
Abstract
This study aims to elucidate the mechanisms through which service robot anthropomorphism and employee self-efficacy influence human–robot collaborative performance in the service industry. A conceptual model was developed in which perceived usefulness, perceived ease of use, perceived competence, and collaborative intention operate as multiple mediators, clarifying how robot-assisted collaboration enhances performance. Using structural equation modeling, we analyzed data from 418 valid questionnaires collected from employees in the hospitality and catering sectors. The results indicate that both service robot anthropomorphism and employee self-efficacy significantly enhance employees’ perceptions of usefulness, ease of use, and competence. These perceptions, in turn, positively affect collaborative intention, which subsequently improves collaborative performance. Moreover, perceived usefulness, ease of use, and competence jointly mediate the relationships between the antecedent variables (anthropomorphism and self-efficacy) and collaborative performance. In summary, the findings elucidate a sequential mediation pathway: robot anthropomorphism and employee self-efficacy boost key perceptions, thereby fostering collaborative intention and ultimately enhancing performance. The study provides theoretical insights into the psychological mechanisms through which anthropomorphic design features and employee self-efficacy shape effective human–robot collaboration and offers practical guidance for the successful integration of service robots into service operations.
Keywords
Introduction
Service robots are increasingly deployed in hospitality and catering, serving as both tools and collaborators.1,2 As human–robot collaboration emerges, 3 it is crucial to understand how employees’ psychological adaptation shapes collaborative performance. 2
Most prior research, grounded in the technology acceptance model (TAM),4,5 emphasizes adoption, showing that perceived usefulness and ease of use drive acceptance. 6 However, in hospitality and catering settings, employees actively collaborate with robots to deliver services. 7 Acceptance alone cannot fully explain collaborative outcomes.
Anthropomorphism may foster trust and engagement but also create unrealistic expectations.8,9 Its impact on employees’ perceptions, intentions, and coordination-intensive performance remains unclear.
Self-efficacy, central to social cognitive theory (SCT), 10 reflects employees’ confidence in managing new technologies. In dynamic, customer-facing environments, 11 efficacy beliefs directly shape how employees interpret robot cues, manage unexpected situations, and perform collaborative tasks.12,13 While widely studied in adoption research, its direct role in influencing perceptions, collaborative intention, and performance is underexplored.
To address these gaps, this study integrates the TAM, SCT, the stereotype content model, 12 and the technology–performance chain (TPC) 14 to examine how anthropomorphism and self-efficacy jointly shape employees’ perceptions, collaborative intention, and performance.
Literature Review
Anthropomorphism and employees’ perceptions of service robots
Anthropomorphism attributes human traits to nonhuman entities.
14
The three-factor theory suggests that such cues activate human-related schemas, shaping employees’ perceptions.15,16 Under certain conditions, excessive anthropomorphism may foster unrealistic expectations, disappointment, or reduced authentic interaction.17–19 In hospitality and catering, where service is interpersonal and customer expectations central,
20
anthropomorphic features can make robots appear more useful,
21
easier to interact with,
22
and more competent,23,24 thereby facilitating collaboration.
25
Accordingly: Anthropomorphism positively influences perceived usefulness, ease of use, and competence.
Self-efficacy and employees’ perceptions of service robots
Self-efficacy from SCT reflects employees’ confidence in managing collaborative tasks with robots.
10
Although prior research cautions that overconfidence may lead employees to underestimate task complexity or robot limitations,26,27 in hospitality and catering, where adaptation and teamwork are critical, efficacy beliefs shape how employees interpret robot tasks. High self-efficacy improves perceptions of usefulness, ease of use, and competence, motivating learning and integration.28,29 Accordingly: Self-efficacy positively influences perceived usefulness, ease of use, and competence.
Employees’ perceptions of service robots and collaborative intention
The TAM highlights usefulness and ease of use as adoption drivers.
5
Prior research also cautions that highly competent robots may, under certain conditions, trigger replacement concerns and undermine employee acceptance.
30
In hospitality and catering, employees must collaborate with robots, not merely adopt them. Collaborative intention reflects motivation to jointly perform tasks and coordinate actions.31,32 Perceived usefulness signals performance gains,
33
ease of use lowers collaboration barriers,33,34 and competence builds confidence in robots as reliable teammates.24,35 Thus: Perceived usefulness, ease of use, and competence positively influence collaborative intention.
Collaborative intention and collaborative performance
The TPC suggests that acceptance enhances performance.36,37 In hospitality and catering, where employees and robots must closely coordinate to deliver services, collaborative intention reflects employees’ proactive motivation to engage with robots as teammates. Stronger intention fosters involvement, coordination, and adaptation,
38
improving collaborative performance—defined as the effectiveness, quality, and efficiency of jointly executed service activities.39,40 Thus: Collaborative intention positively influences collaborative performance.
The research model is shown in Figure 1.
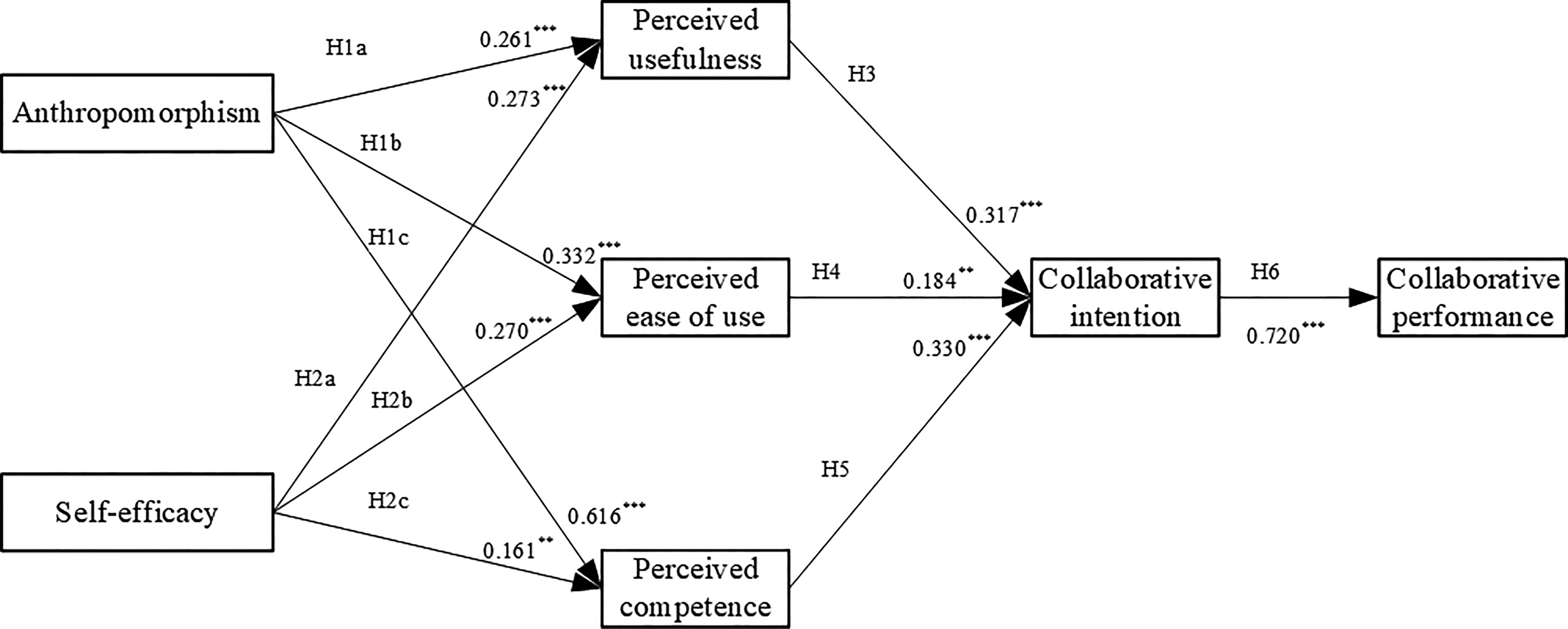
The proposed theoretical model. The model positions anthropomorphism and self-efficacy as antecedents and identifies perceived usefulness, ease of use, competence, and collaborative intention as multiple mediators in the pathway to collaborative performance.
Methods
Participants
We surveyed employees from the budget hospitality and the catering industries, including managers, foremen, supervisors, and receptionists. The study was approved by the Ethics Committee of the Institute of Neuroscience and Cognitive Psychology at Anhui Polytechnic University, and all participants provided informed consent. The data were collected over 3 months via Wenjuanxing (https://www.wjx.cn/) through both on-site and online questionnaires. Of 430 responses, 418 were valid after excluding incomplete or patterned responses. Participants reported a moderate-to-high familiarity with service robots (M = 4.91, SD = 1.49). Table 1 summarizes demographic characteristics, including gender, job roles, and prior robot experience.
Participant Demographics
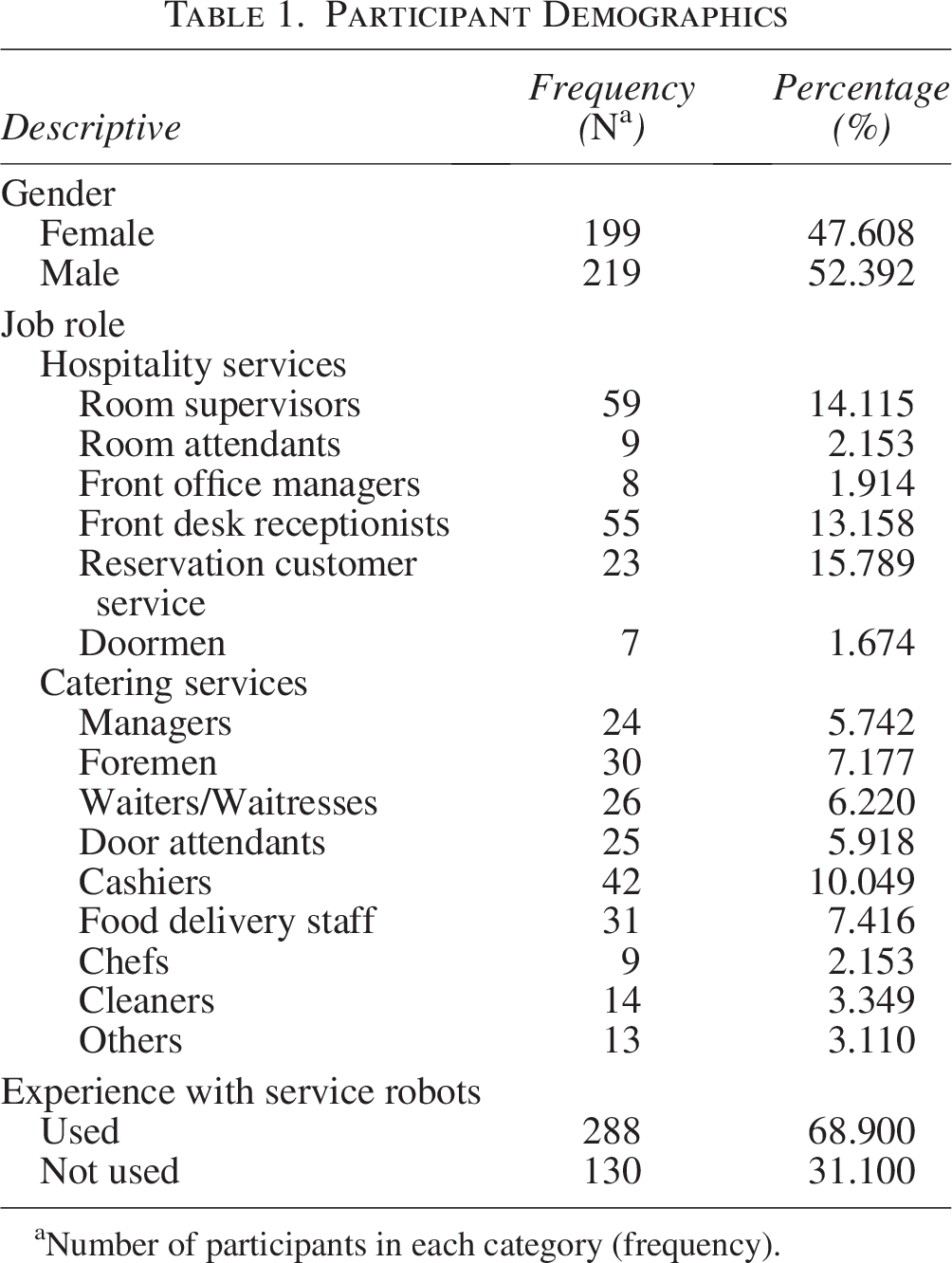
Number of participants in each category (frequency).
Measures
We measured seven constructs using validated scales adapted for the hospitality and catering context (Table 2). Self-efficacy was assessed with the 10-item General Self-Efficacy scale. 42 Robot anthropomorphism was measured using the Kim and McGill scale. 41 Perceived usefulness and perceived ease of use were adapted from Heerink et al. 43 Perceived competence was assessed via McClelland’s Competency scale. 44 Collaborative intention was adapted from Agarwal and Karahanna, 45 and collaborative performance from Gonzalez-Mulé et al. 46 All items were rated on a 7-point Likert scale (1 = “strongly disagree” and 7 = “strongly agree”).
Measurement Items, Sources, and Convergent Validity Statistics
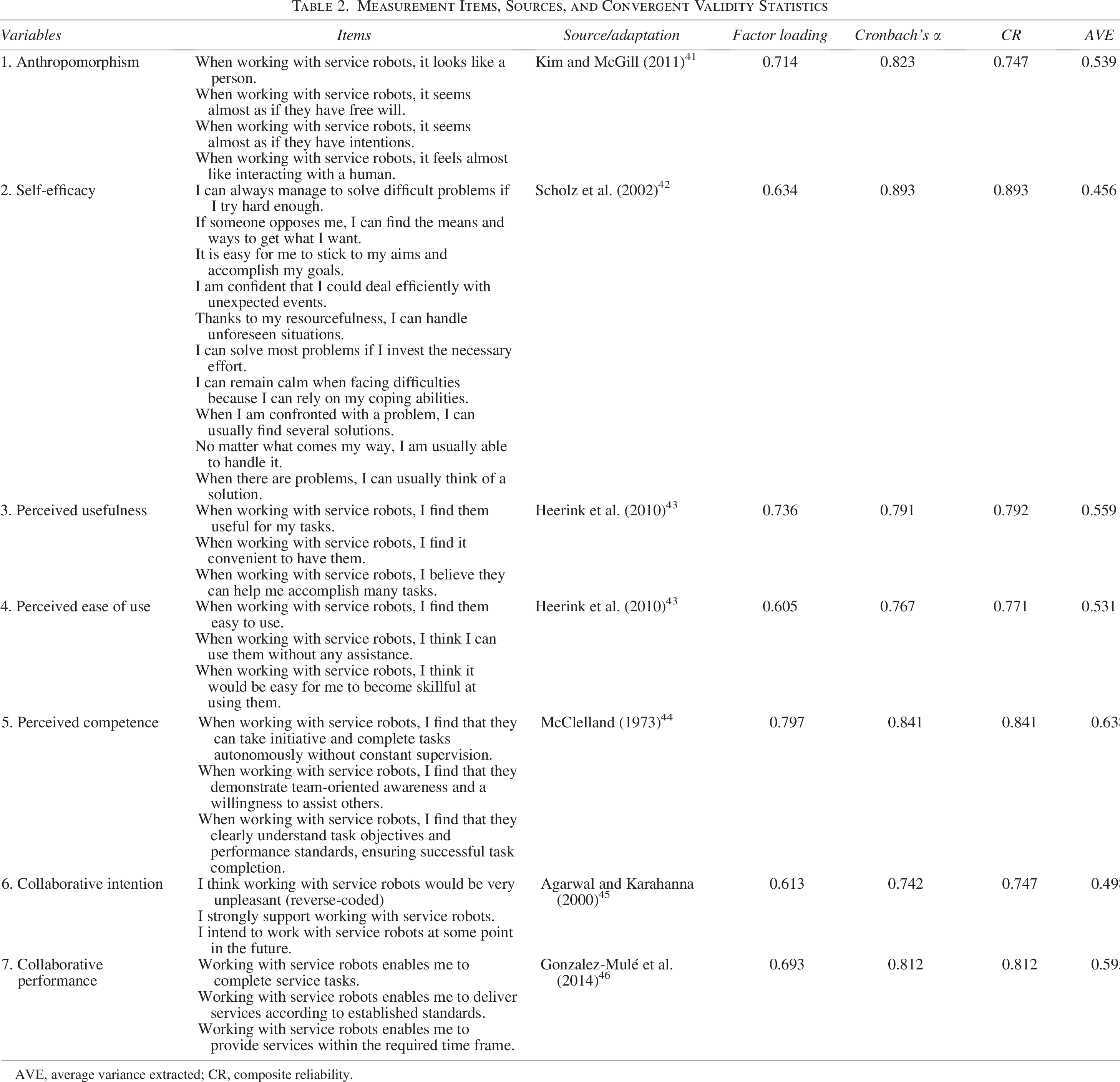
AVE, average variance extracted; CR, composite reliability.
Statistical analysis
Analyses were conducted using SPSS 26.0 and AMOS 26.0. SPSS was used for reliability and descriptive statistics, while AMOS was used for confirmatory factor analysis and structural equation modeling. Convergent and discriminant validity were assessed using factor loadings, composite reliability (CR), average variance extracted (AVE), and Heterotrait-Monotrait Ratio (HTMT) ratios. Measurement invariance tests were also performed to ensure model stability across subgroups.
Common method bias was assessed using Harman’s single-factor test and the common latent factor (CLF) approach. Bootstrapping was employed to test multiple-chain mediation effects.
Results
Reliability and validity test
Cronbach’s alpha values ranged from 0.742 to 0.893, indicating satisfactory internal consistency. Confirmatory factor analysis (CFA) results showed that all factor loadings exceeded 0.60 and all CR values were above 0.70. AVE values exceeded the 0.50 threshold for most constructs, while self-efficacy showed an AVE of 0.456, which is considered acceptable given its broad, trait-like nature, supporting convergent validity (Table 2).47,48 Discriminant validity was confirmed as the square roots of AVEs exceeded interconstruct correlations and all HTMT ratios were below 0.85 (Table 3).49,50 Measurement invariance was supported (ΔCFI < 0.01), indicating stability across groups and reinforcing the robustness of the findings. 51
Correlation, Square Root of Average Variance Extracted, and HTMT Ratios
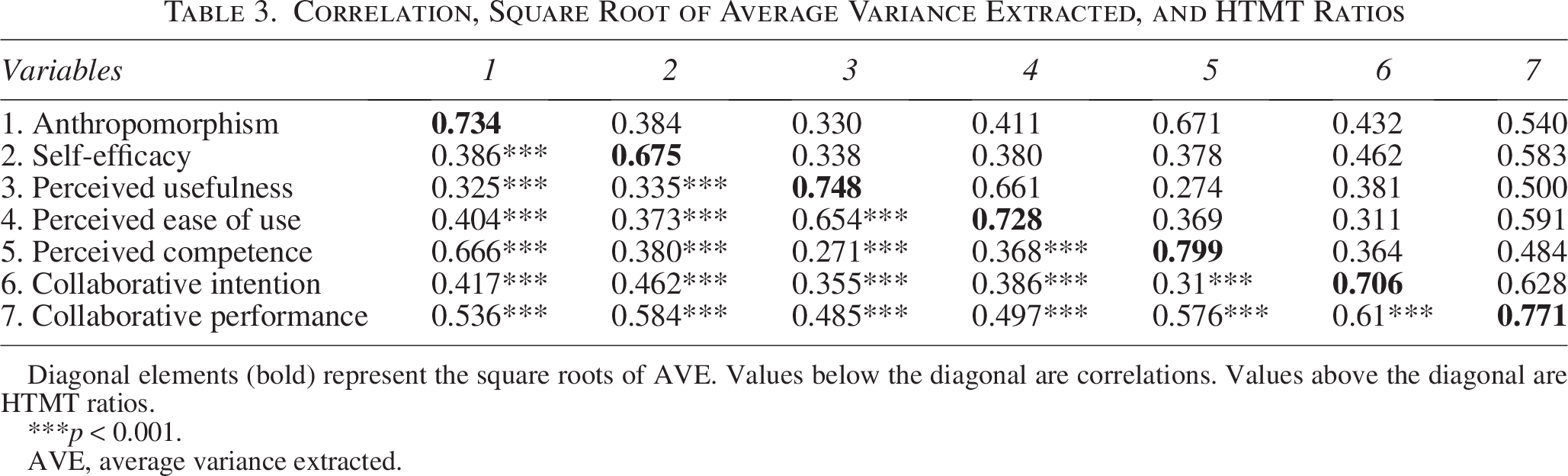
Diagonal elements (bold) represent the square roots of AVE. Values below the diagonal are correlations. Values above the diagonal are HTMT ratios.
***p < 0.001.
AVE, average variance extracted.
Common method bias test
Harman’s single-factor test showed the first factor accounted for 30.179 percent of variance, below the 40 percent threshold, indicating limited common method bias. 52 A CLF test further confirmed this: adding a method factor minimally affected model fit (ΔCFI < 0.01, ΔRMSEA < 0.01) and structural paths (changes < 0.20), suggesting common method bias does not threaten validity. 53
Hypotheses testing
The structural model fit well: χ2/df = 1.788 (<3), root-mean-squared error of approximation (RMSEA) = 0.043 (<0.05), comparative fit index (CFI) = 0.941 (>0.90), and Tucker–Lewis index (TLI) = 0.935 (>0.90). Path coefficients are presented in Figure 1. Competing models did not improve fit, and multigroup analysis (e.g., by gender) revealed no significant differences, confirming the robustness and stability of the hypothesized relationships.
Path analysis
Table 4 presents standardized path coefficients and R2 values. Both anthropomorphism and self-efficacy significantly enhanced employees’ perceptions of usefulness (β = 0.261 vs. 0.273), ease of use (β = 0.332 vs. 0.270), and competence (β = 0.616 vs. 0.161), all p < 0.01, supporting H1a–c and H2a–c. Anthropomorphism had a notably stronger effect on perceived competence. Perceived usefulness (β = 0.317), ease of use (β = 0.184), and competence (β = 0.330) positively predicted collaborative intention, all p < 0.01, supporting H3–H5, with competence exerting the strongest effect. Finally, collaborative intention positively influenced collaborative performance (β = 0.720, p < 0.001), supporting H6. Overall, the R2 values indicate satisfactory explanatory power for all endogenous constructs. 54
Results of Path Analysis
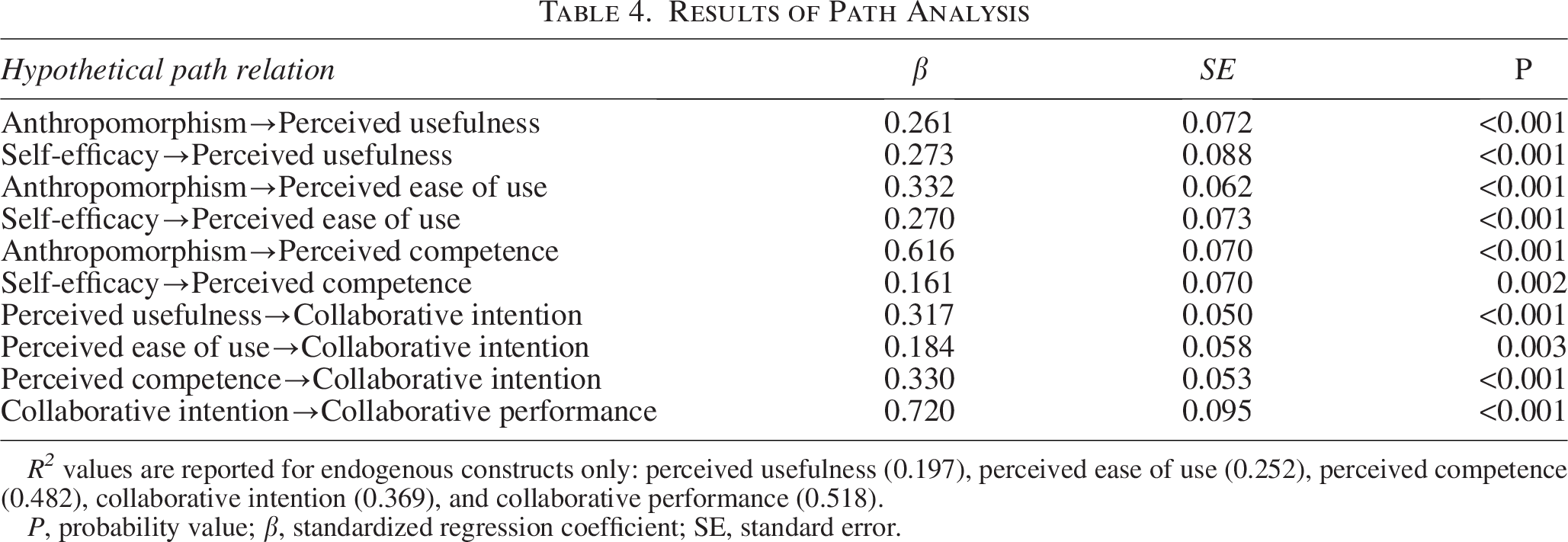
R2 values are reported for endogenous constructs only: perceived usefulness (0.197), perceived ease of use (0.252), perceived competence (0.482), collaborative intention (0.369), and collaborative performance (0.518).
P, probability value; β, standardized regression coefficient; SE, standard error.
Multiple-chain mediating effect
Bootstrap results (Table 5) show that the 95 percent confidence intervals for the paths Anthropomorphism→Perceived usefulness/ease of use/competence→Collaborative intention→Collaborative performance and self-efficacy→Perceived usefulness/ease of use/competence→Collaborative intention→Collaborative performance exclude 0 (all p < 0.05), confirming the multiple-chain mediating effects.
Results of Multiple Mediating Effects
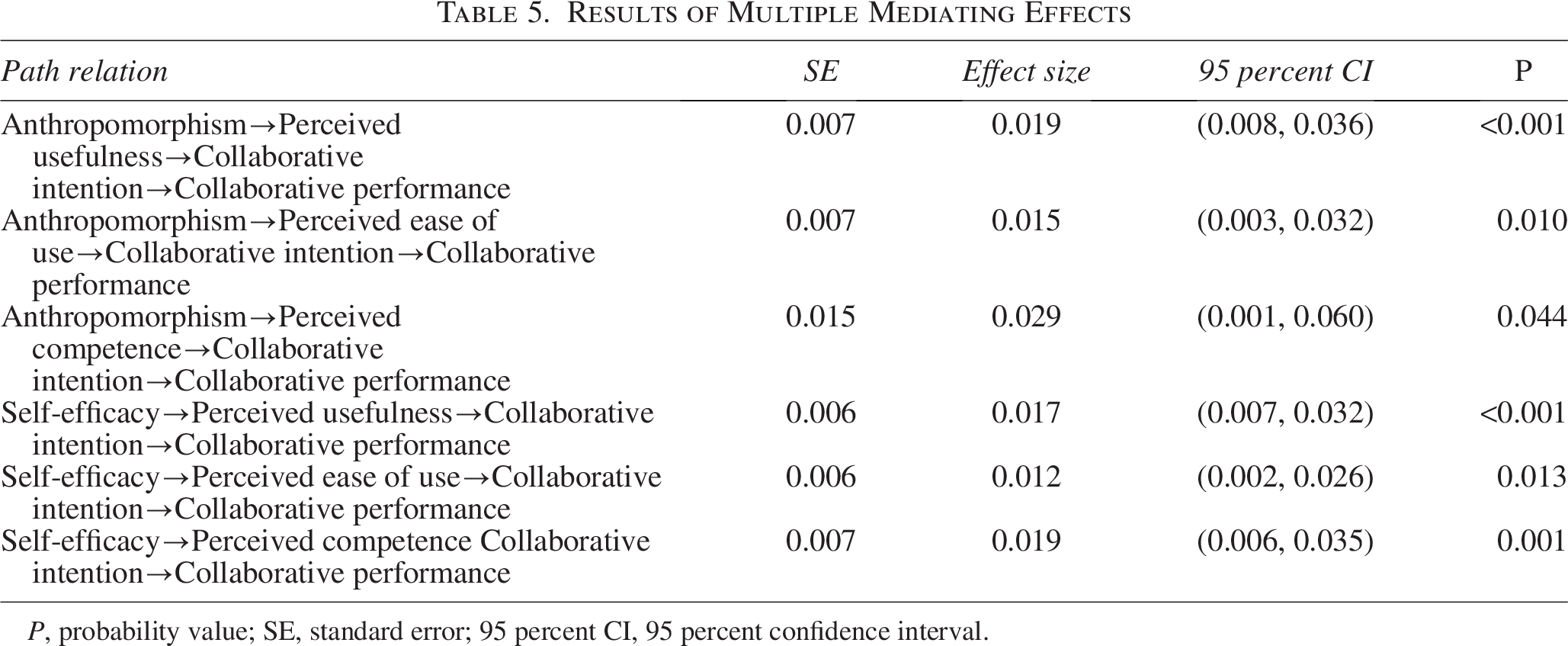
P, probability value; SE, standard error; 95 percent CI, 95 percent confidence interval.
Discussion
Theoretical contributions
This study advances understanding of human– robot collaboration in hospitality and catering. First, it clarifies how anthropomorphism and self-efficacy shape collaborative performance. Both factors enhance employees’ perceptions of usefulness, ease of use, and competence, which foster collaborative intention and, in turn, improve performance. In service triads involving employees, robots, and guests, strong collaborative intention helps employees compensate for robots’ limitations (e.g., inflexibility), enabling smoother service delivery. 55 In China’s collectivist and pragmatic culture, guided by harmony and guanxi-driven reciprocity, collaborative intention may carry a moral dimension: it reflects a sense of obligation to contribute to in-group goals rather than a purely individual preference. 56 This moral framing may help transform intention into active coordination and mutual adjustment, thereby potentially strengthening the intention–performance link.57,58
Second, the study extends TAM by moving beyond technology adoption to employee–robot collaboration in joint task execution and by incorporating perceived competence as a core belief along with usefulness and ease of use. Our findings demonstrate that in hospitality and catering contexts, employees’ collaborative intention depends not only on functional evaluations but also on assessments of robots’ task competence. Notably, perceived competence emerges as the strongest predictor of collaborative intention, exceeding both usefulness and ease of use. In dynamic, multitasking hospitality settings, competent robots enhance confidence in joint execution. 59 Collectivist norms may further magnify this effect, as perceived competence can serve as a relational signal of the robot’s reliability as an in-group member. Thus, competence transforms TAM from an adoption-oriented framework into a collaboration-oriented one, where robots are evaluated not merely as tools but as capable team actors that sustain collective efficacy and reciprocity. 60
Last, this study clarifies the distinct yet complementary roles of anthropomorphism and self-efficacy. Anthropomorphic cues enhance perceptions of usefulness, ease of use, and particularly competence by making robots appear capable and socially compatible. 60 Self-efficacy also contributes to these perceptions and directly promotes collaboration by enabling employees to interpret anthropomorphic cues effectively and adapt to robotic partners.61,62 However, self-efficacy has a weaker impact on perceived competence compared to anthropomorphism, reflecting that employees’ confidence in their own abilities does not directly translate into higher assessments of robot ability. In the collectivist and pragmatic culture, competence may be judged instrumentally by observable contributions to shared tasks. Thus, external design cues (anthropomorphism) that signal capability are weighted more heavily than internal employee beliefs (self-efficacy) in forming competence perceptions, explaining this asymmetry. Positioned as an antecedent rather than a moderator, 23 self-efficacy thus plays a foundational role in culturally influenced human–robot teamwork. 29
Practical implications
This study offers several actionable insights. First, robot design should incorporate anthropomorphic features that enhance perceived usefulness, ease of use, and competence, while avoiding cues that create unrealistic expectations. Second, organizations should strengthen employee self-efficacy by providing task-specific robot usage training and hands-on practice with intuitive interfaces, enabling employees to collaborate confidently and effectively. 29 Third, clear task-delegation guidelines are needed to balance reliance on robots with timely human intervention. Last, managers should anticipate ethical and psychological risks, such as frustration when anthropomorphic cues fail to match actual robot capabilities, and align robot capabilities with employee expectations.
Limitations and future research
Several limitations remain. First, focusing on hospitality and catering constrains external validity; replications in other industries are necessary to assess the broader applicability of the findings. Second, the cross-sectional, self-report design limits causal inference; longitudinal or experimental studies could better capture the evolving and interactional nature of human–robot collaboration. Third, linear modeling cannot detect potential nonlinear or threshold effects (e.g., excessive anthropomorphism, self-efficacy, or competence). Although no counterproductive effects emerged within the observed data range, future research should test whether extreme levels yield diminishing or negative effects, using curvilinear modeling, experimental manipulation, or experience-sampling designs. Last, because cultural values were not directly measured and no cross-cultural comparisons were conducted, the cultural interpretations offered here remain tentative; future studies could test construct equivalence and enhance generalizability through cross-cultural research.
Conclusions
This study demonstrates that both service robot anthropomorphism and employee self-efficacy enhance employees’ perceptions of usefulness, ease of use, and competence, which, in turn, increases collaborative intention and improves collaborative performance. These perceptions serve as mediators connecting anthropomorphism and self-efficacy to collaborative performance. This study advances theoretical understanding of how these factors shape human–robot collaboration and offers practical guidance for integrating service robots into the hospitality and catering industries.
Footnotes
Acknowledgment
The authors thank the editor and anonymous reviewers for their valuable comments and advice.
Authors’ Contributions
Y.C.: Conceptualization, formal analysis, funding acquisition, methodology, project administration, supervision, validation, visualization, writing—original draft, writing—review & editing. X.H.: Conceptualization, investigation, methodology, software, validation, visualization, writing—original draft. M.L.: Funding acquisition, writing—review & editing. W.L.: Validation, writing—review & editing.
Author Disclosure Statement
No competing financial interests exist.
Funding Information
This work is supported by the Humanities and Social Sciences of the Ministry of Education of China (No. 24YJA630003), the Natural Science Foundation of Anhui Province (No. 2208085MG183), and the Anhui Province Social Science Innovation and Development Research Project (No. 2024CX067).