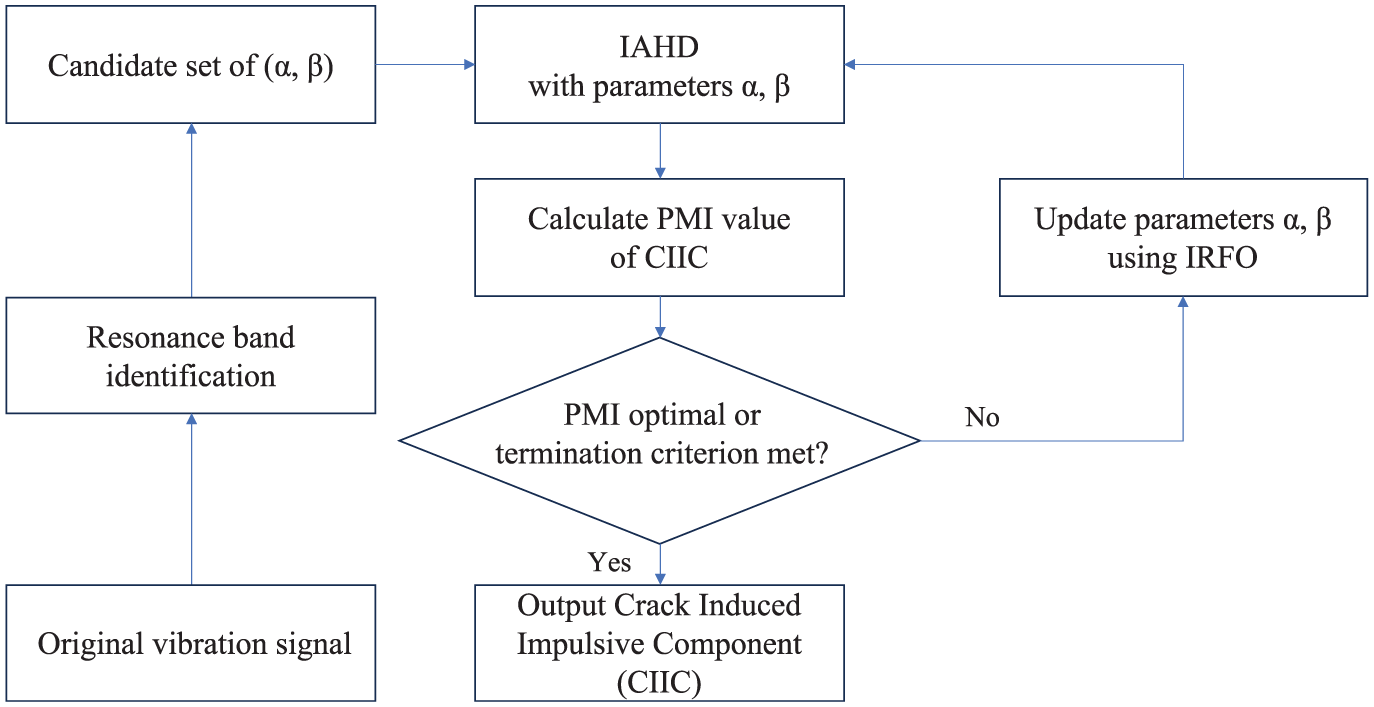
The flowchart of the IAHD algorithm.
The proposed improved RFO algorithm
The selection of RFO as the foundational optimizer is justified by its superior performance over 12 state-of-the-art algorithms, including PSO and GA. Recent benchmark evaluations
40
using the CEC 2017 suite show that RFO achieves performance improvements of up to 55.13% in high-dimensional spaces (100-D). Statistical analyses through Friedman’s and Holm’s tests further confirm RFO’s robustness in maintaining the balance between exploration and exploitation. To address the inherent limitation of fixed-step random walks in the original Rüppell’s fox optimizer (RFO), which hinders fine-grained exploitation near optimal solutions, this study proposes an IRFO algorithm incorporating an adaptive step-size control mechanism. The improvement is inspired by the successful application of adaptive strategies in algorithms like Particle Swarm Optimization (PSO). The core innovation lies in dynamically adjusting the critical random walk step-size parameter
The IRFO algorithm implements a performance monitoring and adjustment loop. It continuously tracks the improvement in the global best fitness across iterations. When the improvement falls below a set threshold for a consecutive number of iterations, indicating convergence stagnation, a step-size decay mechanism is triggered. Specifically, the current
To guarantee the statistical reliability of the proposed algorithm, its convergence performance is evaluated against the standard RFO using the multimodal Ackley benchmark function. Figure 2 illustrates the average convergence curves derived from 30 independent trials to eliminate the bias of stochastic randomness. Table 2 further quantifies the performance gains, presenting the mean and standard deviation of the best fitness values obtained by both algorithms across the 30 independent trials. As observed, the proposed IRFO (with adaptive step size) exhibits a more rapid descent and achieves a higher level of precision than the standard RFO. Quantitatively, the lower mean fitness and significantly reduced standard deviation over 30 runs confirm that the adaptive mechanism effectively enables the algorithm to transition from global exploration to precise local exploitation, thereby ensuring both search accuracy and stability in navigating complex parameter spaces.
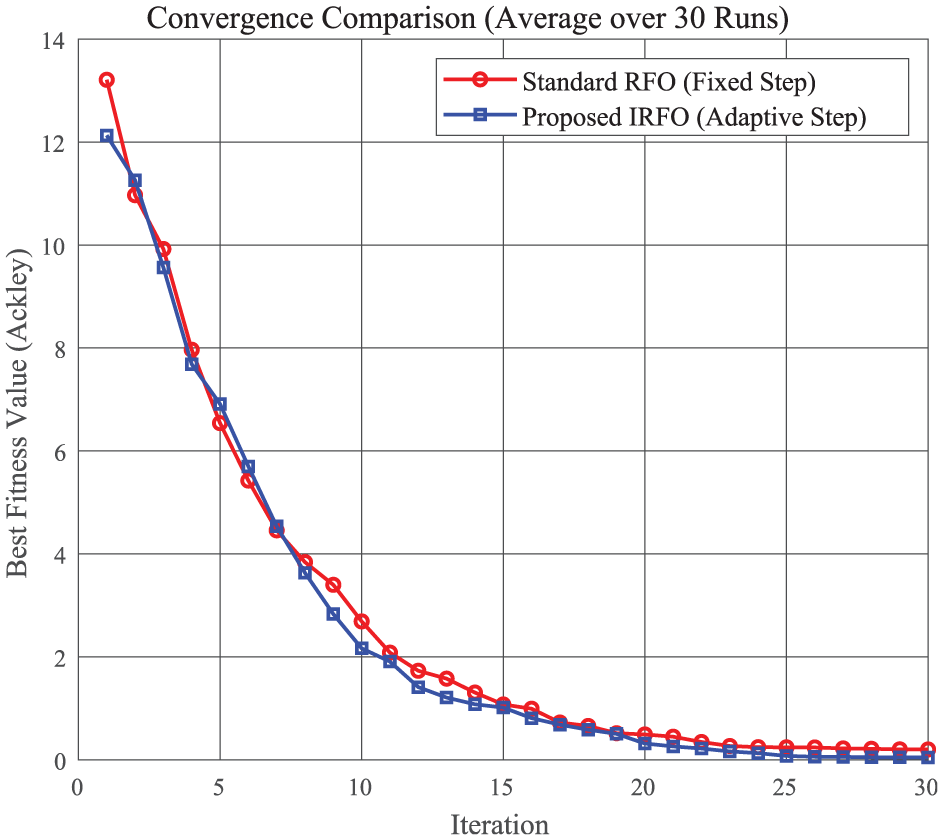
Average convergence curves on Ackley Function over 30 runs.
Statistical results of 30 independent trials on Ackley Function.
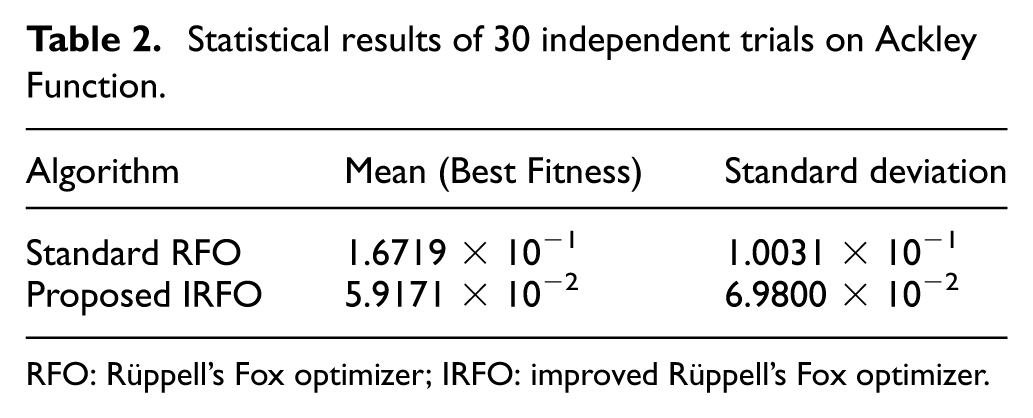
RFO: Rüppell’s Fox optimizer; IRFO: improved Rüppell’s Fox optimizer.
Optimization objective
The core optimization objective of the IAHD is to adaptively determine the two key parameters of the AHD algorithm: α for harmonic intensity regulation and β for bandwidth constraint. The setting of these two parameters directly dictates the quality of the extraction of CIIC by AHD. In contrast, conventional AHD rely on subjective human experience to determine them, which introduces variability in decomposition performance and limits the method’s adaptability. Therefore, the optimization task in this study can be formulated as a two-dimensional search problem, where the value range of (α, β) is set according to the upper and lower bounds of the commonly used values for such parameters, 38 aiming to find an optimal parameter combination (α*, β*) that enables the extracted CIIC to contain the richest gear crack information.
Building upon the definition and properties of the PMI outlined in the ‘Periodic m odulation intensity’ section, the PMI of CIIC is strategically employed as the objective function to guide the adaptive optimization of IAHD parameters. The core of the proposed method formulates the search for optimal IAHD parameters

where
To ensure the reproducibility of the optimization results, the detailed hyperparameter configurations of the IRFO are summarized in Table 3. Considering the high computational intensity of the iterative AHD process, a population size of 15 and a maximum iteration count of 30 are adopted to achieve an optimal balance between diagnostic accuracy and computational cost. The search boundaries for the harmonic intensity regulation parameter (α) and the bandwidth constraint parameter (β) are set to [1 × 10−16, 1 × 10−8], covering the sensitive regions for crack-induced impulse extraction. Furthermore, an adaptive step-size mechanism is implemented with an initial walk rate of 1 × 10−9 and a decay factor of 0.4, which is triggered after three consecutive iterations without significant improvement, ensuring fine-grained exploitation as the algorithm converges.
Hyperparameter configurations of the IRFO algorithm.
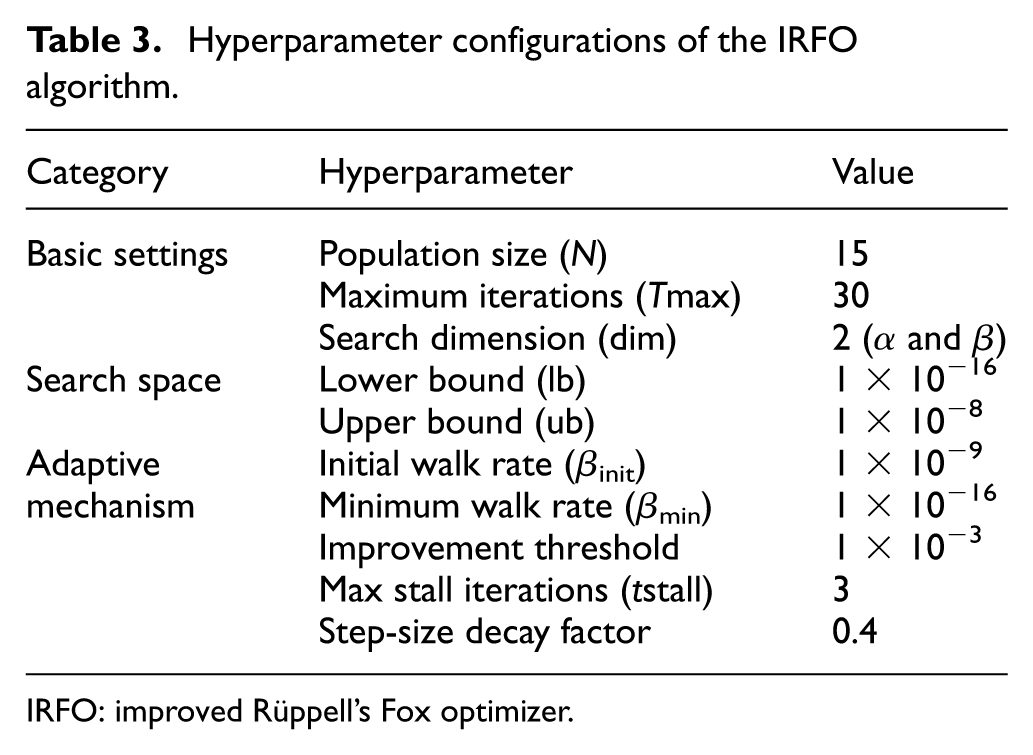
IRFO: improved Rüppell’s Fox optimizer.
Application of IAHD to gear crack severity assessment
To achieve intelligent and high-accuracy assessment of gear crack severity levels, this section proposes a diagnostic method based on the proposed IAHD and the CNN architecture. As illustrated in Figure 3, the overall diagnostic workflow comprises the following three key steps.
Step 1: Mount high-precision accelerometers at the key measurement positions of the gearbox to acquire the original vibration signals from the rotating machinery equipped with a gear transmission system.
Step 2: Following data preprocessing, the proposed IAHD framework is applied to each data sample to achieve adaptive signal decomposition and feature enhancement. Specifically, for each vibration signal sample, the IRFO algorithm first iteratively searches for the optimal parameter combination (α*, β*) for AHD, with the objective of maximizing the PMI of CIIC. Once the optimal parameters are obtained, they are used to perform AHD decomposition, thereby extracting high-quality fault feature signals from the original vibration signal. Compared to the original signal, the processed signal exhibits a significantly improved signal-to-noise ratio (SNR), and the periodic impulse components induced by the fault become more prominent and pure. These high-quality reconstructed signals are then used as the input for the CNN, providing more reliable features for subsequent accurate assessment.
Step 3: To achieve intelligent and high-precision identification of gear crack severity levels, this section presents a gear crack severity assessment method based on the proposed IAHD approach. The large number of feature signal samples obtained after the IAHD decomposition are partitioned into training, validation, and test sets according to a predefined ratio. To achieve precise crack severity assessment, a 1D-CNN model is constructed to classify the CIIC extracted via IAHD. The model architecture is detailed in Table 4. It comprises multiple convolutional stages to capture the impulsive characteristics of gear faults. Specifically, the network utilizes small 3 × 1 kernels to maintain a fine-grained receptive field, while Max-pooling and Adaptive Average Pooling layers reduce dimensions and enhance feature robustness. During the training phase, the model is optimized using the Adam algorithm with a learning rate of 0.0003 for 120 epochs. A Dropout strategy (rate = 0.5) is applied before the final output layer to improve the generalization ability of the model across different fault severities. During the training phase, the CNN automatically learns deep fault features from the signals through multiple convolutional and pooling operations. Ultimately, the model outputs an assessment result for the gear crack severity, such as “C1,”“C2,”“C3,”“C4” and “C5.” This end-to-end diagnostic process, from the original vibration signal to the final fault level, achieves the automation and intellectualization of fault diagnosis.
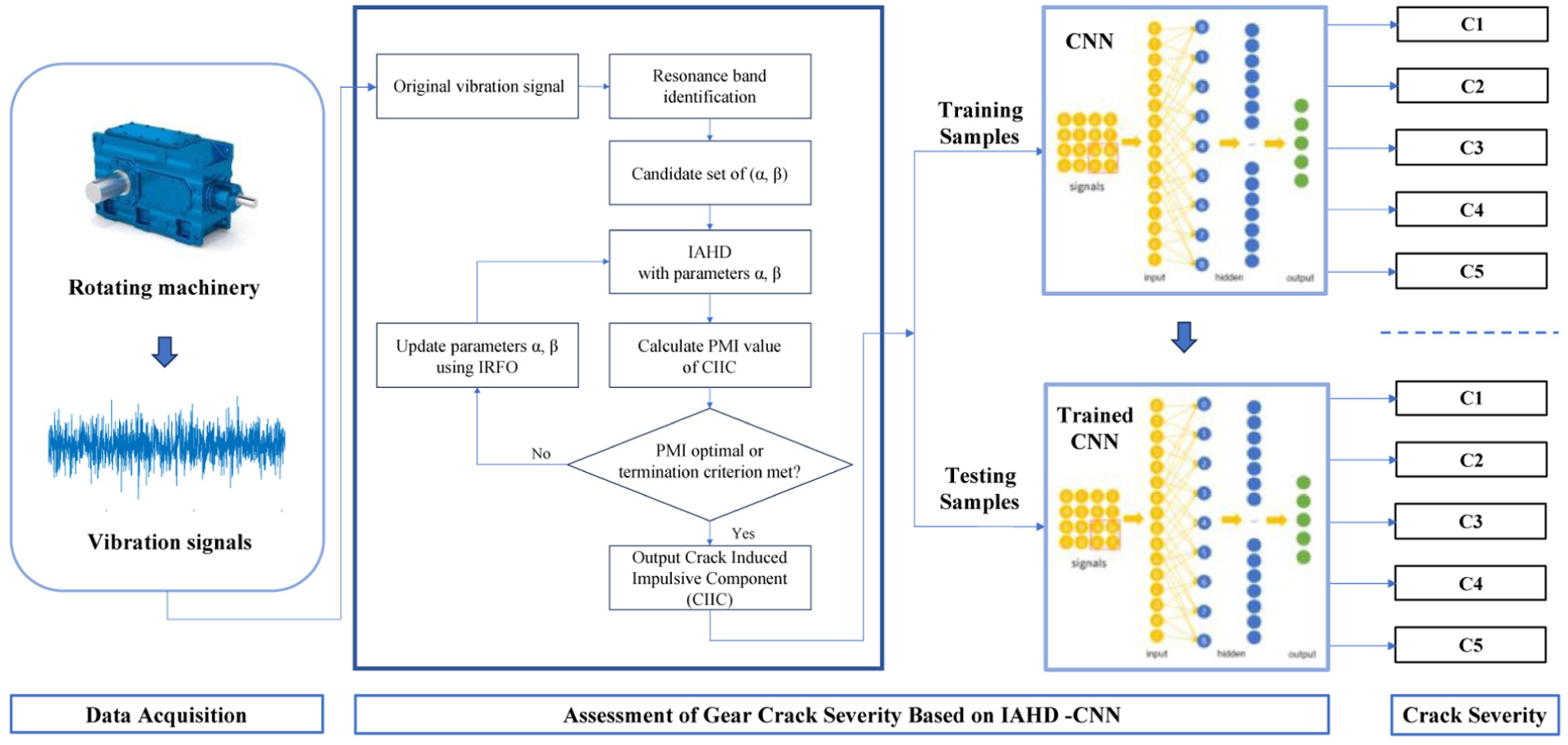
Gear crack severity assessment approach based on IAHD and CNN.
Detailed specifications of the CNN and training parameters.
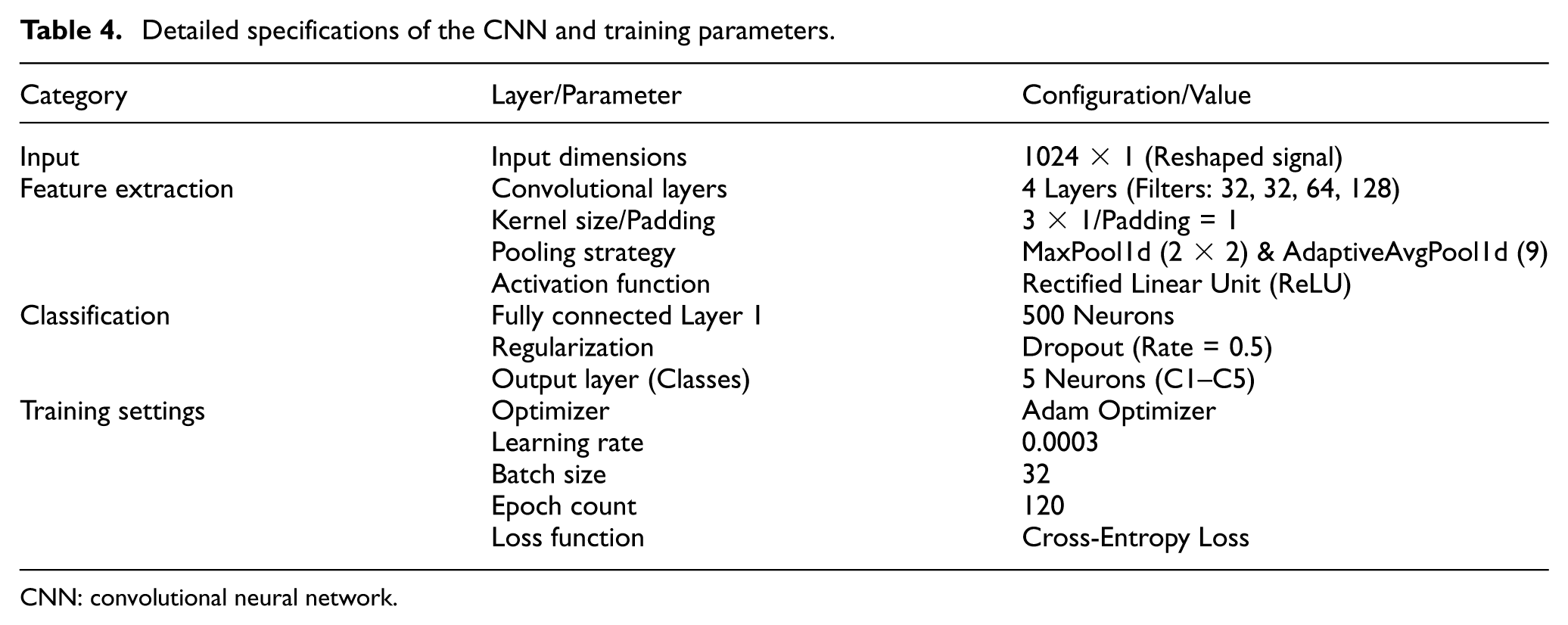
CNN: convolutional neural network.
Simulation analysis
Simulation data generation
To verify the effectiveness of the proposed IAHD method and its application to gear crack severity assessment, a phenomenological model is adopted to generate simulated vibration signals of a gearbox with a tooth crack. The simulated signal is designed to replicate the key components present in real vibration signals, which include rotor vibration, gear meshing vibration, CIIC, sporadic external shocks, and background noise.46–48
The phenomenological model for generating the simulated vibration signal is as follows:

where the rotor vibration

The gear meshing vibration

The core component, the periodic fault impulses
where
The sporadic external shocks
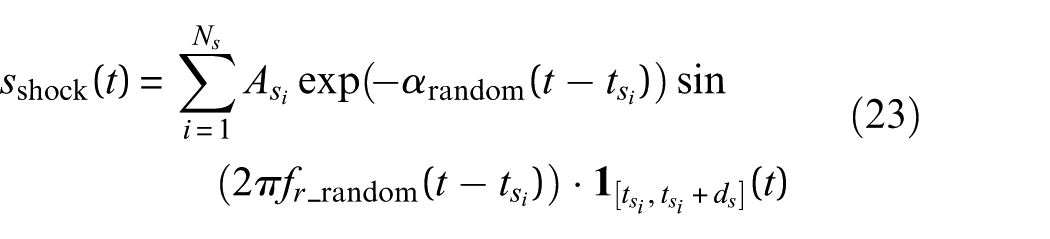
where the number of shocks
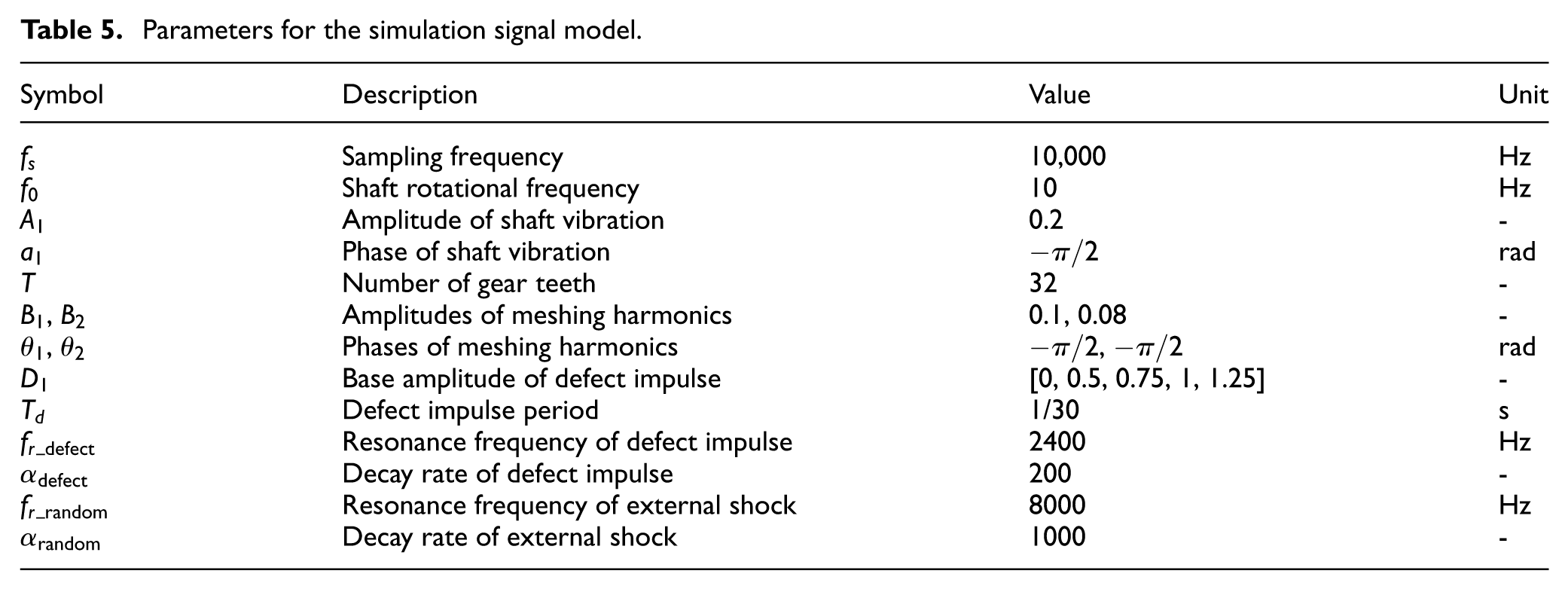
The key parameters used for generating the simulation signals in this study are listed in Table 5 below. This model provides a standard and controllable dataset for the subsequent algorithm validation. The five health conditions of the simulated signals are illustrated in Figure 4.
Parameters for the simulation signal model.
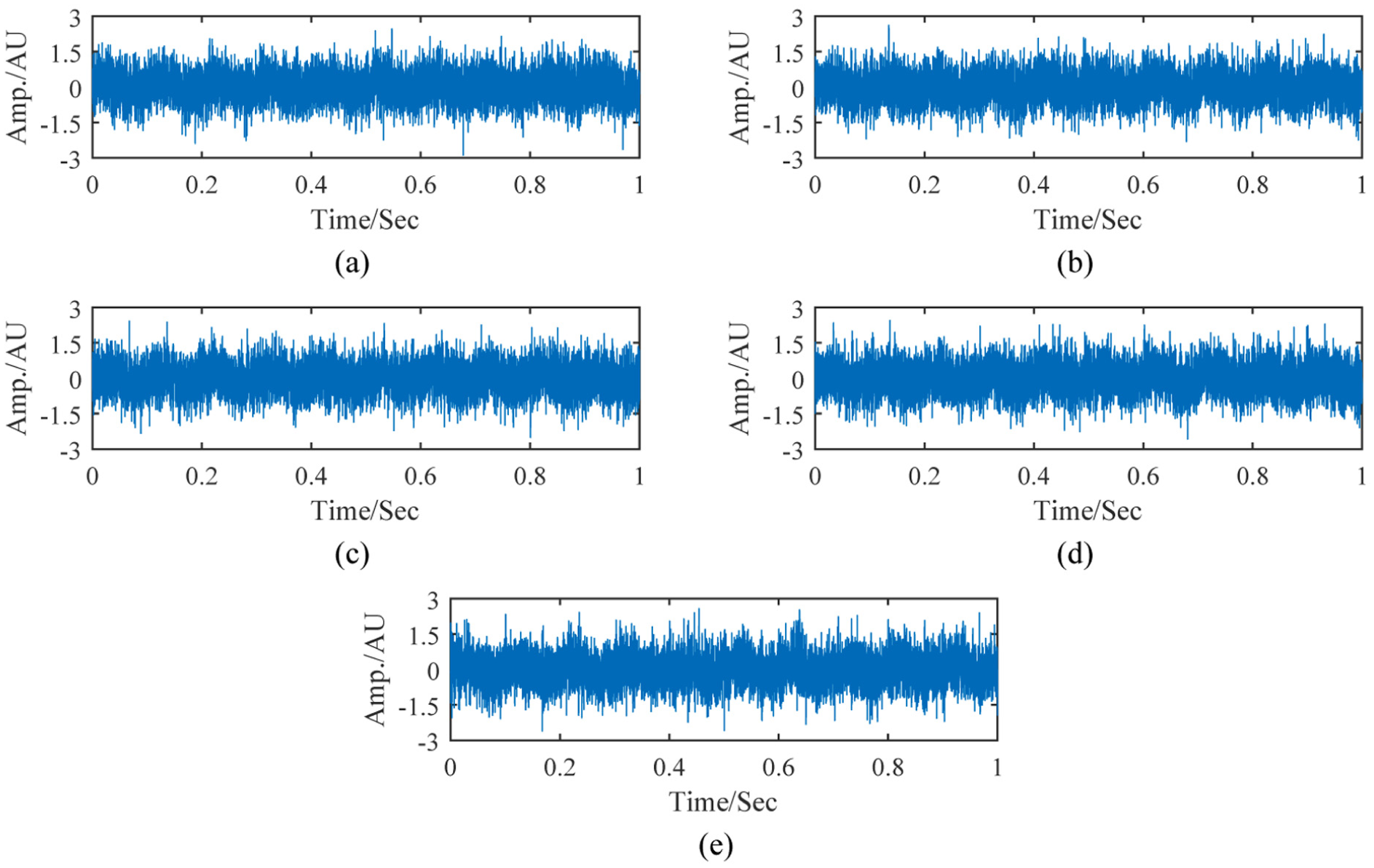
Simulated vibration signals for five different fault severity levels: (a) C1, (b) C2, (c) C3, (d) C4, and (e) C5.
Analysis results
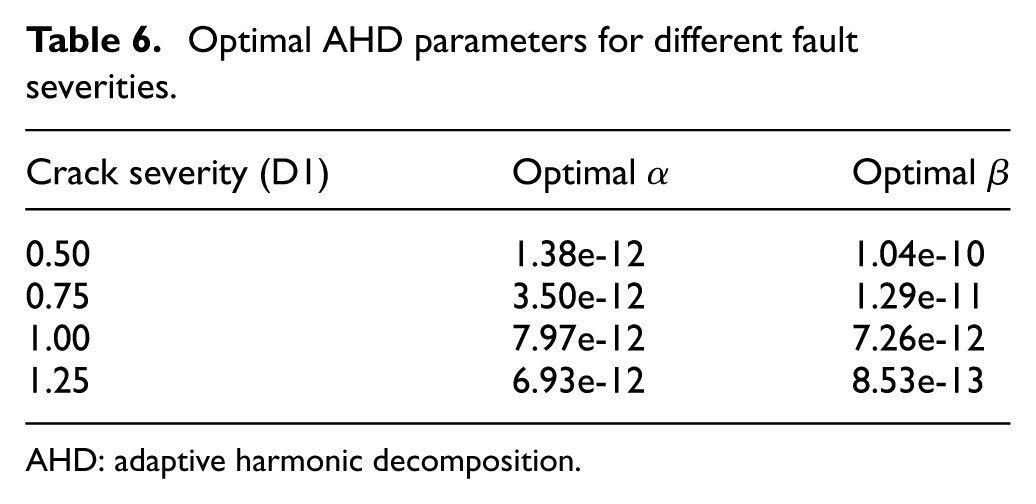
We first verify the performance of the IRFO algorithm in optimizing AHD parameters. For signals of each crack severity level, the algorithm iteratively searches for the optimal (α, β) parameter combination with the objective of maximizing the PMI. The optimization results are shown in Table 6.
Optimal AHD parameters for different fault severities.
AHD: adaptive harmonic decomposition.
As can be seen from the table, the IRFO algorithm can find a set of optimal parameters for signals with different crack severity levels. It is noteworthy that when the crack severity is high (D1 ≥ 0.75), the algorithm converges to the same set of optimal parameters, indicating that this parameter combination possesses stronger robustness and generality for significant faults.
To quantitatively evaluate the enhancement in fault feature extraction, the PMI of the CIIC derived from the proposed IAHD method was calculated and compared against that from the conventional AHD. The comparative results, summarized in Table 7, reveal a consistent and notable increase in PMI values across all tested crack severity levels when employing the IAHD. To quantitatively evaluate the feature extraction capability, a comparative study using EMD and VMD is introduced. As shown in Table 7, the PMI values of the CIIC obtained by IAHD consistently and significantly exceed those of the two classical methods across all severity levels. For the most severe crack (C5), IAHD achieves a PMI of 312.18, whereas VMD and EMD yield only 3.54 and 5.08, respectively. This superiority stems from IAHD’s ability to isolate fault-featured harmonic clusters through recursive decomposition, which effectively suppresses the in-band noise that the sifting process of EMD and the fixed bandwidth of VMD fail to eliminate. This marked improvement directly corroborates the efficacy of the integrated IRFO adaptive optimization strategy, confirming its ability to significantly boost the discriminative power and clarity of fault-related information extracted by the decomposition process.
PMI values of CIIC by AHD and IAHD under different crack severities.
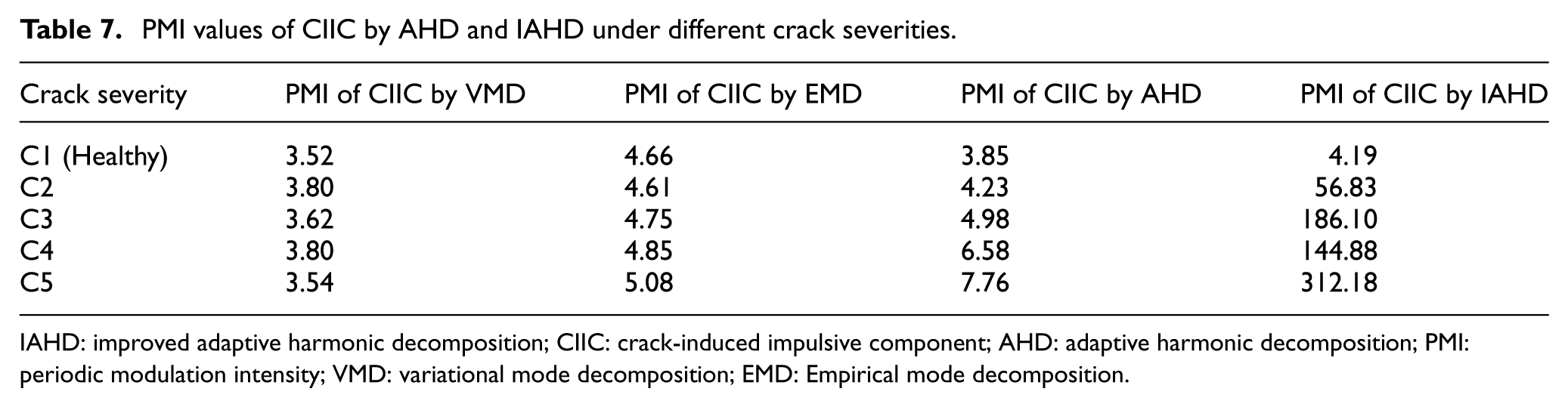
IAHD: improved adaptive harmonic decomposition; CIIC: crack-induced impulsive component; AHD: adaptive harmonic decomposition; PMI: periodic modulation intensity; VMD: variational mode decomposition; EMD: Empirical mode decomposition.
To intuitively demonstrate the decomposition effectiveness of IAHD, we selected the signal with a fault severity of D1 = 0.75 as a representative case. Figure 5 shows the original signal, the decomposition result using traditional empirical parameters, and the decomposition result using IAHD optimized parameters.
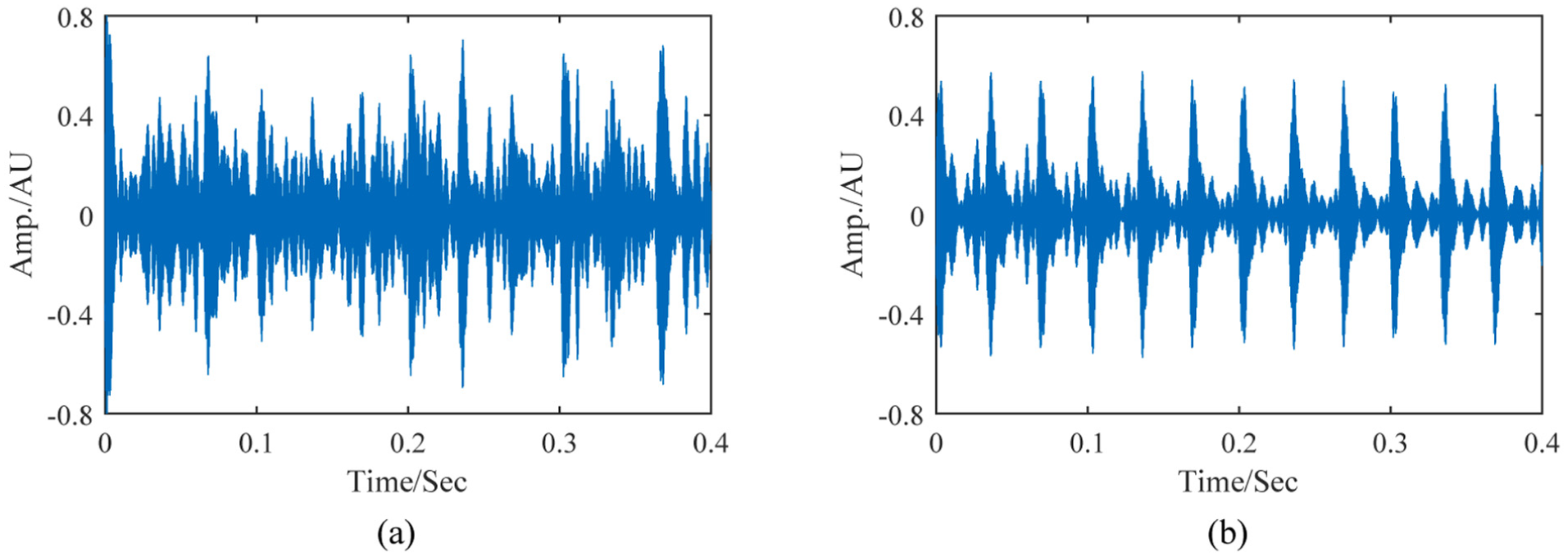
CIIC extraction comparison between AHD and IAHD for simulated signal: (a) CIIC obtained by AHD and (b) CIIC obtained by IAHD.
From Figure 5(a) and (b), it can be clearly observed that the original signal is submerged by strong background noise and gear meshing components. The CIIC obtained by IAHD using optimized parameters exhibits a higher SNR, clearer pulse shapes, and less background interference. This indicates that through IRFO optimization, IAHD can more precisely locate and extract fault features than conventional AHD, providing higher-quality input for the subsequent assessment task.
To further quantitatively evaluate the performance of the proposed IAHD, we compare the assessment results of the conventional AHD–CNN with those of the proposed IAHD–CNN. To ensure a fair comparison, both methods employ an identical CNN architecture and training strategy. Following the extraction of the CIIC via either conventional AHD or the proposed IAHD, the continuous signals are segmented into individual samples with a length of 1024 points and a 50% overlap. Specifically, 59 samples are generated for each of the five health states (C1–C5), resulting in a total dataset of 295 samples. Following the standard research protocol in deep learning, this dataset is partitioned into three independent subsets using a 6:2:2 ratio: 177 samples for model training, 59 samples for validation to monitor the training process and tune hyperparameters, and the remaining 59 samples as an independent test set for final performance evaluation. This class-wise partitioning ensures that the model is trained and evaluated on a perfectly balanced distribution of features, with the only difference being the quality of the input feature representation provided by the two respective decomposition methods. The comparison results are presented in Table 8. Table 8 summarizes the diagnostic accuracy of the CNN model using feature representations from different decomposition methods. The results indicate that the proposed IAHD–CNN framework achieves an average accuracy of 94.91%, far outperforming VMD–CNN (62.37%) and EMD–CNN (48.33%). The performance degradation of EMD and VMD is primarily attributed to their susceptibility to intense background noise and random shocks, which leads to mode mixing and the masking of subtle crack signatures. Conversely, the IRFO-optimized IAHD provides a more purified and enhanced input for the CNN, ensuring high assessment precision. As an example, the accuracy curves and confusion matrices for Test 1 are shown in Figure 6(a) and (b), respectively.
Diagnostic accuracy comparison of different methods on simulation data.
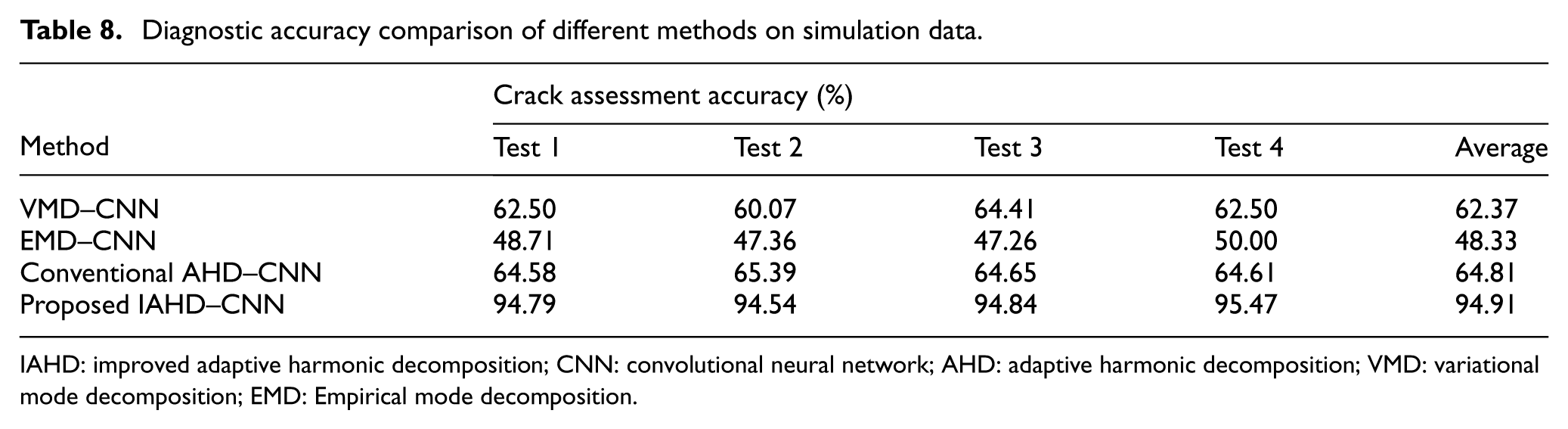
IAHD: improved adaptive harmonic decomposition; CNN: convolutional neural network; AHD: adaptive harmonic decomposition; VMD: variational mode decomposition; EMD: Empirical mode decomposition.
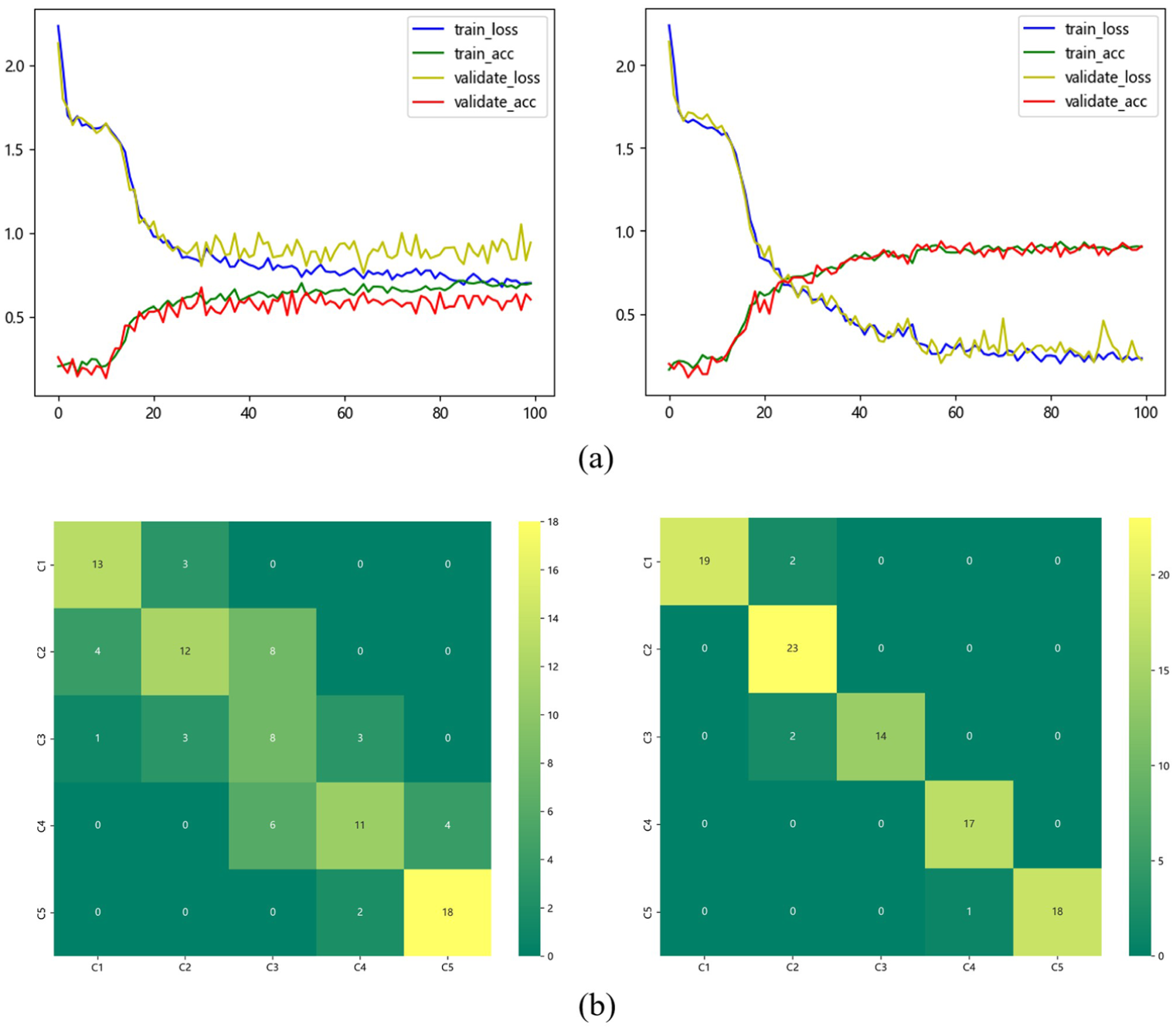
Comparison of assessment results for AHD–CNN and IAHD–CNN: (a) accuracy curves and (b) confusion matrices.
The results show that the assessment accuracy of IAHD–CNN reaches 94.79%, significantly outperforming the 64.58% of the AHD–CNN, an improvement of over 30 percentage points. This substantial performance gain directly demonstrates the effectiveness of the proposed IAHD–CNN approach for gear crack severity assessment.
Experimental validation
Experimental data acquisition
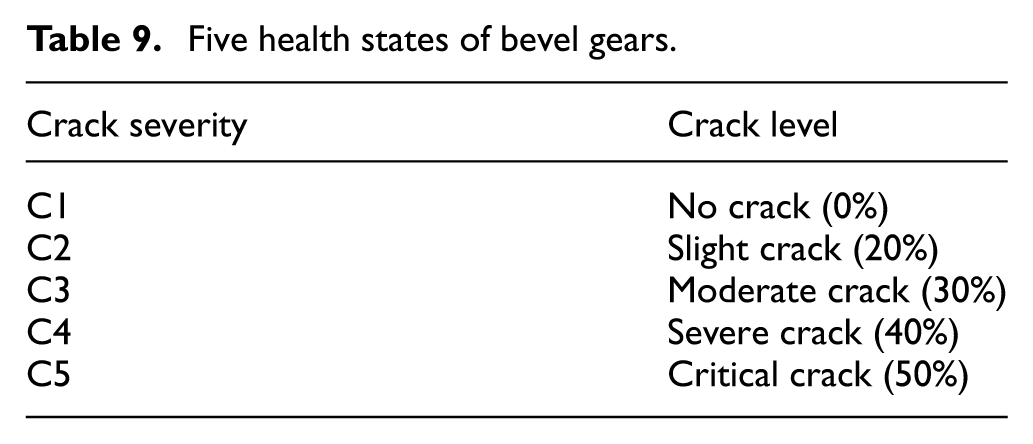
The experimental data for this study were obtained from a bevel gear test rig at Hunan University, a bevel gearbox testing platform capable of simulating different crack severity levels, as shown in Figure 7. By machining different crack depths at the root of the input shaft bevel gear, vibration signals corresponding to various crack levels were acquired. The dataset includes five health states: no crack (0%), slight crack (20%), moderate crack (30%), severe crack (40%), and critical crack (50%), as shown in Table 9. The bevel gears with different crack severity levels are depicted in Figure 8. Vibration signals for each crack severity level were collected using an accelerometer with a sampling frequency of 10,240 Hz. To construct a large-scale sample set suitable for deep learning and to ensure an unbiased evaluation of the model’s performance, the entire dataset was partitioned into training, validation, and test sets according to a standard ratio. The five health conditions of the experimental signals are illustrated in Figure 9.
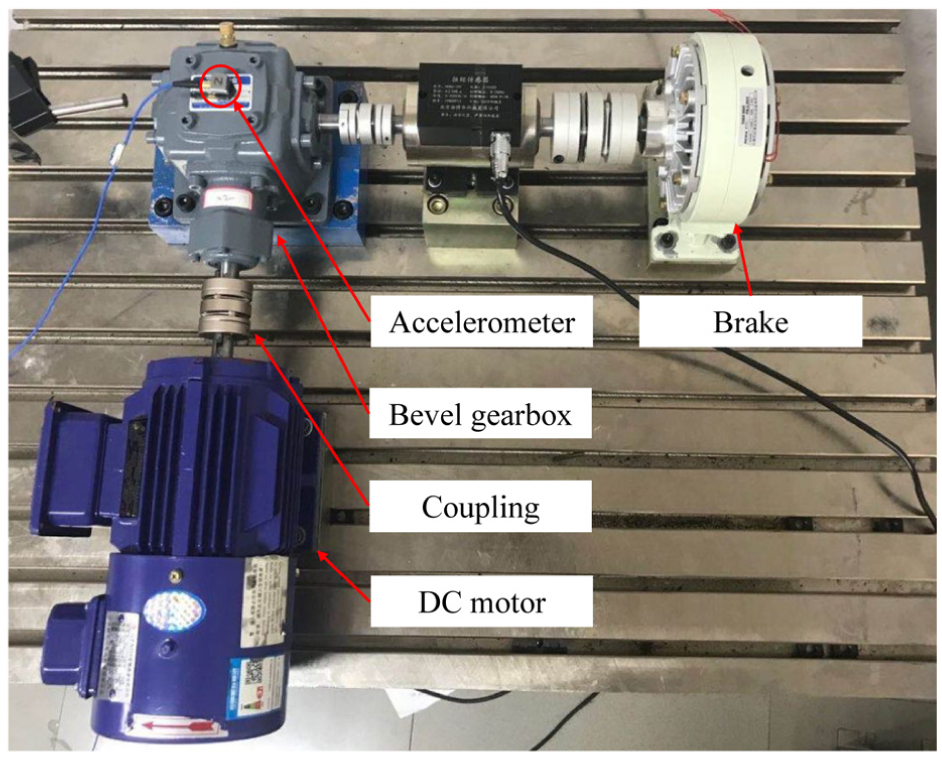
Bevel gear test rig.
Five health states of bevel gears.
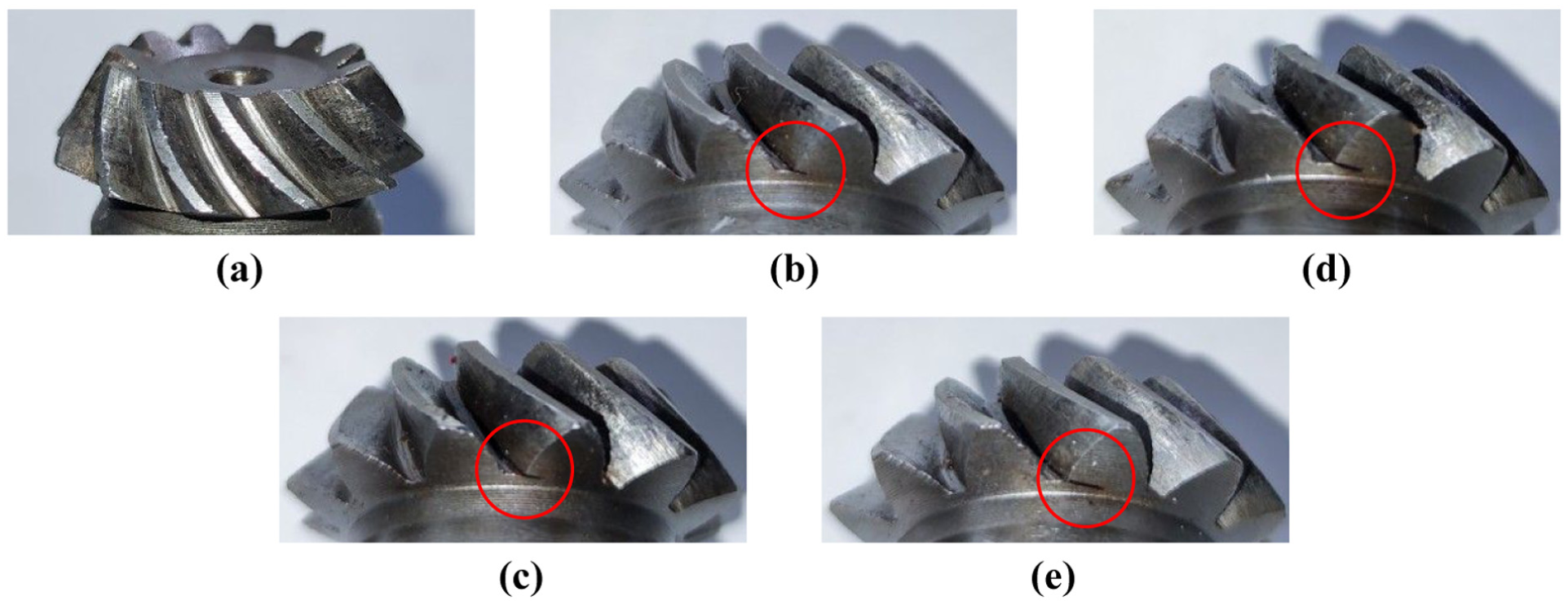
The bevel gears with different crack severity levels: (a) no crack, (b) slight crack, (c) moderate crack, (d) severe crack, and (e) critical crack.
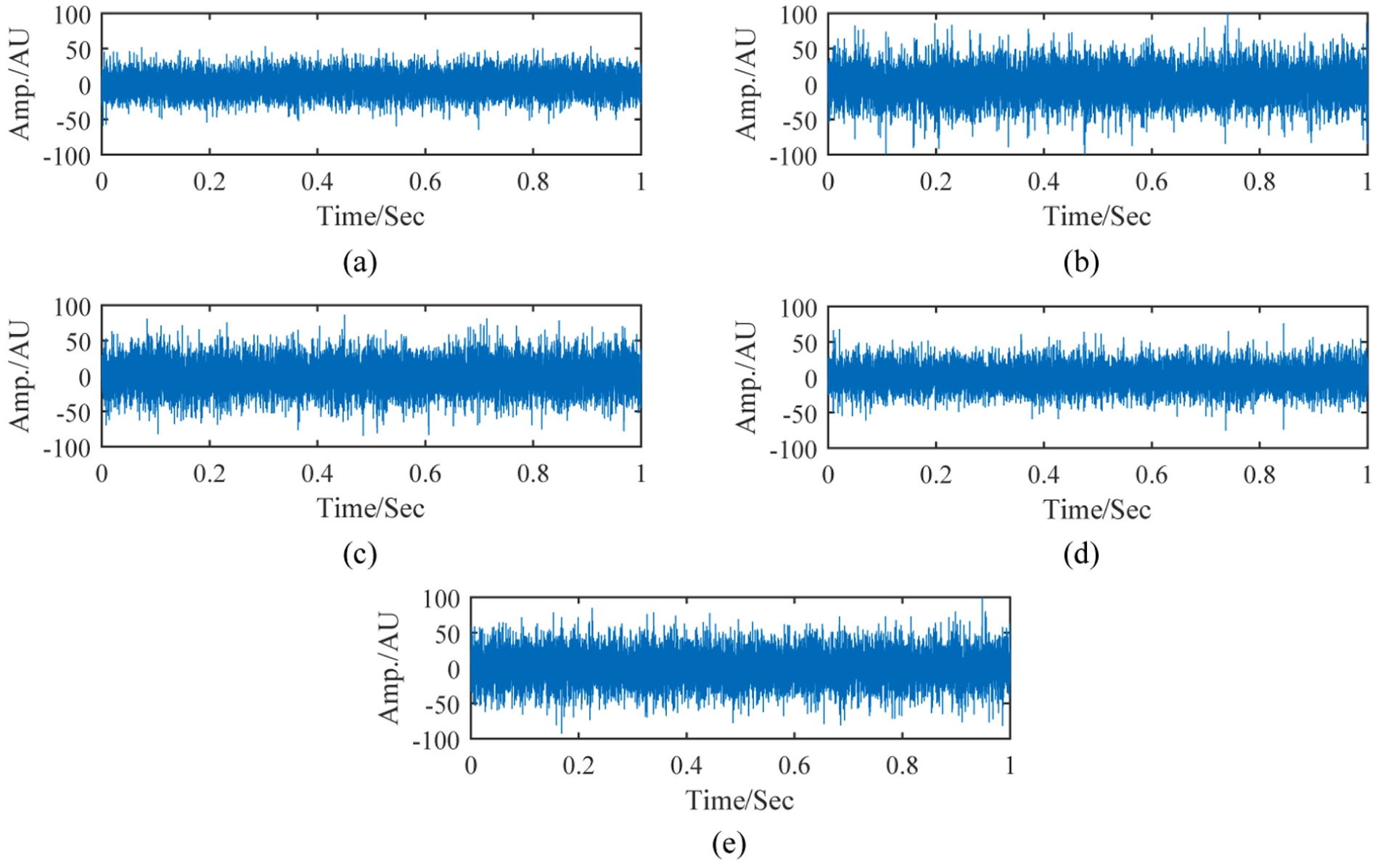
Experimental vibration signals for five different fault severity levels: (a) C1, (b) C2, (c) C3, (d) C4, and (e) C5.
Analysis results
Optimization results
During the data preprocessing stage, the proposed IAHD framework was applied to each data sample for adaptive signal decomposition and feature enhancement. To demonstrate the optimization effect, the PMI values of the CIIC obtained by AHD were compared with those by IAHD. The optimization performance on experimental data is further validated through the comparison presented in Table 10. It is evident that IAHD consistently yields higher PMI values than VMD and EMD across all health states. Even at the critical crack level (C5), IAHD maintains a superior PMI of 8.37. This demonstrates that the IRFO-optimized IAHD framework can adaptively balance harmonic regulation and bandwidth constraints, exhibiting robust feature enhancement capabilities in practical industrial environments with multi-source interference.
PMI values of CIIC by AHD and IAHD under different crack severities.
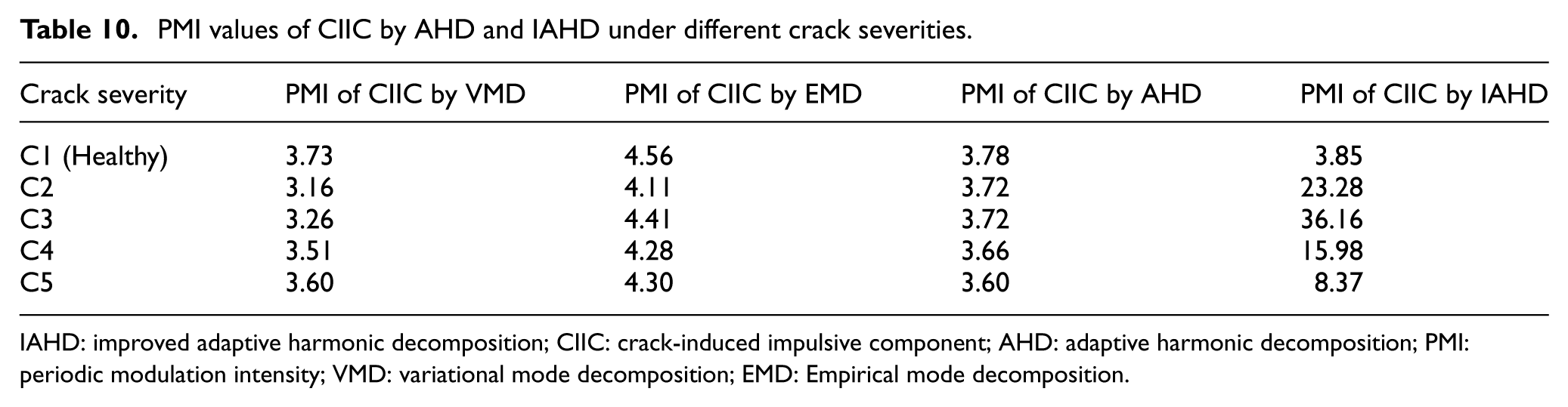
IAHD: improved adaptive harmonic decomposition; CIIC: crack-induced impulsive component; AHD: adaptive harmonic decomposition; PMI: periodic modulation intensity; VMD: variational mode decomposition; EMD: Empirical mode decomposition.
As evident from the table, the PMI values for all samples were significantly improved after IRFO optimization, directly demonstrating that the adaptive parameter strategy can effectively enhance the fault feature extraction capability of AHD. It is also observed that the PMI values of the CIIC exhibit a trend of increasing first and then decreasing as gear crack severity intensifies, which is consistent with the mechanical evolution characteristics of gear tooth root cracks. The PMI values of the CIIC increase first with the intensification of gear crack severity due to the enhanced periodic fault impulses induced by regular meshing stiffness mutations and then decrease at the critical crack stage as the meshing periodicity is destroyed and non-periodic interferences are significantly aggravated.
Performance validation
To intuitively demonstrate the decomposition performance of IAHD on experimental data, we selected a vibration signal corresponding to a severe crack severity level as a representative case. Figure 10 shows the original signal, the decomposition result using traditional empirical parameters, and the decomposition result using IAHD optimized parameters.
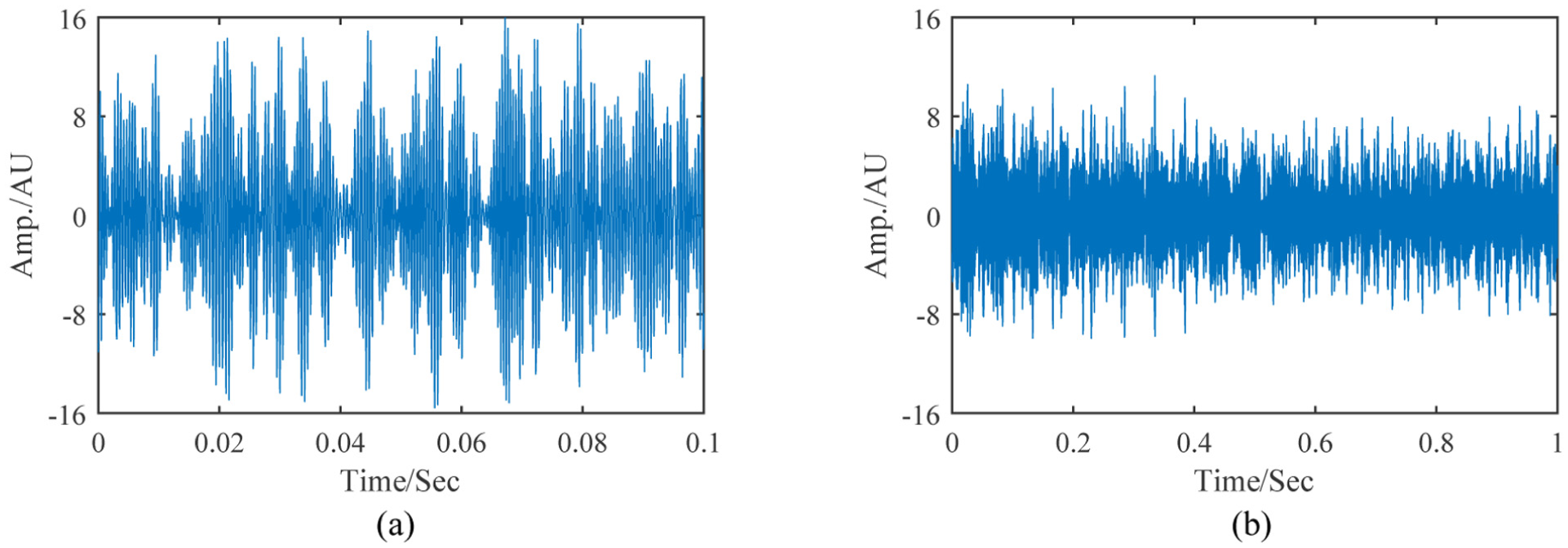
CIIC extraction comparison between AHD and IAHD for experimental signal: (a) CIIC obtained by AHD and (b) CIIC obtained by IAHD.
From Figure 10(a) and (b), it can be clearly observed that the original experimental signal is submerged by strong background noise and gear meshing components. The CIIC obtained by IAHD using optimized parameters exhibits a higher SNR, clearer pulse shapes, and less background interference. This indicates that through IRFO optimization, IAHD can more precisely extract fault features from real-world signals, providing higher-quality input for the subsequent assessment task.
Crack severity assessment accuracy
For the experimental validation, the data segmentation (1024 points, 50% overlap) and the class-wise partitioning protocol (177 training, 59 validation, and 59 testing samples) strictly follow the same standard as described in the ‘Analysis results’ section of the simulation analysis to maintain statistical consistency. On the test set, we compared the diagnostic accuracy of the conventional AHD–CNN model using empirical parameters with that of the proposed IAHD–CNN model using optimized parameters. The final assessment performance on the experimental test set is compared in Table 11. The proposed IAHD–CNN reaches the highest average diagnostic accuracy of 94.23%. In comparison, the EMD–CNN model exhibits poor performance (50.54%) due to severe mode mixing and the lack of a mathematical optimization framework. While VMD–CNN achieves 77.64%, its effectiveness remains hindered by the subjectivity involved in pre-defining its parameters. These results confirm that the IAHD–CNN framework, by bridging the consistency between modulation patterns and spectral distribution, offers a more robust foundation for intelligent gear crack severity assessment. The results indicate that by introducing adaptive parameter optimization, the model’s diagnostic accuracy was significantly improved from 75.00% to 93.75%. As an example, the accuracy curves and confusion matrices for Test 1 are shown in Figure 11(a) and (b), respectively.
Diagnostic accuracy comparison of different methods on experimental data.
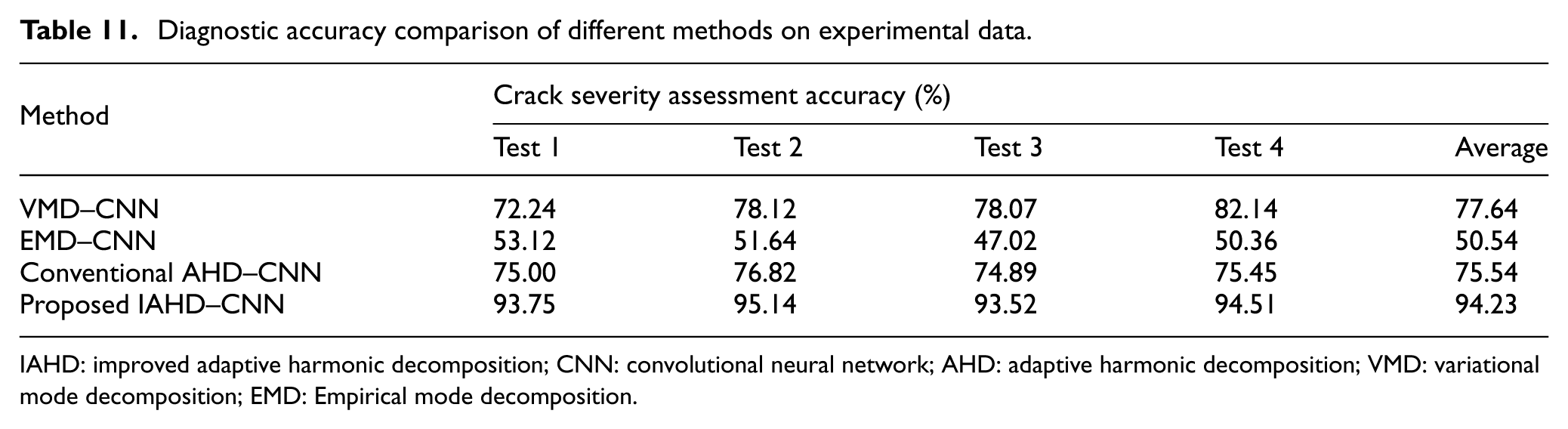
IAHD: improved adaptive harmonic decomposition; CNN: convolutional neural network; AHD: adaptive harmonic decomposition; VMD: variational mode decomposition; EMD: Empirical mode decomposition.
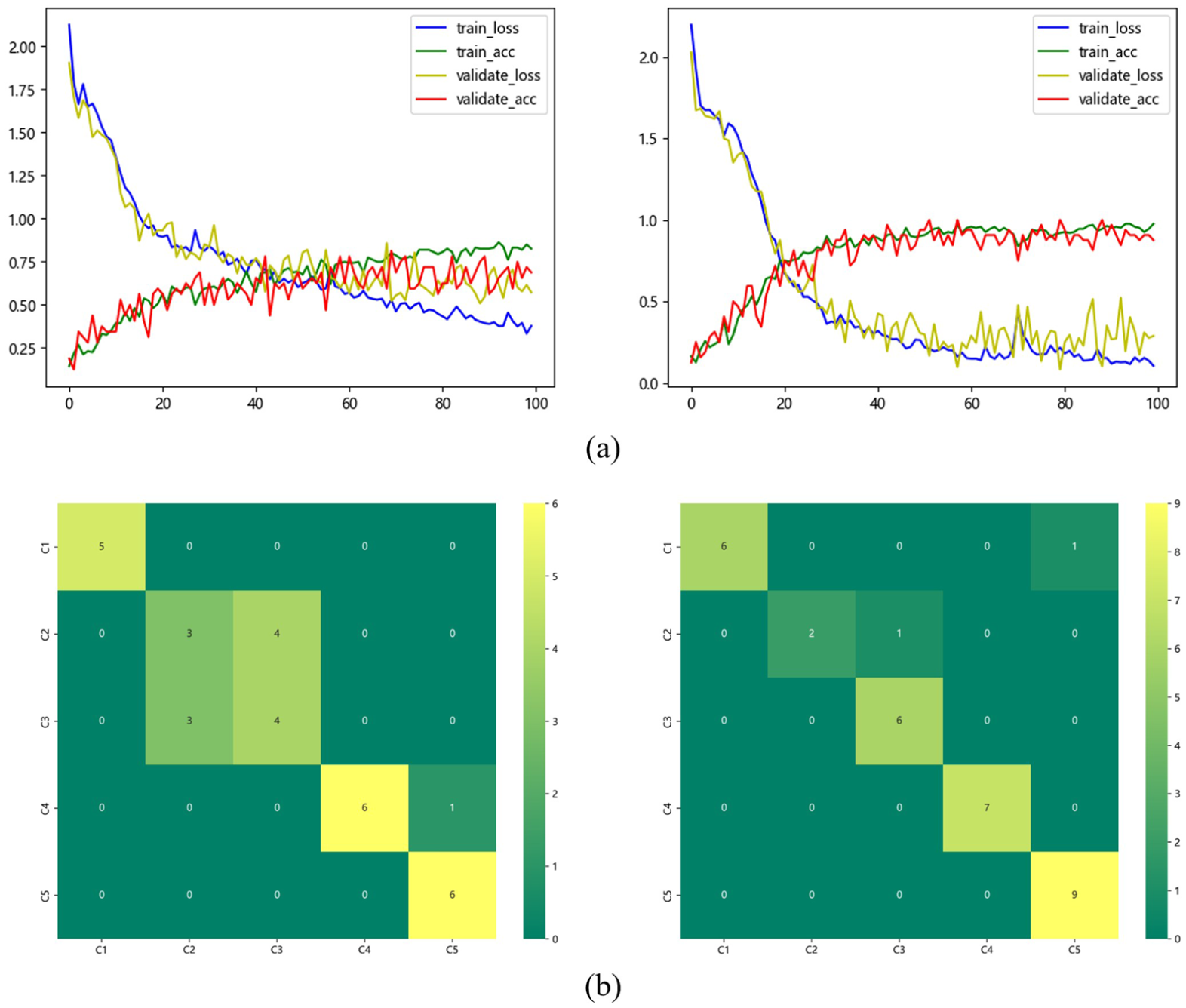
Comparison of assessment results for AHD–CNN and IAHD–CNN: (a) accuracy curves and (b) confusion matrices.
Conclusion
This study presents two primary innovations to advance the field of gear crack diagnosis. First, an IAHD method is proposed. This method ensures the precise extraction of CIIC from gear vibration signals, effectively overcoming the limitations of empirical parameter setting and limited search precision inherent in traditional methods. Second, a novel gear crack severity assessment methodology is introduced, which seamlessly integrates the IAHD with a CNN classifier into a diagnostic model. This integrated framework eliminates the need for manual feature engineering, thereby significantly enhancing the automation and accuracy of crack severity assessment.
The efficacy of these innovations is substantiated by concrete experimental results. The adaptive optimization within the IAHD method directly contributed to a remarkable improvement in assessment performance. On simulated gear crack data, the proposed IAHD–CNN framework achieved an assessment accuracy of 94.79%, representing an improvement of over 30% compared to the conventional AHD–CNN approach. This substantial gain was further validated using experimental data from a bevel gear test rig, where the diagnostic accuracy was elevated from 75.00% to 93.75%. These results quantitatively demonstrate that the proposed innovations—adaptive parameter tuning and automated process integration—not only address core methodological limitations but also translate into superior and reliable diagnostic outcomes.
While the proposed IAHD–CNN framework demonstrates superior performance in gear crack severity assessment, its practical application entails certain trade-offs. The primary advantages include the elimination of empirical parameter dependency and enhanced precision in isolating ultra-weak fault features via adaptive optimization. However, it should be noted that the iterative nature of the IRFO–AHD nested loop introduces higher computational complexity compared to conventional non-adaptive methods. Additionally, the framework’s efficacy remains partially contingent on the accurate pre-identification of the resonance frequency band. Future work will focus on improving computational efficiency, developing a fully blind adaptive decomposition strategy that integrates resonance band selection into the optimization objective, and exploring the application of the proposed method under variable-speed conditions.
Footnotes
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was financially supported by the Hunan Provincial Natural Science Foundation of China (Grant No. 2025JJ60868 and Grant No. 2025JJ60319) and the National Natural Science Foundation of China (Grant No. 52505181).
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.