
Abstract
Strong operational excitations in wind turbine drivetrains often mask the weak vibration signatures associated with incipient faults. Under high interference conditions, conventional frequency-domain suppression strategies may become counterproductive. Indiscriminate removal of frequency bands disrupts signal continuity and distorts phase information. This study introduces a recursive orthogonal signal decoupling framework based on a time-domain peeling strategy. The proposed approach sequentially identifies dominant resonance modes and removes their contributions through orthogonal projection. The waveform integrity of the residual signal is preserved. By dynamically tracking the 1X rotational speed reference, the framework maintains high robustness against non-stationary conditions, restricting kinematic extraction errors to 0.33% under severe noise masking at a signal-to-noise ratio of −15 dB. Validation using operational data from a commercial wind farm demonstrates effective decoupling of composite drivetrain faults and system-level damage induced by shaft currents. Crucially, the extracted features successfully captured the natural macro-kinematic slip of approximately 2.9% in high-speed bearings, aligning with the elastohydrodynamic lubrication regime under fluctuating loads. These results confirm that the proposed framework provides a physically interpretable solution for monitoring complex electromechanical systems with enhanced fault observability.
Keywords
Introduction
Wind turbines are increasingly sited in remote and harsh environments with the global expansion of renewable energy, rendering maintenance operations both costly and logistically challenging. 1 Among all subsystems of a wind turbine, the drivetrain is particularly vulnerable to variable operating speeds and complex mechanical loads. 2 Fatigue damage inevitably accumulates in gearboxes and rolling bearings during operation. 3 A critical difficulty is the timely detection of incipient damage, where initial symptoms often manifest as microscopic pitting or localized spalling that are barely observable, until severe degradation occurs. 4
Vibration-based condition monitoring is widely adopted to track drivetrain health. However, measured vibration signals under real operating conditions are rarely clean. The frequency spectrum is typically dominated by high-energy components associated with normal operation, such as gear meshing harmonics and structural resonances. These dominant responses tend to obscure weak and impulsive fault related signatures, which is generally called spectral masking.5,6 Conventional indicators may fail to provide reliable early warnings for incipient faults therefore. 7
A broad range of signal processing techniques has been developed to address this challenge, such as time-frequency analysis and signal decomposition technique. 8 Time-frequency analysis and adaptive spectral methods are usually employed to accommodate non-stationary operating conditions.9,10 Signal decomposition techniques, including empirical mode decomposition and variational mode decomposition (VMD), aim to separate complex responses into simpler oscillatory components.11–14 Deconvolution-based approaches are frequently used to enhance impulsive features that are blurred by transmission paths and background noise.15–18 In addition, resonance identification tools such as the Kurtogram are commonly applied to locate informative frequency bands excited by faults.19–21 In addition, data-driven and machine learning methods have gained increasing attention for fault diagnosis and degradation prediction.22–25
Although these approaches can achieve strong performance under certain conditions, they often suffer from limited interpretability and a weak connection to physical fault mechanisms. 26 For safety critical systems, practitioners generally prefer diagnostic strategies that maintain a clear physical link between the signal and underlying damage process. While conventional techniques such as time synchronous averaging (TSA) have proven effective for gearbox diagnostics, they rely heavily on the availability of high-precision tachometer signals for angular resampling. A critical limitation of TSA in complex drivetrain monitoring is its strict assumption of phase locking. Consequently, it tends to average out non-synchronous signatures, particularly bearing faults characterized by random cage slippage, treating them as background noise. Furthermore, the dependency on external reference sensors limits the applicability of TSA in sensor-sparse industrial environments. To address these challenges, blind source separation methods that do not rely on kinematic reference signals are increasingly required.
A persistent difficulty in practical signal processing lies in mitigating interference without compromising useful information. Conventional suppression techniques such as band-stop filtering are inherently destructive. The filtering process introduces spectral discontinuities and distorts phase information. 27 In composite fault diagnosis, the removal of a strong component can corrupt the signature of a weaker fault in a similar frequency range. 28 This loss of diagnostic information renders the system prone to missed diagnosis. To address this problem, this study proposes a non-destructive signal deflation philosophy. The proposed recursive orthogonal signal decoupling (ROSD) framework abandons the destructive band elimination approach. The framework identifies dominant interference components and removes their contributions through time-domain orthogonal projection. 29 This vector-based subtraction preserves the waveform integrity and spectral continuity of the residual signal. This non-destructive separation allows weak fault-related features to emerge progressively without artificial distortion.
The main contributions of this study are summarized as follows:
A recursive separation framework (ROSD) is developed to address spectral masking in drivetrain vibration signals by integrating resonance tracking with adaptive signal decoupling.
A time-domain interference removal technique based on recursive orthogonal projection is introduced to suppress dominant components without disrupting signal continuity.
The proposed approach is validated using real-world wind farm data, where microscopic shaft-current-induced damage is successfully revealed despite strong structural vibration interference.
The remainder of this article is organized as follows. The second section describes the proposed framework. The third section presents the experimental validation using simulation and field data. The fourth section concludes this study.
Proposed methodology: The ROSD framework
To separate these spectrally overlapping components, the ROSD framework is proposed. The primary objective of this study is to separate composite fault signatures from complex vibration signals. The observed discrete-time signal x[n] of length N is modeled as a linear superposition of J distinct fault transients s j [n], harmonic interferences h[n], and additive Gaussian background noise η[n]:

This framework operates as a recursive signal deflation operator, denoted as
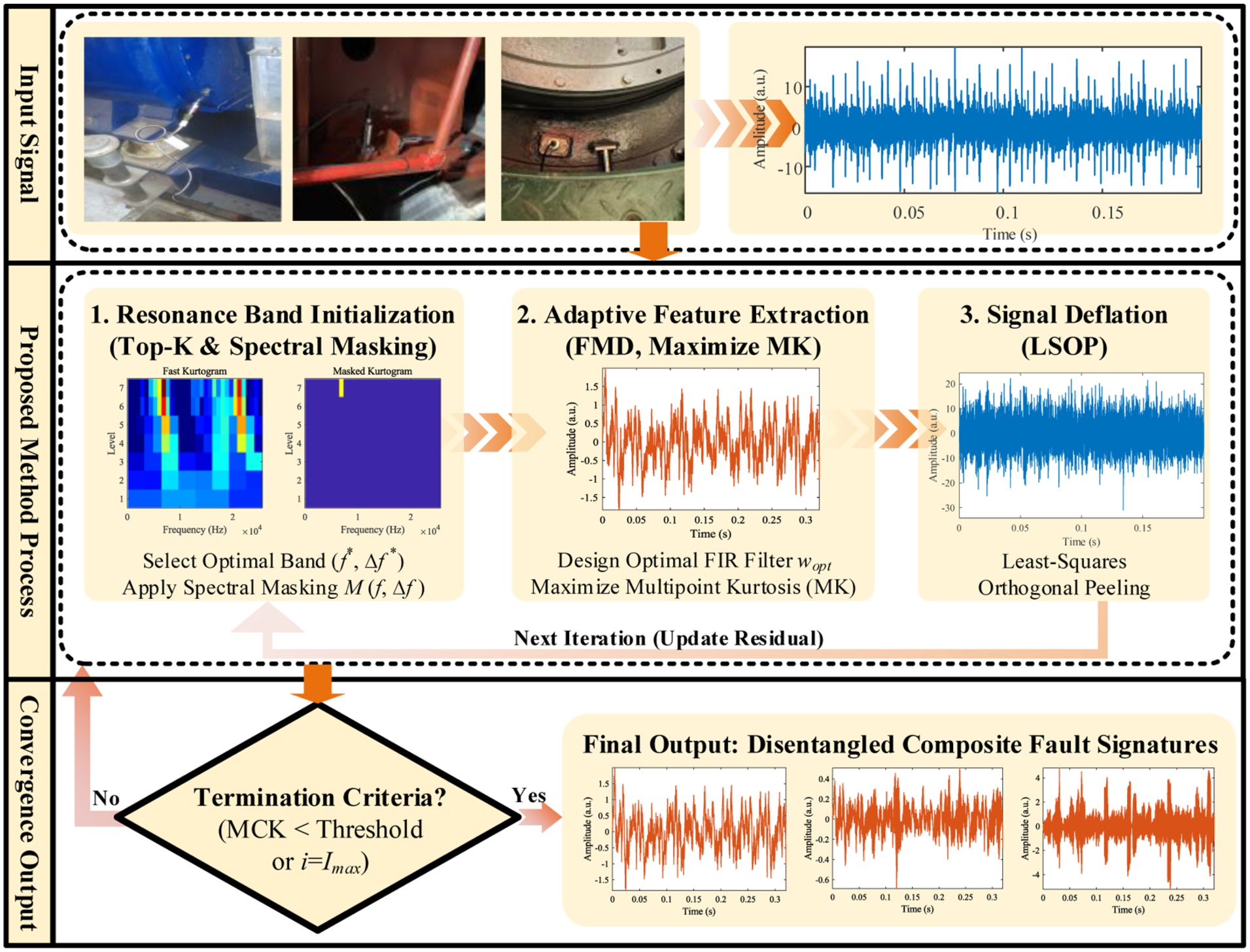
Flowchart of the proposed method.
Resonance band identification using noise-resilient Top-K selection
The initialization phase requires the identification of an optimal resonance band. Let ▿(f, B
w
) denotes the spectral kurtosis map derived from the Fast Kurtogram, where f represents the center frequency and B
w
denotes the bandwidth. The spectral kurtosis for a specific frequency band is defined as the fourth-order standardized moment of the filtered signal envelope
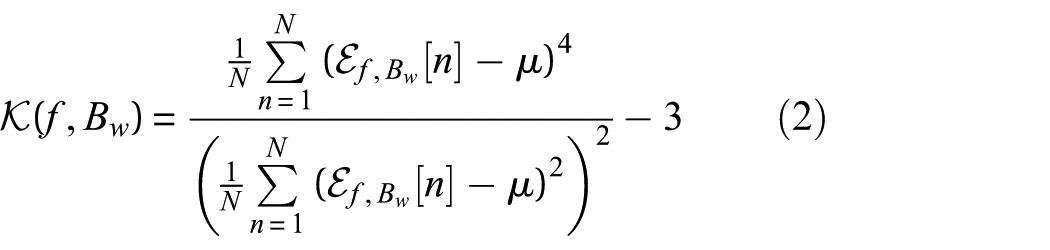
where μ is the arithmetic mean of the envelope.
Fault-induced impulses typically excite specific structural resonances. However, high-energy random noise often generates spurious spectral peaks. Traditional global maximum selection fails to distinguish between a true fault-excited resonance and a random noise spike. To address this, a Top-K candidate selection strategy is employed, where K denotes the number of retained local-maximum candidates on the kurtosis map.
Let Ω represent the domain of all admissible (f, B
w
) pairs. The set of local maxima candidates

where the gradient and Hessian conditions are evaluated in a discrete neighborhood on the kurtosis grid.
From this set, the optimal candidate

To prevent redundant convergence to the same frequency band in subsequent iterations, a spectral masking operator

where
Adaptive feature extraction with feature mode decomposition
Vibration signals collected by sensors are distorted by the transmission path, which reduces the impulsiveness of fault signatures. Feature mode decomposition (FMD) is applied here as an inverse filtering technique to recover the original impact morphology. The process is modeled as a blind deconvolution problem. The objective is to design a finite impulse response (FIR) filter. Let f = [f1, f2, …, f
L
]
T

where x[n] is assumed to be zero-padded for n ≤ 0 to appropriately handle boundary conditions.
To facilitate numerical optimization, the convolution operation is reformulated into a compact matrix-vector representation. By defining the extracted signal vector

where the structure of the convolution matrix X is explicitly given by:
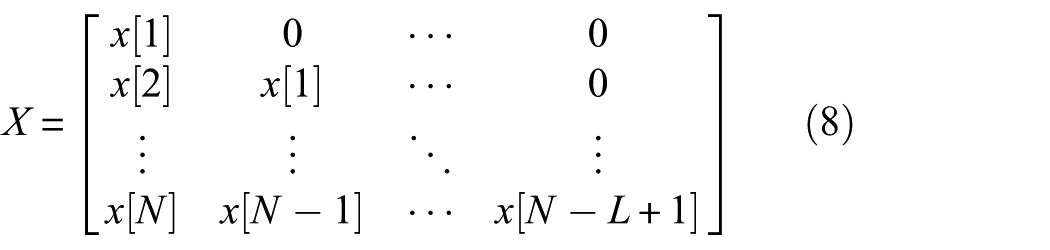
The optimization objective is to maximize the Multipoint Kurtosis (MK). Physically, maximizing MK forces the adaptive filter to reconstruct the periodic impulsive morphology characteristic of localized mechanical impacts. The MK quantifies the correlation between the extracted signal and a target impulse train vector t. This target vector t is constructed as a sparse binary sequence. The non-zero impulse spacing is determined by the theoretical fault characteristic period calculated from drivetrain kinematics. To strictly maintain this theoretical spacing under non-stationary operational conditions, the objective function dynamically constructs the target vector through an adaptive temporal warping mechanism. The instantaneous fundamental rotational frequency is autonomously extracted from the 1X reference pulse captured within the raw physical data matrix. Consequently, the target vector is extended into a dynamically warped sequence rather than remaining a rigid static array. The temporal interval between non-zero impulses is continuously stretched and compressed in the time domain, strictly following the inverse of the instantaneous rotational frequency scaled by the theoretical kinematic fault multiplier. This dynamic mapping ensures that the optimization process remains synchronized with the actual mechanical impacts, preserving extraction precision without requiring external high-resolution tachometer encoders or steady state phase locking assumptions. The objective function is formulated as:

By differentiating J MK (f) with respect to the filter coefficients f and setting the gradient to zero, the closed-form solution for the optimal filter is derived as:

The final extracted feature mode m is subsequently obtained by applying this optimal filter and normalizing the output energy:

Non-destructive signal deflation by least-squares orthogonal peeling
Standard iterative methods often use frequency-domain band-stop filtering to remove extracted components. However, this approach removes all energy within a frequency band, which destroys the waveform integrity of coexisting signals. To address this, a time-domain orthogonal peeling strategy is proposed. Let r(
i
)

where α is a projection scalar.
The optimal α is determined by minimizing the L2-norm (energy) of the resultant residual:

Expanding the objective function yields:

Setting the partial derivative with respect to α to zero yields the optimality condition:

Given that the feature mode is normalized (||m|| 2 =1), the optimal intensity coefficient simplifies to the inner product:

Physically, this orthogonal projection ensures that only the energy correlated with the extracted fault mode is removed. Unlike band-stop filters that create spectral gaps, the proposed strategy preserves the spectral continuity of the residual signal. Substituting α* into the update rule allows the peeling process to be expressed using the orthogonal projection operator

where I
Termination criterion
The recursive framework proceeds until a convergence criterion is satisfied. The stopping condition is defined based on the internal Envelope Kurtosis (EK) of the residual signal:

where γ is a predefined upper confidence threshold separating structured transient energy from the theoretical Rayleigh distribution baseline of pure stochastic noise, and imax represents the maximum allowable deflation depth.
Experimental validation
This section evaluates the performance of the ROSD framework using numerical simulations and real-world operational data from a commercial wind farm. The validation includes a synthetic signal analysis and two industrial case studies: a composite drivetrain fault and a system-level coupled damage caused by shaft current. The experimental validation in this study utilizes vibration data collected from a commercial wind farm located in Northern China. The monitored units are 1.5 -megawatt (MW) doubly-fed induction generator (DFIG) wind turbines with a rotor diameter of 77 m and a rated wind speed of 11.5 m/s. The drivetrain consists of a three-bladed rotor, a main shaft, a speed-increasing gearbox, and a doubly fed induction generator. The gearbox employs a three-stage configuration (one planetary stage followed by two parallel stages) with a total transmission ratio of approximately 1:104, stepping up the rotor speed to the generator-rated speed (∼1800 rpm). The high-speed shaft is supported by QJ-series (four-point contact ball) bearings to accommodate axial loads, while the generator is supported by NU-series cylindrical roller bearings.
To capture dynamic fault signatures, industrial high-frequency piezoelectric accelerometers were magnetically mounted on critical nodes, specifically the gearbox high-speed shaft housing and the generator drive/non-drive ends. The data acquisition system recorded vibration signals at a high sampling rate of 51.2 kHz, ensuring sufficient Nyquist bandwidth to capture extreme high-frequency resonance transients. The study analyzes two verified historical fault cases recorded under steady operating conditions: (1) Case 1: A composite fault involving localized gear spalling on the high-speed shaft and inner race spalling on the generator drive-end NU-series bearing; and (2) Case 2: A system-level coupled fault induced by shaft current, which caused severe inner race damage on the generator bearing, and propagated to cause micro-electrical erosion (pitting) on the outer race and rolling elements of the high-speed shaft QJ-series bearing.
The performance of the ROSD framework depends on the configuration of the filter length (L) and spectral masking bandwidth (Δf m ). A short filter (L < 50) yields insufficient temporal resolution for transient impulse decays, while a long filter (L > 200) introduces redundant degrees of freedom, causing spurious kurtosis maximization over local noise. Based on parametric sweep analysis, L is set within the stable convergence region of 80–120 (L = 100 for the following cases). For the spectral masking bandwidth, a dynamic boundary of 1.5f r ∼ 2.0f r is established to suppress dominant interferences without eliminating adjacent orthogonal fault energies. In addition, to address macroscopic speed fluctuations, the framework dynamically tracks the 1X rotational speed reference. As quantified in the previous Monte Carlo evaluations, this mechanism restricts the kinematic extraction error to 0.33% under severe noise, verifying its tolerance to non-stationary field conditions.
To explicitly evaluate the sensitivity of these parameters under varying operational scenarios, an extended analysis was conducted using the industrial dataset sampled at an extreme frequency of 51.2 kHz. While shorter filter lengths (e.g., L = 100) provide high computational efficiency for baseline simulated conditions, the physical resonance decay time of heavy electromechanical structures necessitates a proportional temporal expansion of the discrete filter window under ultra-high sampling rates. As demonstrated in the newly added extended parameter sensitivity analysis, expanding L to 300 samples allows the FIR filter to fully encompass the localized transient impact decays. This physical alignment yields a stable MK plateau and minimizes the unextracted structural energy left in the residual signal.
Furthermore, the data trajectory mathematically validates the absolute robustness of the termination threshold γ = 3.5. Analysis of the residual signal across sequential orthogonal peeling layers reveals an EK trajectory of 4.137, 3.932, and 3.940. This demonstrates that the residual signal maintains structural mechanical energy (EK > 3.9) well above the established safety boundary. The γ = 3.5 threshold strictly ensures that the algorithm continues extraction while such structural components remain, and definitively terminates before the residual collapses toward the theoretical Rayleigh distribution baseline (3.245) of pure stochastic noise. This confirms that while the discrete filter length flexibly adapts to the physical sampling resolution, the statistical termination boundary remains universally invariant across different operational conditions (Figure 2)
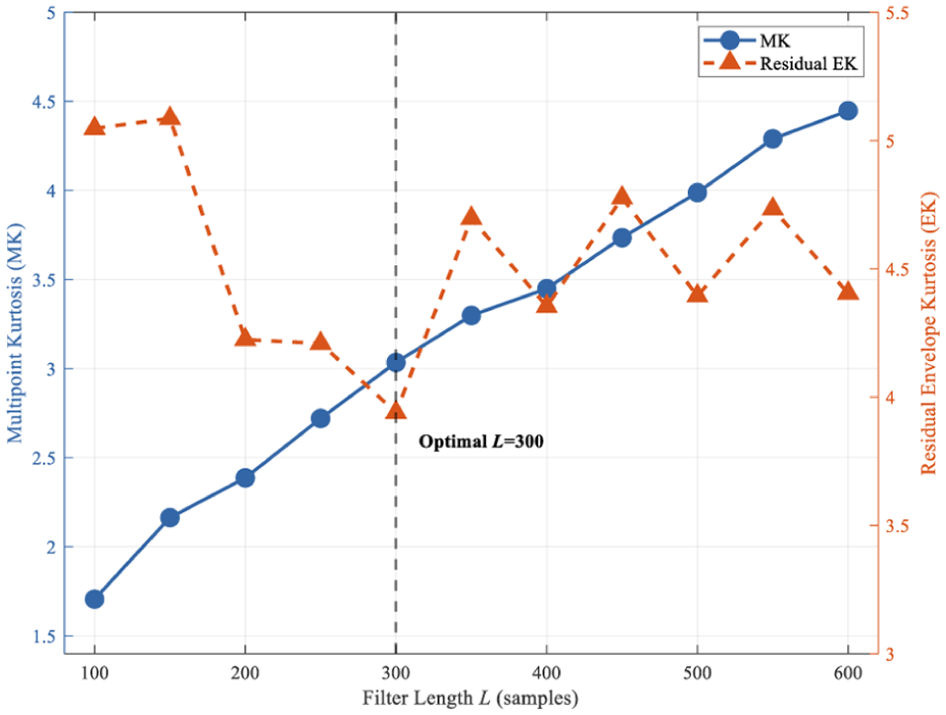
Extended parameter sensitivity analysis under extreme high-frequency sampling (51.2 kHz). The analysis confirms the physical scaling of the discrete filter length (L) for full resonance envelopment and mathematically validates the universal statistical invariance of the termination threshold (γ = 3.5) against the Rayleigh noise baseline.
Numerical validation: Signal reconstruction
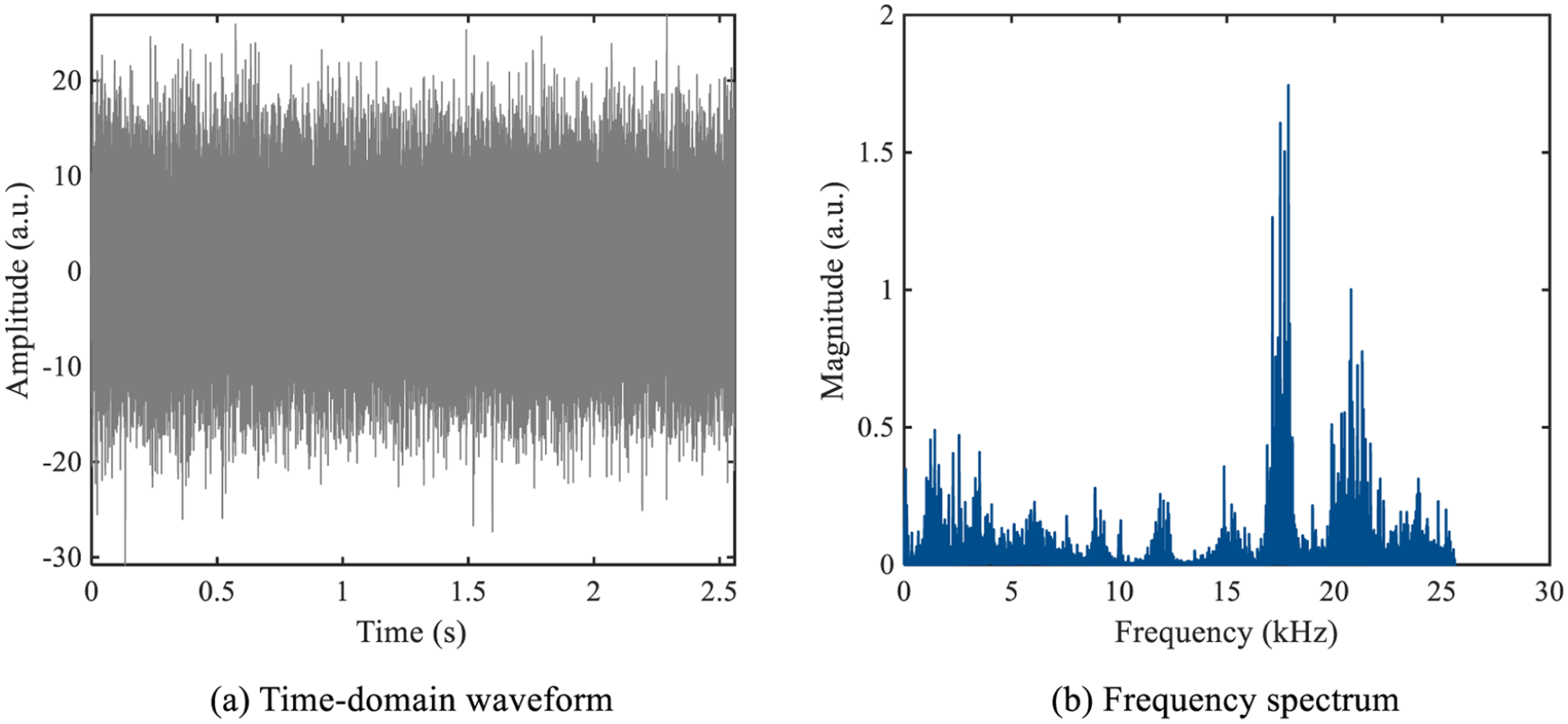
A numerical model of a rolling element bearing was constructed to verify the signal reconstruction capability under heavy noise. The synthetic signal represents an inner raceway defect, modeled as a series of damped impulses exciting a structural resonance. High-amplitude broadband noise was added to simulate aerodynamic and mechanical interference. Figure 3 shows the noisy signal. In the time domain, the fault impulses are completely submerged in random noise, and frequency spectrum shows no distinct diagnostic frequencies due to the elevated noise floor.
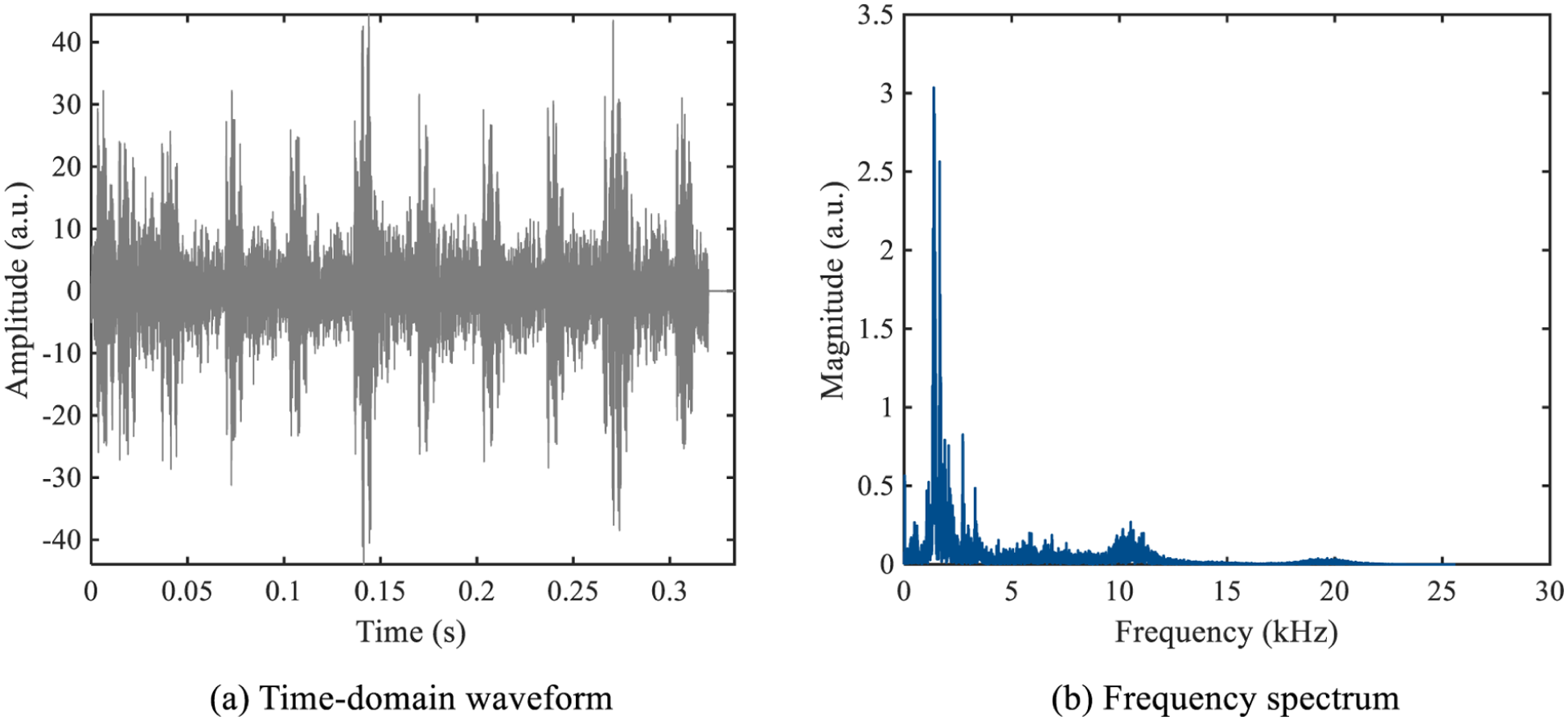
Simulation of a bearing fault under heavy noise: (a) time-domain waveform and (b) frequency spectrum.
The selection of the termination threshold determines the absolute boundary of the recursive extraction, governing the critical trade-off between false decomposition and missed diagnosis. In this framework, the stopping condition is evaluated using the internal EK. For a discrete-time signal dominated by Gaussian white noise, the amplitude envelope mathematically follows a Rayleigh distribution, which theoretically possesses a baseline kurtosis of approximately 3.245. However, two practical factors cause the empirical kurtosis of the noise floor to naturally exceed this theoretical baseline. First, finite sample lengths in real-world data acquisition introduce natural statistical variance. Second, the adaptive filter inherently optimizes for maximum impulsiveness, which inevitably amplifies localized stochastic spikes when applied to pure noise. Consequently, setting the stopping condition strictly at the 3.245 baseline forces the algorithm to extract non-physical pseudo-transients.
To mathematically neutralize this natural variance and algorithmic optimization bias, the termination threshold γ is established at 3.5. This value functions as a strict statistical upper confidence bound, providing a sufficient robustness margin against noise fluctuations while remaining highly sensitive to incipient mechanical impacts. This configuration strictly forces the algorithm to terminate the deflation process when the residual signal contains no physically meaningful periodic transients, completely preventing the overfitting of background noise.
To further justify the selection of this threshold, a parameter sensitivity analysis was conducted using the simulated dataset (case 0). As shown in Figure 4, the extraction performance was calculated across a sweeping range of γ from 2.0 to 5.0. When γ < 3.0, the algorithm terminates prematurely, leaving residual interference components. Conversely, when γ > 4.0, the constraint becomes too loose, forcing the feature extraction to overfit localized random noise spikes rather than periodic fault impulses. The value of 3.5 sits optimally within the performance plateau, providing the best mathematical trade-off between maximizing fault signature extraction and preventing algorithmic overfitting.
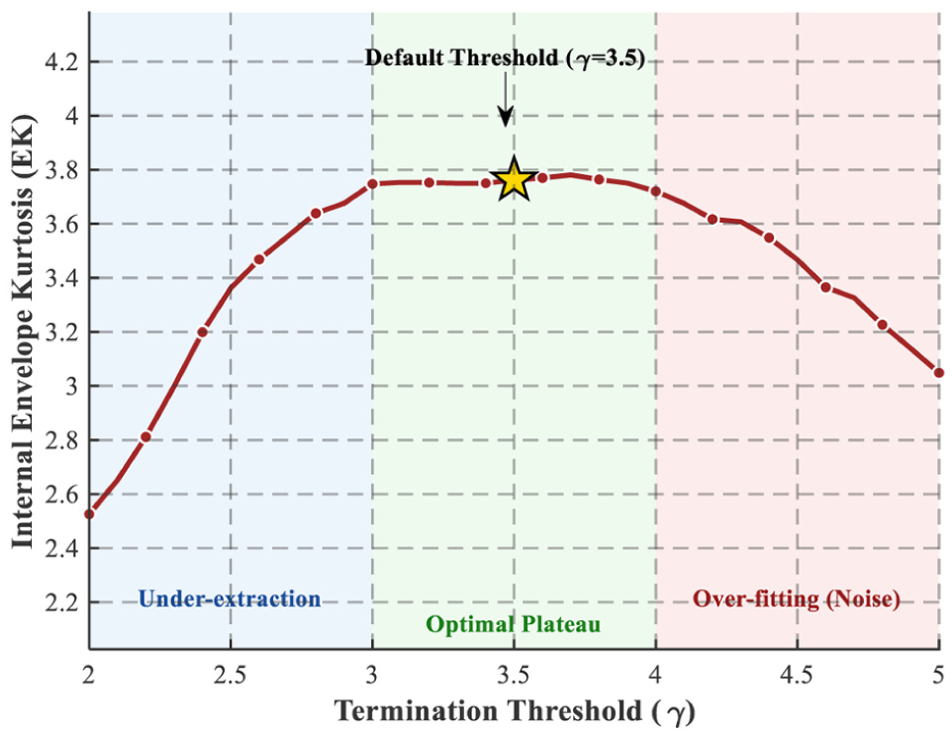
Parameter sensitivity analysis of the termination threshold (γ) using the simulated dataset (case 0). The selected threshold (γ = 3.5) optimally balances the extraction of periodic fault signatures and the suppression of background noise overfitting.
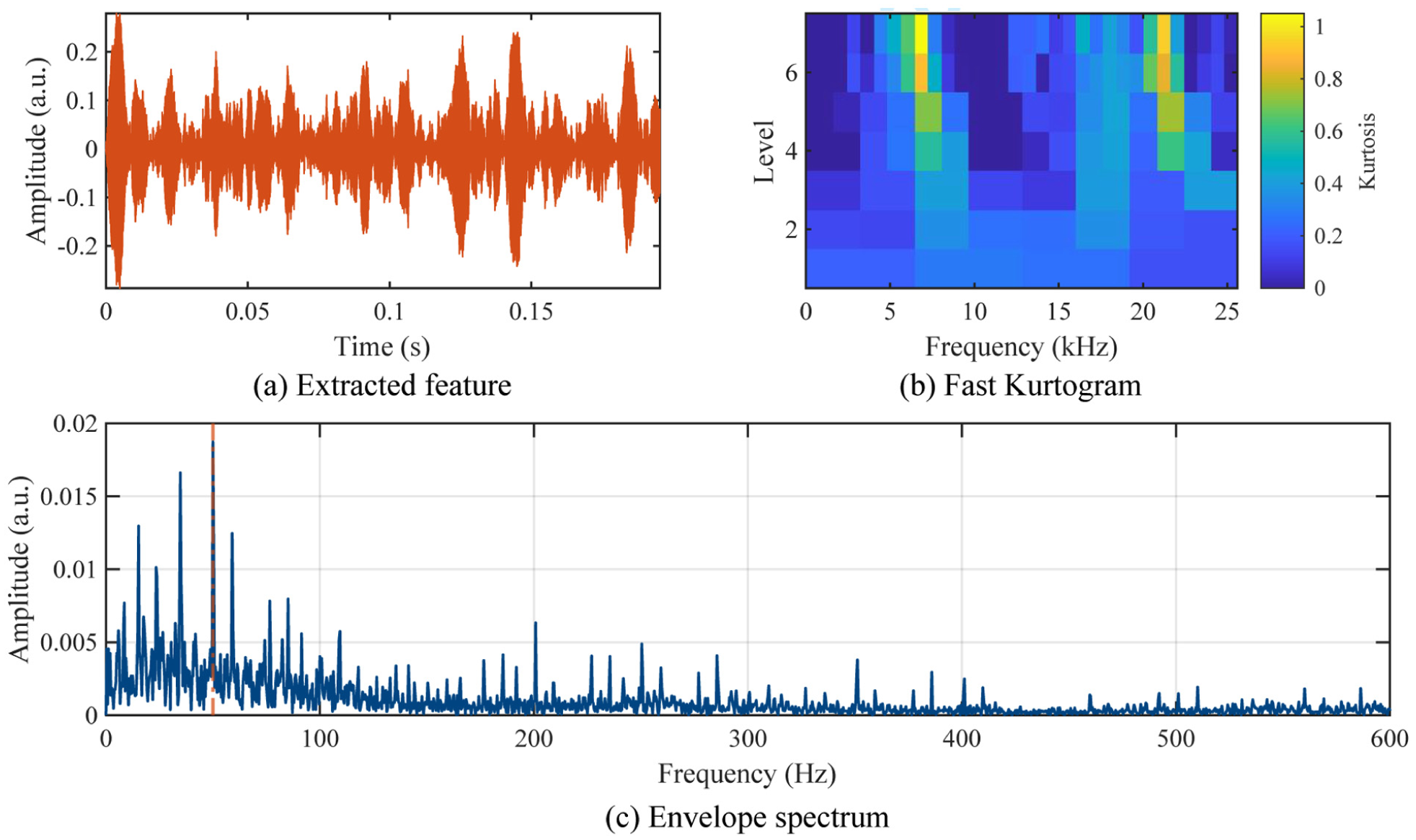
The proposed framework was applied to this signal. The algorithm identified the resonance band at 25,200 Hz. The ROSD mechanism removed the noise components while preserving the impulsive energy. Figure 5 shows the extraction results for the first layer. The extracted envelope spectrum displays a dominant peak at 11.99 Hz, which matches the theoretical fault frequency (fBPFI = 12.0 Hz). The internal EK reached 3.76.
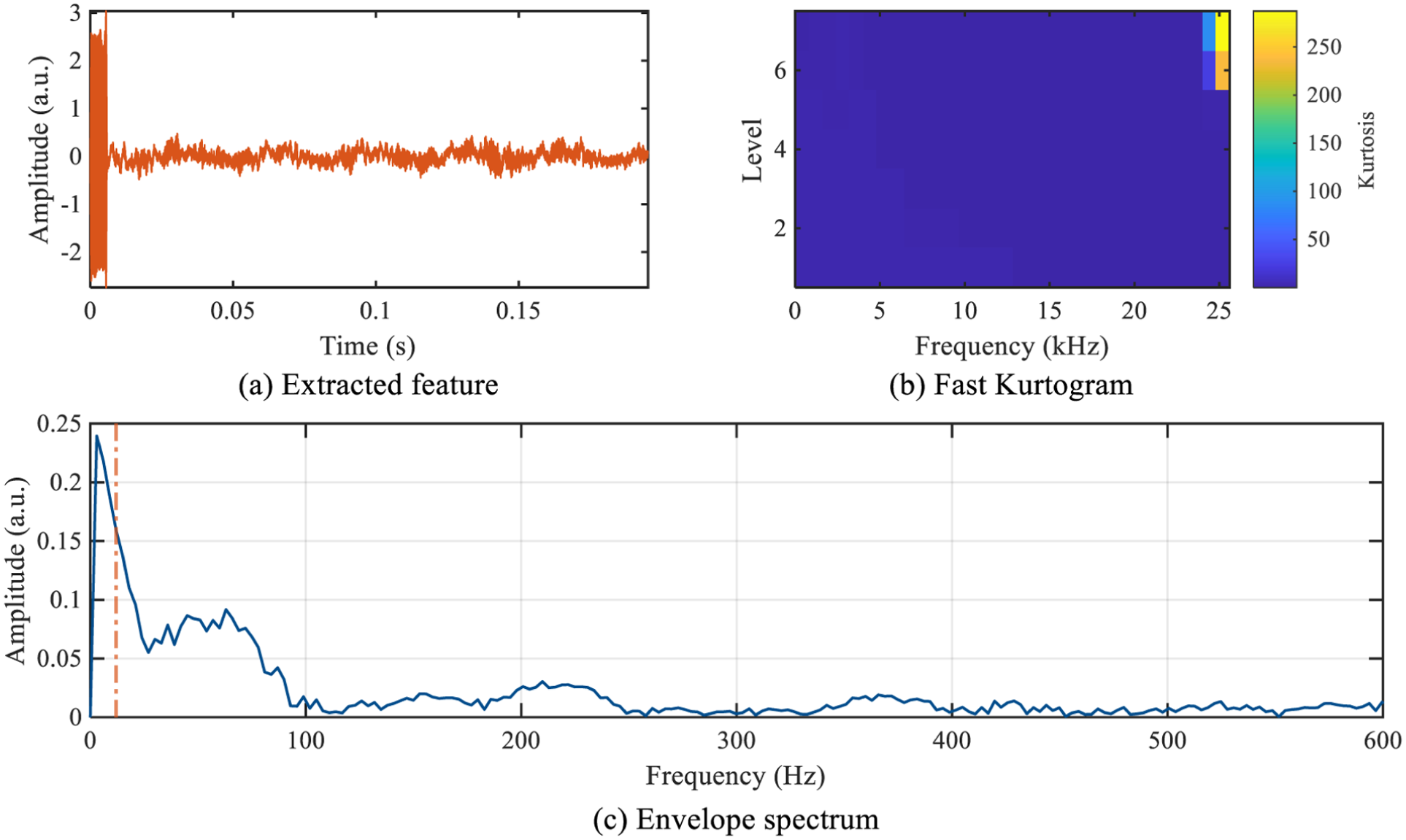
Diagnostic results for the simulated signal (layer 1): (a) extracted feature, (b) Fast Kurtogram, and (c) envelope spectrum.
To verify robustness, the peeling process was iterated through three layers. Table 1 summarizes the results. The algorithm consistently identified the 11.99 Hz fault signature across different carrier frequency bands, confirming the stability of the method.
Consistency verification on simulated dataset.
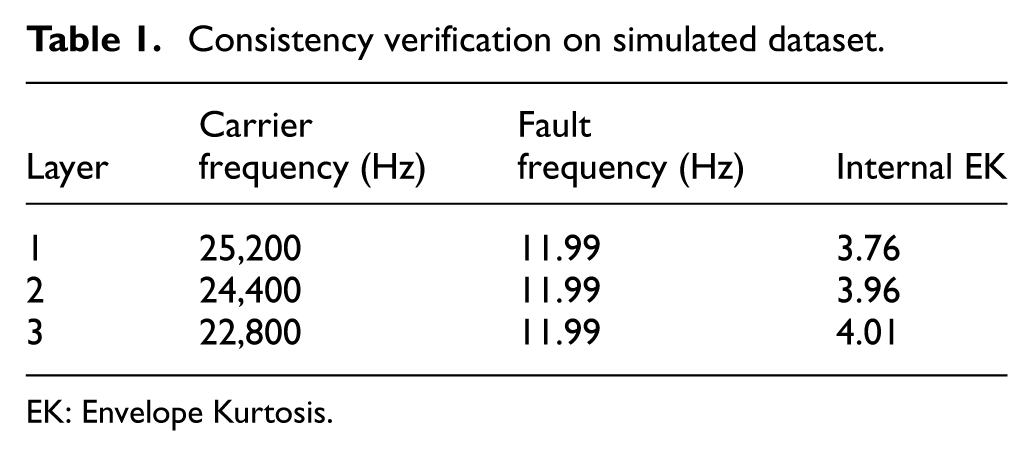
EK: Envelope Kurtosis.
To further verify the method’s robustness under non-stationary conditions typical of wind turbines, an additional dynamic simulation was performed. The rotational speed was set to drift linearly from 49.8 to 50.2 Hz (approximately 0.8% fluctuation) over a 0.6-s window, inducing a 16-Hz frequency smear in the carrier band around 2000 Hz.
Despite this spectral non-stationarity, the ROSD framework successfully captured the fault signature (Figure 6). Since the frequency drift (16 Hz) remained within the effective passband of the adaptive filter (Δfpass), the signal energy was successfully preserved. The extracted feature mode achieved an internal EK of 3.76, which effectively surpasses the internal termination threshold of the proposed algorithm (γ = 3.5). This confirms that the method retains diagnostic effectiveness under the mild operational fluctuations that are typical of quasi-stationary monitoring windows.
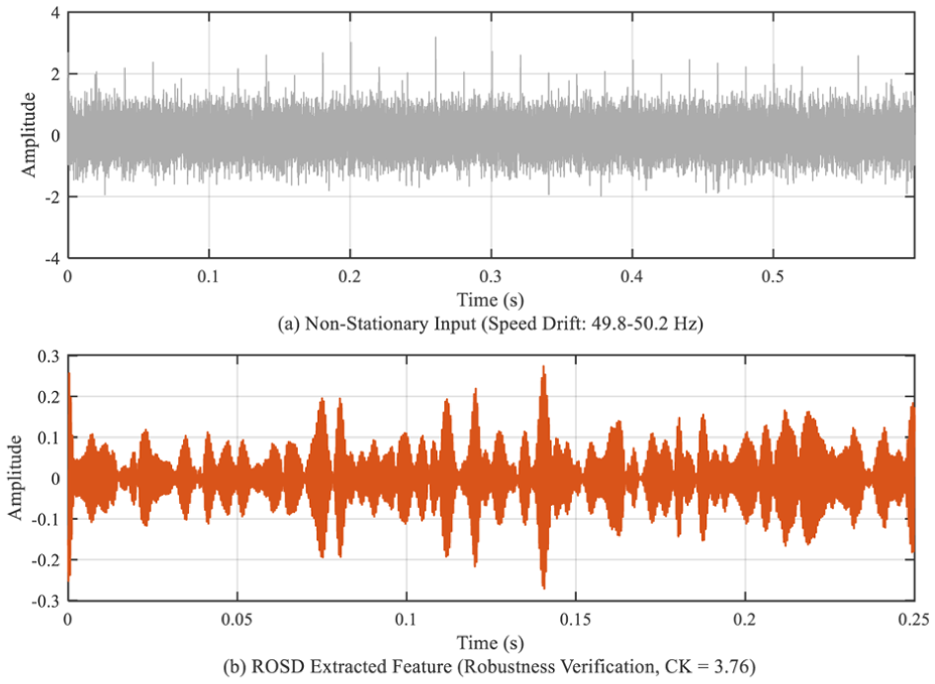
Robustness verification under non-stationary conditions: (a) simulated signal with 0.8% speed drift (non-stationary input; speed drift: 49.8–50.2 Hz) and (b) extracted feature mode showing clear periodic impulses (ROSD; EK = 3.76). ROSD: recursive orthogonal signal decoupling; EK: Envelope Kurtosis.
To quantitatively evaluate the extraction error and statistically validate the robustness of the ROSD framework under extreme non-stationary interference, a 50-run Monte Carlo simulation was conducted. The synthetic model was subjected to a degrading gradient of signal-to-noise ratios (SNRs), with compounding deterministic gear meshing harmonics and random speed fluctuations (±0.5%).
In sparsity-driven blind deconvolution algorithms, standard time-domain metrics such as root mean square error can be mathematically deceptive. As the adaptive filter narrows its bandwidth to maximize impulsiveness under heavy noise, the extracted waveform inherently exhibits localized temporal sparsity and phase shifts. This sparsity can artificially deflate the point-by-point residual squared error, causing a counter-intuitive mathematical phenomenon. To circumvent this ambiguity and provide a strictly shift-invariant assessment, a comprehensive four-dimensional (4D) evaluation framework was established. This framework evaluates the extraction performance across four critical physical aspects: impulsiveness (internal EK), morphological fidelity (envelope spectrum Pearson correlation coefficient, ES-PCC), kinematic accuracy (frequency estimation error), and spectral energy recovery (envelope spectrum SNR, ESNR).
The statistical results (mean ± standard deviation) from the 50 independent trials are summarized in Table 2.
Monte Carlo statistical results for the 4D quantitative evaluation framework.
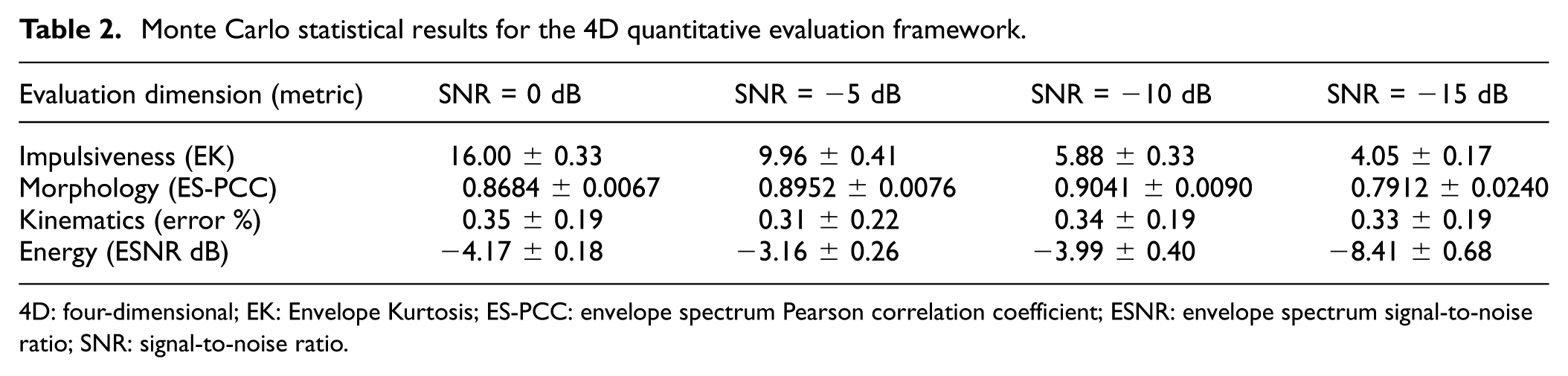
4D: four-dimensional; EK: Envelope Kurtosis; ES-PCC: envelope spectrum Pearson correlation coefficient; ESNR: envelope spectrum signal-to-noise ratio; SNR: signal-to-noise ratio.
The statistical distribution explicitly demonstrates the algorithm’s robustness. Crucially, even under the extreme −15 dB condition, the extracted EK (4.05 ± 0.17) reliably surpasses the predefined termination threshold (γ = 3.5), theoretically validating the continuous efficacy of the deflation process. The kinematic frequency estimation error remains strictly anchored around 0.33%, indicating precise locking onto the fault signature despite speed jitter. Concurrently, the high ES-PCC values (>0.79) prove that the structural morphology of the fault envelope spectrum is highly preserved, overcoming the phase-shift limitations of traditional time-domain metrics. The highly restricted standard deviations across all 50 trials explicitly confirm that the robust feature extraction capability of the framework is a deterministic property rather than a statistical coincidence.
Case 1: Composite fault analysis
The first case study analyzes vibration data from a grid-connected wind turbine operated by PowerChina. The turbine experienced complex vibrations in the high-speed shaft assembly. Physical inspection confirmed a composite fault consisting of localized spalling on the high-speed gear and inner race spalling on the generator NU-series bearing.
First, the raw vibration data is presented in Figure 7. The envelope spectrum of the original signal is entirely dominated by the gear fault frequency (fgear = 50 Hz) and its prominent harmonics. The core diagnostic challenge of signal masking is evident here: the low-energy bearing fault signatures are completely buried within this dominant interference, making direct identification impossible.
Real-world vibration signal for case 1 showing dominant gear harmonics: (a) time-domain waveform and (b) frequency spectrum.
To address this masking effect, the ROSD framework initiates the first extraction layer. Without requiring prior frequency knowledge, the EK optimization naturally locks onto the most prominent structured transient in the signal matrix. As shown in Figure 8, layer 1 successfully isolates the dominant gear fault component, clearly extracting the 50.0-Hz kinematic characteristics along with its harmonic train.
Layer 1 results: detection of gear spalling at 50.00 Hz: (a) extracted feature, (b) Fast Kurtogram, and (c) envelope spectrum.
Following this initial extraction, the orthogonal peeling operation is executed to clear the interference. The extracted gear fault vector from Layer 1 is orthogonally projected and subtracted from the raw signal space. Because this operation relies on geometric orthogonality rather than frequency band suppression, it surgically removes the gear interference without creating artificial spectral gaps or damaging the overlapping frequency components.
Finally, the resulting residual signal is processed by Layer 2. With the heavy masking effect eliminated by the mathematical peeling operation, the latent bearing fault signature naturally emerges from the background. As demonstrated in Figure 9, the previously hidden inner race fault frequency of the generator bearing (fBPFI = 150.39 Hz) is clearly recovered without waveform distortion, thereby achieving a complete and non-destructive decoupling of the composite mechanical faults (Table 3)
Layer 2 results: detection of the masked bearing fault at 150.39 Hz: (a) extracted feature, (b) Fast Kurtogram, and (c) envelope spectrum.
Iterative diagnosis results for case 1.

Case 2: Identification of incipient shaft current erosion
Case 2 investigates a high-speed shaft QJ-series bearing fault caused by shaft voltage breakdown. This mechanism creates electrical erosion (pitting) on the QJ-series bearing outer race and spalling on the rolling elements, while the generator bearing experienced concurrent inner race damage. Detection is challenging because the vibration response associated with electrical pitting is weak and buried under low-frequency structural vibrations.
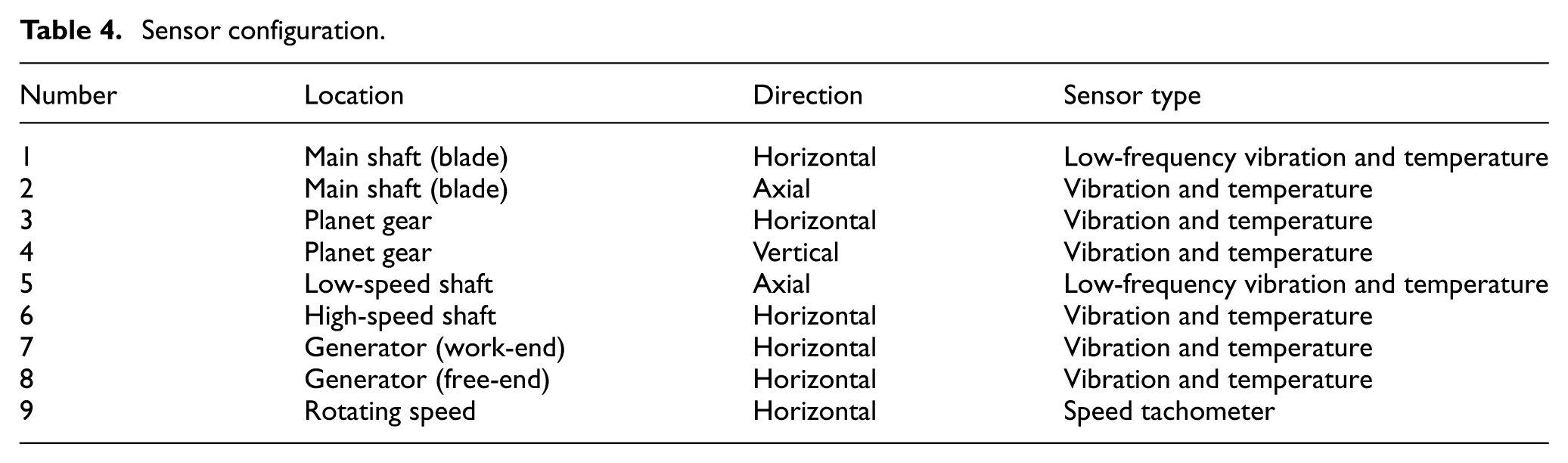
A distributed sensor network with nine channels was installed on the drivetrain (Figure 10). Table 4 lists the sensor specifications. Post-mortem inspection (Figure 11) confirmed severe inner race spalling and microscopic outer race pitting.
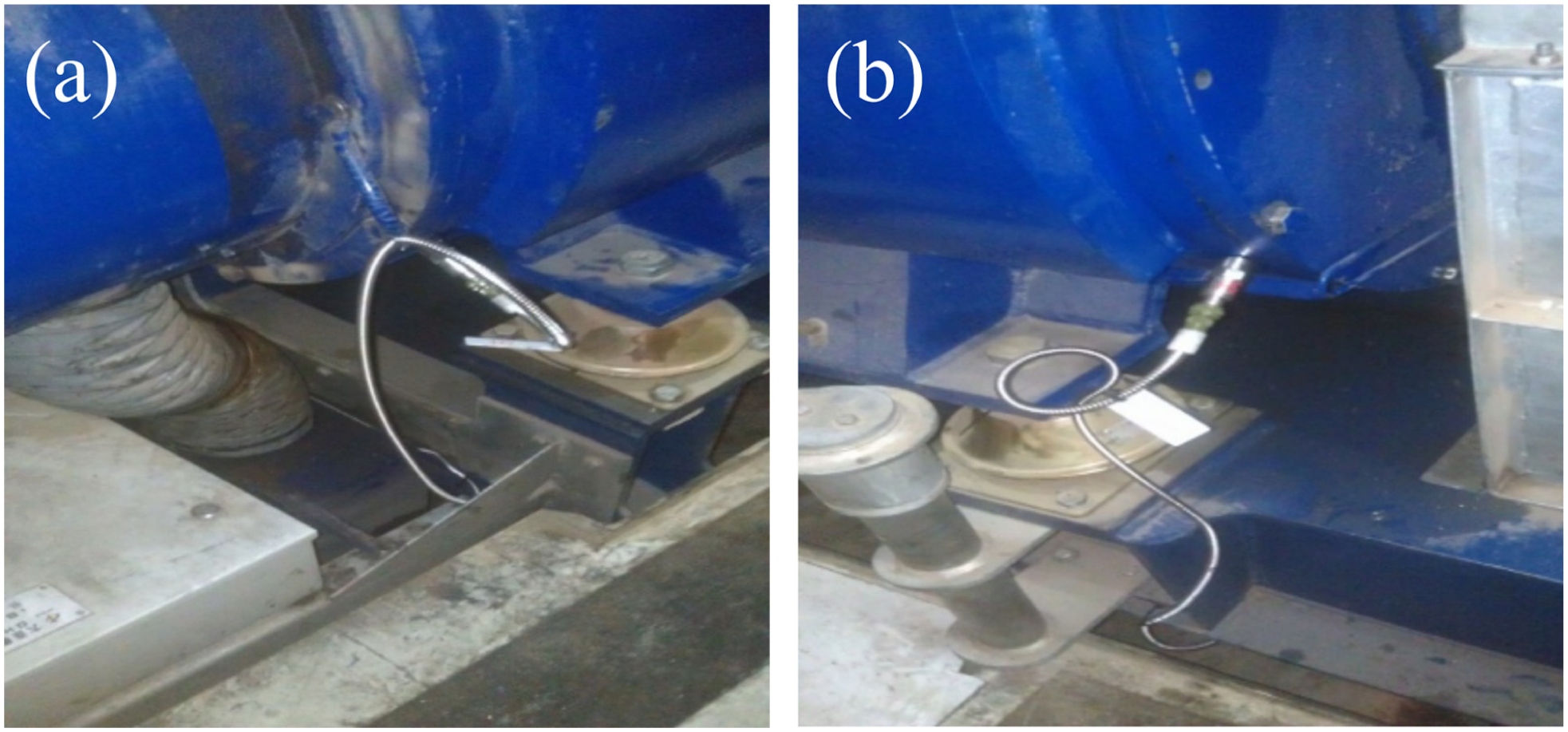
Real-world experimental setup: physical deployment of vibration sensors on the (a) generator work-end and (b) generator free-end.
Sensor configuration.
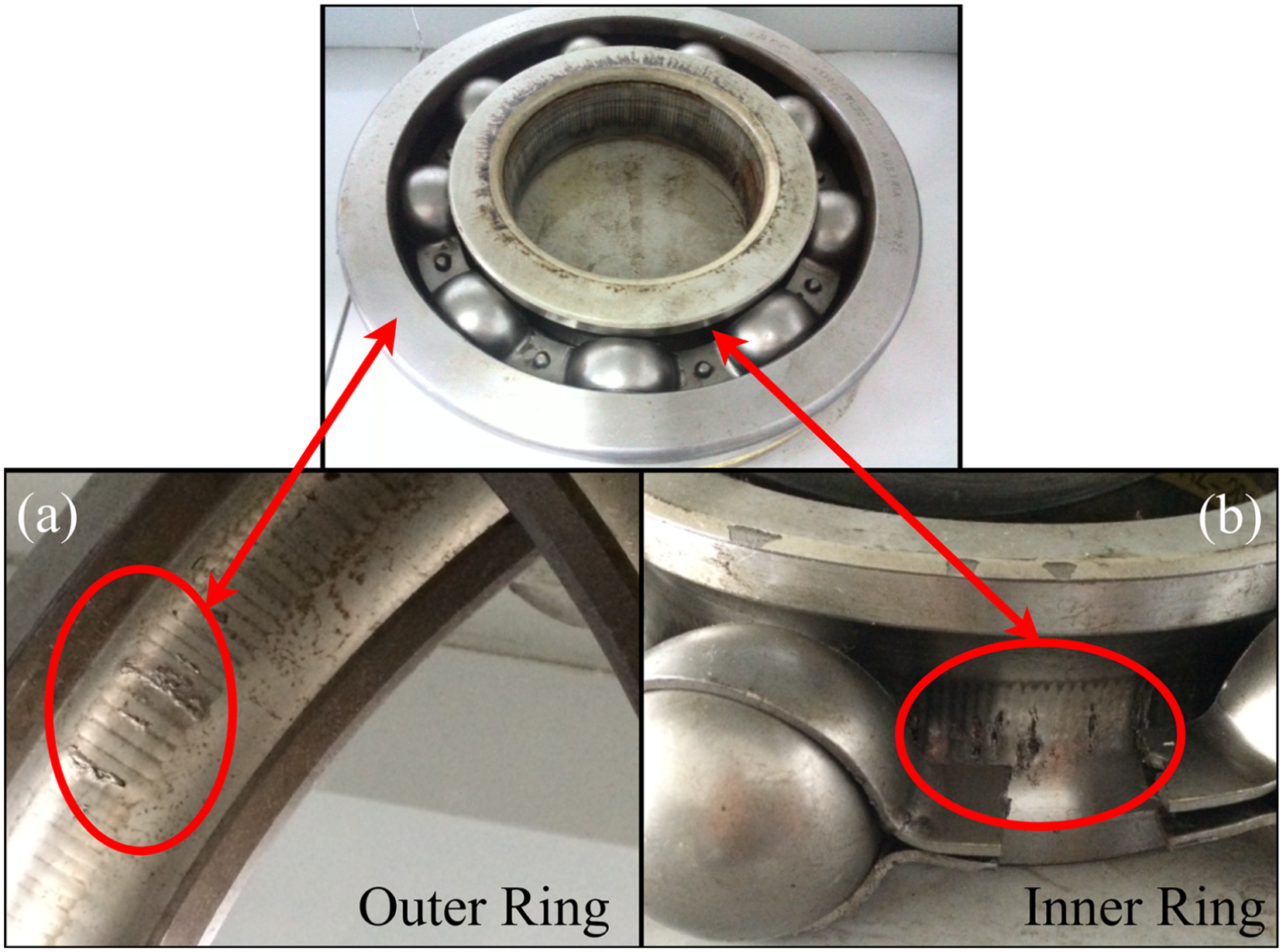
Ground truth validation based on post-mortem inspection: The top panel shows an overview of the inspected bearing, and the close-up views indicate (a) microscopic electrical erosion pitting on the outer race caused by shaft currents and (b) severe spalling on the inner race.
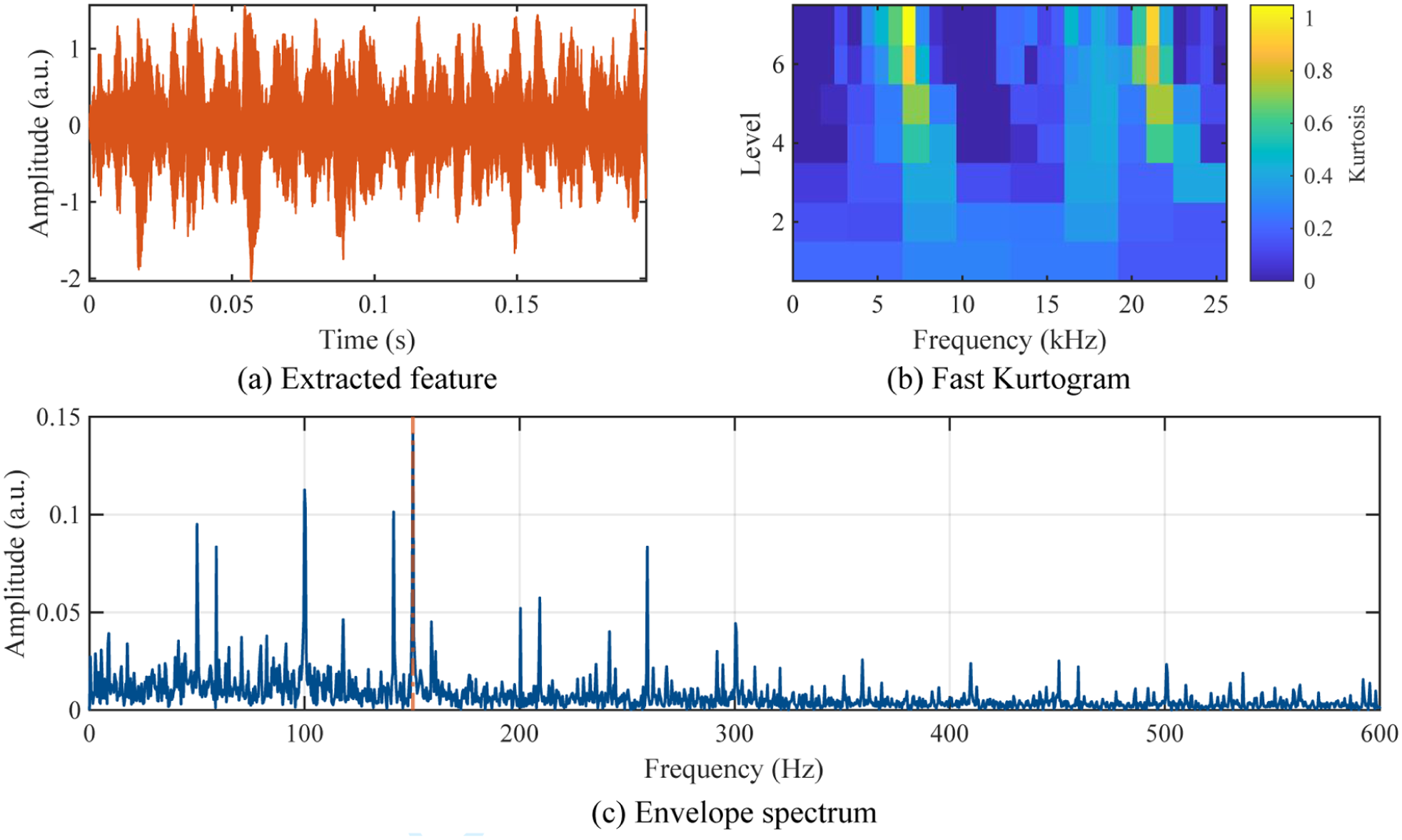
It is important to note a practical anomaly identified during the retrospective data review: during the field acquisition, the physical wiring for the generator free-end vibration sensor (Physical Channel 8) and the speed tachometer (Physical Channel 9) were inadvertently swapped at the data acquisition (DAQ) interface. Consequently, the 1X rotational speed pulse (30.77 Hz) was logged in the eighth column of the data matrix, while the high-frequency vibration signal was logged in the ninth column. In the following analysis and Table 5, the extracted fault features are mapped back to their true physical sensor channels to maintain physical consistency. The system-level diagnosis results are summarized in Table 5. For Channel 6 (corresponding to Figure 12), the proposed method successfully identified a resonance band centered at 19,600 Hz in the first decomposition layer. The extracted fault characteristic frequency at Physical Channel 6 was 44.23 Hz. Similarly, for Physical Channel 8 (corresponding to Figure 13), the resonance band was located at 21,200 Hz, extracting a dominant feature at 245.19 Hz. Based on the fundamental rotational speed of 30.77 Hz, the actual kinematic multipliers for these features are 1.44 (44.23/30.77) and 7.97 (245.19/30.77), respectively. Compared to the rigid theoretical multipliers of the QJ-series bearing (ball spin frequency (BSF) ≈ 1.482, ball pass frequency of the outer race (BPFO) ≈ 8.214), both actual multipliers exhibit a uniform proportional deviation of approximately 2.8–2.9%. This consistent shift reflects macro-kinematic slip under the elastohydrodynamic lubrication (EHL) regime. In heavy-duty wind turbine drivetrains operating under fluctuating aerodynamic loads, dynamic contact angle variations naturally induce a 2–5% slip ratio in high-speed bearings. The presence of this proportional slip confirms the physical validity of the captured field data. Other channels (Channels 1–5 and 7) did not exhibit distinct fault signatures in the target layer, confirming that the fault energy was primarily concentrated in the high-frequency bands monitored by sensors 6 and 8.
Full system-level diagnosis results across distributed sensor network.
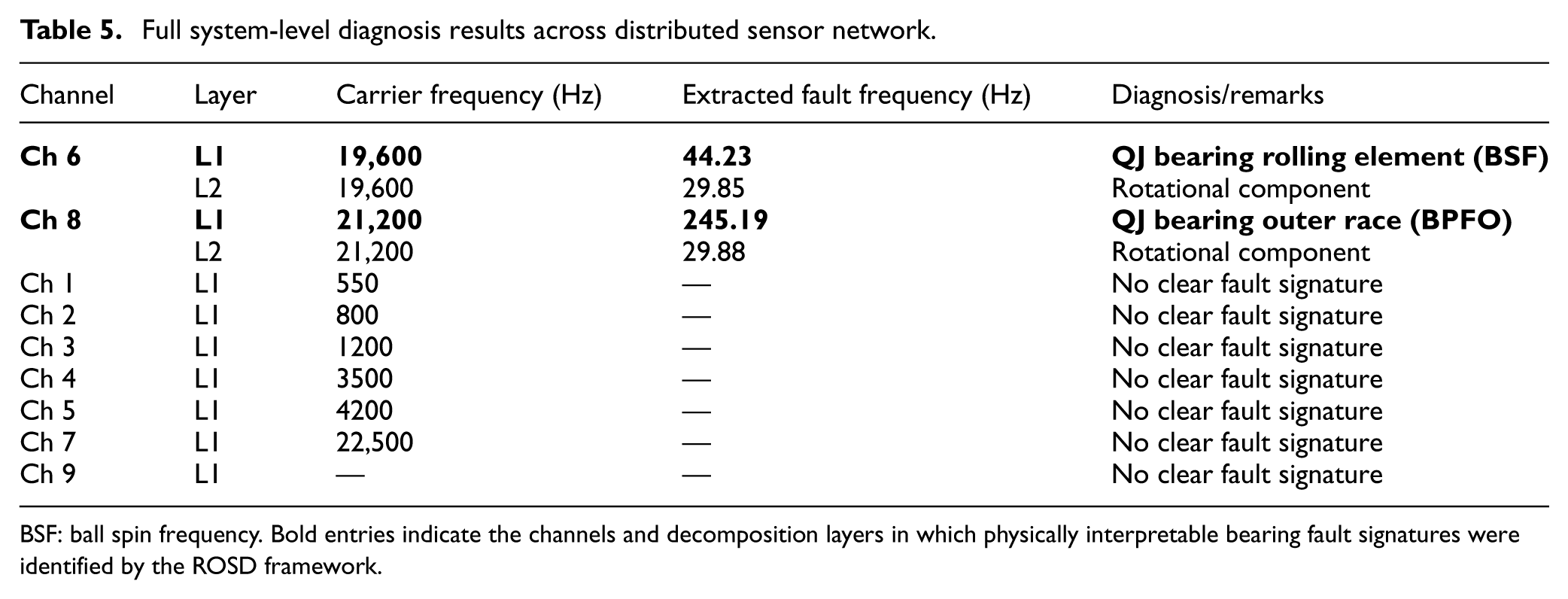
BSF: ball spin frequency. Bold entries indicate the channels and decomposition layers in which physically interpretable bearing fault signatures were identified by the ROSD framework.
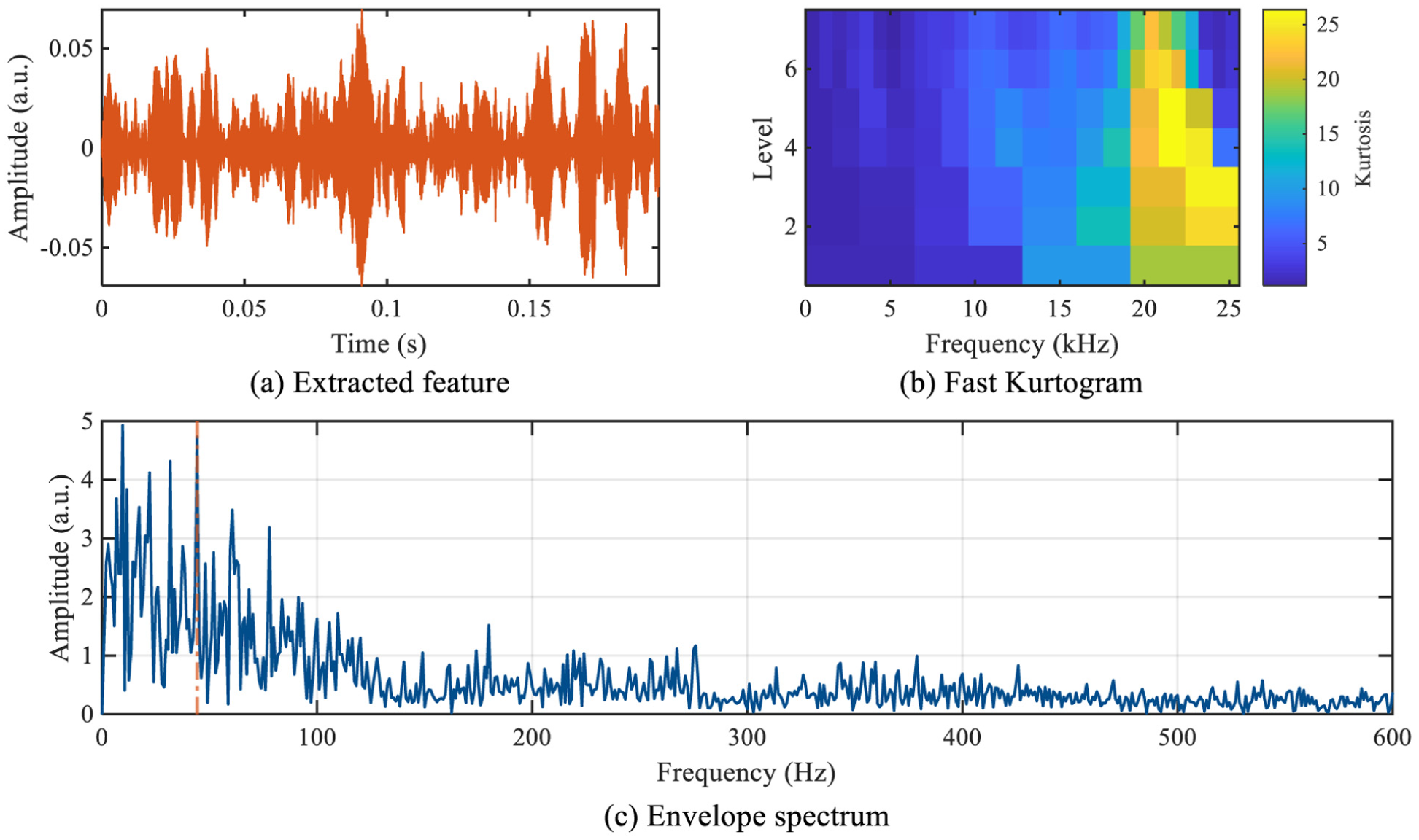
Diagnostic extraction results for Channel 6. The sensor monitors the high-speed shaft, which is mechanically coupled to the generator. The extracted fault characteristic frequency at 44.23 Hz exhibits a natural kinematic slip relative to the rigid theoretical BSF of the QJ-series bearing, successfully revealing the propagated shaft-current-induced damage under real-world operating conditions: (a) extracted feature, (b) Fast Kurtogram, and (c) envelope spectrum. BSF: ball spin frequency.
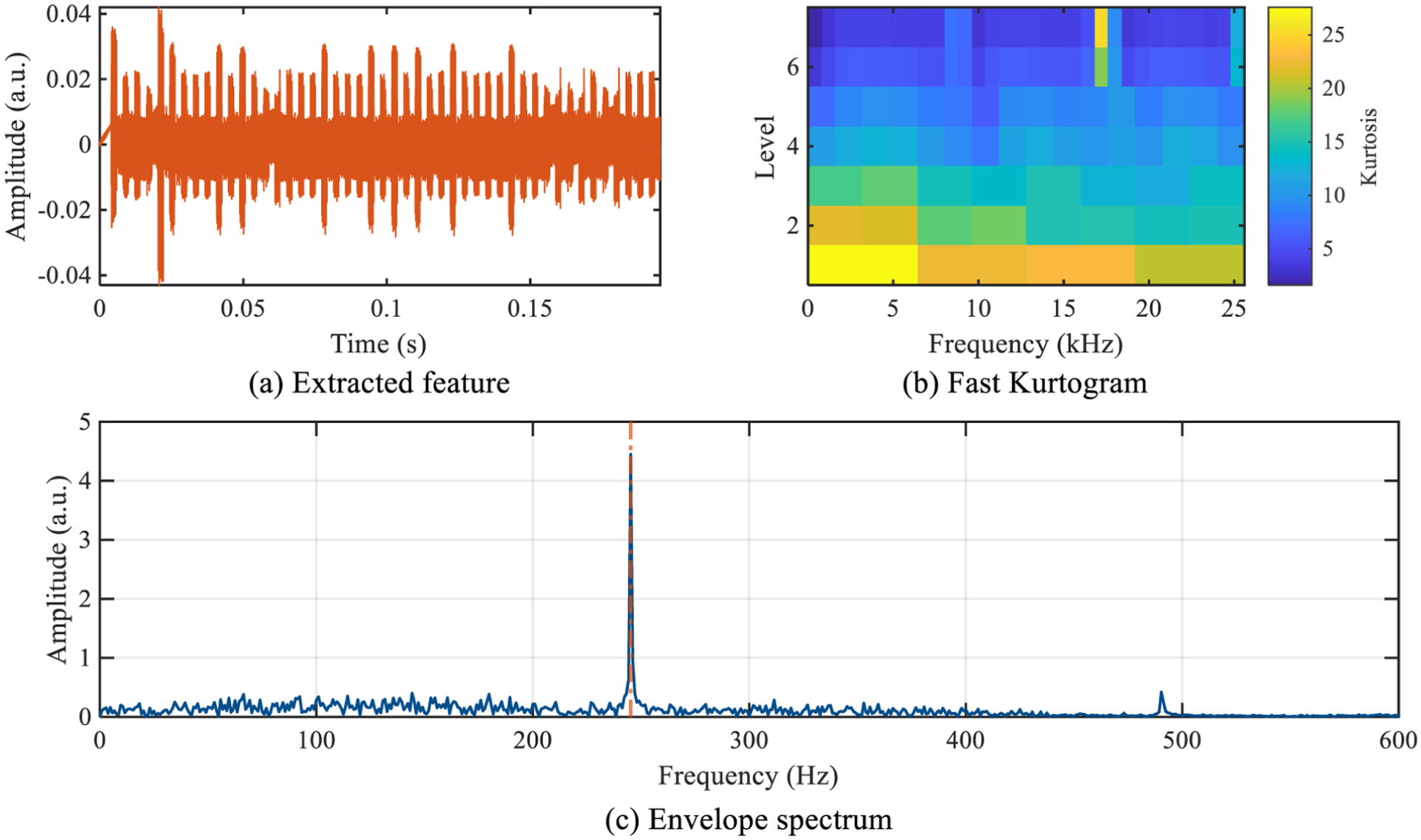
Channel 8 diagnosis (Layer 1): microscopic QJ-series bearing outer race (BPFO) (shaft current) at 245.19 Hz: (a) extracted feature, (b) Fast Kurtogram, and (c) envelope spectrum.
To explicitly verify the physical traceability of the extracted fault features across both cases, the exact operating speeds during data acquisition and the corresponding bearing geometric parameters are detailed in Table 6. These kinematic parameters mathematically govern the theoretical fault frequencies for both the NU-series and QJ-series bearings.
Kinematic parameters and theoretical fault frequencies.
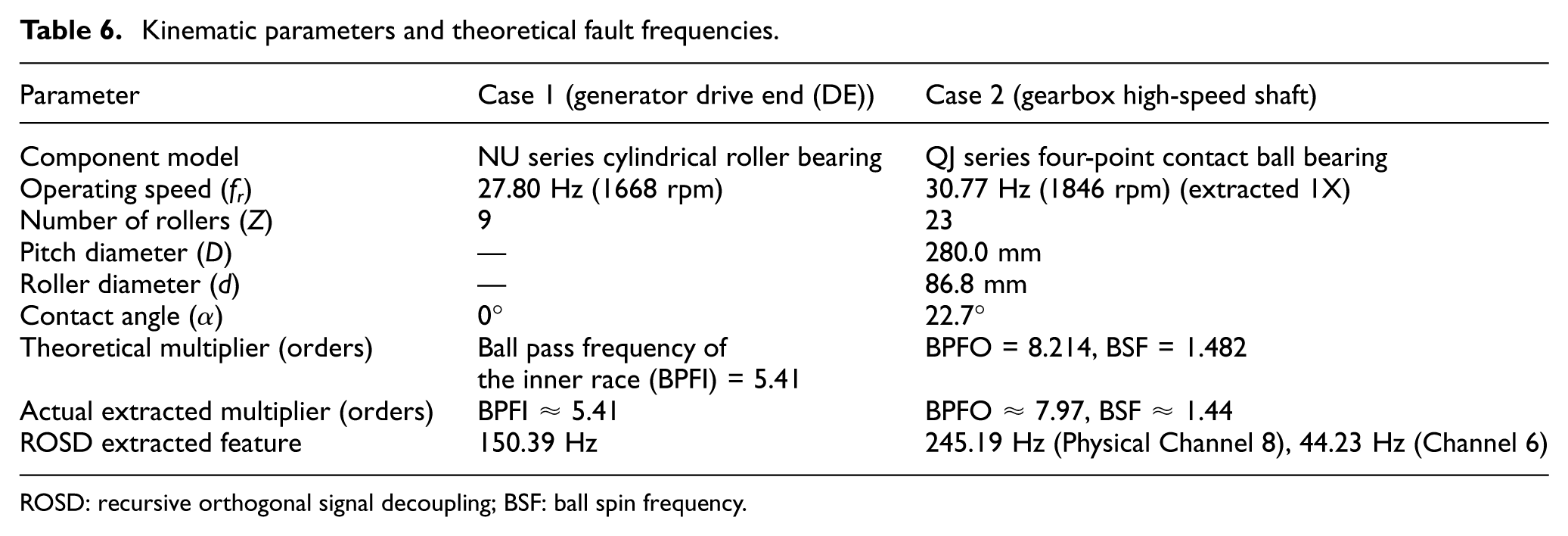
ROSD: recursive orthogonal signal decoupling; BSF: ball spin frequency.
Comparative analysis
To evaluate the performance boundaries of the proposed framework, a quantitative comparison was conducted against five established techniques: band stop and high-pass filtering representing a manual benchmark with expert prior knowledge, VMD, high frequency demodulation, Threshold Denoising, and Spectral Kurtosis. The evaluation utilized two signal categories from the experimental dataset. Scenario A based on Case 1 represents a spectral interference condition characterized by strong gear harmonic overlapping. Scenario B based on Case 2 represents a heavy noise condition where the weak electrical pitting fault is deeply masked by broadband structural noise. Correlation Kurtosis (CK) was employed as the quantitative performance metric.
It should be noted that while this section benchmarks comparative performance using specific representative experimental trials, the statistical consistency of the proposed method (including mean and standard deviation metrics) has been previously verified through the Monte Carlo simulations in “Numerical validation: Signal reconstruction” section.
Figure 14 presents the visual comparative results, while Table 7 details the numerical performance. In the interference scenario (Scenario A), the manually tuned Band Stop filter served as the theoretical performance ceiling (CK = 2.35). The proposed ROSD achieved a highly comparable result (CK = 2.31) autonomously, effectively outperforming VMD (CK = 2.16) which suffered from mode mixing and failed to separate closely spaced sidebands. In the heavy noise scenario (Scenario B), traditional methods like threshold denoising and spectral kurtosis failed to extract periodic features effectively due to the extremely low SNR. The proposed ROSD (CK = 3.12) closely matched the manual high pass benchmark (CK = 3.13), demonstrating robust noise reduction capabilities without requiring prior kinematic parameters or manual frequency band selection.
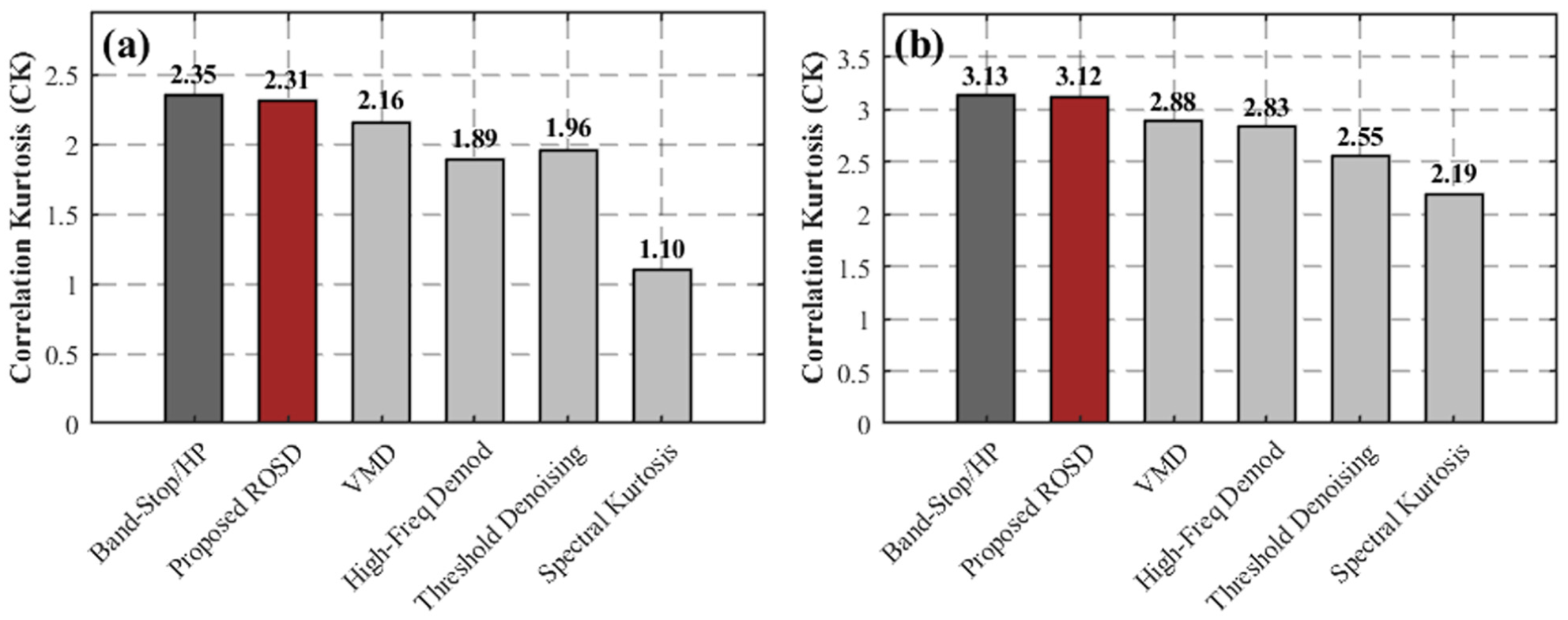
Performance comparison of six diagnostic methods across two scenarios: (a) CK under spectral overlap and (b) CK under strong noise masking. CK: Correlation Kurtosis.
Quantitative performance comparison (CK).
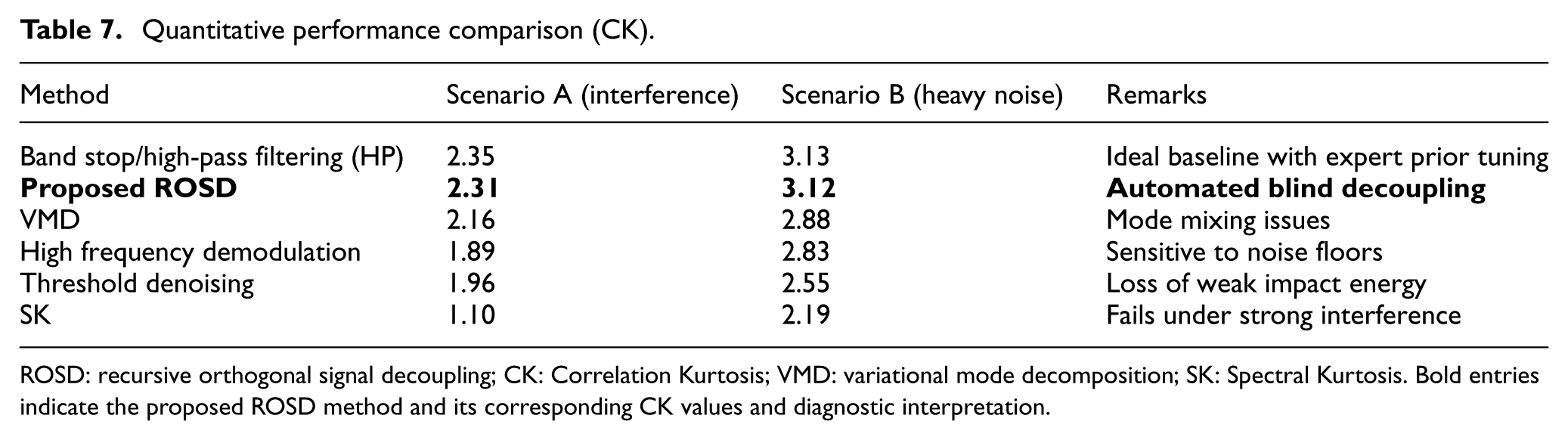
ROSD: recursive orthogonal signal decoupling; CK: Correlation Kurtosis; VMD: variational mode decomposition; SK: Spectral Kurtosis. Bold entries indicate the proposed ROSD method and its corresponding CK values and diagnostic interpretation.
Furthermore, the computational time complexity of the proposed ROSD framework is theoretically evaluated against the Fast Kurtogram (SK) and VMD to clarify its applicability. The ROSD algorithm operates sequentially layer by layer. For a discrete signal of length N, the initialization phase via the Fast Kurtogram entails
In contrast, VMD relies on the alternating direction method of multipliers (ADMM) to update K distinct modes simultaneously via global iterative optimization. This yields a theoretical complexity of
Theoretical computational complexity and decoupling capability comparison.
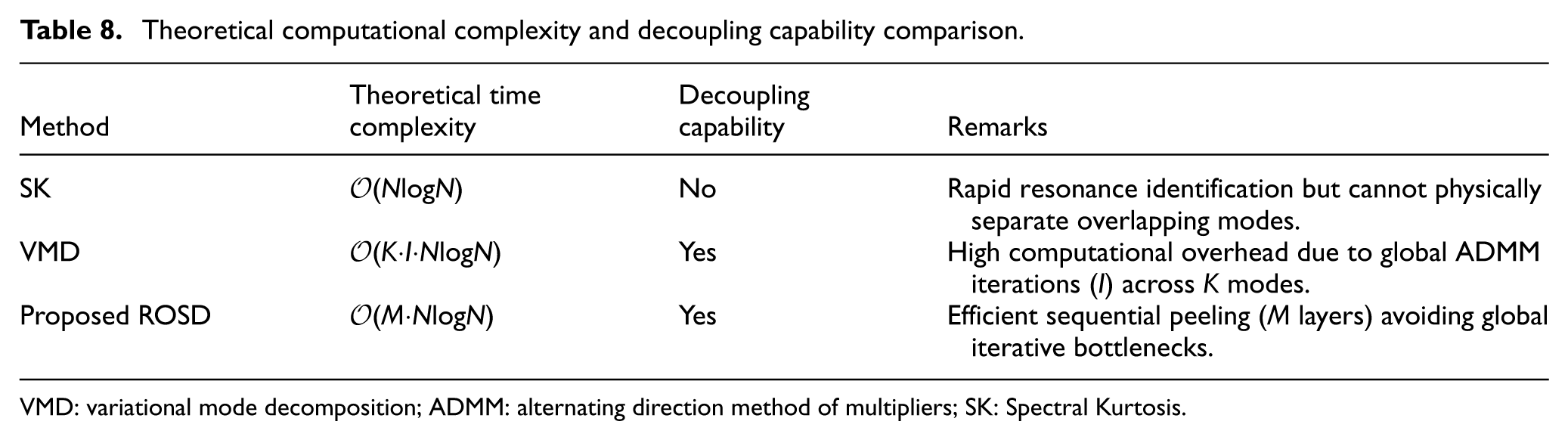
VMD: variational mode decomposition; ADMM: alternating direction method of multipliers; SK: Spectral Kurtosis.
Discussion: Monitoring implications and non-destructive characteristics
The experimental analysis provides critical insights for long-term monitoring: early-stage faults are frequently obscured by dominant operational signals, rendering conventional indicators ineffective. To overcome this, observability must be improved by resolving spectral overlap without signal suppression. The proposed recursive separation is uniquely suited for such complex drivetrain systems. Instead of yielding a single diagnostic outcome, its layer-by-layer approach systematically decouples the signal, unveiling weak fault signatures that were previously masked by dominant components.
A defining characteristic of the proposed framework is its non-destructive signal treatment. Unlike conventional band-stop filtering techniques, which are inherently destructive, orthogonal peeling removes only the component aligned with the feature mode while leaving the orthogonal signal energy intact. Consequently, spectral continuity is preserved in the residual signal, allowing subsequent fault components to emerge naturally without introducing artificial gaps or waveform distortion. This preservation of signal integrity is crucial, as it ensures consistent interpretation under varying operating conditions.
In this context, non-destructive recursive separation serves to complement, rather than replace the existing health condition monitoring approaches. By enhancing the observability of weak and overlapping fault components, the framework provides an essential additional layer of signal interpretation. This capability enables earlier and more reliable health assessment for complex drivetrain systems ultimately.
Conclusion
This study addressed the critical challenge of extracting weak fault signatures from wind turbine drivetrains, where early-stage defects are frequently obscured by dominant operational signals. It was demonstrated that conventional frequency-domain suppression techniques are inherently destructive, often compromising signal integrity and distorting phase information. To overcome this, a non-destructive diagnostic framework based on ROSD is proposed. By adopting a time-domain orthogonal peeling strategy, the proposed method systematically decouples dominant interference components while strictly preserving the spectral continuity and energy of the residual signal. This approach ensures that latent fault signatures can emerge naturally without the artificial gaps introduced by traditional filtering. By dynamically tracking the fundamental rotational speed, the algorithm maintains high tolerance to severe speed fluctuations, restricting kinematic extraction errors to 0.33% even under extreme noise masking at a SNR of −15 dB.
Validation using real-world data from a commercial wind farm substantiated the effectiveness of this framework for in-situ health assessment. The results confirmed that composite faults, including coexisting gear spalling and bearing defects, could be progressively isolated even when masked by high-energy operational modes. Furthermore, microscopic electrical pitting induced by generator shaft currents was successfully detected. The extracted diagnostic features accurately captured a natural macro-kinematic slip of approximately 2.9% relative to rigid theoretical frequencies. This phenomenon aligns directly with the EHL regime of high-speed bearings operating under fluctuating loads. These findings indicate that the proposed layer-by-layer interpretation significantly improves the observability of incipient damage, providing a physically interpretable basis for comprehensive drivetrain condition monitoring.
Future work will focus on two strategic directions: (1) optimizing the computational efficiency of the recursive architecture to facilitate deployment on edge-based monitoring units and (2) integrating full-order tracking techniques to accommodate extreme transient operations, including rapid start-ups and emergency coast-downs, as well as extending the framework to multimodal signals, such as stator current and stray flux, where the decoupling of the fundamental supply frequency can significantly enhance the detection of electromechanical sidebands.
Footnotes
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research is funded by National Natural Science Foundation of China (Grant number 52009106) and Foreign Experts Plan in China (Grant numbers H20240091 and H20240095).
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.