
Abstract
Enhancing the technological autonomy, controllability, and intelligence of manipulator robots can enable companies to achieve their increasing production requirements. The demand for fault-tolerant control (FTC) research is increasingly realized in manipulator robots. This work describes the design and assessment of a Fractional-Order Sliding Mode Controller (FOSMC) for precise trajectory tracking of a PUMA560 robotic manipulator. The proposed control strategy is validated using a reduced-order three-degree-of-freedom (DOF) model and considering only the first three joints. The traditional Sliding Mode Control (SMC) is first implemented on a reference model in order to develop a performance baseline. Despite having sufficient robustness, SMC produces chattering and increases tracking inaccuracy due to its high-frequency switching. The authors overcome these constraints by employing a fractional-order sliding manifold, which enhances the dynamic responsiveness and smoothness of the control action. To improve robustness against time-varying disturbances and nonlinear uncertainty, the suggested FOSMC design includes fractional derivative filtering, equivalent control compensation, and a saturation-based switching function. Further results show that the FOSMC works better with additional disturbances and actuator faults. The work shows that the high-precision and fault-rejection capabilities of robotic manipulators can be successfully replaced by fractional-order control.
Keywords
Introduction
Robotic manipulators can move objects from one place to another and are quickly replacing conventional manual labor with the advent of smart manufacturing. 1 They are employed in a variety of applications, as shown in Figure 1. Automated manufacturing has a clear separation of labor at every stage and closely working robots. 2 But these robots may be error-prone and faulty, hence lowering productivity, raising maintenance costs, and posing safety risks.3,4 Any accident can happen if, for instance, a technician or engineer moves into the robot’s operating area when it is carrying out such tasks. 5 A worker who was checking the sensor was recently killed and crushed by a robot at a South Korean vegetable packing facility. 6

Major applications of robotic manipulators.
The need for fault diagnostics research is increasingly realized in manipulator robots. 7 Production efficiency and product quality are highly influenced by the working conditions of manipulator robots, which are essential tools for modern manufacturing. 8 By using manipulator robot fault diagnostics, companies can extend the time between overhauls and maintenance. Enhancing the technological autonomy, controllability, and intelligence of manipulator robots can enable companies to achieve their increasing production requirements.9,10 Manipulator robots often work in harsh and intricate environments. Safety problems may be avoided by sensing problems, keeping track of the working situation, and warning staff of unusual conditions on time. 11 Lee et al. 12 also add that when all the possible risks are considered, organizational, communication, psychological, cultural, and systematic factors should also be considered.
In manipulator robot systems, employment of advanced fault detection algorithms enhances system performance 13 and reliability. 14 These techniques enable the fault detection process. 15 By attempting to combat difficulties, many robot manufacturers have invested their time and money in research and development. 16 For instance, famous robot manufacturers like FANUC, KUKA, and ABB offer advanced technology and solutions regarding the identification of problems with manipulator robots. 17 Detection of faults in manipulator robots has also been researched by some research institutes and universities. 18 The focus of the major references is mainly on possible actuator faults in heavy-duty manipulator robot joints under operation. 19 They discuss an intelligent fault-detection system with a data-driven approach that injects multiple fault types into the heavy-load manipulator robot’s dynamics model, making the samples imbalanced.
Passive fault-tolerant control systems (PFTCS)
PFTCS continue to operate effectively without the need for explicit fault detection or controller reconfiguration when any external disturbances and uncertainties occur. 20 PFTCS focuses on a robust control architecture to ensure that it is effective for a set of known failure scenarios. In a study by Zuñiga et al., 21 a passive FTC strategy was applied to a two-DOF robotic helicopter using structural redundancy and a robust state-feedback architecture. Freddi et al. 22 presented that robotic manipulators can keep track of trajectories accurately even when some actuator faults occur. The PFTCS utilizes robust control techniques to prevent certain faults from affecting the control loop system. A PFTC method with a three-block controller was devised in 23 to get good trajectory tracking in the case of faults. Despite the developments, the majority of solutions still rely on fault estimation or adaptation approaches, which may be challenging for real-time industrial controllers to execute. PFTCS, on the other hand, provides a more straightforward method by maintaining acceptable performance without specifically identifying the issue. Nevertheless, a PFTCS framework for robotic manipulators still lacks complete integration of FOSMC.
Literature review
A robust nonlinear control method that helps robots keep working despite faults is sliding mode control (SMC). 24 It does this by sliding system states to a specified surface and regulating nonlinearities and external disturbances while the robot is operating. The well-designed SMC variants can even mitigate chattering, a known consequence of SMC design. 25
Classical SMC is widely famous in the robotics field because of its improved robustness against external uncertainties and actuator faults. For robot manipulators without joint-velocity data, Van et al.’s 26 robust FD-FTC technique employs a sliding-mode-type robust controller to continue tracking even if actuators and other components fail or any uncertainty occurs. 27 For FD and FTC in robotic manipulators, a super-twisting sliding-mode observer of third order is a better observer/controller than conventional active FTC techniques. 25 Bui et al. 28 demonstrated that a well-designed SMC law may sustain tracking in the presence of nonlinearities and inefficient actuators. A critic-only dynamic programming framework and optimal sliding-mode FTC for multi-robotic manipulators were incorporated in recent work by Zhang et al. 29 ; despite actuator flaws and disturbances, they were able to achieve the necessary performance. These SMC techniques perform better than traditional SMC in terms of actuator protection and control effort smoothness when high precision or cooperative manipulators are needed.
Intelligent and adaptable SMC systems that include learning and parametric adaptation are able to handle the complex failure patterns and time-varying uncertainty of manipulators. Van and Ge’s 27 adaptive fuzzy integral SMC with a disturbance observer is a prime example. 30 Ahmed et al. 31 developed an adaptive fractional-order SMC for nonlinear uncertain manipulators based on fixed-time stability theory. A fast terminal sliding surface ensures quick convergence in the case of uncertainties or actuator failures. 32 Ahmed et al. 33 created a fractional-order non-singular FTSMC-based FTC for robotic manipulators. For less efficient robot manipulators, Le et al. 34 created an active FTC technique using synchronous fast terminal SMC and an extended state observer. These FTC designs based on TSMC or FTSMC are perfect for high-speed, high-precision manipulators, but they require careful design to prevent singularities and excessive control effort. In a recent work, 35 a fixed-time fractional-order super-twisting SMC based on barrier functions was developed to improve robustness against actuator defects and uncertainties. Disturbance observers are not necessary for this controller. An adaptive fractional-order PID controller based on recursive least squares was developed in 36 to improve trajectory tracking accuracy and stability for manipulators working in the event of nonlinear uncertainty. Using a robust, precise differentiator, the fractional-order fixed-time nonsingular terminal SMC system in 37 showed better tracking performance and faster convergence under disturbances. In order to accelerate robotic system convergence and enable more accurate trajectory tracking, recent work in 38 integrated fractional-order sliding mode control (FOSMC) with intelligent optimization techniques. A dependable FOSMC method that takes uncertainty and time-varying disturbances into consideration was introduced by. 39 Compared to conventional methods, it showed improved tracking performance and reduced chattering. Fractional-order adaptive SMC is one technique employed by space robots to manage dynamic uncertainty and disturbances in low-gravity conditions. 40
Hybrid fractional-order controllers are suggested for spherical joint manipulators and flexible robotic arms because of their better performance than integer-order controls for handling uncertainties and nonlinearities. 41 The useful benefits of FOSMC have been further confirmed by experimental research. When used in real-time, these controllers exhibit reduced power consumption and more sophisticated control actions. 42 By adding non-integer order derivatives to the sliding surface or control law, FOSMC, an extension of SMC, improves smoothness and robustness trade-offs, increases tuning freedom, and better manages complex manipulator dynamics.43,44 Fractional-order integral FTSMC is another technique that has been applied to dual-arm robots. 45
Although FOSMC has theoretical advantages, its practical use in robotic systems is currently restricted, especially in dynamic disturbances and ideal operating environments with external perturbations and fast parameter changes. Robotic manipulators encounter difficulties in enhancing their robustness and stability, such as in the case of intricate frictional interactions inside joints, external disturbances, and system uncertainties.
General robotic dynamic model
The three-DOF robotic manipulator is described in joint space by the generalized coordinate vector and with corresponding joint velocities and accelerations as:

The control input vector is the vector of joint torques and given as:

The kinetic energy (T(q,


Where
Applying Euler–Lagrange equation for each generalized coordinate

Hence, the gravity vector can be written as:

where each

Despite recent developments, several challenges with FTC for robotic manipulators still exist: The majority of passive FTC techniques now in use rely on integer order SMC, which has substantial chattering and poor steady-state accuracy. Unlike most published controllers that presume well-known robot dynamics, real manipulators face unmodeled friction and parameter uncertainty. There are currently no complete Simulink frameworks for active disturbances on joint torques, which makes repeatability challenging. Therefore, a robust controller that maintains stability and tracking precision is still required in the face of shocks and dynamic uncertainty.
Current FTC techniques for robotic manipulators handle most external disturbances and actuator failures, but in complex fault scenarios, this leads to reduced tracking precision and restricted reliability. Therefore, to provide precise, low-chattering tracking under actuator faults and uncertainties, a passive FTC technique that combines fractional-order control with a better sliding function is required.
The three-DOF reduced-order PUMA560 robotic manipulator is studied to use a PFTCS method based on FOSMC. The fundamental purpose is to improve durability and reduce chattering, in contrast to conventional SMC. Assessing the controller in the face of disruptions and dynamic uncertainty does not necessitate a fault reconfiguration approach.
Novel contribution and significance statement
The primary contributions made in this study are as follows:
A FOSMC controller is proposed to improve tracking accuracy and robustness for robotic manipulators.
A comprehensive robustness evaluation is carried out by integrating disturbance scenarios, also abrupt, intermittent, and incipient fault situations.
A saturation-based discontinuous control approach is used to minimize chattering and maintain stability. Using RMSE-based performance analysis, the authors evaluate the effectiveness of the proposed controller in several operational scenarios.
The research work demonstrates that FOSMC can withstand faults and uncertainty brought on by disturbances and actuator faults.
The remaining sections of the paper are organized as follows: Section 2 details the mathematical portion and the formulation of the FOSMC controller. It also describes the complete methodology of the proposed work. Section 3 provides the simulation setup, trajectory generation, and discusses the results and related discussion of the proposed study in detail. Section 4 provides a brief comparison of this study with some other similar works in the literature. Section 5 summarizes the study and presents a conclusion, also suggesting future research directions, including extension to other actuator fault scenarios and hardware implementation.
Research methodology
This section describes the controller architecture and modeling methodology for passive FTC of the three-DOF reduced-order PUMA560 robotic manipulator under healthy conditions and in the case of uncertainties or faults. The method strictly adheres to the passive control concept and does not include reconfiguring controllers, identifying errors, or calculating parameters. The controller implemented includes robustness and is FOSMC. The system flow chart and closed-loop block diagram in Figures 2 and 3 elaborate on the research methodology followed.
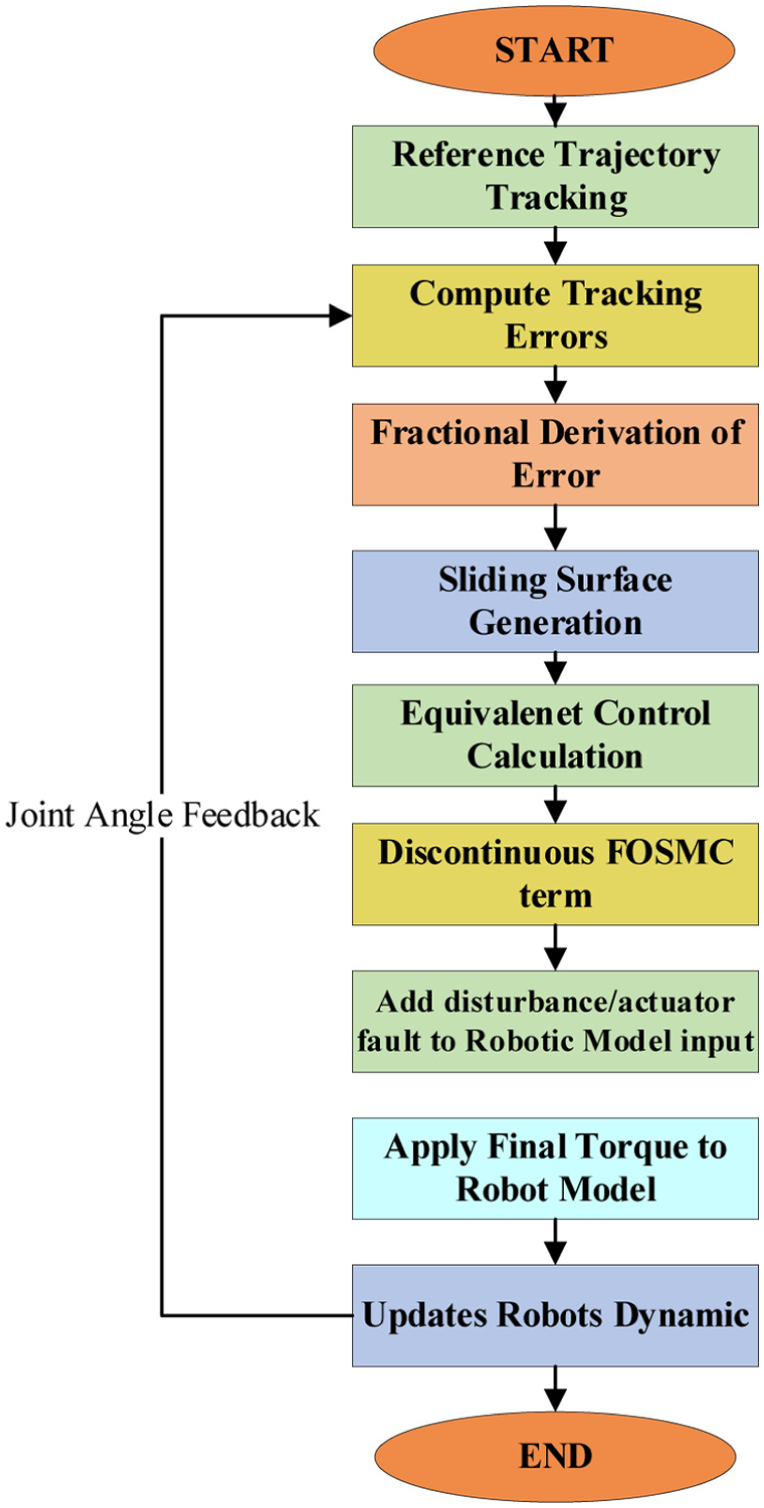
Flowchart of methodology.

Block diagram of the system.
Robot dynamic model
The three-DOF reduced-order PUMA560 manipulator satisfies the famous rigid-body dynamic equation. This configuration-dependent model accounts for all nonlinearities involving link masses, inertial parameters, and geometric couplings. 47 The manipulator dynamics can be expressed in the standard form as:

Where M(q) is the mass matrix, C(q,
A simplified three-DOF model that considers the first three joints is displayed. The conventional Lagrange approach is used to derive the manipulator dynamics. In this model, inertia terms are explained in a compact form by grouping constant parameters. The primary dynamics are considered to be controlled by the first three joints, with higher-order coupling effects being insignificant. For the first three joints, the inertia matrix appears in an organized form. The elements (











The elements of gravity torque are given as:



For this work, Armstrong et al’s
48
original six-DOF PUMA560 dynamic matrices in the long symbolic expressions (inertia, Coriolis, and centrifugal) are not written because this experiment only studies the first three joints. Like its six-DOF version, the three-DOF reduced-order PUMA560 robot’s configuration space formulation has a simple structure. The full six-DOF PUMA560 dynamic model is used in simulation, with the last three joints constrained. This type prevents the last three joints from moving (
FOSMC controller design
The joint-space tracking error is defined as:

with corresponding derivatives:

The proposed fractional order sliding surface for joint i = 1,2,3, element-wise, can be written as:

The sliding motion is achieved when:

which implies e(t),
The derivative of the sliding surface is:

Using dynamic and ideal sliding behavior, the equivalent torque is given by:

The discontinuous (robust) switching part is chosen as:

The discontinuous control component uses a saturation-based switching function to ensure it functions and reduces chattering. More specifically, “sat” gives the switching function, and ϕ is the boundary layer thickness. The saturation function provides a continuous approximation within a predetermined boundary layer; it is preferred over other functions for control actions that are smoother and more robust against limited disturbances and actuator faults. In practical applications, this formulation improves the controller’s overall performance and ensures steady sliding motion.
The total control law for full FOSMC is given by:

Although the control law for each joint is applied independently, system’s overall dynamics remain interconnected. The closed-loop system is expressed in vector form for stability analysis.


Its derivative can be written as:

Using bounds on ||

Where
Then, there exists a constant

This guarantees sliding-variable convergence despite bounded disturbances.
Both the coupled Coriolis-centrifugal structure and the positive definite inertia matrix employed in this study are derived from the traditional Euler-Lagrange rigid-body dynamic formulation. The classical skew-symmetry property is also satisfied by it. All other parameters, such as external disturbances, model errors, and known and constant actuator torque limitations, are assumed to be constrained at the joint-torque level. It is anticipated that the joint velocities will be measured or closely approximated by discrete differentiation, and that the trajectories will be smooth and limited to provide well-characterized tracking error dynamics. If the sliding surface uses a fractional derivative, the discrete Oustaloup filter should provide a reasonable estimate.
Results and discussion
In this part, numerical findings from simulations of the reduced-order three-DOF PUMA560 robotic manipulator model are also compared with those of the baseline SMC and the proposed FOSMC. The reference/base Simulink model has been obtained from, 49 and it implements a standard Sliding Mode Controller. The robotic system, the blocks for generating tracking errors, the application of the SMC law, and the desired trajectory are all part of the model’s structure. The parameters of the controller in the base model are defined as: first, second, and third surface constant values are equal to 10, and all three joints’ discontinuous control constants are set to 0.2. Figure 4 demonstrates the corresponding joint angle tracking performance with desired trajectories given as:


Tracking joint position with SMC.
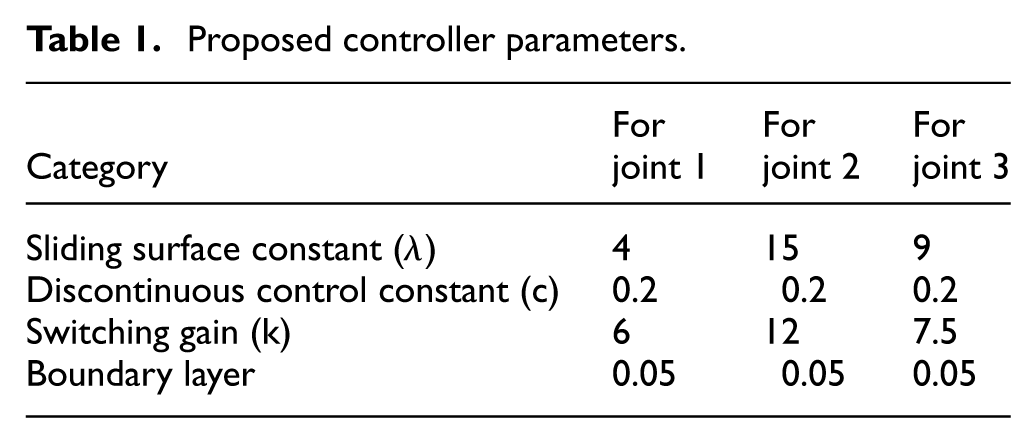
The complete control architecture of the proposed FOSMC is shown in Figure 5. The system consists of three independent FOSMC controllers, one for each joint. To offer control torques, these controllers are given the desired and actual joint positions. The disturbance and actuator fault signals are injected into the control input via a multiport switching mechanism, allowing for a variety of operating scenarios, including healthy, disturbance-only, and fault scenarios. The generator blocks for these signals are shown in Figure 6. The robotic manipulator’s dynamics are described by a three-DOF PUMA block, and the controller receives the joint outputs generated for closed-loop operation. The FOSMC controller parameters are given in Table 1.

Overall Simulink model of the FOSMC-controlled three-DOF PUMA manipulator.

Disturbance and actuator fault generation blocks.
Proposed controller parameters.
Case 1: Healthy system
The joint tracking with the suggested FOSMC in an uncertainty/disturbance-free setting is depicted in Figure 7. The tracking error convergence to zero is shown in Figure 8. The results include smoother joint motion and more convergence in the desired direction.

Tracking joint position (rad) with FOSMC (without fault).

Case 1–tracking errors (rad).
The tracking performance under nominal conditions is quantitatively compared in Table 2, where the proposed FOSMC demonstrates improved accuracy over the conventional SMC approach. The following are definitions of root mean square error (RMSE) and average normalized RMSE (NRMSE), which are used to measure tracking performance:

where

RMSE comparison between SMC and proposed FOSMC under healthy conditions.

The average NRMSE values are calculated using:

where

NRMSE gives a performance statistic that is independent of scale, whereas RMSE gives absolute tracking error.
The robustness of the proposed controller is also evaluated with the addition of disturbance terms and assuming multiple fault scenarios, including abrupt, intermittent, and incipient faults, as described below:
Case 2: Disturbance addition
To test the robustness of the suggested approach, nonlinear state-dependent frictional force and disturbance terms similar to those in another study’s 50 structure are incorporated into the model. The applied disturbances are defined as:



These disturbance signals are added smoothly in the torque input lines of the robotic model. The disturbance model includes both velocity-dependent and position-dependent nonlinear components to account for real external uncertainty. The joint angle responses to disturbances are displayed in Figure 9. The proposed FOSMC keeps tracking performance constant to lessen the effect of disturbances, as shown in Table 3. The system remains well within allowed tracking limits even when Joints 1 and 3 undergo mild oscillations, indicating the robustness of the controller, shown by tracking errors in Figure 10.

Tracking joint position (rad) with case 2.
RMSE values for cases 2 and 3.


Tracking errors (rad)–case 2.
Case 3: Disturbance + abrupt fault
In addition to the external disturbance/uncertainties model from case 2, an abrupt fault signal (





Table 3 demonstrates fault-tolerant performance for the proposed method and another work under case 2 and 3 fault conditions. The joint tracking performance for this case is shown in Figure 11. The table also includes values from other study. 50 This comparison is based on values provided in the literature and may vary slightly due to changes in system parameters and simulation settings.

Joint tracking (case 3).
Case 4: Intermittent fault
During an abrupt fault scenario, the fault signal is activated at a precise instant and stays active continually. To simulate intermittent actuator failures, switching signals are used to periodically activate and deactivate the fault. An intermittent fault is defined as:

Here,

The switching frequencies are applied as:

Thus, the intermittent fault components are expressed as:



Where

Joints tracking (in radians) with intermittent fault.
Case 5: Incipient fault
In the incipient fault scenario, the abrupt fault function is scaled by a time-varying exponential growth factor, resulting in a gradual increase in fault magnitude:

Where



Thus:



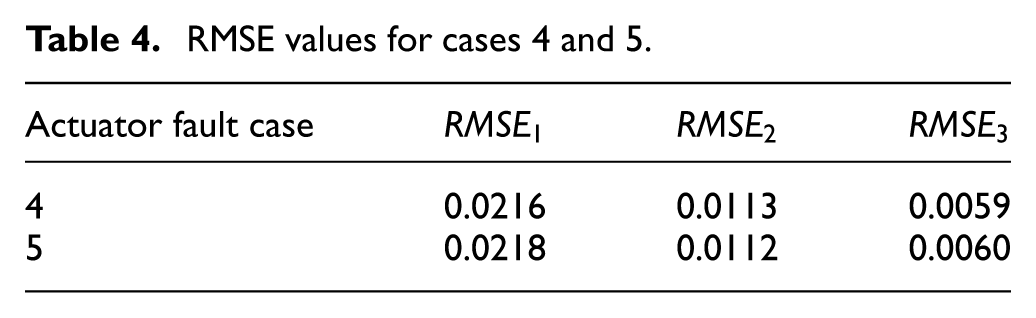
The exponential growth function ensures a smooth transition from healthy to faulty operation, capturing incipient fault behavior. The performance under more realistic fault scenarios, including intermittent and incipient faults, is summarized in Table 4. The tracking performance for this case is illustrated in Figure 13, where the actual joint trajectories closely follow the desired trajectories.
RMSE values for cases 4 and 5.

Joint position tracking (in radians) in the presence of an incipient fault.
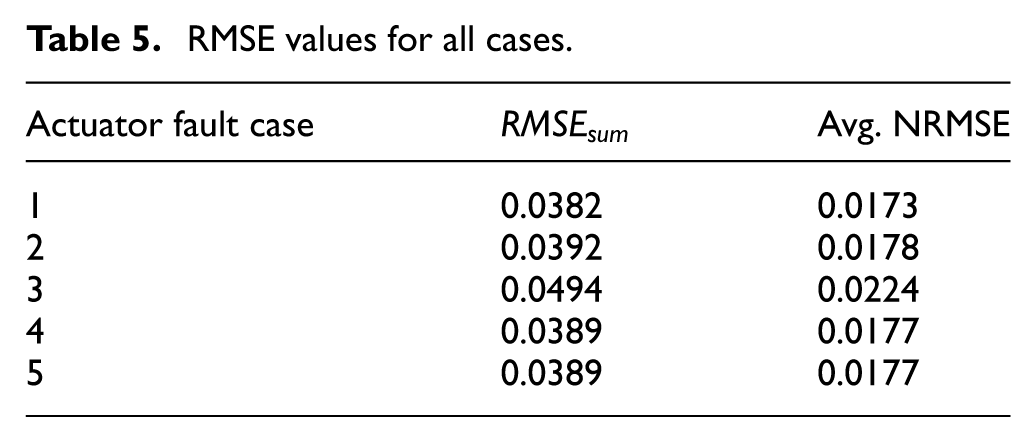
Table 5 provides an overall comparison across all operating conditions by summarizing the sum of RMSE and average NRMSE. The suggested controller consistently maintains robustness against both abrupt switching and gradually developing faults, as seen by the identical RMSE values for Cases 4 and 5. The overall results show that the error gradually increased while maintaining acceptable performance levels from the healthy case to the fault conditions.
RMSE values for all cases.
The suggested FOSMC controller is noticeably efficient, according to the performance data. Even if the baseline SMC can track trajectories, there is still perceptible chattering and larger RMS tracking errors, especially in joints with larger amplitudes. When nonlinear uncertainty and actuator faults are considered, the FOSMC exhibits improved resilience qualities, maintaining tracking performance with only a slight degradation. The RMSE values and the graphical responses to joint angles demonstrate this improvement; the suggested controller continuously performs better than the traditional SMC. Under all operational conditions, the proposed FOSMC uses the same control law and fixed parameters; it is not developed with explicit fault detection or controller reconfiguration. The system is tested by introducing the additive actuator faults, and despite these unknown disturbances, the controller manages stability and reasonable tracking. Instead of actively diagnosing and compensating for faults, this behavior demonstrates passive fault-tolerant control, in which the controller architecture inherently achieves robustness to faults. These results highlight the importance of fractional-order sliding dynamics in robotic control systems, especially those that need to be highly accurate and robust to external disturbances, frictional forces, model uncertainties, and actuator faults.
Comparison with other works
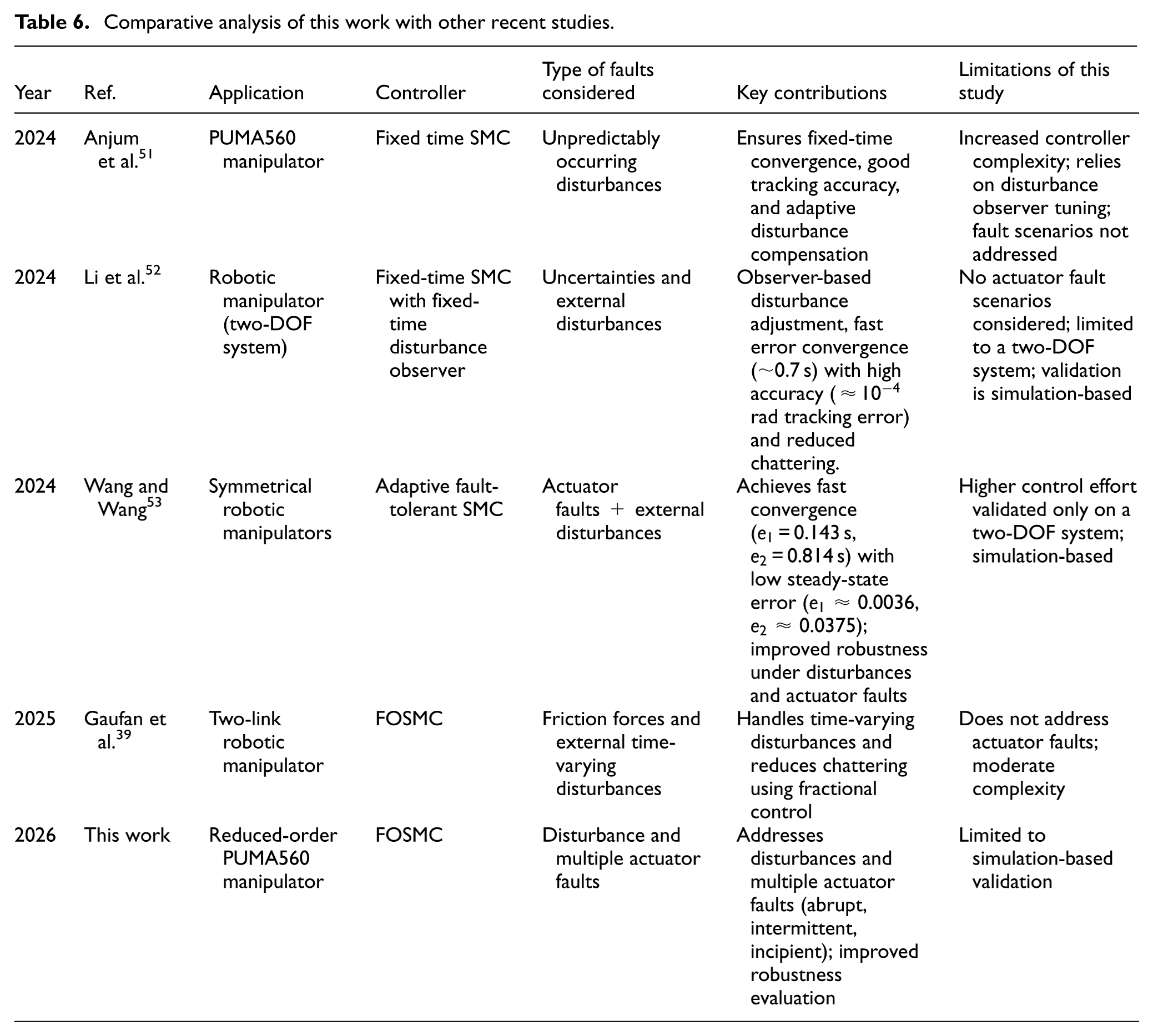
The proposed FOSMC achieves comparable disturbance rejection while maintaining an essential framework. To highlight the significance of the proposed approach, a qualitative comparison with earlier studies is given in Table 6, acknowledging their efforts, too. Numerous studies have been conducted on the dependability of SMC for robotic manipulators, although most of them have focused on model uncertainties and external disturbances rather than actuator failure situations. The current work offers a more comprehensive and useful evaluation approach by considering disturbances and other types of actuator failures. The Simulink architecture of the proposed method also enables it to be easily extended to real-world robotic applications and systems with more degrees of freedom.
Comparative analysis of this work with other recent studies.
Conclusion
In order to track the trajectory of the three-DOF reduced-order PUMA560 robotic manipulator, an FOSMC was developed and assessed in this study. The suggested FOSMC was constructed using fractional derivative filtering and an enhanced sliding manifold, based on a traditional SMC construction. The disturbances and different actuator faults were applied to the torque input to evaluate the controller. The RMS error analysis depicts that all joints’ performance improved to some extent, which should not be surprising given the inherent stability and smoothness of the fractional-order framework. The results show that complex robotic control tasks demanding accuracy, stability, and resilience to disruptions can be well-suited for FOSMC applications.
It should be noted that the proposed method is validated using a reduced-order three-DOF model of the PUMA560 manipulator. In future studies, the proposed control architecture can be extended to the whole six-DOF system, other manipulator models, and validated experimentally under actual actuator fault scenarios. The controller may be enhanced in the future to manage fault-tolerant scenarios, demonstrate the degradation of actuators, or apply learning-based control structures to apply data-driven adaptation.
Footnotes
Acknowledgements
The authors would like to thank colleagues for their suggestions to improve the paper quality.
Handling Editor: Sharmili Pandian
Ethical considerations
The authors adhere to the ethical considerations as deemed necessary.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by the Faculty Research Support Program (FRSG-2023) of FAST National University of Computer and Emerging Sciences.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
The data and supportive information are available within the article.
AI declaration statement
The Grammarly Professional Version tool was used to assist language refinement, grammar correction, and paraphrasing.