
Abstract
Assistive robots have the potential to support independence for older adults with mobility limitations and to alleviate the demands of their care partners. Several design considerations are required to ensure that the users can successfully rely on the robot to carry out their tasks. Therefore, building trustworthy robots is necessary for wider acceptance of these assistive robots. Using a participatory design approach, we assessed various aspects involved in advancing the design of a trustworthy robot in home environments. This is a case study focused on supporting an older adult with mobility limitations and his care partner. Through several iterations of co-active development as a team, most of the tasks were accomplished to meet the needs of the older adult couple interacting with the robot. Our approach highlighted usability challenges, the merits of a multidimensional approach in evaluating trust, and co-design strategies to improve the trustworthiness of the robot.
Introduction
Robots are gradually becoming a part of our daily lives, supporting different activities of daily living (Koeszegi et al., 2022). The expectation is that they will become more comfortable, easy to use, and enjoyable as they support activities of daily living, provide companionship, and promote autonomous living (Kidokoro et al., 2013). The use of robots to support daily activities may change the way we assign tasks to humans and other devices and, perhaps more fundamentally, how we perceive our roles in different contexts (Stuck & Rogers, 2018). As the autonomous capabilities of assistive robots improve, the technology must be designed to ensure that we are in control of the technology or that we can rely on the capabilities and safety of the robot while carrying out different tasks (Olatunji et al., 2020). Therefore, designing trustworthy robots is necessary.
Trust can generally be defined as “the willingness of a party to be vulnerable to the actions of another party based on the expectation that the other will perform a particular action important to the trustor, irrespective of the ability to monitor or control that other party” (Schoorman et al., 1996, p.1). In terms of human-robot interactions, trust relates to both the concept of developing robot technology and designing the interaction between the robot and the human such that the human is willing to rely on the robot (Koeszegi et al., 2022, p. VII). Designing towards trustworthy robots focuses on the process of establishing a trusting relationship with robots, thereby extending previous research in this area.
Trust in robots is context dependent. Stuck and Rogers (2018) explored what older adults need to trust an assistive robot in a home environment and found three
Conformity to human norms was observed to embody high predictability and perceived agency, which seem to inspire trust in the users compared to ‘norm-violating’ robots (Frazier, 2023). However, most studies were conducted as online interviews with the users, which eliminated in-person interactions with robots that may impact the users’ perceptions. Also, these studies did not examine or categorize the hierarchy of the aforementioned trust-influencing features. The general categories of trust antecedents highlighted by (Kaplan et al., 2021) are human (personality, self-confidence, general attitude towards robots), robot (performance, reliability, and predictability), and environmental sources (space and proximity to robot, the type of task). The meta-analysis revealed that each of the previously explored individual precursors of trust fit into one of these three categories. Another model of trust by Sanders et al. (2011) identified similar components that contributed to human-robot team trust but included the training and design implications and how these were influenced by both the human and the robot qualities. None of these studies were task specific. However, Langer et al. (2019) noted this gap, highlighting the necessity to define a context for the interaction. To support this, they proposed, through a review, design features for a trustworthy robot in rehabilitation (summarized in Table 1).
Design features for a trustworthy robot in rehabilitation (Langer et al., 2019).

We evaluated trust through an in-person interaction scenario involving an assistive robot in a home environment. The aim was to elicit factors that would contribute to a trustworthy robot design based on the users’ experience and direct interaction with the robot supporting them with tasks in a home environment. The context involved a case study of an older adult couple who used an assistive robot for tasks of daily living within their home.
We used a participatory design approach to explore the following questions related to trust: What are tasks an older adult can trust the robot to perform for them in their homes? What trustworthy behaviors should a robot have, that would motivate the users to want to rely on the robot? Is there a task-specific relationship between the autonomy of the robot and trust?
Method
Human-Robot Interaction (HRI) Considerations
Designing a trustworthy robot involves considering the key components of human-robot interaction to ensure that the users perceive the robots as safe and reliable and are willing to use them. The HRI framework proposed by Rogers and Mitzner (2017) highlighted the characteristics of the human (e.g., psychographics, abilities), robot (e.g., appearance, capabilities), tasks (e.g., proximity, precision), and interaction context (e.g., living environment, role of robot). Factoring these aspects into the design of a trustworthy robot requires holistic development through collaboration from various disciplines to pool expertise, methodologies, and knowledge. Even though not all these aspects were fully implemented in this study, we took steps to constitute a multidisciplinary team that considered different aspects of these frameworks in the design. Working through a participatory design approach, we worked toward functional adaptation of the robot that will foster trust in the robot.
The multidisciplinary team was a collaboration between Hello Robot (company that developed the robot), the University of Illinois Urbana-Champaign (human factors expertise), and the University of Washington (user interface design). The two participants in this case study were a non-speaking older adult male who has quadriplegia and his wife as his primary care partner, who are both pioneers of Robots for Humanity – a non-profit organization dedicated to supporting the development and testing of assistive technology solutions.
Robot Overview
The Stretch robot is a mobile robot manipulator designed to support everyday activities using a lightweight telescoping arm mounted on a mobile base (see robot in Figure 1). The care recipient controlled Stretch via a web-based user interface. His spouse interacted with Stretch using voice commands and an screen interface. The robot can be operated at three levels of robot autonomy (Beer et al., 2014) - teleoperation (the user controls the robot’s actions), semi-autonomy (the user selects options, the robot carries it out), full automation (the robot executes all actions).

Stretch Research Edition robot (RE1) by Hello Robot (Hello Robot, 2020; https://hello-robot.com/product).
Procedure
We conducted four design cycles of user testing, feedback, and development. We embedded the robot, along with Hello Robot staff, into the couple's home to support their daily activities. The aim of conducting the study in cycles was to provide time for the interdisciplinary team to review the findings and improve Stretch’s design, including the control components of the web interface, based on the participants’ feedback.
Prior to embedding the robot, we conducted interviews via Zoom with both participants to identify specific tasks they would want Stretch to support them in the area of self-care, productivity, and leisure using the Canadian Occupational Performance Measure (COPM; Law et al., 1998). The participants used Stretch to perform the prioritized tasks they mentioned in the interviews. These interactions with Stretch were about 2-3 hours each day. In addition to the prioritized tasks, the participants were encouraged to perform other tasks with Stretch to explore various use cases that could assist them in their daily activities. To support their ability to use Stretch to do their activities, we developed functional prototypes of the necessary tools for Stretch and refined the user interface features to support the ease of use and reliability of the participants’ interactions with Stretch. We then evaluated their perceptions through interviews, questionnaires, and on-site observation regarding their willingness to trust the robot in the different tasks they carried out with the robot.
Prioritizing Tasks
The COPM's five-step interview process was used to identify the participant's problem areas and create baseline measures. It also provided a rating of the participants’ priorities in order of importance rated on a 10-point scale, which then provided the basis for goal setting. We narrowed down these problem areas to the five most important main tasks for the care recipient and four tasks for the care partner. The prioritized tasks for the care recipient, emerging from the COPM rating, were self-feeding, maintaining comfort, flipping a light switch, meal preparation and clean-up, and social participation through a group game. The prioritized activities for the care partner were physical exercise, meal preparation, household cleaning, meal preparation, assistance with laundry, and social participation with the care recipient.
Measures and Materials
Semi-structured interview
The semi-structured interview was designed to (1) identify problem areas in performing tasks of daily living, (2) provide a rating of user priorities for these tasks, and (3) evaluate performance, satisfaction, and willingness to trust the robot before and after interacting with the robot.
Robot trust questionnaire
Using keywords from Ullman and Malle (2018) analysis of human-machine trust (with 20 items), we developed this measure to focus specifically on the capability and reliability dimensions. We adapted the measure to each task the participants carried out with the robot.
Behavioral attributes
Participants were observed to see their attitude and willingness to use the robot to accomplish the tasks with the robot.
Analysis Procedures
The communication in the interviews with the care recipient captured through the text feature on zoom was documented. The interview with the care partner was recorded, and transcripts were prepared for analysis. These transcripts were analyzed via thematic coding to identify themes related to trustworthiness of the robot. The questionnaires and field observations were also analyzed to extract key topics: (1) tasks where they would want to rely on the robot to perform as expected (2) understanding the reasons for their responses, (3) identity potential factors that would contribute to the trustworthiness of the robot. This information was used to inform the development team of the perspectives and expectations of the user about building trustworthiness in an assistive robot for daily tasks.
Results
The care recipient performed most of his activities with set-up assistance to prepare his environment for task performance and enhance his social-emotional well-being when engaging in social participation tasks. The care recipient’s increased independence with doing his daily activities enabled his care partner to participate in her leisurely activities, such as hiking and exercising, which were often unobtainable due to her care demands. The care recipient also played an active role in assisting his care partner with household tasks, such as towing a laundry basket and meal preparation and clean-up, which restored his role of helping his wife (care partner) with these shared responsibilities as he previously did prior to having a stroke. The care partner was also able to accomplish the prioritized tasks with some set-up assistance to get the robot running.
Trust Assessment
Discussion on the willingness of the participants to trust the robot based on their interactions with the robot when performing various tasks reflected a varying range of perceptions from the care recipient and care partner. We share a few highlights of the responses to the task-specific trust questions.
Self-feeding: The care recipient was unsure if he could rely on the robot to perform as expected in this task. The reason he stated is as follows, “arm tasks are 100% predictable; tasks using the automated base movements are 100% random”.
Scratching itches: When asked if he would be willing to use the robot to perform this task again, he responded, “Yes, because I know not to move the base once it’s set up.”
Adjusting blinds: When asked if he had the confidence to allow the robot to perform this task autonomously without your supervision? He responded, “We never even tried this autonomously; too delicate.”
Meal preparation and clean up with his care partner: When asked if he would be willing to continue to use the robot for this task? He responded, “Yes! It is not autonomous yet [and therefore accurate but extremely arduous].”
Robot Reliance
Overall, results showing the care recipient’s willingness to rely on the robot revealed that for about 67% of the tasks, he was willing to trust the robot, whereas, for 11% of the tasks, he would not be willing to trust the robot. For about 22% of the tasks, he was willing to give it a try but not fully confident. The rating for his willingness and his partner’s willingness to rely on the robot is provided in Table 2.
Task-specific rating of willingness to rely on the robot.

The care partner was willing to rely on the robot and for 100% of the tasks was willing to trust the robot. However, for the ease of using the voice commands to control the robot, she expressed that the voice commands are not often reliable.
Attitude and Behavior towards Robot Autonomy
The results revealing the attitude of the participants (based on their comments) and behavior of the participants (based on observations) towards the autonomy of the robot and their willingness to rely on the robot are provided in figure 2.
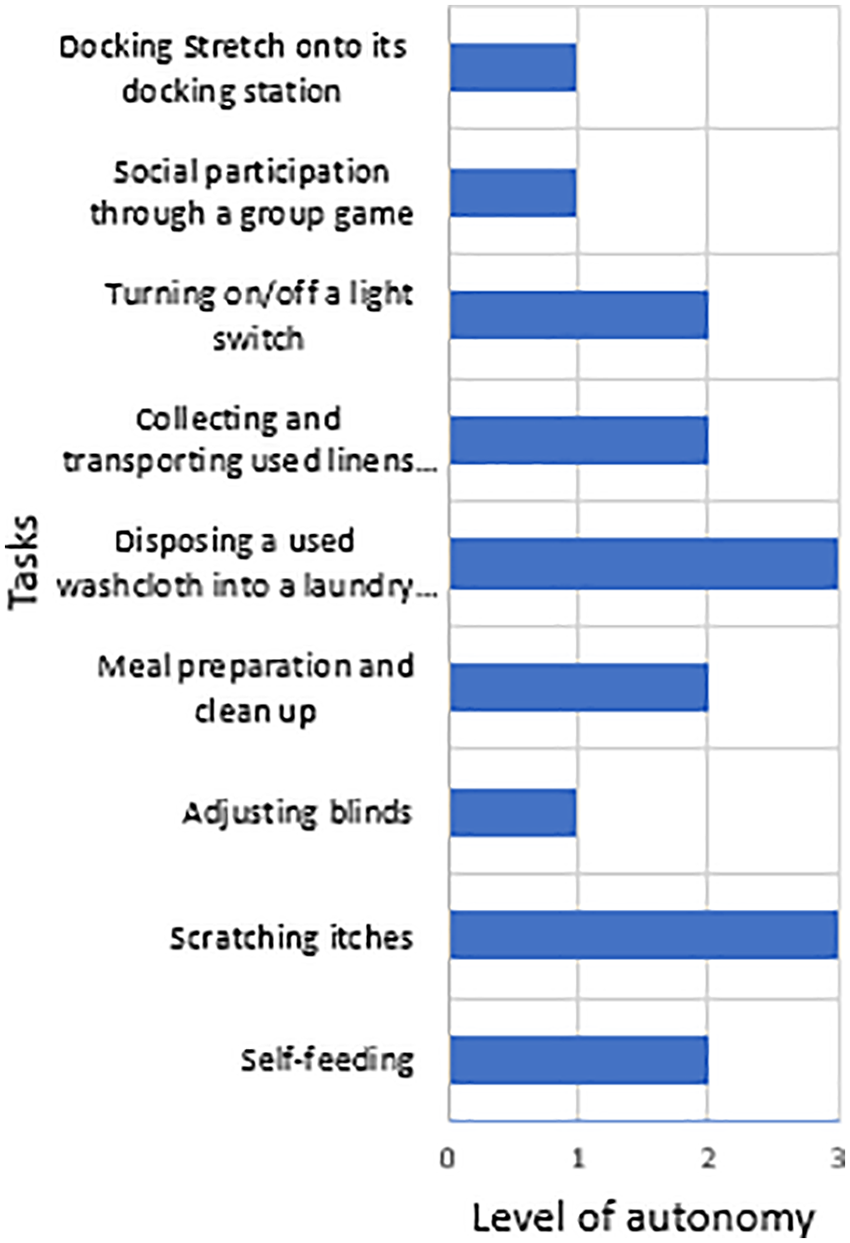
Care recipient’s preferred level of autonomy for the different tasks. Level of Autonomy: 1 Teleoperation 2 Semi-autonomy 3 Full automation.
Discussion
Designing Trustworthy Robots
Given that there are a variety of needs and preferences regarding daily living tasks, it is critical to evaluate the perspective of the users on what would encourage trust in the robots for these tasks. Hence, the task-specific approach to the evaluation of trust provided a finer-grained iterative approach to the development of a trust-worthy robot that the users can rely on for various tasks. The benefit of the task-specific approach over the general is seen in the results from the care recipient and care partner. Even though there were differing overall ratings of trust for them both, the specific task-related evaluations revealed tasks and aspects of the robot where it was reliable or not reliable, which influenced their degree of trust in the robot. It also gave the opportunity for them to express reasons why they would not trust the robot for some other tasks (e.g., adjusting the blinds). This points to the emphasis made by Rogers et al. (2017) in their explanation of task constraints, where they stated that task variations usually influence the design of the robot and the success of the overall HRI. We relate this to the design of a trustworthy robot as well.
There are general details in the task execution, which include minimizing error, error recovery, error mitigation, and transparency of the actions while performing the task. However, other details are task-specific, such as consideration for the criticality of the task. Some tasks require a certain set of requirements for speed and accuracy (e.g., the exercise session with the robot), which worked with timing, coordinating its movement with the user’s steps, counting for repetitions, etc. Sometimes aspects of the task need to be done promptly (e.g., delivering the utensils during mealtimes, such that eating is not delayed); however, some tasks may accommodate longer navigation times (e.g., disposing a used washcloth into a laundry basket). The requirements for the robot in these varying types of task criticalities should be considered in the design to ensure the robot can adapt to differences in task criticality.
Some tasks require certain require coordination of dynamic actions by the robot and user simultaneously (such as the meal preparation task, exercise task, or scratching itches) as opposed to a task where instruction is just given to the robot, and it can do it without real-time monitoring (e.g., transporting used linens in a laundry basket to the laundry room when done autonomously).
Furthermore, in some cases, the robot may need to use a tool or object to perform a task, such as self-feeding where the robot needs to pick a spoon, or in the laundry task, where the robot needs to get a laundry basket. This would require a certain level of dexterity, effectiveness, and certain degrees of flexibility and maneuverability to be able to accomplish those tasks. These usually vary by task, and the ability of the robot to perform these tasks effectively influences the degree to which the users are willing to rely on the robot for these tasks.
There are differences in the delicateness and precision required for these tasks. As an example, in the task of shutting the blinds, the user was careful about the glass windows and the precision needed to pull the ropes that adjust the blinds. These considerations are relevant for delivery tasks; for example, the delicateness of delivering a set of utensils that include glass cups is different from the delicateness of delivering used laundry linens. Thus, different degrees of precision by the robot are required, which need to be considered in the design as we aim towards robots that the users can trust for these tasks.
Ultimately, these considerations point to the context of the interaction, which influences the kind of tasks involved and considerations that need to be made as we aim for trustworthy robot designs.
Measuring Trust
In this study, trust was evaluated using three different tools: interviews, questionnaires, and real-time observations as behavioral measures. These provided a more comprehensive understanding of the perspectives and expectations of the users regarding trusting the robot compared to a uni-dimensional measure of trust. For example, the behavior of not using the autonomous function of the robot for adjusting blinds was better explained in the questionnaires and interview sessions, where more of the reason for that behavior was expounded. It pointed to the need to improve accuracy in the navigation of the robot, precision in its manipulation, and predictability to make it easier to rely on.
These outcomes inspire the need to measure trust from a multidimensional perspective, as emphasized by Sanders et al. (2011). It also points to the need to carry out these evaluations in relation to specific task components and not just as a post-evaluation survey for the task as a whole. Although the latter has its merits to help see the bigger picture of the degree of confidence the users have in relying on the robot, it may not provide sufficient details for some of the design considerations that need to be made to improve the trustworthiness of the robot for specific tasks. A multidimensional approach involving surveys, interviews, frameworks, behavioral and physiological measures (where possible) is therefore recommended.
It is also worth noting that time influences the degree of trust that users have in robots. The dynamic nature of trust through the lens of temporal influences (both the moment of the interaction and the moment of measurement) influences the outcome of trust evaluations (Kaplan et al., 2021). This should be considered during iterative developments, by providing sufficient time for the users to explore the use of the robot while learning, as this may affect their confidence in using the robot for different tasks (Klebbe et al., 2022). Trust in the robot may be higher for successful tasks but may drop over time if the robot does not perform consistently at the level of expectation over time. In a different task, which may have a higher level of difficulty, the user may not initially trust the robot while working with it, but over time with consistently satisfactory performance, trust in the robot may build. Developers should consider this during iterative developments, and researchers evaluating trust should be mindful of changes in trust levels that could occur over time and thus may therefore evaluate at different times during the interaction with the robot (e.g., pre-interaction, during the interaction, and post-interaction).
Implementing Trust in Robots
Communicating trust
The care partner’s comment on reliability as connected with communication says a lot about users' willingness to trust the robot better when it can effectively communicate its current state and what it intends to do. This would also contribute to the predictability of the robot, which the care recipient emphasized in his responses.
Fluency in interaction
Time is critical in the interaction, and the criticality of this as relevant to different tasks should be incorporated into the design of the robot (e.g., the robot may have an interface that preloads specific operating characteristics such as speed, manipulator movements for specific tasks that are time critical).
Usability testing
Testing to ensure the safety of the interaction with users and effectiveness, efficiency, and satisfaction while using robot matters. Failure recovery, repeatability, and accuracy of outcomes should be tested to ensure the robot identifies when it fails in a task and communicates the recovery plan to the users.
Conclusion
The current study highlights a compelling link between trust in robots and the willingness to use a robot for different activities of daily living. The outcome of this case study deepens our understanding of tasks older adults can trust the robot to perform for them in their homes. It also reveals trustworthy behaviors that a robot should possess at different levels of autonomy for different tasks that would motivate the users to want to rely on the robot, facilitating wider acceptance of robots in for other tasks involved in everyday living. Moreover, our approach illustrates the importance of evaluating task-specific trust and the underlying reasons.
Footnotes
Acknowledgements
This research was supported in part by the National Institute on Aging (National Institutes of Health) Phase I Small Business Innovation Research Grant [1R43AG072982-01]. We appreciate the support of Harshal Mahajan, Megan Bayles, Kavi Dey, Brian Yao, Joe Sluis, Anna Garverick, Vinitha Ranganeni, Nicholas Walker, and Maya Cakmak.