
Abstract
In Intelligent Heterogeneous Vehicular Ad Hoc Networks (IH-VANETs), long urban roads with a high density of vehicles and a maximum number of road signals increase unpredictable delays in terms of long travel times and heavy traffic congestion. These unpredictable delays are exacerbated by the rapid increase in vehicle density and irregular traffic flow on roads with high traffic signals. To address this gap, an optimized fitness-based enhanced ant colony optimization (OF-EACO) for IH-VANETs is proposed. OF-EACO aims to find optimal, uncongested short roads with low vehicle density and fewer traffic signals, thereby providing shorter travel times for vehicles without traffic congestion and unpredictable delays. To achieve this goal, the novel road fitness function of the proposed OF-EACO assigns a high road fitness score to roads according to short length, low vehicle density, and low signal count to support quick travel of vehicles between two ends without delay and traffic congestion. OF-EACO's roulette wheel takes the road fitness scores of available roads as input and outputs the optimal road. The optimal road is rich in all aspects and is intended to reduce travel time through short and un crowded roads. A network simulator is used to simulate the proposed OF-EACO, existing vehicular multi-hop routing algorithm with intelligent transportation system (VMR-ITS), and improved distance-based ant colony optimization routing (IDBACOR).Simulation results of the proposed OF-EACO indicated that, due to the use of optimal roads, it was able to achieve significant improvements in terms of vehicle travel cost, road establishment time, convergence speed, road traffic congestion overhead, routing overhead, Computational overhead, Computational Complexity, Actual Wall Time Analysis, and Energy Consumption compared to VMR-ITS and IDBACOR.
Introduction
IH-VANETs are highly dynamic networks formed by different types of moving vehicles. IH-VANETs facilitate vehicles to communicate with each other and with the Road traffic server(RTS). IH-VANETs integrate and support various vehicular networks, which vary from a vehicle-to-personal device (V2P), vehicle-to-vehicle (V2V), vehicle-to-network (V2N), and vehicle-to-infrastructure (V2I). According to Dubey et al. (2024), the idea of interconnecting V2P, V2V, V2N, and V2I is referred to as Intelligent Transport Systems (ITS). The concept of interconnecting vehicles and RTSs in IH-VANETs frames an instance network to allow vehicles in road networks to exchange information related to accident/road traffic, recreation, and emergency services. Entities of IH-VANETs can use this important information to enjoy different services like exchanging traffic/emergency information and selecting the optimal roads from available roads for travel without congestion and short travel time.
Figure 1 depicts the IH-VANET components and communication types. As depicted in Figure 1, all vehicles in IH-VANETs have an onboard unit (OBU) with hardware capabilities such as a global positioning system (GPS) and human-machine interface devices. GPS coordinates are used for localization. Modern networks are suitable for the adjustment and combination of adaptive features for precise location information. Furthermore, a function called Extended Intersection over Union can be used to improve convergence speed and localization accuracy (Tao et al., 2024). Wireless Access in Vehicular Environments (WAVE) is used for communication between vehicles and RTSs. RTSs are deployed at intersections. The RTS includes network components used for Dedicated Short-Range Communications (DSRC) based radio technology (IEEE 802.11p) (Ramamoorthy & Thangavelu, 2021).
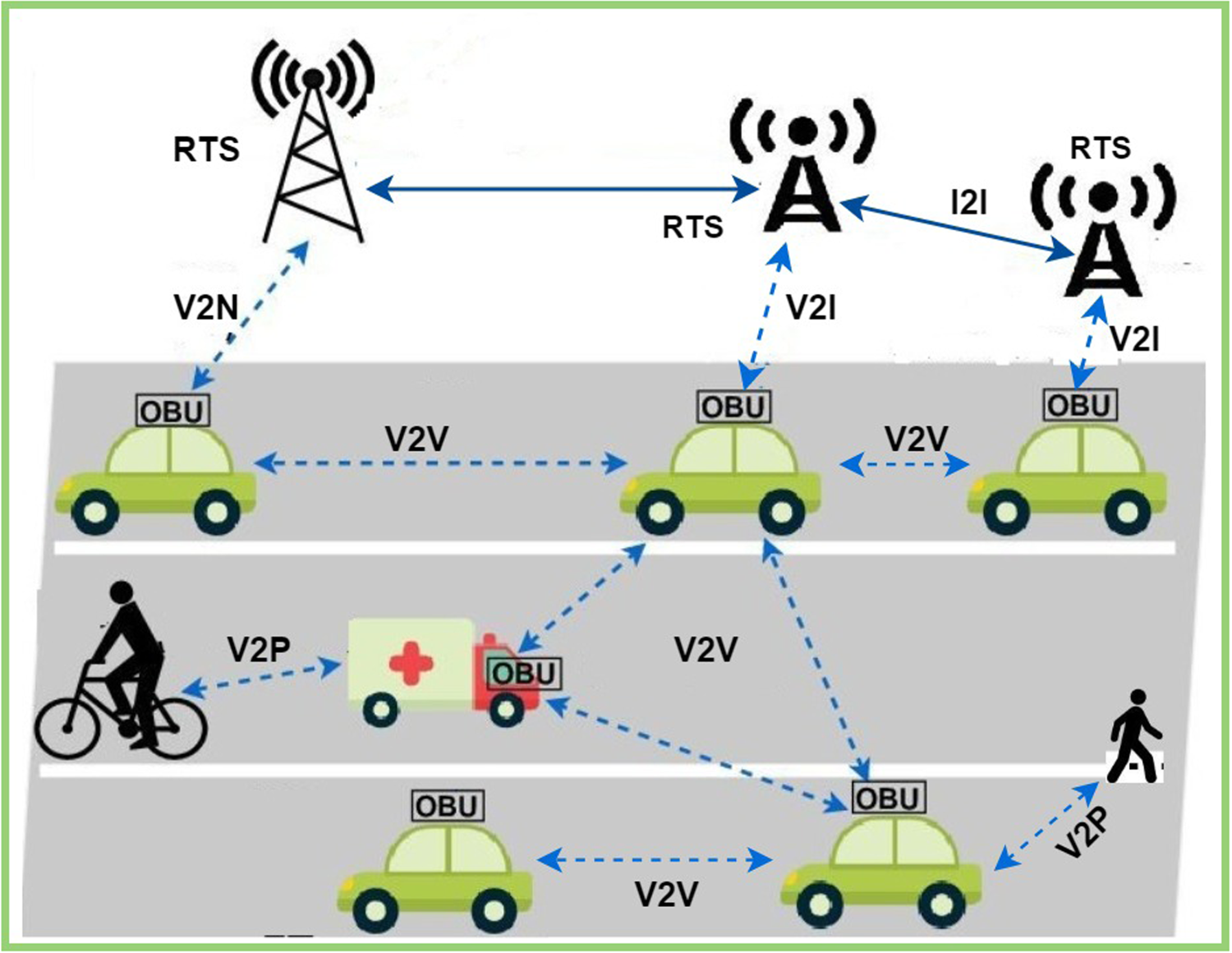
IH-VANETs components and communication types.
According to recent studies by the World Health Organization, urban road accidents (URTAs) account for 27.5 deaths per 100,000 population. Suggesting and proposing solutions to reduce URTAs is a difficult task because urban roads are more diverse than highway roads with more curves, junctions, and different vehicles with different speed factors (Siddiqi et al., 2022). Adding unpredictable delays and long travel times to journeys introduces higher vehicle travel costs and congestion delays. The idea of using IH-VANETs to reduce URTAs, travel time, road length, and traffic congestion has attracted industry and academia (El Hamdani et al., 2020). In road networks, a journey from one place to another place is not economical if it does not meet the value of travel time (VTT) (Flügel et al., 2022). VTT refers to the travel cost/time taken by vehicles to reach their destination without delay or traffic. Importantly, road length and traffic signals also increase VTT. Longer roads and more traffic signals introduce travel delays. Cost-benefit analyses (CBAs) for transport services require low VTT. An important aspect of CBA is the assessment of VTT to save fuel and enjoy other benefits.
Significantly, extensive research has focused on developing conventional models for Vehicular Ad Hoc Networks (VANETs) to provide shortest path or density–based metrics. But a research gap reveals that they still fail to consider factors like road length, road density, and traffic signal count in determining travel performance to reduce VTT in urban road environments. Road length directly increases VTT and overall delay. Variations in road density introduce unpredictable congestion patterns. Current frameworks have not yet addressed the issue of avoiding unpredictable congestion caused by density fluctuations. Additionally, assessing the fitness of roads should be based on road density, yet this is rarely incorporated into routing algorithms. The presence of multiple traffic signals causes irregular waiting times, leading to inaccurate delay and inefficient road segments. Furthermore, the research gap indicates that existing routing algorithms suffer from making routing decisions based on realistic road conditions such as road length, road density, and traffic signals.
The highlighted research gap motivates us to propose a unique, intelligent, and adaptive approach that systematically integrates road length, density-based fitness, traffic signal calculation, and road travel time variations for road selection. Existing models evaluate these factors separately. The proposed approach enables road selection with realistic and balanced traffic distribution. This integration is performed to select the optimal road under heterogeneous conditions to reduce VTT and traffic congestion. In addition to reducing VTT, it also increases road selection time and scalability, meeting the requirements of next-generation ITS. The research gap prompts us to consider variation in optimal road selection by considering variations in road lengths, density-based fitness, traffic signal count, and road travel time variations (Nithyanandam et al., 2024).
Problems related to optimal road selection led to the proposal of a novel OF-EACO to identify the optimal road for vehicles to travel between two endpoints. An optimal road refers to an efficient, uncongested short-haul road with low vehicle density and low signal count. OF-EACO uses nature-based EACO to suggest optimal roads for drivers to travel. EACO is integrated with modules like road length (RL), road fitness level (RFL), and road signal count (RSC) for optimal road selection.
EACO is a bio-behavioral approach that follows the actions of ants (Ramamoorthy, 2024). EACO follows the analogy of traditional ant colony optimization (ACO). An analogy describes how ants determine the route between a food source and a nest. During exploration, ants reach the required food location by deploying a chemical element such as a pheromone. Furthermore, ants available in the same group follow the same route by absorbing the pheromone to reach the food source. During exploration, ants deposit additional pheromones by estimating evaporation rates (Rokbani et al., 2021). Therefore, the optimal route between the food location and the nest is considered the starting and ending point for depositing high amounts of pheromone. In the proposed OF-EACO, the road identification problem is the main task, and the special behavior of EACO follows the analogy of traditional ACO to find optimal roads.
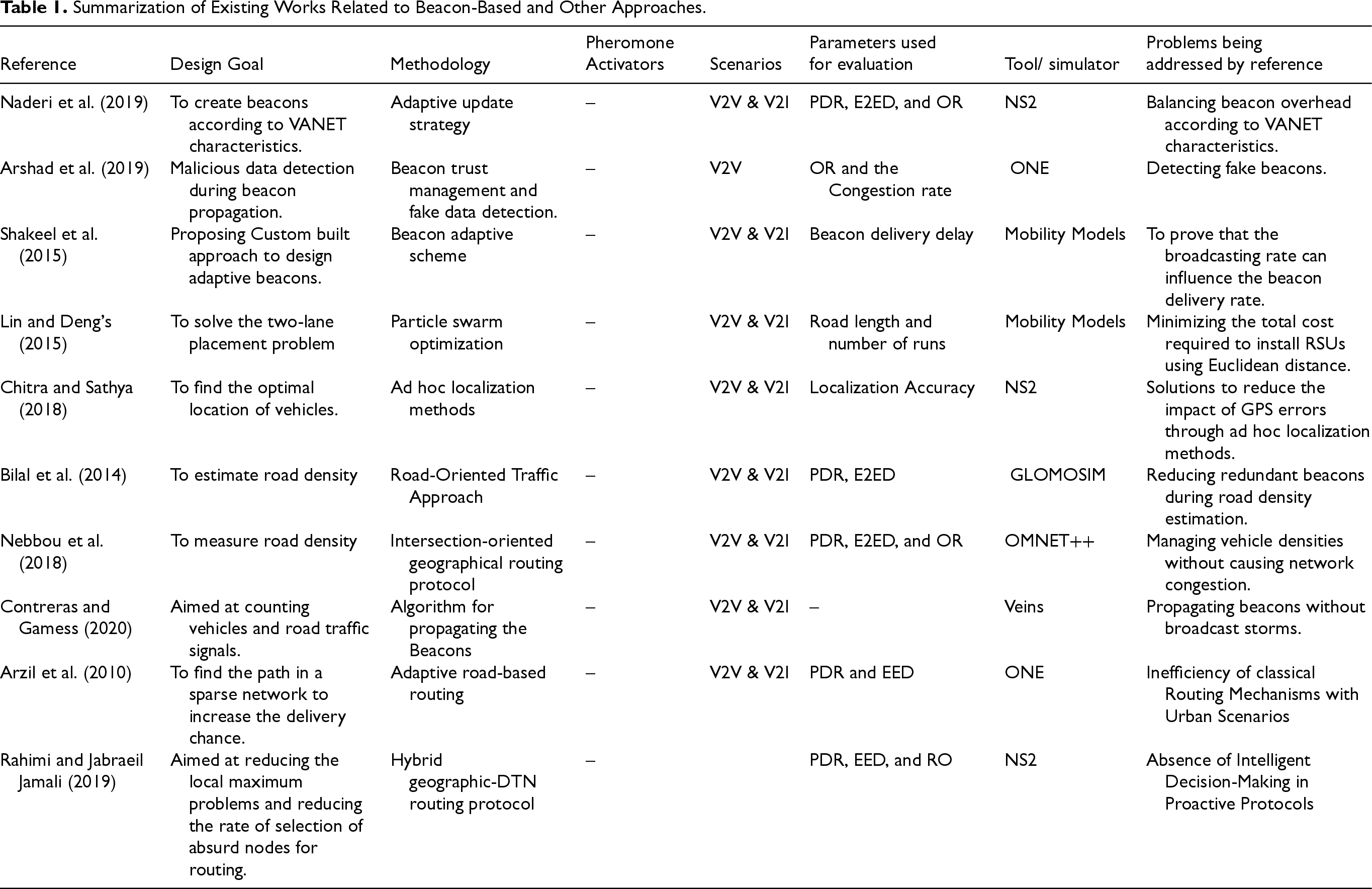
Works related to Beacon-oriented approaches, Dual mode listening scheme (DMLS), RL, RFL, and RSC have been investigated and evaluated. The evaluation is done in terms of goals, methodology, scenarios, performance metrics, tools/simulators, and problems being addressed. ACO-based protocols for optimal road selection for urban networks are studied in terms of design goals, methodologies, pheromone activation types, performance metrics, scenarios, and simulation. Proposing an optimized fitness-based enhanced ant colony optimization for optimal road selection in IH-VANETs. Presenting an enhanced ACO to identify optimal non-congested short-length roads according to RL, RFL, and RFS for assisting vehicle drivers to travel. Investigating the performance of the proposed OF-EACO over IDBACOR and VMR-ITS in terms of vehicle travel cost, road establishment time, convergence speed, road traffic congestion overhead, routing overhead, Computational overhead, Computational Complexity, Actual Wall Time Analysis, and Energy Consumption.
The rest of the manuscript is structured as follows. Section 2 covers related work. Section 3 covers the proposed work. Simulation and results are covered in segment 4. Comprehensive performance analysis is discussed in Section 5. Section 6 covers circumstances affecting the Efficiency of the proposed OF-EACO. Conclusion and future enhancements are covered in segment 7. The final section covers references and required declarations.
Optimal roads are essential for the timely movement of vehicles. The proposed work relies on beacons to collect information about road characteristics. Therefore, this section covers beacon-based works and other significant works related to road finding. In addition, works related to assessing road suitability by considering road length and road density in terms of vehicle and signal calculations are discussed. Furthermore, ACO-related works for optimal road finding are covered in the related work section.
According to Naderi et al. (2019), Roadside Units (RSUs) can play multiple roles to distribute data/control packets through geographic forwarding, and Arshad et al. (2019) stated that channel capacity, transmission power, and beacon generation rate affect the broadcast rate of beacons. Shakeel et al. (2015) demonstrated that using the concepts of sequence number and time-to-live can avoid spurious beacons and wide propagation of beacons (location, advertisement, and hello). Lin and Deng (2015) demonstrated that the road length can be found using Euclidean distance, and the length of segments can be found by exchanging location coordinates using advertising beacons (Chitra & Sathya, 2018). In Bilal et al. (2014), the road is divided into segments, and the vehicle in the middle of the segment is elected as the Group Leader (GL). The GL can broadcast Segment Density Packet (SDP) to other GLs on the same road to collect data from other segments (Nebbou et al., 2018).
VANET technology (Contreras & Gamess, 2020) relies on beacon propagation to count vehicles and traffic signals; this propagation helps vehicles to learn about each other and maintain a neighbor list. In Arzil et al. (2010), store-carry and forward approaches were followed to overcome local maxima problems, and Rahimi and Jabraeil Jamali (2019) focused on reducing the local maxima problem that occurs when choosing the next hop for packet routing. In Heidari et al. (2025), fuzzy logic based on multi-criteria decision making prioritizes vehicles to eliminate transmission storms and provides efficient data transmission. To enhance scalability and optimize shortest distance calculations, Liu and Meidani (2025a) proposed a framework that supports finding a single shortest path using graph neural networks (GNN). GNN captures spatial relationships and structural evidence in graphs to improve accuracy and efficiency. Furthermore, Liu and Meidani (2025b) use a variant of GNN to solve traffic allocation. Extensive experiments have been conducted to provide accurate estimates of link flows and utilization ratios. The similarities between works 10–19 are the use of beacon propagation, and the differences are the different design goals and the problems being addressed (listed in Table 1).
Summarization of Existing Works Related to Beacon-Based and Other Approaches.
Summarization of Existing Works Related to Beacon-Based and Other Approaches.
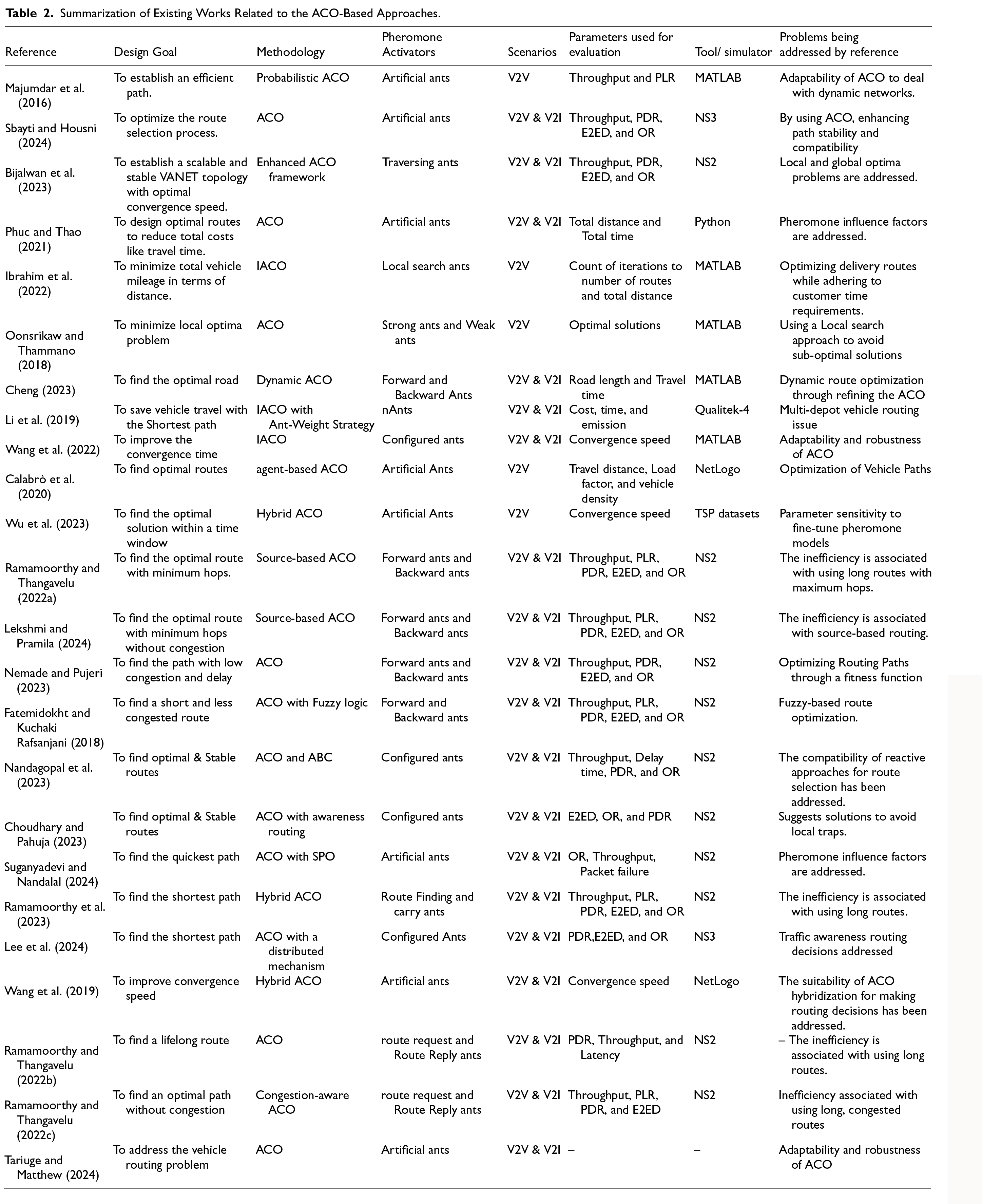
As a biological entity, the hunting process of ACO allows ants to navigate towards a food source by laying down pheromones along their path. Similarly, the ants can return to the nest via the same route by adjusting the pheromone levels based on the rate of evaporation. This highly pheromone-laden path represents the optimal route in terms of short distance. This analogy is followed in all sources (Bijalwan et al., 2023; Calabrò et al., 2020; Cheng, 2023; Choudhary & Pahuja, 2023; Fatemidokht & Kuchaki Rafsanjani, 2018; Ibrahim et al., 2022; Lee et al., 2024; Lekshmi & Pramila, 2024; Li et al., 2019; Majumdar et al., 2016; Nandagopal et al., 2023; Nemade & Pujeri, 2023; Oonsrikaw & Thammano, 2018; Phuc & Thao, 2021; Ramamoorthy et al., 2024; Ramamoorthy & Thangavelu, 2022a, 2022b, 2022c; Sbayti & Housni, 2024; Suganyadevi & Nandalal, 2024; Tariuge & Matthew, 2024; Wang et al., 2019; Wang et al., 2022; Wu et al., 2023) to present optimal solutions concerning routing and other factors.
In Majumdar et al. (2016), the probability function of ACO depends on vehicle density and road length for route expansion. ACO quickly selects the optimal routes. In Sbayti and Housni (2024), Optimized Link State Routing (OLSR) and ACO find routes using an intelligent route selection method. Optimal metrics such as distance and mobility are considered for route selection. Bijalwan et al. (2023) proposed an improved ACO to reach the optimal solution with minimum iterations. The pheromone update rule and the evaporation factor improve ACO convergence speed to overcome local and global optima problems. Phuc and Thao (2021) added practical constraints with ACO to solve vehicle routing problems. The route constructed by the ants is recorded in the solution set. From the solution set, the optimal route is selected based on the pheromone intensity. The optimal route is time-specific and short in length. In Ibrahim et al. (2022), improved ant colony optimization (IACO) relies on local search and mutation operations to solve the vehicle routing problem. Local update rules are followed to deposit the strongest intensity of pheromones on the optimal roads. A global update rule is implemented each time to maintain the strongest intensity on the optimal routes.
In Oonsrikaw and Thammano (2018), the pheromone is updated according to the ratio between the length of the path and the value of the constant. A weight is assigned to each path based on the feedback from the strongest ants. The ACO-based dynamic path optimization algorithm (Cheng, 2023) calculates a weighting factor for each road based on the road length and estimated travel time. Based on the weighting factor, the optimal road is selected. The dynamic optimization makes the routing mechanism loop-free with an optimal convergence speed. IACO (Li et al., 2019) relies on innovative schemes to update pheromones on optimal solutions to deliver better results for reducing vehicle cost and time in vehicle routing problems. Furthermore, IACO (Wang et al., 2022) is improved by adding the Floyd algorithm. The Floyd algorithm applies a fallback strategy to improve the performance of the heuristic function. Also, an optimization-based multi-objective function is proposed, and energy consumption, length, and safety are considered for route formation.
Calabrò et al. (2020) applied ACO to identify the optimal road with the help of an objective function by considering travel distance and hop count. Similarly, a hybrid ant colony (HACO) (Wu et al., 2023) with a mutation operation can find the optimal road. This work adds three inventions to ACO, which include a new pheromone rule, adaptive metrics, and a mutation operator. In Ramamoorthy and Thangavelu (2022a), ACO is modified to add a source-based routing concept to guide ants in finding a road with optimal distance and hops. The highest amount of pheromone in terms of summation is considered to select the path. In Lekshmi and Pramila (2024), the same source-based ACO is enhanced with a priority scheduling concept for message dissemination. Authors classify messages to assign priority values to avoid the stagnation problem.
In Nemade and Pujeri (2023), ACO helps ambulance drivers to choose the route with minimum congestion according to the fitness value. The fitness value is calculated according to the network congestion and vehicle travel speed. In Fatemidokht and Kuchaki Rafsanjani (2018), ACO applies fuzzy rules to select the route according to the signal strength, congestion level, and speed. The pheromone intensity for optimal channels depends on fitness value. A hybrid (ACO and artificial bee colony optimization (ABC)) algorithm (Nandagopal et al., 2023) computes fitness degree according to link stability and residual strength. To provide quick communication, the network is divided into zones to apply proactive and reactive approaches. Different fitness degrees are made for proactive and reactive schemes. However, the hybrid optimization algorithm (Choudhary & Pahuja, 2023) is improved with an aware routing scheme to provide reliable routing for VANETs. In addition to link stability and residual strength, vehicle mobility is considered for route formation. ACO is configured with an ant colony operator to avoid native traps.
In hybrid ACO with Spider Monkey Optimization (SPO) (Suganyadevi & Nandalal, 2024), distance and traffic-based principles are used as metrics in the path-finding operations. Vehicle direction is considered to measure distance, and road inflow/outflow is considered to estimate traffic. Similarly, in the hybrid bio-inspired zone routing scheme (Ramamoorthy et al., 2023), path-finding and route-carrying ants are used in path-finding operations. Route Strength Factor (RSF) determines the suitability of a route according to the pheromone density. In Lee et al. (2024), ACO-based traffic-aware routing introduces a distributed mechanism for traffic detection and path-finding operations. A two-hop path finding mechanism is used to estimate traffic and road suitability.
According to Wang et al. (2019), a hybrid ant colony-artificial fish optimization algorithm improves the convergence speed by iterating quickly to avoid local optima. A strong positive feedback system improves the pheromone rule to produce optimal results. Similarly, ACO (Ramamoorthy & Thangavelu, 2022b) is configured to calculate the path strength factor to improve the algorithm speed with fewer iterations. In congestion-aware ACO (Ramamoorthy & Thangavelu, 2022c), node-level congestion and distance are used as metrics to find non-congested optimal roads with minimum iterations. Pheromone patterns continuously control pheromones to prevent inefficient nodes from participating in routing. Furthermore, ACO (Tariuge & Matthew, 2024) has been improved and is used to guide navigation systems. This work aims to control traffic congestion by informing drivers about traffic conditions (Ramamoorthy et al., 2024).
Table 1 summarizes the existing works related to beacon-based and other approaches. Table 2 summarizes the existing works related to ACO-based approaches. The similarities between works 23–46 are the use of ACO approaches, and the differences are the different design goals and the problems being addressed (listed in Table 2).
Summarization of Existing Works Related to the ACO-Based Approaches.
In Tables 1 and 2, Packet delivery rate/ratio (PDR), end-to-end delay (E2ED), Routing overhead (RO), Packet loss rate (PLR), Delay Tolerant Network
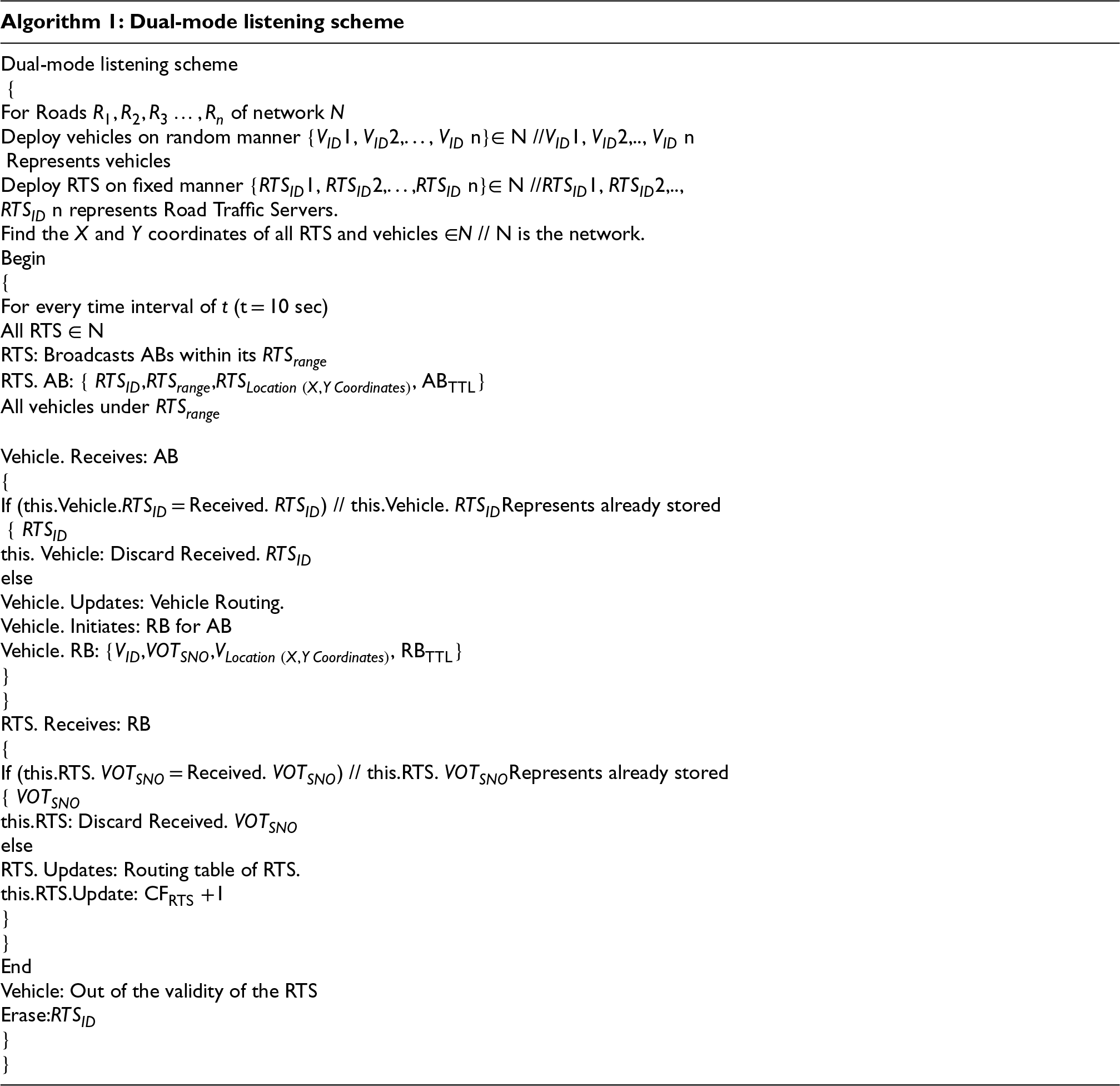
This work proposes OF-EACO to find the optimal road for vehicles to travel between two ends. The first step of OF-EACO covers the DMLS, which allows vehicles to register with the RTS. In DMLS, the RTS enables vehicles in its vicinity to register with it for an Advertisement Beacon (AB). Vehicles under RTS respond to AB with a Registration Beacon (RB) to become legitimate members of RTS. AB is designed by RTS for advertising to indicate its presence. A vehicle under the communication area of RTS receives AB and responds with RB to become a valid member of RTS. RB and AB play important roles in grouping vehicles under RTS. The status of the vehicle count under each RTS is maintained to provide an up-to-date vehicle count. For each time interval “t” (t = 10 s), the RTS and vehicle routing table are updated with the latest count of vehicles. The role of DMLS is crucial, such as bringing each vehicle under RTS and maintaining vehicle count and road signal count to assist EACO for optimal road selection.
The second step of OF-EACO is to find the road length (RL) from the network “
The fourth step begins with the calculation of the road signal count on each road. RTS performs a count of road signals in its vicinity. Road signal (RS) advertises a hello beacon (HB) message for every time interval “
Figure 2 presents the modules of OF-EACO. In OF-EACO, vehicles are randomly placed, and RTS are kept constant. The DMLS system allows vehicles to register with RTS. RL determines the length of each road. RFL finds the fitness level for available roads. The road signal calculation module calculates the road signal count for each road. Then, EACO starts operations with a pheromone deposit and updates procedures for crediting and updating pheromones on the “R” road based on RL, RFL, RSC, and evaporation rate. Based on the pheromone intensity, a road fitness score is calculated for the road to allow the optimal road selection model (ORSM) to select the optimal road “R” from the available roads. A roulette wheel helps ORSM to choose the road with the highest fitness score. A road with a high fitness score is shorter in length, with lower traffic/vehicle density and lower signal count.
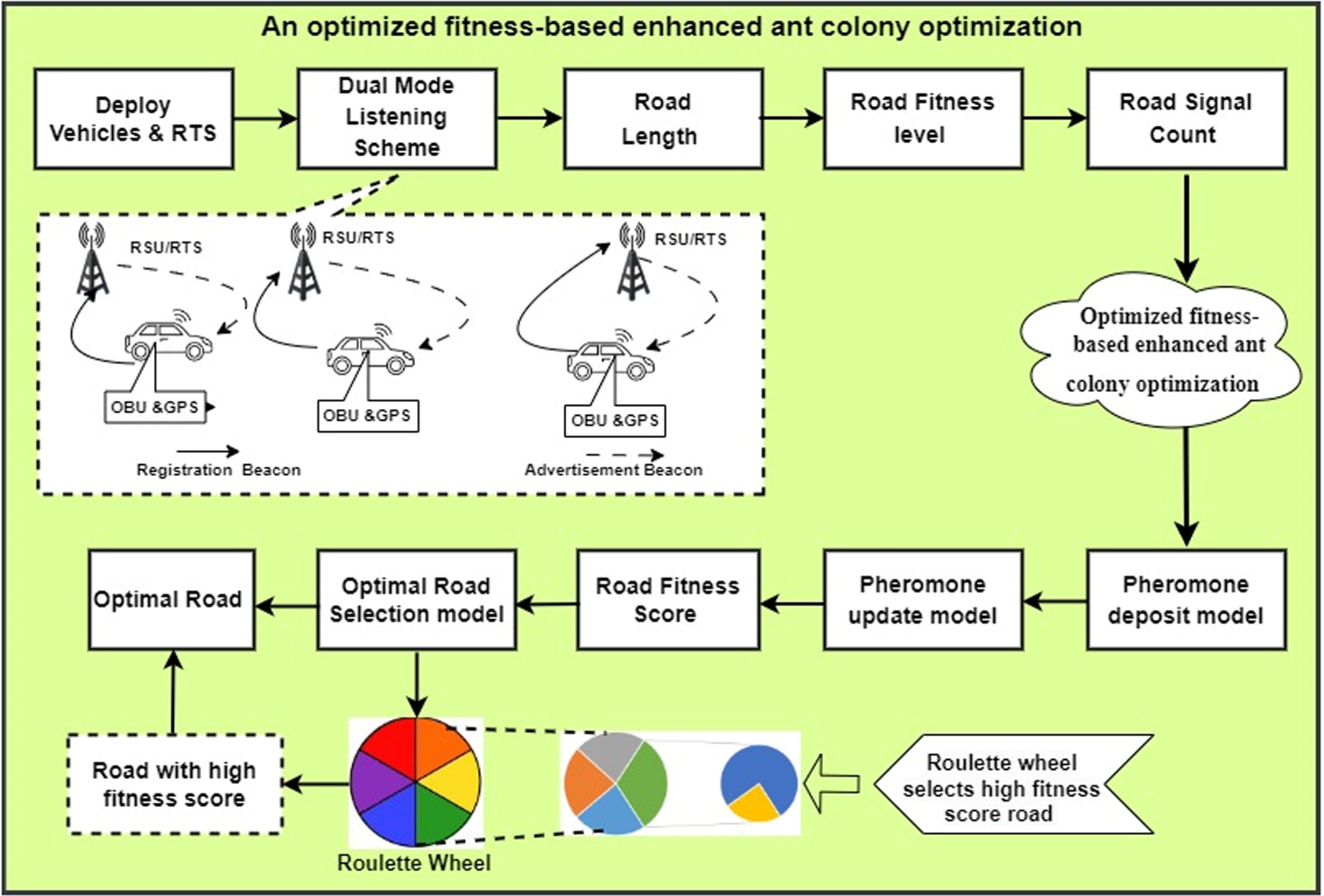
Architecture of OF-EACO.
In DMLS, the vehicle and RTS use beacons to communicate with each other. Each vehicle can register with RTS for AB to become a legitimate member under RTS. RTS considers the location of vehicles to agree vehicles as their legitimate members. For a vehicle to be recognized as a legitimate member of the RTS, it must be within the communication range of the RTS. Vehicles and RTS are equipped with GPS to transmit their locations in the form of X and Y coordinates.
In a road network, each RTS consists number of vehicles under its communication area. In DMLS, RTS can broadcast ABs within its communication area with a time interval of t. The RTS broadcasts AB, which includes the road traffic server ID (
For every time interval t, the routing table of RTS and vehicles is updated with fresh vehicles and RTS. Significantly, to avoid double registration with more than one RTS, the vehicles discard ABs by comparing
Every RTS has its covered communication range (CCR), and CCR represents

Advertisement beacon.

Registration beacon.

Vehicle routing table.

RTS routing table.
In Figure 3,
The RL indicates the total length of the road segment between the starting point and the end of the vehicle. The location of the start point and end point can be obtained in the form of GPS coordinates. In this work, RL can be calculated according to Equation 2. Equation 1 shows the road segment. 

Let R be the road that belongs to the network 

The road signals are operated under RTS. The RSC represents the number of road signals available for road “R”. RSs are deployed at junctions of each road/pedestrian crossing place. RS propagates an HB for every time interval t to enroll with RTS. The t is set to 200 s. Figure 7 shows the structure of the hello beacon. RTS maintains an up-to-date count of RSC. The RSC register in RTS maintains a count of road signals in its vicinity.

Hello beacon.
In Figure 7,
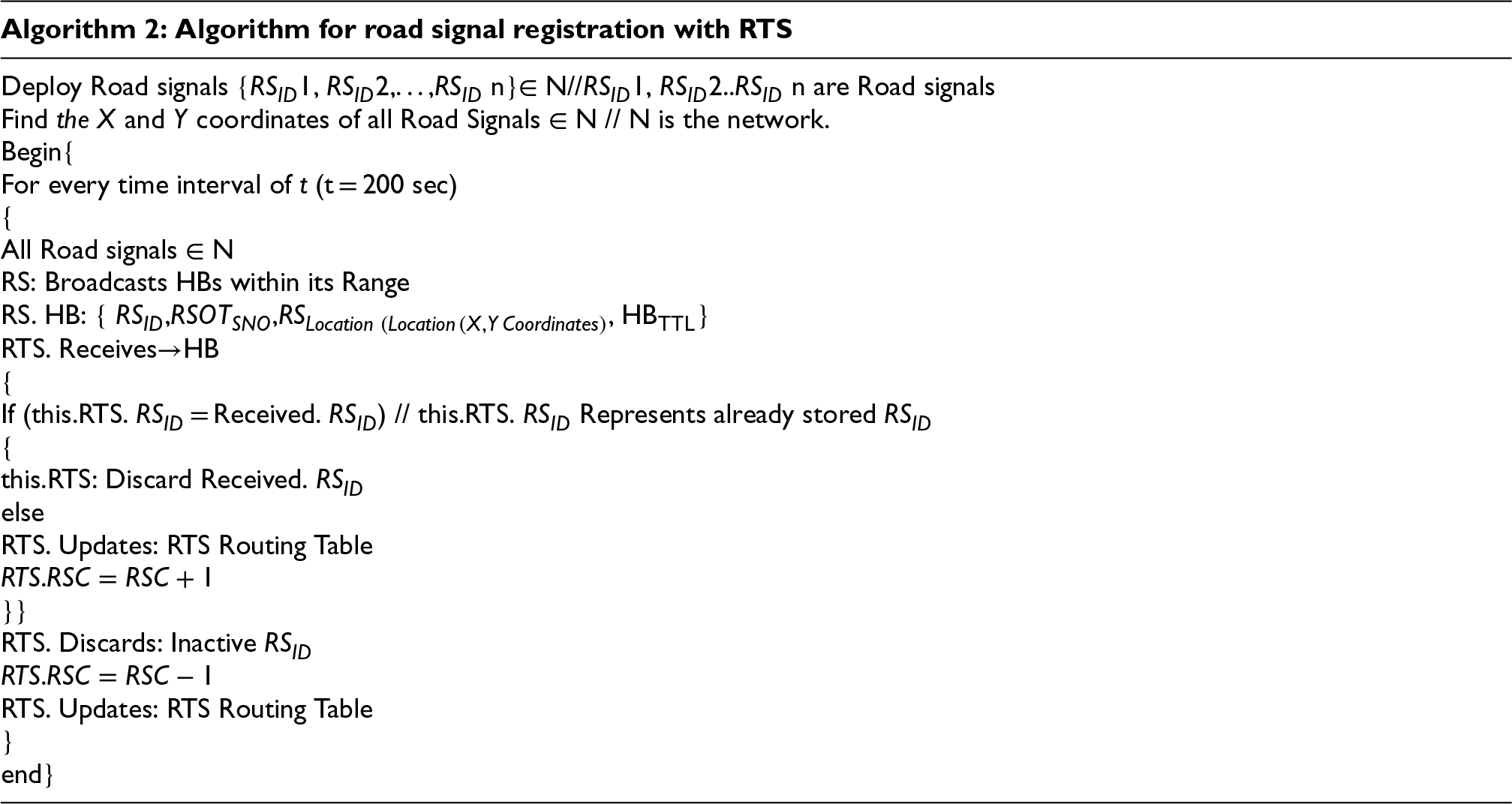
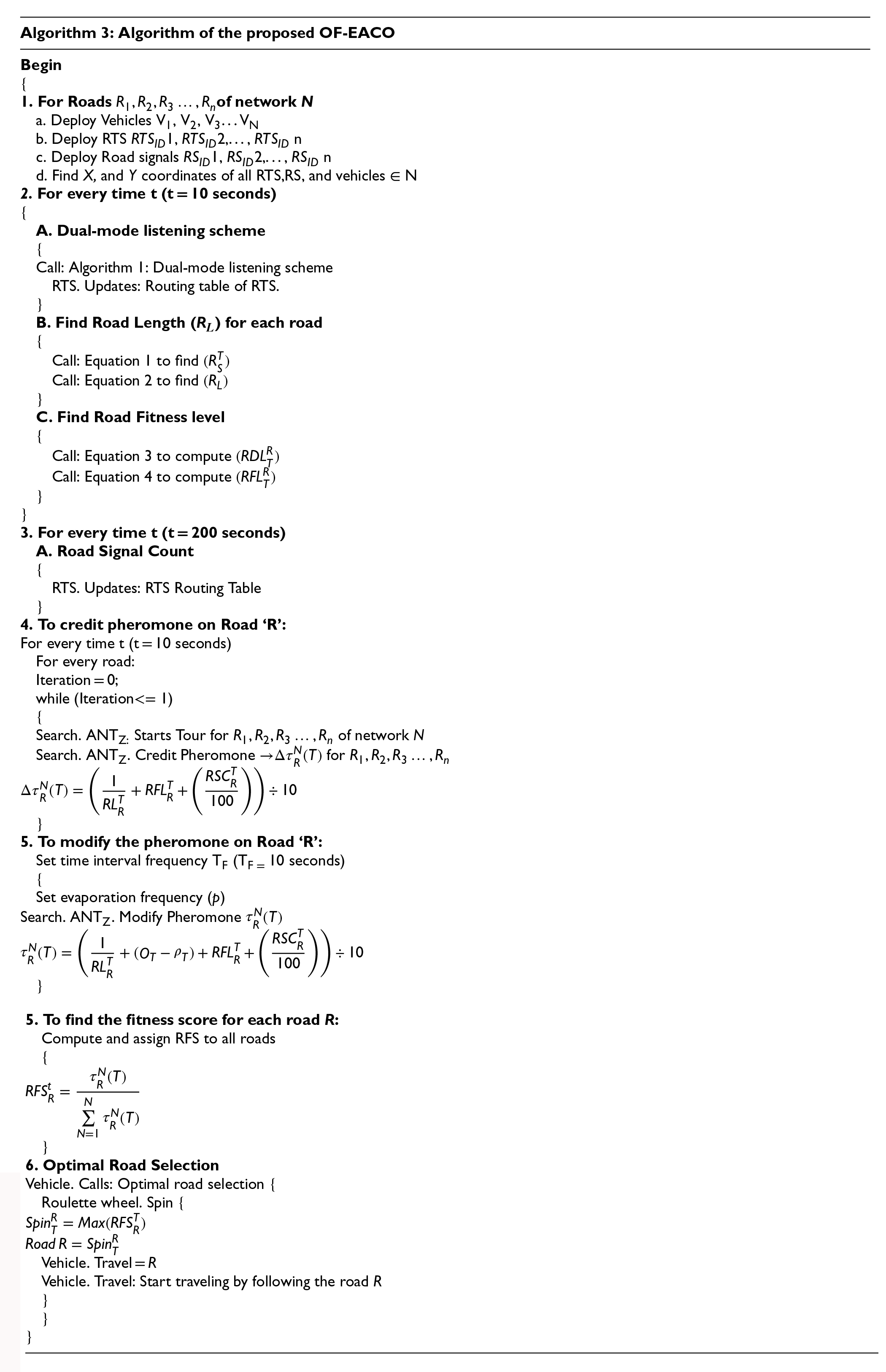
Figure 8 illustrates the flowchart of the proposed OF-EACO. This flowchart details the step-by-step operations carried out by the proposed OF-EACO to identify an optimal road. To facilitate operations and initiate the proposed model, essential parameters are needed. These parameters include three types: network topology inputs, vehicle dynamics, and EACO hyper parameters. Network topology inputs and vehicle dynamics are essential for performing DMLS and calculating RL, RFL, and RSC. EACO hyper parameters are necessary to identify the optimal roads. The process begins with network topology inputs. For this, OpenStreetMap data was downloaded to include roads, vehicles, speed limits, RTS, and RSC. Next, vehicle mobility traces were generated through an urban mobility simulation with traffic density profiles, including the number of vehicles and speed distribution. Finally, EACO hyper parameters—such as colony size, initial pheromone values, evaporation rate, pheromone patterns, and fitness function—require a call to ORSM to determine the optimal roads.
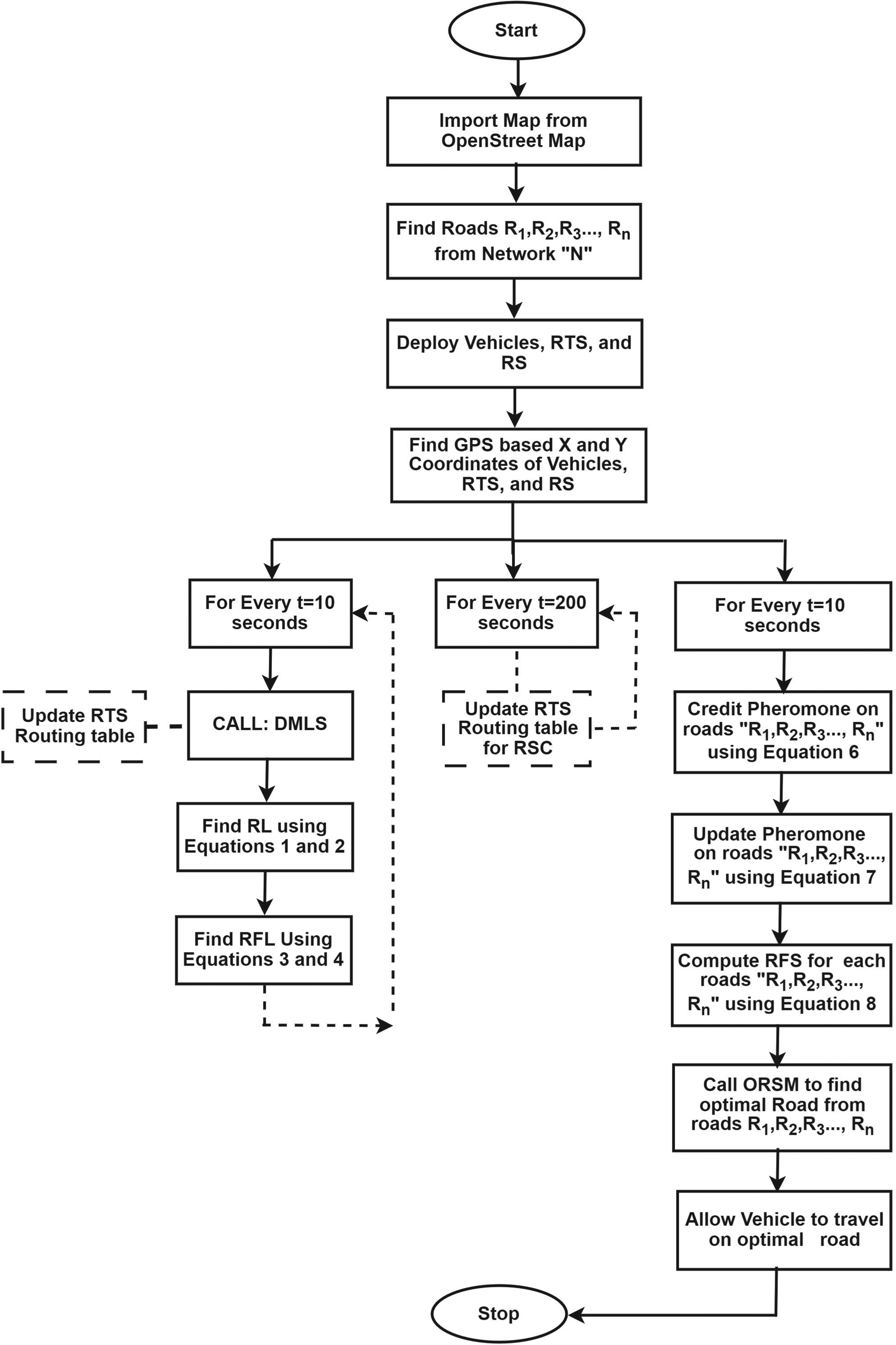
Flowchart of OF-EACO.
EACO is a successful strand of swarm intelligence (SI). SI aims to build intelligent systems by simulating the cooperative behavior of insects such as ants and bees (Jindal & Bedi, 2018; Thilak & Amuthan, 2018). EACO is an upgraded bio-inspired system activated by the natural activity of ants. Ant foraging activity demonstrates that ants can discover the optimal lane between origin and target in the absence of visual cues. EACO's configured ants can invent the shortest path between two points with less complexity. EACO deposits the pheromone in the direction the ants travel. In EACO, search ants use pheromones as a communication medium for indirect communication without visual cues. The search ants navigate to food sources using the maximum pheromone concentration set by preceding ants. Similarly, the same search ants navigate from food source to nest by following the same route, depositing specific amounts of pheromones according to evaporation rate. Ants are often attracted to high quantities of pheromones, which allow them to choose the shortest path with a short time delay. EACO’s dynamic qualities, such as a basic structure, route selection capabilities, self-organization, and distributed administration control, make it adaptable to solving VANET routing challenges.
In the upgraded EACO, a set of programmable software agents, such as search ants, find an optimal solution to a given optimization problem. To implement EACO, the discovered problem is turned into a weighted network to identify a more efficient solution. Search ants solve problems by traveling forward in a weighted network. The solution construction activity is stochastic and is impacted by factors such as RL, RFL, RSC, and the evaporation rate associated with roads whose values are regularly adjusted by search ants at runtime. In the proposed framework, the roulette wheel selects the high-fitness score road with the maximum pheromone density for quick travel without delay. The pheromone of the road is computed based on RL, RFL, and RSC. Search ants in EACO travel toward the target in a forward way based on road parameters such as RL, RFL, and RSC. For optimal road selection, EACO includes an objective function. Equation 5 denotes the OF-EACO's objective function. An important aim of the objective function of OF-EACO is to find a high-fitness score road between the origin and the destination (Ramamoorthy et al., 2024). A road with a high fitness score value is an optimal road with a short distance, low density, and low signal counts.
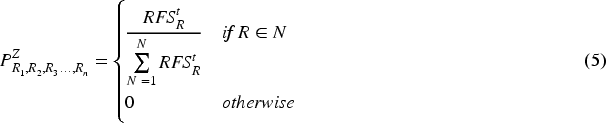
In equation 5,
Pheromone concentration determines the suitability and optimality of a route. Consider there is a road R with a start point 
In equation 6, R is the road in network N.
The objective of the pheromone update model is to update the pheromone on the roads. The evaporation process reduces the pheromone concentration on the roads over time. Remarkably, this model updates the pheromone on the roads for every time interval 
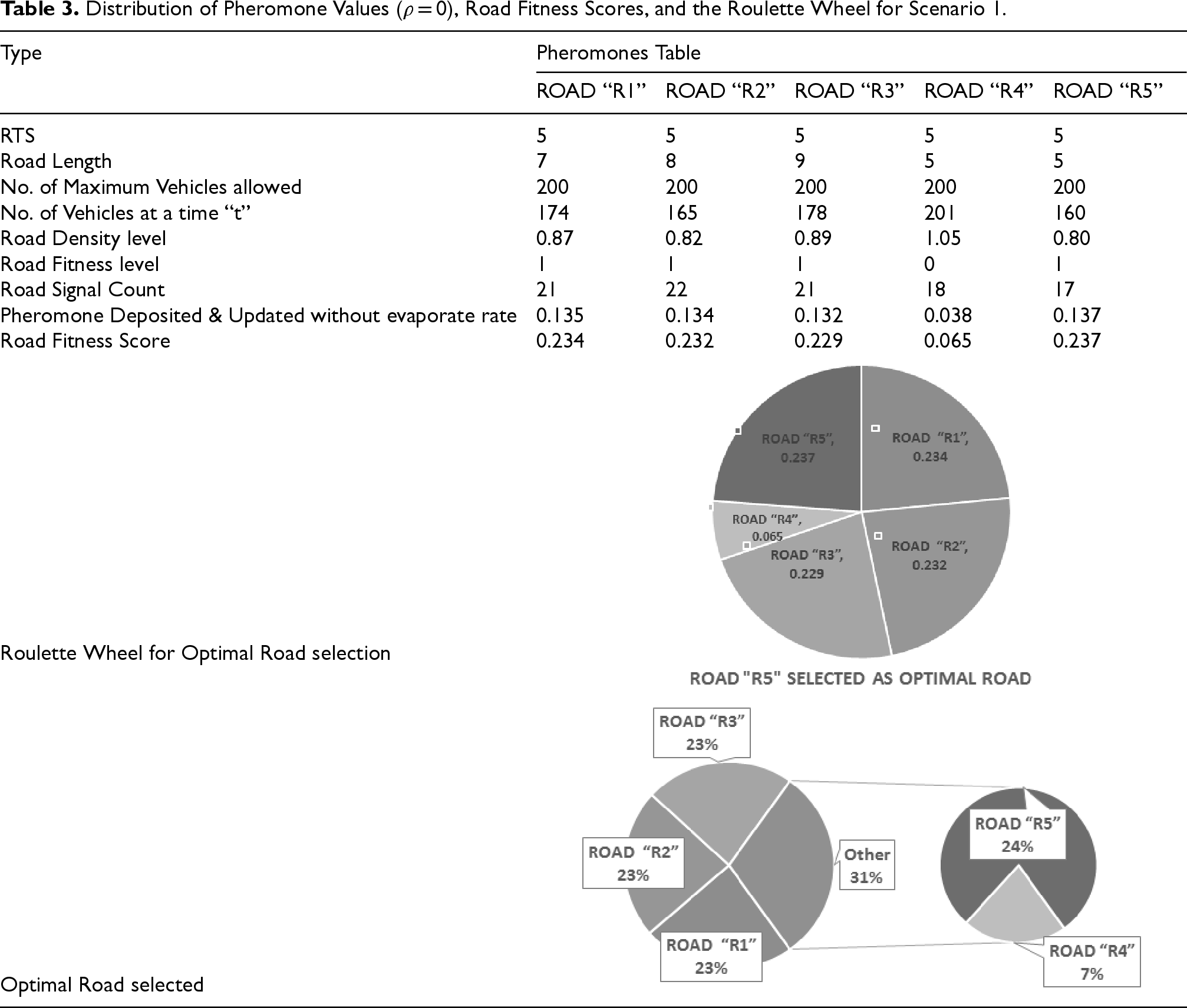
Distribution of Pheromone Values (
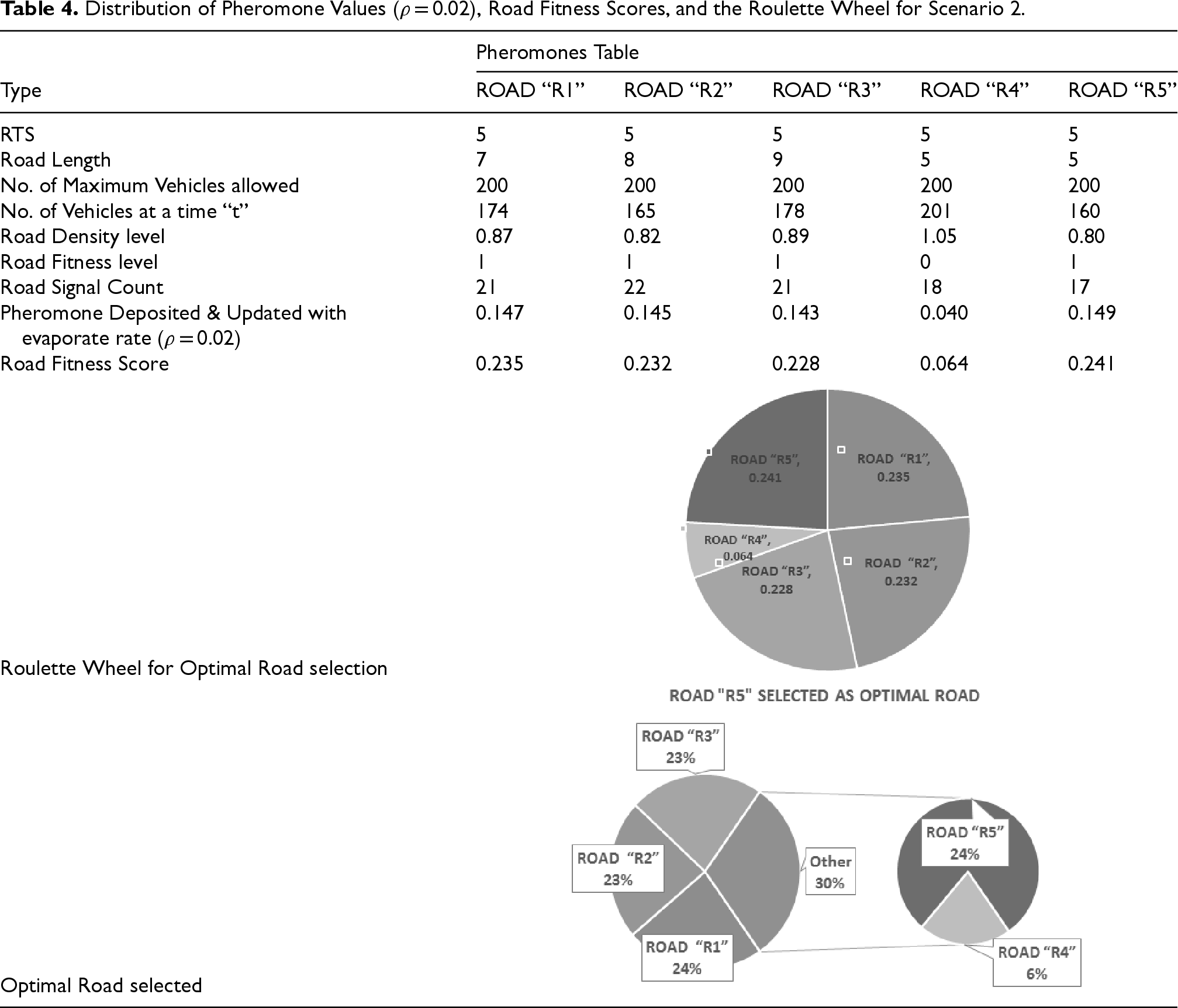
Distribution of Pheromone Values (
Distribution of Pheromone Values (ρ = 0.04,0.03,0.05,0.01,and 0.02), Road Fitness Scores, and the Roulette Wheel for Scenario 3.
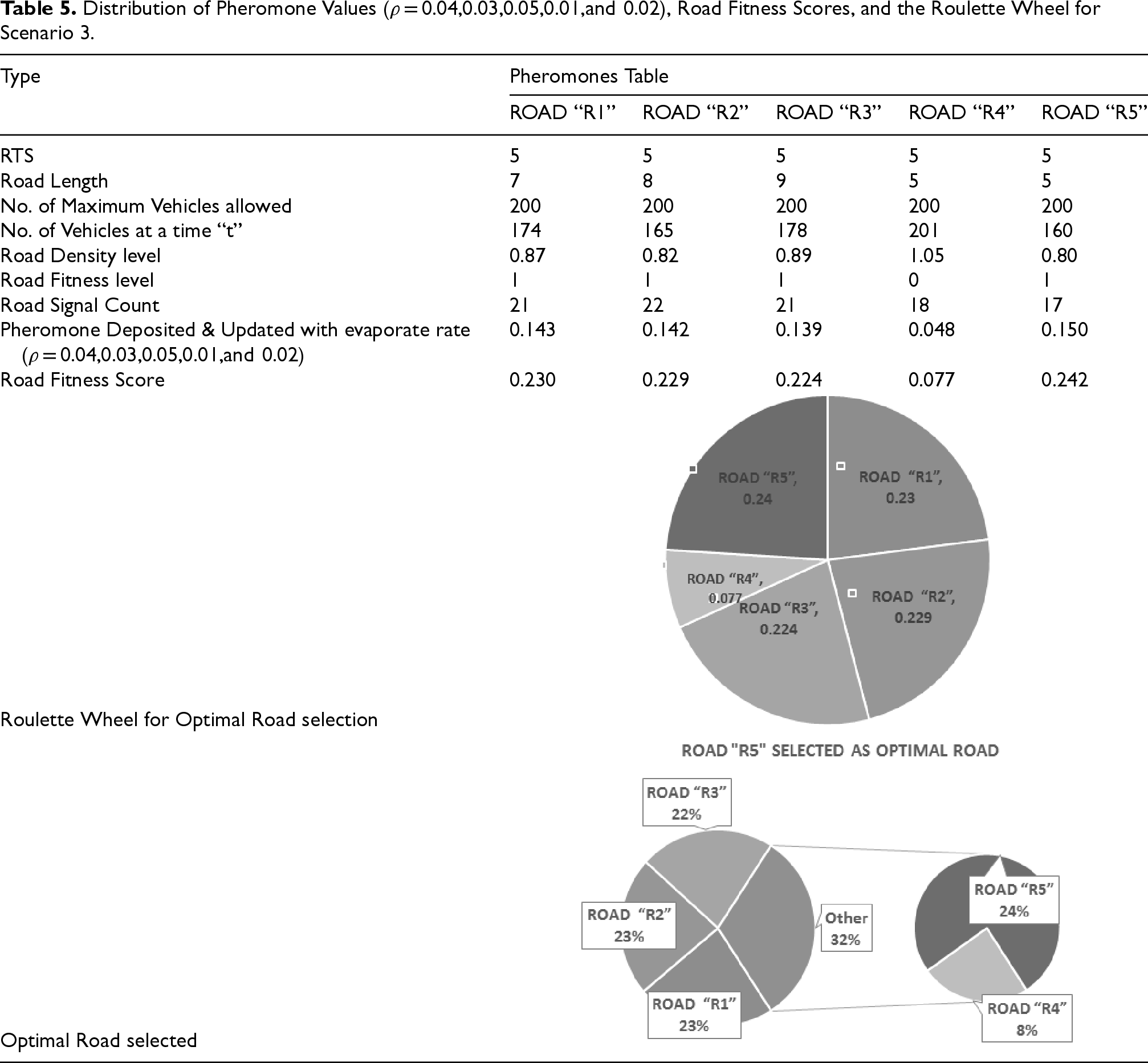
Figure 9 presents the pheromone intensity levels and fitness scores assigned to each road according to the pheromone models. Equations 6 and 7 represent the formulas for pheromone models used to assign pheromones. Figure 9 shows the pheromone values and road fitness scores assigned to each road according to the starting and ending points of the vehicles. Tables 3, 4, and 5 show the detailed distribution of pheromone values, road fitness scores, and the roulette wheel for all roads for 3 scenarios according to RL, RFL, RSC, and evaporation rate. To demonstrate the proposed OF-EACO working style, 5 road segments from road 1 to 5 are depicted. Figure 9 helps to closely follow the concept of OF-EACO.
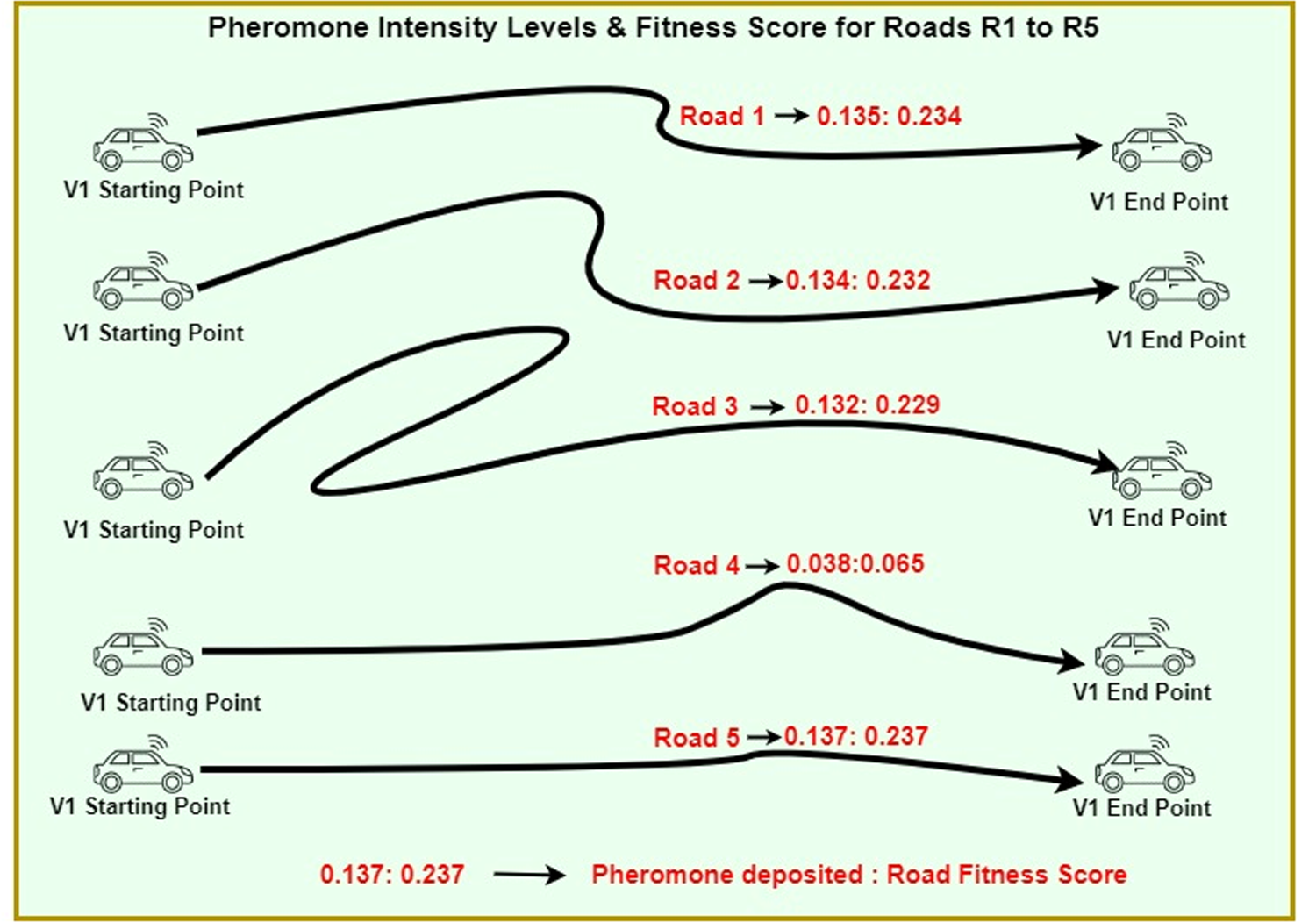
Pheromone intensity levels and fitness scores for roads.
The fitness function computes RFS for each road according to 
The roulette wheel concept is deployed for optimal road selection. An optimal road implies a short-length road with low vehicle density and low signal count. According to Pencheva et al. (2009), fitness scores are used as input to a roulette wheel to make optimal decisions. From the availability of roads, the optimal road for travel is selected. The roulette wheel applies a fitness-proportional mode of selection, which gives high priority to selecting high fitness scores. In this work, 
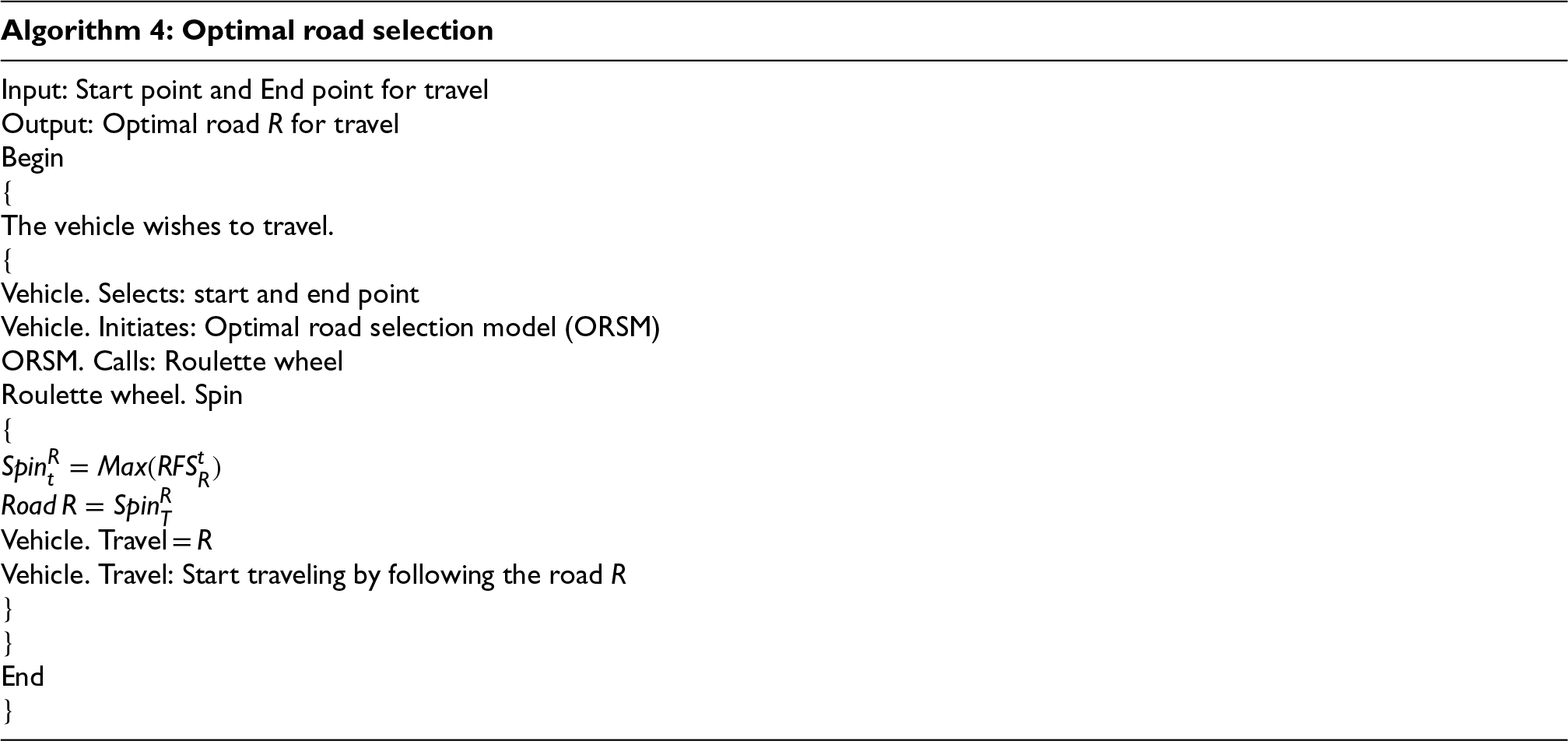
Figure 10 depicts the optimal path selected for scenario 1 (
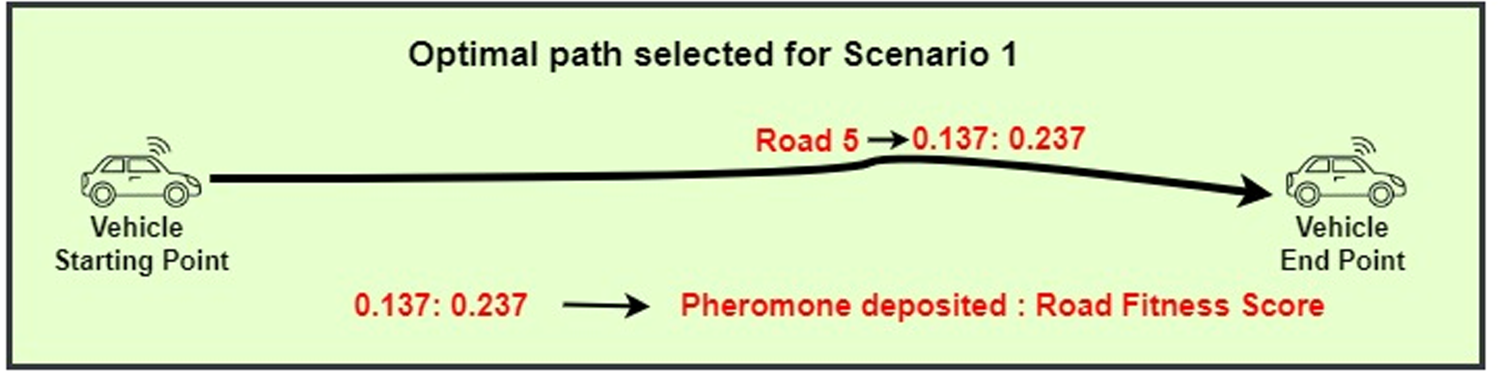
Optimal road selected for scenario 1 (
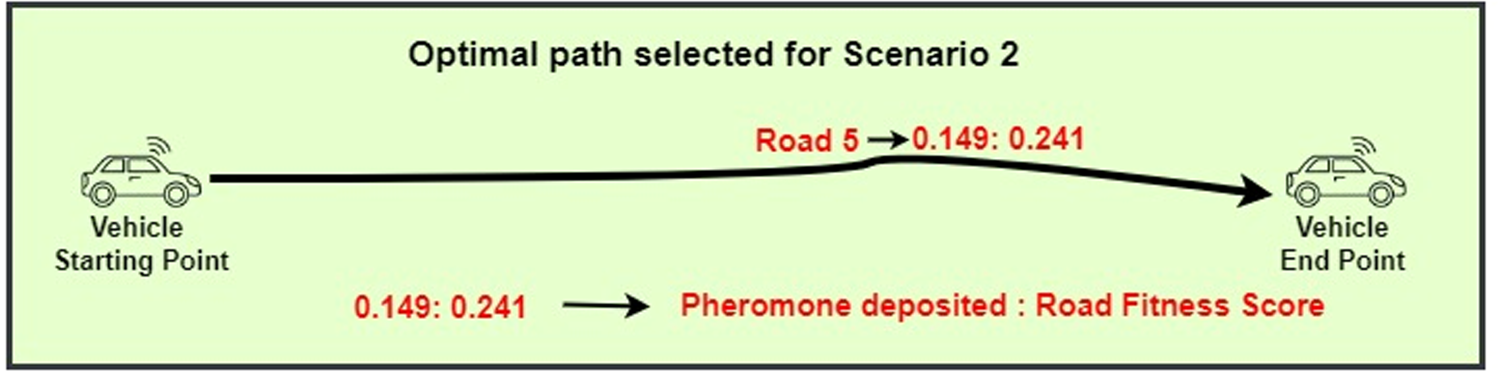
Optimal road selected for scenario 2 (
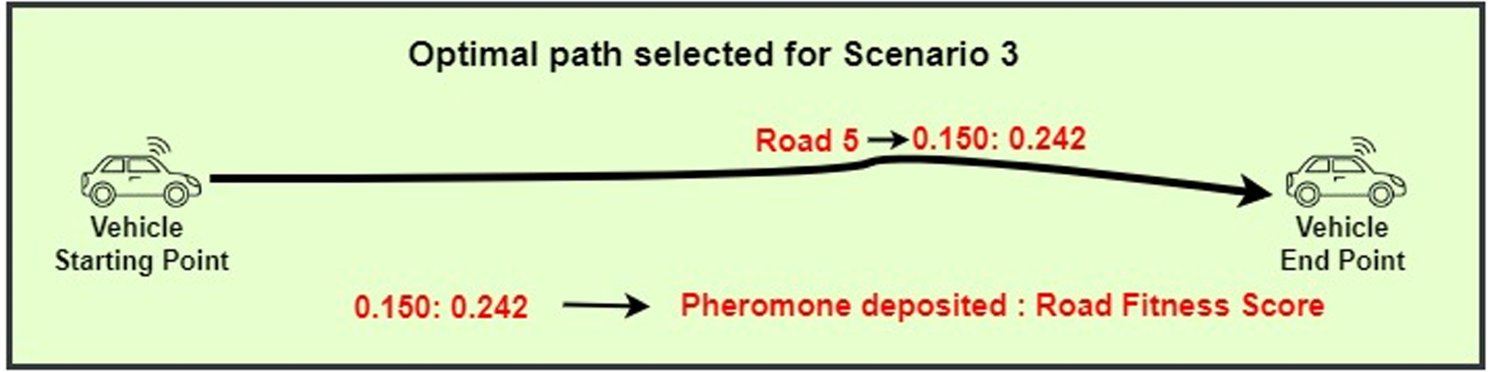
Optimal road selected for scenario 3 (
Environment for Simulation
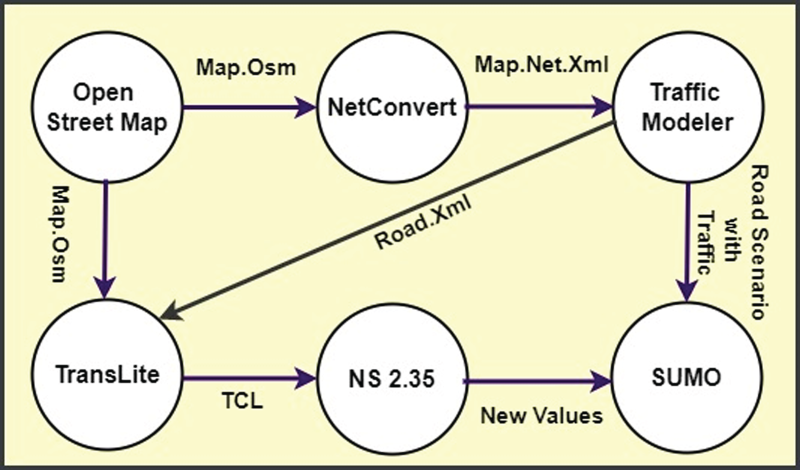
This partition provides the simulation background. The proposed OF-EACO and existing works like IDBACOR and VMR-ITS are simulated in Network Simulator (NS 2.35) using C++ and interpreter- OTcl (Object Tool Command Language) (Nawej et al., 2021; Ramamoorthy et al., 2022). In communication networks, NS 2.35 is widely used to simulate routing protocols/schemes. The open-source and event-centric nature of NS 2.35 provides extensive support for protocols to simulate bio-inspired behavior. A mobility model, such as MOVE (Mobility Model Generator for Vehicular Networks), generates the road scene for an IH-VANET.MOVE is built on the Java programming language. MOVE is based on SUMO 1.21.0 (Simulation of Urban Mobility), which simulates urban transportation. SUMO supports an open-source mode for the simulation of road traffic. NS2.35, in collaboration with SUMO, OpenStreetMap, and MOVE, enables the modeling of an IH-VANET network for proposed OF-EACO, IDBACOR, and VMR-ITS.
In this view from OpenStreetMap, a significant portion of the Hosur city map is downloaded, which is shown in Figure 13. The downloaded map is exported as Extensible Markup Language (XML) formatted files (map.osm) to create real-time road segments. Netconvert takes the roadmap placed on the map.Osm documents and produces the SUMO infrastructure using the map.Osm for use in map.net.xml. The corresponding scenario in SUMO is shown in Figure 14. Traffic Modeler uses map.net.xml to generate the traffic network and road.xml. The traffic modeler is a graphical user interface program that simulates vehicle traffic. Corresponding Vehicular traffic on the street graph is shown in Figures 15 and 16. TraNSLite converts traffic scenarios for NS 2.35 into executable packages in terms of trace files as per SUMO. The activity of collecting data from NS2 is associated with the simulation execution. During execution, NS2 generates a trace file (.tr). The .tr file records all the actions that take place in the simulator in chronological order as event types. Event type files include send(s), receive(r), drop(d), forward(f), time stamp, beacon ID, packet ID, vehicle ID, beacon size, and packet size, etc. These event type files serve as data sources for the data extraction process. AWK scripts are used in the data extraction process to parse the .tr files to estimate performance metrics.
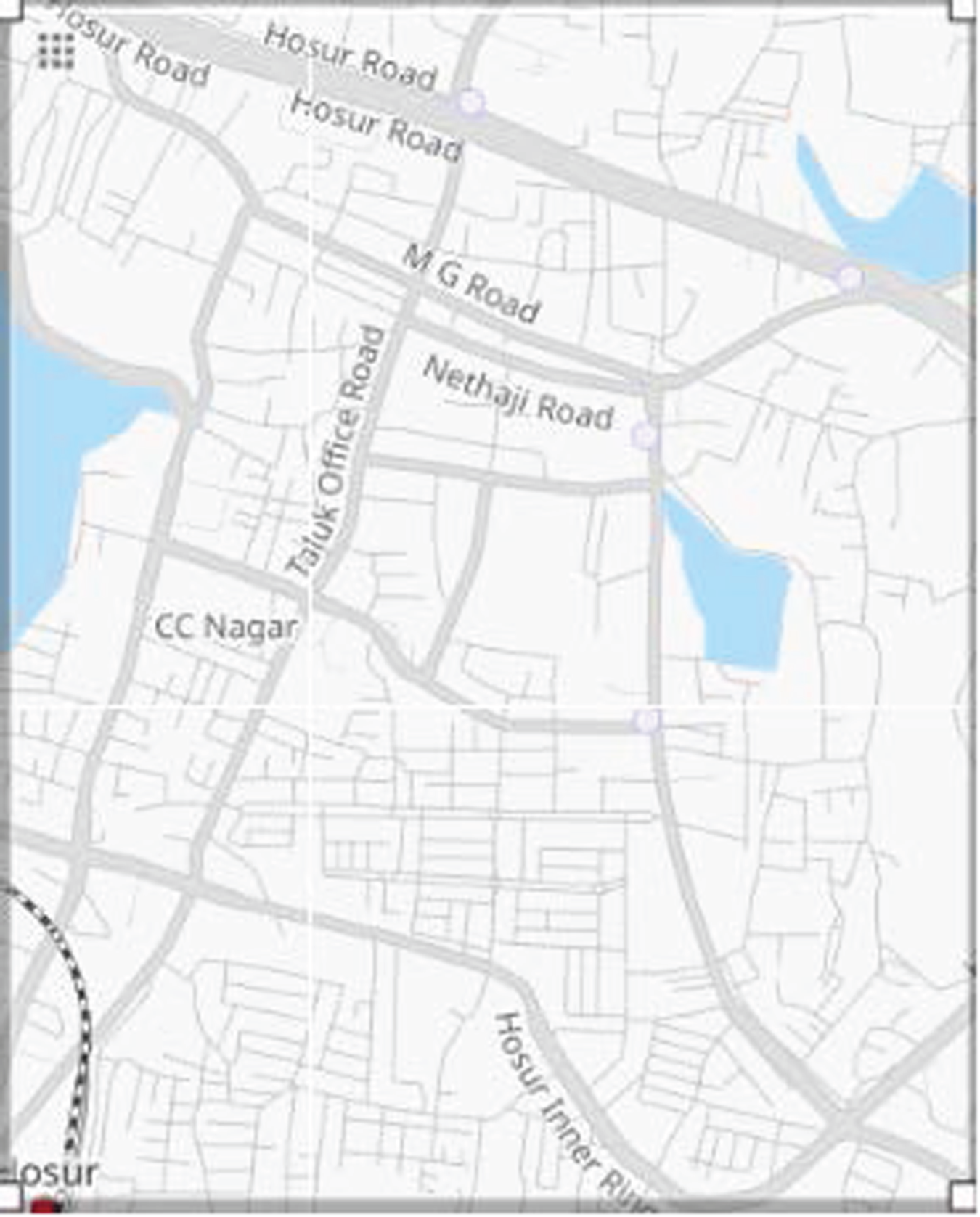
OpenStreetMap of Hosur urban.
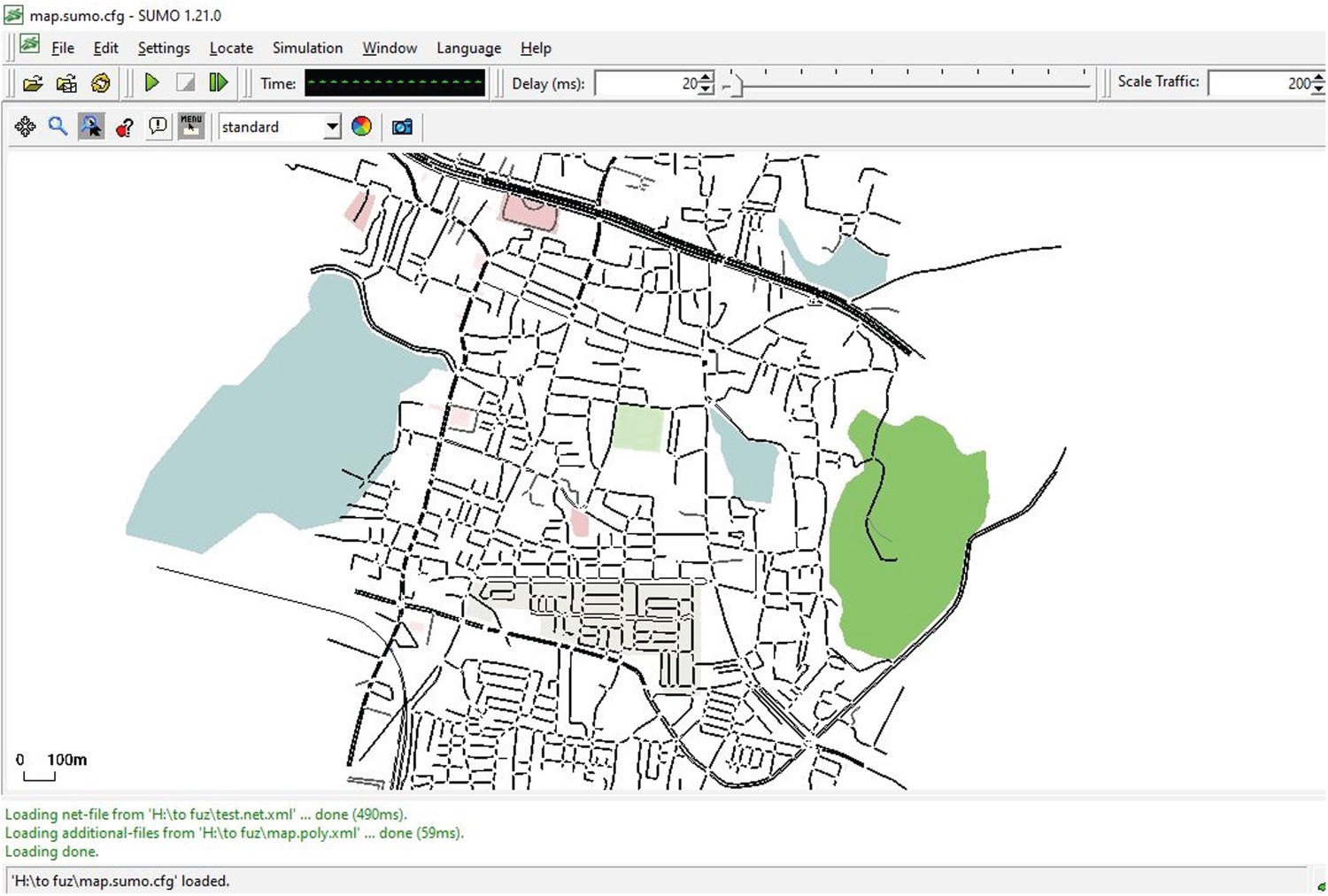
Same Hosur urban map as a street graph in SUMO..
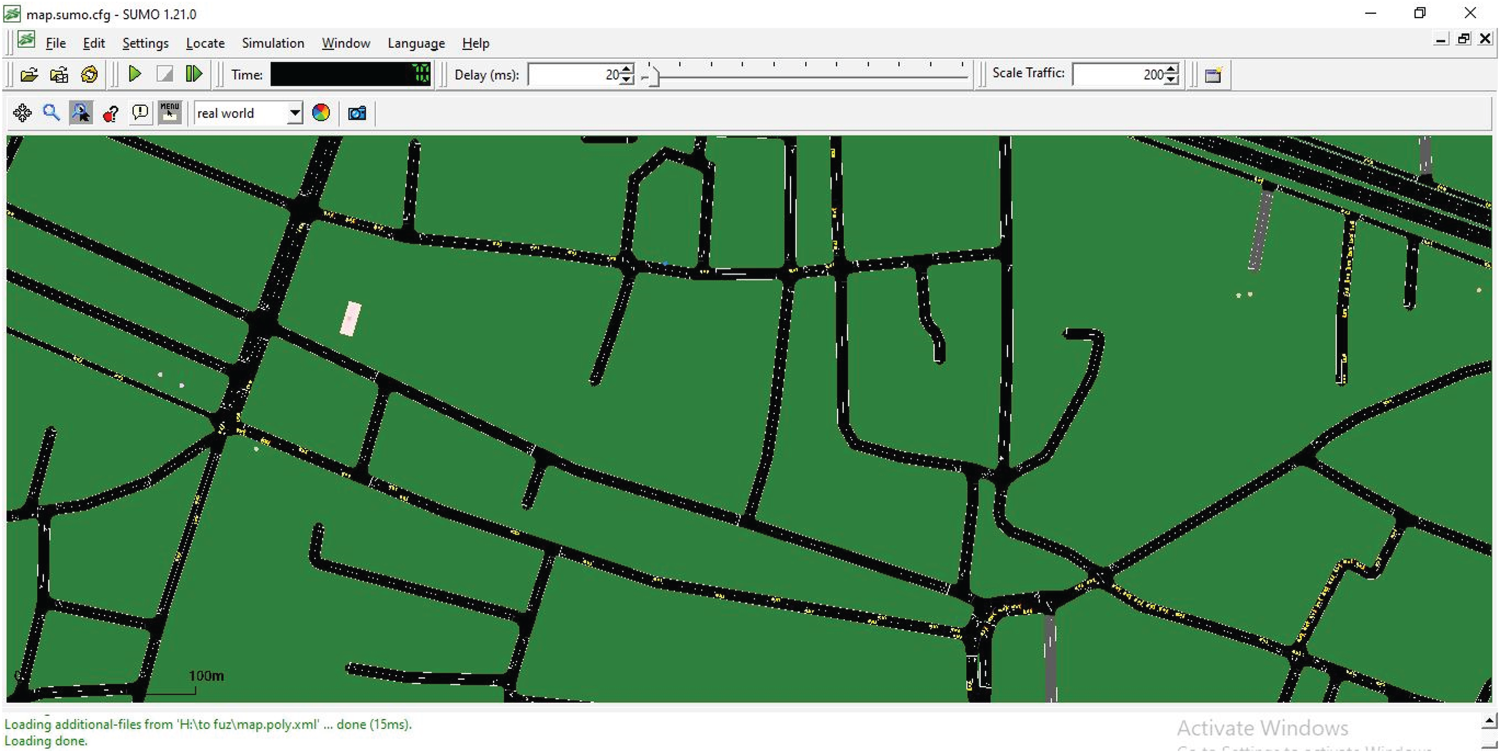
Vehicle traffic in SUMO.
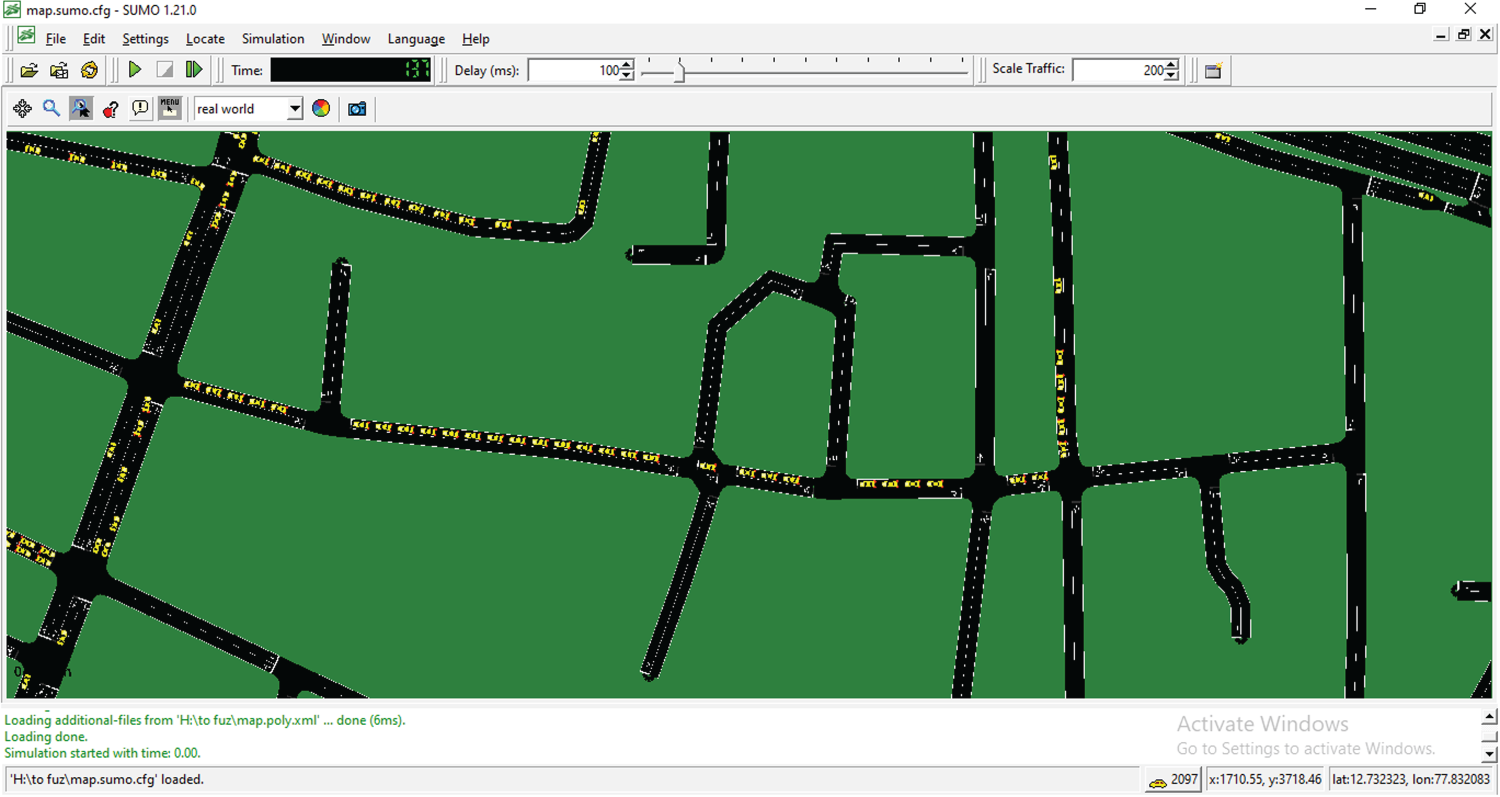
A close-up view of vehicle traffic in SUMO.
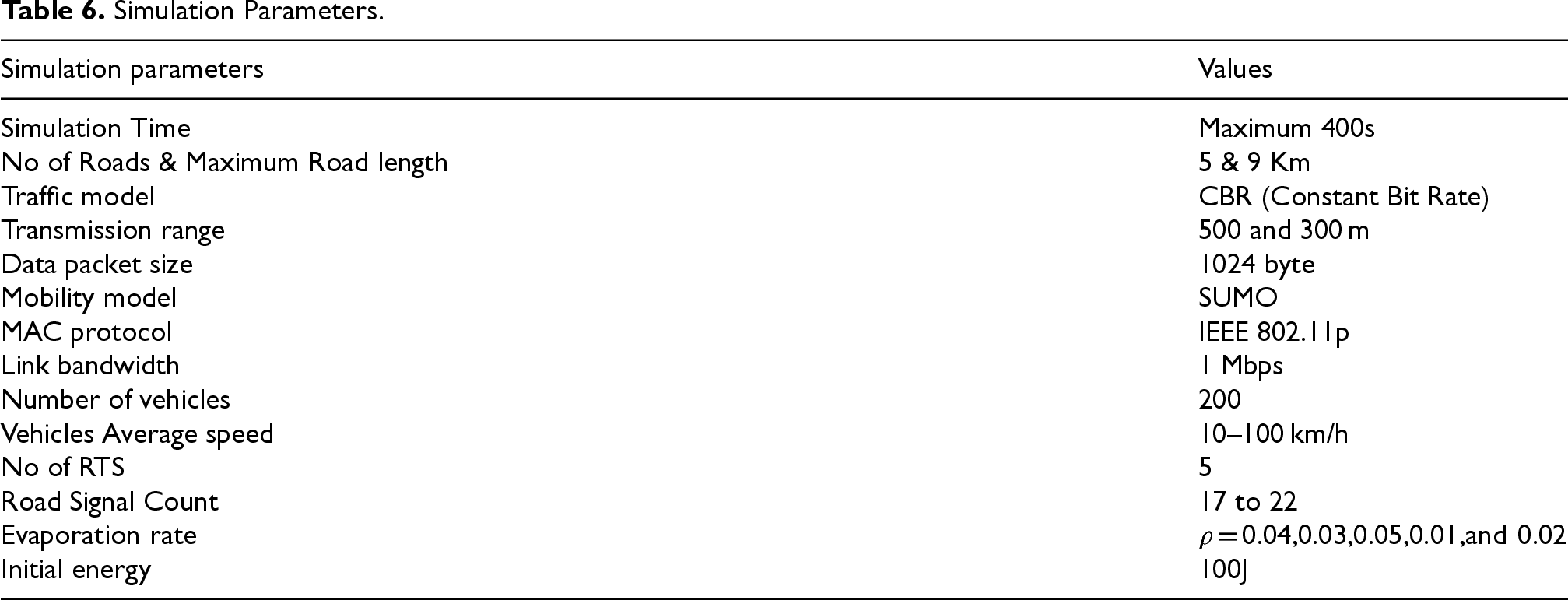
Figure 17 depicts the simulation steps used for simulating the proposed OF-EACO and existing works. For simulation, urban road scenarios with different length variations up to 9 km and vehicles with minimum and maximum speed limits of 10–100 km/h are considered. One-lane urban roads with an RTS count of 5, a maximum of 200 vehicles, and different variations of road signals ranging from 17 to 22 are considered for simulations. The transmission range of RTS is fixed at 500 m and 300 m for vehicles and road signals. The beacons are propagated with a size of 1024 bytes. For the simulation, a pheromone is deposited, and significant evaporation rates (0.04, 0.03, 0.05, 0.01, and 0.02) are followed to evaluate the proposed work. To characterize the realistic nature of an IH-VANET environment, variations in vehicle count, road length, and signal count are considered. Different variations in all terms help the proposed OF-EACO to prove its suitability in all respects. The proposed OF-EACO and existing works are simulated in NS2 as per Table 6.
Simulation steps followed in the simulation of the proposed OF-EACO and existing works.
Simulation Parameters.
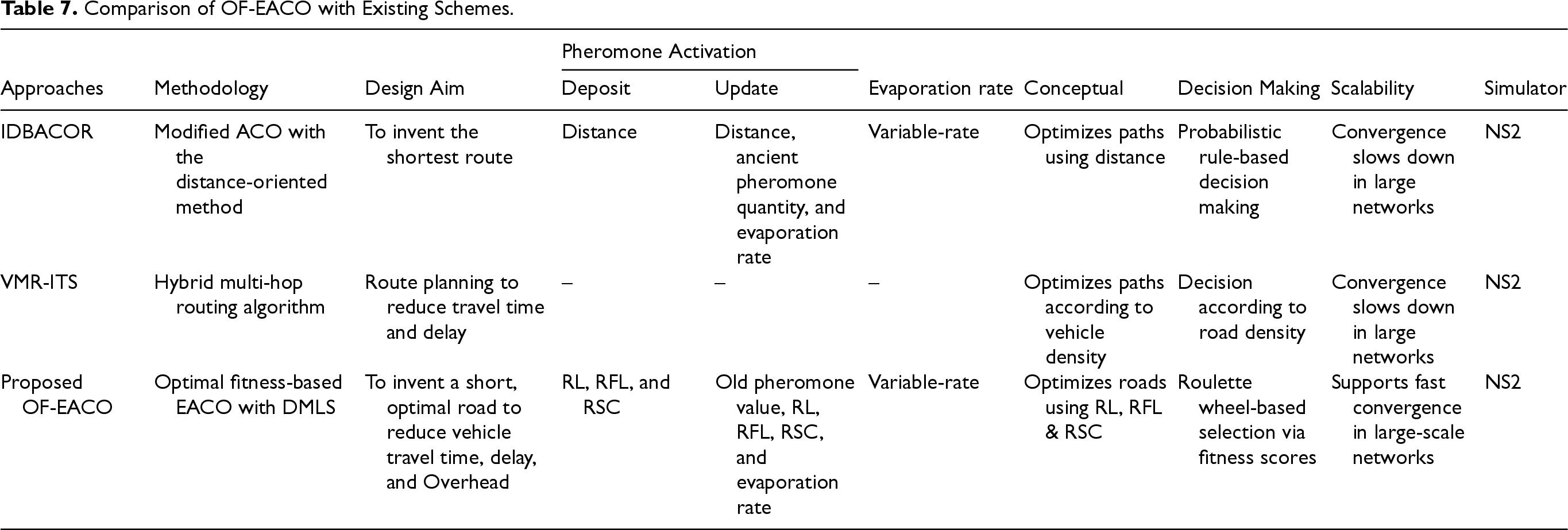
The result section presents the performance of the proposed OF-EACO, IDBACOR, and VMR-ITS. Vehicle Travel Cost (VTC), Road Establishment Time (RET), Convergence speed (CS), Road Traffic Congestion Overhead (RTCO), Routing Overhead (RO), Computational overhead (CO), Computational Complexity (CC), Actual Wall Time Analysis (A-WTA), and Energy Consumption (EC) are the performance metrics used to evaluate the performance of all works. Table 7 shows the comparison of OF-EACO with existing schemes.
Comparison of OF-EACO with Existing Schemes.
Comparison of OF-EACO with Existing Schemes.
The metrics are chosen to align with the proposed OF-EACO goals. VTC directly indicates the optimal road capacity based on travel time and distance, which is essential for IH-VANETs. RET and CS are used to estimate how efficiently OF-EACO picks the best roads under different mobility conditions. To evaluate scalability and communication reliability, RTCO and RO are included. CO and CC are used to assess the computational feasibility of OF-EACO. A-WTA estimates the wall time of the approaches. Additionally, EC is selected to measure the precise energy consumption rate of the approaches. Collectively, all these metrics offer a thorough and justified basis for performance evaluation.
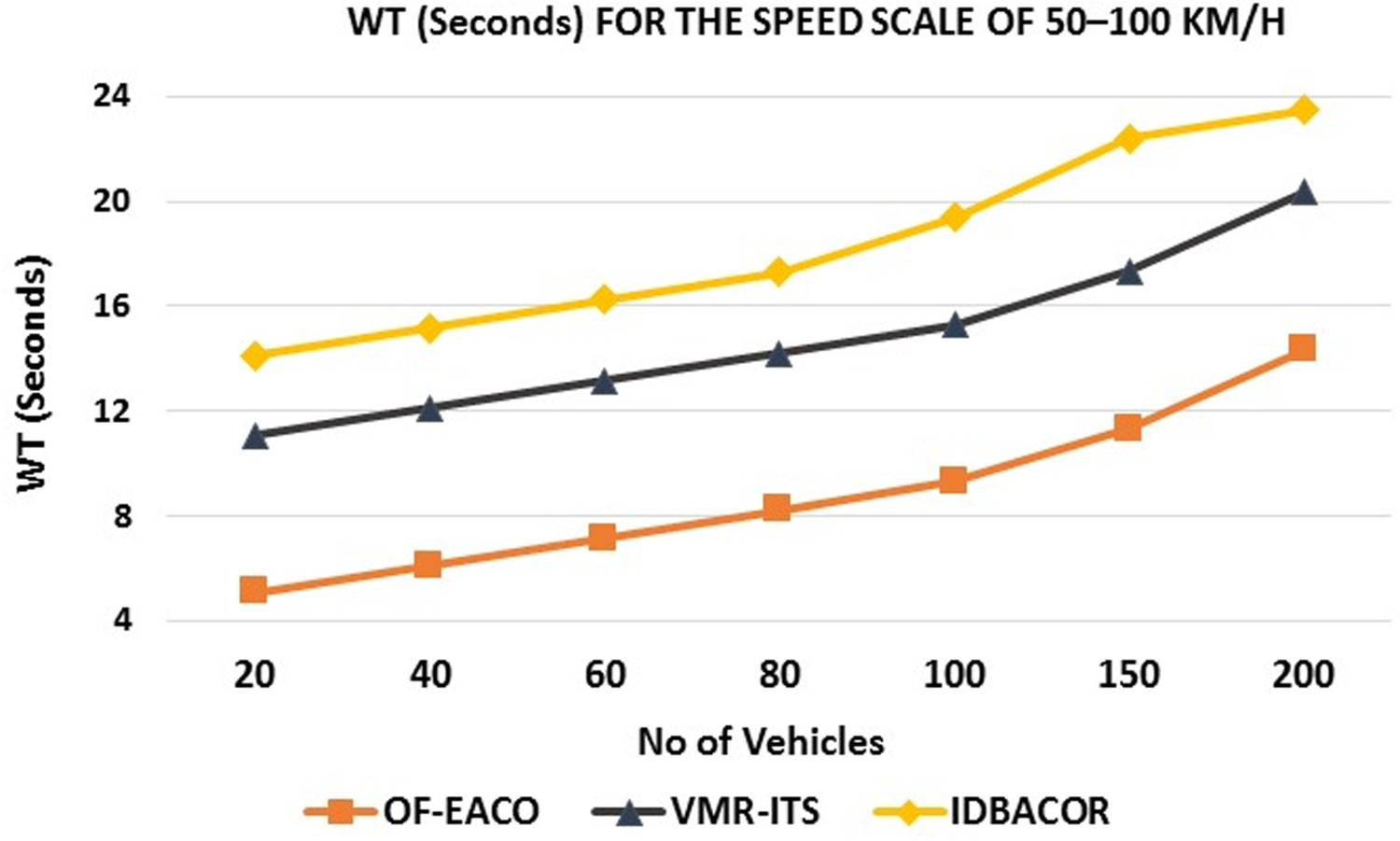
Vehicle Travel Cost (VTC) indicates the total time taken by the vehicle to complete the journey between the start and endpoints. VTC is measured in seconds. Mathematically, VTC can be defined as

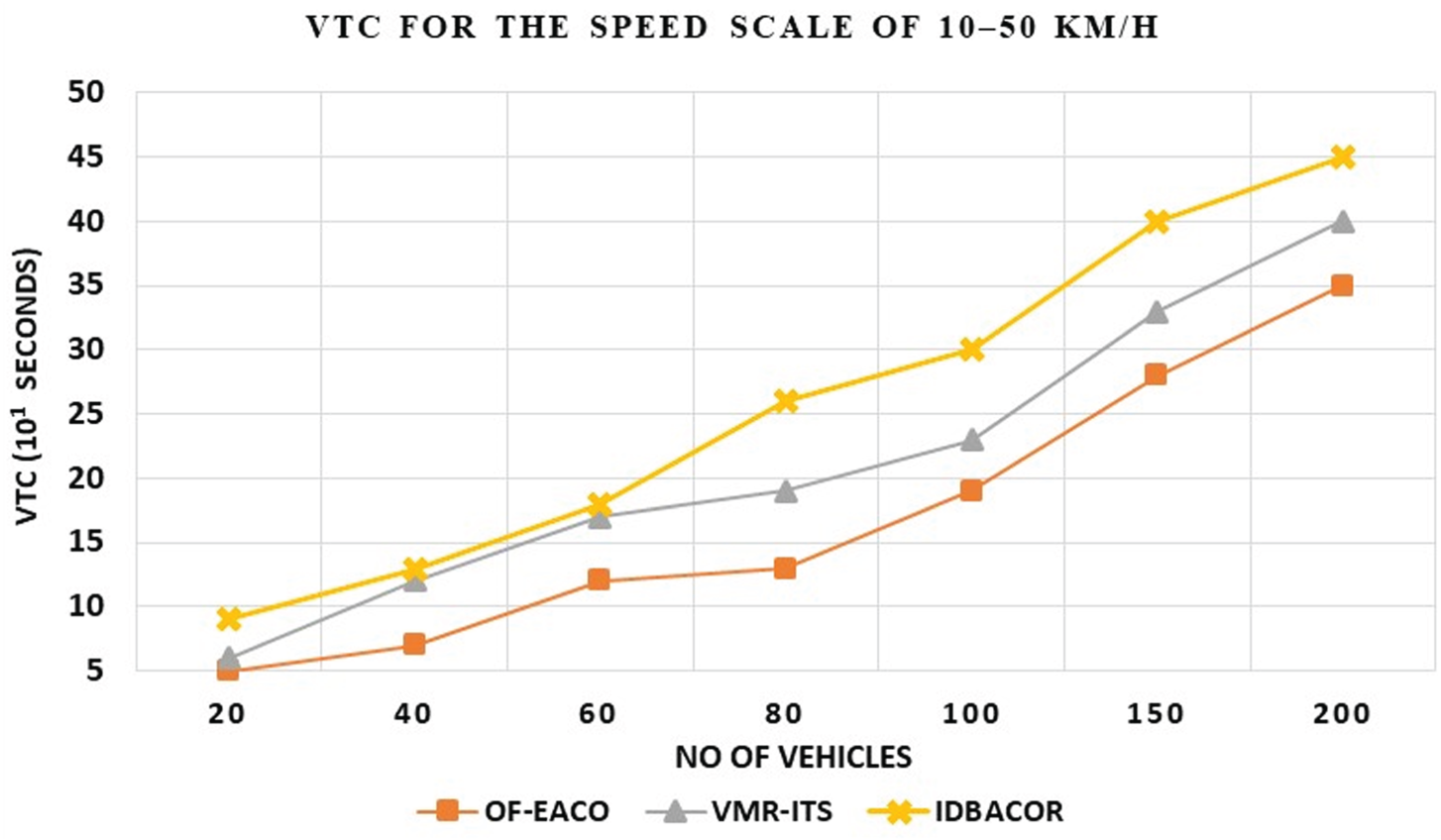
VTC for 10–50 km/h speed scale.
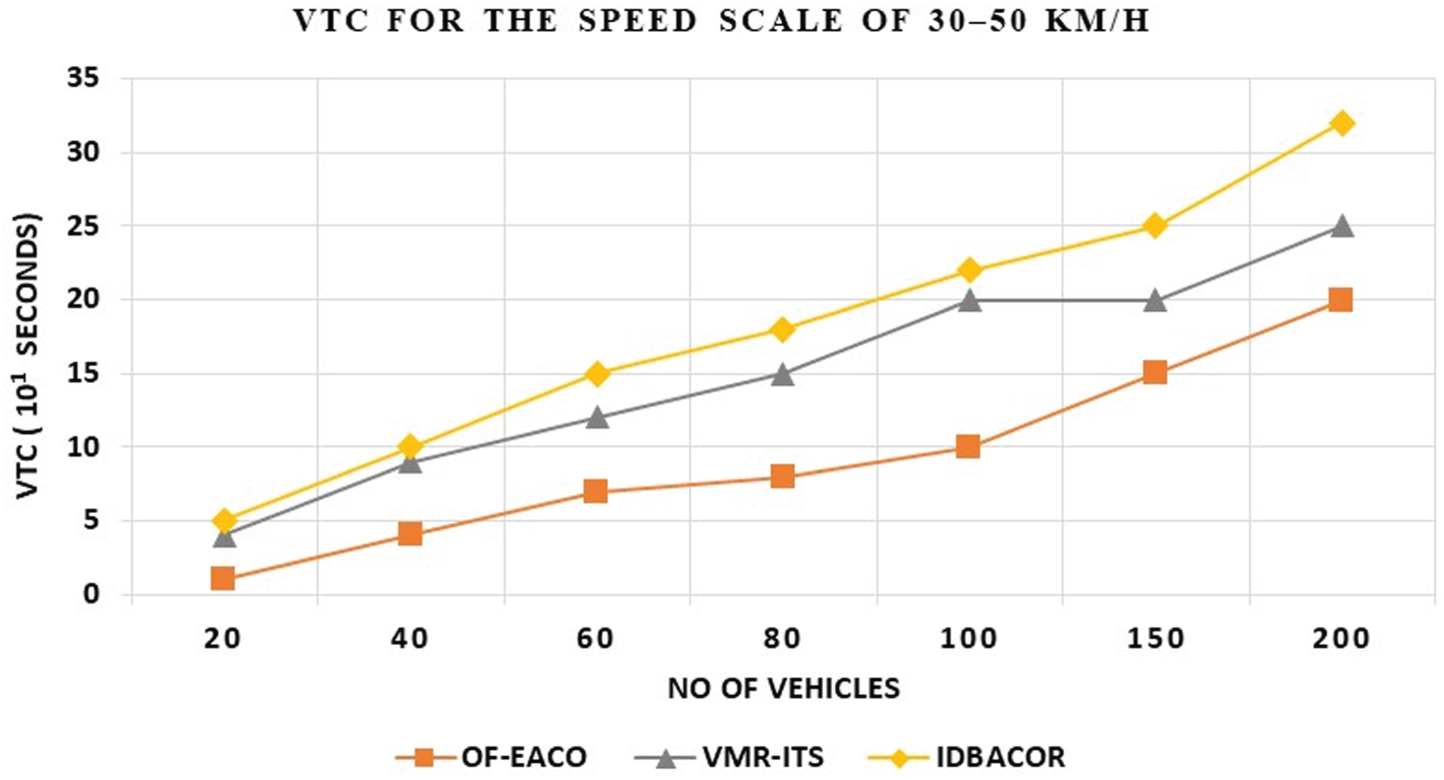
VTC for 30–50 km/h speed scale.
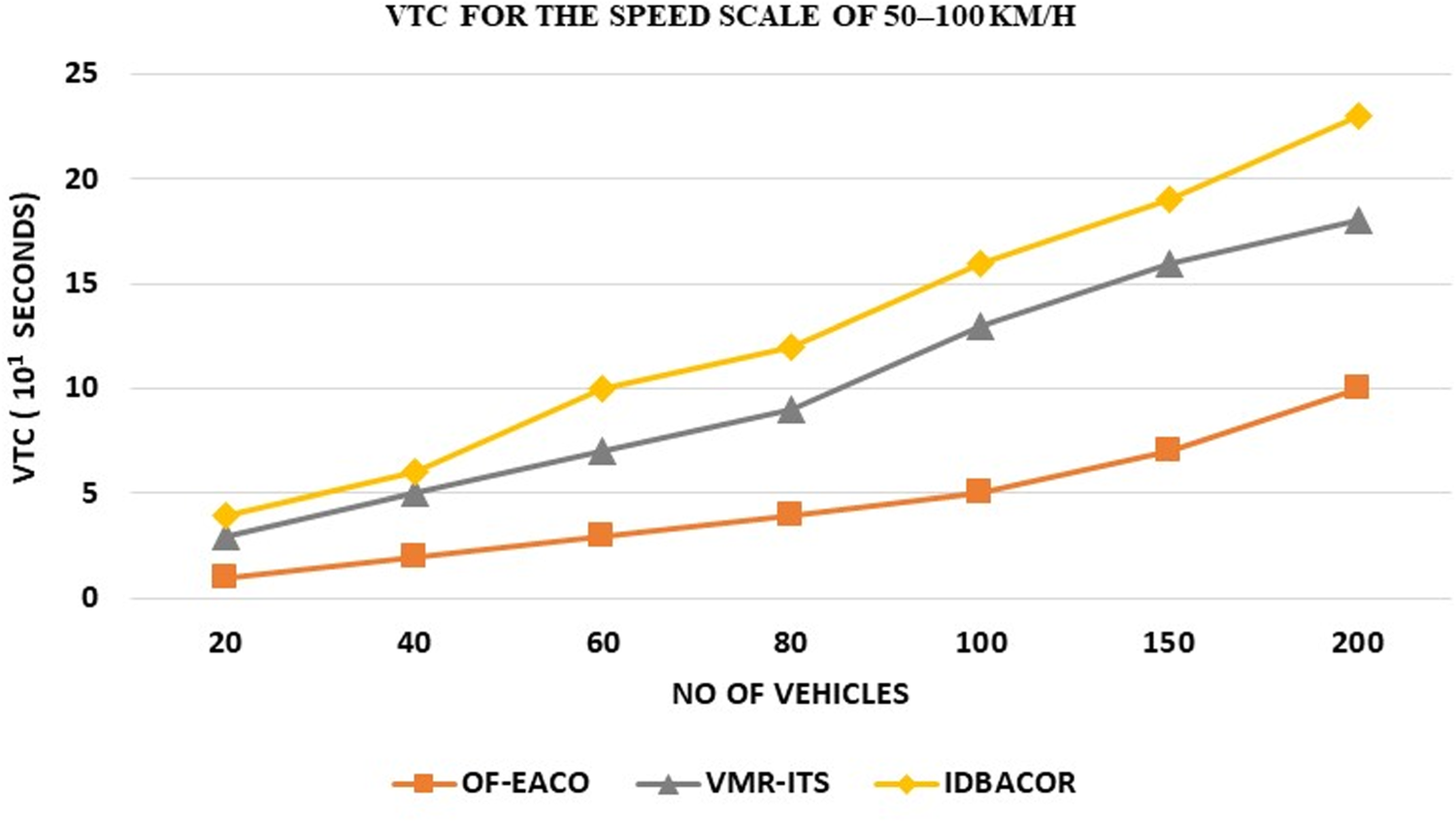
VTC for 50–100 km/h speed scale.
choosing the optimal route without congestion, which shows better results in VTC for VMR-ITS.IDBACOR applies a distance-based method that finds the distance of the path and assigns a pheromone according to the distance. IDBACOR is not configured to find the route according to the vehicle density and other important parameters, which takes more time for vehicles to reach their destination compared to VMR-ITS and the proposed OF-EACO. Using a vehicle traffic server in VMR-ITS guides the vehicle to choose the optimal route according to vehicle density, but it ignores the road signals installed on the roads for the optimal road selection, which makes the vehicles take a longer time to reach their destination. Furthermore, OF-EACO is enriched in selecting optimal roads through the ORSM module. ORSM takes important parameters like road length, RTS, and RSC count for road selection. ORSM applies the optimal pheromone to prepare RFS according to RL, RFL, RSC, and evaporation rate. The optimal road is assigned with the highest RFS score. An optimal road refers to a road of short length with low vehicle density and low signal count. The use of RL, RFL, and RSC in the proposed OF-EECO contributed to the reduction of VTC. For the speed scale of 10–50 km/h, OF-EACO reduces VTC by 3% to 4% over VMR-ITS and 7% to 9% over IDBACOR. For the speed scale of 30–50 km/h, OF-EACO gives 5% to 7% better than VMR-ITS and 8% to 10% better than IDBACOR. Similarly, OF-EACO gives 7% to 10% better than VMR-ITS and 11% to 13% better than IDBACOR for a speed scale of 50 to 100 km/h.
Road Establishment Time (RET) refers to the total time taken to establish/find a road from the starting point to the destination. RET is measured in seconds. Mathematically, RET can be defined as

Where
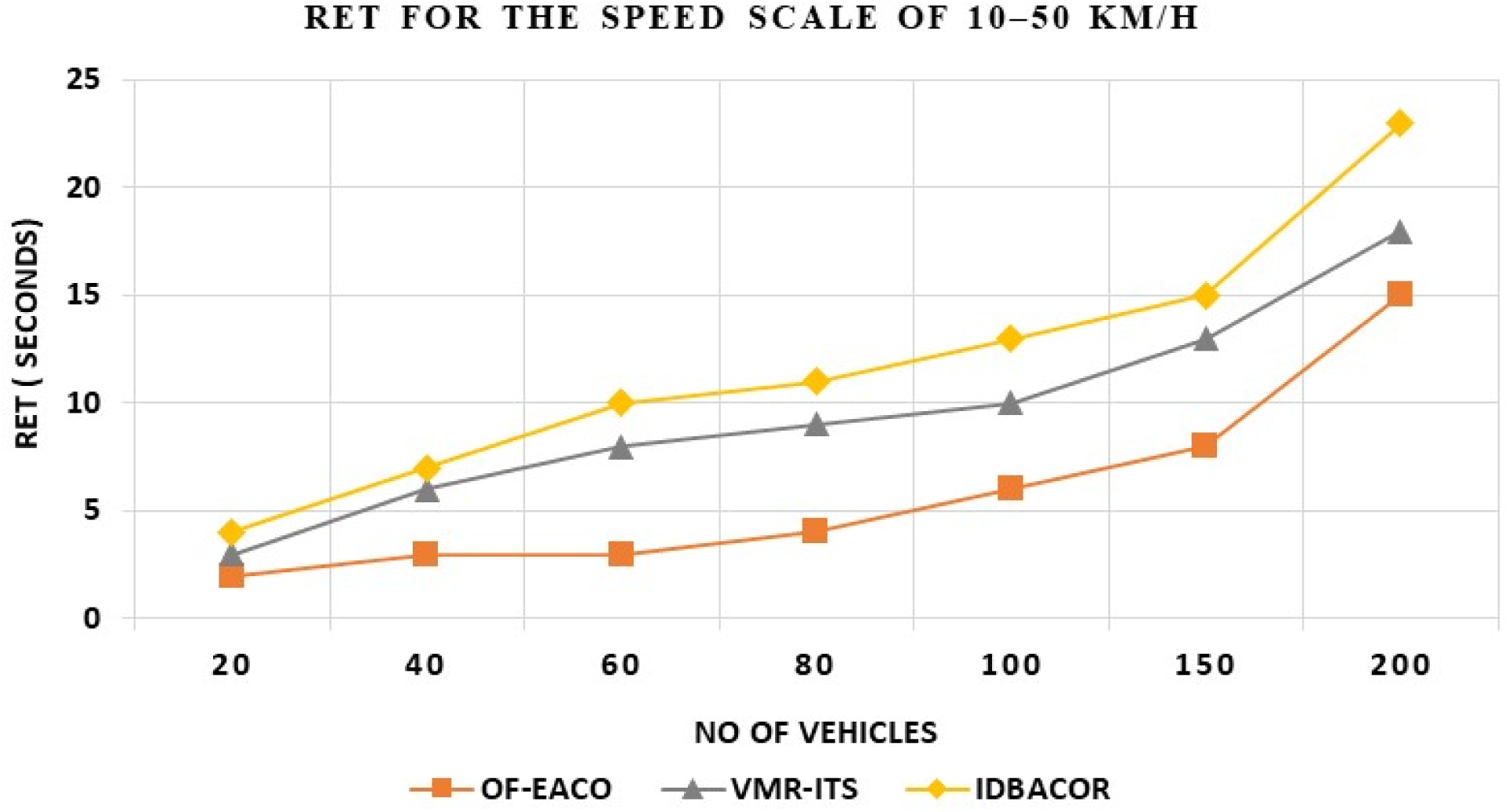
RET for 10–50 km/h speed scale.
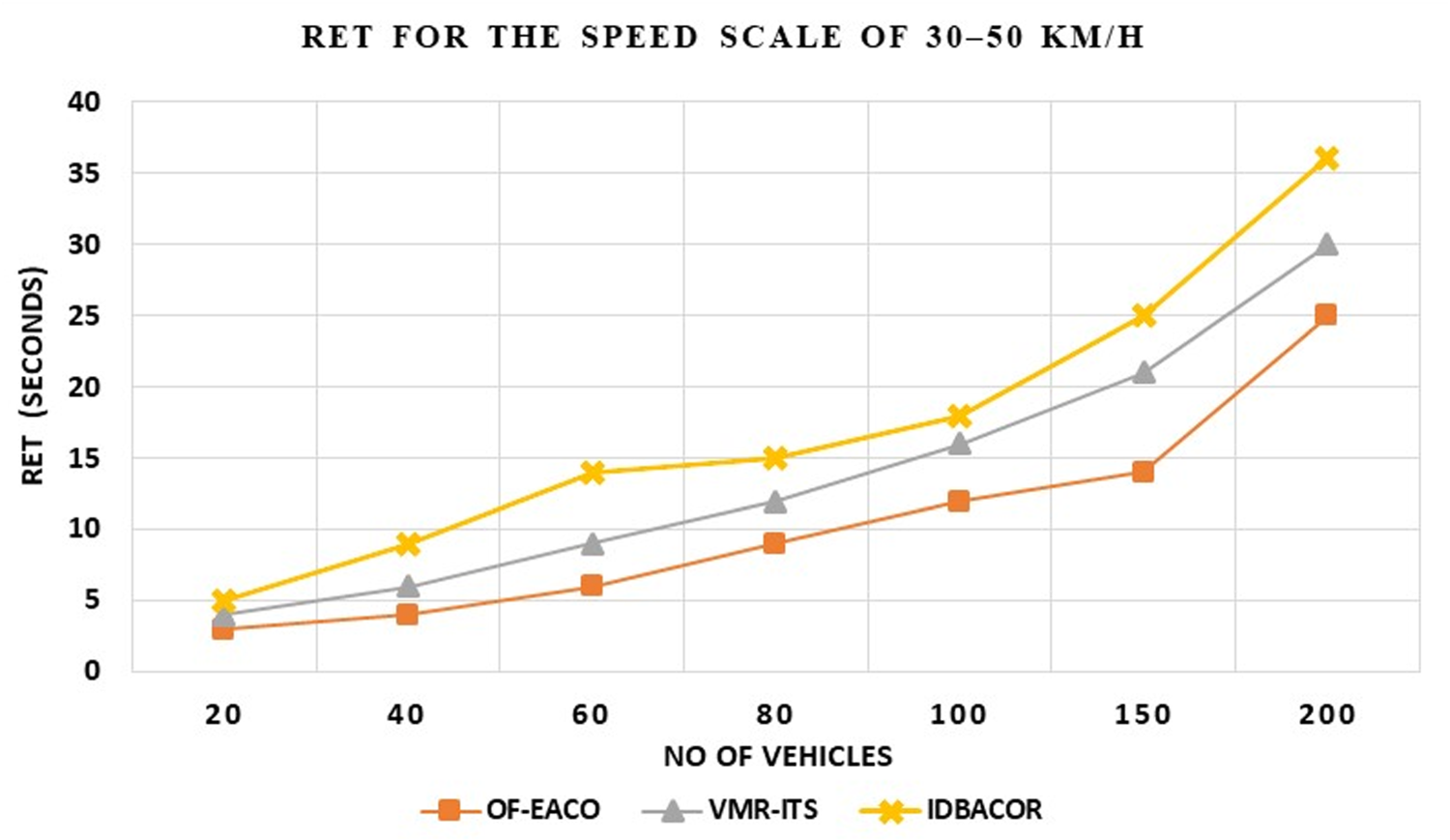
RET for 30–50 km/h speed scale.
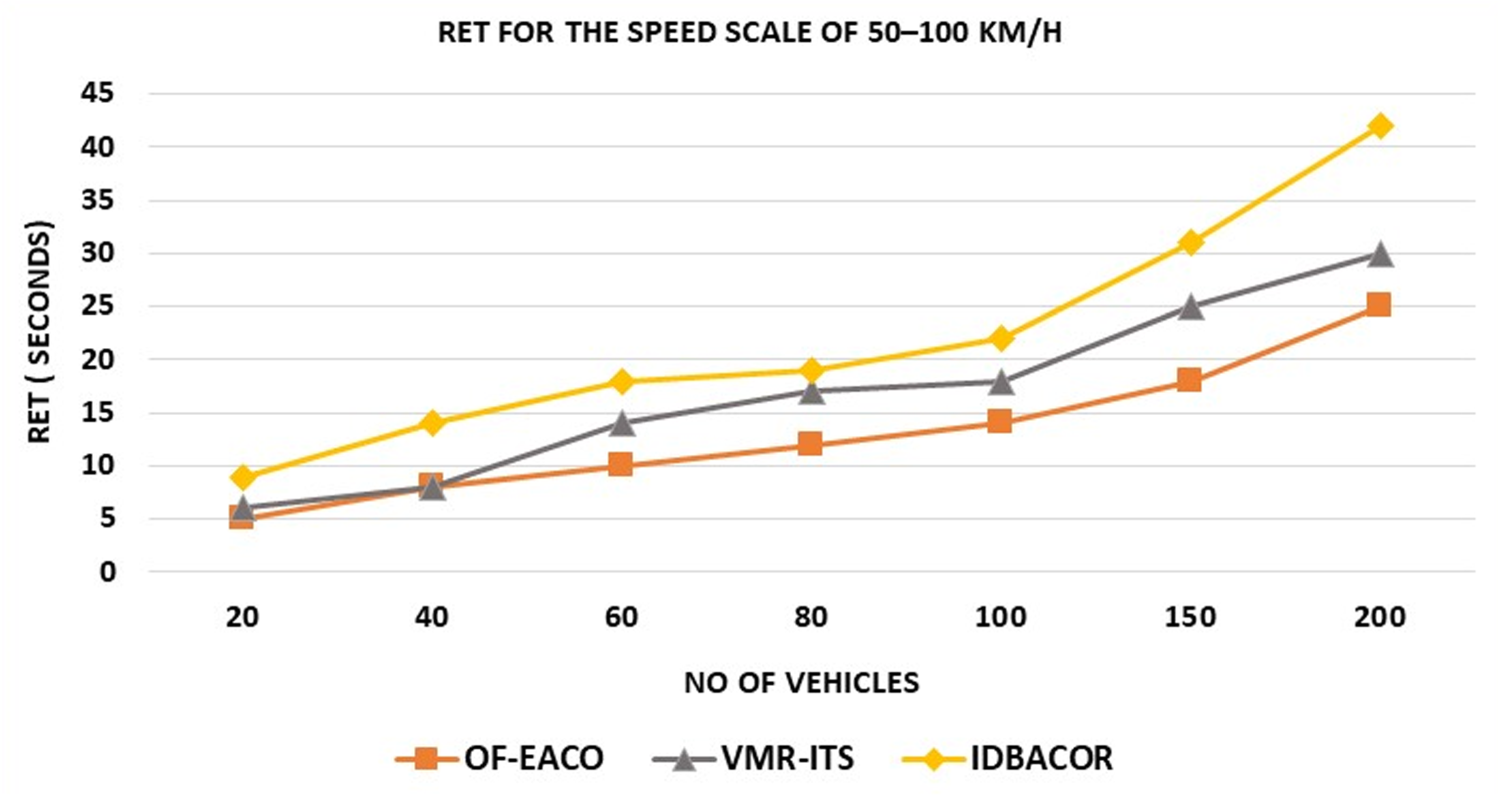
RET for 50–100 km/h speed scale.
The proposed OF-EACO outperforms IDBACOR and VMR-ITS in terms of RET. Pre-implementation of modules like DMLS, RL, RFL, and RSC helps the ORSM module to select the optimal road quickly. The use of the roulette wheel in ORSM facilitates quick road selection according to RFS with less time compared to IDBACOR and VMR-ITS. The roulette wheel concept has also been adopted in IDBACOR, but the EACO in IDBACOR faces significant delays as it requires maximum iterations to complete the task of assigning fitness scores to roads. This delay introduces more time for road selection. Minimum iterations are imposed to update routing information for route selection by using ORSM in the EACO of the proposed work. Similarly, VMR-ITS takes more time to find the road compared to the proposed OF-EACO.VMR-ITS uses the concept of forward and backward communication for route selection, and the route selection process waits to complete a cycle of forward and backward communication, which imposes more time for route selection.
Relatively, the proposed OF-EACO uses ORSM for road selection, which is free from forward and backward communication. Instead of relying on forward and backward communication, the proposed work uses a Roulette cycle to accelerate RET over VMR-ITS. For the speed scale of 10–50 km/h, OF-EACO gives 4% to 7% better than VMR-ITS and 7% to 9% better than IDBACOR. For the speed scale of 30–50 km/h, OF-EACO reduces RET by 3% to 5% over VMR-ITS and 6% to 8% over IDBACOR. Similarly, OF-EACO gives 2% to 3% better than VMR-ITS and 4% to 5% better than IDBACOR for a speed scale of 50 to 100 km/h.
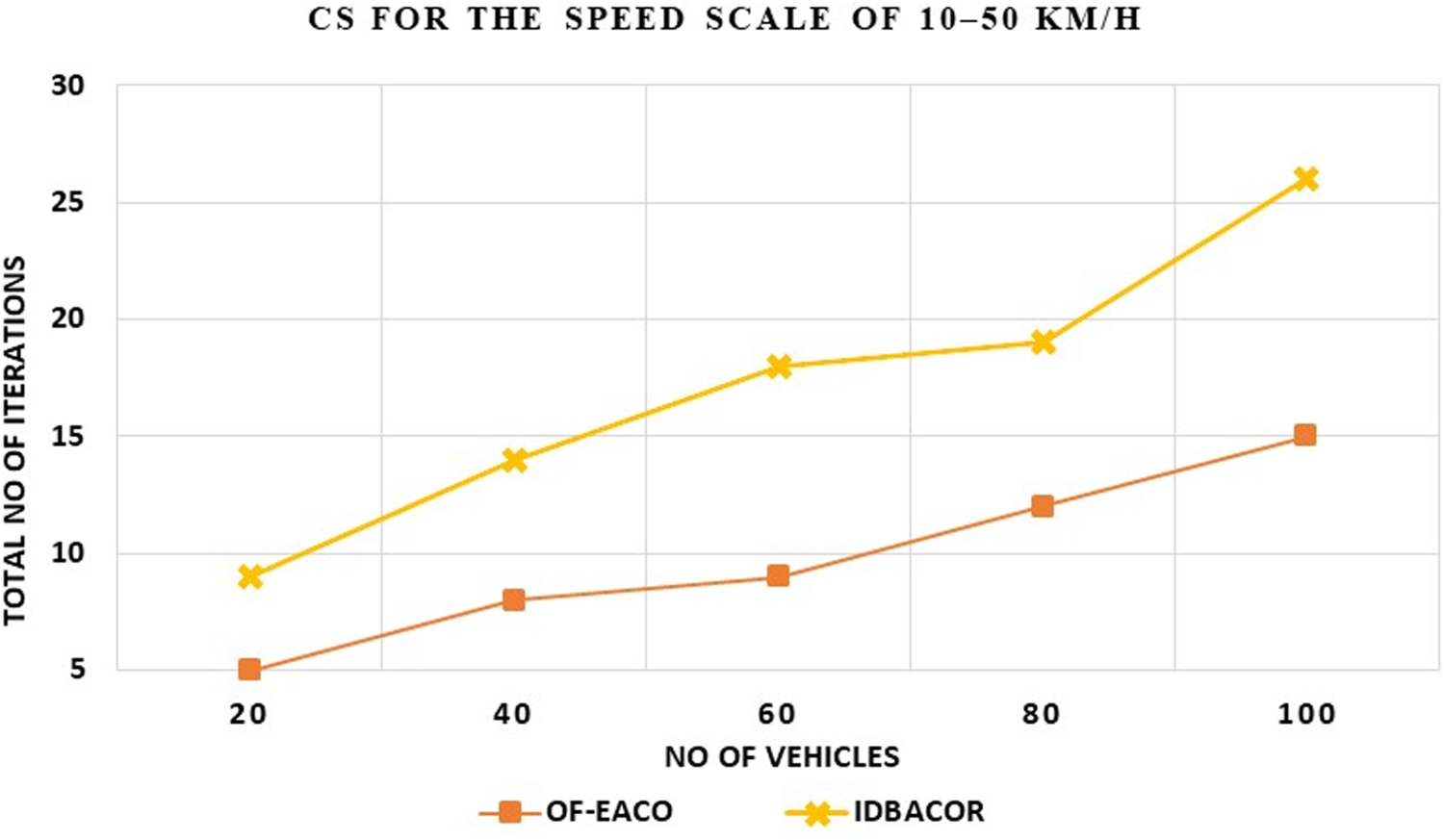
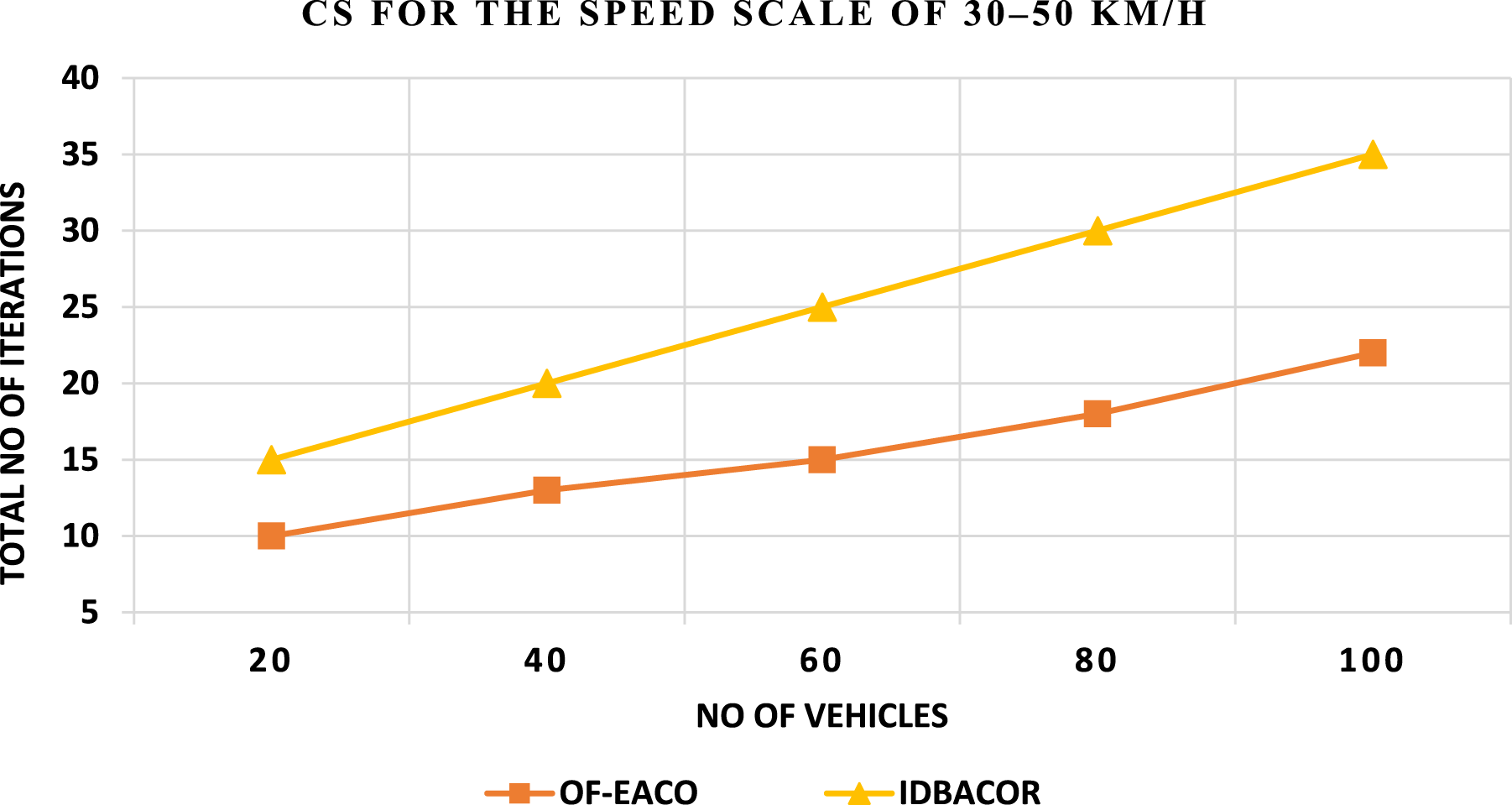
Convergence speed (CS) indicates how fast the algorithm reaches the optimal solution. Important parameters such as repetitions, evaporation rate, pheromone update rule, pheromone stability, and ant movements affect the CS. Mathematically, CS can be defined as

CS for 10–50 km/h speed scale.
CS for 30–50 km/h speed scale.
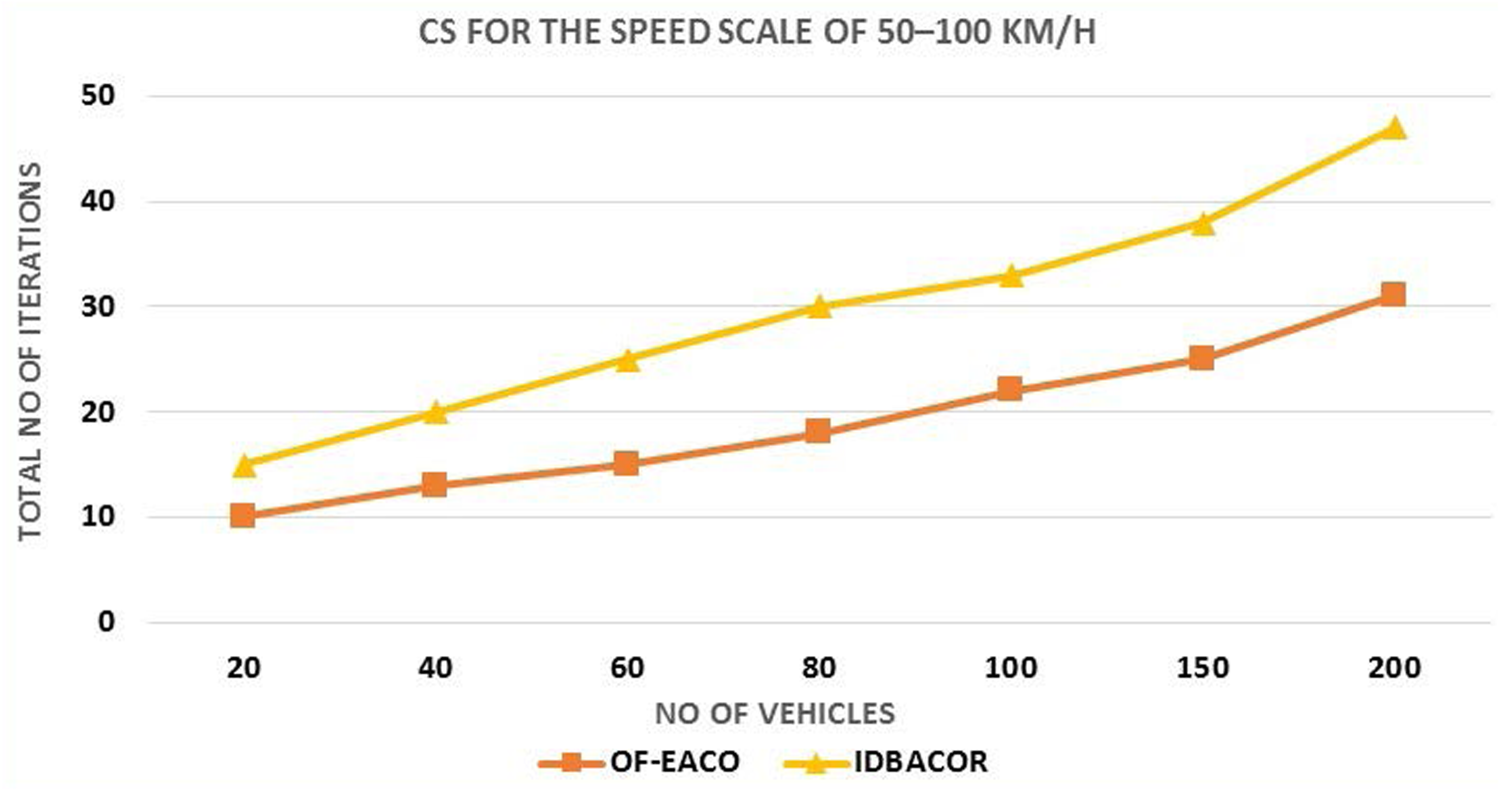
CS for 50–100 km/h speed scale.
For 30–50 km/h, the proposed OF-EACO reaches the optimal solution in 27 iterations, and IDBACOR takes 40 iterations to generate the optimal solution. Similarly, for 50–100 km/h, the proposed OF-EACO reaches the optimal solution in 31 iterations, and IDBACOR takes 47iterations to generate the optimal solution. IDBACOR and the proposed OF-EACO are rich in finding optimal paths, but the convergence speed varies. Using RFS reduces the total number of iterations required by OF-EACO compared to IDBACOR. However, IDBACOR uses a dynamic pheromone update rule, which is subject to exploration problems. The exploration problem raises slow convergence. Furthermore, the proposed OF-EACO uses modified dynamic pheromone update rules to control pheromones on optional roads according to different evaporation rates and RFS. This adaptation makes OF-EACO superior to IDBACOR in terms of convergence speed.
Road Traffic Congestion Overhead (RTCO) refers to the ratio of total congestion delay to total travel time. Total travel time denotes the duration spent on the road by the vehicle to reach its destination, while total congestion delay signifies the extra time consumed on the road due to congestion/traffic at a given time “t”. Mathematically, RTCO can be expressed as


Figures 27, 28, and 29 clearly show that the RTCO of the proposed OF-EACO is very low compared to VMR-ITS and IDBACOR for the speed scale of 10–50 km/h (Figure 27), 30–50 km/h (Figure 28), and 50–100 km/h (Figure 29). In the proposed OF-EACO, the optimal road is selected from the available “n” roads as per RFS. RFS was prepared for each road according to its pheromone values. The road with high RFS is an optimal shortest path with low vehicle density and signals. EACO's ORSM selects the optimal road according to the RFS to support the lowest RTCO.
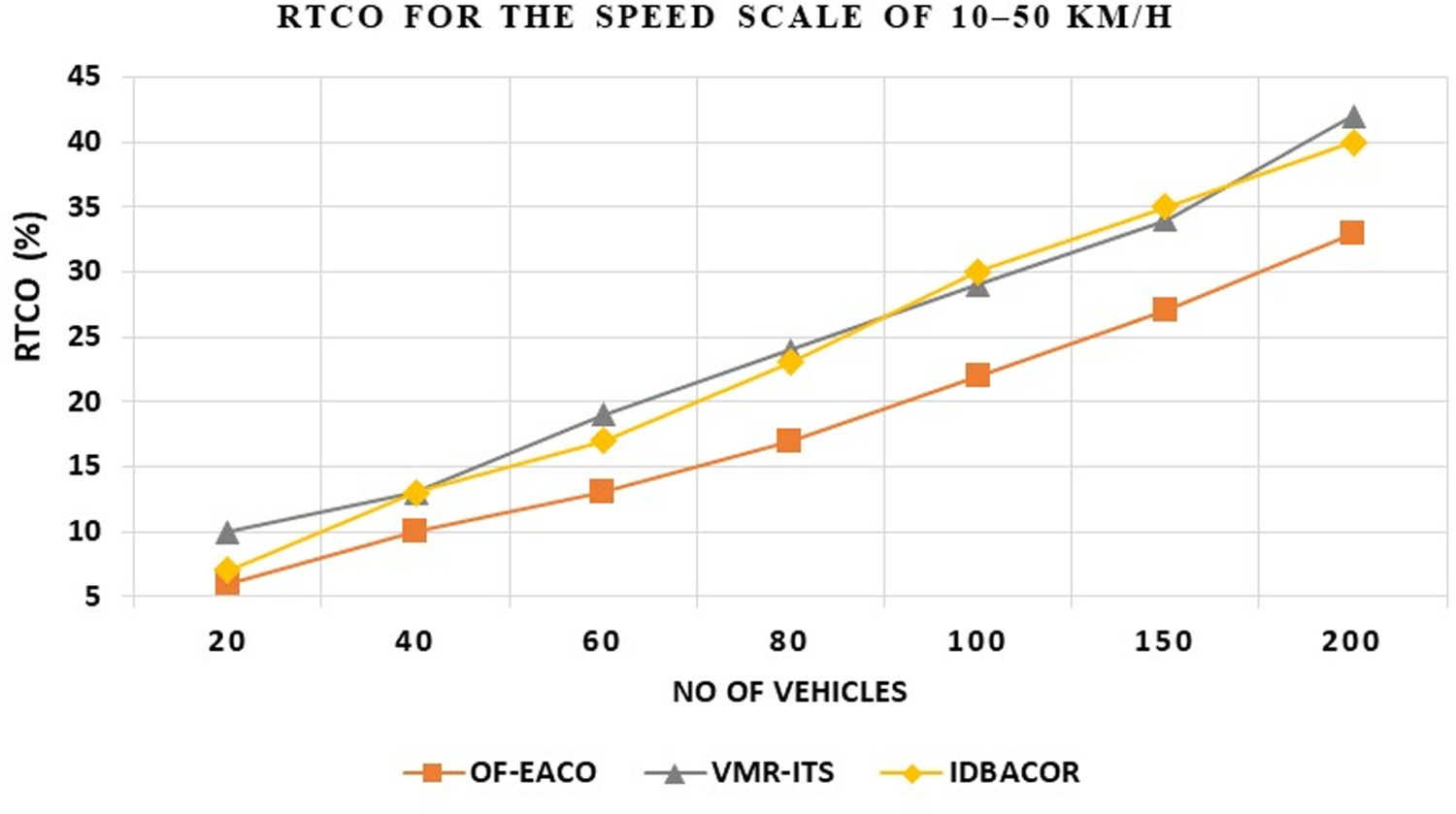
RTCO for 10–50 km/h speed scale.
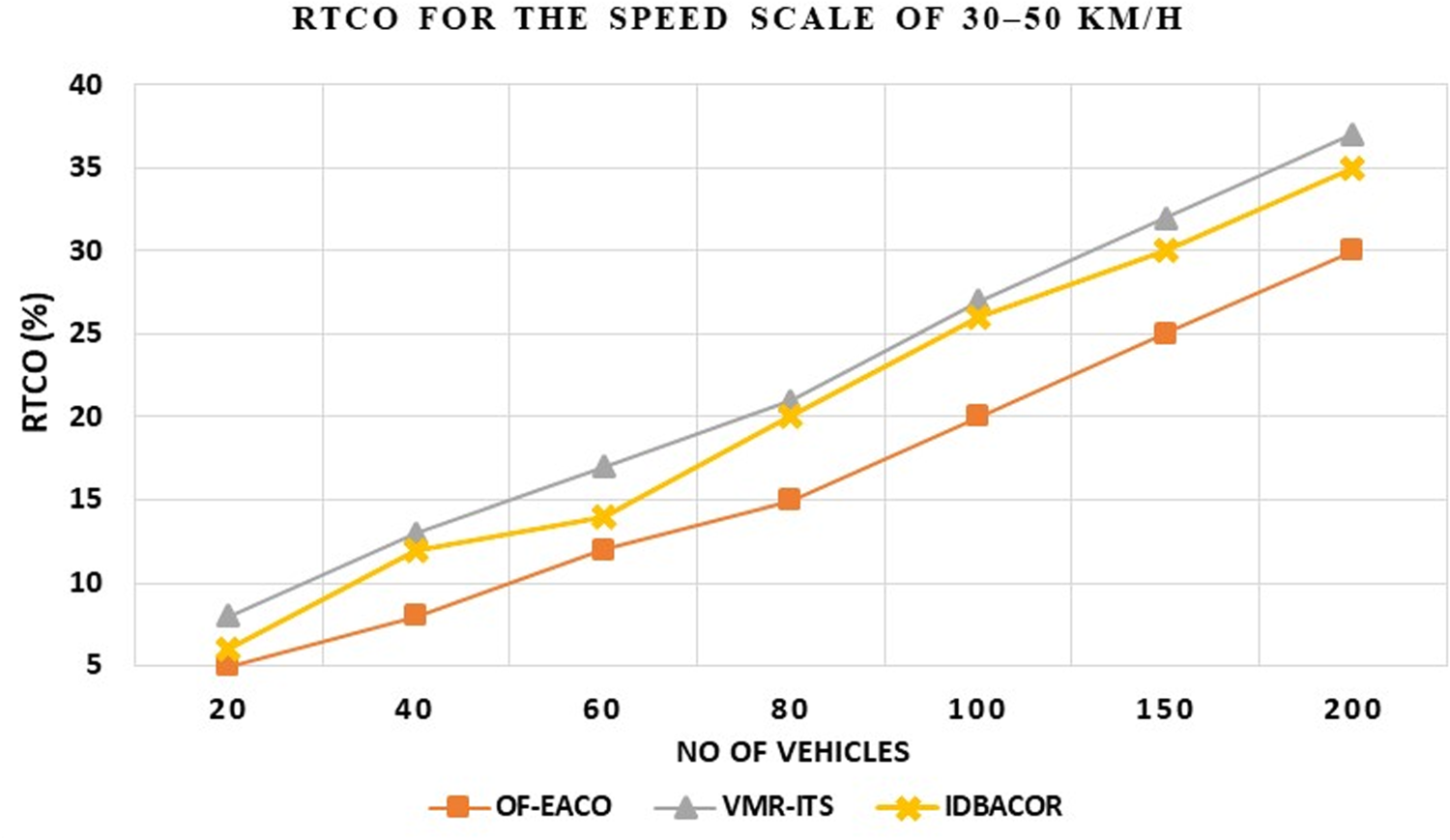
RTCO for 30–50 km/h speed scale.
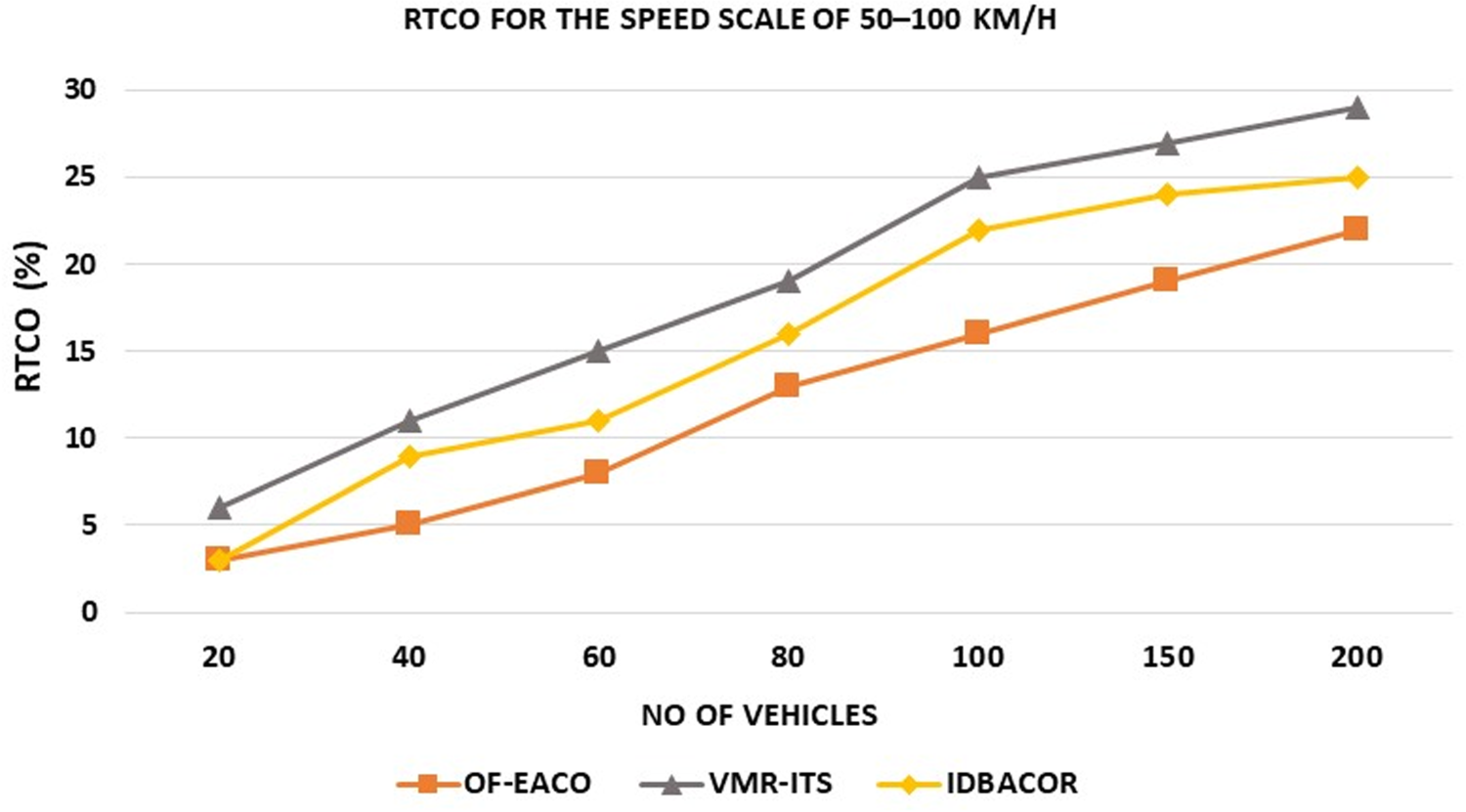
RTCO for 50–100 km/h speed scale.
Similarly, IDBACOR chooses the optimal road, which is the shortest-length road for travel, but fails to consider the level of road density and traffic signals. This observation in IDBACOR increases the total travel time and total congestion delay. IDBACOR focuses only on selecting the shortest route in terms of length without considering vehicle density and other information. However, VMR-ITS supports vehicle traffic servers to manage traffic information to guide path-planning algorithms to provide low traffic overhead. At best, VMR-ITS focuses on vehicle count and signal units regardless of route length. Compared to the proposed OF-EACO, VMR-ITS introduces a little RTCO. For the speed scale of 50–100 km/h, OF-EACO records 2%-4% RTCO, while VMR-ITS records 3%-7% and IDBACOR records 4%- 8%. For the speed scale of 30–50 km/h, OF-EACO records 3%-6% RTCO, while VMR-ITS records 5%-10% and IDBACOR records 5%- 9%. Similarly, OF-EACO registers 4% to 7% RTCO and VMR-ITS, and IDBACOR registers 8% to 13% and 10% to 14% at speeds of 10 to 50 km/h.
Routing Overhead (RO) is the ratio of total routing packets to the maximum allowable control and road explorer ants. Routing packets represent Advertisement Beacon (AB), Registration Beacon (RB), Hello Beacon (HB), Pheromone Credit/Update messages (
Using fewer control packets to discover routes registers a lower RO for VMR-ITS compared to IDBACOR. For the speed scale of 50–100 km/h, OF-EACO registers RO of 2%–3% lower than VMR-ITS and 3%–6% lower than IDBACOR. For the speed scale of 30–50 km/h, OF-EACO registers RO of 2%–4% lower than VMR-ITS and 5%–9% lower than IDBACOR. Similarly, OF-EACO registers RO of 3% to 7% lower than VMR-ITS and 5% to 12% lower than IDBACOR at speeds from 10 to 50 km/h. Figure 30 depicts the RO achieved by all works for a 10–50 km/h speed scale. Figure 31 depicts the RO achieved by all works for a 30–50 km/h speed scale. Figure 32 depicts the RO achieved by all works for a 50–100 km/h speed scale.
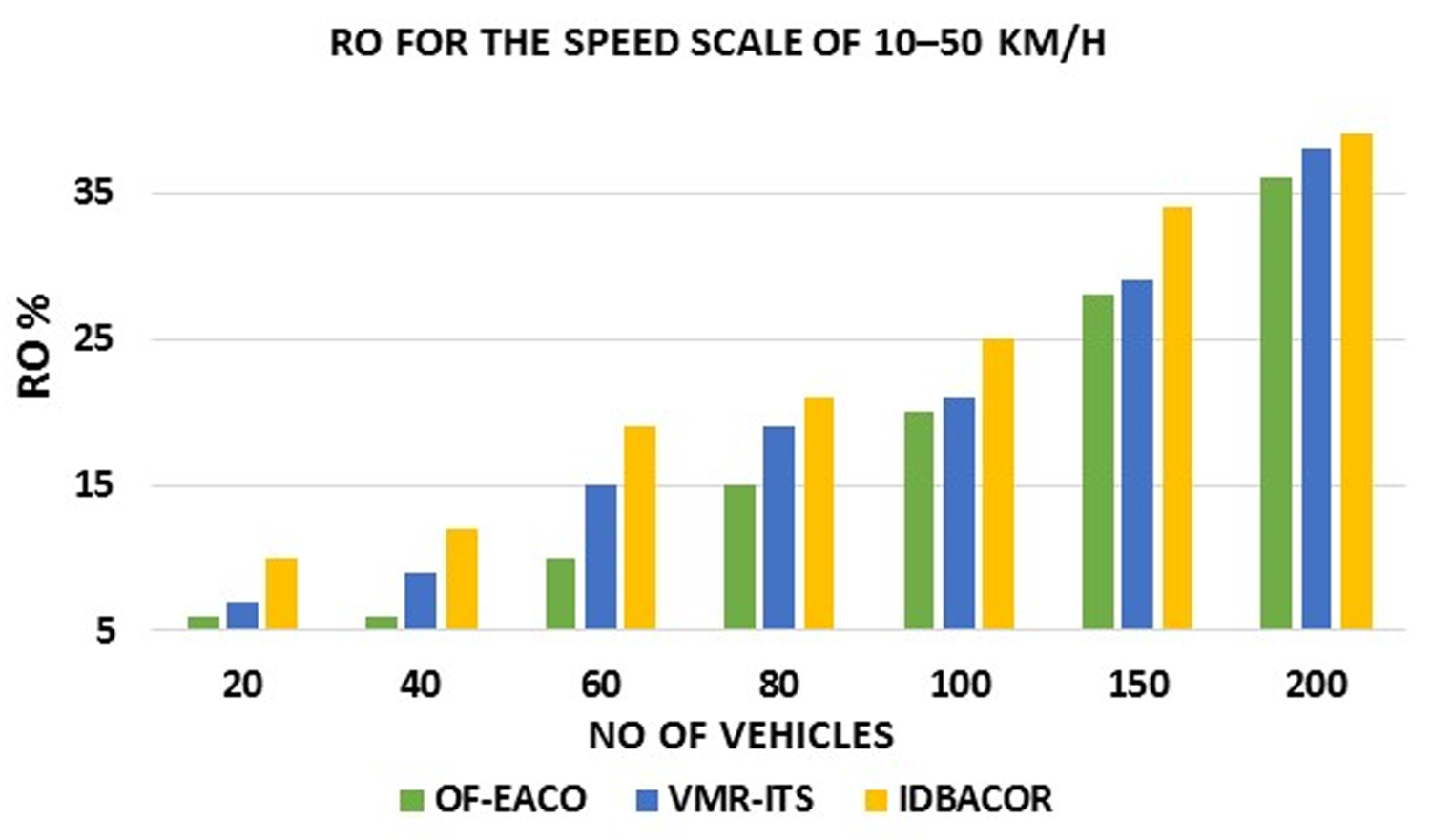
RO for 10–50 km/h speed scale.
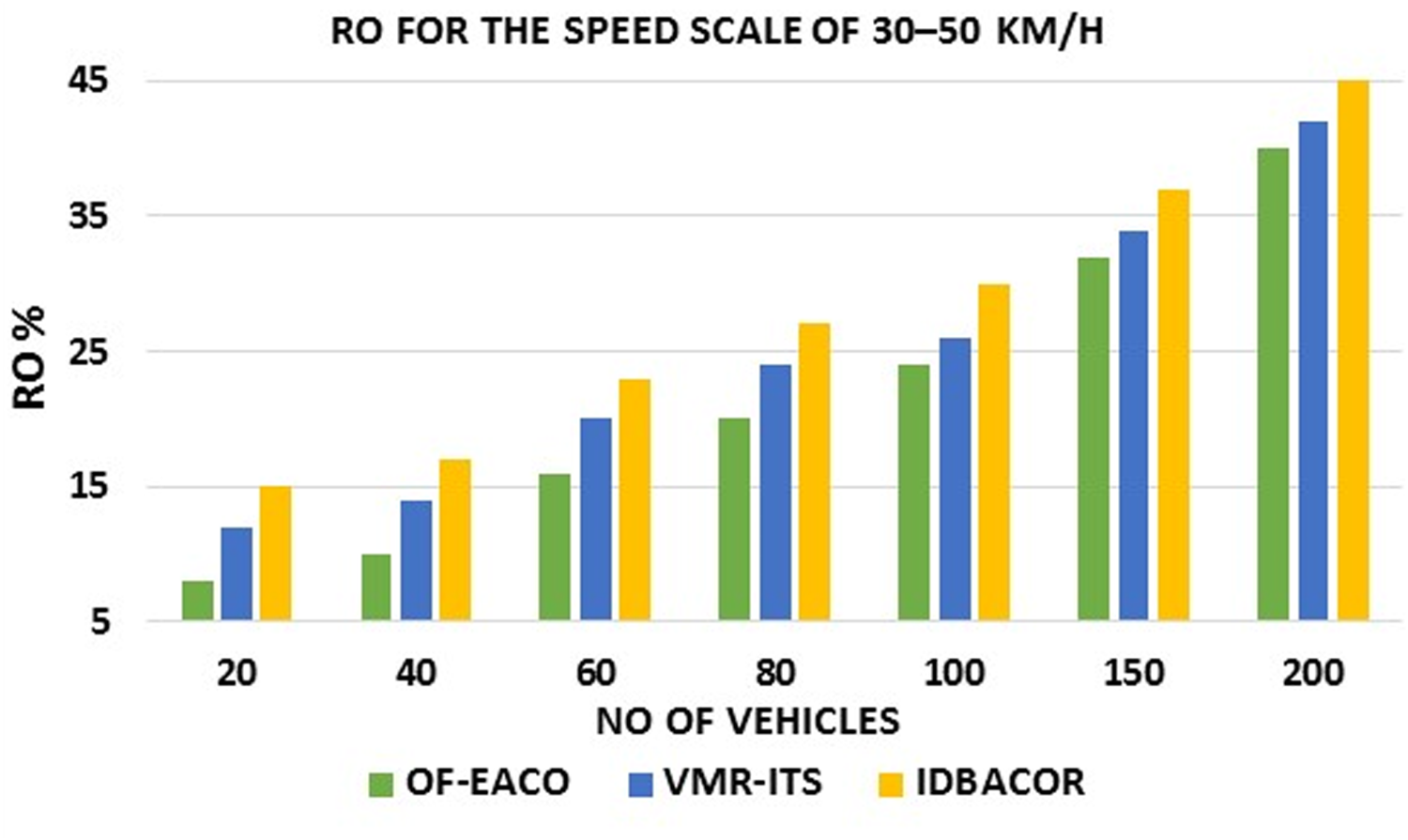
RO for 30–50 km/h speed scale.
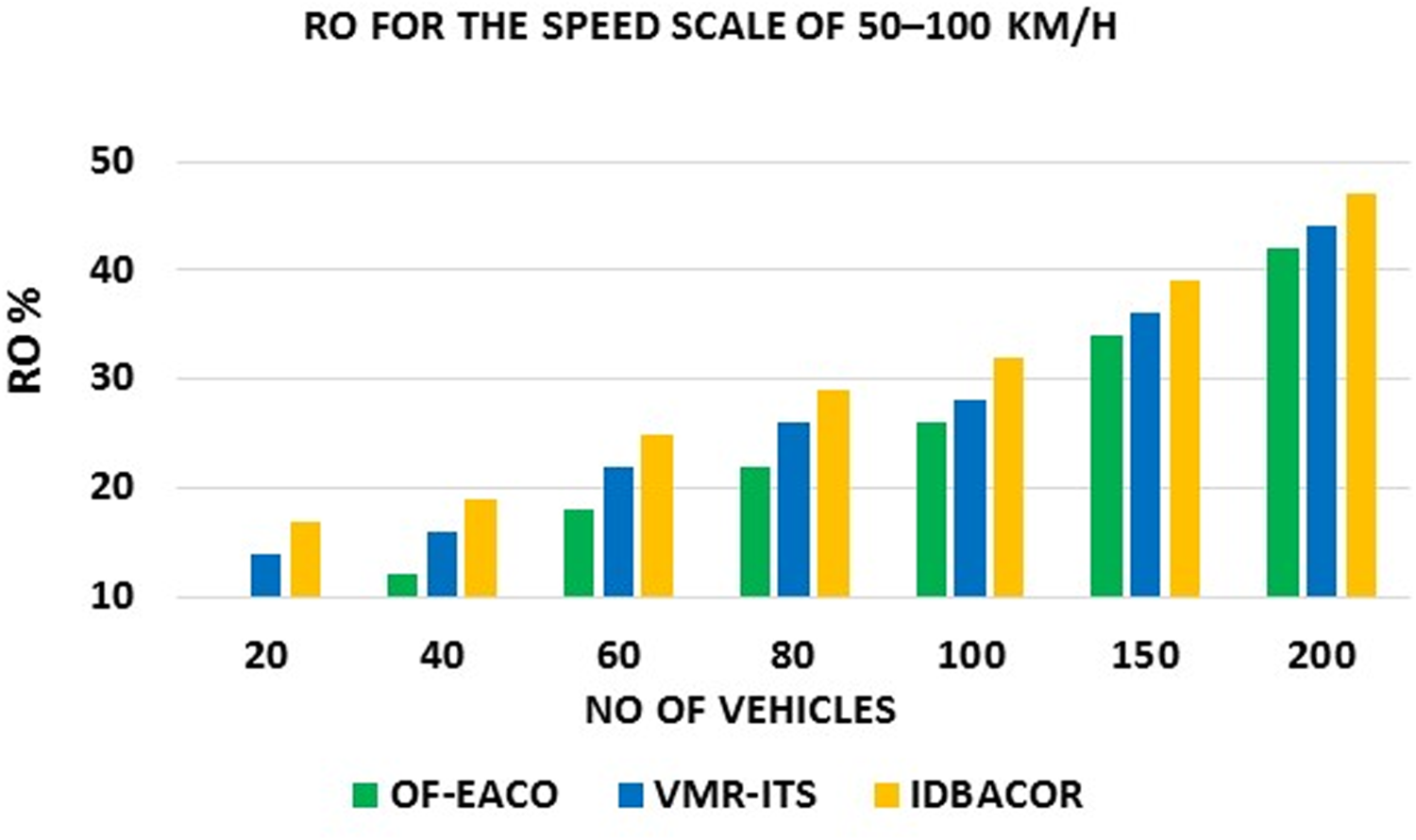
RO for 50–100 km/h speed scale.
In IH-VANETs, Computational overhead 
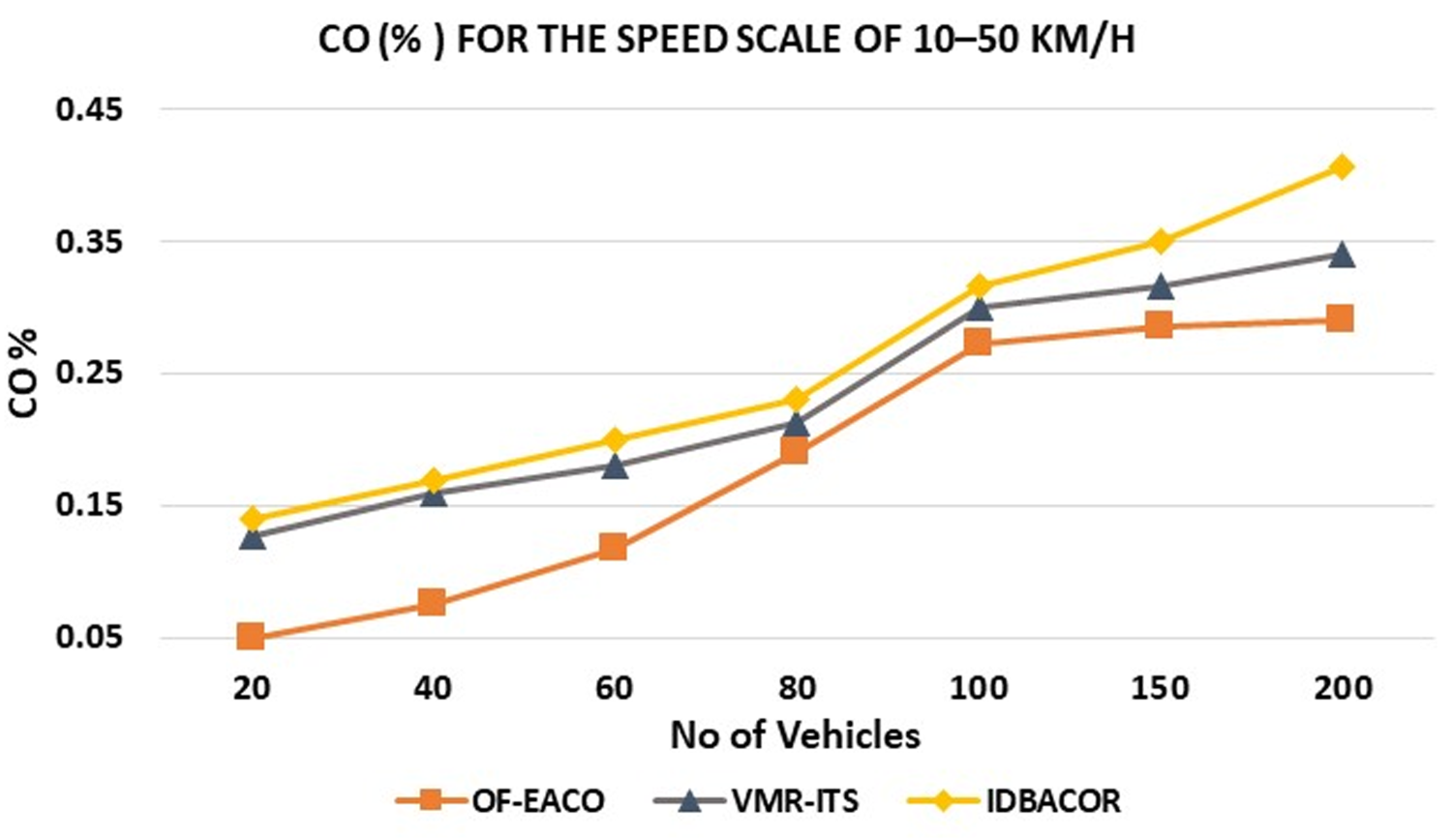
CO for 10–50 km/h speed scale.
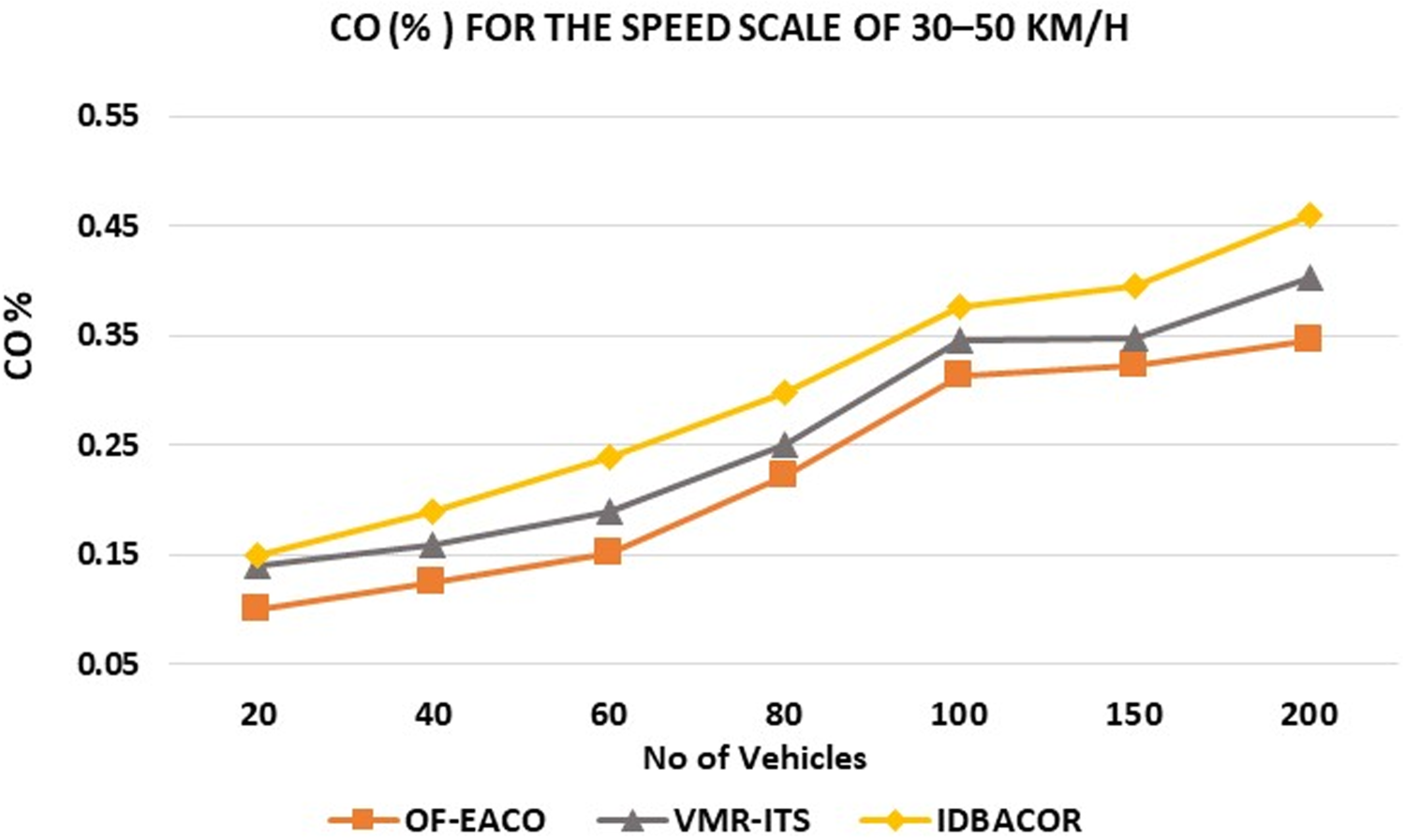
CO for 30–50 km/h speed scale.
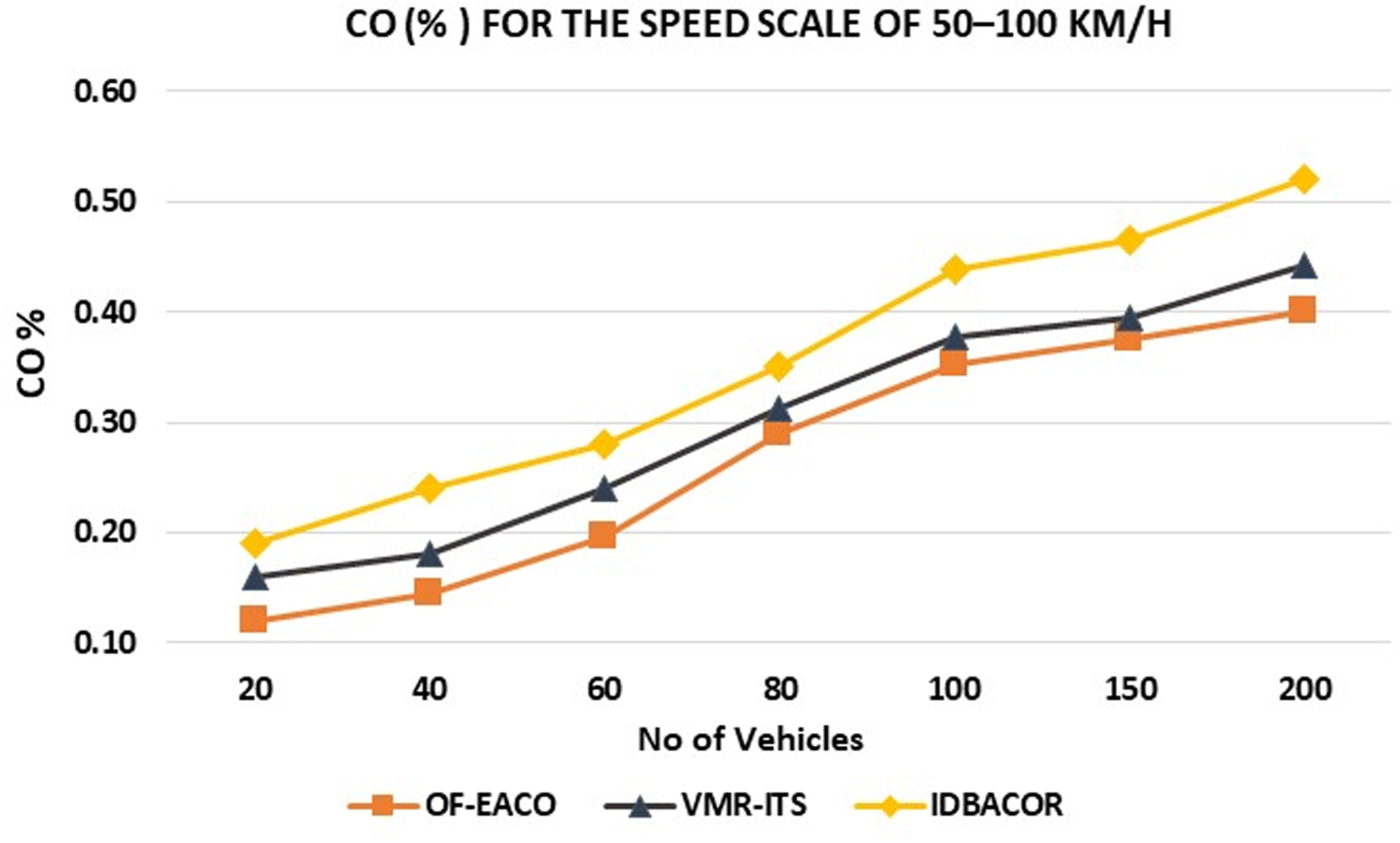
CO for 50–100 km/h speed scale.
Table 8 presents CC. The proposed OF-EACO records a CC of
ActualWall Time Analysis (A-WTA) (Seconds)
In CA-WT, wall time (WT) refers to the actual elapsed execution time engaged by OF-EACO from start to finish. The start-to-finish time includes all the necessary computation and memory operations intended to complete the road selection. Mathematically, WT can be represented as

In the implementation, the start and end times of OF-EACO, VMR-ITS, and IDBACOR are logged using a clock, and the execution is repeated for each scenario. The scenarios are scaled with vehicle variations including 20, 40, 60, 80,100,150, and 200. Each scenario is implemented for speed scales of 10–50 km/h, 30–50 km/h, and 50–100 km/h. The measured values also indicate that the proposed OF-EACO is efficient in terms of taking less WT compared to the existing VMR-ITS and IDBACOR. This superiority is achieved due to the optimal convergence speed of OF-EACO. Furthermore, OF-EACO operates with less computational overhead than VMR-ITS and IDBACOR, which also helps it consume less WT. Figures 36, 37, and 38 clearly show that the CA-WT of the proposed OF-EACO is very low compared to VMR-ITS and IDBACOR for the speed scales of 10–50 km/h, 30–50 km/h, and 50–100 km/h. For the speed scale of 10 to 50 km/h, OF-EACO registers CA-WT of 7% to 10% lower than VMR-ITS and 9% to 12% lower than IDBACOR. For the speed scale of 30–50 km/h, OF-EACO registers CA-WT of 6%–10% lower than VMR-ITS and 8%–11% lower than IDBACOR. Similarly, OF-EACO registers CA-WT 5%–9% lower than VMR-ITS and 7%–10% lower than IDBACOR at speeds from 50 to 100 km/h.
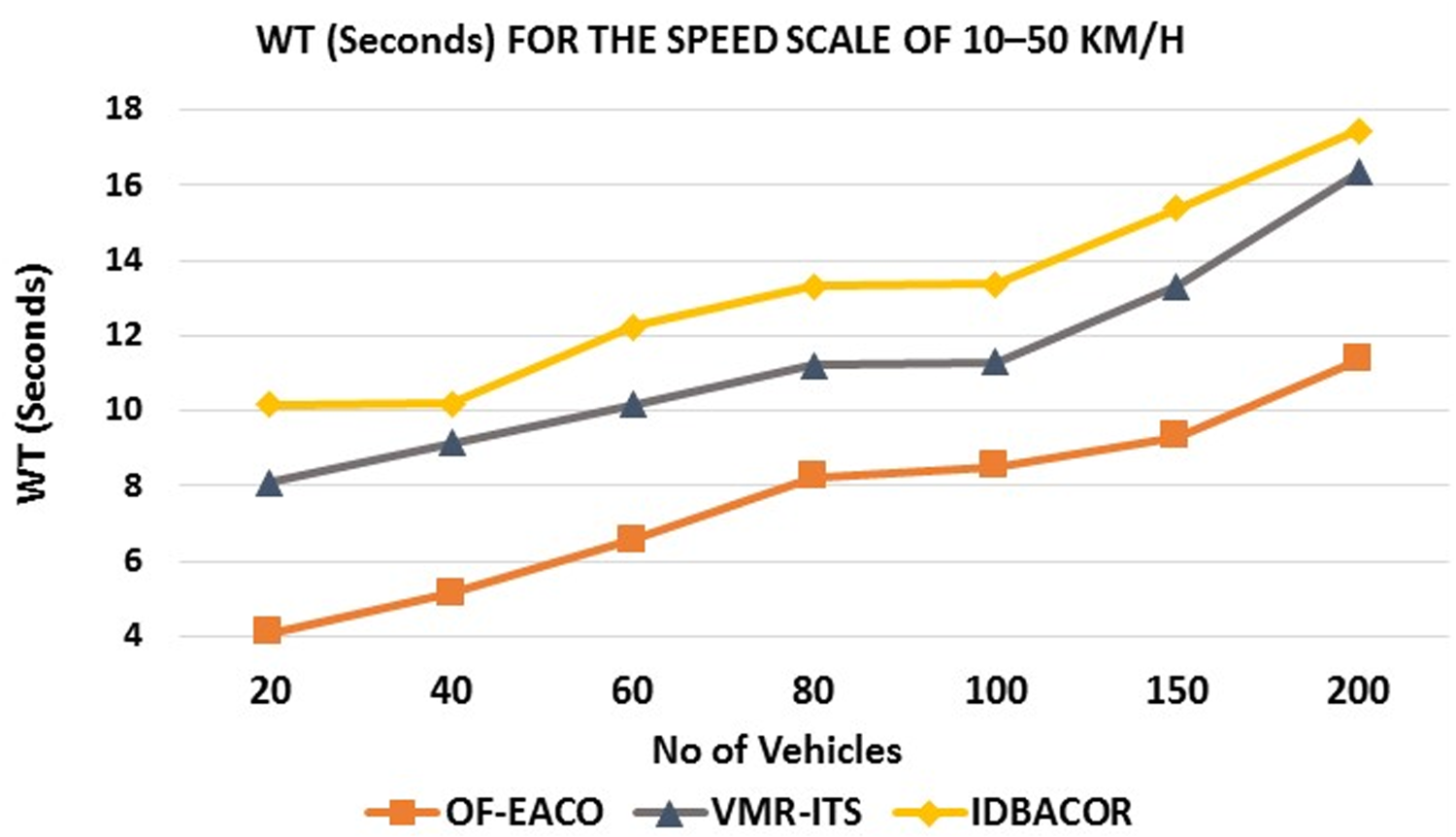
WT for 10–50 km/h speed scale.
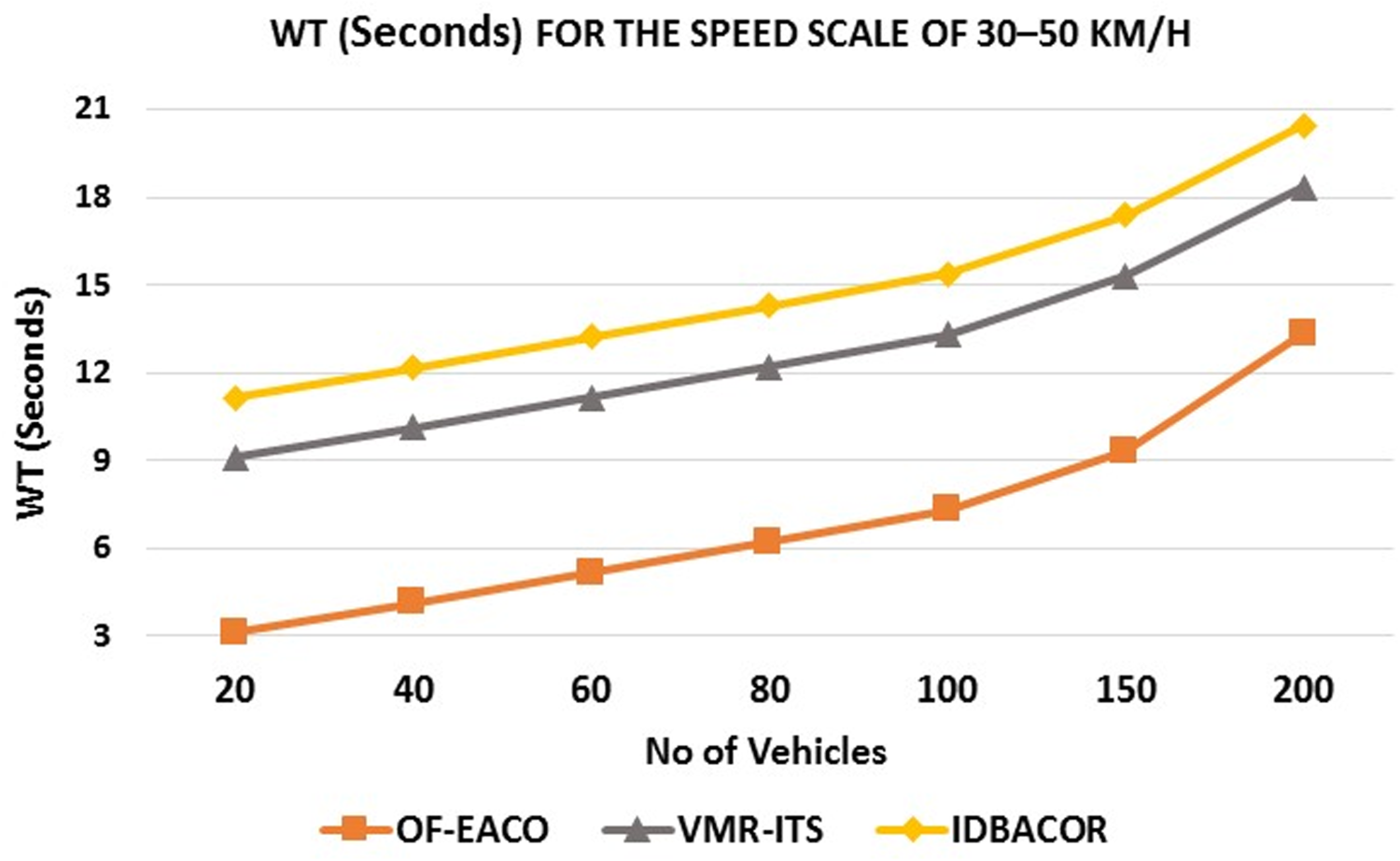
WT for 30–50 km/h speed scale.
WT for 50–100 km/h speed scale.
In addition to the asymptotic complexity as CC, it is essential to estimate the actual WT of the proposed OF-EACO, as it directly reflects the actual implementation cost under real-world scenarios. As shown in graphs (36, 37, and 38), the gradual increase in WT demonstrates the scalability of OF-EACO in the real-time frontier. The WT analysis confirms the real-world feasibility of OF-EACO in realistic IH-VANETs. Furthermore, the discussion on CC suggests that the OF-EACO grows exponentially as the number of vehicles grows. The measured WT suggests that the OF-EACO is practical for urban-scale networks. Although the implementations are with 20–200 vehicles per road, this range effectively captures dissimilar traffic densities from low to moderately solid urban circumstances. Our measured WT is less than 12, 14, and 16 s, even for 200 vehicles, for seed scales of 10–50 km/h, 30–50 km/h, and 50–100 km/h. This observation is very close to linear empirical scaling. Real-world deployments may have more than 200 vehicles, but the results suggest that OF-EACO scales linearly with the empirical scaling. This near-linear empirical scaling recommends that OF-EACO can be extrapolated to larger networks beyond 200 vehicles, preserving realistic finishing times appropriate for real-time routing in real-world IH-VANET environments.


To output the optimal road, VMR-ITS must complete a cycle of forward and backward communication. This requirement delays the process of finding the optimal road, and the routing approach consumes a significant amount of energy compared to the proposed OF-EACO. Furthermore, IDBACOR relies heavily on INFO beacons to produce an optimal solution. The use of more INFO beacons for managing the network, route finding, and route maintenance results in higher energy consumption than the proposed OF-EACO. The proposed OF-EACO requires a minimum number of iterations to reach the optimal solution compared to VMR-ITS, which saves the vehicle's energy. Also, the lower use of beacons in the proposed OF-EACO compared to IDBACOR can avoid high energy consumption. Figures 39, 40, and 41 clearly show that the EC of the proposed OF-EACO is much lower compared to VMR-ITS and IDBACOR for the speed scales of 10–50 km/h, 30–50 km/h, and 50–100 km/h. For the speed scale of 10 to 50 km/h, OF-EACO records 3% to 5% lower
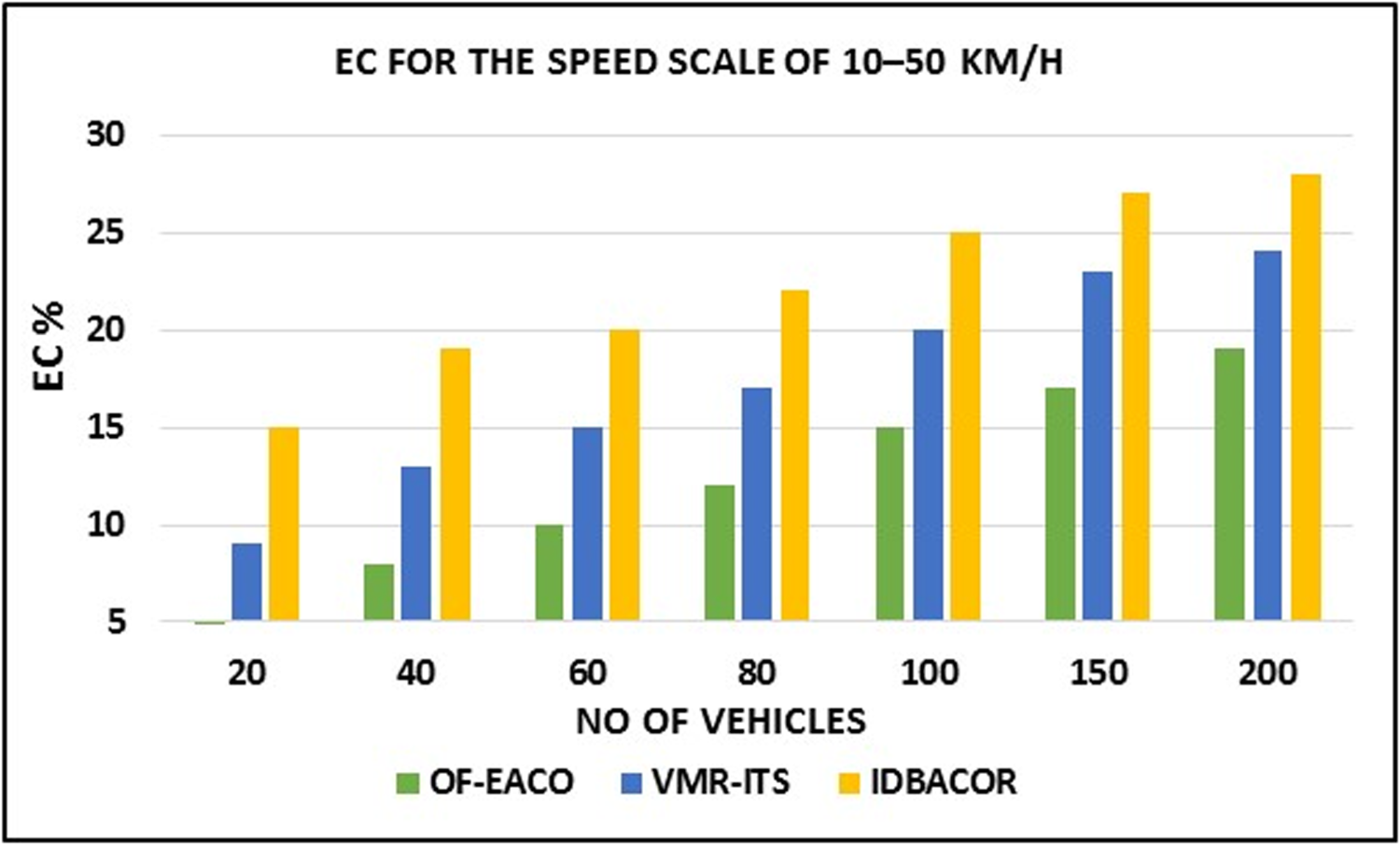
EC for 10–50 km/h speed scale.
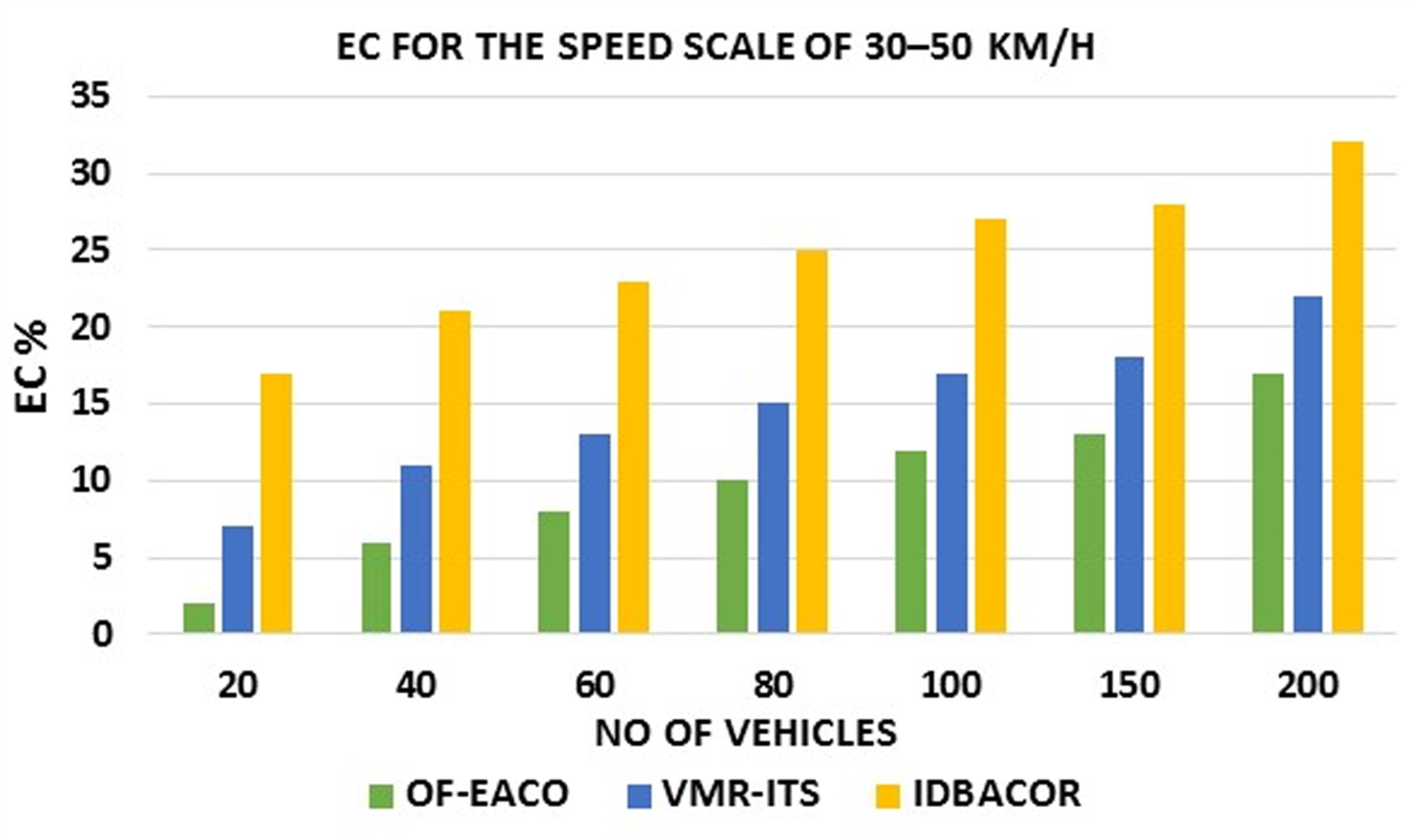
EC for 30–50 km/h speed scale.
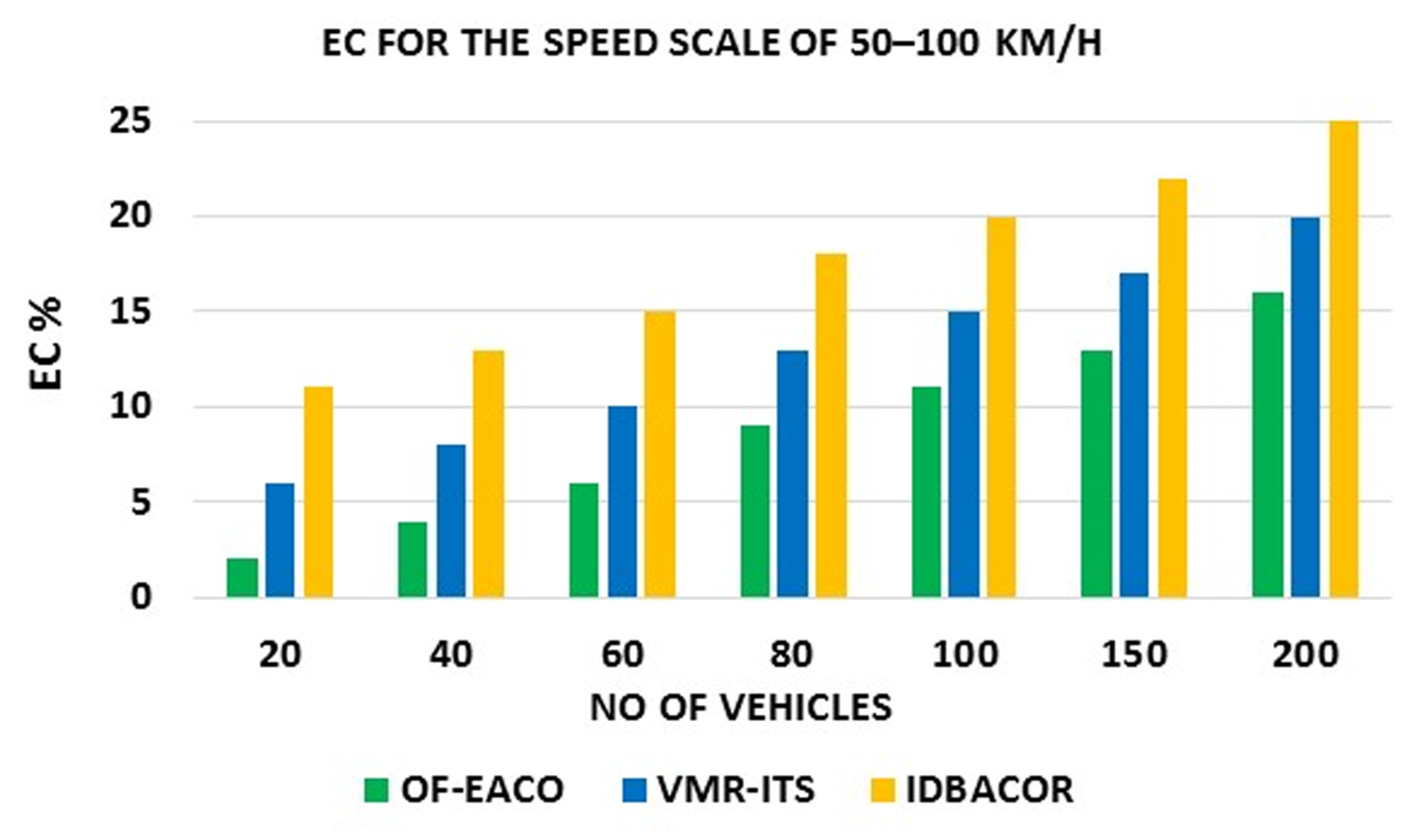
EC for 50–100 km/h speed scale.
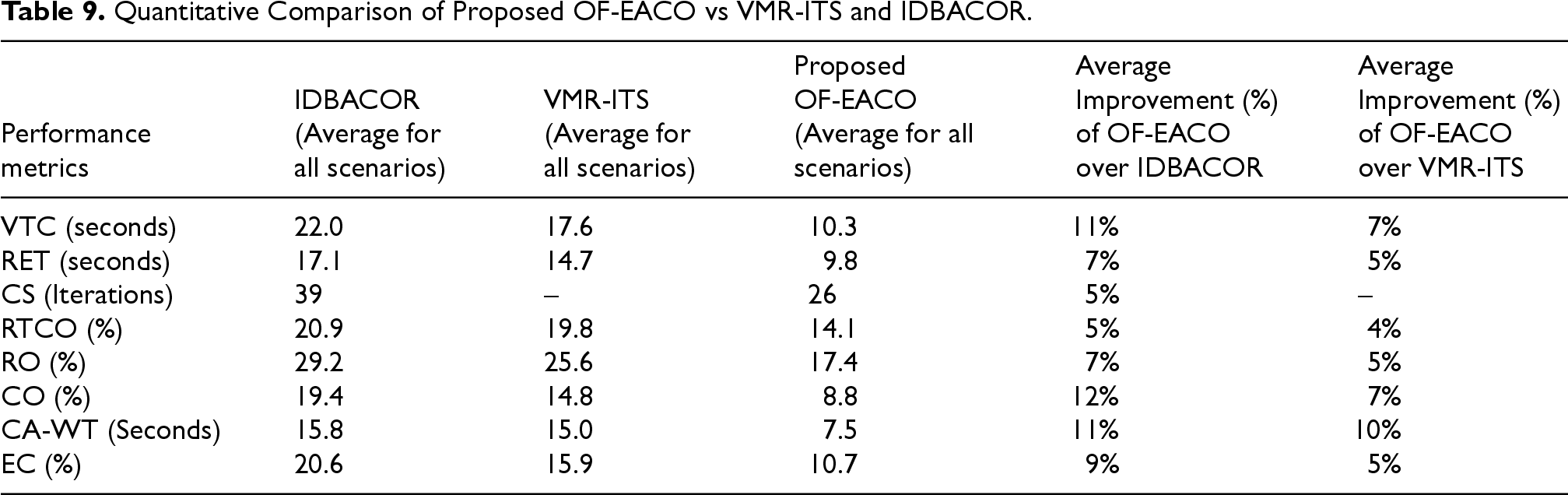
The proposed OF-EACO and existing approaches are tested for all performance metrics at speed scales of 10 to 50 km/h, 30 to 50 km/h, and 50 to 100 km/h. Adopting optimal roads with low density and fast optimal road selection improves the VTC and RET of OF-EACO over VMR-ITS and IDBACOR. Using fewer iterations to reach optimal solutions makes OF-EACO better than existing approaches in terms of CS. OF-EACO's reliance on optimal short roads with low vehicle density and signal produces lower RTCO for all conditions. The use of very few beacons and iterations improves the RO of the proposed OF-EACO compared to existing approaches. The minimal time spent on auxiliary tasks reduces the CO of OF-EACO compared to existing approaches. Compared to existing methods, OF-EACO has a lower A-WTA due to its faster convergence speed. The minimum number of iterations and reliance on beacons in OF-EACO saves energy for vehicles. Table 9 depicts the Quantitative comparison of the proposed OF-EACO over VMR-ITS and IDBACOR.
Computational Complexity Analysis.

Computational Complexity Analysis.
Quantitative Comparison of Proposed OF-EACO vs VMR-ITS and IDBACOR.
The performance assessment metrics VTC, RET, CS, RTCO, RO, CO, and EC determine the practical viability of OF-EACO. The assessment of the metrics for SUMO traffic scenarios also demonstrates the practical viability of the proposed OF-EACO. Similarly, CC and A-WTA demonstrate the computational viability of OF-EACO. The
OF-EACO offers an optimal, uncongested short road with low vehicle density and fewer traffic signals, resulting in shorter travel times for vehicles. The proposed OF-EACO demonstrates significant success in selecting optimal roads for IH-VANETs. Results indicate that the proposed OF-EACO outperforms IDBACOR and VMR-ITS in all aspects.
Since the proposed OF-EACO is optimal, it may encounter certain situations under different circumstances that could lead to a halt or impact the road selection process. These include poor pheromone trails and aggressive evaporation rates. Both factors can affect the road selection process and cause the search to turn into random exploration. For example, an extreme evaporation rate (
Conclusion
The proposed work of this article aims to identify the optimal road by considering road type, RL, RFS, and RSC. The optimal road is characterized as an efficient, uncongested short-distance route with low vehicle density and minimal signal count. In this article, an optimized fitness-based enhanced ACO is presented to help vehicles travel quickly on optimal short-length roads without delay and congestion for urban scenarios. To provide optimal roads, the proposed OF-EACO initially applies DMLS to register vehicles under RTS, and other modules such as RL, RFL, and RSC are implemented to find road length, road fitness level, and signal count. Next, EACO's ORSM dynamically executes a roulette wheel according to the higher RFS to find optimal roads among the available roads. In OF-EACO, only a high fitness score has short RL, optimal RFL, low RSC, and high pheromone values based on the dynamic evaporation rate. On optimal roads, the vehicle experiences less travel time, less traffic or congestion, and less delay.
In the proposed OF-EACO, the use of optimal roads without congestion and travel delay reduces the VTC for speed scales of 10–50 km/h, 30–50 km/h, and 50–100 km/h under different mobility conditions. For all three speed ranges, the proposed OF-EACO shows an average of 7% lower VTC than VMR-ITS and 11% lower than IDBACOR. Pre-implementing all modules and using a roulette wheel allows the ORSM in the proposed system to quickly select the best road, saving RET. For speeds of 10–50 km/h, 30–50 km/h, and 50–100 km/h with vehicle variations, OF-EACO reduces the average RET by 5% compared to VMR-ITS and 7% compared to IDBACOR. Modified pheromone rules decrease the number of iterations and enable OF-EACO to rapidly find optimal solutions despite different vehicle variations. Across these speed ranges, OF-EACO averages 26 iterations, whereas IDBACOR requires 39. OF-EACO's reliance on optimal, low-density roads with minimal signals results in lower RTCO for all speed scales. The proposed OF-EACO achieves an average RTCO that is 4% lower than VMR-ITS and 5% lower than IDBACOR. Its smaller number of iterations and fewer beacons reduce the RO significantly, recording a 5% decrease compared to VMR-ITS and 9% compared to IDBACOR across all speeds. Minimizing auxiliary tasks lowers the CO of OF-EACO; it exhibits an average CO that is 7% lower than VMR-ITS and 12% lower than IDBACOR for all speed ranges. With optimal convergence speed and low overhead, OF-EACO has a CC of
The limitations of the proposed OF-EACO include the reliance on GPS-based precise location information to make routing decisions. The localization dependency affects the efficiency of the proposed system. The future scope and improvements of the current study are twofold. First, updating the current OF-EACO with ad hoc localization methods for different traffic patterns with different practical scenarios for highway road networks. Furthermore, RTS in this work can introduce overhead for highway scenarios. To avoid this, we plan to integrate edge computing technology with machine learning techniques into RTS for the efficient processing of heuristic data near vehicles while satisfying quality of service (QoS) parameters such as privacy, integrity, and security. Second, the current OF-EACO is focused on the IEEE 802.11p standard for communication. Extending OF-EACO to IH-VANET communication technologies is interesting. Combining OF-EACO with Long-Term Evolution-based Vehicle-to-Everything (LTE-V2X) and 5G New Radio-based V2X (5G NR-V2X) offers high data rates, optimal connectivity, low latency, and minimal overhead. This integration facilitates effective operations in dense networks with varying QoS requirements.
Footnotes
Author Contributions
All authors contributed equally.
Ethical Standard
This work does not require ethics approval.
Consent to Participate
This work does not require consent to participate because it does not involve human subjects.
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of Conflicting Interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data Availability
Authors confirm that the data supporting the findings of this study are available within the article.