
Abstract
Several works have provided evidence of a resonant motor effect while observing a hand interacting with painful stimuli. The aim of this work is to show that participants are sensitive to the observation of an injured hand when they have to categorise an easily graspable object with their own hand. In Experiment 1, participants indicated whether or not photographs of objects (graspable or non-graspable, left or right oriented) could be grasped with their dominant hand, by tapping a key on a keyboard. Target objects were preceded by primes consisting of photographs of hands (injured vs healthy) in a grasping posture (power grasp). Experiment 2 consisted of two phases: In the first phase, participants had to categorise square or circle shapes. After their response (Group 1: tapping a key vs Group 2: constricting a hand grip), photograph of two types of hand (injured vs healthy) was displayed on the computer screen. In the second phase, participants had to indicate whether objects could be easily grasped with their dominant hand. Target objects were preceded by primes (square and circle) as shown in the first phase. Results show that response times were slower when the graspable target objects were right oriented and preceded by the photograph or a geometric shape associated with an injured hand. This response delay was accentuated in the handgrip condition. These results highlight that the view of an injured hand activates motor programme and pain mechanisms associated with participants relative to the consequences of the simulated grasping action.
According to the embodied approach to cognition (Barsalou, 2010), when we interact with an object, we code motor and sensory components required to perform the expected action (Ambrosini, Scorolli, Borghi, & Costantini, 2012; Bonfiglioli, Finocchiaro, Gesierich, Rositani, & Vescovi, 2009; Borghi, 2004, 2005; Borghi & Cimatti, 2010; Borghi & Riggio, 2009; D. Brouillet, Vagnot et al., 2015; T. Brouillet, Heurley, Martin, & Brouillet, 2010; Camus, Brouillet, & Brunel, 2016; Fischer & Zwaan, 2008; Glenberg & Gallese, 2012; Jirak, Menz, Buccino, Borghi, & Binkofski, 2010; Kent & Lamberts, 2008; Labeye, Oker, Badard, & Versace, 2008; Noë, 2004; Slotnick, 2004). Thus, the theory of event coding (Hommel, 1997, 1998, 2001, 2004, 2015; Hommel & Elsner, 2009; Hommel, Müsseler, Aschersleben, & Prinz, 2001; Prinz, 1990, 1997) proposes that perceived events (i.e., perceptual components) and action events (i.e., motor components) are integrated in a unified representation and share common neural codes. A neuroimaging study (Kühn, Keizer, Colzato, Rombouts, & Hommel, 2011) supports the evidence that repeating a response reactivates perceptive neural codes associated with the initial response. Particularly, it is the action code that triggers the perception code.
In other words, any perception of a stimulus feature reactivates the action that was associated with a previous exposure. Ideomotor theory specifies that (Badets & Rensonnet, 2015; Badets & Osiurak, 2015; Greenwald, 1970a, 1970b; James, 1890; Janczyk, Heinemann, & Pfister, 2012; Janczyk, Pfister et al., 2012; Pfister & Janczyk, 2012; Pfister et al., 2014; Pfister & Kunde, 2013; Stock & Stock, 2004) it is not the direct perception of a stimulus that triggers the corresponding action, rather the sensorimotor consequences of past similar actions (Elsner & Hommel, 2001; Kunde, 2001). In this work, we focus on the effect of negative consequences of an action, such as pain, on perception.
It is now well established that observing graspable objects evokes a specific motor response (Badets & Osiurak, 2015; Osiurak & Badets, 2014; Bub & Masson, 2010; Cisek, 2007; Decety et al., 1997; Decety et al. 1994; Osiurak & Badet, 2016; Reynaud, Lesourd, Navarro, & Osiurak, 2016; Thill, Caligiore, Borghi, Ziemke, & Baldassarre, 2013; Tucker & Ellis, 2001). Indeed, participants responded more easily with a power grip than a precision grip when observing a bottle and they responded more easily with a precision grip than a power grip when observing a pen (Ellis & Tucker, 2000). Using a priming paradigm, Borghi et al. (2007) found a compatibility effect between hand prime posture (precision vs power) and the grip required to grasp the target object (precision vs power). When the prime was a hand mimicking a precision grip action, participants responded faster and more accurately to subsequent target objects that were graspable with a precision grip (e.g., key, grape) than with a power grip (e.g., bottle, banana). When the hand mimicked a power grip action, the response was the reverse. Comparable results were observed using a video-clip of hands rather than static images (Vainio, Symes, Ellis, Tucker, & Ottoboni, 2008). These studies show that when a hand is observed in a potential interaction with an object, the processing of the object is facilitated when the required grasp is comparable with the one mimicked by the hand (Borghi & Cimatti, 2010). How far can the facilitation effect observed in a motor response exist independently of the consequences of this grasping for an individual? In other words, what happens when objects to grasp represent a danger for the people grasping them?
In a similar way, Anelli, Borghi, and Nicoletti (2012) used a priming paradigm, to show that participants are sensitive to differences in level of risk posed by an object (i.e., neutral vs dangerous). In their study, participants were required to decide as quickly as possible whether the target-stimulus was an artefact or a natural object. All of the objects were power graspable with half neutral objects (e.g., bulb, tomato) and the other half dangerous objects (e.g., broken glass, cactus). Each target object was primed by a human hand or a robotic hand mimicking a power grip action, a static hand, or a control stimulus. Results showed an interference effect: responses were faster when the object was neutral and slower when the stimuli were dangerous. Moreover, positive correlation was observed between the calculated interference index and the calculated facilitation index of the grasping hand: the higher was the motor resonance evoked by biological hands, and the stronger was the interference obtained with dangerous objects. These results were confirmed in an additional study of Anelli, Nicoletti, Bolzani, and Borghi (2013), where they showed that sensitivity to object dangerousness is maintained across one’s lifespan.
These results extend those suggesting a resonant activation of pain representations in the onlooker’s sensorimotor system (Avenanti, Bolognini, Maravita, & Aglioti, 2007; Avenanti, Bueti, Galati, & Aglioti, 2005; Avenanti, Candidi, & Urgesi, 2013; Avenanti, Minio-Paluello, Sforza, & Aglioti, 2009; Avenanti, Paluello, Bufalari, & Aglioti, 2006; Vicario, Rafal & Avenanti, 2015). For example, after watching a needle penetrating the first dorsal interosseous muscle at the dorsal surface of the right hand between the thumb and the index finger, a selective inhibition was registered. It was observed that the motor evoked potential amplitude decreases drastically for the part of the body involved (the hand and not the foot) and specifically for the muscle involved. For example, observing a video of a hypodermic needle pricking the fingertip slowed down approach movements compared with observing a cotton bud (see the works of Morrison, Perini, & Dunham, 2013; Morrison, Poliakoff, Gordon, & Downing, 2007; Morrison, Tipper, Fenton-Adams, & Bach, 2013)
To sum up, the studies mentioned above provide evidence of a resonant motor effect while observing hands interacting with painful stimuli. This pain could have been induced by the observed object (the needle) or by the action preparation (gripping a dangerous object). What would happen if it was the association between the observed body state and the action to be performed that carried pain? According to Merleau-Ponty (1945/1962), pain is a subjective experience of a highly unpleasant physical sensation caused by injury.
For example, imagine that you have just tapped a hammer on a chisel for several minutes to make a hole in a wall. In everyday life, your main activity is to type on a computer keyboard. Most probably, you will have blisters on your hands, breaking out and causing you severe pain. As the hole is now made and you must use a trowel to seal a piton. Normally, handling a trowel is an automatic action, but now, the pain induced by the blisters causes you to mobilise your attention as well as perceiving the action differently. Will you grasp it? Probably not, because you are going to anticipate the pain induced by grasping.
Particularly, the aim of this work is to answer following question: When observing an injured hand on a computer screen in a coherent potential interaction (e.g., mimicking a power grip action) with an object (e.g., a trowel), is the slowing down observed by Anelli et al. (2012) with dangerous objects, still present? In an attempt to address this question, we hypothesised that the idea of an associated pain to the grasping of a tool with an injured hand will result in a slowdown of the categorisation of this tool (Experiment 1), especially if the response device involves making a grasp similar to the one used for grasping a tool (Experiment 2). Moreover, according to the Body-Specificity Hypothesis (Casasanto, 2009; Willems, Toni, Hagoort, & Casasanto, 2009), we expect a handedness effect: The slowdown will be more accentuated with the dominant hand than the non-dominant hand.
Our first experiment was based on the paradigm of Borghi et al. (2007). Participants had to indicate if an object (either oriented towards the left or right) could be easily grasped with their dominant hand in real life by tapping a key on a keyboard, for graspable objects (e.g., a trowel) and non-graspable objects (e.g., a truck). Then, target objects were preceded by a photograph of a right hand (injured vs healthy) in a power grasping posture. We expected longest reaction times to categorise right-oriented graspable objects than left-oriented graspable objects after an injured hand prime.
To discern whether the slowdown observed for the right-oriented graspable objects primed with an injured hand was caused by anticipating the consequences of the action (i.e., pain) rather than the perception of the injured hand itself, we conducted a second experiment. The latter was based on the paradigm of Brunel, Labeye, Lesourd, and Versace (2009). During the first phase, participants categorised geometric shapes: square versus circle by pressing a key on a keyboard (Group 1) or constricting a handgrip (Group 2). The use of a handgrip in our experiment allowed a real-life comparison of processes that are implemented in the grasping of tools. Following participants’ responses, we then displayed the photograph of a right hand (injured vs healthy), in a power grasping posture on a computer screen. We assumed that for each group, the geometric shapes would be associated with an injured or a healthy hand but also with a response type different from that for grasping a tool (i.e., pressing a key) or similar to that for grasping a tool (i.e., constricting a hand grip). In the second phase, the shapes of the first phase (square or circle) primed target objects. The rest of the procedure was the same as for Experiment 1. We expected longest reaction times to categorise right-oriented graspable objects for Group 2 than Group 1 when the geometric priming shape was associated with the constricting response and the injured hand.
Experiment 1
Method
Participants
A total of 20 volunteer students took part in this experiment (14 women and six men). The age of the participants ranged from 22 to 26 years (M = 24 years; standard deviation [SD] = 2.03). They were all native French speakers, with normal or corrected to normal vision, and were right-handed. Participants gave written informed consent prior to participation. Our laboratory Ethical Committee approved the study.
Materials
We used 16 photographs of tools graspable with one hand and with a power grip (Ax, Brush, Chopper, Dustpan, File, Hammer, Paintbrush, Pincers, Pliers, Saw, Scissor, Screwdriver, Spatula, Sickle, Torch, Trowel) and 16 photographs of non-graspable objects (Bulldozer, Bus, Camping car, Canoe, Caravan, Crane, Cruise ship, Helicopter, Motorbike, Plane, Car, Scooter, Space rocket, Tractor, Train, Truck).
All of the photographs were replicated in two sets: Tool photographs relative to graspable tools had, on one side the handle oriented to the left and on the other hand oriented to the right. As for photographs of the non-graspable objects, they were also either oriented to right or to the left. All of the pictures were resized at 640 × 480 pixels.
The photographs were gathered using Google image®. To rule out any confusion in the selected photographs, they were pre-tested by 50 independent subjects. They were asked to name the photographs and indicate whether the real objects represented on photographs were easily graspable with a power grip using their dominant hand. All the pictures used in the study were similarly named by 100% of the judges. In total, 100% of the graspable photographs were evaluated as graspable and 100% of the non-graspable photographs were evaluated as non-graspable. During the experiment, objects were shown in real colour on a white background.
We also included two photographs of the same right hand in a grasping posture (power). In one picture, the hand was injured (i.e., bandaged and bloody) and in the other picture, the hand was healthy. Altogether, the material consisted of 32 graspable objects (16 tools oriented to the right and 16 tools oriented to the left) and 32 non-graspable objects (16 oriented to the right and 16 oriented to the left). Half of each category of objects (i.e., tools oriented to the right, tools oriented to the left, non-graspable objects oriented to the right, non-graspable objects oriented to the left) was primed by a healthy hand and the other half by an injured hand. The experiment was conducted on a Sony Vaio laptop computer (screen size: 15.5 in; screen resolution: 1366 × 768 pixels; refresh rate: 60 Hz; Azeroth: 144 frames per second) programmed and run using E-prime software (Schneider, Eschman, & Zuccolotto, 2002).
Procedure
The procedure was similar to that used by Borghi et al. (2007). Participants were seated 60 cm from the computer screen. They were tested individually in an isolated room by a single experimenter. Each experimental session started with a brief description of the task to be performed; after which, the participant provided written consent to prior to the participation.
First, a fixation cross was programmed for 500 ms followed by one of the two hand photographs that was programmed at the centre of the screen for 600 ms. Then, a blank screen was programmed during 150 ms followed by the photograph of one of the objects (i.e., a tool or a non-graspable object). All possible combinations of the two variables were randomised between participants.
Participants had to decide as quickly and accurately as possible if the object presented on the screen was easily graspable or non-graspable with one hand in real life. Moreover, each participant was told that if they considered any of the object as non-graspable, they should not respond (No-Go condition). The exposure time of non-graspable objects was programmed for 800 ms on the screen and if participants responded during this time, it was recorded as an error (i.e., the errors analysed below). If, on the contrary, participants considered that the object was graspable (Go condition), they had to press with their right index finger on a designated key (i.e., H) on the keyboard. The graspable objects remained on the screen until the participants responded, but if participants did not respond after 1500 ms, the next trial started. A non-response to the object was counted as an error (these errors were not analysed because they were too few). The key was in the median axis of the computer, therefore in front of the participant. The inter-trial interval time was fixed to 1500 ms.
In summary, there were three sources of variation: the nature of the hand (i.e., injured vs healthy), the orientation of the tools (i.e., left vs right), and the type of the objects (i.e., graspable vs non-graspable) manipulated within participants. All other variations were controlled variables.
Results
We performed two types of analysis. First, errors for non-graspable objects (i.e., giving an answer while no answer was expected, No-Go) were analysed. Then, we analysed the response times for tools merely because the error rate (i.e., answer after 1500 ms) was very low (0.009%). The error time was not included in the analysis.
For the non-graspable objects, we performed a Wilcoxon test on the mean error rates concerning the nature of the hand and for the orientation of the objects. We found no significant effect between the nature of the hand: healthy = 2.1%, injured = 1.93%, z = .00, p = 1.00; orientation of the tools: left = 1.81%, right = 2.1%, z = .73, p = .46; the interaction was not significant: analysis of variance (ANOVA) χ2 (20,3) = 5.66, p = .12.
For the tools, we conducted an ANOVA with Statistica Software (Statistica 8). In addition, we calculated the Bayes factor (BF1.0), which is the ratio of p(D∣H1), the probability of observing the data under the alternative hypothesis, and p (D∣H0), the probability to observe the data under the null hypothesis. The Bayes factor is a measure of the probability that the data fit to the alternative hypothesis rather than the null hypothesis (Rouder, Speckman, Sun, Morey, & Iverson, 2009). Bayes factors were calculated using the JASP software (Love et al., 2015). BFs between 3 and 10, 10 and 30, or >100, respectively, indicate moderate, strong, or decisive evidence for alternative hypothesis (Jeffreys, 1961).
Results (see Table 1, Figure 1) showed first of all, an effect of the orientation (right oriented −101 ms), F(1, 19) = 89.32, p = 1.29−08,
Mean response time (ms) according to the orientation of tools and the nature of the hand as prime.
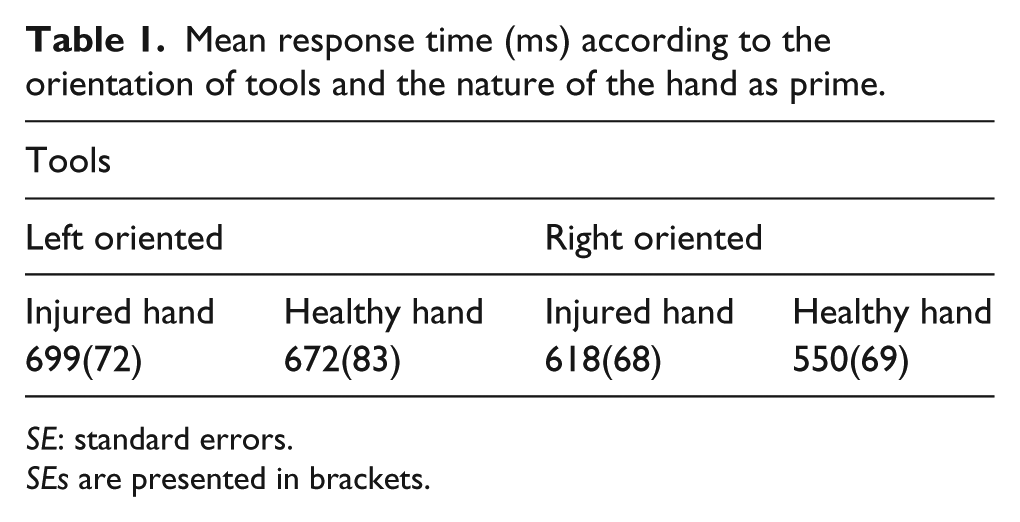
SE: standard errors.
SEs are presented in brackets.
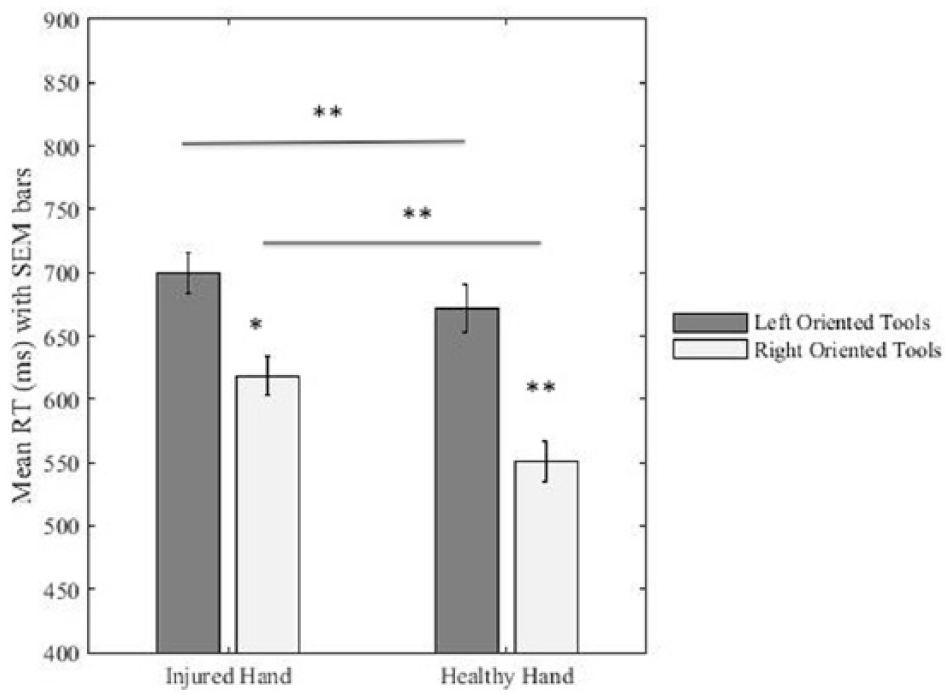
Mean response time (ms) according to the orientation of tools and the nature of the hand as prime.
Discussion
These results extend those of Anelli et al. (2012): participants are not only sensitive to the risk posed by an object, they are also sensitive to the consequences of an action performed with an injured hand. Moreover, they bring additional data: the categorisation of the tools is influenced by the congruence between the laterality of the hand (i.e., right) and the orientation of the objects (i.e., right).
Nevertheless, if these results highlight that seeing a photograph of an injured hand with a posture suitable for the gripping of the tool (i.e., hand as prime) leads to slower responses for tool categorisation, they do not disentangle whether the slowdown is due to the anticipated sensory consequences (i.e., pain) of grasping a tool with an injured hand or the injured hand itself.
To demonstrate that it was the idea of the pain associated with the consequences of the simulated grasping action and its consequences, and not the perception of the injured hand that explain these results, we conducted a second experiment in which the primes would activate both an action and its consequences. We used geometric shapes as primes (i.e., circle vs square) coloured in grey because they do not activate a priori, cognitions about tools or hands. The goal of the first phase was to create an association of the geometric shapes with a specific action and its consequence. The second phase was to test the effect of the response mode (i.e., pressing a key vs constricting a hand grip) to categorise graspable objects primed by the geometric shapes.
Experiment 2
Method
Participants
A total of 40 volunteer students, different from those in Experiment 1, participated in this experiment. It was ensured that the number of women and men in both groups as well as the average age was the same. They were randomly assigned to the two conditions (i.e., response keyboard vs response hand grip). Each group consisted of 16 women and four men. The age of the participants ranged from 21 to 24 years (M = 23 years; SD = 1.97); all were native French speakers, had normal or corrected to normal vision, and were right-handed. Participants gave written informed consent prior to participation. Our laboratory Ethical Committee approved the study.
Materials
The materials used were the same as in Experiment 1, except we added two geometric shapes, a grey circle and a square, of the same sizes as the objects used. Moreover, one group used a Hand Power Grip Exerciser (https://www.amazon.co.uk/CellDeal-Exerciser-Strength-Training-Adjustable) whose clamping force was reduced to 500 g. Each arm contained a contactor connected to the makeymakey interface (http://makeymakey.com), itself connected to the computer. When the participants clamped the arms, both contactors came in contact and the time was recorded as if a key of the keyboard had been pressed.
The experiment was conducted on a Sony Vaio laptop computer (screen size: 15.5 in; screen resolution: 1366 × 768 pixels; refresh rate: 60 Hz; Azeroth: 144 frames per second) programmed and run using E-prime software (Schneider et al., 2002).
Procedure
Participants were seated 60 cm from the computer screen. They were tested individually in an isolated room by a single experimenter. Each experimental session started with a brief description of the task to be performed after which the participant provided consent to participate. After written consent had been provided, the experiment started.
Similar to Brunel et al. (2009), the experiment consisted of two phases: a learning phase and a short-term priming phase. Participants were told that there were two phases. The aim of the learning phase, not explicitly formulated by the experimenter, was that participants should associate one of the two geometric shapes (i.e., circle vs square) with a response mode (pressing a key vs constricting a hand grip) and one of the two hands (i.e., injured vs healthy). Each trial started with a fixation cross, programmed in the centre of the screen to 500 ms. Then, a geometric shape appeared on the centre of the screen. Half of the participants indicated their response by pressing with their right index finger the designated key (i.e., H) on the keyboard (Keyboard Group [KB], N = 20). The other half responded by grasping a hand grip (Hand Grip Group [HG], N = 20) with their right hand. Regardless of the group, participants were told that their task was to judge, as quickly and accurately as possible, whether the geometric shape was a square or a circle. In each group, half of the participants (i.e., N = 10) were instructed not to respond when the geometric shape was a square (No-Go), but they had to respond when the geometric shape was a circle (Go). For the other half (i.e., N = 10), it was the contrary (i.e., respond to the square and not respond to the circle). For the Go situation, the shapes remained on the screen until the participants responded, and when they responded, a photograph of a hand (injured or healthy) appeared immediately after the response. For the No-Go situation, the programmed exposure time of the shapes was 500 ms and a photograph of a hand (injured or healthy) appeared immediately after. Photographs of injured or healthy hands simulating the consequences of the action performed were programmed to remain for 600 ms. The inter-trial interval was programmed for a period of 1500 ms. Each geometric shape, and consequently, each hand, was presented 40 times in a random order. After the 40th trial, a screen appeared indicating that the learning phase was over. Another screen appeared programmed after 1500 ms indicating that the second phase had started.
The second phase started with a fixation cross programmed in the centre of the screen for 500 ms. Then, one of the two geometric shapes (i.e., the circle or the square) presented during the learning phase (i.e., prime) was displayed on the screen (the exposure time was programmed to 600 ms) followed by a blank screen programmed for 200 ms, followed by the photographs of an object (i.e., a tool or non-graspable object). Geometric shapes and objects were randomised between participants.
Participants had to decide as rapidly and accurately as possible if the objects were easily graspable or non-graspable with one hand in real life. Participants were told that if they considered that the object was non-graspable, they should not respond (No-Go). The exposure time of non-graspable objects was programmed for 800 ms on the screen, and if participants responded during this time, it was recorded as an error (i.e., the errors analysed below). If they considered that the objects were graspable (Go), the KB had to press, with the index of their right hand, a designated key (i.e., H) and the HG had to grasp the hand grip with their right hand. The graspable objects remained until the participants responded, but if after the programmed time (i.e., 1500 ms) participants did not respond, a next trial started and non-response on the object was counted as an error (these errors were not analysed because they were too few). The programmed inter-trial interval was 1500 ms.
In summary, there were three sources of variation: the geometric shape (i.e., associated with a hand healthy vs injured) manipulated within participants, the orientation of the tools (i.e., left vs right) manipulated within participants, and the response mode (i.e., keyboard vs hand grip) manipulated between participants. All other variations were controlled variables.
Results
Learning phase
For the No-Go situation, we performed a Wilcoxon test on the mean number of errors. We found no significant effect between the two different shapes for each group (mean number of errors: KB group, square = 0.81%, circle = 0.84%, z = .73, p = .46; HG group, square = 0.89%, circle = 0.86%, z = .72, p = .48). A Mann–Whitney test shows no difference between the groups: for square (z = .37, p = .70) and for circle (z = .13, p = .89). These results show that participants performed the task accurately.
For the Go situation, as participants made no mistake (they responded when it was a square and did not respond when it was a circle versus they responded when it was a circle and did not respond when it was a square), we performed an ANOVA on the latencies for the two different shapes and the two groups. We found no significant effect between the two shapes (square = 456 ms, circle = 425 ms, F(1, 38) = 2.50, p = .12,
Test phase
We performed two types of analysis. We analysed the errors for non-graspable objects (i.e., giving an answer while no answer was expected, No-Go). We analysed only the response times for tools because the error rate (i.e., answer after 1,500 ms) was very low (0.008%).
For the non-graspable objects, and for each group, we performed a Wilcoxon test on the error rates for the nature of the shape and for the orientation of the tools. We found no significant effect: KB (nature of the shape: healthy = 1.93%, injured = 1.93%, z = .00, p = 1.00; orientation of the tools: left = 1.82%, right = 2.10%, z = .80, p = .42), HG (nature of the shape: healthy = 2.00%, injured = 1.93%, z = .00, p = 1.00; orientation of the tools: left = 1.87%, right = 2.06%, z = .00, p = 1.00).
For the tools, we conducted an ANOVA with Statistica Software (Statistica 8). In addition, we calculated the Bayes factor (BF1.0) using the JASP software (Love et al., 2015). BFs between 3 and 10, 10 and 30, or >100, respectively, indicate moderate, strong, or decisive evidence for alternative hypothesis (Jeffreys, 1961).
Results showed (Table 2, Figure 2) (a) an effect of response mode (keyboard −50 ms), F(1, 38) = 6.31, p = .016,
Mean response times (ms) according to the orientation of tools, the nature of the shape as prime, and the response mode.
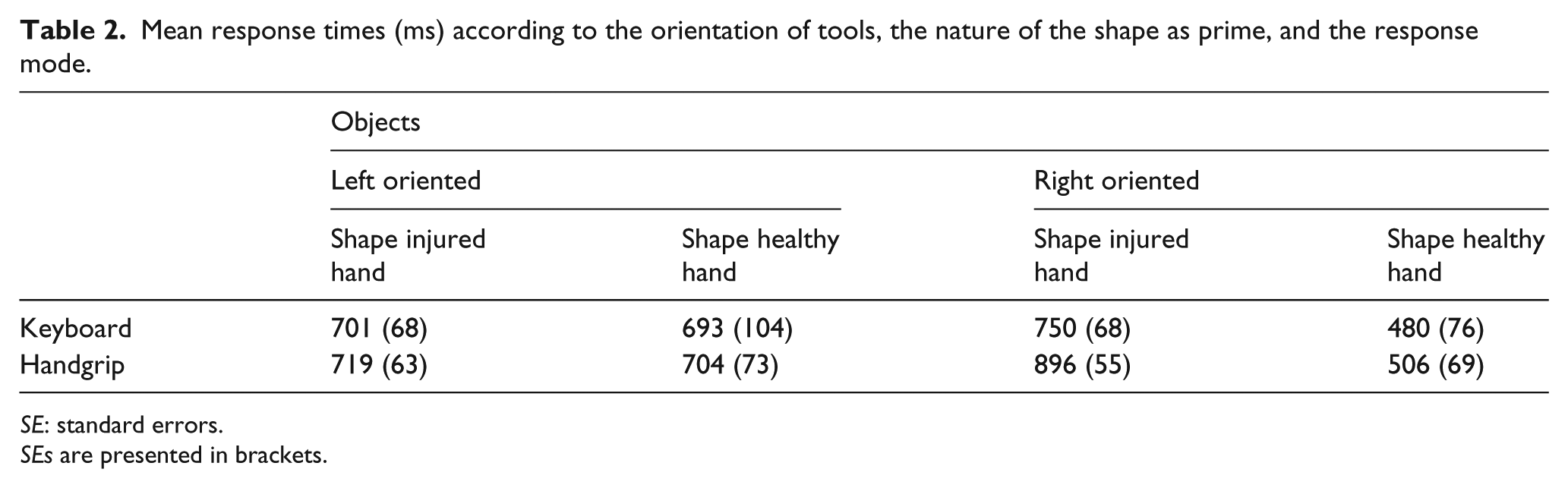
SE: standard errors.
SEs are presented in brackets.
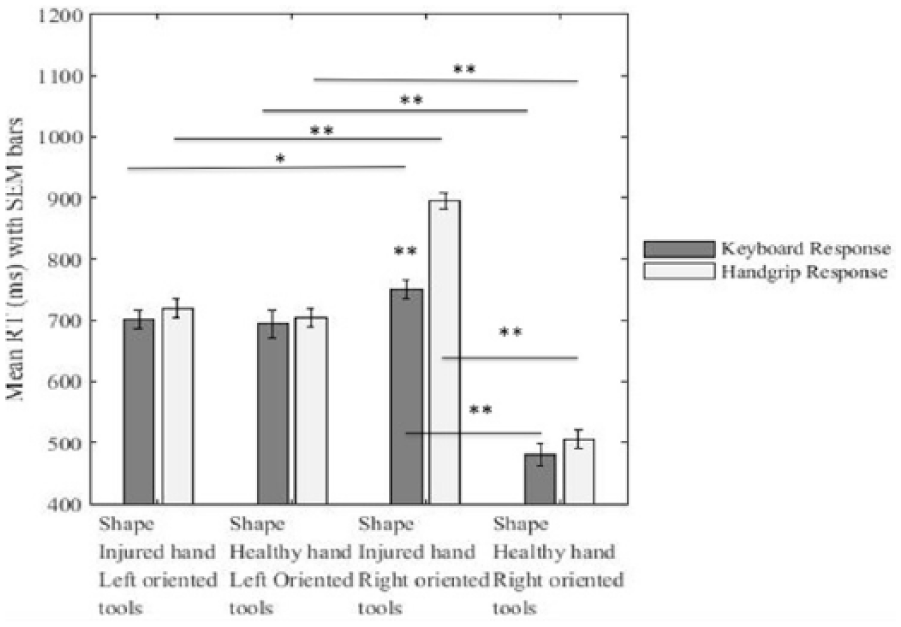
Mean response times (ms) according to the orientation of tools, the nature of the shape as prime, and the response mode.
The interaction between orientation of the tools and the response mode was significant, F(1, 38) = 22.59, p = 2.86−05,
The interaction between the nature of the shape and response mode was significant, F(1, 38) = 28.22, p = 4.98−06,
The interaction between the orientation of the tools and nature of the shape was significant, F(1, 38) = 539.60, p = 4.67−24,
The three-way interaction (i.e., response mode × orientation of the tools × nature of the shape), was significant, F(1, 38) = 16.4, p = .0002,
The analysis of responses with the keyboard showed that response times were faster when tools were oriented to the right (615 ms) than to the left (697 ms), F(1, 19) = 74.21, p = 5.48−08,
The analysis of response with the handgrip showed that the orientation of the tools was not significant, F(1, 19) = 0.88, p = .36,
The analysis of left-oriented tools shows no significant difference for the nature of the shape (710 vs 698 ms), F(1, 19) = 0.99, p = .32,
The analysis of right-oriented tools showed that response times were faster for healthy shape (493 ms) than for injured shape (823 ms), F(1, 19) = 3,365.1, p = 7.53−23,
To summarise, these analyses highlighted that it was only for tools oriented to the right that the response mode and the nature of the shape modulate response times. Moreover, if the shape associated with injured hand slow the response times, whatever the response mode, it was when the participants responded with the handgrip that the response times was the slowest.
Discussion
The results show that the learning phase led participants to integrate the visual shape with the action and its consequence (i.e., photograph of a healthy vs injured hand) in a common representation. As the consequence, the shape prime has been able to influence the categorisation of the objects during the test phase. More precisely, when a shape was associated with an injured hand, participants categorised the objects more slowly. However, this finding was observed only when the objects were right-oriented, and this effect was more accentuated when participants had to respond with the hand grip that simulated an action identical to those made in real life when we grasp a tool.
Overall, these results support the idea that during the presentation of the graspable tools primed by a shape associated with a specific action and its consequence, participants activated the corresponding motor programme and the pain associated with a grasping response.
General discussion
It is now well established that it is not the direct perception of a stimulus that triggers the corresponding action, but rather the sensorimotor consequences of such past actions (Hommel, 2001, 2004, 2015; Kunde, 2001; Kunde, Reuss & Kiesel, 2012). In several works, the consequences of actions were considered in respect to the perceptual consequences on objects and very few for body consequences of the action (see Anelli et al., 2012). In this study, our main focus was to provide an evident answer to the following question: when observing an injured hand in coherent potential interaction (i.e., mimicking a power grip action) with an object (e.g., a trowel), is the facilitation effect (Borghi et al., 2007) still observed? Specifically, are participants sensitive to an observed body state and the pain associated when they perform an action?
Regarding the first experiment, our results showed that the categorisation of a right-oriented tool was slower when primed with an injured hand mimicking a coherent grip action than a healthy hand.
These results support the idea that when right-oriented tools primed by an injured hand were presented, participants activated the corresponding motor programme and the pain associated with the consequences of the simulated grasping action. Nonetheless, one could argue that it was the perception of the injured hand itself which explains the results and not the simulated grasping action and its consequence. Hence, we carried out a second experiment to decide between these two possibilities. To this end, geometric shapes (squares and circles), which a priori do not activate cognitions about tools or hands, were associated with a first phase with an action (i.e., press vs constrict) and its consequence (i.e., injured or healthy hand mimicking a power grip). The second phase was to test the effect of the response mode (i.e., pressing a key vs constricting a hand grip) to categorise graspable objects primed by the geometric shapes. Results showed that the presentation of a geometric shape associated with a constricting action (i.e., power grip) and injured hand, before the occurrence of a tool, slowed its categorisation more than a geometric shape associated with a pressing action and injured hand (i.e., simulated action). These results support the idea that when a tool was displayed on the screen, participants activated the corresponding motor programme and the pain associated with the consequences of the simulated grasping action. As it was the same pattern of results observed in Experiment 1, one can argue that it was the same mechanism that operated in the two experiments. Interestingly, when showing a graspable tool primed with an injured hand mimicking the grasp, participants anticipated the additional pain they would experience if they grasped it.
The idea that it is the motor programme and the associated pain which trigger the slowdown of the categorisation is supported not only by the presence of a prime associated with the injured hand but also by the congruence between the laterality of the hand (i.e., right) and the orientation of the tools. Indeed, in the two experiments, we can observe that the nature of the hand (healthy vs injured) had no effect on the tools oriented to the left. We can suppose that as the participants were all right-handed and responded with their right hands, grasping a tool oriented to the left presented a great difficulty such that the nature (injured or healthy) of the hand would be inconsequential. In contrast, when the tools were oriented to the right, an effect of the nature of the hand was observed. In this configuration, when an injured hand was shown or evoked, participants activated consequent sensorimotor components of the action (i.e., pain) that were coded in past. However, we consider that results observed with the use of a hand grip as response that validates the idea of an association between the motor programme and the pain triggering the corresponding behaviour. Indeed, the effect of the evocation of the injured hand with geometric shapes and the effect of the orientation of the tools increased when participants used a hand grip. Therefore, if grasping a hand grip activates motor programmes similar to those activated when pressing a key on a keyboard, the effects (i.e., pain) of observing an injured hand should also be accentuated with the hand grip. Indeed, the negative effect of the observed body state was stronger when participants executed a congruent action (e.g., a power grip) rather than just simulating such an action (as in the keyboard condition). So, the activation of sensorimotor consequences that such an action has in the past is more salient; “the additional pain is more present with the hand grip than with the keyboard.” To summarise, when a handgrip is used, the salience of stimulus affordance is increased leading to a stronger effect to injured hand.
At last, our results extend those of Anelli et al. (2012), which showed that participants are sensitive to the risk posed by an object to be grasped. Indeed, our results suggest that participants are also sensitive to the observed body-state when they perform an action. As a result, they are sensitive to the consequences of the action performed when this action had been performed with an injured hand. Even if an object poses no risk, the action performed to grasp it can generate a risk and change our perceptions and our behaviour (see D. Brouillet, Milhau, & Brouillet, 2015).
More generally, our results support previous findings that a resonant motor effect arises while observing pain (Anelli et al., 2012; Anelli, Nicoletti et al., et al., 2013; Anelli, Ranzini et al., 2013; Avenanti et al., 2007; Avenanti et al., 2005; Avenanti et al., 2013; Avenanti et al., 2009; Avenanti et al., 2006; Morrison, Perini, & Dunham, 2013; Morrison et al., 2007; Morrison et al., 2013; Vicario et al., 2015; Badet & Osiurak, 2015). If pain is intimately associated with the motor system, then that could be explained by the necessity to avoid a certain behaviour when a pain is sensed, such as to preserve the survival of the person. Consequently, future research should be conducted to investigate whether observing an injured hand will modulate the upcoming force to hold the object. Indeed, according to internal forward models (see Flanagan, Bowman, & Johansson, 2006; Wolpert & Flanagan, 2001), we use an efference copy of the motor command to anticipate the upcoming force to hold the object and not let it fall.
Finally, our results are in line with the dual competition framework, proposed by Pessoa (2009). Indeed, according to this dual competition framework, emotions can either improve or impair behavioural performance, depending on how they interact with executive control function (e.g., inhibition). Moreover, the effect of emotion on cognitive processing depends on the intensity of the affective information: stimuli of moderate intensity enhance behavioural performance while stimuli of high intensity impair task performance. Pessoa, Padmala, Kenzer, and Bauer (2012) and Kalanthroff, Cohen, and Henik (2013) showed that this impairment resulted from the competition with cognitive control. Moreover, cognitive control is essential when the task, as go/no-go task (the task used in Experiment 2), requires great cognitive resources (see Shackman, Maxwell, McMenamin, Greischar, & Davidson, 2011). Anyway, emotional stimuli have effects only when they are relevant for the task (Pessoa, 2009, 2013). In our case, the shape associated with an injured hand slows the response of the participants only when the tools are easily graspable (i.e., right oriented) for a right-hander and this slowing down is accentuated when the grasp of the response device (i.e., handgrip) is similar to the tool.
Supplemental Material
QJE-STD-17-357.R2-Supplementary_Material – Supplemental material for How does simulation of an observed external body state influence categorisation of an easily graspable object?
Supplemental material, QJE-STD-17-357.R2-Supplementary_Material for How does simulation of an observed external body state influence categorisation of an easily graspable object? by Denis Brouillet, Arthur-Henri Michalland, Ronan Guerineau, Mooruth Draushika and Guillaume Thebault in Quarterly Journal of Experimental Psychology
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.