
Abstract
After Viking proved that long-term, meaningful scientific data could be sent reliably from the martian surface, the field fundamentally shifted. Its success reshaped how scientists and engineers formulated their research and planned future missions. In a similar way, the Ingenuity Mars Helicopter’s demonstration of flight changes the paradigm, enabling new ways to do science on Mars and other planetary bodies. Rotorcraft enable increased range and coverage, access to hazardous terrain, and access to the atmospheric boundary layer. These capabilities expand the scientific reach of future missions. In astrobiology, aerial explorers could revolutionize the study of subsurface cavities and potential refuges for life, the detection of trace gases, high-resolution geological mapping, sampling or sample retrieval, and planetary protection. The technology driving improvements in both standalone rotorcraft and coordinated fleets of aerial vehicles is progressing quickly. As these systems mature, they are poised to become essential tools in planetary exploration.
Introduction
Viking’s descent to the martian surface ultimately paved the way for the Ingenuity Mars Helicopter’s ascent from the martian surface. The Viking landers proved that long-duration surface missions were not only possible but sustainable, overturning early skepticism within the community. Ingenuity, part of the Mars 2020 mission, would later challenge long-held doubts about the feasibility of powered flight on Mars. There are other parallels between the two missions. Viking was the first mission to combine a flight vehicle and ground asset by using both a lander and orbiter. Mars 2020 extended this to a helicopter and a rover. The Viking landers transformed imaging on the martian surface by returning the first colored panoramas taken from the surface. The evolutionary path from these stationary landers to aerial flyers was bridged by wheeled rovers, beginning with the Mars Pathfinder mission. Pathfinder included a lander with the deployable Sojourner rover as a technology demonstrator, similar to how Ingenuity was a technology demonstrator alongside the Perseverance rover. Sojourner showed that small, mobile vehicles could add science value by analyzing soil and rock samples and transmitting close-up images of the martian surface. Ingenuity built on this legacy by demonstrating the value of imagery through aerial reconnaissance: surveying broad regions, inspecting/imaging areas of interest at close range, and directly informing the Perseverance rover’s traverse planning. Durability further links the two missions. Viking was designed for roughly 90 days yet operated for more than 6 years, setting a high bar for resilience. Ingenuity similarly exceeded expectations, achieving remarkable longevity despite relying on commercial off-the-shelf (COTS) components. In doing so, it challenged long-standing assumptions about what “low-cost” Mars missions can achieve. Taken together, these similarities between the Viking mission and the Ingenuity component of Mars 2020 provide important context for understanding Ingenuity’s performance and its contributions to the exploration of Mars.
Ingenuity is currently the only vehicle to have achieved powered lift on another planet. Ingenuity was a small, coaxial helicopter that launched on July 30, 2020. It landed on the martian surface in Jezero crater on February 18, 2021, as a payload on the Perseverance rover. The helicopter was designed as a technology demonstrator, and as such, Ingenuity’s full success criteria were five flights. However, it ultimately completed 72 successful flights over 3 years. It flew for 128.8 min, covered 17.0 km, and reached altitudes of 24.0 m. Although not originally planned, these additional flights contributed to an “operational” phase where it supported Perseverance’s mission objectives by providing aerial surveying and scouting ahead to assist with path planning for the rover, significantly improving route efficiency (Tzanetos et al., 2022).
Why Atmospheric Flight?
Ingenuity’s successful demonstration of powered flight on Mars was a milestone in planetary robotic exploration. Its significance, however, reaches beyond the technical milestone itself. Ingenuity’s achievements have opened the door for future mission architectures to incorporate aerial mobility on the martian surface. Key transformative advantages for increasing science return include greater speed and range, ability to image science targets up close or at a distance, and enhanced navigation over difficult, previously unscalable terrain. The importance of atmospheric flight is perhaps best understood when viewed alongside the orbiters, rovers, and landers that have traditionally shaped planetary exploration.
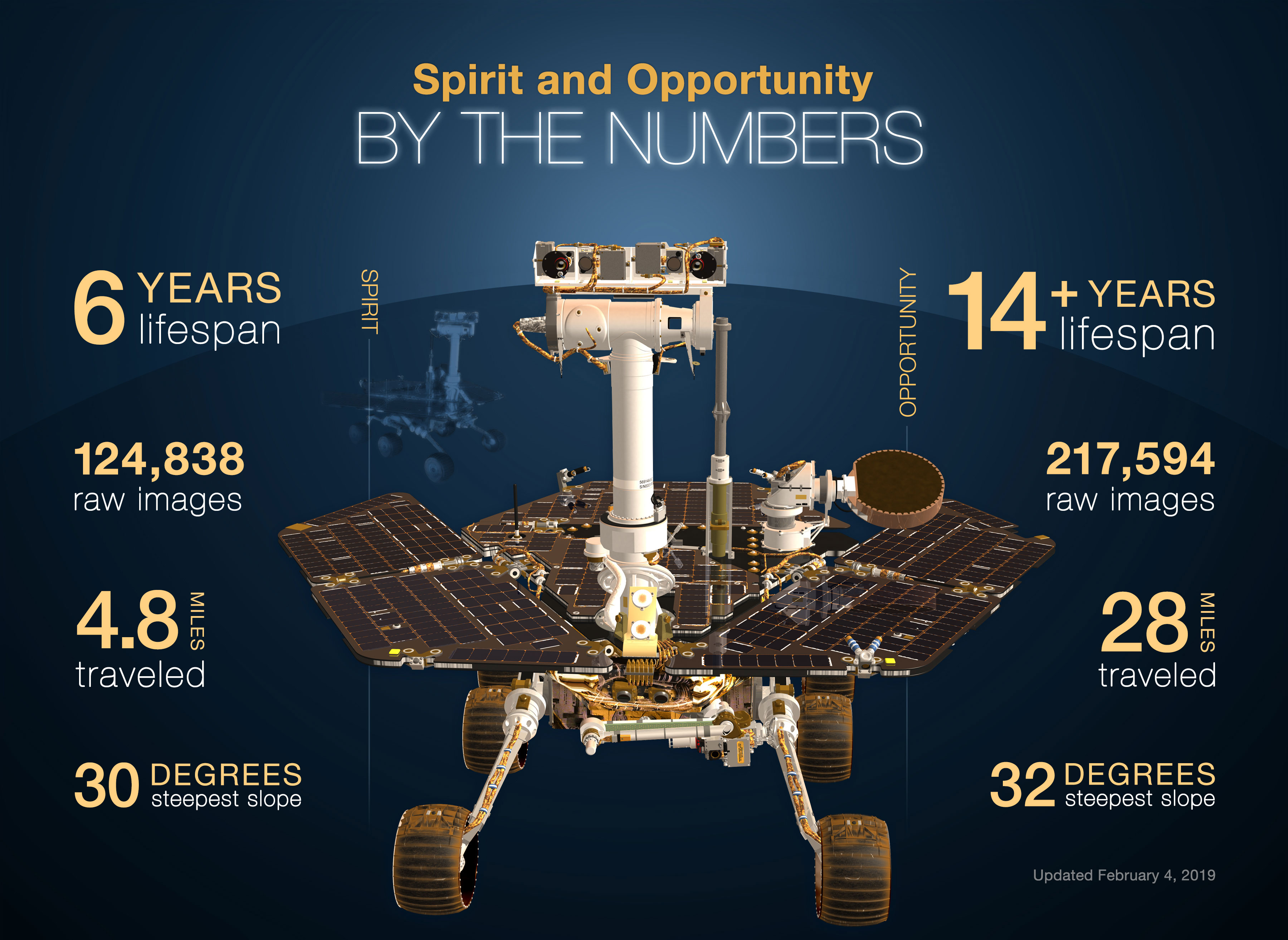
Orbiters generally operate at larger scales and greater distances (greater than hundreds of kilometers) from the martian surface than aerial platforms; science return is ultimately limited to spatial and temporal resolution of the instrumentation. As a result, they cannot interact directly with the surface or much of the atmospheric boundary layer. In contrast, aerial vehicles enable highly resolved panoramic and close-up surveys of the martian landscape, as demonstrated by Ingenuity, which makes them an unmatched platform for imaging, reconnaissance, and characterization of the atmospheric boundary layer. Rovers offer ground mobility compared with stationary landers, but their speed and range are limited, which restricts rapid or extensive survey objectives. The Opportunity rover holds the record for longest distance covered at 45 km over its 14+ year lifetime (NASA, 2019a, 2019b, 2019c). While important, this is a relatively small segment considering the enormity of the area of the surface still yet to be explored (the total surface area of Mars is 144 million km2).
Selecting the First Powered Flight Vehicle
For more than two decades before Ingenuity’s first flight, a wide range of planetary aerial mobility concepts were proposed and explored, including both fixed-wing and vertical lift concepts. Early references of Mars aerial mobility concepts can be traced back to a solar-powered coaxial rotorcraft by Savu in 1995 (Savu and Trifu, 1995). In the early 2000s, Young and Aiken at NASA Ames Research Center produced some of the most influential and sustained analyses of how access to the third (aerial) dimension could transform planetary exploration and scientific return on Mars, Titan, and Venus, as documented in Aiken et al. (2000), Young (2000), and Young et al. (2000a, 2000b, 2000c, 2002, 2004, 2005b). Additionally, the American Helicopter Society (AHS) student design competition in 2000, sponsored by NASA and Sikorsky Aircraft, solicited proposals for Mars rotorcraft concepts; this spurred further interest in and visibility of a future Mars aerial explorer. Notably, the final awardees included a coaxial helicopter proposed by the University of Maryland (Datta et al., 2003) and a multirotor concept developed by the Georgia Institute of Technology (O’Brien, 2003). This is not an exhaustive catalog of all contributing influences but rather a set of examples that illustrate the progression of these design concepts.
Ultimately, a coaxial rotorcraft was chosen for the first flight, instead of other aerial platforms such as aerostats or fixed-wing aircraft, because of its ability to take off and land vertically without a runway, hover, and maneuver precisely above the terrain at low speeds, and also for the packaging compatibility of a configuration with the Mars 2020 mission. These strengths also position rotorcraft to support a wide range of future scientific investigations.
Rotorcraft Enabled Science
Exploration of Mars by rotorcraft has the capacity to revolutionize the science return of missions to Mars. The unique capabilities offered by rotorcraft have advantages in three key areas: range and coverage, access to hazardous terrain, and access to the atmosphere. Together, these attributes enable science that is difficult, or impossible, to achieve with traditional surface assets alone.
Range and coverage
Compared to a rover, rotorcraft significantly extend the geographic range of potential science investigations and increase the number of targets that can be explored, benefitting from observations made while traveling above ground level (AGL). Modern rovers are restricted to drive distances on the order of 100 m/sol. Assuming a conservative estimate of 1 km/flight and <1 flight/sol, a helicopter could reach a science objective 25 km away in 25 flights or less (achievable within 1 or 2 months). Conversely, a rover driving 3–5 times per week would require multiple years to reach 25 km of drive distance, albeit with larger payload capacity. While the path taken by a rover may be tortuous, a rotorcraft can more easily approach its target in a direct aerial path (i.e., “as the crow flies”). These enabling aspects facilitate game-changing missions, covering tens to hundreds of kilometers across the martian surface within plausible primary mission durations. For perspective, as mentioned previously, Opportunity traveled the farthest of any Mars rover to date. Opportunity required 14+ years to traverse 45 km. A next-generation multirotor rotorcraft, such as the Chopper concept, increases the conservative 1 km/flight to a projected rate of 3 km/day and could, therefore, cover the same distance that Opportunity covered over its lifetime in roughly 15 days (Grip et al., 2025).
Access to hazardous terrain
Rotorcraft can both fly close to the surface and interact directly with the terrain. Furthermore, vertical-lift platforms can be deployed from unprepared or otherwise inaccessible locations without requiring runway infrastructure. In contrast, rovers and landers are constrained by terrain roughness and hazards, which limit the areas of accessibility. As such, they have largely operated within regions of relatively accessible terrain, which do not always align with the sites of highest geological significance or astrobiological promise. Aerial vehicles are not constrained by terrain-based limitations in the same way as landers and rovers. When traversing, rovers typically avoid substrate that could pose a risk to mobility (e.g., aeolian bedforms). Rovers are conventionally restricted to coarse-grained-to-bedrock surfaces with slopes less than ∼30°. An aerial vehicle can bypass impassable terrain and access steeply sloping terrain, including vertical cliffs and overhangs. While in flight, rotorcraft can inspect these locations at proximity (<10 m) with minimal risk. Access to steep slopes allows access to exposed bedrock strata, which would enable measurements of time sequences of geological processes operating through Mars’ past (Edgar et al., 2020).
Access to the atmosphere
Rotorcraft enable access to the vertical dimension and the martian atmosphere. The boundary layer, which extends ∼5–10 km above the surface, and where rotorcraft will operate on Mars, signifies a previously inaccessible region of Mars. The boundary layer is important scientifically because it captures surface–atmosphere interactions which ultimately dictate the exchange of heat, momentum, dust, and volatiles between the surface and the atmosphere. Since previous landed assets cannot directly measure atmospheric properties greater than ∼2 m above the local surface, our understanding of the boundary layer is based largely on theory and measurements taken during entry, descent, and landing (EDL) of previous landed missions. Rotorcraft could extend vertical access to 1 km AGL or more and thus enable acquisition of vertical (and lateral) profiles of temperature, pressure, windspeed, dust, water, and so on. Vertical profiling of wind speed was a key demonstration as part of Ingenuity’s later flights (Jackson et al., 2025). Vertical mobility is invaluable to measurements concerning the crustal magnetic field, which are important in understanding Mars’ early history, as well as gravity anomalies that may reveal secrets about Mars’ crust (Sori et al., 2023). Lastly, any proposed EDL architectures involving mid-air deployment (Delaune et al., 2022) would offer a science opportunity before the vehicle lands on the surface.
Astrobiology-Relevant Enabled Science
Rotorcraft offer unique capabilities that can be leveraged to address a wide range of astrobiology investigations. Astrobiology, an interdisciplinary field, relies on the foundation and synergies between relevant areas of science. Below is a non-exhaustive list of compelling astrobiology-related science that could be transformed by rotorcraft exploration.
Subsurface cavities and potential refugia
Caves represent one of the best localities for finding evidence of life on Mars, given their protection from harmful radiation and the potential for microclimates (Sam et al., 2020). Over 1000 subsurface cavities have been mapped (Cushing, 2012). These features offer subsurface access without the need for a deep drilling payload and are ideal locations for potential human habitats needing protection from UV irradiation. Trace gases
Measuring minor gas species can reveal active processes happening today. Species such as methane (Webster et al., 2015) may indicate geological activity or, more intriguingly, possible biological sources, since they break down quickly and must be continually replenished. Rotorcraft are especially well fit for measuring trace gases given their ability to move rapidly and in horizontal and vertical dimensions through the atmosphere. Geologic mapping
Geologic mapping is essential for planetary exploration because it reveals the history of surface processes that shape a planet over time. For astrobiology, these efforts help identify environments that may have been habitable in the past and guide the selection of sites where potential biosignatures are most likely to be preserved and detected. In addition, pre-mapping of traverses and exploration zones for crewed missions could significantly contribute to optimization of crew time. Rotorcraft enable highly resolved panoramic and close-up surveys of the martian landscape; this makes them an unmatched tool for carrying out geologic mapping (Gwizd et al., 2024; Stack et al., 2025). There are many tantalizing locations across Mars where geologic mapping is warranted (Ehlmann and Edwards, 2014)—examples ripe for rotorcraft exploration include potential ancient spring deposits (Allen and Oehler, 2008) and mud–volcanoes that may have extruded subsurface materials from organic-rich locations (Oehler and Allen, 2010). Sampling or sample retrieval
Returned or in situ samples allow scientists to perform detailed chemical, mineralogical, isotopic, and biological analyses that far exceed the capabilities of remote instruments. Sampling systems for future Mars rotorcraft are underway (Chen et al., 2025). Recovery of cached samples, especially those that may be dispersed across challenging terrain, is a relevant use case and was explored in the Sample Recovery Helicopter concept (Mier-Hicks et al., 2023). Planetary protection
Planetary protection is essential to astrobiology because strict cleanliness prevents Earth microbes or organic contaminants from being mistaken for life—or the potential for that process to act in reverse. It also preserves pristine environments so that future measurements reflect natural processes rather than human contamination (Spry et al., 2024). The spatiotemporal nature of particle transport on Mars is poorly understood (Ayoub et al., 2014), which includes possible contaminants delivered by robotic and human explorers. Rotorcraft could trace particle motion by imaging the surface before and after flights to detect changes in disturbed particles caused by winds or rotor downwash. Repeated observations over time, and with measurement of other environmental factors like wind, could assist us in understanding particle transport under Mars’ thin atmosphere.
The state of the art has advanced dramatically since the Viking landers returned their last data sets, not only in scientific methodology and instrumentation but also in the engineering platforms available to host payloads. Aerial vehicles are inherently well-suited to modern astrobiology investigations: they can rapidly sample multiple locations, although experimental design needs to consider issues such as downwash (the stream of air pushed downward by a helicopter’s spinning rotor blades). Moreover, deploying multiple rotorcraft enables diverse or complementary payload configurations, ensuring that once a promising site is identified, the necessary diagnostic measurements can be obtained without waiting for additional follow-up missions or a many months’ trek to return to a promising site.
Ingenuity was small but mighty. Ingenuity had a rotor diameter of 1.21 m and weighed 1.8 kg. It primarily consisted of a lightweight structure built around its rotor system, an avionics box, landing gear, solar panel, and lithium-ion batteries, which enabled flights up to ∼170 s covering 700+ m at altitudes up to 24 m (Fig. 1). Although it carried no dedicated science payload, Ingenuity’s navigation cameras provided valuable support to Perseverance’s mission objectives. Powered flight had not previously been attempted on Mars because of the extremely thin atmosphere, which is only about 1% the density of Earth’s atmosphere. Advances in power systems, lightweight materials, avionics, sustained advocacy, and an evolving risk posture ultimately made the demonstration possible. Because of budget and timeline constraints associated with a technology demonstrator, compared with flagship missions, Ingenuity was also the first Mars surface spacecraft to rely heavily on COTS components such as its Snapdragon processor (Tzanetos et al., 2022).

Ingenuity Mars helicopter diagram. Figure re-purposed from (Aagren 2025).
Ingenuity marked a major technological leap, yet its development and subsequent operations have highlighted numerous opportunities to further expand the capabilities of future rotorcraft. These topics include material development, power systems, processing capabilities, navigation, rotor design, payload capability, ability to interact with the environment, and thermal management. Some of these areas are expanded below.
Because Ingenuity was developed as a rapid technology demonstrator with limited time and resources, its vision-based navigation system was designed primarily for hover or low-speed flight conditions. It relied on a flat ground assumption and adequate feature richness in the terrain to provide state estimates of the vehicle. To extend Ingenuity’s mission, the team was required to develop and test software upgrades on ground-based engineering units before uplinking changes to the asset on the planet to permit feature-tracking capabilities at faster forward flight speeds. Similarly, operational strategies to mitigate the adverse impact on navigation of steep terrain variations were developed as the mission progressed. In this way, Ingenuity itself served as an on-planet testbed for future Mars rotorcraft. Since then, visual navigation methodology has advanced and been demonstrated in relevant environments to scientific areas such as those identified by Fraeman et al. (2025) to enable future aircraft to fly over more complex terrain such as an ascent up a canyon wall or across a rocky field.
Thermal
Previously, thermal systems were designed with a base requirement to keep the spacecraft powered and avionics warm through cold martian nights. On Sol 426, due to a combination of time of year, degradation of the hardware, and dust accumulation on the solar panel, Ingenuity ran out of power and shut off, unable to even keep the avionics warm. In the morning, however, once the sun reactivated the solar panel, Ingenuity recharged and was able to turn back on. This cold cycling of the helicopter’s components was expected to add lifetime risk to the electronic components (Tzanetos, 2022). This was especially significant as much of Ingenuity’s hardware, such as its Snapdragon processor, was COTS (Ogbe et al., 2025). Ingenuity continued to cold cycle each night for much of its lifespan, challenging conservative assumptions about the need to reserve power during mission operations to keep avionics and other hardware warm at night and offering an alternative thermal management risk posture approach for future missions.
Rotor design
Rotor efficiency plays a major role in determining a rotorcraft’s overall performance. Advances in aerodynamics and materials will make it possible to develop future Mars rotors that are more efficient, lightweight, and structurally robust. The Rotor Optimization for the Advancement of Mars eXploration project (Cummings et al., 2022) at NASA Ames Research Center has developed new tools to optimize airfoils and rotors aerodynamically, while AeroVironment, Inc. has developed lighter materials for the rotors. Recent research suggests that thin airfoils with sharp leading edges have significant aerodynamic benefits in low Reynolds’ number environments like Mars’ atmosphere, but the thickness of the blade must be balanced with manufacturability and rigidity requirements (Koning et al., 2024). Additionally, launch and re-entry loads should be considered.
A series of test campaigns funded by NASA’s Science and Technology Mission Directorate, the Mars Sample Return Program, and the Mars Exploration Program have considered airfoil shape, the ability to operate rotors at transonic tip speeds, the effect of high solidity, and the impact of wind gusts. High solidity rotors, which have more chord to increase surface area, risk decreased efficiency because of the required power to operate them, yet they would enable heavy vehicles while still meeting tight packaging constraints for transit to Mars. Next-generation rotors have been successfully tested to tip Mach numbers > 1.0 with gusts (NASA Jet Propulsion Laboratory, 2026). On Earth, it is best practice to keep advancing tip Mach numbers in the subsonic range to mitigate shock formation/drag divergence that can lead to high power and blade loads. However, Mars rotors with thin airfoils are not showing immediate drag divergence when approaching transonic conditions (Schatzman et al., 2024). This has fundamental significance for the aerodynamics community, particularly in advancing the understanding of fluid-flow behavior during transitions between flight regimes. For mission planning, it means that margins can be reduced, enabling more performance, and that the rotors are able to tolerate moderate gusts.
Payload capability
The performance improvements described above are ultimately significant because they enable increased range/hover time and/or larger payloads. A concept for a set of two identical coaxial helicopters, the sample recovery helicopters (SRH), was developed under NASA’s Mars Sample Return Program, intended as a backup for the Perseverance rover, to bring back samples of martian materials to Earth (Withrow-Maser et al., 2023). Even with <9% increase in rotor radius relative to Ingenuity, these vehicles were predicted to be able to also support a driving system with wheels, a robotic arm, and a payload of a 150 g sample tube. The SRH design (Fig. 2), which advanced beyond Preliminary Design Review maturity, remained an important milestone even though that iteration of Mars Sample Return was ultimately cancelled. It demonstrated that a rotorcraft–rover hybrid is feasible, merging the reach and agility of flight with the ground mobility and surface-interaction capabilities of wheels and robotic arm systems typically found on a rover. The robotic arm enables the vehicle to interact directly with its environment, which enables significant science and exploration as well as the ability to carry additional science instruments as payloads (Mier-Hicks et al., 2023).

Sample recovery helicopter. Repurposed from Withrow-Maser et al. (2023).
Additionally, larger vehicles have been designed. Many concepts have emerged post-Ingenuity that are range of sizes, from the U.S. government, U.S. academia, U.S. industry, and international contributors. These concepts range from multirotors to tailsitters, long-range vehicles, and ornithopters. The largest published mature design to date is the Mars Chopper concept (Grip et al., 2025; Withrow-Maser et al., 2025), a hexacopter capable of carrying 5–10 kg of science payload and operating independently of a lander or rover (for relayed comms). Independence from a ground-based vehicle is a critical capability, as it enables the rotorcraft to access terrain that a surface vehicle cannot traverse. A rendering of the Chopper concept is shown in Figure 3.
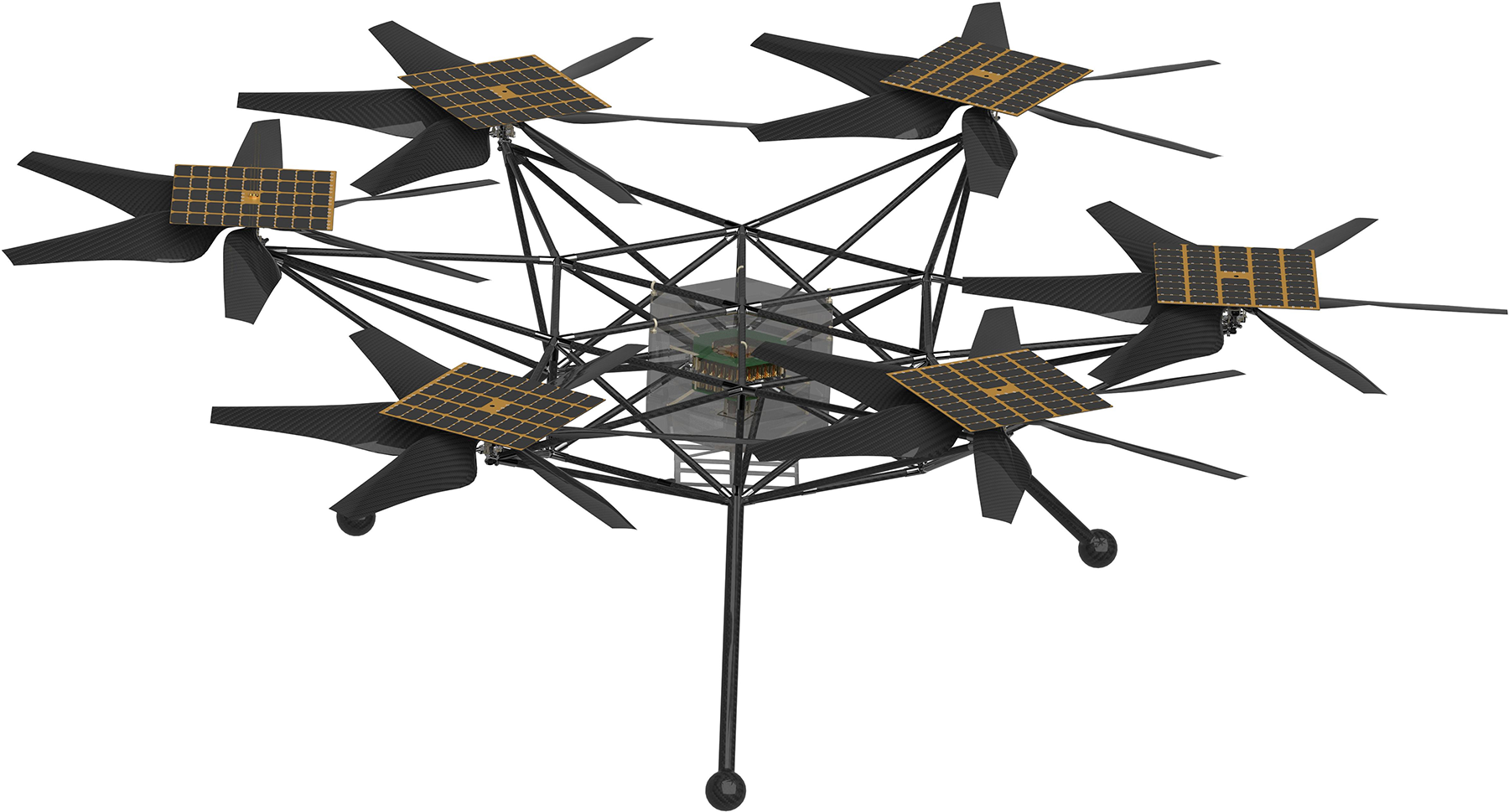
Rendering of the Chopper hexacopter concept. Repurposed from Grip et al. (2025).
Ingenuity was mounted beneath the Perseverance rover, shielding the rotorcraft from the extreme aerodynamic and thermal conditions of EDL. This configuration also allowed for a deliberate, unhurried deployment and checkout sequence once on the surface. To broaden future launch opportunities and mission flexibility, however, next-generation rotorcraft will likely need to assume a more active role in their own delivery to the martian surface. Two concepts under study are mid-air deployment and entry, descent, and flyaway (EDF). Mid-air deployment concepts were explored shortly after Ingenuity’s first flight, but were considered very risky due to the difficulty of verification and validation of such a maneuver. Therefore, a concept called EDF was also matured that would reduce risk by adding a jet pack platform to slow down the helicopters before release above the martian surface. The jetpack concept is currently at design maturity level TRL 4.5 (Delaune et al., 2022). Helicopter-only mission concepts have been revisited now that aerodynamic models have been substantially validated by Ingenuity’s on-planet flights (Aagren et al., 2025), and as the Dragonfly Titan rotorcraft team has also advanced the mid-air deployment approach. It is important to note, however, that a Mars vehicle would experience significantly higher descent velocities than on Titan due to Mars’ much thinner atmosphere. Either approach creates significantly more launch opportunities for future Mars rotorcraft.
Multiplying Capability: Multi-Agent Systems and Swarm Intelligence
For certain mission architectures, further scaling of the aerial platform may be impractical due to packaging or other mission-driven concerns. Instead, increasing the number of flying agents may provide greater mission utility and robustness by enabling more extensive, adaptive, and cost-effective exploration than relying on a few larger platforms. For example, the Skyfall mission concept at NASA’s Jet Propulsion Laboratory, AeroVironment, Inc., and NASA Ames Research Center combines the redundancy of multiple rotorcraft with the benefits of mid-air deployment, using a small fleet of Ingenuity-sized vehicles released directly from the aeroshell (AeroVironment, Inc., 2025). In addition to its scientific value, Skyfall has also been identified as a potential precursor capability for future human exploration of Mars. In this use case, the Skyfall helicopters would be able to perform parallel scouting, map resources, and look for water deposits at sites of interest for crewed landing once on the surface.
In the future, a group of Mars flyers may introduce a bridge to the use of swarm intelligence for planetary exploration. In distributed systems with decentralized control—that is, swarms or clusters—each agent relies on local interactions to achieve collective objectives. Higher-level global mechanisms or patterns emerge naturally from local behaviors. Such autonomous coordination could not only improve efficiency in completing certain tasks but also enable entirely new operational and analytical capabilities that single agents cannot achieve. The swarm can collectively solve problems, perform complex tasks autonomously, and adapt to unforeseen circumstances without central oversight; as such, it has the potential to enhance mission autonomy, resilience, and operational flexibility. Leveraging such frameworks, the deployment of swarms of low-cost aerial vehicles on Mars may offer multiple mission advantages: intrinsic fault tolerance by the sheer number of agents, resilient and autonomous exploration of previously unobserved terrain, coverage of larger areas in shorter timeframes, generation of detailed 3D maps and environmental models, local state sharing for navigation and coordination, simultaneous multi-point measurements, and collaborative payload transport (Young et al., 2004).
This philosophy reflects a broader paradigm shift toward multiagent, collaborative spacecraft systems (D’Amico et al., 2015; Schranz et al., 2021). NASA’s Starling mission at NASA Ames Research Center investigates the applicability of distributed systems to CubeSats in low Earth orbit operating under swarm intelligence principles (Sanchez et al., 2018). In the context of Mars rotorcraft, early efforts explored utility of biomimetic behavior for Mars aerial scouts (Plice et al., 2003; Young et al., 2005). Efforts certainly demonstrate both the technical feasibility and growing interest in swarm-enabled exploration, yet the adoption of such in operational planetary missions remains in its infancy. Continued advances in terrestrial unmanned aerial vehicle swarm research are expected to further accelerate the maturation of these technologies (Javed et al., 2024).
Concluding Thoughts
Fifty years ago, when Viking first landed on Mars, the notion of a spacecraft collecting data over an extended period of time, even from a single location, was both novel and high-risk. However, once that leap was made, ranging rovers soon followed ∼20 years later, and now Ingenuity has opened the door to powered flight on Mars and other planetary bodies of interest. In another 50 years, many more technologies that are currently difficult to even envision will likely be part of the exploration toolkit. For example, the authors predict that the next era of planetary exploration will include both monolithic rotorcraft platforms and distributed systems composed of multiple cooperating aerial vehicles—emphasizing resilience, adaptability, and operational efficiency for future Mars missions. Additionally, the introduction of human explorers working alongside multi-agent robotic systems will be equally transformative, creating an integrated ecosystem in which humans, aerial vehicles, and ground assets collaborate to achieve ambitious science and exploration goals. Within this evolving landscape, the role of human–robot teams becomes even more significant. Human teams, on planet, supported by fleets of aerial and surface vehicles would be able to process and interpret results in real time, dramatically accelerating discovery.
Rotorcraft are a vital part of this emerging multiagent, mission-planning ecosystem. They offer wide-area surveying, close-range scientific investigation, and access to terrain that would otherwise be difficult or hazardous to reach. Even with human scientists on the surface, rotorcraft would reduce risk by retrieving samples from inaccessible locations, assisting with path planning, and providing in-field emergency support. Yet the field of Mars aerial mobility is still in its infancy, and much remains to be learned about the limits and full potential of these vehicles and the science they enable. Realizing a future of expanded exploration capabilities will require sustained technical effort and support. The next generation of students, engineers, and scientists must remain engaged and be provided with the resources and opportunities necessary to bring this vision to life. For the young engineers of today, this era of exploration is an open invitation to help shape the discoveries that lie ahead.
Footnotes
Acknowledgments
The authors would like to thank the Mars Exploration Program, the NASA Ames New Business Council, and the Subsonic Vehicles Technologies and Tools project for providing support for this work. Additionally, portions of this research were carried out at the Jet Propulsion Laboratory, California Institute of Technology, under a contract with the National Aeronautics and Space Administration (80NM0018D0004). The authors would also like to thank Dr. Wayne Johnson, Dr. Carlos Malpica, and Larry Young for providing mentorship and feedback on this work.
Author Disclosure Statement
No competing financial interests exist.
Funding Information
This work was funded by the Mars Exploration Program, the NASA Ames New Business Council, and the Subsonic Vehicles Technologies and Tools project. Additionally, portions of this research were carried out at the Jet Propulsion Laboratory, California Institute of Technology, under a contract with the National Aeronautics and Space Administration (80NM0018D0004).
Associate Editor: Michael A. Meyer
{kind=link}
{kind=link}