
Abstract
The fault features in the vibration signals of planetary gearboxes exhibit strong coupling and nonlinearity, significantly increasing the complexity of fault feature extraction and diagnosis. To address these issues, this work proposes a composite fault diagnosis method based on multi-parameter multi-channel fusion (MP-MCF). This method integrates fundamental characteristics that show distinct evolutionary trends as fault severity increases to create a new integrated fault feature metric called sample entropy root mean square (SE-Rms). By effectively improving the discriminatory quality of different fault properties, this metric makes it possible to identify composite defects with more reliability. Additionally, based on SE-Rms, a multi-parameter matrix is created and fed into a support vector machine (SVM). Concurrently, an comprehensive MP-MCF diagnostic framework is formed by introducing the multi-channel evidence fusion theory to re-diagnose misdiagnosed samples. The results of the experiment show that this method works effectively for diagnosing composite faults in planetary gearboxes with different structures. The diagnostic accuracy reached 96.6% after multi-channel fusion, confirming the efficacy of the proposed MP-MCF method and SE-Rms feature and offering useful guidance for the diagnosis of composite faults in gearbox systems.
Keywords
Introduction
Planetary gearboxes are widely employed in transmission systems across aerospace, metallurgy, chemical engineering, and other industries, making vibration monitoring and fault diagnosis essential. However, fault feature extraction is significantly complicated by the coupling of multi-fault vibration signals among components, mutual modulation across signal transmission paths, and interference from environmental noise.
Extraction of fault features from gearbox vibration signals has been researched in great depth. As an effective signal processing tool, time-frequency analysis techniques have demonstrated notable advantages in extracting sensitive defect features from non-stationary data 1 and provide better interpretability than deep learning techniques.2,3 The failure detection of rotating equipment has incorporated features that were first defined in other fields for non-stationary signals, with entropy metrics being particularly noteworthy.4,5 Thus, Wang et al. 6 described a technique based on identifying periodic impulse features and noise intensity in fault signals which employs the ratio of sample entropy to integrated kurtosis as a composite evaluation indicator. While this method allows for parameter-adaptive stepwise mode decomposition, it is still susceptible to noise and requires a comparatively high computing complexity for calculating sample entropy. In order to develop an adaptive termination criterion that reduces noise and extracts early bearing failure vibration data, Jin et al.7,8 employed entropy features. This was done to address the issue of early bearing failure features being weak and readily swamped by noise, which leads to low early bearing fault detection accuracy. Single-scale entropy cannot capture multidimensional failure information. 9 To address the aforementioned issues, Li et al. 10 proposed refined composite multiscale fuzzy entropy (RCMFE), an improved entropy method, because the entropy value varies greatly and the entropy characteristic is not defined in some time scales. Gao et al. 11 established a high diagnostic accuracy by using the RCMFE in conjunction with a neural network to diagnose bearing faults. For rolling bearing failure diagnosis, Huo et al. 12 provided adaptive multi-scale weighted permutation entropy (AMWPE) and integrated it with multi-class SVM, showcasing its resilience in a variety of noise scenarios. This research provides novel viewpoints on enhancing multi-scale entropy. Dimensionality reduction is necessary for multiscale entropy display, and averaging procedures may cause abrupt change information to be lost. 13 Ye 14 proposed an active entropy feature to solve these problems. This feature successfully captures fault feature information and achieves high accuracy in wheel failure diagnosis by mapping time series to three-dimensional vectors. According to research, creating feature metrics through the integration of multi-domain data enhances diagnostic performance. Existing research primarily concentrates on single fault identification, whereas studies addressing compound faults in planetary gearboxes remain limited. Inspired by the aforementioned research, this work proposes a multi-scale fault diagnosis feature metric based on the fusion of multi-domain parameters.
In the realm of fault diagnosis, multi-source information fusion fault diagnosis has become increasingly popular as an intelligent and effective fault detection technique. Multi-sensor information fusion is used to give additional information for defect diagnosis to solve the issue of incomplete information reflected by a single sensor. 15 The data layer, feature layer, and decision layer are the three primary categories into which information fusion falls. The most popular of these are feature layer and decision layer fusion, while data layer fusion is more challenging to implement and has greater hardware requirements. To diagnose rolling bearing faults, Bai et al. 16 used a convolutional neural network in conjunction with multichannel fusion. Experiments show that the accuracy and clustering effect of fault classification can be effectively enhanced by convolutional neural network fusion of multi-sensor-derived picture data. Based on multi-layer classifiers, Zhang et al. 17 suggested a multi-level feature fusion convolutional neural network to address the issue of a few defect vibration signal data. The technique combines various signal characteristics retrieved from various layers, retrieves high-layered features while keeping more information about low-dimensional features, and integrates samples from several sensors to fully extract features. To enhance the effectiveness of problem diagnosis for rotating machinery, Peng et al. 18 employed a short-time Fourier transform to extract several vibration signal features. They then used residual neural networks to fuse the various data, resulting in high-quality low-dimensional fusion features. Experiments have shown that the method works well for identifying rolling bearing and gearbox issues. Although multi-dimensional data fusion can convey fault characteristics from several angles, it is prone to data redundancy, which impacts the fault diagnosis effect. To address the aforementioned issues, Zhao et al. 19 suggested a data fusion algorithm based on DS evidence theory and fuzzy set theory. The validation results demonstrate that this approach may address the shortcomings of the current multidimensional data fusion methods at the decision layer. The experimental results demonstrate that the multi-channel information fusion method can effectively identify gear faults, eliminate the uncertainty and defects of single-channel identification, and significantly improve the fault identification rate. Cheng et al. 20 used DS evidence theory to perform multi-sensor information fusion on the output of the SOM neural network to examine the impact of strong noise on gear fault diagnosis. Jiang et al. 21 developed a novel entropy index and applied it to DS evidence theory for multi-sensor decision-level fusion and rotating machinery failure diagnosis to increase the diagnostic efficiency of information fusion. Aiming to address the nonlinearity and time-varying nature of vibration signals, as well as the more complex composite fault characteristics of planetary gearboxes, this paper suggests using multi-parameter fusion to express the composite fault characteristics and further increase the fault diagnosis rate through multi-channel fusion.
This work proposes a composite fault diagnosis method for planetary gearboxes based on multi-parameter and multi-channel fusion, with the purpose of efficiently addressing the challenges of discriminating between composite faults while enhancing diagnostic accuracy. Based on the patterns in feature metrics across various fault severity stages, this method first constructs a new fault feature metric termed sample entropy root mean square (SE-Rms). This metric is more sensitive in distinguishing between different kinds of composite faults. A multi-parameter matrix based on SE-Rms is then created and fed into a support vector machine (SVM). The total accuracy of defect diagnosis is greatly increased by re-diagnosing misclassified samples using the multi-channel evidence fusion theory. The main content of this work is as follows: (1) This work proposes the enhanced fusion feature metric SE-Rms in response to the different trends shown by sample entropy and root mean square (RMS) when fault severity increases. The ability of feature metrics to distinguish between various fault kinds is greatly improved by this metric. The benefits of SE-Rms in increasing the diagnosis accuracy of composite faults have been confirmed by comparing the diagnostic performance of different feature matrices. (2) Based on SE-Rms, a multi-parameter feature matrix is created and fed into a support vector machine (SVM). To improve the diagnosis rate for composite faults, multi-channel evidence fusion theory is used to re-diagnose the misclassified samples from single-sensor measurements. Notably, this work uses experiments on composite faults in planetary gearboxes with various structures to confirm the efficacy and dependability of the multi-parameter and multi-channel fusion diagnostic method.
The next sections of this work are summarized and listed below. Section 2 illustrates the construction process of SE-Rms and describes the fault diagnosis strategy based on multi-parameter multi-channel fusion. Section 3 describes in detail the experimental principle of planetary gearbox compound faults and its experimental content, and demonstrates the limitation of a single fault characteristic for identifying compound faults through experimental data. Similar experimental validation protocols have already been used in previous studies.22,23 Section 4 experimentally validates the applicability and effectiveness of the MC-MCF method for the composite fault diagnosis of planetary gearboxes with varied structures. Finally, Section 5 gives the conclusion.
Fault diagnosis method based on multi-parameter and multi-channel fusion
New parameters for feature extraction
Conventional feature extraction methods frequently have low diagnostic accuracy because they are unable to detect early defects in planetary gearboxes. This section creatively suggests a new feature measure called sample entropy-root mean square (SE-Rms) to solve this problem. The evolution of feature characteristics under various fault degrees served as the basis for the formation of this metric. Notably, the proposed feature extraction method takes into consideration both the intrinsic nonlinearity of the vibration signals and the operational features of planetary gearboxes.
Selecting fault characterization indicators: The original signal’s distinctive parameters can only be examined in a scale domain; they are unable to reliably discern the state of mechanical functioning. The multi-resolution property of wavelet packet analysis is utilized to extract features from the original signal across multiple scales by integrating feature parameters with wavelet packet decomposition. The sym4 wavelet basis function has been extensively utilized in the field of gearbox fault diagnosis because of its regularity and near symmetry, which match the shock waveforms of planetary gearbox failures. 24 Additionally, the composite failure of planetary bearings and gears is the focus of this research. The three-level wavelet decomposition produces sub-band bandwidths of 2048 Hz with a sample frequency of 32,768 Hz, which completely covers the principal failure frequency range of planetary gearboxes (<2000 Hz). The frequency range grows excessively broad if there are insufficient decomposition layers, making it challenging to discern the fault modulation sidebands. On the other hand, an excessive number of layers greatly increases the computational effort and introduces high-frequency noise interference. Related research reveals that three-level wavelet decomposition is efficient for diagnosing gearbox and bearing faults.25,26 In order to accomplish multiscale feature extraction, this work uses sym4 as the wavelet basis function and splits the vibration signal down into three levels.
Fundamental parameter selection: A collection of indicators sensitive to typical planetary gearbox failures was chosen as the basic feature parameters. Sample entropy and the root mean square (RMS) value show clear patterns of change as the severity of failures in the sun gear and planetary bearings increases, with the two trends traveling in precisely opposing directions. Thus, this work chooses sample entropy and the RMS value as the fundamental factors to improve the discriminatory power between various types of failures.
Weighted average quotient of RMS values of wavelet packets in various frequency bands and sample entropy: Different frequency bands may exhibit identical maximum wavelet packet sample entropy and root mean square values for the same fault. Therefore, this work proposes the normalization of wavelet packet sample entropy across different frequency bands. The weighted average of the entire frequency bands is then obtained using the normalization coefficients as weights. Finally, the sample entropy and the RMS value of the entire frequency bands are used to perform the quotient to obtain a new parameter, the entropy root-mean-square value (SE-Rms).
As was mentioned above, feature extraction is carried out on the sample signals after they are intercepted at successive equal lengths of the original signal. For the measurement signal, this work employs the sym4 wavelet basis to perform a three-level multi-scale wavelet decomposition. Determine the RMS value and the entropy of the wavelet packet sample.22,23


where r is the standard deviation of the vibration signal and m is taken as 2 in this work. N is the length of the time-domain sample signal. x i is the amplitude of a sample point in the signal. A m (r) and B m (r) reflect the degree of self-similarity of the sequence in m + 1-dimensional and m-dimensional spaces, respectively.
The sample entropy and RMS values of the eight wavelet packet decomposition signals are calculated from equations (1) to (2) to form the eigenvectors

Normalize the elements of vectors

Find the weighted average of
Basic concepts of DS evidence theory
The DS evidence theory is a method of reasoning that addresses uncertainty. The degree of evidentiary support for a focal element is expressed as a value in the interval [0, 1] in an identification framework. An uncertainty interval is used to represent the degree of support for a proposition. 29 DS evidence theory provides a theoretical foundation for integrating data from various sources and offers some guidelines for evidence synthesis.
1. Recognition framework: Let

2. Basic plausibility assignment function:A is a subset in

where m(A) denotes the basic probability assignment (BPA) function in cell A.

where define the mapping
3. Dempster synthesis rules:

Since engineering assessments are frequently multi-site, the evidence is also frequently multi-source, and the underlying confidence assignments of the evidence vary depending on the measurement location. The combined BPA function m:

where N is the standard number assigning the lost belief in an empty set to the non-empty set in proportion, aiming to carrying out probit assignment. N measures conflicts between the evidence, and the greater the conflict is, the smaller the N is. When N = 0, evidence is in full conflict and thus the combined equation is inapplicable. In equation (9), the combination is orthogonal sum, denoted as

Multi-channel fusion method for SVM and DS evidence theory
Multiple measuring stations are used to gather vibration signals from the transmission in various directions. SVMs are then used to classify the fault type and identify the signals from each measurement point. However, relative incompleteness, imprecision, and ambiguity characterize the information that SVMs supply at each data point for identification and classification purposes. The precision (C ij ), recall (R ij ), and F1 score (F1) diagnostic performance evaluation metrics for SVMs at various measurement points are retrieved independently.



where the local reliability C ij of the jth SVM for the ith fault class. TP ij is the number of class i samples that the jth SVM correctly classifies. The number of samples from a class other than class i that the jth SVM mistakenly labels as class i is represented by FP ij . R ij is the recall rate of the SVM, and F1 is the F1 score. FN ij is the number of samples of class i that were misclassified by the jth SVM.
Based on this, the SVM outputs the posterior probability p(F i |x) for a given fault type (F i ). The classification reliability of the classifier itself must also be taken into account. The kth SVM assigns a basic probability (BPA) to F i .

Create a n × (m + 1) matrix M given an SVM with n data points and m fault classes:

The BPA for each type of fault is represented by the front m columns, the uncertainty assigned to the complete set Θ is represented by the last column, and each row provides an evidence source. The total of the elements in each row equals 1.
Figure 1 shows a multi-channel information fusion strategy based on SVM and DS evidence theory. Each channel first extracts features from vibration signals coming from different directions, and the SVM outputs local credibility (u) and posterior probability p(F i |x), based on which the basic probability assignment (BPA) is calculated. Subsequently, the BPA from each channel is merged into a single evidence entity using DS merging rules, and the misclassified samples are re-diagnosed using the final decision rule to verify and correct the diagnostic results.

Multi-channel information fusion strategy with SVM and DS evidence theory. 17
Experimental design and feature extraction
Planetary bearings and sun wheels are two parts of planetary gearboxes that are prone to failure. Thus, a DDS experimental platform is used in this research to simulate several of typical composite failures of planetary gearbox sun wheels and planetary bearings. It will be used to verify the effectiveness of the multi-parameter and multi-channel fusion diagnosis method.
Experimental setup
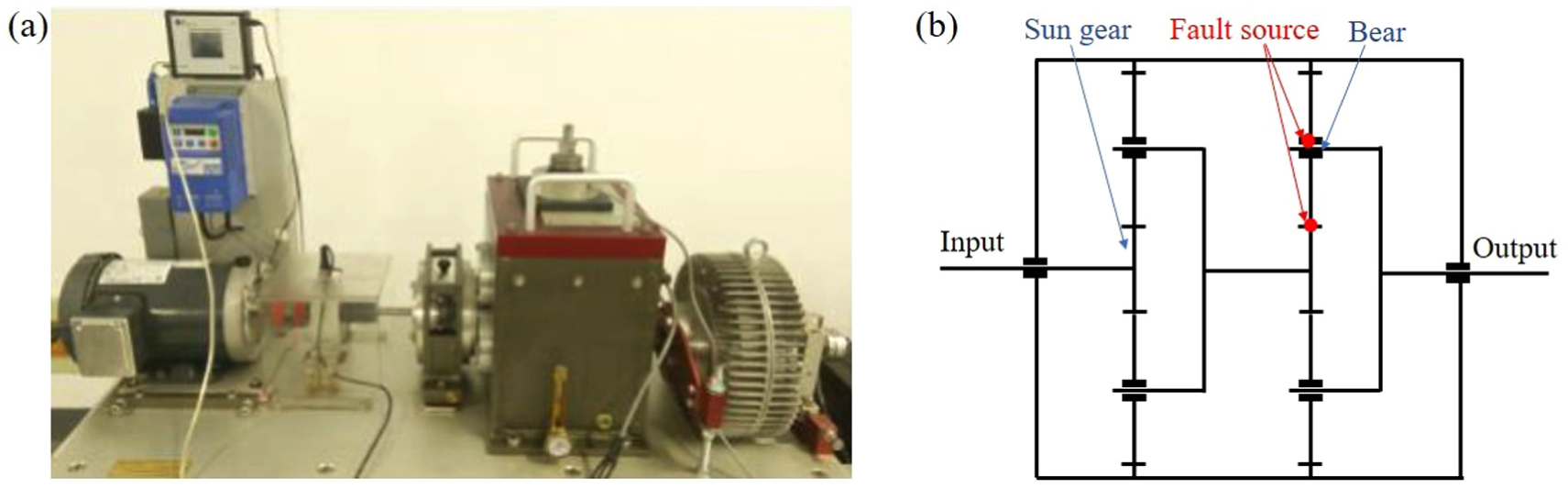
The DDS experimental platform is primarily comprised of a secondary stator gearbox, planetary gearbox, magnetic powder brake, and motor. The first-stage planetary transmission components of the two-stage planetary gearbox can be removed to convert it to a single-stage planetary gearbox. Single-stage or two-stage planetary gearbox faults are put on the sun wheel and planetary bearings of the two-stage planetary transmissions. Figure 2 depicts the DDS experimental platform site image and its two-stage planetary gearbox mechanism motion drawing. Three defective planetary bearings (outer ring, inner ring, and rolling element faults, respectively) and three defective sun wheels (worn, cracked, and broken tooth faults, respectively) were installed on the experimental platform. Figure 3 presents the faulty components within the experimental planetary gearbox. By removing and replacing these defective parts, the DDS experimental platform can replicate various sun gear and planetary bearing failure modes.
Experimental signals for different composite failures in single-stage planetary gearbox: (a) bearing rolling elements and gear tooth breakage, (b) bearing rolling elements and gear cracks, (c) bearing rolling elements and gear wear, (d) bearing inner rings and gear tooth breakage, (e) bearing inner rings and gear cracks; (f) bearing inner ring and gear wear, (g) bearing outer ring and gear tooth breakage, (h) bearing outer ring and gear cracking, and (i) bearing outer ring and gear wear.

Experimental platform equipped with faulty components of the sun wheel and planetary bearings: (a) Three typical faults of the sun wheel and (b) three typical faults of the planetary bearings.
Furthermore, the input speed and load of the planetary gearbox can be adjusted to maintain stable operating conditions according to experimental requirements. In this experiment, sensors were mounted externally on the gearbox housing in the vertical, horizontal, and axial directions. These sensors were connected to the data acquisition device through individual channels. Figure 4 illustrates the multi-channel sensor arrangement and the testing principle of the experimental platform.
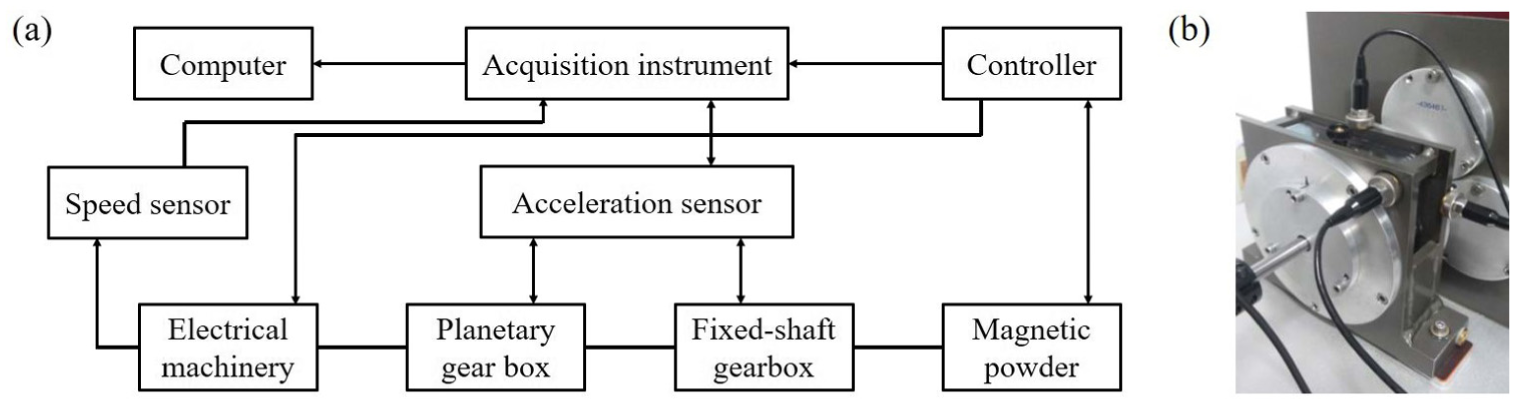
Test principle and multi-channel arrangement of the experimental platform: (a) test principle and (b) measurement point arrangement of the multi-channel.
Experimental design
This work collected vibration acceleration data from planetary gearboxes under steady-state conditions (rotational speed of 20 Hz, load torque of ∼14 N m). The following experiments were designed for single-stage and two-stage planetary gearboxes:
Single-stage planetary gearbox: Combined failure sequence involving the sun gear and planetary bearings;
Two-stage planetary gearbox: Combined failure sequence involving the second-stage sun gear and planetary bearings.
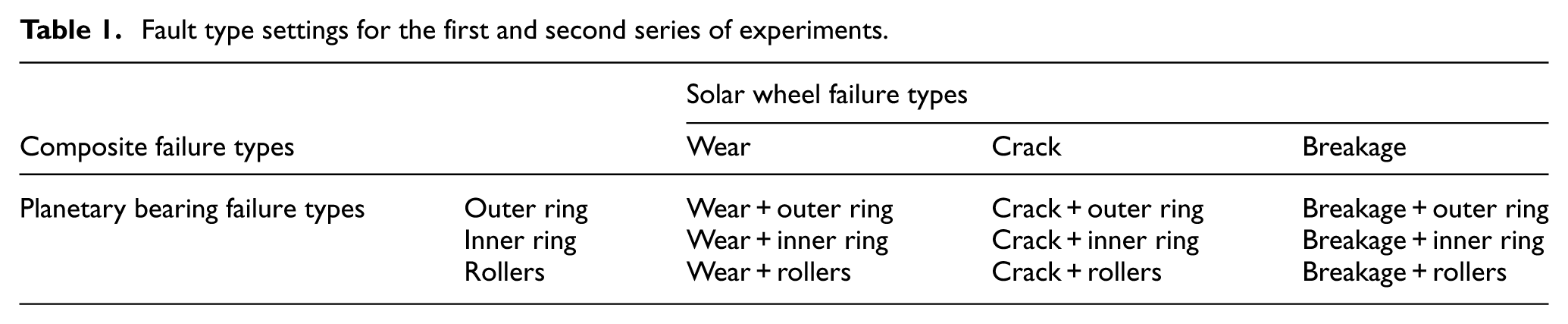
Wear, cracks, and broken teeth are the three types of sun gear failures. The rolling elements, inner ring, and outer ring are all affected by planetary bearing failures. Table 1 illustrates the composite failure types that are produced when these common failures are combined in pairs. A total of 18 failure categories are covered by the two sets of tests. But in the second set of experiments, the second-stage transmission structure of planetary gearbox is where the failure sources are found.
Fault type settings for the first and second series of experiments.
The aforementioned experiments consistently utilize the one to five channels of the data acquisition device, which represent the input rotational speed, output rotational speed, and vibration signals in the plumb, horizontal, and axial directions, respectively. Simultaneous sampling of the channels is conducted at the same frequency. A total of N0 data blocks can be continuously acquired, with the size of each block defined by its time duration T0 in seconds. Five data blocks are collected in a single trial, for a total of 90 data blocks, with a sampling frequency of 32,768 Hz and a data block length of 32 s.
Limitations of a single feature
The transmission path of vibration signals is also more direct in single-stage planetary gears, which is due to their simpler structure. The vibration effects of a single-stage planetary gearbox failure are more noticeable than those of a two-stage planetary gearbox failure. Thus, this section demonstrates the limits of using a single feature for composite fault identification using vibration signals from a single-stage planetary gearbox detected at the measurement points in the vertical direction. For each of the nine types of composite faults in a single-stage planetary gearbox, vibration acceleration signals lasting one second were sampled using the experimental setup described in Section 3.2, the time-domain waveforms are shown in Figure 5.

Experimental signals for different composite failures in single-stage planetary gearbox.
The composite fault time-domain vibration signals reveal periodic impact components in each fault waveform, as shown in Figure 5. However, depending on the kind of fault, these impacts’ intensity, interval, and modulation pattern differ slightly. For instance, wear-related composite faults show comparatively smaller amplitudes and a more uniform distribution, while tooth-breakage-related composite faults typically result in a single, large-amplitude impact.
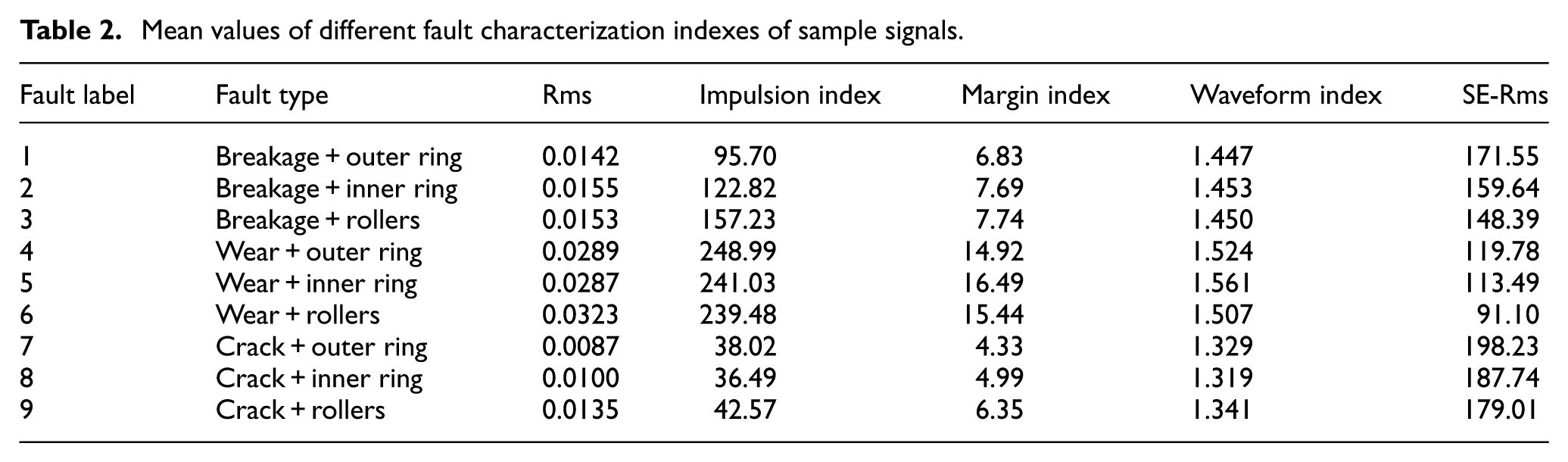
However, it makes it difficult to differentiate between the nine different types of composite faults based only on waveforms because the time-domain waveforms of various composite faults lack unique identifying features. To address this, this work further extracts time-domain metrics from the vibration signals of each fault. Twenty sample signals are sequentially extracted from the original signal, with a sample length of T0 = 1 s. The time-domain indexes SE-Rms, Rms, impulse index, margin index, and waveform index were computed for every sample for each type of defect. 30 Table 2 lists the average values of the 20 samples for each type of fault, and Figure 6 displays the trends of these indexes as a function of sample number.
Mean values of different fault characterization indexes of sample signals.

Trends in distinct characteristic metrics under various composite faults as a function of sample size: (a) SE-Rms, (b) Rms, (c) impulsion index, (d) margin index, and (e) waveform index.
The sensitivity of individual indicators to various composite fault types varies, and the ranges of fluctuation for these indicators typically overlap across several fault types, as demonstrated by the trends in the time-domain indicators as a function of sample number in Figure 6. Among them, the overlap between the margin index and the waveform index is the most severe, making it nearly impossible to establish effective classification boundaries. As a result, it is challenging to accurately differentiate between the nine different kinds of composite defects in planetary gearboxes when depending only on one time-domain indicator. Additional examination of the average values of the several indicators in Table 2 and Figure 6 shows that the SE-Rms and impulse index have good categorization capabilities. In particular, the impulse index can effectively differentiate the three major failure categories (wear, cracks, and tooth breakage), as well as gear cracks and composite failures including the three types of bearing failures. For composite failures including gear wear and the three types of bearing failures, however, SE-Rms shows a more noticeable separation effect. Additionally, for composite failures including gear cracks and the three types of bearing failures, both SE-Rms and Rms show notable intra-group variability.
In order to fully utilize the complementary strengths of each indicator and enhance the diagnostic accuracy for composite faults, this work constructs a multidimensional feature matrix using SE-Rms, Rms, and the impulse index based on the aforementioned analysis. This matrix is then fed into the SVM.
Verification of experimental results
Diagnostic effectiveness of different parameter fusion for composite faults
Different feature matrices are created by extracting many feature parameters, and these feature matrices are then fed into SVM. The superiority of SE-Rms for composite fault diagnosis of sun wheel and planetary bearing or the finiteness of multi-parameter fusion for composite fault diagnosis of planetary gearboxes are confirmed by comparing the diagnostic effects of various feature matrices on planetary gearbox faults.
Using a sample length of T0 = 1 s, 20 sets of sample signals were constantly intercepted from the data gathered in the lead, horizontal, and axial directions to illustrate nine compound faults of the sun wheel and planetary bearings of a single-stage planetary gearbox. A feature matrix was constructed by extracting the RMS, impulse metric, and SE-Rms from each sample signal. For each fault type, 20 sample sets were available. Ten sets were randomly selected as the training set for the SVM, while the remaining 10 sets formed the prediction set. Ninety sets of sample data are used to identify the fault type using the trained SVM. Figure 7 displays the SVM diagnostic results for several measurement sites.

Composite fault diagnosis results of the planetary gearbox at different measurement points: (a) vertical direction (SVM1), (b) horizontal direction (SVM2), and (c) axis direction (SVM3).
Figure 7(a) to (c) show the diagnostic accuracy of support vector machines (SVMs) with vertical, horizontal, and axial measurement points for nine types of composite faults. The colored blocks represent the proportion of samples correctly diagnosed for each fault mode out of the total number of samples for that fault type, which is the recall rate of the SVM for that specific fault.
These differences indicate that SVMs based on measurement points from different directions exhibit significant variations in diagnostic accuracy for different types of composite faults, which fulfills the prerequisite for the DS information fusion method to improve diagnostic performance. By averaging the diagnostic accuracy across all directions shown in Figure 7, the SVM achieved overall diagnostic rates of 93.3%, 90%, and 85.6% for the longitudinal, transverse, and axial measurement points, respectively. Overall, although composite failures in single-stage planetary gearboxes can be diagnosed using data from a single measurement point, and each measurement point exhibits high recognition rates for certain failure types, a certain number of misclassified samples still exist in each direction.
Different feature matrices are created by extracting many feature parameters, and these are then used as SVM inputs. By contrasting the diagnostic impacts of various feature matrices on planetary gearbox faults, the superiority of SE-Rms for planetary gearbox fault identification is confirmed. Feature matrices D, E, and F were constructed by combining specific parameters extracted from each sample signal. Matrix D comprises RMS and impulse metrics. Matrix E includes RMS, impulse metrics, and sample entropy. Matrix F consists of RMS, impulse metrics, and SE-Rms. These three feature matrices were separately used as inputs for the SVM classifier. The training and test sets remained consistent with the earlier description. The trained SVM was then applied to diagnose compound faults in the planetary gearbox, with the diagnostic results presented in Table 3.
Diagnostic results of SVM with different feature matrices.

As shown in Table 3, we can make the following deductions based on the diagnostic findings in the lead, axial, or horizontal directions: (1) Compared to feature matrices D and E, feature matrix F based on SE-Rms is the most effective for diagnosing planetary gearbox faults. (2) A comparison of matrices D and F reveals that the SE-Rms has greater significance in diagnosing planetary gearbox defects.
Multi-channel information fusion for composite fault diagnosis
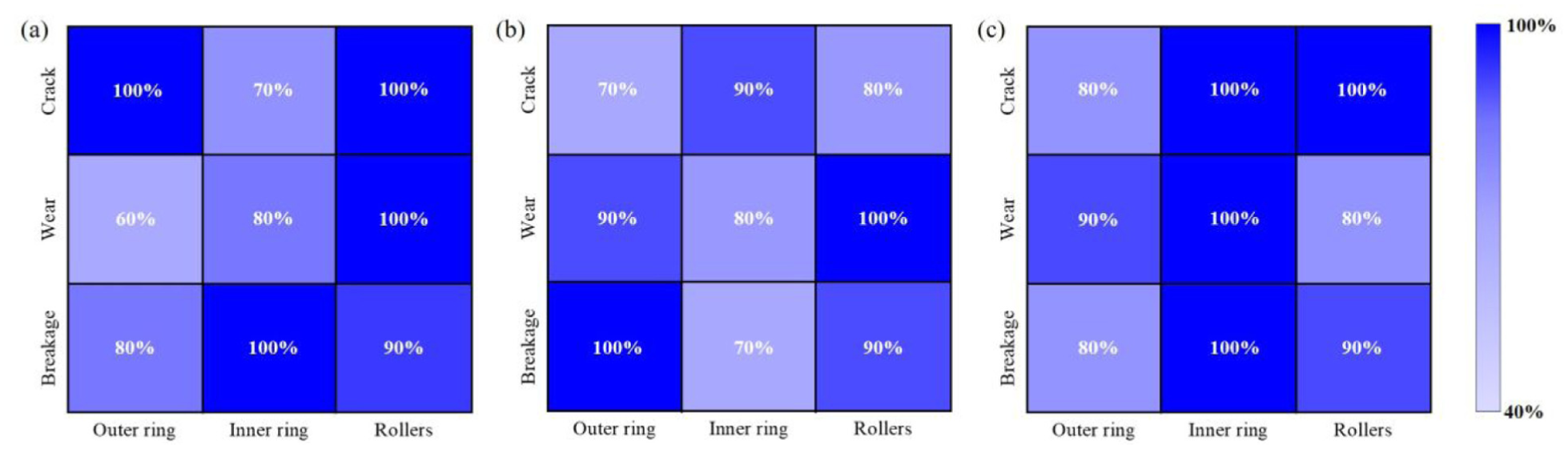
In order to diagnose the planetary gearbox problems, the RMS, impulse indicators, and SE-Rms of the defective sample signals are taken out of the first set of experimental data in Section 3.2. This feature matrix is then coupled with the fusion of multi-measurement point information. The confusion matrix displayed in Figure 8 is obtained by extracting the diagnostic results of the SVM for measurement points in various orientations from Figure 7. Based on this, and taking into account the diagnostic accuracy of SVMs in various directions as mentioned in Section 4.1, the global confidence (r i ) for the relevant SVM is derived, as indicated in the second column of Table 4. Additionally, equation (7) is used to determine the local credibility of the SVM for certain fault type based on the confusion matrix; the results are displayed in Table 4. Combining the local reliability from Table 4 and the recall rate from Figure 7, we used equation (9) to calculate the F1 scores for the diagnostic results of the SVM at different measurement points for various fault types. The results are shown in Table 5.

Confusion matrices for the planetary gearbox at different measurement points: (a) vertical (SVM1), (b) horizontal (SVM2), and (c) axial (SVM3).
Confidence values of SVM at each measurement point.

F 1 scores for SVM diagnostic performance at different measurement points.

The worldwide diagnostic capability of the different measurement points varies significantly, as Table 4 shows. The global reliability of the vertical SVM1 is the best (0.347). This is because attenuation along the transmission path affects the axial signal, while gear meshing directly affects the vertical direction, producing the most noticeable fault features. As seen in Tables 4 and 5, the identification capabilities of the various measurement stations for a particular fault type are complementary. The vibration responses of composite faults display distinct modulation components in different directions. Single-channel diagnostics, on the other hand, are prone to misdiagnosis, which indicates that data from a single measurement point is imprecise, unclear, and incomplete. By utilizing DS evidence theory to integrate multi-channel data, we may take use of the complementary qualities of many perspectives and employ conflict resolution guidelines to rectify errors.
DS evidence theory is employed to fuse the diagnostic information from the three measurement points of the SVM classifiers, which includes local credibility, credibility weights, and posterior probability. This process yields an integrated SVM output following information fusion. 31 The samples of misdiagnoses were labeled using a coordinate system, with the sample index as the vertical axis and the fault type as the horizontal axis. Each misdiagnosed sample is then extracted and re-evaluated using the fused SVM model. The results of this re-diagnosis are presented in Table 6. We determined the confusion matrices and recall rates for the diagnosis of various fault types following information fusion using equation (7), the outcomes are displayed in Figure 7. Building on Figure 9(a), we computed the local credibility (C ij ) and F1 scores of the SVM for various composite fault types following information fusion using equations (6) and (8); the results are shown in Table 7.
Re-diagnosis results of misdiagnosed samples at each measurement point by SVM.


Confusion matrix and recall rates for SVM-based diagnosis of different types of composite faults after DS information fusion.
Local credibility and F1 scores of SVM after multi-channel fusion for different composite faults.

Before fusion, the SVMs at each measurement point contained 1, 9, and 13 incorrectly categorized samples, as indicated in Table 6. Only three samples were finally incorrectly recognized after DS evidence fusion, with the majority of these misclassifications being corrected. This indicates that multi-channel information fusion can rectify recognition mistakes at certain measurement points by appropriately resolving conflicting evidence using the Dempster synthesis rule and successfully utilizing complementary evidence from multiple channels. DS fusion conducts a weighted summing of the confidence scores for the same fault across three directions, as can be shown by comparing Tables 5 and 7. Its low trust score is effectively suppressed when two or more directions produce accurate evidence, even if one direction produces an incorrect judgment. After fusion, the majority of faults were accurately categorized, with F1 scores for different fault categories typically reaching 0.89 or higher. Fault types 4 (wear + outer ring), 8 (crack + inner ring), and 9 (breakage + rollers) were represented by the three samples that were still misdiagnosed. As shown in the confusion matrix, the vibration characteristics of these fault exhibit high similarity across all three directions, and the differences in posterior probabilities among the SVMs for each direction are not significant. Consequently, the evidence fails to converge to the true class after fusion.
In summary, DS evidence fusion improved the diagnostic accuracy for composite failures in single-stage planetary gearboxes from 93.3%, 90%, and 85.6% across different directions to 96.6%. By quantifying evidence uncertainty and integrating complementary information, the fusion technique significantly enhanced the identification of failures that were previously difficult to distinguish, thereby validating the necessity and effectiveness of multi-channel information fusion in the diagnosis of composite failures.
Validation of composite fault diagnosis for planetary gearboxes with different structures
In Section 3.2, the second set of experimental data is used as an example to diagnose the composite faults of sun wheels and planetary bearings of two-stage planetary gearboxes. This proves that the multi-parameter multi-channel fusion approach is applicable to the fault diagnosis of two-stage planetary gearboxes. Table 1 displays the fault settings. Twenty sets of sample signals with sample length T0 = 1 s were collected from the three measurement point signals in the first data block of each fault type, correspondingly, at an inter-sample interval of 1 s.
In order to verify the applicability of the multi-parameter multi-channel fusion approach to the fault diagnosis of two-stage planetary gearboxes, the second set of experimental data in Section 3.2 is used as an example to diagnose the composite faults of sun wheels and planetary bearings of two-stage planetary gearboxes. The fault settings are shown in Table 1, and 20 sets of sample signals with sample length T0 = 1 s were intercepted at an inter-sample interval of 1 s from the three measurement point signals in the first data block of each fault type, respectively. As inputs to the SVM, the SE-Rms, impulse metrics, and RMS of each of the aforementioned sample signals were taken out and combined into a feature matrix. Ten of these groups are chosen at random to serve as the training set, and the remaining 10 serve as the prediction set. At each measurement point, the vibration data is diagnosed using the trained SVM. the results are displayed in Figure 10.
Composite fault diagnosis of double-pole planetary gearbox with different measurement points: (a) lead hammer direction (SVM1), (b) horizontal direction (SVM2), and (c) axis direction (SVM3).
Since the fault source of the double-pole planetary gearbox is located in the second-stage transmission system and the nonlinear and time-varying characteristics of the vibration signals are more complex than in the single-stage planetary gearbox, as shown in Figure 10, the diagnostic rate of the SVM at each measurement point is slightly lower. The fault diagnosis rates of the SVM classifiers were evaluated separately for each measurement point. SVM1 achieved a diagnosis rate of 86.67% in the vertical direction, SVM2 attained 85.56% in the horizontal direction, and SVM3 reached 91.11% in the axial direction. These results demonstrate the continued effectiveness of the multi-parameter matrix F for diagnosing faults in two-stage planetary gearboxes, with SE-Rms serving as its central component. Based on the SVM classification outcomes, the confidence degrees of the classifiers for each measurement orientation were calculated and are listed in the second row of Table 8. Using DS evidence theory, the diagnostic outputs from each evidence source were fused. The misdiagnosed samples were then re-evaluated by the fused SVM, and the final diagnostic results are presented in Table 8. The third row of Table 8 presents the residual misdiagnosis rate for each measurement direction after information fusion. This rate is calculated as the number of misdiagnosed samples remaining after fusion divided by the number of misdiagnosed samples before fusion. The fourth row of Table 8 lists the labels of samples that remain misdiagnosed after information fusion, each label is formatted as (fault type, sample number).
Results of the diagnostic fusion of data from several two-stage planetary gearbox measurement points.
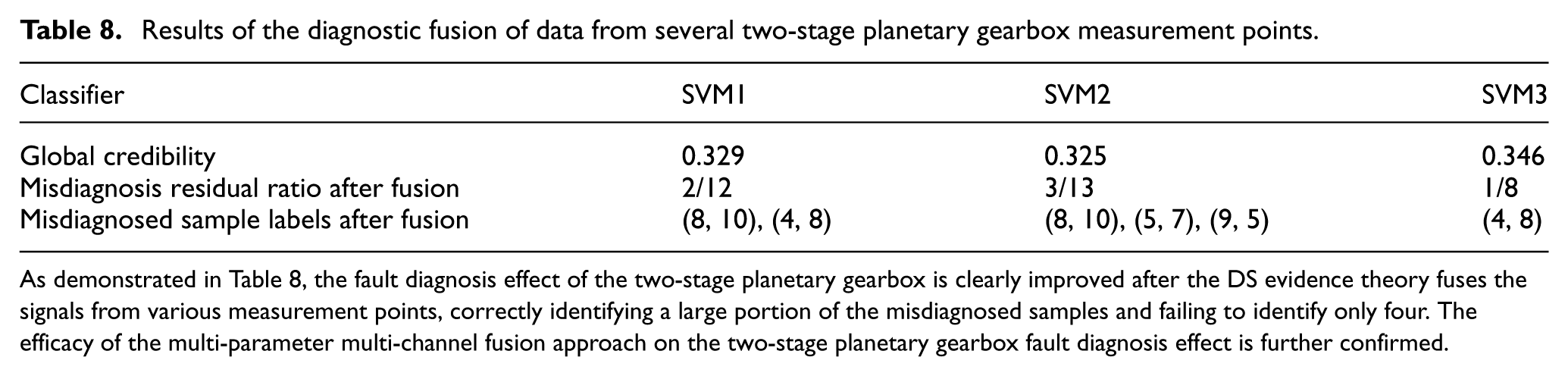
As demonstrated in Table 8, the fault diagnosis effect of the two-stage planetary gearbox is clearly improved after the DS evidence theory fuses the signals from various measurement points, correctly identifying a large portion of the misdiagnosed samples and failing to identify only four. The efficacy of the multi-parameter multi-channel fusion approach on the two-stage planetary gearbox fault diagnosis effect is further confirmed.
Conclusion
This work proposes a multi-parameter and multi-channel fusion-based fault diagnosis method that significantly increases diagnostic accuracy of composite faults in planetary gearboxes with various structures. The method initially creates sample entropy root mean square (SE-Rms), an improved fusion-based fault feature metric. Second, a multi-parameter feature matrix is constructed utilizing SE-Rms as input for the support vector machine (SVM). The diagnostic performance for composite faults in planetary gearboxes is effectively improved by using multi-channel evidence fusion theory to re-diagnose misdiagnosed samples from single-measurement points. Experimental results demonstrate the efficacy and suitability of this method for identifying composite faults in planetary gearboxes with different structures.
This work proposes an improved fused feature indicator (SE-Rms). The SE-Rms indicator was developed because sample entropy and root mean square (RMS) values show distinct trends as fault severity evolves. The ability to differentiate between various defects is significantly improved by this indicator. The stability and efficiency of SE-Rms are improved by the feature extraction method, which completely takes into account the nonlinear nature of the signals and the structural features of planetary gearboxes. The advantages of SE-Rms in the diagnosis of composite faults in planetary gearboxes have been confirmed by comparing the diagnostic performance of various feature parameter matrices.
This work proposes using SE-Rms to diagnose composite faults in planetary gearboxes using a multi-parameter and multi-channel fusion-based method. First, comparative validation was utilized to demonstrate the limitations of single-feature parameters in identifying composite faults. Second, the combination of multi-channel fusion theory and a multi-parameter matrix greatly increased the diagnostic accuracy for composite faults in planetary gearboxes when compared to single-point fault diagnosis. According to experimental results, the method proposed in this work yields a composite fault accuracy of 96.6% for single-stage planetary gearboxes. Notably, the diagnostic accuracy for two-stage planetary gearboxes also approaches 94.4%, demonstrating the efficacy and broad applicability of this method.
This work proposes a fault diagnosis method based on multi-parameter and multi-channel fusion using the SE-Rms indicator, which effectively identifies nine types of composite faults in the sun gears and planetary bearings of planetary gearboxes with different structural configurations. However, in order to further validate the diagnostic performance of this method in composite fault scenarios like gear-to-gear and bearing-to-bearing failures, future work will involve collaboration with laboratories equipped with a wider range of defective components due to limitations in the test bench configuration.
Footnotes
Handling Editor: Dr. Aarthy Esakkiappan
Author contributions
Manuscript writing and data processing: Fuguang Wang. Proofreading of manuscripts and project management: Wei Li.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work has been supported by the Anhui Provincial University Research Fund (2023AH051665).
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
The datasets used and/or analyzed during the current study available from the corresponding author on reasonable request.