
Abstract
The threat detection system based on short-range radars is an essential part of the active protection system (APS) of armored vehicles. The multi-radar data fusion problem is one of the crucial issues in the APS. Firstly, a general algorithm for multi-radar coordinates transformation is given. Then, based on the weighted fusion model and the trajectory characteristics of targets in the APS, a real-time dynamic weighting factor derivation algorithm is proposed. The algorithm is simulated in a dual-radar threat tracking and ballistic prediction scenario. The results prove the correctness and effectiveness of the algorithm.
1. Introduction
The active protection system (APS) is a self-defense system used by armored vehicles to intercept and destroy anti-tank missiles or projectiles. 1 The system consists of the following three parts: the first part is the threat detection system, which detects threats to the vehicle on the battlefield; the second part is the signal processing and decision-making system, which is responsible for processing, analyzing, and making countermeasure decisions; the third part is the confrontation system, which uses a close-range anti-missile defense system to intercept and destroy threats before they hit the vehicle. 2 The system structure of the APS is shown in Figure 1.
The structure of the active protection system.
In order to ensure that the intercepting ammunition accurately intersects with the incoming target, it is necessary to obtain information such as the distance, speed, and orientation of the target. Short-range radars installed in different orientations of the vehicle body are usually used to achieve an omnidirectional detection. Therefore, an incoming target in the overlapping coverage area of multiple radars (see Figure 2) may generate several tracks, which need to be fused to a single and more accurate track. In recent years, methods and technologies for the radar data fusion problem have been continuously proposed in various research fields. Xu et al. 3 discussed three fusion criteria: one is based on the covariance matrix of estimation error, the second is dependent on the infinite normal number, and the last is related to the element of the state vector. Sarunic and Rutten 4 described an algorithm for associating and fusing multipath tracks in over-the-horizon radar, which used a model-based approach to incorporate track history in its computation of association probabilities and fused estimate calculations, thus exploiting temporal as well as spatial relationships. Bradaric et al. 5 used the multistatic ambiguity function to describe the relationships between the system parameters and different performance measures, and then computed the best weighting coefficients for combining the signals from multiple receivers. Shu and Liang 6 derived multi-input multi-output fusion rules based on the target fluctuation model and compared them against the optimal likelihood ratio method (LR), maximum ratio combiner (MRC), and equal gain combiner (EGC). Soysal and Efe 7 proposed a new data fusion scheme comprising a covariance intersection algorithm and particle filtering. Charlish et al. 8 analyzed state of the art algorithms for track-to-track fusion assuming range-Doppler radar measurements, including a central Kalman filter, Naive fusion, and variants of the distributed Kalman filter. Wang et al. 9 introduced several robust, practical track fusion algorithms, such as track-to-track association, track fusion, and track management.
A target in the overlapping coverage area.
The weighted average method is a common method in data fusion, which can effectively synthesize multi-sensor information and improve the accuracy of data after fusion. 10 In the field of radar track fusion, there are also many studies based on the weighted fusion algorithm. Li et al. 11 calculated the relative radar accuracy by using least-square fitting, and applied radar tracking precision to be the integration of the weighted average method through the fusion of the track-to-track reference. Zhang and Qu 12 derived weighted mean coordinates with the covariance matrix of the sensory, covering the radial distance and the angles. Liu 13 set up a trajectory membership matrix based on the fuzzy clustering algorithm, calculated ballistic collection trajectory weights in real-time, and fused the trajectory data with corresponding weights. Yang et al. 14 proposed a novel data fusion algorithm to combat the false data injection attack, which introduced data confidence factors into data fusion and adaptively decreased the fusion weights of the injected data.
However, related research in the field of the APS is still relatively rare. Since the target of the APS is high-speed moving ammunitions, their flight duration in the radar detection range is extremely short, so the system is required to achieve rapid real-time fusion calculation of radar data. Besides, the onboard short-range radars used in the APS are susceptible to environmental factors, such as terrain, ground surface characteristics, and target azimuth. It is difficult to accurately estimate the accuracy of the track in traditional weighted averaging methods.
In this paper, a real-time fusion algorithm was proposed for the APS. The spatial alignment of multi-radar is completed by coordinate transformations. Based on the idea of weighted fusion, the data characteristics of target tracks are analyzed, and a weighting factor derivation algorithm is proposed to achieve the dynamic accuracy estimation and real-time multi-radar track fusion. The effectiveness of the algorithm is verified using a recursive least-squares ballistic prediction method in simulation experiments.
2. Coordinate transformations
In order to perform the fusion algorithm to tracks from different radars, the tracks should be transformed into a single coordinate system. Firstly, the tracks are transformed from the spherical coordinate system used in radar detection to the Cartesian coordinate system. Then the coordinate systems of each radar are translated and rotated to the same location and direction.
2.1. Spherical coordinate system of radars
The coordinate system used by radars in the APS of this paper is shown in Figure 3. The azimuth is

The coordinate system of radars in the active protection system.
This spherical coordinate system can be transformed into a three-dimensional Cartesian coordinate system according to Equation (1). The
2.2. Cartesian coordinate system transformation
Considering a point
Similarly, the transformation matrices
Considering a point
Similarly, the transformation matrices
Then the coordinate of the point

3. Multiple radar track fusion
3.1. Architecture of the weighted fusion algorithm
The fusion algorithm used in this paper is also based on a weighted fusion model. Considering a system with K radars to detect one target, the measurement of radar i at time t is

where

The core of the fusion model is the algorithm for weighting factor derivation. The weighting factor derivation algorithm should adequately reflect the accuracy of each radar’s measurement.
3.2. The weighting factor derivation algorithm
Because the working conditions of the APS are complex and variable, and the radars are susceptible to environmental factors, it is not appropriate to use the rated accuracy as the basis for weighting. Instead, the accuracy should be estimated online based on the measured data. Since the real ballistic trajectory cannot be obtained under actual working conditions, it is difficult to calculate the accuracy of the radar data directly. One idea is to take the arithmetic mean of the measurements of each radar as the reference, and then calculate the deviation of each radar. 15 However, the reliability of the reference value thus obtained decreases as the number of radars in the system decreases. Usually, for the onboard radars in the APS, only two radars can discover the same target at the same time. Therefore, taking the arithmetic mean as the reference cannot reflect the difference between the two radars. Considering the characteristics of the target trajectory of the APS, the linearity of the radar track is taken as the weighting indicator in this paper.
The target of the APS is high-speed moving ammunitions. In the radar detection range, the gravity has little influence on them, and their trajectories can be approximated as straight lines. Therefore, the trajectories can be predicted by a linear fit of the radar tracks using the least-squares method.
16
At time t, the difference
(a) At period N, let the extrapolated coordinate of radar i be

(b) For each radar, calculate the variance of deviations at all periods recursively. The recursive form of the variance formula is shown as Equation (12):

(c) The weighting factors of each radar are derived from Equation (13):

(d) Calculate the fused coordinate
(e) Update the parameters
In Equation (14),
In order to start the recursions, the initial values of


(f) At the next period
4. Simulation
In this section, the effectiveness of the proposed algorithm is verified by simulation experiments. The coordinate transformations of different radars are omitted here, and only the weighting process of the algorithm is considered. In the simulation scenario, two radars are used to detect the same incoming target, and an imaginary real trajectory is established. The target is flying at a uniform speed of about 230 m/s. The starting point of the track is about 120 m away from the coordinate origin (i.e., the launch point of the intercepting ammunition). The radar detection period is 3 ms. The measurement errors of both radars satisfy the normal distribution with a mean of
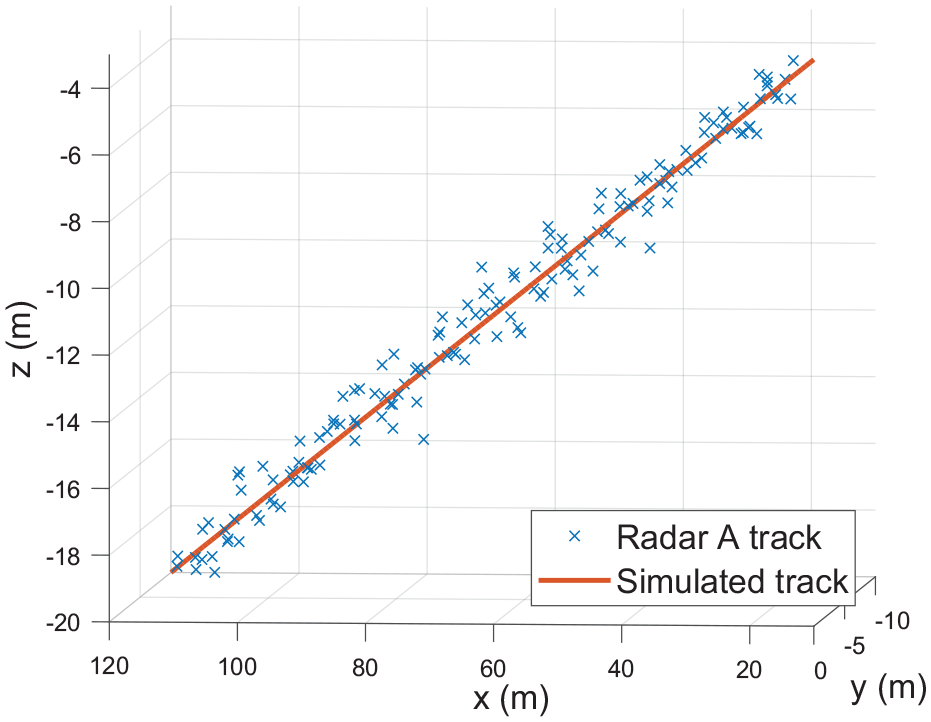
The simulated target trajectory and the track from radar A.
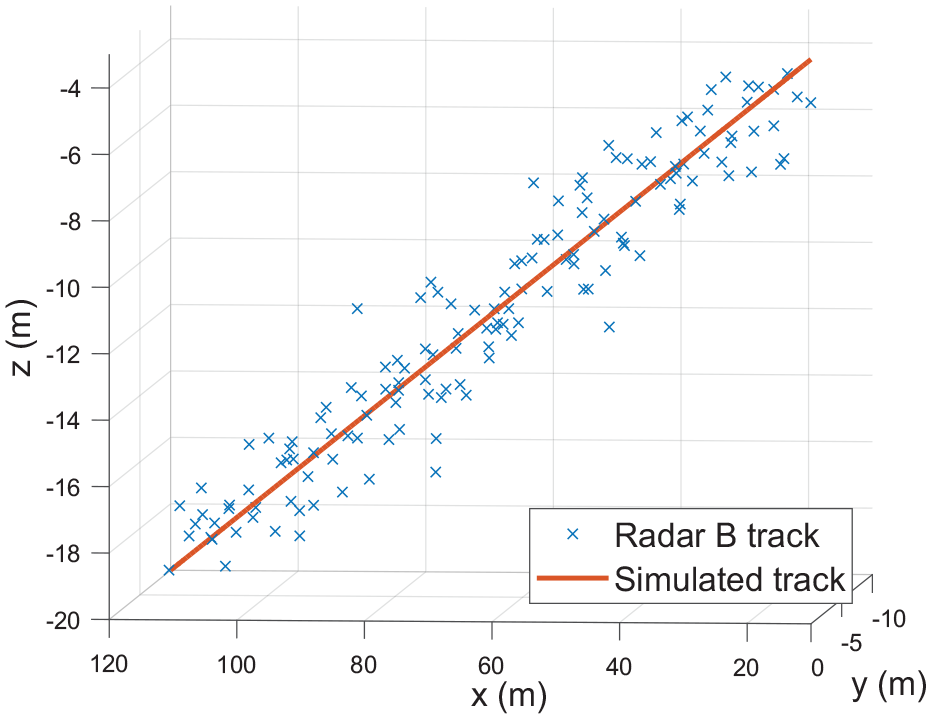
The simulated target trajectory and the track from radar B.
With the algorithm proposed in this paper, recursive fusion and fitting are started from the beginning of the track. In the APS, in order to set aside time for the flight of the intercepting ammunition, the recursive fitting process can only proceed to the cutoff distance
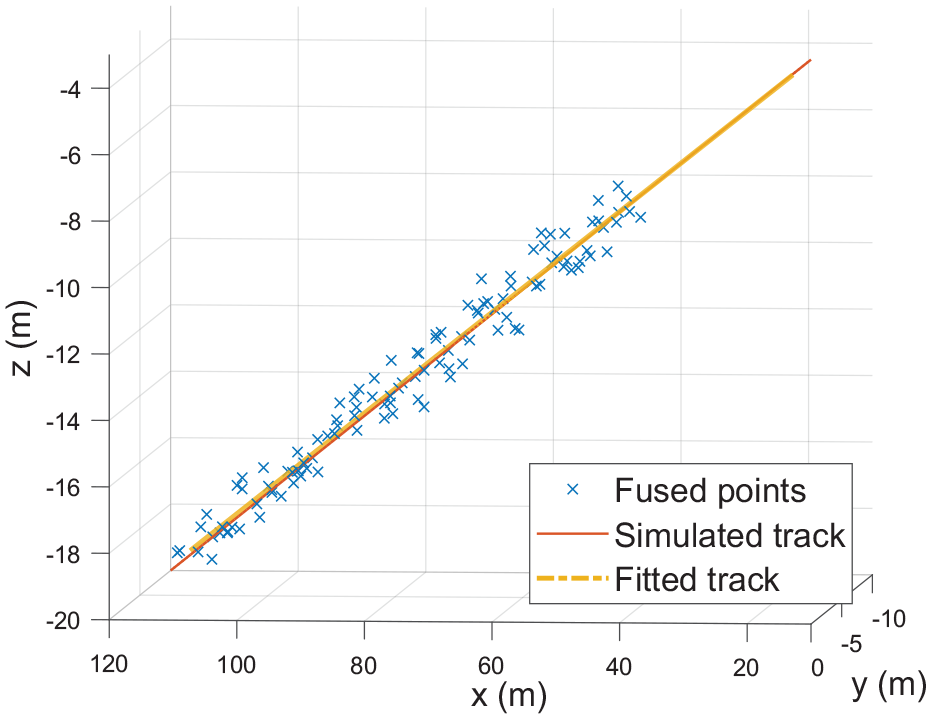
The fitted track after fusion and the simulated track.
In order to compare the fitting quality before and after the dynamic weighted fusion, the Euclidean distance
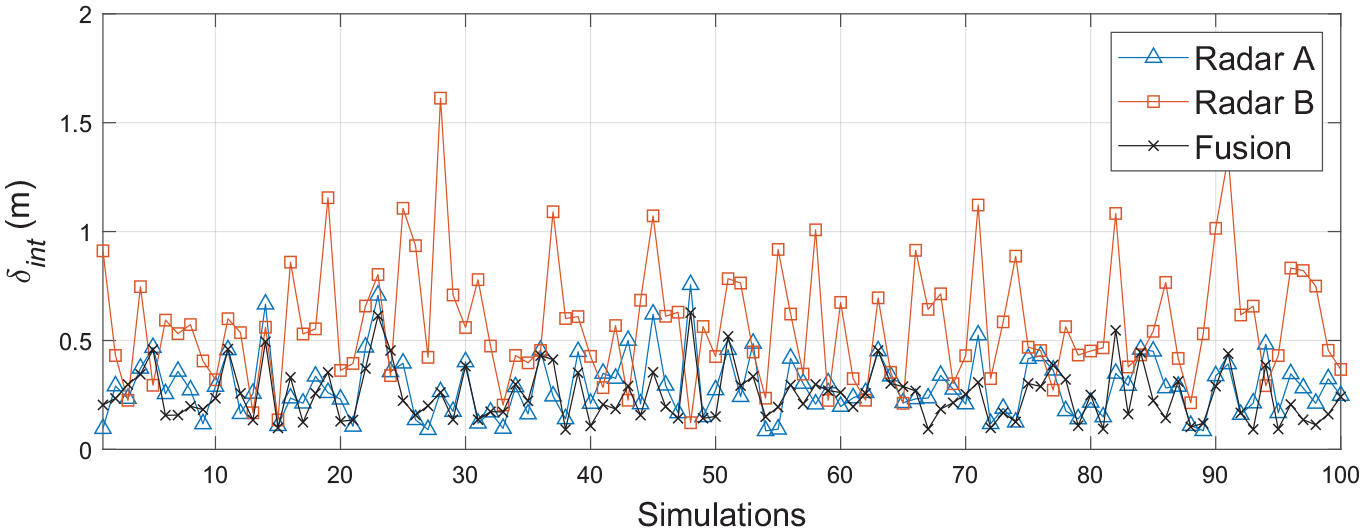
Comparison of the simulation results of the fused track and original radar tracks.
Since the measurement variance of each radar in the simulation environment is known, the optimal fusion weight with the smallest mean square error can be derived as follows 10 :

In order to verify that the dynamic weighted fusion algorithm (DWF) can effectively estimate the accuracy of each radar, the algorithm was compared with the optimal fusion algorithm based on Equation (18) and the arithmetic mean fusion algorithm (AMF; i.e., the weighting factors of the two radars are both
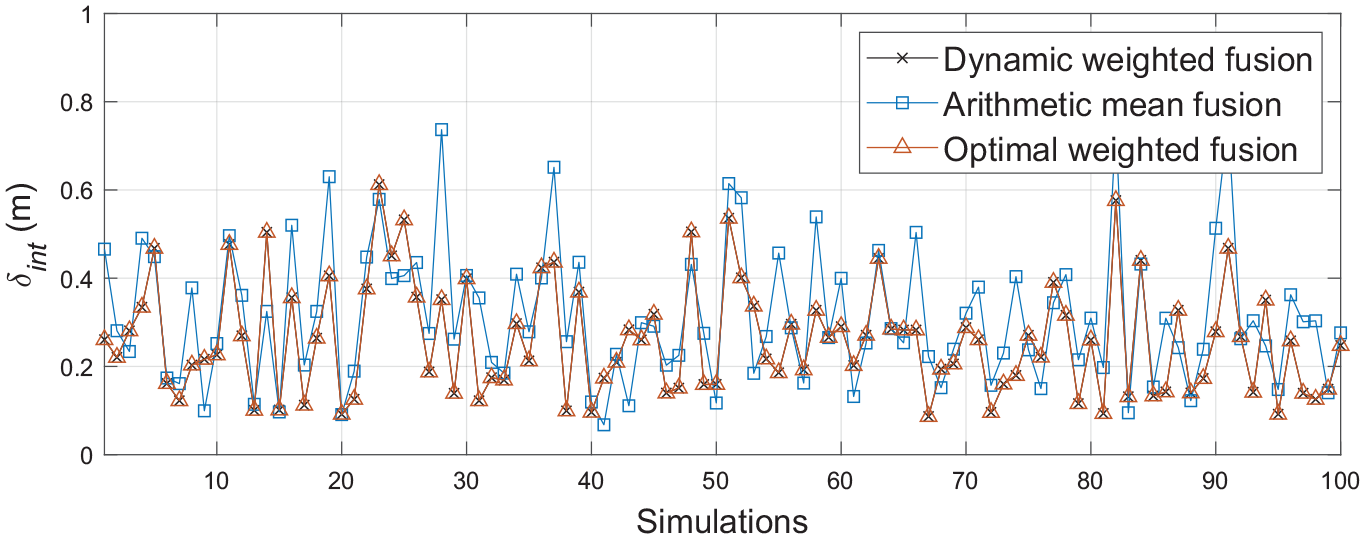
Comparison of the simulation results of the three fusion algorithms.
The mean square errors of the simulation experiments are summarized in Table 1. In the 100 Monte Carlo simulation experiments, the prediction accuracy of the proposed DWF is very close to that of the optimal fusion algorithm, and it is better than that of the single radar fitting and the AMF. The mean square error of the intercept point prediction is
Comparison of the fusion algorithm simulation results.
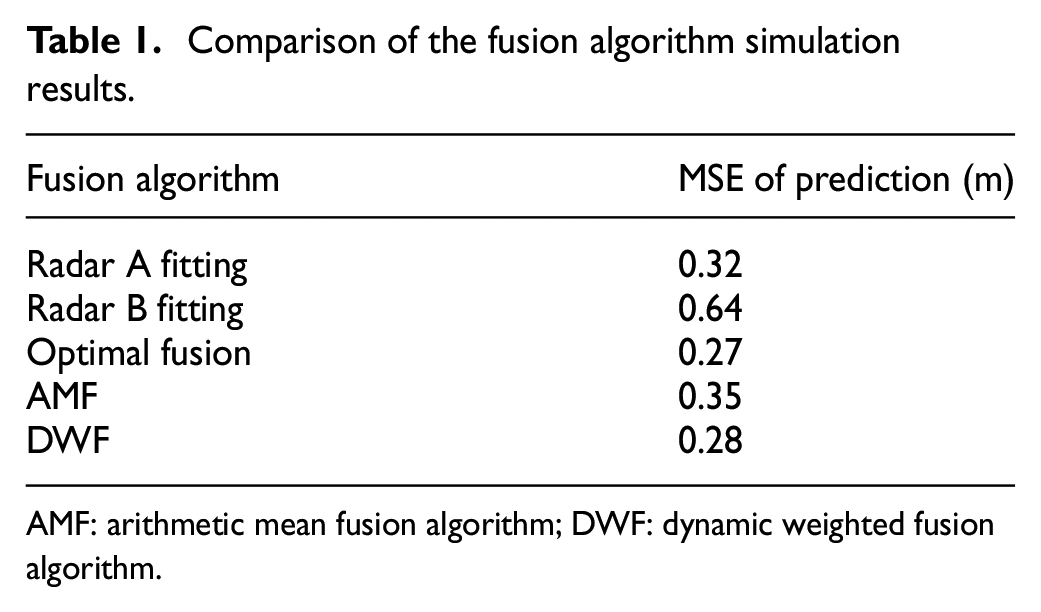
AMF: arithmetic mean fusion algorithm; DWF: dynamic weighted fusion algorithm.
5. Summary
Multi-radar data fusion is one of the crucial issues in the APS of armored vehicles. In this paper, a real-time fusion algorithm was proposed for the APS. Firstly, the coordinate transformation algorithm of multi-radar measurements was given to complete the spatial alignment of radar data. Then, based on the weighted average fusion model, the recursive weighting factor derivation algorithm was proposed according to the extrapolation error variance. The algorithm is simple to implement, fast in calculation, and low in resource consumption, which is compatible with the requirements of the APS. Simulation experiments verified the correctness and effectiveness of the proposed algorithm.
Footnotes
Declaration of conflicting interests
The authors declare that there is no conflict of interest.
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.