
Abstract
This article presents design research speculating on computationally enabled planning approaches for urban sites where informal developments make conventional masterplans ineffectual. The project advances the thesis that the spatial complexity of urban sites can be effectively studied through a network or mesh representation and that rapid change in informal settlements is not an obstacle to planned redevelopment but can be addressed through dynamic modeling and punctual interventions. In this way, the rapid turnover of the built environment can be a mechanism through which to introduce directed planning without canceling out bottom-up actions. In the case study presented, we use a multiagent approach that is able to adapt to a continuously changing context. The agents are driven by weighted random walks and compute localized analyses of the morphology of the network of public space as they move. The information generated by the multiagent simulation is aggregated to identify potential modifications to the urban fabric, with an emphasis on pedestrian connectivity.
Keywords
Introduction
Informal urbanism creates challenges for conventional masterplanning practices, which are unable to adapt to the complexity of unplanned developments or to react quickly to changes on the ground that emerge from bottom-up actions. In response to this, we look at a method for using a multiagent simulation to read localized fragments of the urban network and to propose punctual redevelopment actions that address planning goals of increased connectivity in the pedestrian network and a lack of open space. The benefits of a multiagent approach derive from the use of a dynamic model that can adapt to changes in the environment as they develop rather than projecting an entire plan from the initial state. This also allows the model to absorb external changes and to engage with informal building processes as they happen.
We will discuss the application of network analysis methods to urban morphology that is used by the individual agents as well as the implementation of the multiagent simulation as an example of a responsive planning tool.
Site context
The village-in-the-city (城中村: “chengzhongcun” also sometimes called “urban village”) phenomenon in Chinese cities—the result of rigid restrictions on migrant mobility and lack of effective urban planning restrictions in what are technically designated as rural lands—has been well documented.1–3 However, the majority of research focuses on those villages-in-the-city that are most embedded in the urban fabric. 4 The villages of Haizhu island in Guangzhou are unique in that, despite occupying a geographically central position within Guangzhou, they are still surrounded by the remnants of agricultural land: the Wanmu Orchard and Yingzhou Ecological Park. This fact sets them apart somewhat from the incursions of the megalopolis and renders them more autonomous and self-contained units, which makes them well-suited for limited studies like this one.
This project is sited in Xiaozhoucun, one of the larger villages in Haizhu. Typical of many villages-in-the-city, there is a high degree of unregulated construction (and demolition followed by reconstruction) throughout the village to replace decaying structures or to increase housing capacity. These building processes are the sociomaterial interactions that drive the urban metabolism. In similar informal settlements that lack a coordinated planning authority, punctual interventions have shown to be an appealing alternative to a comprehensive masterplan.5,6 In this project, we wished to introduce a dynamic, process-based approach to redevelopment to address the dimension of temporal change as well.
Unlike many villages-in-the-city, the population growth of Xiaozhoucun was not dominantly driven by migrant workers, but by students who attend the nearby University Town and artists associated with the Guangzhou Academy of Fine Arts drawn to the quietness and tranquility of the village.7–9 Much of the attractive urban quality of Xiaozhoucun derives from the experience of walking through the narrow, picturesque alleys and the small pockets of open space, especially along the canals. The village has attracted a small tourist crowd on the basis of these qualities; however, the appreciation of the village is limited by the confusing layout of connections and a large number of dead-ends. Because of the role that the urban fabric has in shaping the village, the project focuses on the network of public space as the village’s characteristic feature and primary object of the multiagent model.
Urban network morphology
Historically, the dominant practices of urban morphology have been concerned with identification of typological processes following Caniggia or defining morphological regions through identification of historical forms of development (i.e. with similar relationships between ground plan, built fabric, and land use) following Conzen.10–12 A trend toward more procedural definitions is apparent in recent methods that merge the analytical power of computational processing with the precision of GIS software. 13
In particular, the abstraction of urban morphology into a network representation has enabled the use of computational analysis techniques from graph and network theories to reveal facets of urban form. This can be especially useful in contexts like Xiaozhoucun where winding, haphazard paths make urban patterns difficult to identify. This project represents the urban form as a network of intersection nodes connected by links that correspond to street centerlines, a method sometimes referred to as the primal graph. 14
Constructing an adjacency matrix (indicating for each node which other nodes it connects to) for the urban network and subtracting it from the degree matrix of the nodes’ valences produces a matrix that is known as the graph Laplacian matrix. 15 A property of the graph Laplacian is that its eigenvectors can be used to divide the network into clusters based on network connectivity rather than simple proximity (so-called spectral partitioning). 16 By combining the corresponding terms of the second, third, and fourth eigenvectors into tuples for each node, it is possible to plot a 3d point for each node and to compute a simple k-means clustering on this plot. 17
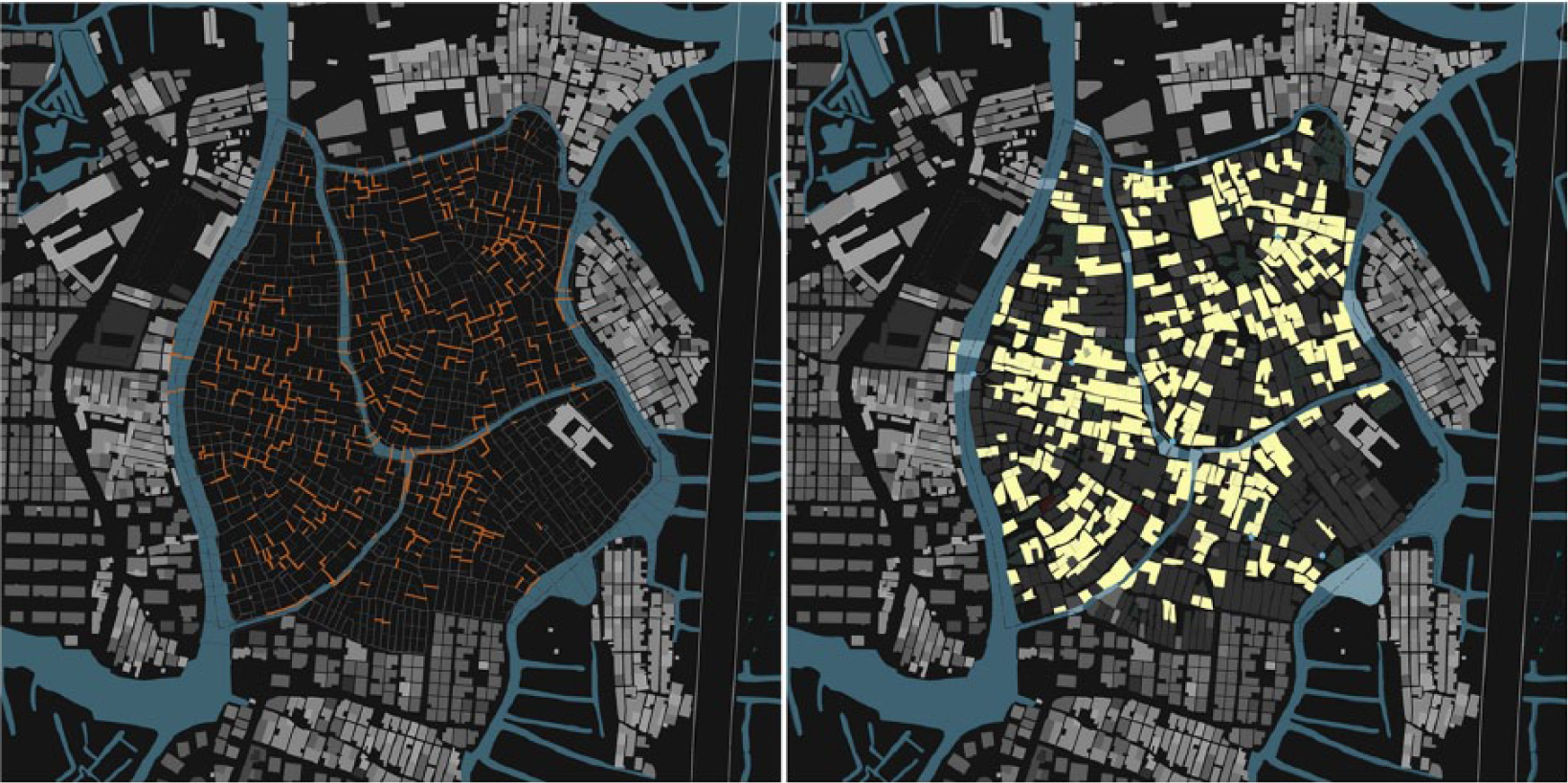
For the urban network of Xiaozhoucun, this produces a saddle-shaped plot that does not divide well into three or fewer clusters but produces good results once the number of clusters reaches four or above (Figure 1(a)). What this clustering reveals is that the large geographic features, such as canals, that appear as the obvious dividing lines between neighborhoods actually have less of an impact on cluster division than might be expected. Spectral clustering reveals that the significant divisions are often the result of disjunctions between alleyways that fail to connect to the main arteries. In contrast, these arteries are often well-connected, allowing clusters to spill over the canal boundary at bridge points where the link is retained (Figure 1(b)).
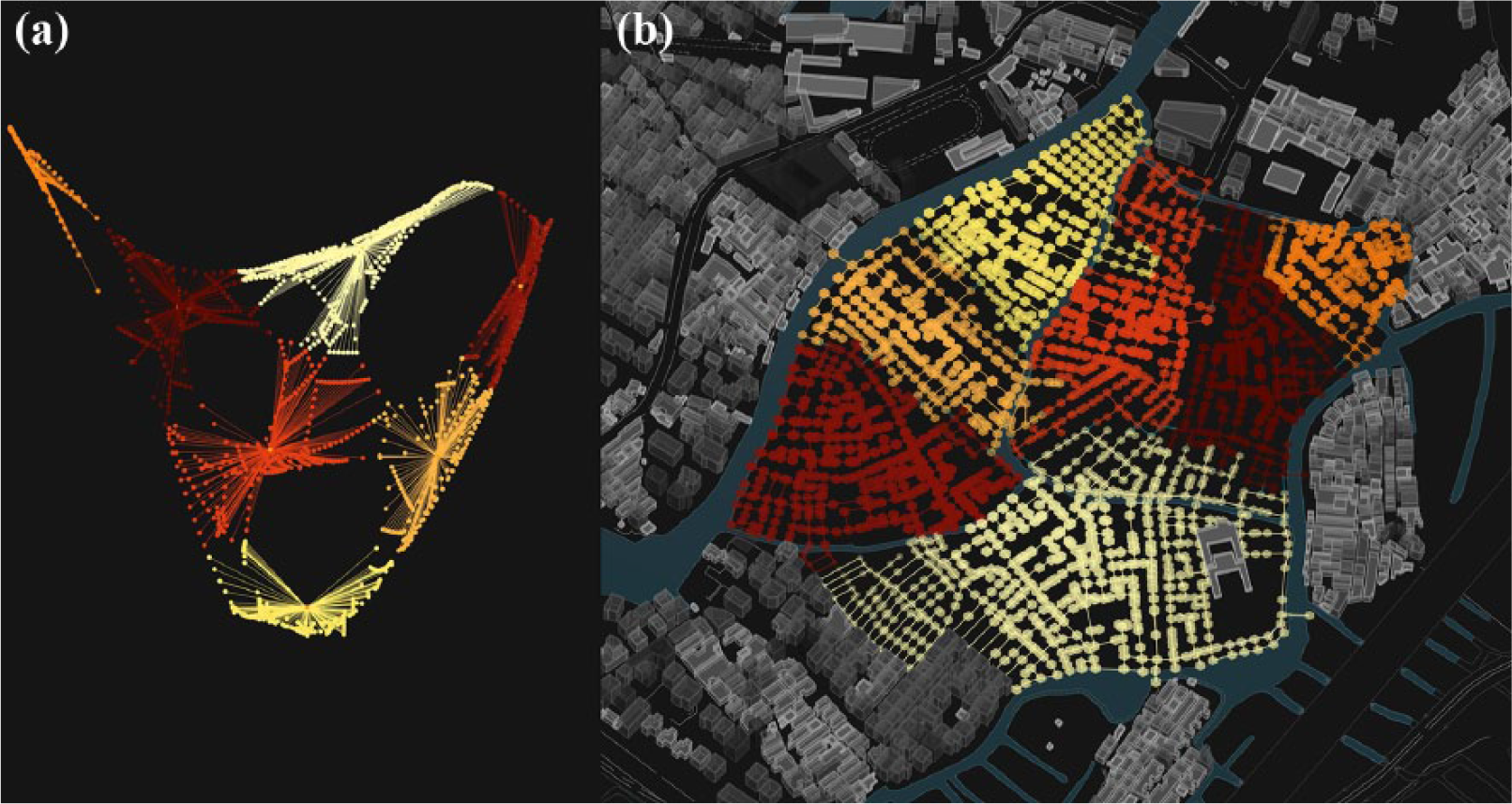
Spectral clustering of the Xiaozhoucun urban network, existing conditions: (a) At left, the plot of the eigenvector terms divided into seven clusters and (b) at right, the clustering as applied over the actual urban network. The size and intensity of each node has been scaled to represent the centrality of that node within the cluster.
The results of spectral clustering analysis show that significant divisions are the result of missing connections between paths that require meandering routes to move from place to place. This effect is measured by the geodesic distance over the network and is another moment where network analysis can be advantageous. With a computational model, it is possible to calculate the length of every possible connection and plotting the highest values for each node (the node’s eccentricity value) illustrates the distribution of connectivity across the village (eccentricity was used as a metric for comparing the final state of the model to the initial conditions in Figure 9).
One criticism of primal graphs is that nodes and links alone may not be sufficient to describe urban space. Because urban networks are realized in physical space, there are many additional layers of information to bear in mind compared to the networks composed of immaterial nodes and connections that are more typical in network analysis. In an urban network, the network links will also have a specific length, and this length should be accounted for to prevent accidents of the network formation from distorting the performance of the network. Furthermore, a single section of the street may have many different qualities along its length and an analysis that only uses street segments would produce an insufficient degree of resolution and a resolution that may vary unevenly depending on the network morphology.
Sevtsuk and Mekonnen address this concern by introducing building entrances into the network as terminal points that branch off from the street segments, enabling the use of building data such as floor height, property value, use, or occupant load to add weighted values to the urban analysis. 18 This works quite well in contexts dominated by stand-alone buildings. However, in Xiaozhoucun, the built environment is a near-continuous fabric of buildings, prompting a different response. In this project, we have introduced supplementary nodes at locations where street width changes significantly to subdivide links into segments that encapsulate different qualities. We have also included in the network segments that define plot divisions and party walls between adjoining buildings. As described in section “Network definition and analysis,” this allows the data of individual buildings—for example, building height—to inform the network model as well.
Finally, it is also true that path selection in urban networks will be influenced by properties other than routing efficiency—for example, a path’s width, orientation, or adjacent programming. Urban network studies thus require additional strategies not required by network theory to more address the multiplicity of choice in urban spaces. The UNA toolbox includes processes for a weighting by density of program or amenities and for generating redundant paths that are not the shortest but fall within an acceptable range of the shortest path. 18 In this project, similar variation in the potential network paths is inherently generated by the movement of the agents and the recentering of the point of analysis. When numerous paths are aggregated, the initial appearance of Xiozhoucun’s urban network as a non-hierarchical tangle of paths is revealed to contain a series of connections that do act as circulation trunks where many paths converge.
Multiagent swarms
In order to address the informal context of the village without imposing a deterministic plan, the project uses a swarm of agents to conduct localized, rather than total, actions. These agents both read the urban network morphology analytically and encapsulate behaviors for exploration and redevelopment that capture the intelligence of the village metabolism. 19 Swarm intelligence is often seen as a useful way to replicate or work within informal urban settlements because it reproduces an environment where behavioral logics engage and adapt to one another in the absence of a central control or guiding masterplan. 20 Furthermore, an agent-based system is well-suited to dynamic modeling and the responsiveness it requires. 21 Within network analysis, multiagent systems have also been shown to be effective tools for identifying network features such as clustering patterns.22,23
In the dynamic model, each agent is instantiated at a node in the network and allowed to move freely over the network from node to node along links. Within this network, the agent walks have two purposes: the first is to stochastically record bottlenecks and clusters in the circulation network by recording the aggregate traffic volume over time (values that are stored as properties of the network link). The second is to indicate potential for minor additions to the circulation network, “shortcuts” that would open up significant new connections.
Methods
In this section, we discuss the application of the multiagent simulation as a dynamic model that incorporates the techniques discussed and uses them to propose a framework for redevelopment. The primary mechanism of intervention piggybacks on the existing informal redevelopment patterns wherein older buildings (often masonry structures) are demolished, building material like brick is salvaged, and new buildings are rebuilt in the same location taller to produce more rentable units for the landlord. This model seeks to identify locations where rebuilding activity might also offer opportunities to create new circulation connections.
Network definition and analysis
Within the model, the existing village was redrawn as a network from a standard cadastral plan. This network is formatted as a customized half-edge mesh datastructure such that mesh edges represent segments of circulatory space or party walls between adjacent buildings. 24 Unlike many urban network analyses, the model also engages with the mesh faces, which represent individual plots (built or open). In this way, we are employing a half-edge datastructure not merely as a technical expediency but a direct analogue of the representational schema. Mesh faces and edges are defined as object classes with a number of properties for metadata storage such as built height or clear width. In this example, even the relatively compact village of Xiaozhoucun is composed of over 850 faces and 3800 edge segments. Therefore, in addition to individual input, the model also includes methods for automatically importing and assigning the metadata values from a standard figure–ground image file, making initial conditions easy to modify. Figure 2 shows this base image file and the resultant mesh rendered with either edges or faces visualized.

Figure–ground map of the site from cadastral plan (including building heights: taller buildings have darker hues). Edge representation within simulation model, face representation within simulation model (including building heights: open parcels are shaded black).
Agent definition
The half-edge mesh provides the ground for the agent swarm. Agents occupy nodes and are able to move along any incident half-edge with a non-zero width. The direction of travel is selected randomly from a list of the available directions and can be weighted according to the path widths or to seek a destination (direct backtracking is precluded except in the case of a dead-end). The random walks were tested with three parameters for direction selection (Figure 3, columns): an unweighted list in which each possible direction was counted once; a linear weighting in which possible directions were counted according to their width in meters, wider paths thus having a greater chance of being selected; and an exponential weighting in which possible directions were counted according to one half of the square of their widths, wider paths having a much greater chance of being selected. The exponential weighting resulted in many sections of the network being ignored while the unweighted option had the most even coverage. In the scenario that follows, the weighting toward larger thoroughfares resulting from a linear weighting was selected in order to generate traffic patterns that were more reflective of real-world pedestrian patterns.
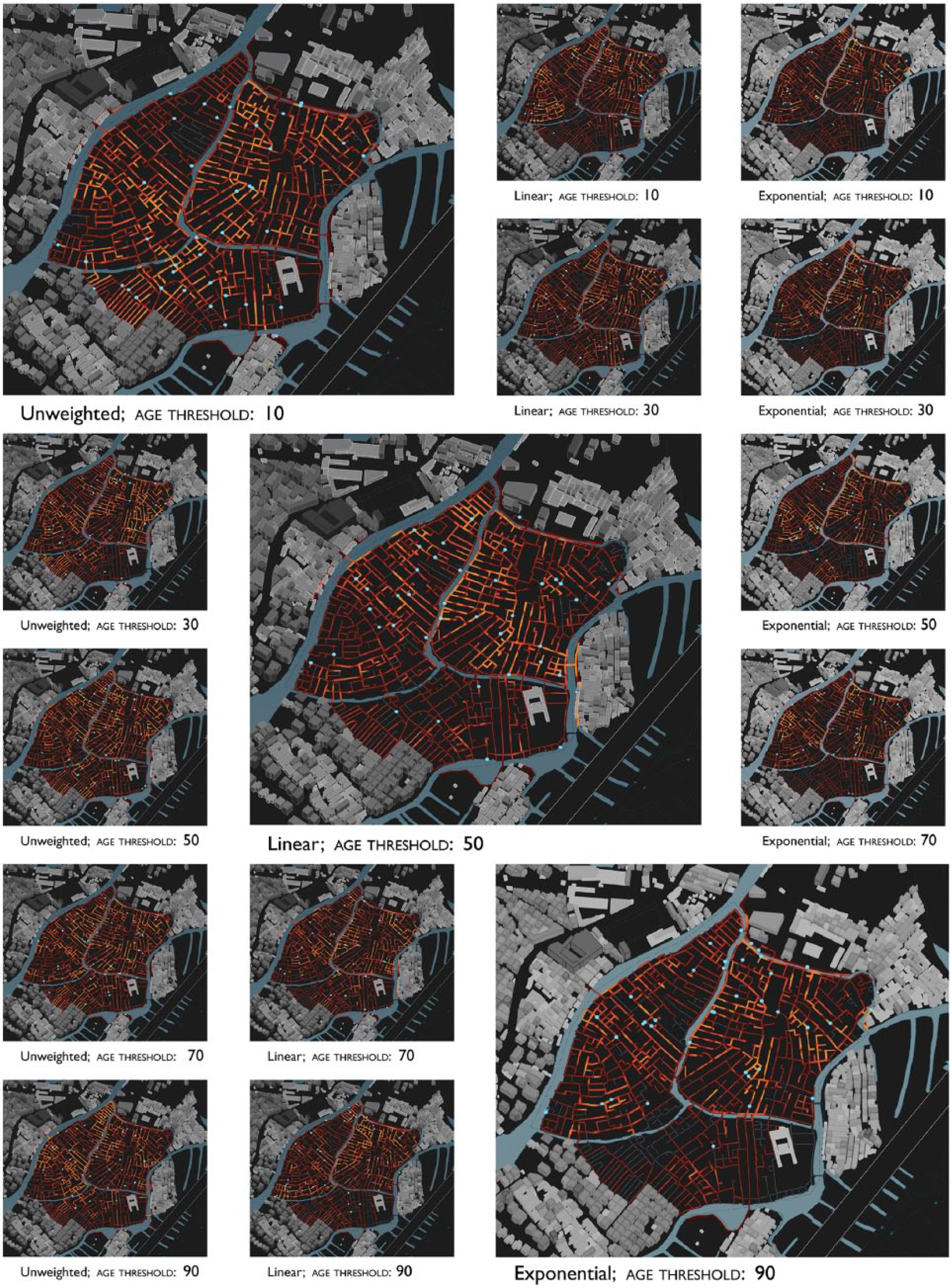
Accumulated traffic patterns of multiagent random walks after 500 frames with different parameter sets. The selected option is in the center.
During development, it was observed that agents occasionally became stuck in repetitive loops or dead-ends, unbalancing the traffic patterns (Figure 3). This was addressed by giving the agents a limited lifespan: after a certain number of steps, the agent would be removed from the simulation and a new agent spawned at a randomly selected location. Testing with different age parameters (Figure 3, rows) showed that a high threshold of 90 steps did not do much to combat the problem of repetitive movements, while a low threshold of 10 steps often prevented the random walks from spreading far enough from their initial locations. A threshold of 50 steps was chosen for use in the model.
Local network analysis
Comprehensive analyses of the entire network (even simply measuring the diameter of the graph) grow exponentially as the network expands. At the scale of this village, that can become very time-consuming and quickly becomes impractical in an agent-based model where calculations are further multiplied by the number of agents. In addition, the structure of the urban network itself suggests that a localized scope of analysis is frequently more revealing than a global scope. Figure 4 illustrates the results of an analysis restricted to 125 m—the radius of each node is determined by its reach, that is, the length of the network that can be reached within a 125-m walk, and the color is given by a ratio between the depth (or geodesic distance) and the Euclidean distance measured directly to each point within its 125-m network. The map shows how in-between certain well-connected paths, there are pockets of space (marked by small, dark nodes) with poor connections resulting from cul-de-sacs, dead-ends, and disconnections. These characteristics fade from the picture when the limiting radius is increased and any distinction in reach is eliminated when the radius exceeds 800 m.

Map of the depth–distance ratio where darker nodes indicate a higher ratio (a more circuitous network) and brighter colors indicate a lower ratio (more direct, straight-line connections).
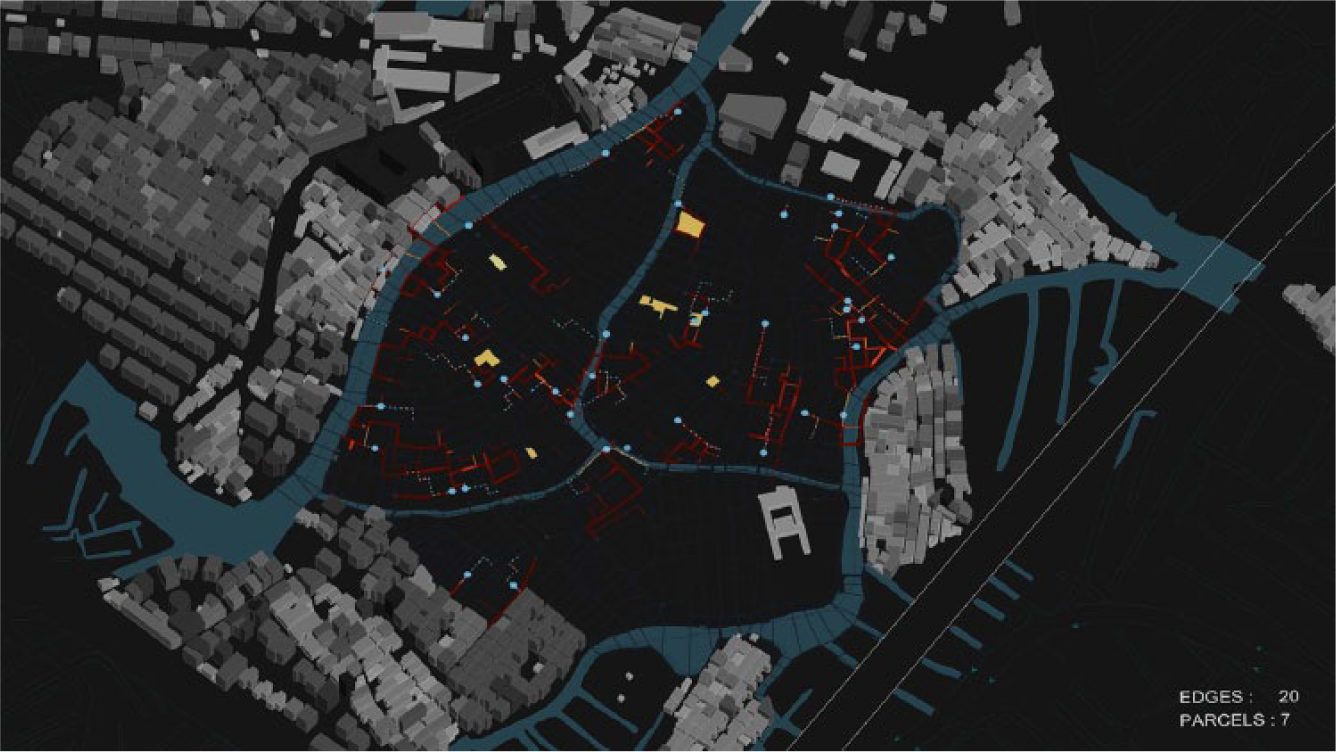
In order to assess the potential of a location for alteration, each agent is programmed to calculate the local graph of all navigable edges that could be reached from its current location within a limiting depth, in this case, 75 m (this limit value was selected after early tests indicated that the selected edge always fell within this range). The travel distances required are compared to the distances for the same points that would be possible if all edges of the mesh were used, including those that are currently not traversable. The point from the first graph that had the greatest reduction of distance is selected and the shortest path to it highlighted. Any segments along that path that are not traversable are identified as potential shortcuts and an aggregate value counting the number of times an edge is designated as a potential shortcut is saved as a property of that edge (Figure 5).

A depth map from an agent location over the circulation network, localized to 75 m; the same depth map including also non-traversable edges as potential connections with the most impactful shortcut highlighted in blue.
Assessment and redevelopment
As the simulation runs, the mesh faces (representing distinct building plots) periodically assess the total traffic and shortcut values over all their perimeter edges. The sum is compared to the plot’s internal values, particularly its persistence (this value is assigned at the beginning of the model and declines as the building ages); they are considered for replacement. From the potential candidates identified in this interval, one face is selected: if that face has an existing building on it, it is demolished and rebuilt at a higher density. The moment between deconstruction and reconstruction is highlighted as a moment when it may be possible to also create new paths in the circulation network. At any edges that had recorded excessive traffic volumes, the offset width of the path is increased to create new traversable alleyways. The setbacks at the ground floor are compensated by projecting reconstruction at a higher density than the pre-existing building. The new density is calculated following the village’s existing pattern of recycling bricks from masonry structures (pending more in-depth site surveying, we assume that existing structures are masonry cavity wall construction typical of older, low-rise buildings in the village) as infill walls in multi-story concrete frame structures. More wall area can be constructed by the same quantity of brick in an infill configuration. The maximum height of the new construction is thus defined by the amount of material freed up by the demolition.
After a plot has been selected for reconstruction, the agent swarm and edge values reset and new agents are spawned from various public spaces in the village. Subsequently, all agent walks and analyses incorporate the new width values in their operation. Figures 6 and 7 show screenshots of the model in operation. The process of selection and the projections for reconstruction are deliberately modeled as negotiations of possible outcomes rather than through deterministic planning dictates. It is hypothesized that the model is most effective when it does not interrupt the bottom-up development of the village, but when it engages with the ongoing development to incentivize certain actions, such as coupling public amenities in a reconstruction.
The path of the agents’ random walk is recorded as a traffic value by the edges. Currently calculated shortcuts are shown by the dashed line. The combination of these values is visualized as the color of the edges.
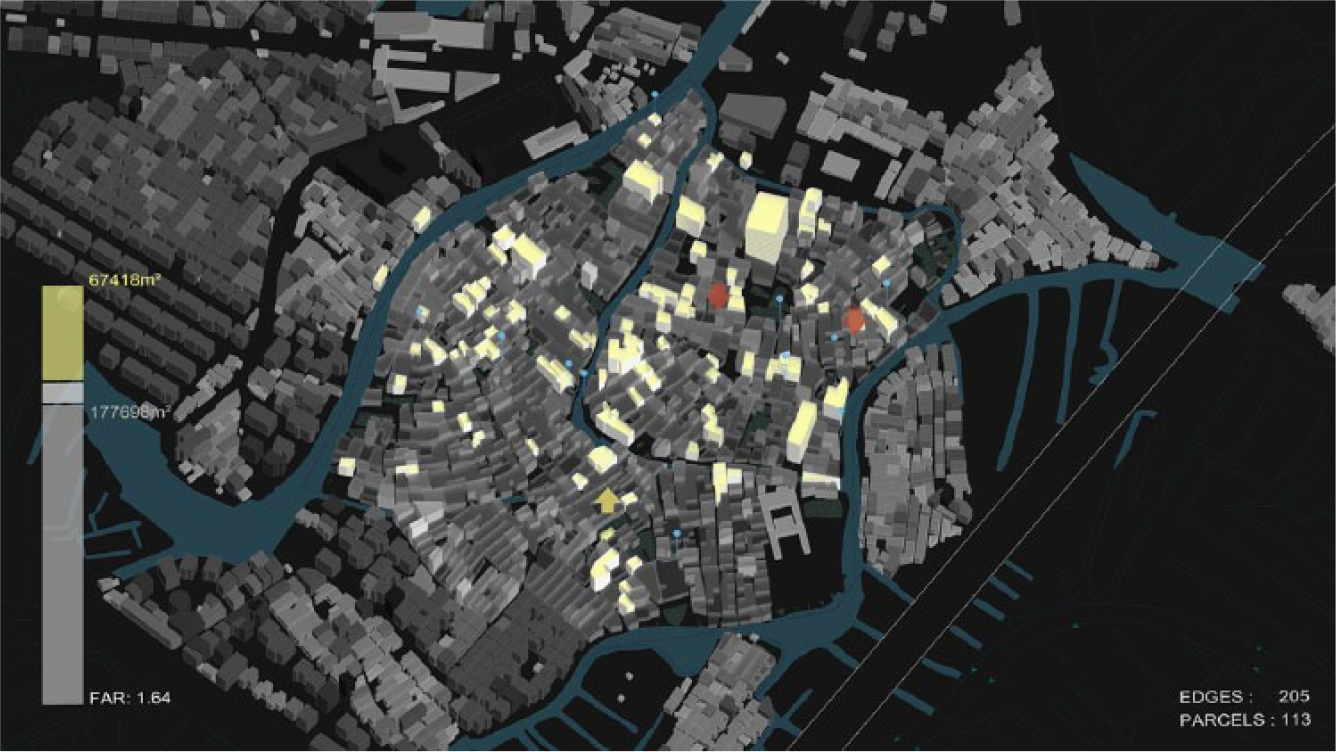
A volumetric visualization of the simulation with a live tally of total built floor area. Yellow volumes are new constructions. In-process demolition (red arrows) and reconstruction (yellow arrow) can be seen in this frame.
Results
Test case
After running the simulation for 5000 cycles, the model had widened or opened 653 edges and reconfigured 379 parcels (32.3% by count or 29.5% by area)—62 of them as new open plazas (Figure 8). From the built floor area, 70,000 m² of the original 190,000 m² were replaced and extended with the result of nearly doubling the floor area ratio from 1.27 to 2.48, reaching a total built area of 370,000 m². Interestingly, the sites of redevelopment are distributed widely across the site as truly punctual interventions and not primarily within common zones. Interventions increased in frequency as the simulation progressed due to the advanced aging (decreased persistence value) of the original building stock.
The edges and faces modified after the simulation has run for 5000 frames.
With regard to the original stated goal of addressing inefficiencies in the circulation network, the eccentricity of the network was calculated before and after the simulation was run: from each node in the half-edge mesh, the geodesic distance to every edge was calculated and the highest value stored. The median eccentricity of the initial circulation network was 565.45 m and the diameter (the single longest direct distance between two points) of the network was 775.73 m. These values decreased to 508.65 and 702.13 m, respectively (Figure 9). This change was effected by opening up around 4.14 km of new alleyways, a sizable number in comparison to the pre-existing network length of 16.7 km, but quite small when one realizes the average addition was only 6.93 m. An additional 417 m of existing pathways were widened slightly.
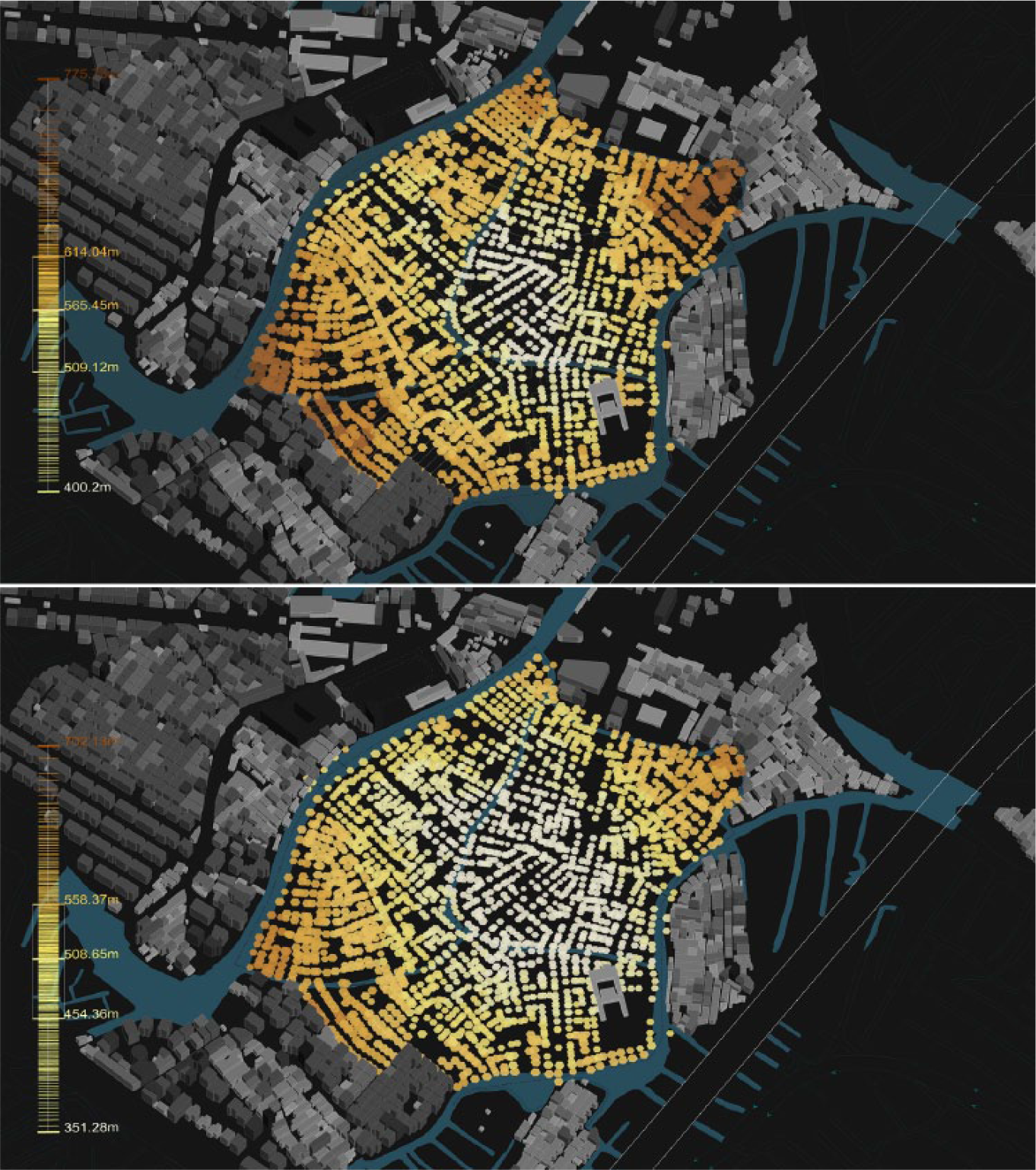
Comparison of eccentricity values before and after the simulation has run.
Conclusions and further work
The model developed in this research demonstrates the capacity to guide development in an informal context without resorting to a totalizing plan—even with only a few parameters. Despite the lack of centralized coordination, the selection of parcels is consistent and overall urban composition remains coherent and functioning throughout the process. In this way, a time-based, rather than plan-based framework like this one could also be compelling in more formal urban planning scenarios because it allows the masterplan to adapt in parallel with development, and to internalize early or intermediate results rather than relying on phased development stages. The decrease in the median eccentricity and diameter values, with only minute and incremental changes, shows how the effectiveness of strategically positioned modifications can offset relinquishing control of other aspects of the masterplan. While it might be possible to optimize the impact of interventions by working back through the alterations and removing redundant changes, we feel that would be in contradiction to the primary goal of a planning tool that is meant to be reactive and resilient to external changes and would reintroduce a totalizing character to the plan. An optimized solution is reliant on both the coordination of all the component interventions and the absence of any interfering actions. This model, in contrast, does not require every intervention to be realized, nor does it prohibit other modifications that might occur informally.
This work was approached as a design research project and its realization illuminated many issues that had to be resolved in initial ways, but which must continue to be studied in more focused detail. In particular, it would be useful to improve the spectral clustering logics. The spatial qualities of the circulation network could be better incorporated by refining the process of affinity weighting in the dataset. At the same time, it would be useful to derive metrics that allow the implicit clustering performed through the multiagent random walks to be compared directly to the clustering results produced through spectral analysis. This benchmarking would be aided by developing a more standardized method for comparing agents with different behavior parameters to one another.
Following this, it would also be beneficial to bring the specificity of architectural configurations to the logic of redevelopment. Especially as higher-rise structures are proposed, the attendant needs of vertical circulation and access become significant to the success of the proposal. Given these needs, it would be natural to allow adjacent, small parcels to partner with one another, sharing a staircase or elevator core, enabling true high-rise construction to also be considered. This would require more communication between a mesh face and its neighboring faces, but once implemented could be used for a number of purposes, such as air rights negotiation and ensuring privacy from vis-à-vis relationships. Finally, better controls for the flow of time in the model, especially pausing and restarting the simulation would improve the performance and memory loads and allow more interactive adjustments to changing onsite conditions. At the moment, the enaction of the model happens largely within a closed system, but the true potential of the model is as a process that can facilitate a participatory discussion between planners and property owners and become a truly open system.
Footnotes
Acknowledgements
This research was begun as part of a PhD completed at the M×D Lab at EPFL advised by Professor Jeffrey Huang. Cadastral data were supplied through a partnership with Professor Kongjian Yu at PKU.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The research is continued with support from SUTD’s Startup Research Grant.