
Abstract
This study compares wrist motion, biomechanical behaviour and radiographic parameters before and after total wrist arthroplasty using a fourth-generation spherical articulation prosthesis. A total of 10 cadaveric specimens were assessed using a hexapod Stewart platform robot. After arthroplasty, there were significant increases in both stiffness and phase angle of wrist motion across all planes of motion assessed. In three specimens, a sudden increase in moment was observed on load/displacement curves. Radiographically, carpal height increased by 14%, and the centre of rotation was displaced 11.1 mm proximally, 4.6 mm dorsally and 3.9 mm radially. This stretched the musculotendinous units, tightening the joint, while increasing the moment arm of the wrist flexors and decreasing the moment arm of the extensors, potentially important in the development of postoperative flexion contractures. Possible alterations in technique and/or implant design are considered to assist surgeons in achieving optimal clinical and survivorship outcomes.
Introduction
The wrist has traditionally been considered to function in flexion/extension (FE) and radioulnar deviation (RUD). However, the dart throwers motion (DTM), from radial extension through to ulna flexion, first described over 30 years ago by Palmer et al. (1985), is now widely recognized for its functional importance in activities such as throwing, hammering and even writing. It is perhaps this unique motion that has presented our species with an evolutionary advantage over others (Rohde et al., 2010). Kane et al. (2018) demonstrated that volunteers who had their wrist splinted to simulate fusion were unable to hammer a nail with any accuracy and fatigued much more quickly than those without a splint. This limitation highlights the functional importance of the DTM (Weiss et al., 1995).
Measurement of wrist circumduction highlights an oblique orientation of motion in the DTM axis (Moritomo et al., 2006; Singh et al., 2015). The centre of rotation (COR) of the normal wrist is located within the proximal head of the capitate but migrates distally by 5–10 mm during both radial and ulnar deviation, as well as anteriorly in flexion and dorsally in extension (Kaufmann et al., 2005, 2006; Neu et al., 2001). Understanding normal joint anatomy, biomechanics and kinematics of this complex joint is helpful when considering how the wrist might be replaced.
Wrist arthroplasty has had a checkered history and a much higher complication rate than hip or knee arthroplasty (Berber et al., 2018; Yeoh and Tourret, 2015). Differences in wrist kinematics and changes to the COR between the intact and arthroplasty wrist have been implicated in these complications (Figgie et al., 1986), and modern arthroplasty designs have evolved to overcome these challenges.
The use of total wrist arthroplasty is increasing. In Australia, for example, there has been a sixfold increase in the use of wrist arthroplasty between 2008 and 2022 with the spherically articulating Motec wrist arthroplasty (Motec Wrist Joint Prosthesis; Swemac, Linköping, Sweden) representing 97.4% of implants (76/78) (Australian Orthopaedic Association National Joint Registry). Early to medium-term results for these implants have been promising (Krukhaug et al., 2011; Reigstad et al., 2017) and a recent systematic review (Zijlker et al., 2021) of modern fourth-generation total wrist arthroplasty found it to have the highest survival rate at 10-year follow-up.
There is a paucity of biomechanical studies assessing wrist motion after arthroplasty. These studies have used finite element analysis (Bajuri et al., 2013; Gislason et al., 2017), electromagnetic tracking (Hooke et al., 2015) or biplane videoradiography (Akhbari et al., 2020); however, none are able to measure changes in wrist stiffness, efficiency (energy required) or biomechanical response to motion under load. There are no biomechanical studies assessing fourth-generation spherical articulation wrist arthroplasty. The use of a Stewart platform (hexapod robot) has also been developed and applied to the biomechanical assessment of the wrist (Fraysse et al., 2014; Bain et al., 2015). The hexapod robot is an advanced testing system that can apply and measure translations, rotations, forces and moments to the wrist in six degrees of freedom. This technology has a level of accuracy to within 0.04° and a sophisticated control system, which allows the wrist to be moved in any direction, while simultaneously minimizing joint reaction forces (Ding et al., 2011).
The aim of this study was to compare the wrist motion and biomechanical behaviour before and after total wrist arthroplasty with a fourth-generation spherical articulation.
Methods
Cadaveric specimen selection
In total, 12 fresh frozen cadaver arms extending from mid-radius/ulna to fingertip were obtained from six donors, from an approved tissue supplier (ScienceCare and United Tissue Network, Phoenix, AZ, USA). Specimens were excluded if there had been prior upper limb surgery, trauma, joint disease or antibiotic-resistant infection such as MRSA. Two specimens were used for pilot studies to develop and refine the testing protocols with the remaining 10 specimens used for formal testing.
Cadaveric specimen preparation
Cadaveric specimens were thawed, and the proximal radius and ulna were cut at a length of 225 mm to the tip of the middle finger. The soft tissue around the radius/ulna and metacarpals was debrided. Specimens were potted proximally and distally in cylindrical fixation cups using polymethyl methacrylate cement (PMMA; Vertex SC Self-curing, Dentimex B.V., Zeist, Holland). An alignment device was used to ensure that the long axis of the radius was parallel to the central axis of the proximal potting cup. Distally, the specimen was aligned and potted such that the bases of the distal and proximal cups were parallel, with the metacarpophalangeal joints embedded in PMMA covered to prevent motion at this joint (Figure 1).
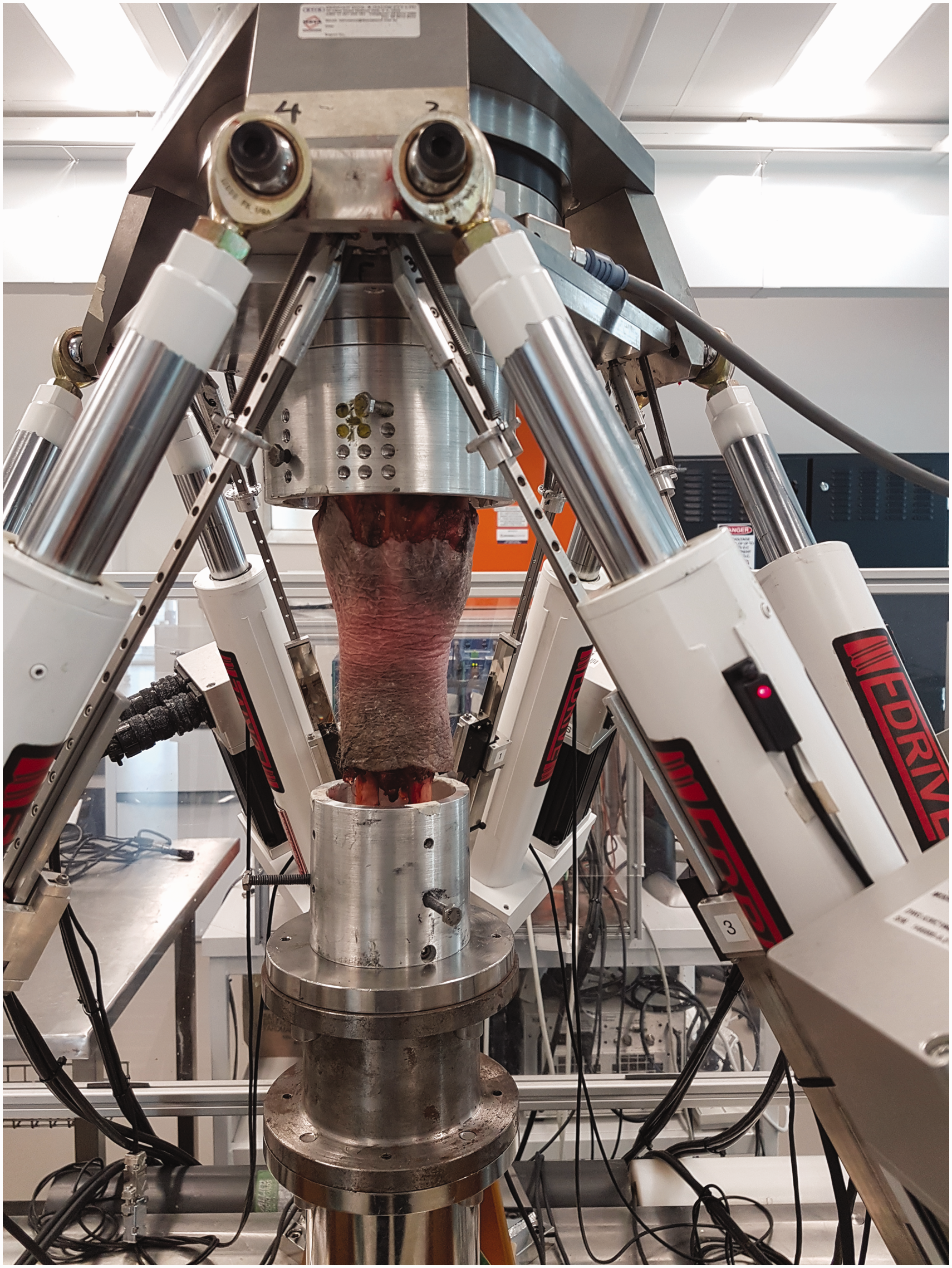
A cadaveric wrist mounted in pots with PMMA.
The potted specimens were mounted within the hexapod robot with the wrist in a neutral position. The hexapod was then programmed to apply a compressive preload of 50N through each specimen’s COR throughout testing, representing the nominal compressive force across the wrist during normal motion (Werner et al., 2010). The hexapod was instructed to perform separate flexion-extension (20° flexion to 20° extension), RUD (20° radial deviation to 20° ulnar deviation) and DTM (15° radial extension to 15° ulna flexion) testing. All tests were conducted using sine waves at 0.01 Hz for three cycles, to allow the specimen to reach a steady state response. Translations, rotations, forces and moments were recorded for each test at 2 Hz. During each test, the 50 N compressive preload was simultaneously applied while the hexapod also minimized all out-of-plane shear forces to 0 N. Between each motion tested, the wrist was returned to the neutral starting position. The sequence and method of testing were identical before and after total wrist arthroplasty.
Data analysis
The hexapod test data were all analysed using a custom MATLAB code (MATLAB R2022b; The MathWorks, Natick, MA, USA). Translations, rotations, forces and moments were recorded for each test. The third cycle was used to calculate the following outputs:
Stiffness (resistance to rotational deformation) using linear regression measured in Nm/° (Supplementary Figure 1). The phase angle measured in degrees (°) as a measure of how much energy is absorbed through the test; analogous to hysteresis energy (Supplementary Figure 1). Load-displacement summary plots were analysed to assess the biomechanical behaviour of individual specimens during testing.
Total wrist arthroplasty
All arthroplasties were performed by a single hand surgeon with level 5 expertise (Tang and Giddins, 2016) who was blinded to the study design and biomechanical testing. Procedures were performed on specimens with PMMA intact, but removed from the fixation cups, with fluoroscopy used before, during and after the procedure as per the surgeon’s normal technique. This technique followed the manufacturer’s recommendations (MOTEC wrist joint prosthesis system; Operative Technique), with the exception that the third carpometacarpal joint (CMCJ) was not prepared with an osteotomy before metacarpal implant placement. After TWA, the specimens were then relocated in the fixation cups using the pre-made threaded screw holes.
Radiographic analysis
A 30 mm calibration block was placed against the specimen to facilitate accurate measurements. Posteroanterior (PA) and lateral radiographs were performed before and after total wrist arthroplasty.
The following radiographic parameters were recorded before and after wrist arthroplasty (Figure 2):
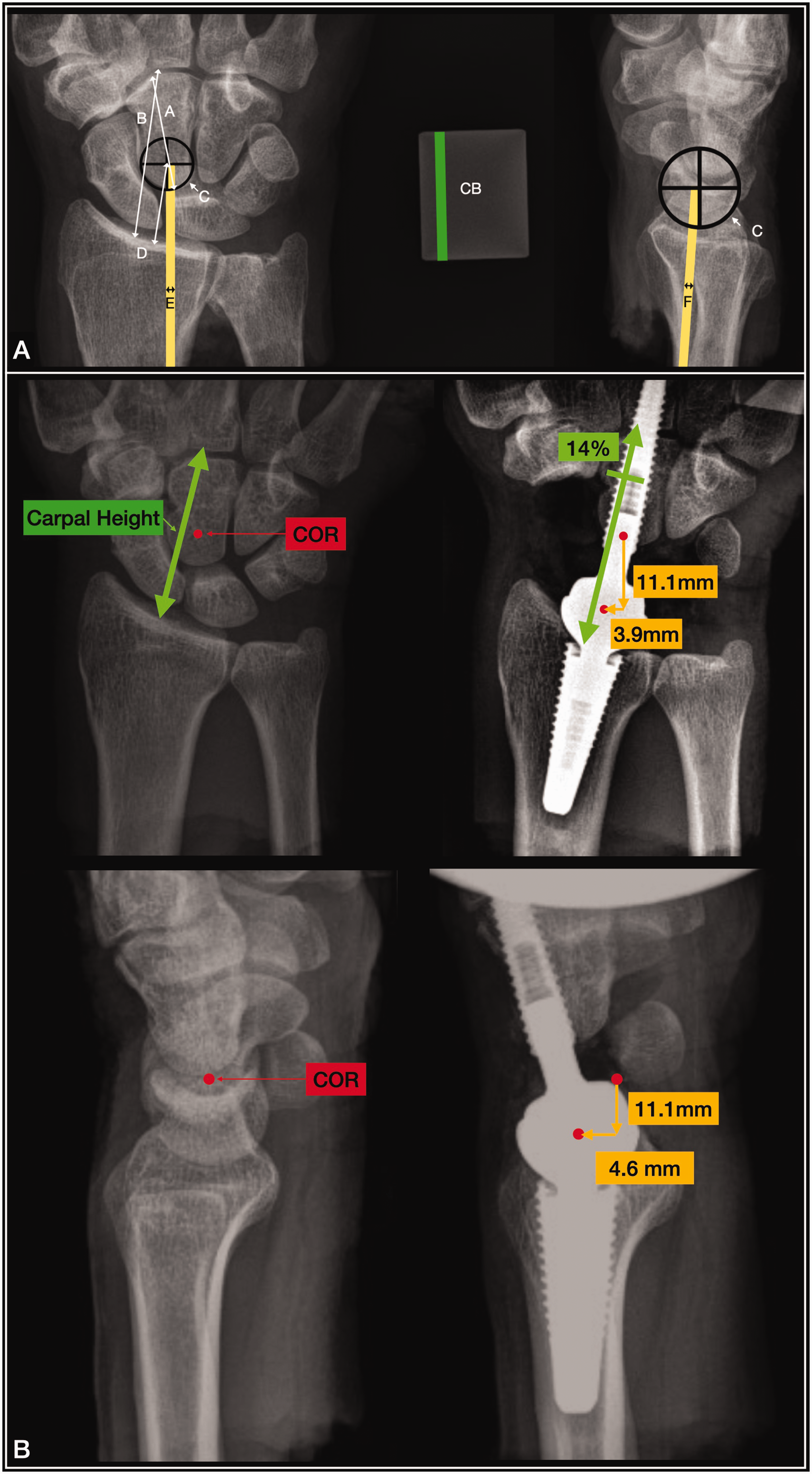
(a) Radiographic measurements and (b) mean change in carpal height (green) and wrist COR (red dot) from intact to implanted wrist on posteroanterior and lateral radiographs. A: capitate height; B: carpal height in line with third metacarpal; C: COR estimate; CB: calibration block; COR: centre of rotation; D: COR height; E: COR offset from ulnar cortex of the radial shaft; F: COR offset from the anterior cortex of the radial shaft.
Centre of rotation: the radiographic COR for the intact wrists was estimated by placing the COR centrally within the proximal pole of the capitate on PA and at the centre of the lunocapitate articulation on lateral static radiographs. The COR for the implanted wrist was estimated to be the centre of the spherical articulation (Youm, 1978).
Carpal height and carpal height ratio: measured using the method described by Nattrass et al. (1994) on PA radiographs.
COR height: measured as the shortest distance from the distal radius volar articular surface to the COR on PA radiographs.
COR offset: a line is first drawn down the central axis of the radius. Lines parallel to this axis are then drawn to lie within the ulnar cortex of the radius on PA radiographs (ulnar cortical line) and the volar cortex of the radius on the lateral radiograph (volar cortical line). Perpendicular lines are then drawn from these cortical lines to the centre of rotation and the distance recorded as the COR offset from these cortices.
Statistical analysis
Paired t-tests were performed to compare biomechanical and radiographic parameters. A p-value <0.05 was considered statistically significant.
Results
Demographics
All specimens were male with a mean age of 59 years (range 49–60) and mean body mass index of 26 kg/m2 (range 21–31).
Stiffness
Implanted wrists had significantly increased joint stiffnesses compared to intact wrists in DTM radial extension (p = 0.006), extension (p = 0.025) and radial deviation (p = 0.006). No significant differences between intact and implanted wrist stiffnesses were found for other motions (Figure 3).
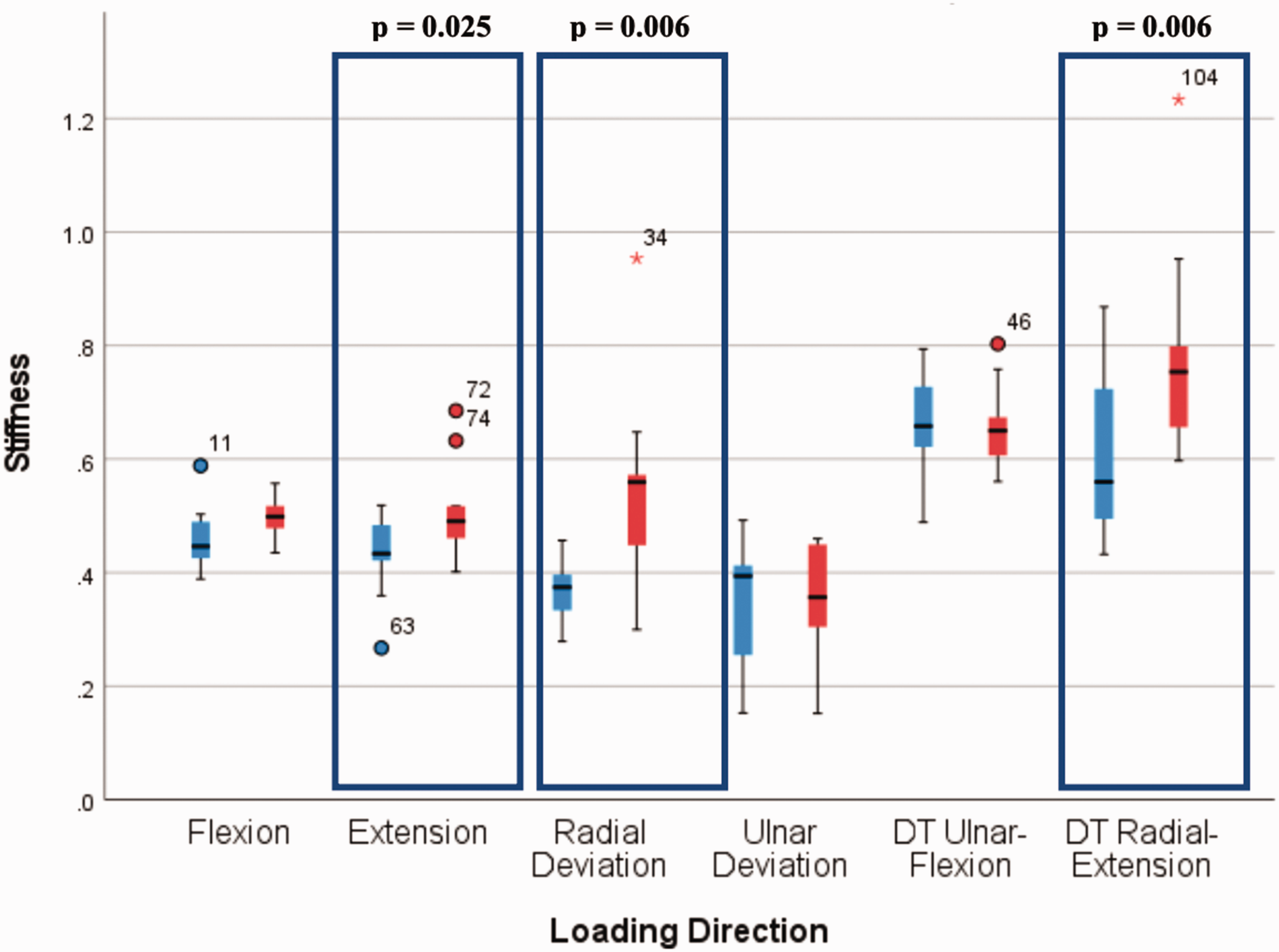
Box plot of stiffnesses in each direction of loading for intact (blue) and implanted (red) wrists. Median values shown as dark lines, boxes identify interquartile ranges, whiskers show minimum and maximum values excluding outliers. Outliers are shown with case numbers identified as closed circles (mild outliers) and * symbol (extreme). Statistically significant results are highlighted within a box. Units of stiffness on y-axis = Nm/degree.
Phase angle
The intact wrist had significantly lower phase angles, indicating minimal energy absorption. Implanted wrists absorbed approximately twice as much energy in all directions: DTM (p < 0.005); FE (p < 0.001); and RUD (p < 0.002) (Figure 4).
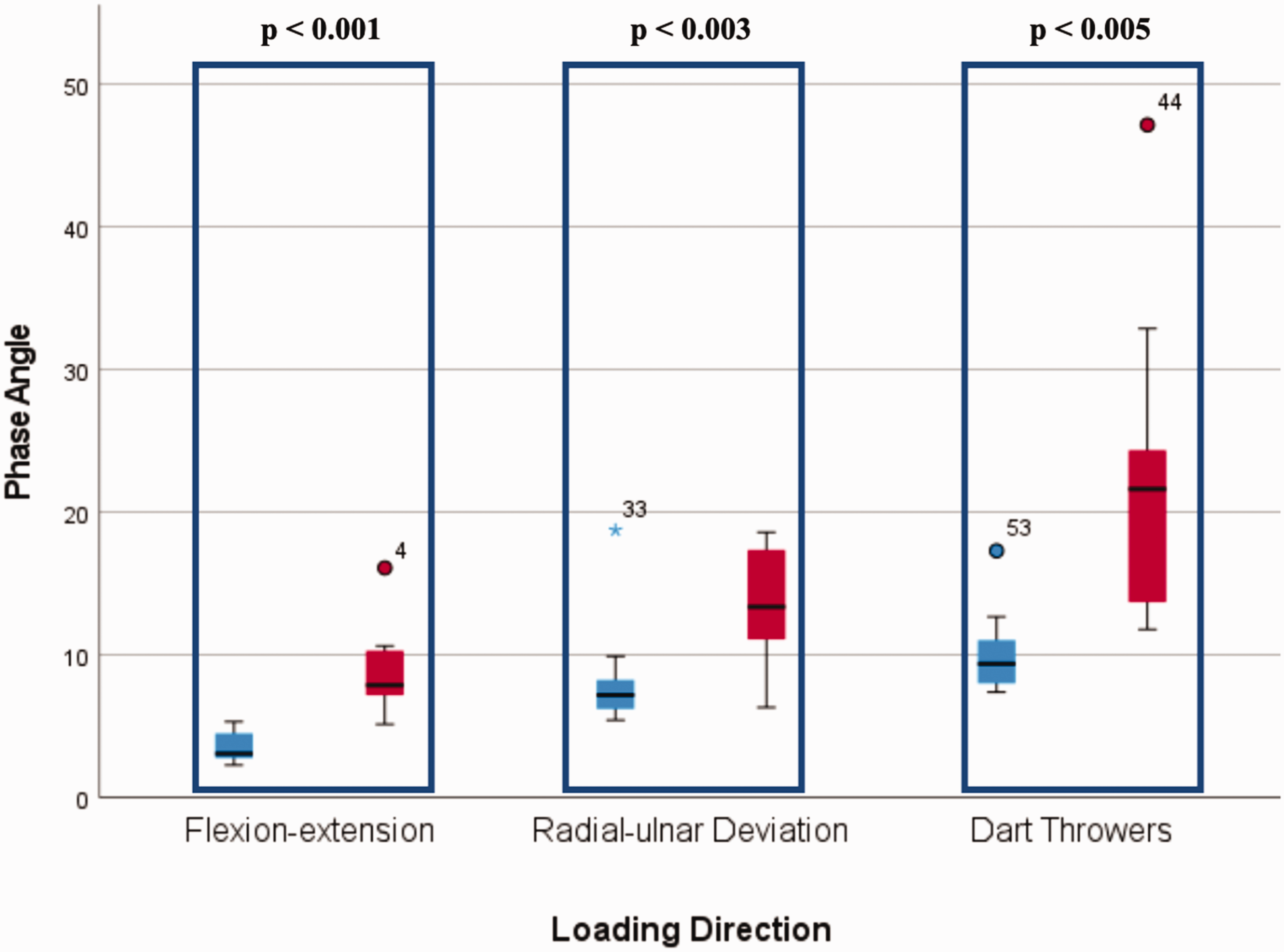
Box plot of phase angles (energy absorption) in each direction of loading for intact (blue) and implanted (red) wrists. Median values shown as dark lines, boxes identify interquartile ranges (quartile 1–quartile 3), whiskers show minimum and maximum values excluding outliers. Outliers are shown with case numbers identified as closed circles (mild outliers) and * symbol (extreme). Statistically significant results are highlighted within a box. Units of phase angle on y-axis are in degrees, where values close to zero indicate elastic behaviour and larger values indicate viscous behaviour.
Load displacement: mechanical behaviour
Analysis of the individual wrist load-displacement summary plots found a predictable load-displacement behaviour for intact wrists. This was reproduced in seven wrists after implantation. In 3/10 implanted wrists, however, a sudden increase in moment (approximately 10 nM) was observed. This was seen when each of these wrists was positioned in extension and radial deviation during FE, RUD and DTM testing (Supplementary Figure 2).
Radiographic results
After implantation, the COR height decreased by 11.1 mm and the COR offset shifted 4.6 mm dorsally and 3.9 mm radially; cumulatively, this represents a 16 mm change in the COR after implantation. Despite this, carpal height significantly increased by 14%. All these changes reached statistical significance (Table 1).
Radiographic results.
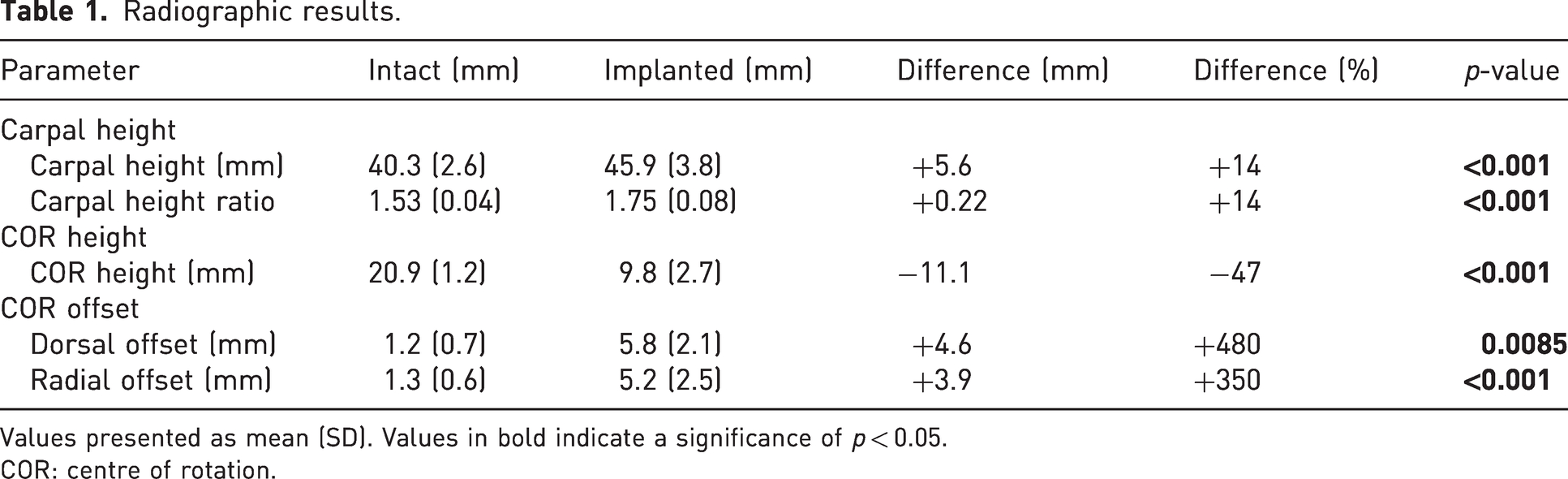
Values presented as mean (SD). Values in bold indicate a significance of p < 0.05.
COR: centre of rotation.
Discussion
Understanding the biomechanical behaviour of the intact and implanted wrist joint is useful when considering arthroplasty. This study shows that fourth-generation spherical articulation wrist arthroplasty can reproduce functional DTM in a similar manner to the native wrist. After arthroplasty, there was an increase in stiffness and phase angle, which is important because these findings represent the wrist as a functional unit. In the intact wrist, forces are shared over multiple joint surfaces, whereas after arthroplasty increased stiffness and phase angle are borne by a single articulation.
The sudden increase in moment observed in three of the implanted wrists on load displacement curves represent the hexapod robot compensating for sudden changes in compressive or shear forces during motion. There were no significant differences between the radiographic parameters of those wrists with or without these sudden changes. This study was not specifically designed to identify a cause of this phenomenon, so future research to investigate the biomechanics of arthroplasty (not implanted) may help define the cause of this finding.
The radiographic COR of the wrist was significantly more proximal, dorsal and radial after implantation. In a three-dimensional sense, this cumulatively represented a mean 16 mm change from the intact wrist. The carpal height was also significantly increased after arthroplasty (Figure 2(b)).
Changes to the location of the COR as well as the height of a joint are known to alter the function of the muscle units acting around that joint. Moving the COR radially and dorsally increases the wrist flexor moment arm and decreases the wrist extensor moment arm. In addition, an increase in carpal height (mean 14%) increases the resting tension and the contractile force of these tendons, according to the Blix curve, amplifying this effect (Blix, 1894). We have calculated that after arthroplasty, that the carpal height is increased by 5.6 mm, but the COR is 11.1 mm more proximal. The normal COR is 20.9 mm distal to the distal radius, which is near the midpoint of the carpal height (51.9%). However, the implanted COR is 9.8 mm distal to the distal radius, placing it in a more proximal aspect of the carpal height (21.4%).
Fixed flexion contractures have been reported in some cases when using this implant resulting in a need for revision surgery to arthrodesis (Reigstad et al., 2017). We postulate that the imbalance in flexor-extensor moment arms, and the over-stuffing of the joint, are important contributing factors in the development of the fixed flexion contractures. Modifications to the surgical technique and/or the implant design could help decrease the observed changes in COR and carpal height, potentially mitigating this complication. However, avoiding increasing the carpal height or overstuffing using the MOTEC wrist replacement can be challenging given that impingement related osteolysis is a recognized complication when using a short-necked prosthesis (Julian et al., 2024; Reigstad and Røkkum, 2018) and increased resection of the proximal capitate may decrease bone stock if revision surgery is later required. Implant design changes to include additional modular ball and socket components with differing offsets and shorter necks that do not impinge may improve the balance of flexor-extensor moment arms while avoiding problems with osteolysis.
The present study has some limitations. First, it was performed using a relatively small number of young, male, disease-free cadaveric specimens who do not representative the patient population undergoing total wrist arthroplasty. Second, the hexapod is inherently limited in its range of motion and loading rate. The number of loading cycles was specifically selected to allow a steady state response to be reached for the assessment of stiffness, phase angle and load displacement. This study was not designed to assess fatigue or wear characteristics under cyclical loading so further cycles were not required. The testing did not account for the combination of loading patterns seen in normal activities and rather tested a single motion in isolation, followed by another. While these are limitations of the hexapod robot, the testing was able to provide a reproducible and reliable comparison between the intact and implanted wrist and could be used to assess alteration to implant designs, modifications of surgical technique or even to compare wrist arthroplasties of differing designs. Third, the procedures were performed by a single surgeon in a cadaveric setting making it less generalizable. Despite this surgeon’s level of experience and the short time frame over which the procedures were performed (2 days), there was significant variation in the radiographic parameters observed (Table 1). We anticipate that there would be considerable variation in implant position if multiple surgeons were involved. Studying this variation, however, would help to better understand how these variations in implant positioning effect the wrist biomechanics, but more importantly the clinical performance and survivorship of the implant.
In conclusion, this study provides cadaveric biomechanical evidence that a spherical articulation total wrist arthroplasty can produce functional ranges of motion including DTM in vitro. The hexapod robot biomechanical analysis is an accurate and reproducible methodology and can be used to compare an intact and arthroplasty wrist. This tool can be used to monitor changes in surgical technique, implant design and allow us to progress our understanding in this field further.
Supplemental Material
sj-pdf-1-jhs-10.1177_17531934241274135 - Supplemental material for Biomechanical analysis of cadaveric wrists before and after MOTEC wrist arthroplasty using a hexapod robot
Supplemental material, sj-pdf-1-jhs-10.1177_17531934241274135 for Biomechanical analysis of cadaveric wrists before and after MOTEC wrist arthroplasty using a hexapod robot by Gregory I. Bain, Simon F. Bellringer, Michael P. Russo, Dhara Amin and John J. Costi in Journal of Hand Surgery (European Volume)
Supplemental Material
sj-zip-2-jhs-10.1177_17531934241274135 - Supplemental material for Biomechanical analysis of cadaveric wrists before and after MOTEC wrist arthroplasty using a hexapod robot
Supplemental material, sj-zip-2-jhs-10.1177_17531934241274135 for Biomechanical analysis of cadaveric wrists before and after MOTEC wrist arthroplasty using a hexapod robot by Gregory I. Bain, Simon F. Bellringer, Michael P. Russo, Dhara Amin and John J. Costi in Journal of Hand Surgery (European Volume)
Footnotes
Acknowledgements
We thank Associate Professor Michael Solomon, Cape Town, South Africa, for performing the surgeries.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: Flinders University received a one-off financial contribution from Swemac Innovation to conduct the experimental research for this study. There was no contractual or implied restriction on utilization or publication of the data and/or review of the data before publication.
Ethical approval
Ethical approval for this study was obtained from Flinders University Institutional Human Research Ethic Committee (Application 294.17).
Supplemental material
Supplemental material for this article is available online.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.