
Abstract
To promote the precision and flexibility of the dexterous robot finger, a novel impedance-based robust fuzzy sliding mode control approach is developed. In the proposed scheme, an impedance control part constructed aims to regulate the contact force; while the robust fuzzy sliding mode controller proposed accounts for enhancing the anti-interference of this uncertain robotic system. Specifically, by analyzing the forward and inverse kinematics of the finger, its dynamical model with unknown and uncertain force disturbances can be established, and based on this model, a novel robust sliding mode impedance force controller has been designed, also, several critical impedance control parameters can be quickly optimized by invoking the fuzzy logic system. Ultimately, the Lyapunov stability of the proposed control is strictly demonstrated in mathematics. The simulations present the efficacy of the proposed scheme in both constrained and unconstrained spaces.
Keywords
Introduction
Stable and effective controls are critical for the dexterous robot finger to work successfully. To accomplish the predefined tasks precisely, dexterous robot finger not only needs to track the desired trajectories but also regulates the contact force between the finger and the environment properly. 1 Given that the dexterous robot finger often operates in a restricted environment, the position tracking deviations of constrained motion usually lead to excessive contact forces and then impair the finger itself. As a result, a certain flexibility is required for dexterous hands in performing contact control tasks.
Currently, compliance control can be classified into two categories, that is, active and passive control modes. For the passive control mode, the kernel of which is installing several flexible devices in the terminal joints of the dexterous finger; however, as the weight of the finger increases, the dexterity will be reduced. Compared to the passive control mode, the active compliance mode utilizes the external control inputs to adjust contact forces, thus it has a higher flexibility and recently extensive research studies were working on this aspect. The most frequently employed compliances are the force/position hybrid control and impedance control. Despite the force/position hybrid control scheme has been successfully applied to many robotic fields, 2,3 the shortages of this approach are noticeable, for instance, considering the choice of stiffness matrix and the existing force control loop, the force/position hybrid control method will be highly dependent on the specific tasks and environments, besides, the desired forces should be known a priori and which incurs the higher requirements for control structure.
Distinct from the mechanism of force/position hybrid control, by establishing a mapping relationship for the target impedance between contact forces and positions, the impedance control can implement better flexibility and robustness to parameter perturbations 4 ; thus it gains wide applications in the compliance control of industrial robots since this scheme was pioneered by Hogan. For instances, Chiu et al. 5 proposed a joint position-based impedance control scheme for load compensation; Focchi et al. 6 put forward a design approach for joint impedance controllers based on the inner torque loop and the positive feedback loop; Roveda et al. 7 proposed an model-based reinforcement learning (MBRL) variable impedance controller to minimize the interaction forces in human–robot collaborations; Ji et al. 8 proposed an adaptive impedance control scheme for an apple harvesting robot to reduce the damages to fruits; Perez-Ibarra et al. 9 proposed an assistive–resistive approach to promote the active participation of stroke patients during rehabilitation therapy; considering the practical compliant requirements in operating robot dexterous hands in uncertain environments, Ott et al. 10 developed a passivity-based framework for controlling the flexible joint manipulators. Yang et al. 11 proposed the Cartesian impedance controller for a dexterous robot hand called HIT. Furthermore, to compensate for the unknown uncertainties or disturbances, recently several adaptive and fuzzy logic control schemes have been developed for the compliance purpose. 12 –14
From the detailed overview aforementioned, although it seems that all the compliance control methods have been proposed for dexterous hands, actually, most of them only verify the control performance in joint space, without considering the influence of modeling error and nonlinear coupling between joints on the system performance. In terms of control algorithm, the system adopts impedance control or adaptive impedance control, which can ensure contact flexibility, but it is difficult to ensure tracking accuracy and anti-interference capability. Moreover, many articles do not strictly analyze the stability of the control strategy.
Since the robot dexterous fingers often adopt the rope transmission,
15
the high transmission ratio and multi-freedoms usually lead to flexibility, coupling, and nonlinearity. As a result, system uncertainties are unavoidable in the dynamics of dexterous hands.
16,17
Moreover, considering the uncertainties are possibly time-varying and fast time-varying, the compliance control and uncertainty suppression problems for dexterous hands need to be further explored. To ensure the control performance of the dexterous finger before and after contact, motivated by these existing investigations, and to improve the tracking precision and robustness, this article integrates the impedance control, the fuzzy logic system, and the robust sliding mode control seamlessly. The major contributions of current research are twofold. Aiming for the grasp characteristics of the dexterous hand, a novel impedance controller is developed to increase the flexibility of the finger operation. For several critical impedance parameters, the fuzzy set theory can well optimize them. By combining the impedance control and robust sliding mode control design, not only the time-varying uncertainties, such as nonlinear frictions and unknown disturbances, can be well compensated but also the tracking precision in unconstrained space and the flexible contact control in constrained space can be both guaranteed. The Lyapunov stability of the proposed control is strictly demonstrated in mathematics.
System description
Kinematical modeling of dexterous robot finger
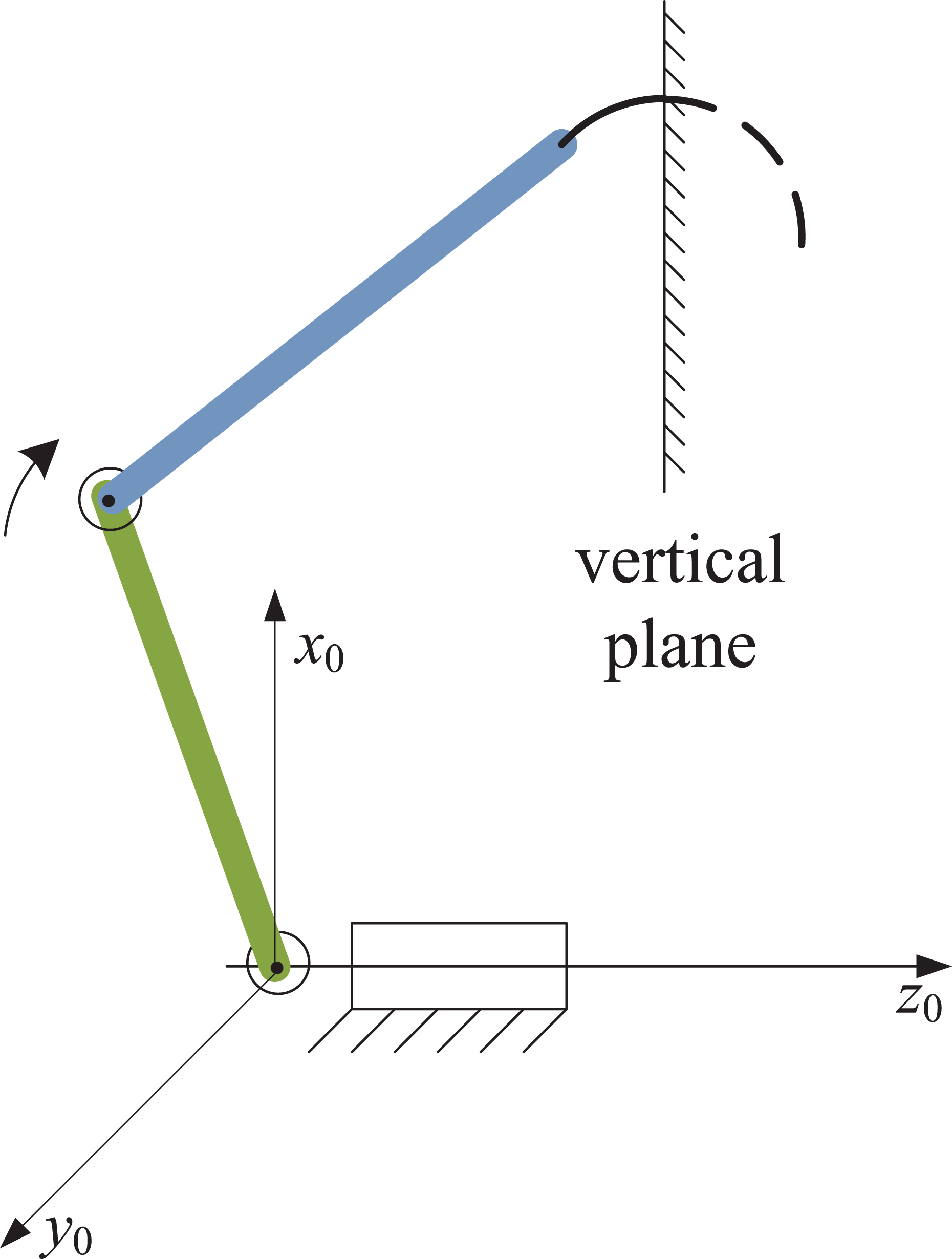
Before the dynamical modeling, it is necessary to analyze the forward and inverse kinematics of the dexterous finger. This article mainly investigates the index finger (or ring finger) with three degrees of freedom (see Figure 1). The motion of this dexterous finger includes the lateral swing of the lower knuckle, and the flexion of the middle knuckle and the upper knuckle, where the lateral swing axis is perpendicular to the flexion axis. To better describe the kinematics of this robot, the D-H parameters are given in Table 1.
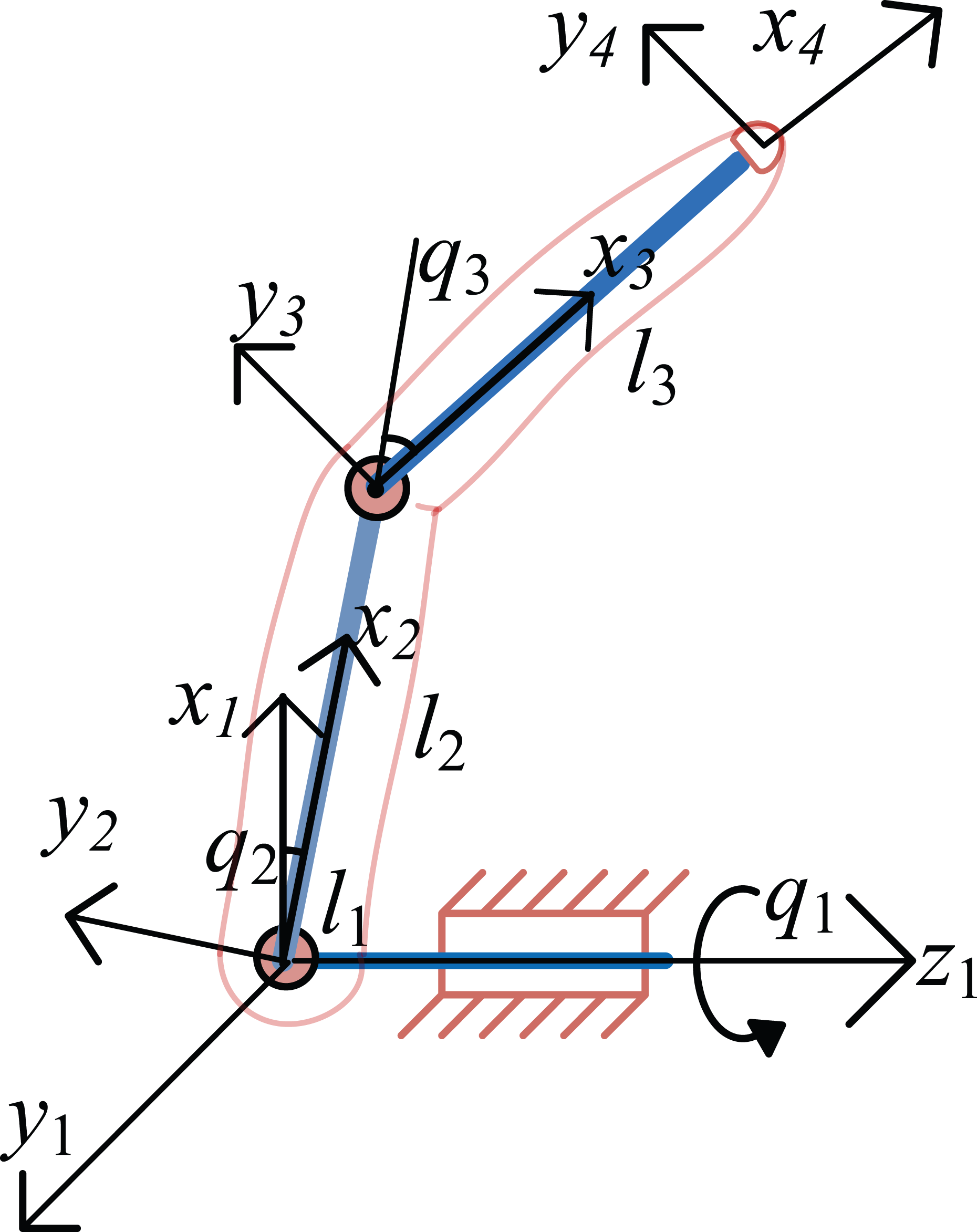
Diagram of the finger.
D-H parameters for index finger.

According to the D-H parameters and kinematics principle, the position and orientation of each joint frame can be obtained as follows
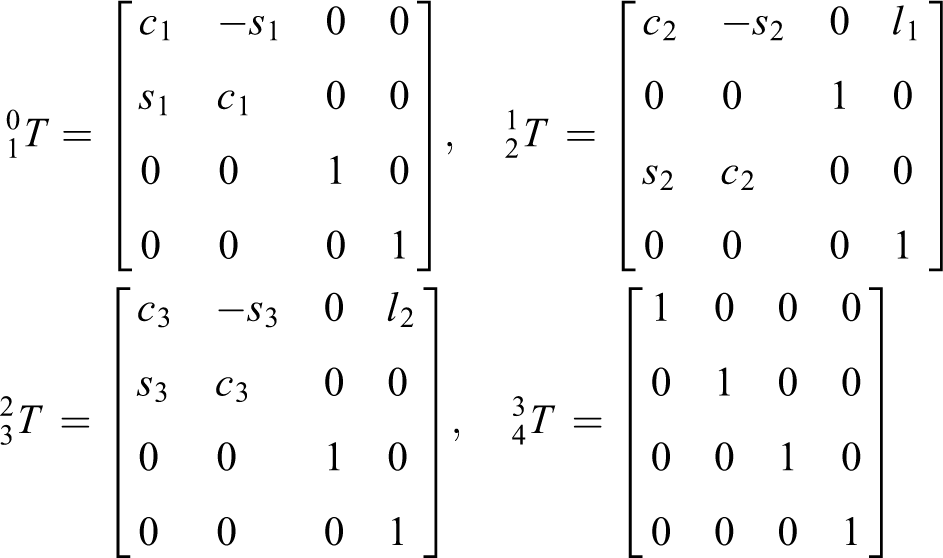
then, the total transformation matrix
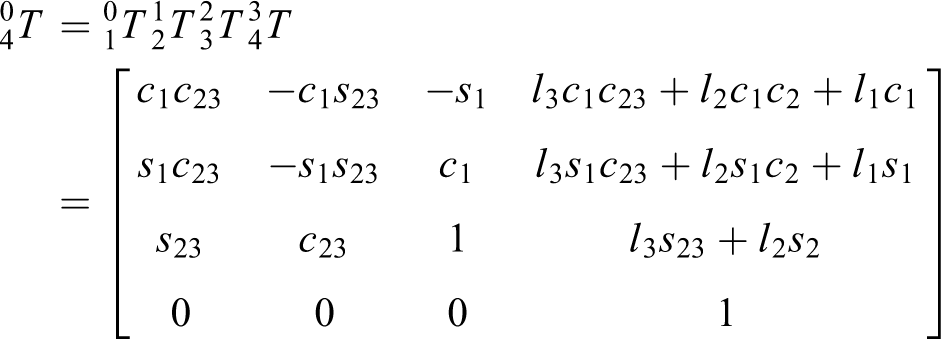
where
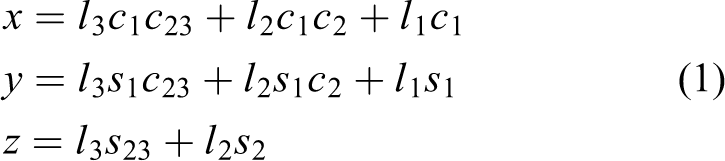
Subject to equation (1), the solutions to joint positions

Next, by substituting equation (1) into equation (2), the joint position q 2 can be acquired as

where

where

In view of the mapping relationship
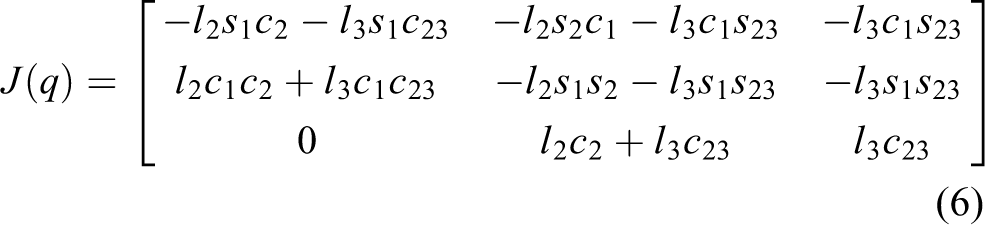
by representing the velocity mapping from joint space to workspace.
Dynamical modeling of dexterous finger
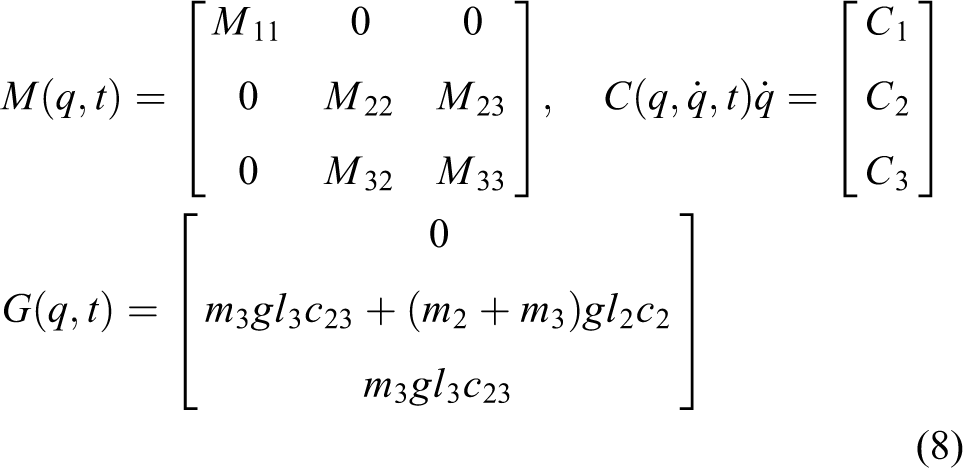
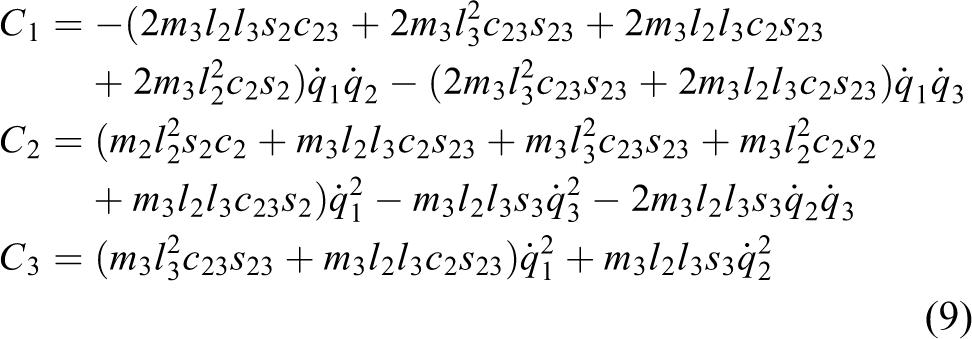
Considering the following dynamical equation for dexterous finger

where
Given that the dexterous finger generally adopts the tendon rope transmission, the nonlinear frictions that mainly encompass coulomb and viscous friction are modeled as
where




For the sake of compliance control, it is necessary to transform the dynamical model of the dexterous finger from joint space to Cartesian space. Under several static equilibrium conditions, there has a linear mapping between the translational force Fx transmitted to the fingertip and the joint torque, 18 that is

Taking the derivative of equation (5), it yields

substituting equation (11) into equation (7) and reorganizing, we can obtain the dynamical model of the dexterous finger in the workspace as follows

where
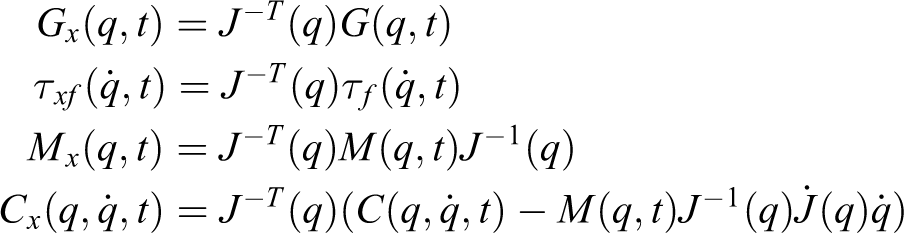
and
Assumption 1
For any
Assumption 2
For any
Remark 1
Assumptions 1 and 2 are the inherent properties rather than the hypotheses, since for most of articulated robots, both Assumptions 1 and 2 can be satisfied.
Impedance-based robust fuzzy sliding mode controller design
Aiming for the position and impedance control targets of robot dexterous finger, the following design requirements shall be met. (1) The trajectory following control: When the robot finger moves in the free space, the system uncertainties and frictions should be well attenuated, so as to track the reference trajectories swiftly and precisely. (2) The impedance control: To render the contact forces to be within an expected range, the controller should meticulously manipulate the contact forces between the fingertip and the object, with the purpose that guaranteeing the flexibility of operation and avoiding the rigid impact.
Subject to the above requirements,
19
the proposed control block for the finger is shown in Figure 2. First, given the workspace of the fingertip, the reference trajectory xc
is planned, then by invoking the impedance controller proposed, the transformation from the fingertip position to impedance force can be implemented, besides, the practical position of the fingertip x can track the desired impedance trajectory xd
, and the contact resistance Fe
is acquired. Next, via analyzing the inverse kinematics of the finger, its spatial position has been converted to the joint angle q, and then, both the position tracking error e and its derivative
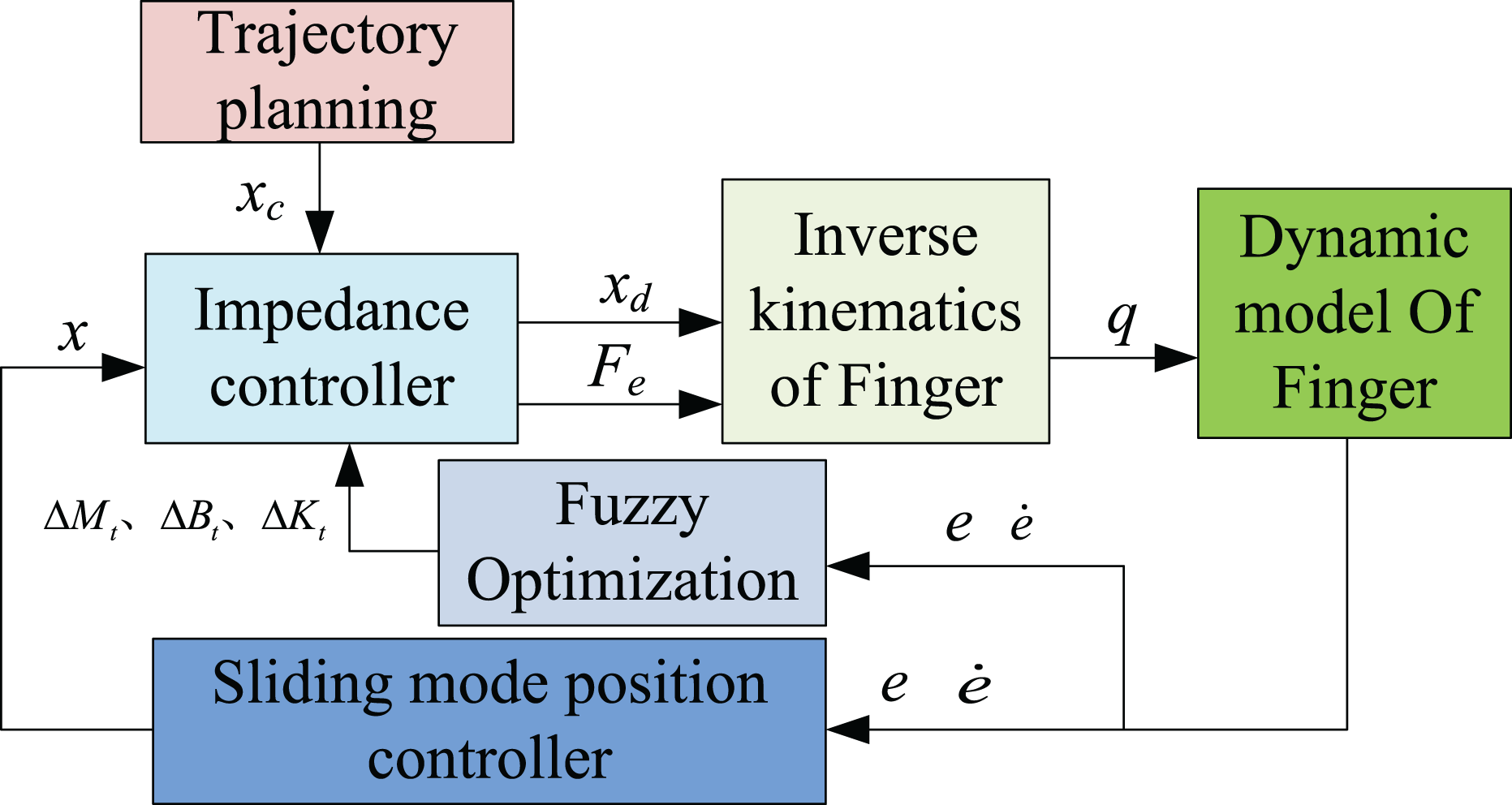
Proposed control block for the dexterous robot finger.
Impedance control design and fuzzy optimization
In this section, we define the impedance control (i.e. the interaction between the fingertip and environment) as a mass–damping–spring system, which describes the majority of the dynamic mapping between the forces and positions. Let the desired trajectory be xc , the contact resistance between the fingertip and physical object be Fe , as shown in Figure 3, the goal of impedance control is as follows: The practical position x of the fingertip can track the desired impedance trajectory xd when the fingertip acts on the physical object, and xd can be derived by the following differential equation

where
Schematic of the impedance control for the dexterous robot finger.
In general, the stiffness of robot finger contacting with the environment is uncertain, and this causes a significant change in the contact forces between the finger and the environment, thus the control efficacy is very difficult to guarantee. By regulating the impedance parameters appropriately, the force/position mapping between the fingertip and the actual environment can be changed, furthermore, to avoid the complex adjustment of impedance parameters and promote the estimation accuracy of contact forces, the fuzzy logic system is developed to perform the fuzzy self-tuning for impedance parameters.
The specific regulating steps are as follows: First, we establish the fuzzy mapping between the position deviation e and the changing rate
Let
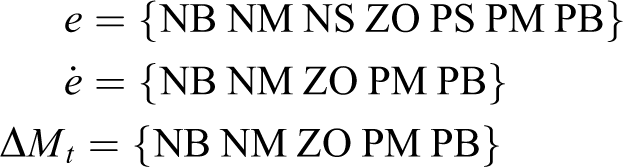
where
Fuzzy logic rules.
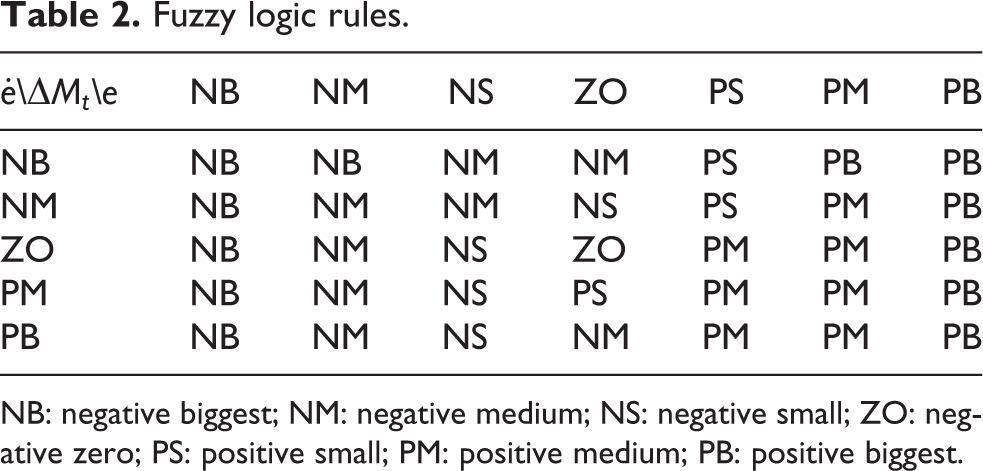
NB: negative biggest; NM: negative medium; NS: negative small; ZO: negative zero; PS: positive small; PM: positive medium; PB: positive biggest.
To solve the fuzzy parameters (e.g.
where
Similarly, the fuzzy treatment of damping and stiffness coefficients (i.e.
Robust sliding mode position control design
Before presenting the robust sliding mode controller, it is necessary to choose the proper switching function and reaching law. Supposing the desired trajectory of the fingertip is xd , and xd is C 2 continuous, then, the tracking error can be expressed as

For position tracking control of fingertips, the sliding function is given below

where
Since the oscillation will arise if the symbolic function is applied in the reaching law of sliding mode control, in this article, we adopt the exponential reaching law instead of the switching or other functions to remove the discontinuous characteristics, this can not only reduce the chattering in sliding mode control but also improve the dynamic response of sliding mode control. The reaching law is designed as

where
Let


where
Stability analysis for the proposed control
Theorem 1
Consider the uncertain mechanical system (7) subjected to Assumptions 1 and 2, the uniform boundedness (UB) and uniform ultimate boundedness (UUB) can be ensured by the control (19). UB: For any UUB: For any
Proof
By substituting equation (19) into equation (12), equation (12) can be rewritten as
With equations (15), (16), and (18), we have

next, by substituting equation (21) into equation (20), it leads to

Here, recalling Assumption 1,

differentiating equation (23) along the system trajectory (7), we can obtain

as shown in Assumption 2, the matrix

by combining equations (25) and (22), equation (24) further turns into

Subject to the claim in Polycarpou and Ioannou, 20 we have
where
where
In the light of the lemmas in Petros and Jing
21
and Yang et al.,
22
it can be inferred that
and equation (29) implies that

According to the above formula, the tracking error and error derivative converge gradually, the convergence accuracy depends on the δ, ε, and λ, when ε and δ are smaller, λ is larger, the error is smaller, and the convergence effect is better.
This accomplishes the proof of Theorem 1.
Numerical simulations
In this section, to testify the feasibility and effectiveness of the proposed control scheme, a dexterous finger with three joints (see Figure 1) is taken into account. Assuming that once the finger contacts the physical object, the normal direction of the contact surface is blocked, joints 2 and 3 perform the flex and extend operations, while joint 1 is static. As a result, the length of joint 1 is set as zero with a purpose of regulating the operation plane of the fingertip.
In simulations, the parameters involved are summarized as follows:
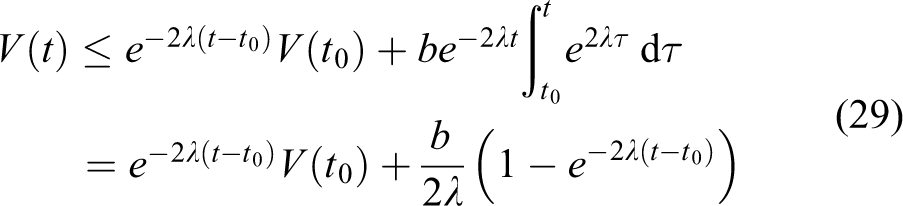
Position tracking using fuzzy-impedance-sliding mode control.
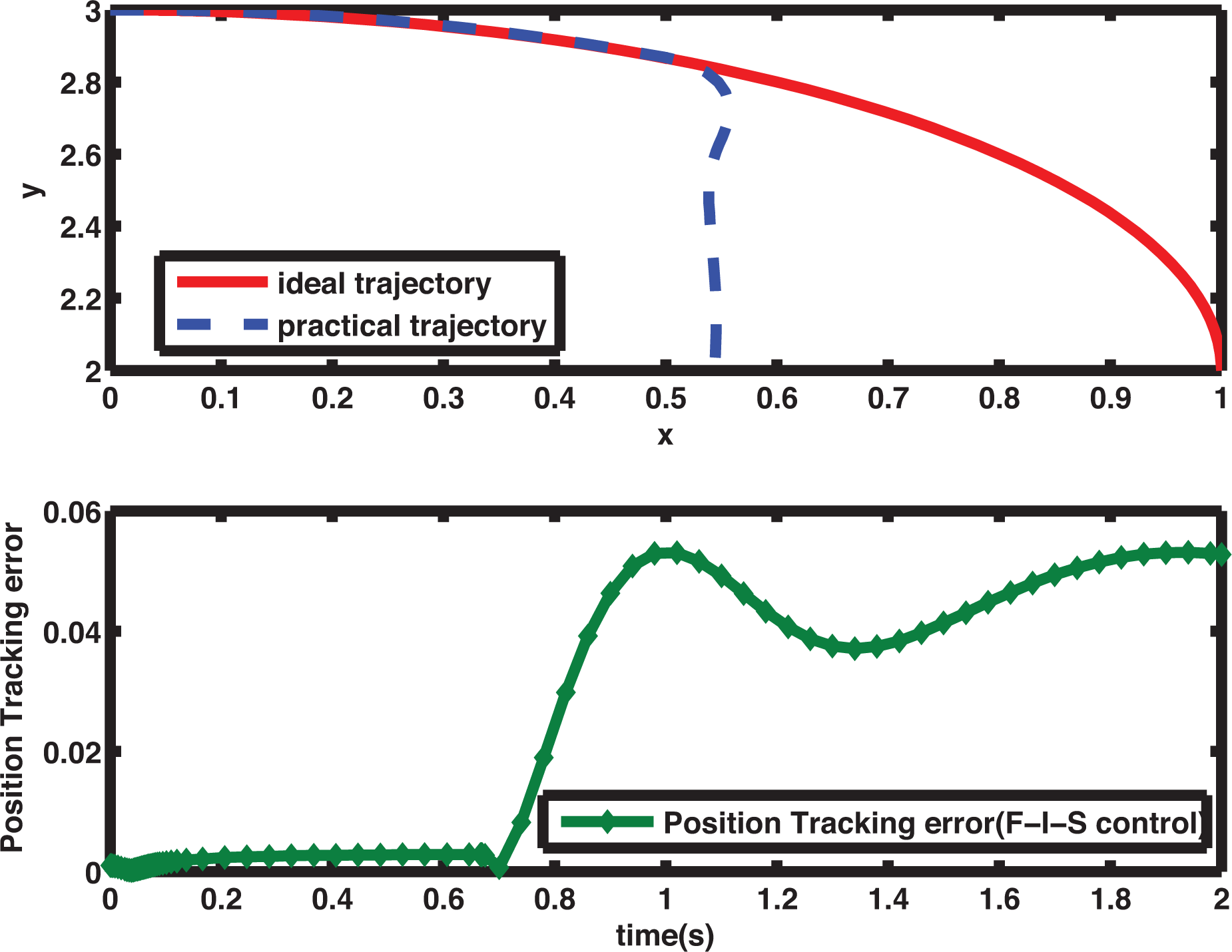
Position tracking using PD control.

Position tracking using sliding mode control.
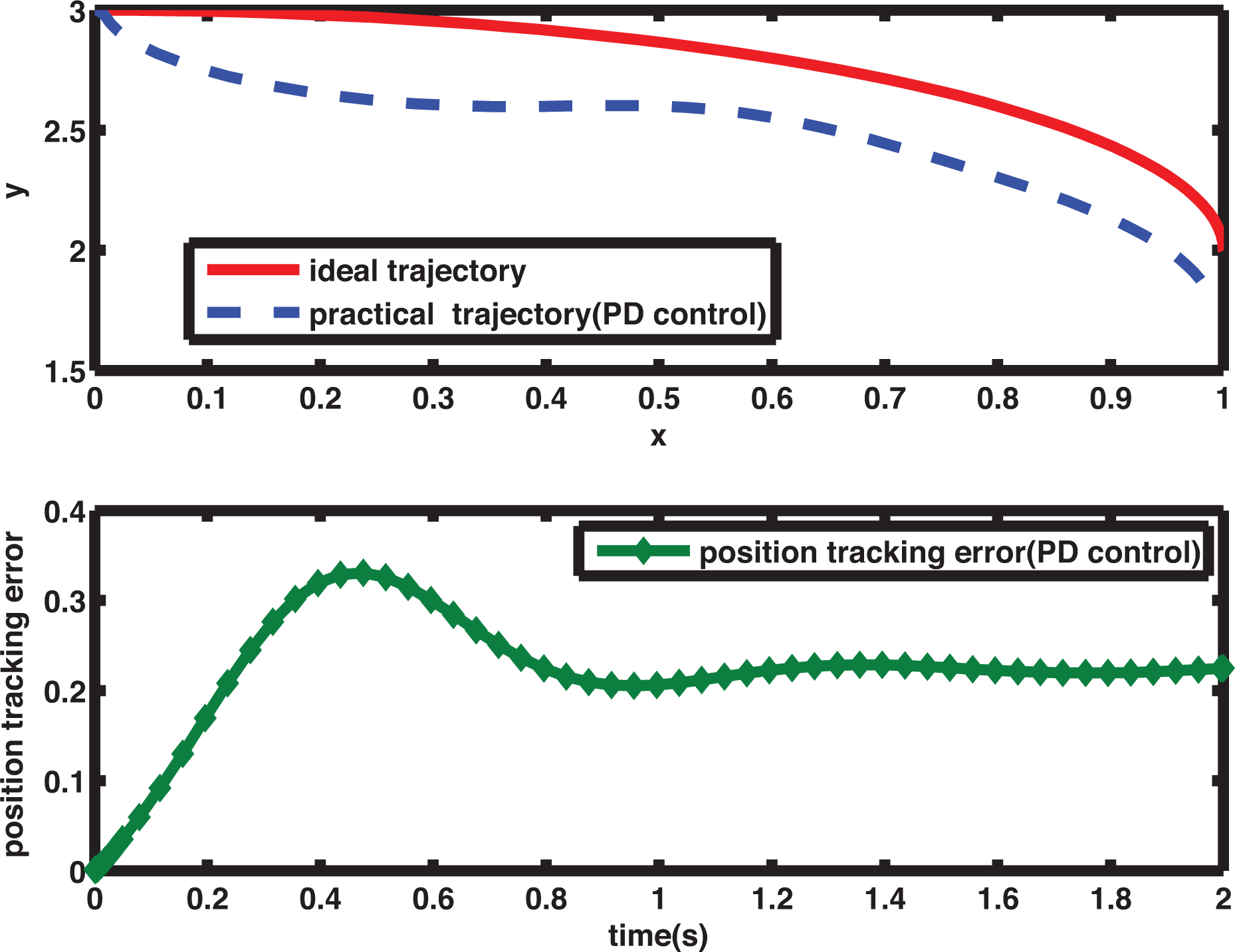
Position tracking effect in X and Y directions.

External forces acting on the fingertip.
Figure 4 shows the practical tracking for the desired trajectories in Cartesian space, from which it can be seen that, when
From the error distribution in Figure 4, the tracking error of spatial position is small in the free motion phase. After being constrained, the tracking error increases and finally stabilizes around 0.042, with a maximum error of 0.053, which indicates the maximum tracking error is 5.3%. The increase of the error occurs in the damping movement stage, which indicates that the error is mainly caused by the damping motion, and it is a loss of tracking accuracy to improve the flexibility of the system.
Compared with Figure 4, when the constraint of the fingertip is not considered, the system only adopts proportional derivative (PD) control and sliding mode control, and the control effect is shown in Figures 5 and 6. Figure 5 shows the effect of PD control. It is obvious that the effect of PD control is poor, the tracking error fluctuates around 0.22, which shows the tracking error reaches 22%, and there is no compliance control effect. Figure 6 is the effect diagram of sliding mode control, and its relevant design parameters are consistent with those in the text. It can be seen that if the system operates without constraints in Cartesian space, the sliding mode control performance is very good, with the highest accuracy, and the tracking error is stable at 0.0006, which shows the anti-interference ability and high-precision tracking ability of the sliding mode control, but there is also no compliance control effect. These two control effects cannot meet the requirements of the position accuracy and compliance control of finger movement at the same time.
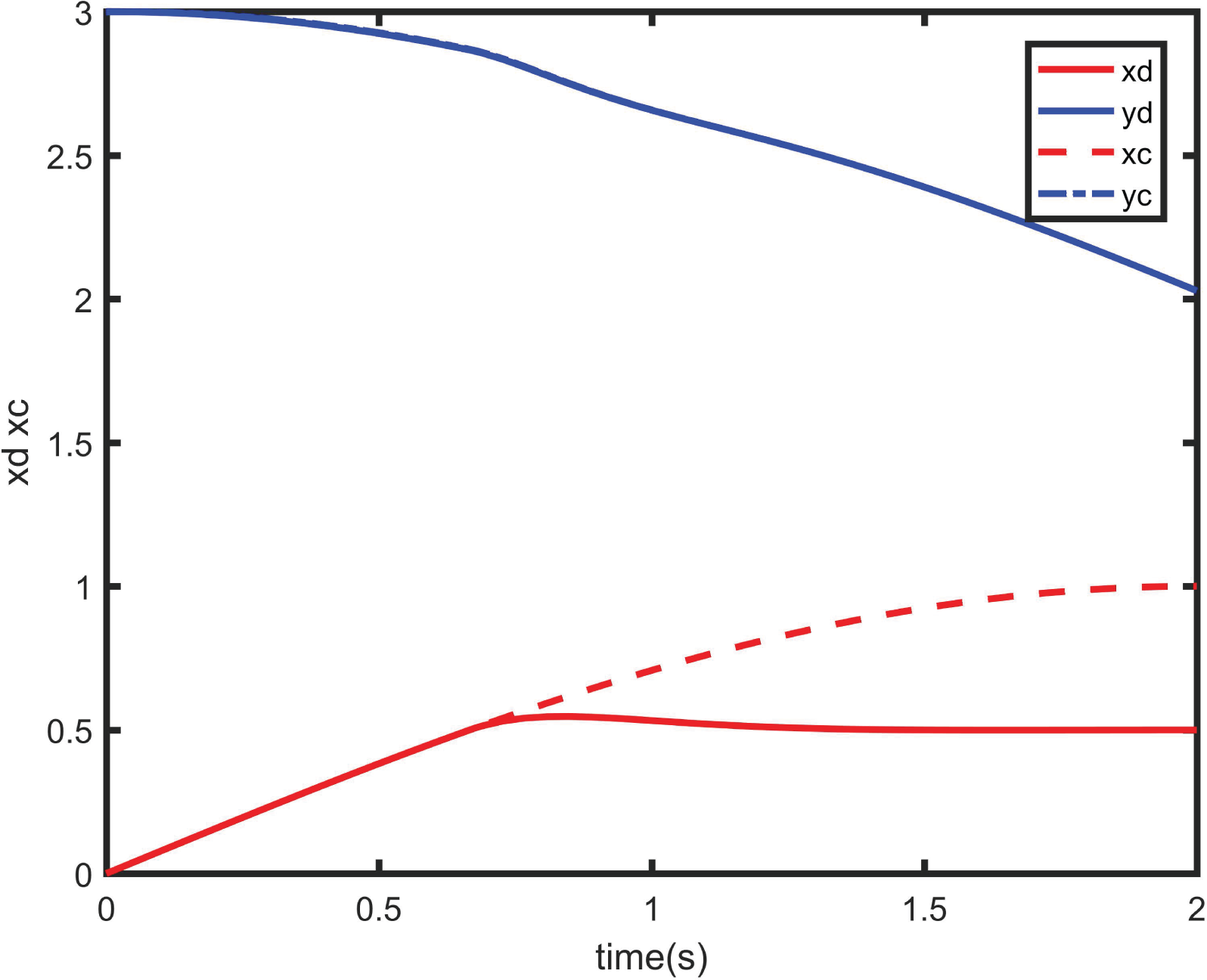
Figure 7 shows the position tracking effect in X and Y directions; this figure shows that the impedance mainly acts in the X-direction, which is the normal direction of the contact surface. Besides, Figure 7 implies that the external contact force begins to act on the fingertip after
Figure 8 presents the external contact force acting on fingertip, as the fingertip and the physical object begin to contact (i.e.
Desired and practical trajectories.
Through fuzzy optimization, under the condition of the extreme value of position error
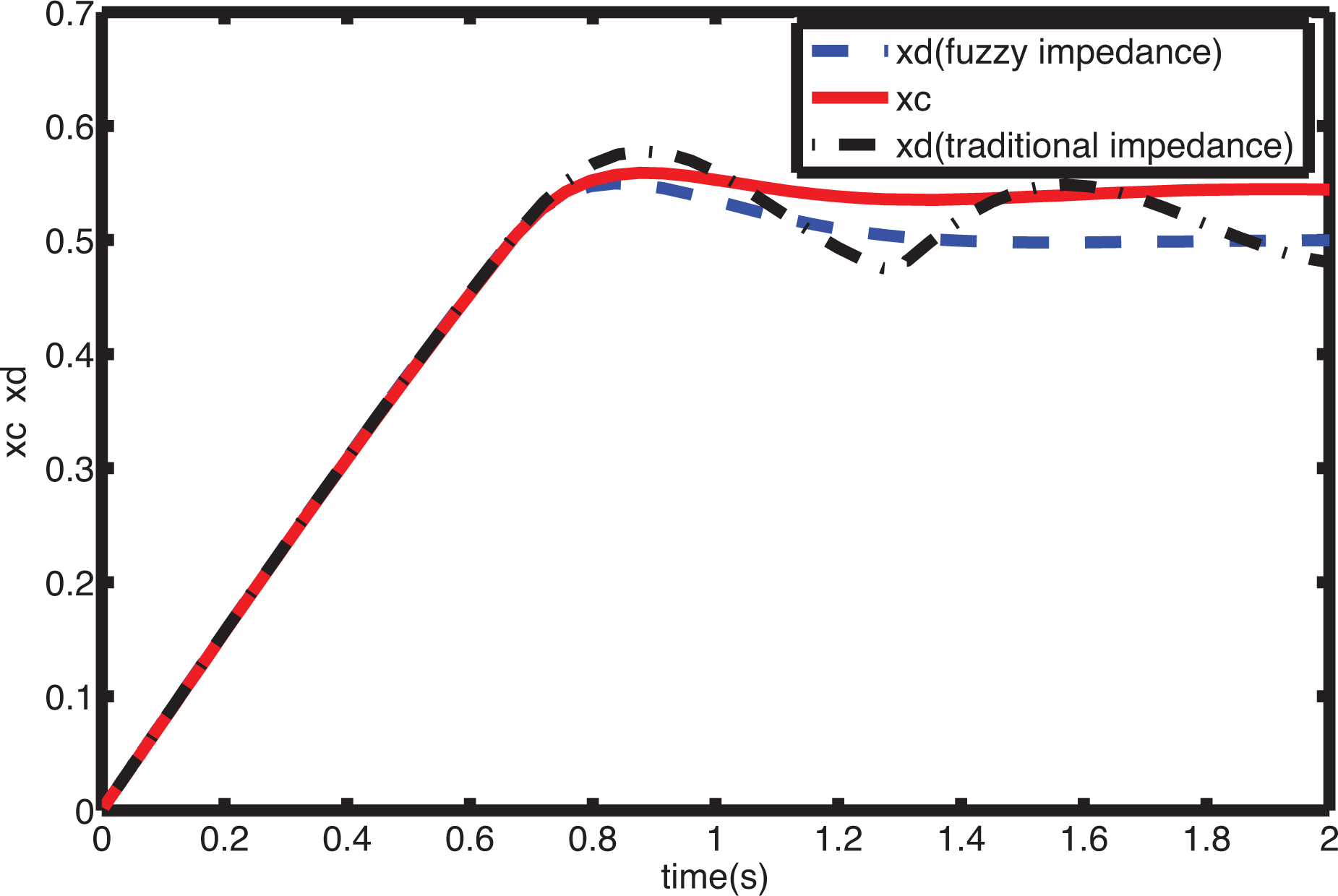
Effect of fuzzy optimization of impedance parameters.
Conclusion
By analyzing the forward and inverse kinematics of the dexterous finger, the dynamical models in joint space and Cartesian space are established for this finger, on basis of these, the proposed robust fuzzy sliding mode impedance controller can not only force the fingertip to track the desired trajectory in unconstrained space but also implement the compliance control in constrained environment, moreover, the nonlinear friction and uncertainties can be well compensated. The simulation results demonstrate the effectiveness and feasibility of our proposed control approach, in the future, the experimental verification and multi-fingered coordinated control will be further considered.
Footnotes
Author contributions
Jiufang Pei: Methodology, Formal analysis, and Writing—Original Draft.
Siyang Yang: Methodology, Review, and Editing.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was funded by the research project of 2020 Anhui Polytechnic University research program (No. Xjky2020002).