
Abstract
This paper presents a comprehensive study on determining an optimal launch angle for the projectile trajectory with considering meteorological conditions. First, the optimization problem for the optimal launch angle is shown with presence of the meteorological conditions. Next, the methodology scheme based on artificial neural networks is designed in detail. The methodology includes two neural network models, the first one is for approximation of the projectile trajectory and the latter is for the launch angle optimization. Moreover, the convergence of the proposed method is also presented and discussed. In this paper, the simulation is built on a large test set to compare the performance between the proposed method and existing algorithms. The simulation results show that the proposed method and a variant of it produce significantly better results than existing algorithms. Finally, it is emphasized that this study not only contributes to military benefits but also contributes to many applications in aerospace, sports, and other fields requiring the precise ballistic trajectory.
Keywords
1. Introduction
The study of the optimal launch angle for projectile trajectories has long been a critical aspect of the military science and technology. The trajectory of a projectile, whether a bullet or artillery shell, is influenced by numerous factors including the initial velocity, the launch angle, air resistance, gravity, and so on. In additional, meteorological conditions also significantly affect the path of a projectile. 1 Wind speed, wind direction, pressure, and temperature of the atmosphere can all markedly affect the flight dynamics of the projectile trajectory. Wind can alter the course of a projectile, leading to deviations from its intended path, while variations in the atmosphere can influence the air density and thus the drag force affecting the projectile. Therefore, a thorough understanding of these meteorological influences is crucial for accurately determining the optimal launch angle to achieve high accuracy in an actual combat.
To solve this problem, some methods were studied with their own advantages and disadvantages. The firing table method2,3 provides precomputed reference tables for cannon artillery, in which launch angles are determined under standard meteorological conditions and with the assumption of equal initial and final heights. Then, these offset angles were added to compensate for nonstandard conditions such as wind, the difference between initial and final height, propellant temperature, and Earth’s rotation. A hybrid method 4 offered higher accuracy by combining the use of iterative 6-degrees-of-freedom (DOF) calculation and firing tables together for artillery projectiles. However, the slow convergence rate remained a major drawback of traditional iterative methods. Recent improvements in computational power and numerical methodologies significantly advanced the field of projectile motion analysis. Iterative techniques, including the Newton–Raphson algorithm and its modifications,5–7 proved effective in resolving the complex nonlinear equations governing artillery trajectories. These algorithms are distinguished by their rapid convergence and high accuracy, making them particularly suitable for real-time applications in the fluctuating conditions of a battlefield. However, they often require a good initial launch angle to ensure convergence, which are challenging in practice. In some cases, a poor initialization may lead to slow convergence or failure within the allowable time.
The application of neural networks in this paper offers several key advantages. First, artificial neural networks (ANNs) can be trained on extensive datasets that include a wide range of launching conditions and projectile behaviors, enabling them to generalize well to new scenarios. This flexibility is particularly beneficial for adapting to real-time changes in battlefield environments, such as varying wind speeds, temperatures, and target movements. In addition, neural networks provide rapid computation once trained, facilitating quick decision-making in time-sensitive situations. Neural network models have demonstrated substantial promise in solving complex aerospace problems, including flight path prediction.8,9 Their ability to model intricate, nonlinear relationships between input variables and outcomes surpasses the limitations of traditional methods. This capacity is vital in applications requiring precise trajectory calculations under dynamic conditions.
In this paper, the implementation of neural networks is explored to determine the optimal launch angle of artillery projectiles. By comparing its performance with existing methods, the potential improvements in accuracy and efficiency that neural networks are highlighted. Through this investigation, the aim is to contribute to the advancement of modern artillery systems, enhancing their operational effectiveness and adaptability in diverse combat scenarios. The main contribution of the proposed method is concluded as the following:
– Allows meteorological conditions to be included in the trajectory simulation.
– In comparison with the works in the same field, the proposed method converges in less time.
– Ability to provide the good results even on the highly diverse and unprecedented scenarios because of the prediction of ANNs.
2. Problem statement
Consider the projectile trajectory model as the point mass model with the equation of projectile motion given by Newton’s second law as the following 10

where

Evidently, it is possible to calculate the horizontal range from a specified launch angle and meteorological conditions through the use of mathematical models of the projectile from Equations (1) and (2). However, the inverse problem of finding the optimal launch angle for a specified horizontal range and existing meteorological conditions cannot be directly solved via mathematical models. This leads to an optimization problem that can be formulated as following

In practice, due to limitations in accuracy caused by manufacturing tolerances, flight disturbances, inaccurate measurements, and other factors, it is not necessary to obtain

where
3. Methodology
The methodology developed in this paper comprises of two major tasks. The first task is to successfully train an ANN model called neural approximator model, which is defined by an mathematical notation

where
The block diagram of the overall methodology is illustrated in Figure 1 and the detailed design for each task is presented in the following sections.
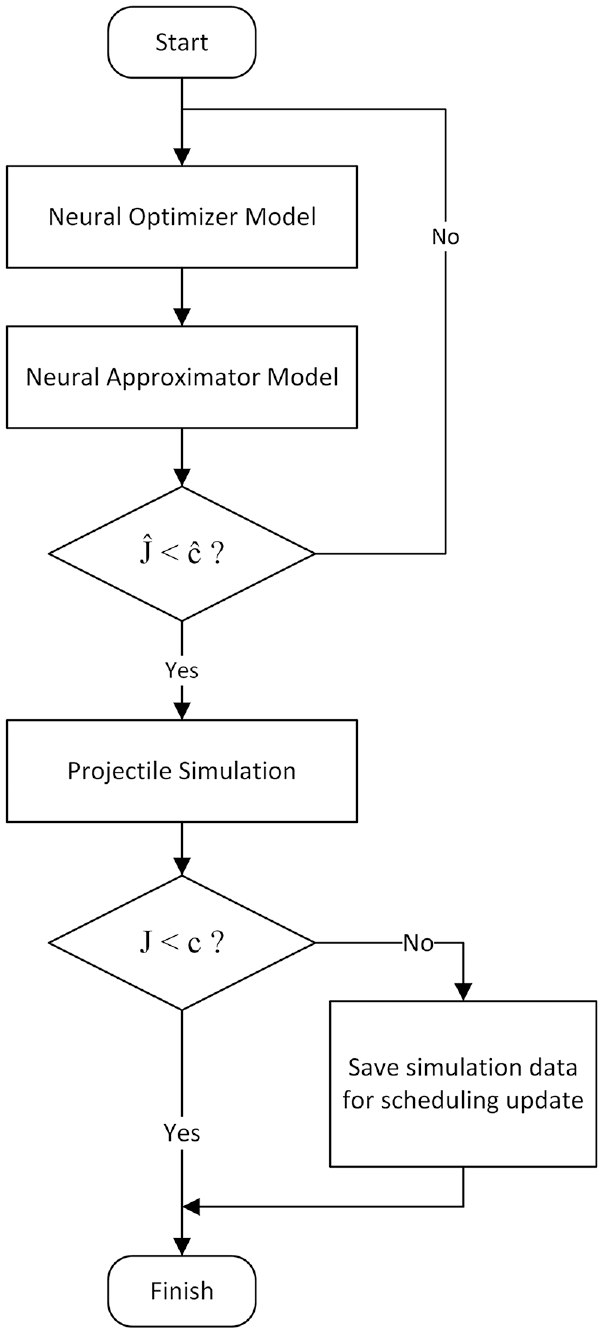
Block diagram of the proposed method.
3.1. Neural approximator model design
The input parameters of the neural approximator model include the launch angle and meteorological conditions, an output parameter of this model is the horizontal range. For study purposes, only the wind speed array
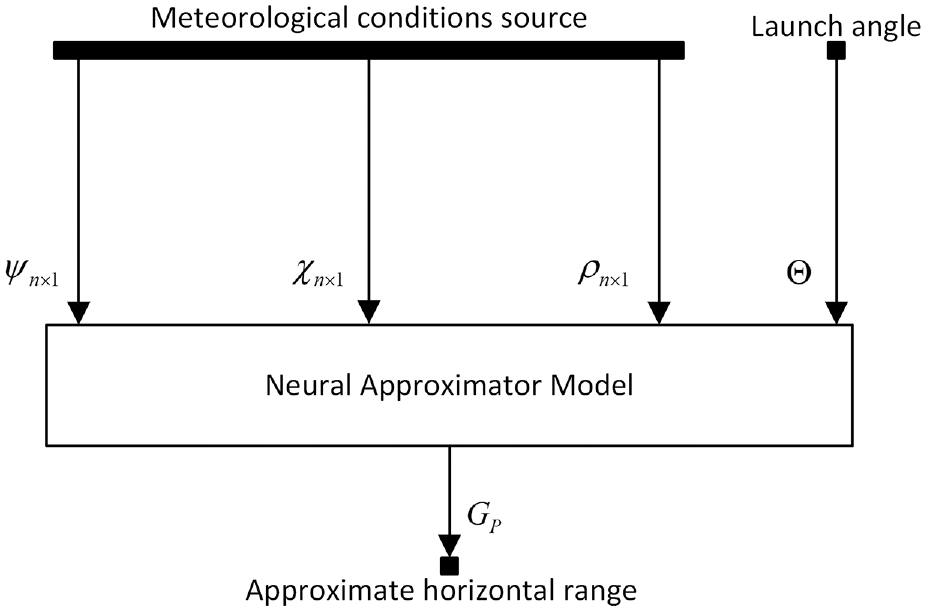
Neural approximator model.
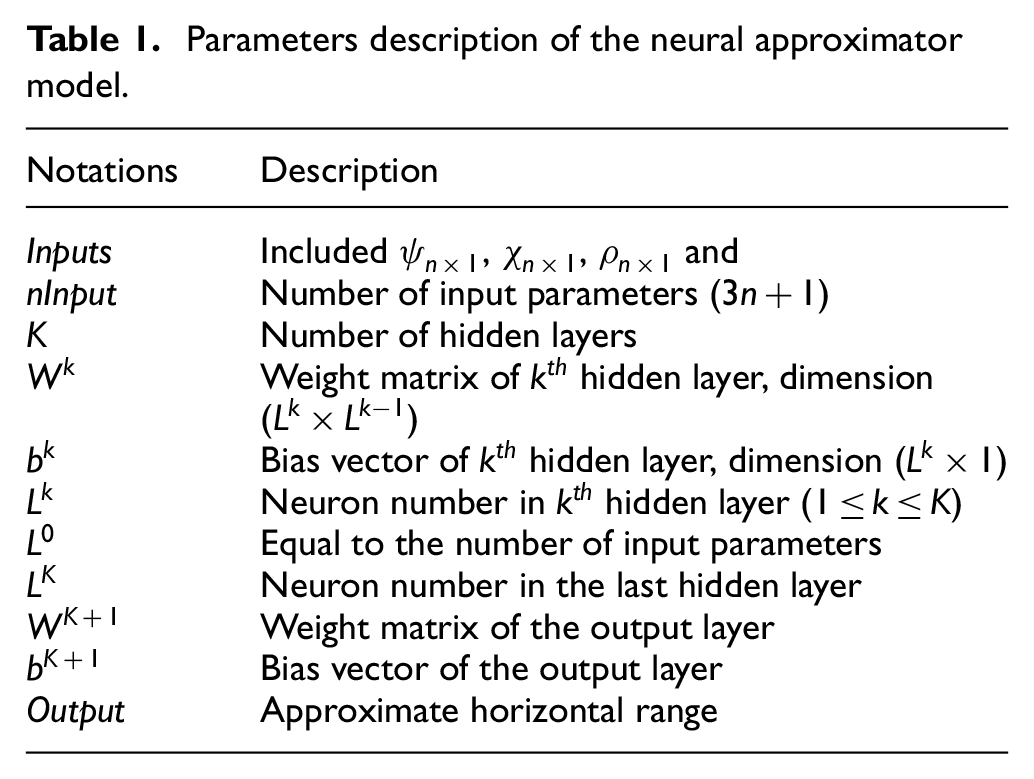
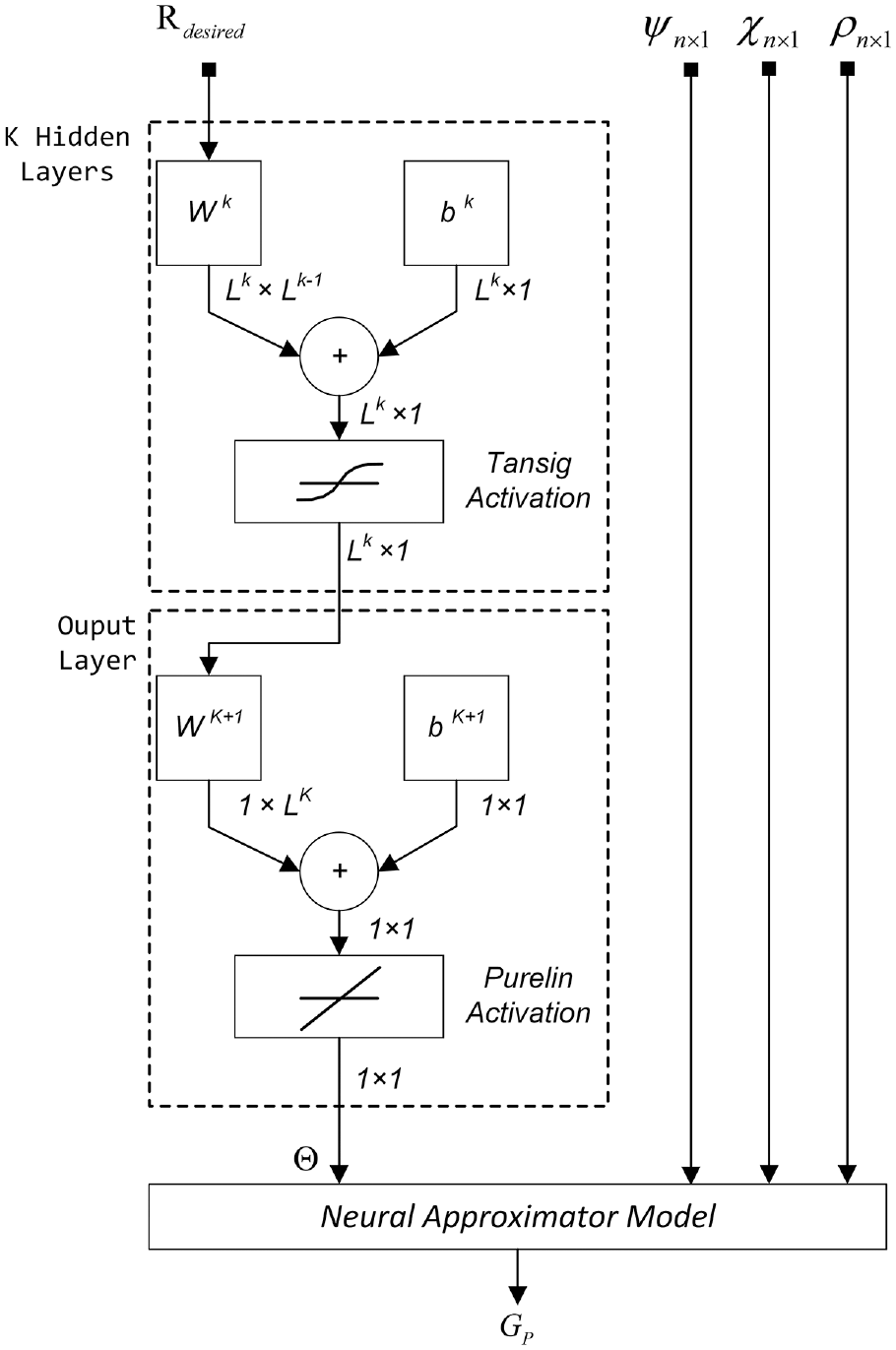
Because the problem of mapping between many input variables and an output variable is highly nonlinear, an instance of a well-known and widely used model of feedforward network 13 is chosen in this study. The topology of this model is presented in Figure 3 with corresponding parameters are described in Table 1. By determining the appropriate number of hidden layers, and the number of neurons in each hidden layer, the values of weights that link the neurons of consecutive layers and the biases at each neuron can be determined in a training process with the data generated from Monte Carlo simulations. Once the neural approximator model converges, the following mathematical representation for the horizontal range of the projectile simulation is obtained

where
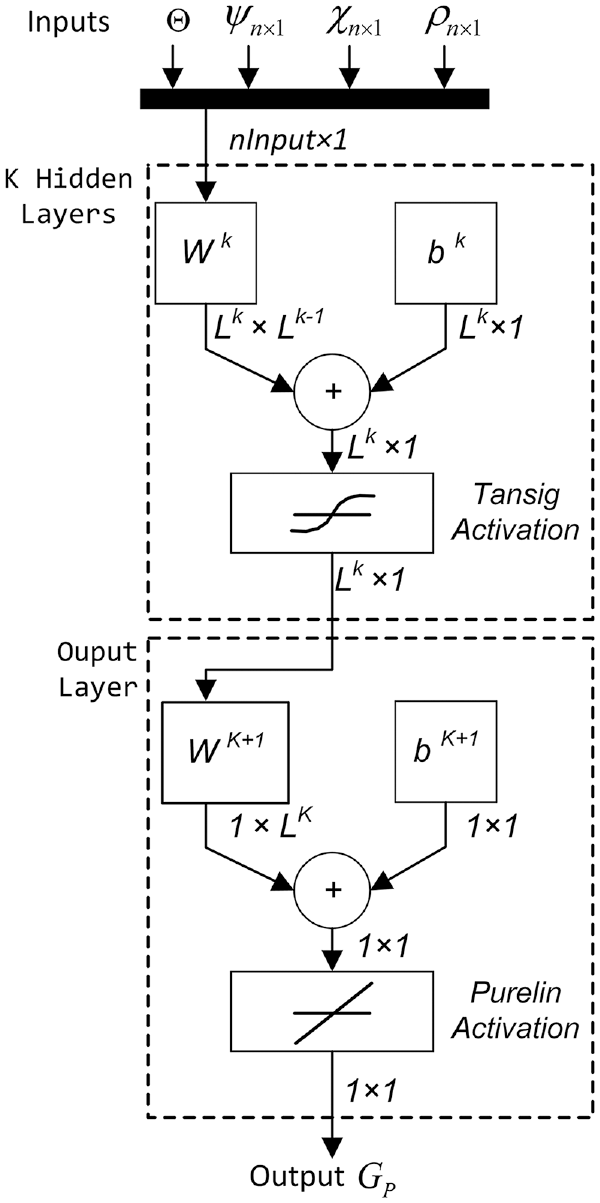
Topology of the neural approximator model.
Parameters description of the neural approximator model.
3.2. Neural optimizer model design
The neural optimizer architecture in this study is also selected to be a feedforward network,
13
structured similarly to that described in Figure 3 with changes of the input and output parameters. Specifically, the input parameter is the desired horizontal range
Neural optimizer model design.
The problem becomes determining the number of hidden layers as well as the number of neurons in each layer of the neural optimizer such that the objective function


By applying the chain rule of differentiation, the derivatives of the objective function with respect to each weight and bias are obtained, as defined in Equations (9) and (10), respectively


where

It is noted that when the neural approximator model was successfully trained then its mathematical representation
3.3. Overall convergence
The convergence of the overall methodology is guaranteed by the following theorem.

Substituting the expression

Note that the convergence of the auxiliary optimization problem (5) according to the gradient descent showed by Equation (7–11) does not need to be proven again because it has been discussed in many other articles,15–17 then

It is easy to see that the objective function

or

By combining Equations (15) and (16), the final condition that satisfies both is obtained as follows

The theorem is thus proved.
4. Results and discussion
4.1. Data Set
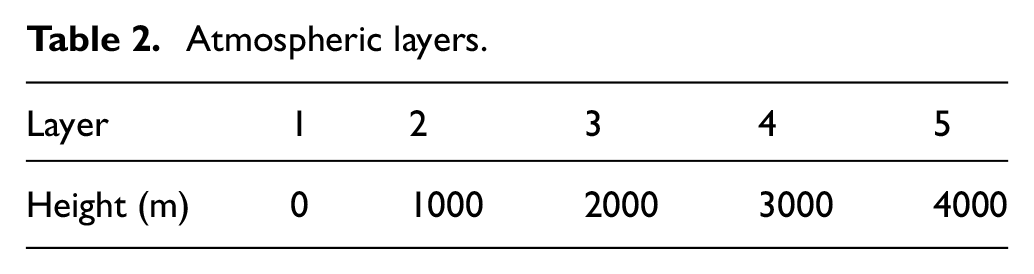
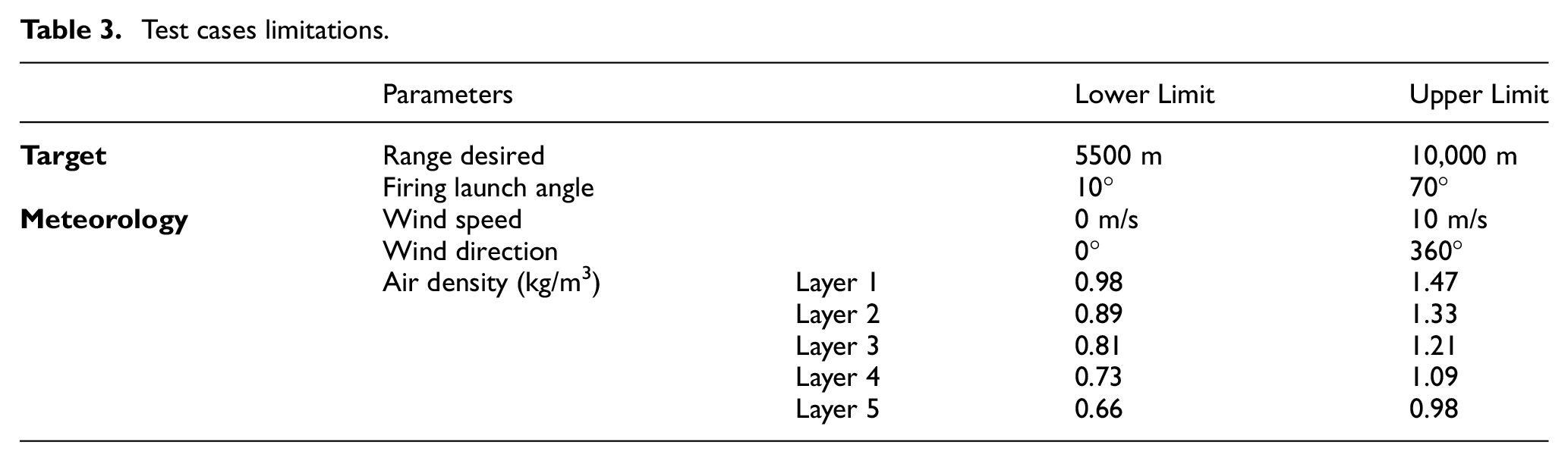
In this study, the parameters of the projectile are chosen as the following for one of the most commonly used artillery projectile 155 mm M107. 18 Table 2 presents the specific atmospheric layers considered in this study. At each layer, the wind speed range is from 0 m/s to 10 m/s and the wind direction is limited to the range of 0°to 360°, with differences between consecutive layers not exceeding 2 m/s and 10°, respectively. The air density at each layer varies by no more than 20% from the standard air density (U.S. Standard Atmosphere Air https://www.engineeringtoolbox.com/standard-atmosphere-d_604.html). Finally, the launch angle is randomly generated from the typical range of 10°and 70°, corresponding to a horizontal range between 5500 and 10,000 m. Table 3 summarizes the conditions for data generation.
Atmospheric layers.
Test cases limitations.
80% of the data are randomly selected for training the neural approximator model, while the remaining 20% was used to validate this model and evaluate the overall proposed method for comparison with other algorithms.
4.2. Baselines and evaluation metrics
To evaluate the effectiveness of the proposed method, a comparative analysis against several established competing methods is conducted, including conventional iterative methods and advanced iterative methods which use the Newton–Raphson technique:
Iterative incremental search: 6 is an iterative method, starting with the launch angle set to the lower bound, incrementally increasing by a fixed interval until the trajectory range surpasses the target range. Subsequently, the interval size is refined, and adjustments to the launch angle are made until the trajectory range falls below the target range. This iterative process continues until the stopping criterion is reached.
Iterative bisection: 6 is an iterative method similar to incremental search, with the key difference being that the interval size is reduced by half after each iteration.
Newton–Raphson5,19: is an iterative technique for finding solutions to a nonlinear equation by using a linear approximation of the function and its derivative.
Secant: 7 is a derivative-free variant of the Newton–Raphson method. It uses two nearby values to approximate the derivative and approach the solution.
Newton–Raphson offline: 6 is a variant of the Newton–Raphson method where derivatives and related calculations are precomputed and stored for future use.
Newton–Rapshon offline + secant: 6 is a hybrid algorithm of Newton–Raphson offline and secant method.
It should be emphasized that the computational time of the above algorithms is largely influenced by the simulation time of the projectile’s model and the resource configuration used for the computation. Therefore, to ensure objectivity, the number of projectile simulations as the first criterion will be used for evaluating the computational time of the algorithms. The maximum threshold for the number of projectile simulations is set to 20 and any cases exceeding this threshold will be terminated and considered as a failure. Then, the second criterion is defined as the convergence ratio which is formulated in Equation (18)

where
The miss distance 10 m is chosen as the stopping criterion for all algorithms. Therefore, the convergence coefficients used for our proposed method in Equations (4) and (5) are chosen as follows:

4.3. Comparison and analysis
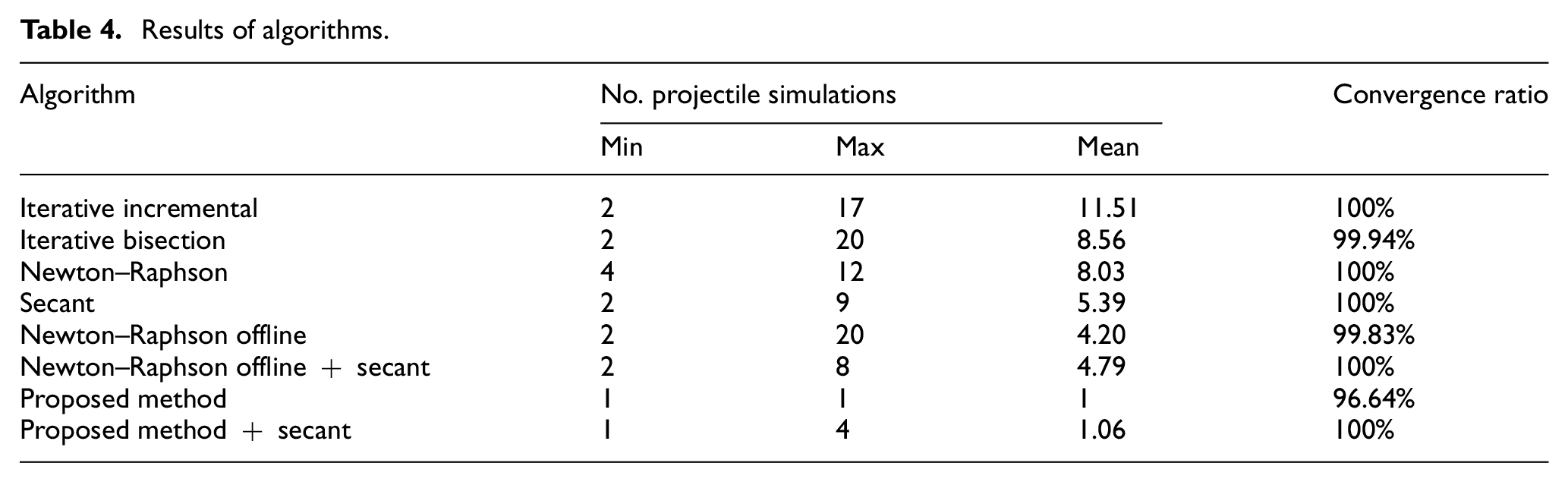
The experimental results on a test set of 6500 samples provide a comparative overview shown in Table 4 and Figures 5, 6, 7. Specifically, Table 4 presents the statistical results of all methods, Figures 5 and 7 show the distribution of projectile simulations through histogram figures, and Figure 6 shows the error distance distribution of the neural approximator model on the training set and test set. Based on these results, several observations are made:
The iterative incremental search algorithm and the iterative bisection algorithm are quite simple, so it is easy to implement. Although both algorithms have high convergence ratios (100% and 99.94%, respectively), they require a large number of projectile simulations.
The methods utilizing Newton–Raphson technique and its variants have significantly reduced the number of projectile simulations compared to the previous two methods because the launch angle is updated based on a linear approximation of the objective function and its derivative, facilitating faster convergence. However, the number of projectile simulations remains relatively high due to the random initialization of the initial launch angle, which leads to slower convergence.
The proposed method has markedly addressed the performance issues of previous methods. This method achieves a 96.64% convergence ratio with only one projectile simulation.
Figure 6 illustrates the distribution of the error distance in both the training set and test set. According to the proven Theorem 1, the proposed method will converge with a 100% convergence ratio if Equation (19) is satisfied. However, the error distance of the test set shown in Figure 6 do not fully meet this condition, leading to a convergence ratio of the proposed method at only 96.64%. To increase this ratio, the training set can be augmented with additional data and continue training the neural approximator model. This approach is expected to ensure that this model will satisfy Equation (19) when validate on the test set.
For cases where the proposed method produces the failure result, the secant algorithm 5 was integrated after the proposed method finished. Accordingly, the great results are obtained with a 100% convergence ratio and a maximum of only 4 projectile simulations with the distribution of the number of projectile simulations detailed in Figure 7.
Results of algorithms.
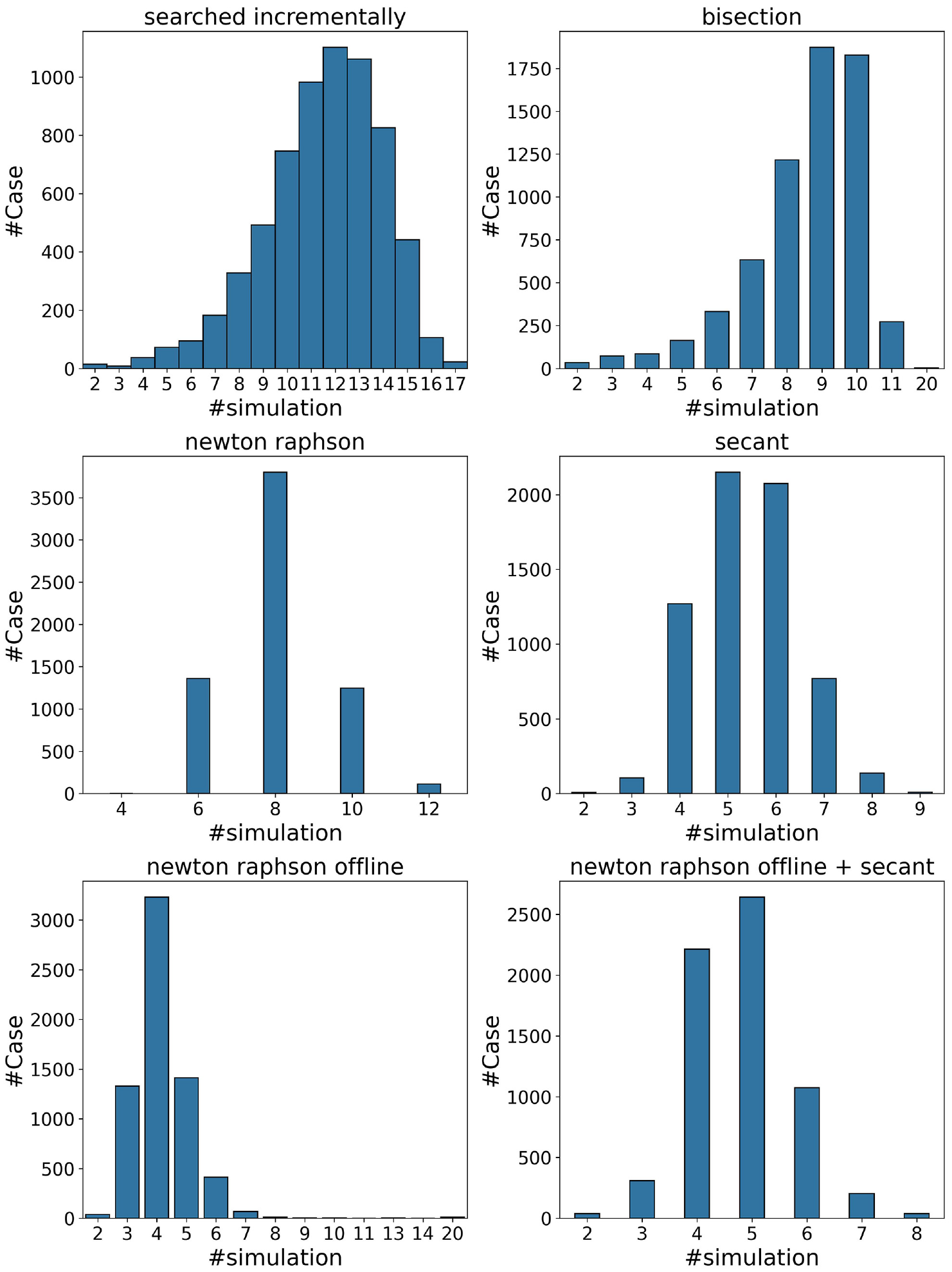
Histogram of results.
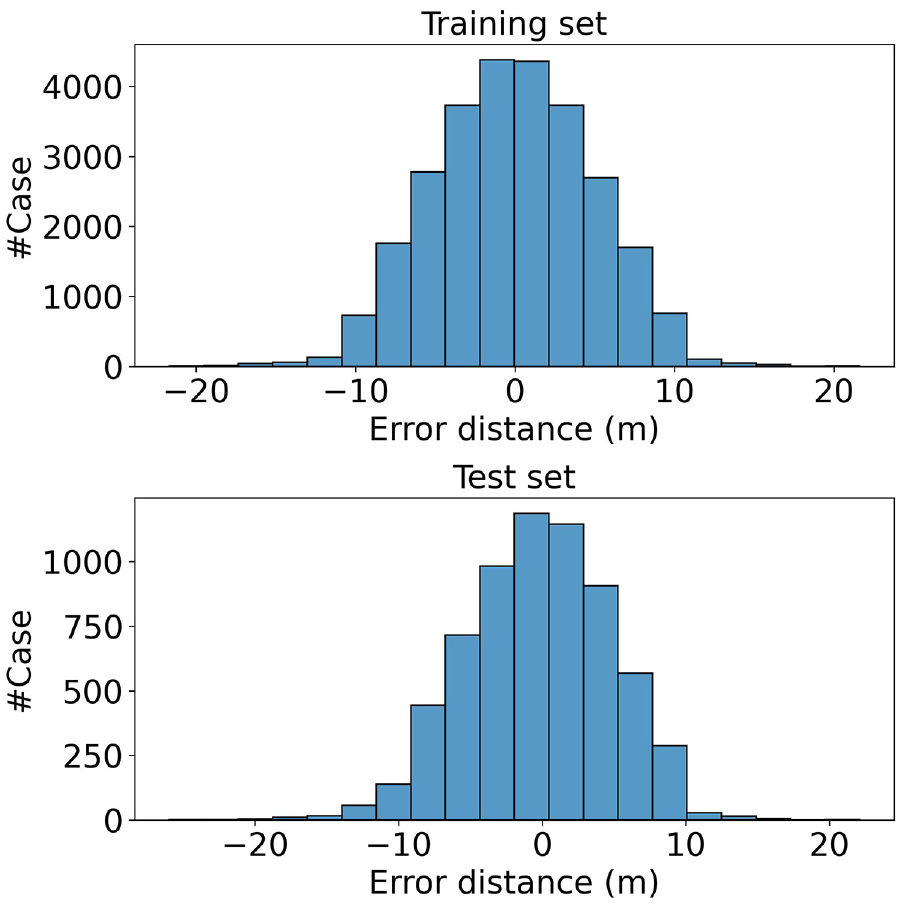
Distribution of the error distance.
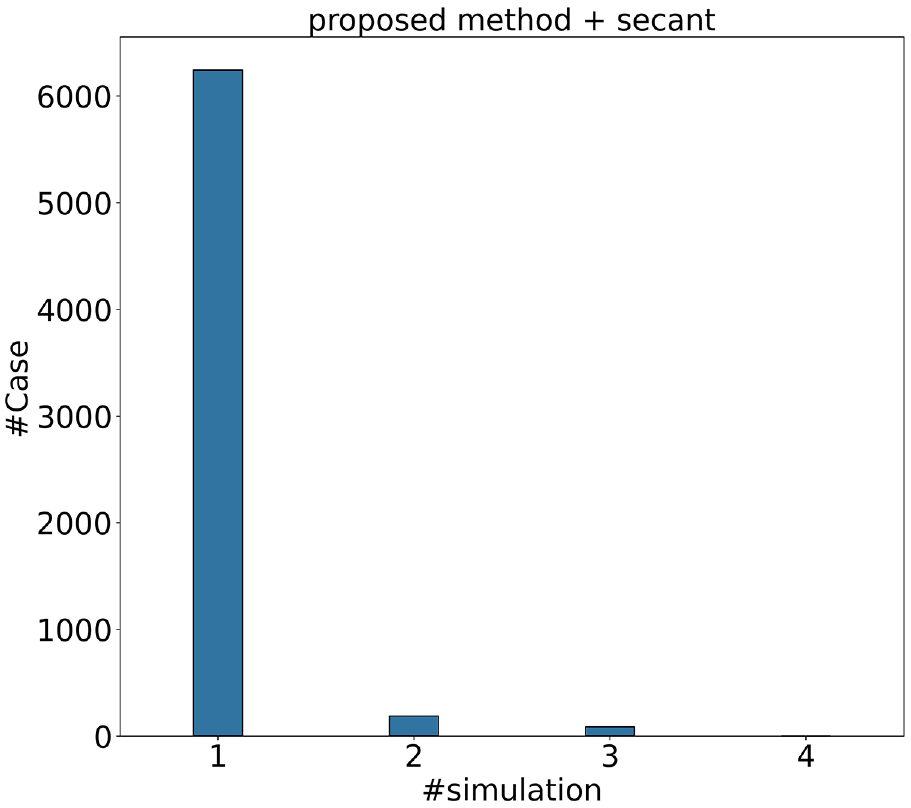
Histogram of results for the proposed method combined with the secant method.
5. Conclusion
In this paper, a fast method for optimal projectile trajectory is presented to deal with different meteorological conditions based on two ANN models. First, an ANN was successfully trained to produce a data-driven approximator of the implicit relationship between the launch angle, meteorological conditions and the corresponding horizontal range. After that, another ANN was built to solve the optimization problem based on the first ANN. The convergence of this method is mathematically proven, and it depends on the performance of the first trained ANN. The validity of the proposed method is verified through the 155 mm M107 artillery projectile model with 6500 test cases. The simulation results show that the proposed method gives the high convergence ratio with only one trajectory simulation. In addition, employing the proposed method as an initializer for the secant algorithm achieves a 100% convergence ratio while requiring a fewer number of the projectile simulations compared to other existing algorithms.
Footnotes
Appendix
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.