
Abstract
While operating a manually driven or even a highly automated vehicle, drivers may need to quickly perceive and respond to road hazards. In this study, we investigate several factors that might influence drivers’ ability to rapidly recognize road hazards in real-world settings. Using the publicly available Road Hazard Stimuli dashcam footage set, we divided stimuli into videos from highway and non-highway environments. We also developed the concept of “traffic clutter,” which is the area of the video screen containing other vehicles, and divided videos into those with high or low traffic clutter. Half the video clips showed road hazards occurring, and the other half showed another snippet from the same dashcam footage without a road hazard. Forty participants viewed these short, 233 ms video clips and responded whether they detected a road hazard or not. Using signal detection analyses, we show that drivers behave differently when responding to road hazards, depending on the context. First, participants were well above chance at detecting road hazards despite the short presentation times. Further, participants had higher sensitivity (d’) to road hazards when viewing videos with high traffic clutter. In terms of participants’ response criterion (c), we found that in both non-highway and high traffic clutter scenarios, drivers were more willing to commit false alarm rather than miss hazards. This difference in hazard response strategies may reflect biases drivers have developed during their time on the road.
Keywords
Introduction
As advanced driver assistance systems (ADAS) and automated vehicle technologies become more prevalent, the driving task is evolving. Drivers perform fewer manual control activities, increasing the likelihood of distraction. However, they are also expected to maintain awareness of the driving environment and be ready to quickly take control in the event of automation failure (Horswill, 2016). In such takeover situations, the driver must rapidly assess the driving environment for road hazards and quickly maneuver to avoid an accident. The ability to quickly perceive and respond to hazards in the driving environment is critical to safe driving and is of specific importance to the design of ADAS and automated driving systems.
Using the Road Hazard Stimuli set, a curated collection of dash cam videos, Wolfe et. al. (2019a) demonstrated that drivers can recognize road hazards in as little as 250 ms, about the time it takes to make a single eye movement (Rayner, 1998). Such rapid perception of road hazards may involve both selectively attending to individual objects and non-selectively processing holistic scene information (Wolfe et. al, 2017; 2019a; 2019b; 2020). Indeed, recent theories of visual attention have posited that humans have both selective and non-selective pathways for processing visual information (J. Wolfe, 2021) and such models are starting to inform theories of driver attention and perception.
Drivers must constantly monitor the road scene for hazards and search for relevant objects such as road signs and other vehicles. During visual search, attention guides th e selective pathway to choose one or more elements in the visual scene and bind their features into recognizable objects (Treisman & Gelade, 1980). This pathway would be used to recognize vehicles, read road signs, and identify landmarks. In contrast, the non-selective pathway processes information rapidly and holistically from the entire visual field, especially the periphery, supporting fast scene recognition (e.g., Green & Oliva, 2009a). This pathway would be used to extract scene gist (e.g., urban vs. rural) and detect anomalous motion signals requiring scrutiny via selective attention. Information from the non-selective pathway can guide the selective pathway towards objects that are most likely to be the target of the current search or that require further processing (J. Wolfe, 2021). In hazard perception, this information could be brake lights flashing in the periphery, or a slight change in orientation of a nearby vehicle that indicates a course change that may conflict with your own. Traditional hazard perception research has focused almost exclusively on search strategies over time (Horswill, 2016), but recent evidence suggests that information from the non-selective pathway also plays an important role in the perception of road hazards via scene gist processing (Wolfe, et al., 2019a; Wolfe et al., 2019b).
In both static images and brief videos, participants in lab settings can detect road hazards in as little as 250-400 ms (Wolfe, 2019b; Huestegge and Bockler, 2016). Further, this perceptual threshold is impacted by different factors including age (Wolfe et al., 2019a) and number of objects in the environment (Sanocki et al., 2015). Little research has investigated the holistic, rapid perception of road hazards, but there is evidence to suggest that both traffic density and road type may influence road hazard perception.
Traffic Density
Holistic perception relies on visual information from the periphery of the visual field. Peripheral vision is degraded compared to foveal vision, and this degradation is likely due to a heightened vulnerability to clutter rather than a loss of resolution (Rosenholtz, 2016). This susceptibility to clutter can be seen in a phenomenon called visual crowding; when elements in the periphery are closely flanked by one another, they are more difficult to discern. Visual crowding affects the processing of complex stimuli such as faces (Martelli et al., 2005) and is considered to be relevant for a broad range of stimuli and tasks, including scene perception (Rosenholtz, 2016).
Evidence suggests that traffic density induces a cluttering effect where the number of vehicles in a road scene, particularly in the periphery, increases the likelihood that drivers miss hazards like vulnerable road users (Sanocki et al., 2015). Furthermore, higher traffic densities impact driver situation awareness (Heenan et al., 2014) and result in poorer takeover quality and response times (Gold et al., 2016; Radlmayr et al., 2014). While traffic density has been shown to induce a cluttering effect in the rapid processing of static images, this effect has yet to be demonstrated in the context of real-world videos, which are considered to more closely reflect real driving tasks (Wolfe et al, 2019b).
Road Type
The driving task can be substantially different when driving in highway versus non-highway environments. Road type has been shown to influence driver performance in both hazard detection and situation awareness tasks (Burge & Chaparro, 2018; Plummer et al., 2019; Wolfe et al., 2019b). In non-highway environments like cities, drivers become more sensitive to detecting hazards and respond to them more conservatively (Burge & Chaparro, 2018; Plummer et al., 2019). This is thought to be a result of the complexity of the city driving environment (e.g. cross traffic, traffic signs, pedestrians, etc.).
Highway driving, on the other hand, typically consists of multiple lanes of traffic divided by direction. Highways tend to have fewer curves, higher speeds and no traffic lights, which fosters faster response times and a greater bias towards responding “hazard present” in ambiguous situations (Plummer et al., 2019). Research also suggests that sparse highway environments make it more difficult for drivers to discriminate things like vehicle speed compared to more dense urban environments (Wolfe et al., 2019b). While the effects of road type have been widely studied in hazard perception research, road type has not been studied in a rapid and holistic hazard perception task.
Current Study
This research studies drivers ability to rapidly assess road hazards across different road environments and traffic densities using short video clips equivalent to a single glance. While the task lacks some ecological validity (shorter viewing times; hazard detection rather than driving simulation), our focus was on how drivers make instantaneous judgments about the presence of road hazards. As such, we identified the following hypotheses:
Hypotheses
High levels of traffic clutter will result in poorer hazard sensitivity (d’), compared to low traffic clutter.
Highway road environments will result in higher sensitivity (d’) compared to non- highway environments.
Participants will have a lower criterion (c) for high traffic clutter than low traffic clutter.
Participants will have a lower criterion (c) for highway than non-highway.
Method
Design
This experiment followed a 2 (Traffic Clutter: Low vs. High) x 2 (Road Type: Highway vs. Non-Highway) within-subjects design, for a total of four conditions. We employed signal detection theory analyses (Green & Swets, 1966; Macmillan & Creelman, 2004) to separately quantify participants’ ability to detect road hazards (sensitivity, d’) and bias (criterion) when responding to them. While sensitivity is an unbiased measure of detection performance, criterion reveals what sorts of errors (misses vs. false alarms) participants were more willing to commit in response to various stimuli. A higher criterion corresponds to more “hazard absent” bias, indicating a willingness to commit more miss errors, while a lower criterion corresponds to more “hazard present” bias, indicating a willingness to commit more false alarm errors. Such signal detection analysis of the data should give insight into how participants’ strategies change depending on traffic density and road type.
Participants
Forty participants were recruited from the San Jose State University SONA research pools or on a volunteer basis. There were 23 females, 16 males and 1 preferred not to say. The average age was 21 years (SD = 4.45). All participants reported having normal or corrected-to-normal acuity and had a current driver’s license. The majority had two or more years driving experience (92.25%). All participants provided informed consent in accordance with human subjects guidelines. Participants recruited through SONA received course credit for their participation, while volunteers received no compensation.
Stimuli
This experiment used a subset of the original video stimulus set developed by Wolfe et al. (2019a) and shared on the open science framework (found at https://osf.io/uq6pc/). Each pair of videos contained one clip featuring a road hazard (target present) and one clip, extracted from the same parent clip that did not contain a hazard (target absent). Videos were captured by ordinary drivers using commercially available vehicle cameras mounted near the center of the dashboard and facing out the front windshield. Driver mirrors were not visible in the recordings and no additional information about the driving context (e.g. speed) was available other than what could be visually determined from the video clip.
A range of road hazards were present in the stimulus set. Specifically, 50% involved dangerous maneuvers by other vehicles, 23% included downstream vehicle collisions, and the remaining 27% consisted of situations where oncoming vehicles traveled in the wrong direction or obstacles obstructed the driver’s path (e.g. animals, objects, or vulnerable road users). All road hazards required action by the driver.
Each video was edited to 233ms in length to reflect the perceptual threshold of rapid hazard perception for 18 to 35 year olds (Wolfe et al., 2019a). To ensure that target present video clips showed the intended road hazard but did not present any visual information about the driver’s response, each video was edited to end precisely at the moment when the driver in the video begins to respond to the road hazard.
Road type was coded using subjective evaluation of each video clip by three independent raters. Highways were considered roadways in which there were more than one lane of traffic, no traffic lights, no cross traffic and access was controlled by onramps. Given the complexity of real-world video clips, evaluators were encouraged to use their own judgment to make road type determinations. Any discrepancies were discussed by the evaluation team until consensus was reached on all videos. The aim of this classification was to establish a concise definition of the visual characteristics of highway videos that captured the “gist” of highway driving. Factors such as time of day, visibility, vehicle speed, and other variables that influence hazard perception were not considered in our categorization process.
Traffic density could not be measured by counting the number of vehicles in the road scene, as previously done by Sanocki et al., (2015). Vehicles in the road scene could be obstructed, too distant to see, or in locations that did not pose a threat to the driver, such as parked behind a fence. To establish a consistent way to measure traffic density, a technique was developed using a six by ten grid superimposed on still frames of each video clip (Figure 1). The number of squares in the road scene containing a vehicle were counted and recorded as a score out of 60. The term “traffic clutter” will be used to refer to this measurement. Pedestrians, cyclists and other vulnerable road users were not considered in the traffic clutter calculation. Of the original 250 video pairs, the videos in the bottom twenty five percent and top twenty five percent of traffic clutter scores for each condition were used in this study.
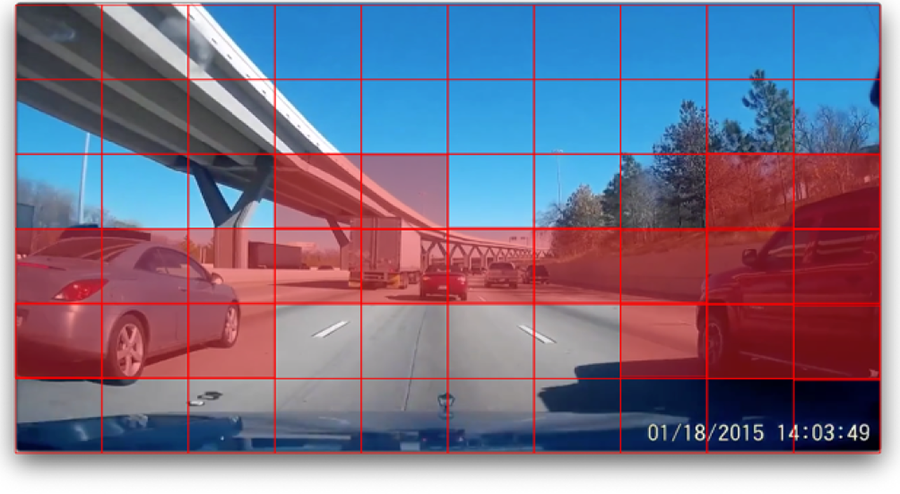
Traffic clutter grid scoring technique.
To ensure that target absent control video clips contained the same traffic clutter score, the same 6x10 grid was superimposed over target absent clips. A timestamp was selected in which the video had the same traffic clutter score as its matched target present clip. In this way, traffic clutter and road type were held constant across target present and target absent clips.
Procedures
Participants viewed road hazard clips on one of two identical Mac Mini computers with identical 17 inch Dell monitors at 1024 x 768 resolution with 60 Hz refresh rate (n = 30) or a standard 2019 Macbook pro laptop with a 15 inch monitor (n = 10). All participants sat comfortably at a viewing distance of approximately 20 inches. Hazard clips were presented using PsychoPy (Peirce et al., 2019).
Upon arrival, participants first received and signed an informed consent and responded to a demographic questionnaire that included their gender, age and driving experience. They were then briefed on the study and given a series of onscreen instructions.
Participants first completed 14 practice trials with feedback on performance. After the practice trials, participants were given a short break before beginning the experimental trials. The experimental trials consisted of 20 target present trials and 20 target absent trials for each of the four conditions totaling 160 trials, presented in random order.
On each trial, a video clip was played that either contained a road hazard (signal) or not (noise). At the beginning of each clip, participants were first shown a white noise mask with a green fixation cross in the middle to orient them to the center of the screen. The mask was shown for 250ms, followed by a 233ms video clip. The stimulus clip was then immediately followed by a second white noise mask, displayed for 250ms. After the post stimulus mask, participants were asked to respond within three seconds to the question “was there a road hazard present?”. Following the participant’s response, the next trial continued after a 500 ms interval. Figure 2 depicts the sequence for each trial.
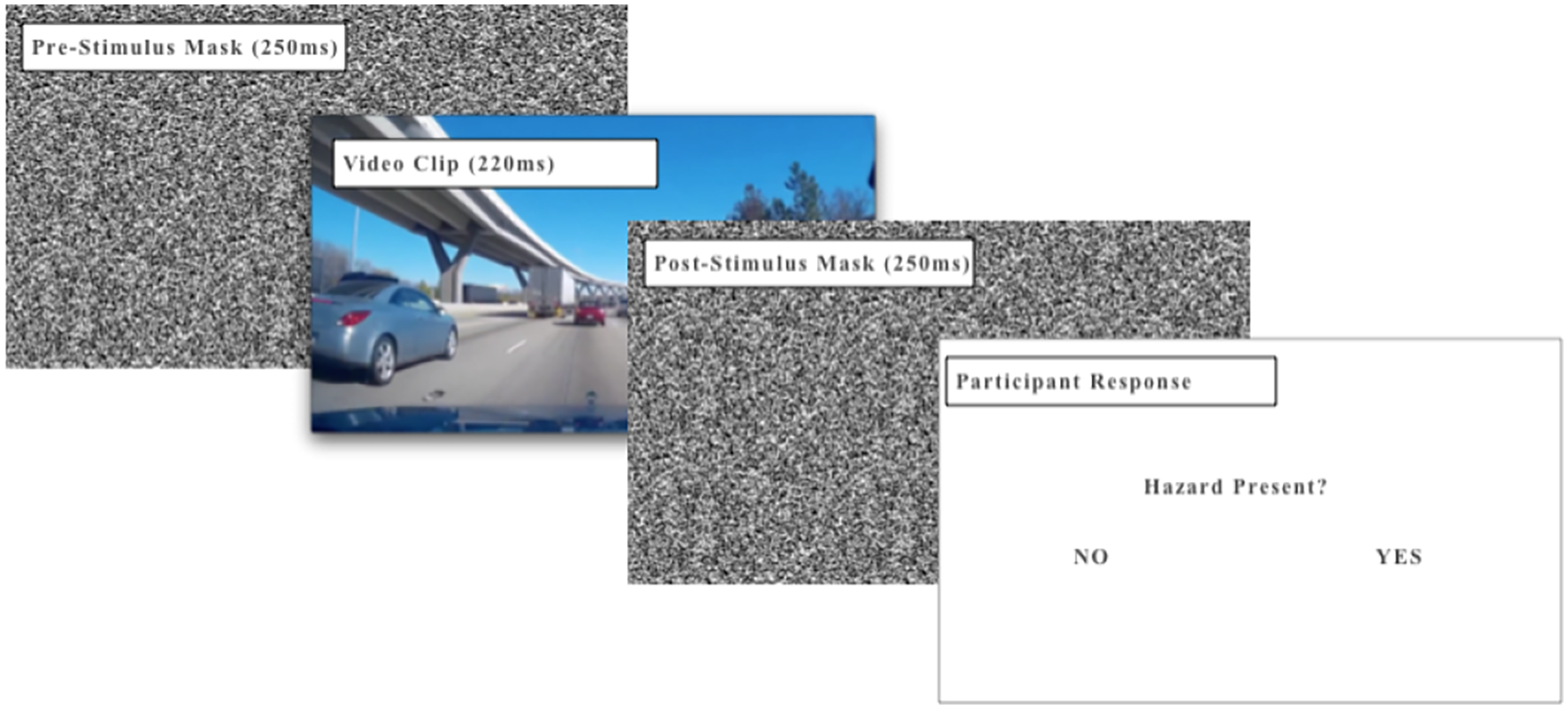
Rapid Road Hazard Detection Task.
To reduce fatigue, participants were given a 30 sec break every 40 trials. The total time to complete all experimental trials was about 20 min. The total experiment time commitment for each participant was 30 min.
Results
Sensitivity
Sensitivity (d’) data were submitted to a 2 (Road Type: Highway vs. Non-Highway) x 2 (Traffic Clutter: High vs. Low) within-subjects analysis of variance (ANOVA). The analyses detected a significant main effect of traffic clutter, F(1,39)=20.694, p<.001, η2=.143 and a significant interaction of road type by traffic clutter, F(1,39)=8.624, p=.006, η2=.056. The main effect of road type was not significant. Planned comparisons revealed that the interaction was driven by sensitivity (d’) scores being significantly better in high clutter compared to low clutter displays for the highway condition, t(39)=5.310, pbonf<.0001, d=1.077, two-tailed, but not the non-highway condition, n.s. See Figure 3 for the sensitivity data.
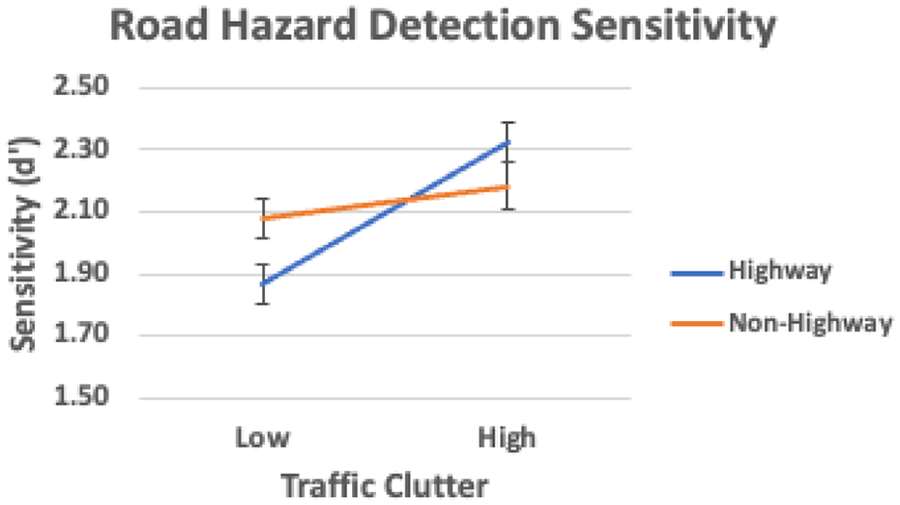
Sensitivity (d’) to road hazards. Higher sensitivity indicates better performance.
Criterion
Criterion data were analyzed with a 2 (Road Type: Highway vs. Non-Highway) x 2 (Traffic Clutter: High vs. Low) within-subjects ANOVA. The analyses detected significant main effects of road type, F(1,39)=119.787, p<.001, η2=.217, and traffic clutter, F(1,39)=273.789, p<.001, η2=.529, as well as a significant interaction of road type by traffic clutter, F(1,39)=17.078, p<.001, η2=.033. All planned comparisons exploring the interaction (with a Bonferroni correction) were significant, all t(39)≥4.282, all pbonf<.001, all d≥.709, all two-tailed, indicating that all data points were significantly different from each other. See Figure 4 for the criterion data.
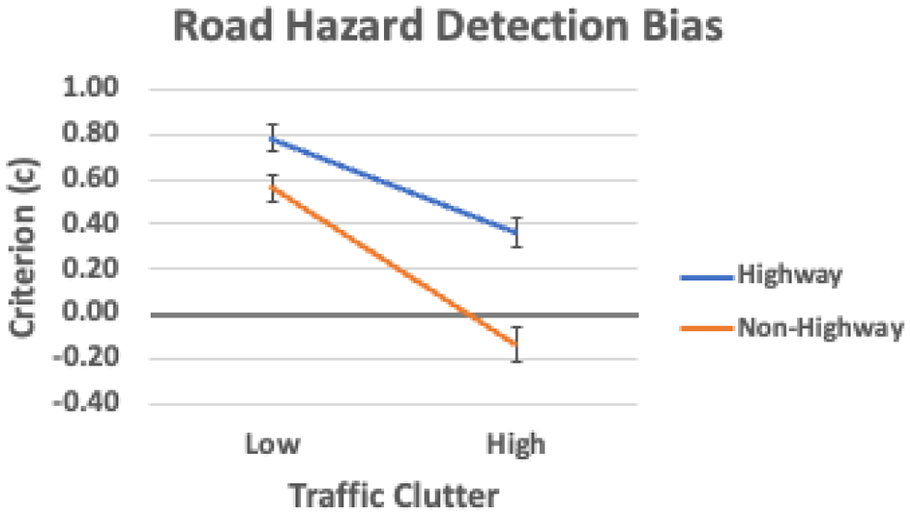
Bias when detecting road hazards. Lower criterion (c) scores indicate more willingness to respond “hazard present,” leading to higher false alarm and lower miss rates.
Discussion
The purpose of this study was to investigate the effects of road type and traffic clutter on the rapid perception of road hazards.
Sensitivity
Hypotheses 1 and 2 investigated the effects of road type and traffic clutter on drivers’ sensitivity (d’) to detecting road hazards. Surprisingly, a significant main effect of traffic clutter was detected, but in the opposite direction of what was predicted by Hypothesis 1. On average, drivers demonstrated a significantly higher sensitivity (d’) to detecting road hazards when viewing video clips that had greater traffic clutter. While this finding is inconsistent with Sanocki et al. (2015) it may be due to the method in which traffic clutter was measured.
Sanocki et al. (2015) used images of unpopulated roadways, and then superimposed pedestrians and vehicles on top, resulting in images with a controlled number of vehicles and hazards. Because our stimuli were real world video clips, it was not possible to control the traffic density to the same degree. The traffic clutter measure provided an acceptable alternative to measuring the traffic in a given road scene, however, it was susceptible to inflated scores in certain scenarios. Because dash camera footage typically employs wide angle lenses, vehicles in close proximity to the camera lens and near the edge of the camera’s viewing area were distorted and took up a larger area of the video compared to more distant vehicles. As a result, many videos with a high traffic clutter score had a large portion of the visual field occupied by a single vehicle to the right or left of the driver, rather than a high number of individual vehicles in the road scene. In this sense, our traffic clutter score may more closely represent vehicle proximity to the driver, rather than traffic density. Given this interpretation, these findings are consistent with theories of visual clutter, which is dependent on the number of objects in the visual field, rather than the proportion of the visual field occupied by an object (Rosenholtz, 2016). Because the high traffic clutter score resulted in a large portion of the visual field being occupied by a single vehicle (or one on each side), it is likely that the videos had a lower number of visible vehicles in the visual field, resulting in greater sensitivity to hazards.
With regard to Hypothesis 2, no significant effect of road type was detected for sensitivity (d’). Participants were equally good at discriminating between signal and noise in both highway and non-highway road scenes.
The significant interaction of road type by traffic clutter was driven by traffic clutter having a significant effect on highway displays compared to non-highway displays. Participants were particularly sensitive to the presence of road hazards in high traffic clutter highway scenes. This finding may also be a result of the “proximity” hypothesis of traffic clutter. In highway environments, there is an expectation that vehicle separation should be greater than in city environments. Vehicles that are close to the driver in highway environments may be more likely to draw the driver’s attention because they are more likely to be the source of a hazard.
Criterion
Hypothesis 3 and 4 investigated driver’s criterion (c) for declaring hazard present or hazard absent across road types and traffic clutter levels. Criterion is often referred to as bias and is distinctly separate from driver’s sensitivity to detecting road hazards. In this study, criterion represents how drivers consider all the factors that go into responding to a road hazard. Higher levels of criterion reflect conservative responses by drivers, where they are willing to miss more hazards in order to reduce their false alarms. Alternatively, lower criterion levels represent a more liberal response by drivers, where drivers are willing to make more false alarms in order to reduce their misses.
As predicted by Hypothesis 3, drivers had a lower criterion in high clutter scenarios than in low clutter scenarios. In these scenarios, drivers were biased towards declaring “hazard present” more often. Consistent with findings by Heenan et al. (2014), decreased situation awareness resulting from high traffic densities may make drivers lower their criterion in an effort to reduce the chances of missing a hazard. Furthermore, additional vehicles in the road scene likely increase the perceived risk to drivers, making the cost of a missed hazard greater. As discussed in the previous section, this result may also reflect a crowding effect, where drivers lower their criterion in response to vehicles that are close by, which may also increase their perceived risk.
Contrary to Hypothesis 4, drivers had a lower criterion, on average, in non-highway compared to highway environments. This means that drivers in our study required stronger evidence before responding to hazards in highway versus non-highway environments. While not directly comparable, our study may contrast with that of Plummer et al. (2019) who described drivers as being more discriminating in city environments due to increased driving complexity and a desire to not “cry wolf”. These discrepancies may suggest that in different road environments, drivers criterion may differ when hazards are processed holistically through the non-selective pathway versus during extended visual search.
This finding is further exemplified by the significant interaction between road type and traffic clutter. Either due to an increase in the number of vehicles in the road scene, or the presence of vehicles in close proximity to the driver, drivers in both highway and non-highway scenarios reduced their criterion for detecting road hazards when traffic clutter was high. This may reflect a tradeoff where drivers weigh the consequences of responding or not responding to a hazard. In situations with high traffic clutter, drivers may have perceived the danger of not responding as higher than the cost of responding and adjusted their response criterion accordingly. This would explain why drivers in our study had lower criterion when traffic clutter was high in both highway and non-highway environments, compared to low traffic clutter in those same environments.
Conclusion
The current study provides evidence to suggest that both road type and traffic clutter can affect how drivers rapidly respond to road hazards. While the proposed measure of traffic density, referred to as traffic clutter, may more appropriately measure vehicle proximity rather than the cluttering effect of vehicles, it had a significant effect on drivers’ ability to detect road hazards. Our findings also indicate that in some situations, drivers may be more conservative in highway versus non-highway road types. These results can be used to improve the development of driver warning ADAS and handover automation that may benefit from contextual consideration. It would be valuable for future research to explore the distinctions between rapid identification of hazards and the visual scanning required for extended search. Furthermore, investigating the dissimilarities between non-highway road types, such as city or rural roads, could provide additional insights.