
Abstract
Amphibious robots have great application potential in many unstructured task scenarios, such as environmental monitoring, resource exploration, and maritime rescue, due to their cross-medium movement capabilities and adaptability to multiple environments. As a typical representative of amphibians, sea turtles can not only crawl on land but also have excellent underwater movement ability, which is an important source of inspiration for amphibious bionic robots. However, due to a lack of high-performance soft actuators, suitable bionic structure designs, and effective control methods, most of the current bionic turtle robots actuated by smart materials can only demonstrate movement in a single medium (e.g., swimming in water or crawling on land). Here, an amphibious turtle robot actuated by bionic muscles that can achieve effective movements in two media was designed. To enhance the amphibious ability of the turtle robot, a cylindrical dielectric elastomer actuator that can adapt to a variety of environments is designed with a maximum bidirectional deformation (±65°) and a high output force (∼80 mN). By optimizing the motion trajectory of the fins and programming the phase control of multiple bionic muscles, the robot’s maximum swimming speed reaches 0.4 BL/s. In addition, the robot can realize different motion modes, such as forward, backward, lateral movement, turning, and crawling. Finally, the high mobility and environmental adaptability of the turtle robot are demonstrated in an L-shaped swimming passage and in two mediums (transition from land to water). This work not only improves the motion ability of bionic amphibious robots but is also useful for the motion control of other bionic robots with multiple actuators.
Introduction
With the diversification and complexity of the task environment, robots with a single-motion mode may not satisfy some task requirements, including environmental monitoring, facility inspection, resource exploration, and disaster response in unstructured scenes.1,2 As a consequence, increasing attention has been given to the development of robots with cross-media motion ability and multiple-scenario adaptation. Amphibious robots can work in water and on land; thus, they can overcome the limitations of the environment and show high adaptability and wide application potential.3–6
Bionics is one of the main inspirations for robot design. Inspired by amphibians in nature, researchers have designed biomimetic amphibious robots with different ontology structures and functionalities.7–11 Among amphibious creatures, sea turtles have attracted the interest of researchers due to their fast-swimming speed, motion persistence, and excellent mobility.12,13 In addition, sea turtles can use different motion modes of their limbs to realize both swimming in water and crawling on land. This approach, which employs the same propulsion system for multiple modes of motion, significantly simplifies the structural design of the biomimetic robot. In terms of swimming, to adapt to the marine environment, the limbs of sea turtles have evolved into flattened flippers, which generate forward thrust through up-and-down flapping motions.14,15 During the flapping motion, the flippers do not move vertically but instead have a certain angle of inclination, and this movement may not only conserve energy and generate greater thrust but also adjust the turtle’s body posture, improving swimming efficiency.16–18 In terms of crawling, for mating and reproduction, sea turtles have retained their ability to crawl on land. Sea turtles can crawl by utilizing the friction between their flippers and the ground.19,20 Therefore, the unique morphological structure and movement patterns of sea turtles promote the design of amphibious robots.
By studying both the swimming and crawling characteristics of sea turtles, researchers have developed a variety of biomimetic robots. Traditional amphibious turtle robots are generally rigid and use electric motors as actuating units to realize amphibious movement. Although this kind of rigid robot has the advantages of precise control, strong output force, not easy to damage, good mobility, etc., there also exist several problems to overcome, including poor biocompatibility, large actuating noise, and low energy efficiency due to the rigidity, weight, and complexity of the ontology structure.21–25 Recently, with the development of materials science and bionics, soft turtle robots actuated by smart materials have been rapidly developed. Smart materials have unique characteristics such as continuum, compliance, low actuating noise, and self-adaptability,26–32 providing new functions that rigid robotic turtles cannot achieve and enabling soft robotic turtles to have better intrinsic safety, stealth capabilities, and human–robot interaction performance. For example, Li et al. proposed a turtle motion-inspired robot in which the flippers are actuated by an antagonistic shape memory alloy (SMA) spring, which can crawl via two motion mechanisms (electromagnetic adsorption and pneumatic adsorption). 33 Song et al. proposed a bionic turtle fin actuator based on multiple SMAs, which could be used in autonomous underwater vehicles inspired by turtles. 12 By controlling the activation sequence of SMAs, two different swimming strategies (routine swimming gait and vigorous swimming gait) can be generated, and the maximum swimming speed of the robot can reach 11.5 mm/s. Sun et al. developed a biomimetic turtle robot based on ion-polymer metal composite (IPMC) actuators; the robot is driven by five IPMC actuators, which can swim forward and turn. 34 However, most of the current soft turtle robots actuated by smart materials can only achieve a single-motion mode, such as crawling on land or swimming in water, and cannot achieve cross-media amphibious movement. There are mainly two reasons. First, there exist significant differences in physical properties between the aquatic environment and the terrestrial environment, and the mechanism of how turtles use a single propulsion system to achieve efficient and flexible movement in these two media remains unclear, resulting in insufficient bionic design. Second, there is a lack of high-performance soft actuators that can adapt to various environments, as well as effective control strategies for coordinating multiple driving units, to enhance the movement performance of the robot. Consequently, it is difficult to replicate the flexible movement patterns of sea turtles in the two media.
Here, we developed a novel soft turtle robot actuated by multiple bionic muscles that can crawl on land and swim in water (Fig. 1). To adapt to the turtle-shaped robot and enhance its amphibious locomotion performance, we deconstructed and redesigned the traditional columnar dielectric elastomer actuator (DEA). By biomimicking the muscle-skeleton structure of sea turtle flippers, the coupling relationship between compression springs and dielectric films has been reconfigured, which not only provides large driving deformation and output force (output force 80 mN, bending angle 65°), but also improves the stiffness of the actuator to better support the movement of the robot. In addition, to improve the motion performance of the robot, the influence of different flapping angles (the angle between the body and the flippers) on the propulsive performance was simulated, and the switching mechanism of amphibious motion and flipper coordination strategy of sea turtles were studied. Through programming to control multiple driving units, the omnidirectional swimming ability of the turtle robot has been achieved, including forward, backward, turning, and lateral swimming, and the fast-swimming speed reaches 0.4 BL/s. Moreover, the robot can also crawl on land by mimicking the gait of the sea turtle. Finally, the turtle robot can traverse and return from an L-shaped swimming passage by adjusting its motion modes and cross from land to water to achieve amphibious movement. To our knowledge, this work not only achieves the cross-media movement of a soft amphibious turtle robot actuated by smart materials for the first time, but also the soft actuating method and bionic design concept may provide certain reference significance for other soft robots and flexible electronic systems.
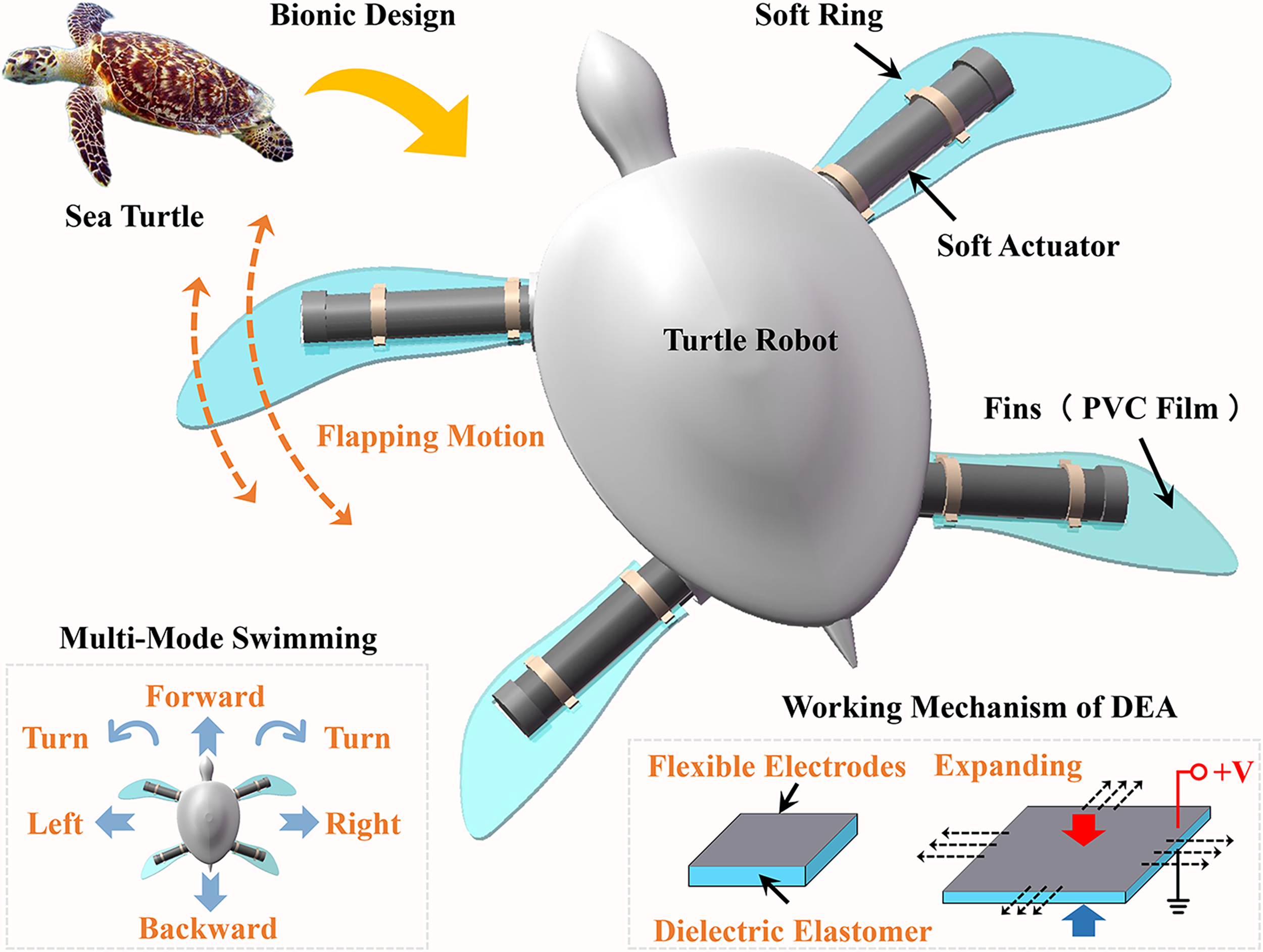
Inspired by the motions of sea turtles, the bionic soft robot can realize omnidirectional swimming and cross-media movement by using multiple bionic muscles based on a dielectric elastomer actuator (DEA).
Materials and Methods
Fabrication and characterization of the soft actuator
The deformability of the columnar actuator primarily arises from the areal strain of the dielectric film under high-voltage electrical stimulation.35,36 Each columnar actuator is equipped with two sets of electrodes and forms two driving units, enabling dual-degree-of-freedom bending motion. The specific fabrication steps for the actuator are as follows (Fig. 2a): First, the dielectric film (VHB4910, 3M Company) is prestretched with a transverse stretch ratio of 3 and a longitudinal stretch ratio of 4. Subsequently, it is laid flat on an acrylic board, with the edges of the film fixed, and left to rest for 5 h to allow for stress relaxation. Second, to ensure that the finished actuator has two aligned rows of electrodes, the positions of the electrodes on the film are calculated beforehand based on the diameter of the spring, and these positions are covered with carbon black ink. Third, the spring and end pillars are connected in series using a lead screw, with both ends secured using nuts, and the dielectric film is wrapped around the spring and end pillars to form a columnar structure. The completed actuator is removed from the screw, and the wires leading from both ends of the actuator are encapsulated using a light-curing adhesive. This not only prevents the dielectric film from slipping off the ends of the actuator but also provides physical insulation, allowing for underwater application. Finally, heat shrink tubing is used to secure and protect both ends of the actuator to prevent damage to the insulation layer.
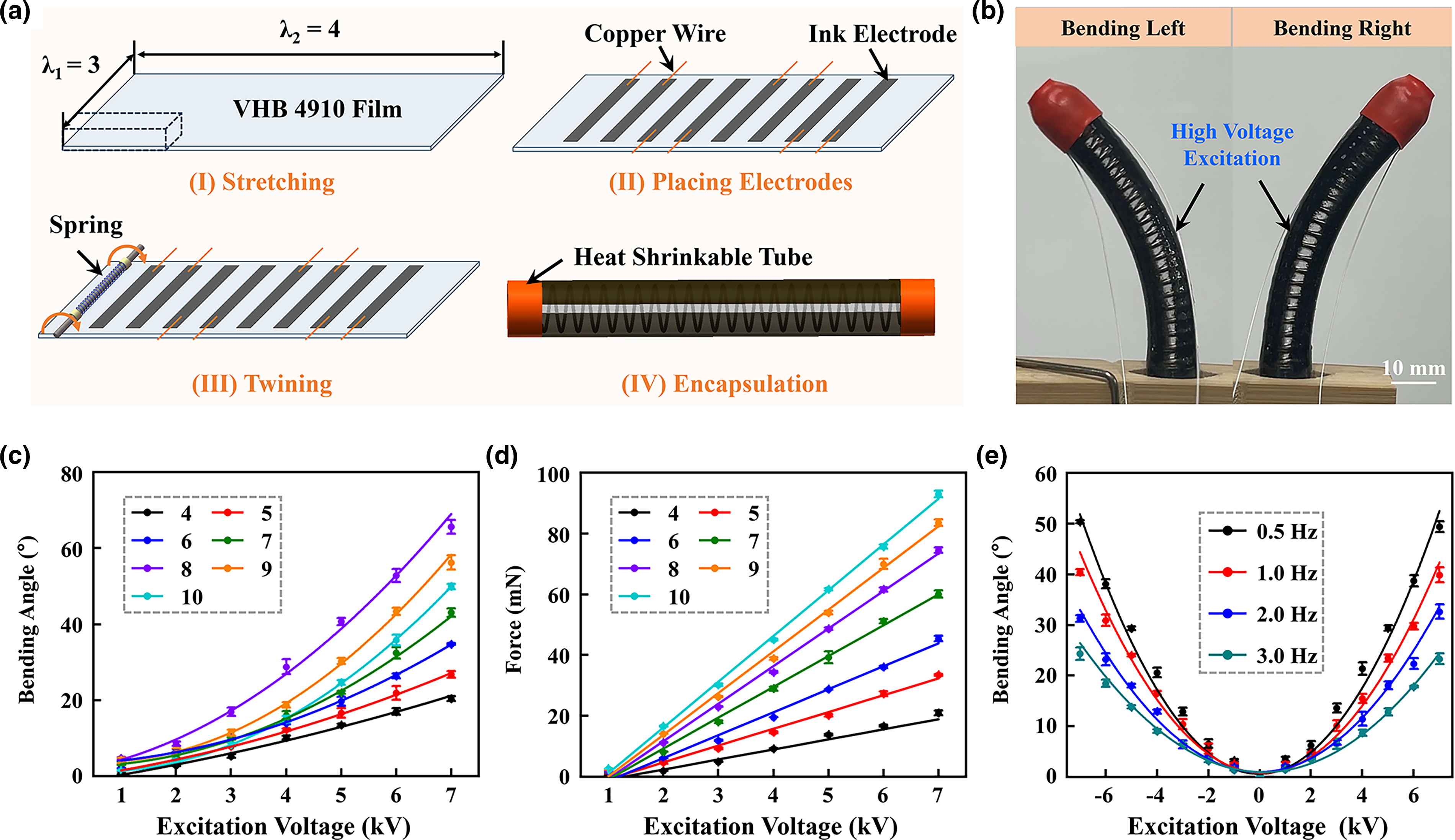
Manufacture and performance of the actuators.
To conduct performance testing of the soft actuator, one end of the actuator is firmly fixed, and the other end can produce free deformation. A high-voltage power supply (Dongwen High Voltage) is used for power, with control of the high-voltage electrical signals achieved using an Arduino R3 control board. The deformation of the actuator is controlled by adjusting the amplitude and frequency of the excitation voltage. The output force measurements of the actuator are performed using a piezoresistive sensor (XSB5-CHK1R2V0). First, the free end of the actuator is positioned at the measurement location of the sensor. When the actuator experiences bending under the excitation of different high voltages, the free end of the actuator will press against the touch point of the sensor, allowing for the measurement of the output force under different actuating conditions.
Motion simulation of the turtle robot
To investigate the optimal deflection angle of the flippers of turtles during swimming, finite element simulation software is used to analyze their swimming posture. First, a three-dimensional model of the turtle robot is created using SolidWorks; thus, it is imported into COMSOL Multiphysics for analysis. The dimensions of the fluid domain are set to 400 × 600 × 800 mm, with the robot model positioned at the center of the fluid domain. The fluid–structure coupling interface built into the software is used to simulate the interaction between the robot and the fluid. The model is meshed using a physics-based meshing approach. A transient solver (fully coupled) is utilized for simulation, with the iteration count set to 10. Flipping functions are applied to the limbs of the turtle robot to induce swinging in different directions, and the resulting changes in forward propulsion force are obtained. Postprocessing involved the use of the software’s built-in plotting tools to generate cloud plots at different time steps for analysis.
Assembly and testing of the turtle robot
First, the turtle robot is modeled using the three-dimensional modeling software SolidWorks and printed using a multimaterial 3D printer (J735, Stratasys, USA). The body of the robot is printed using rigid material. In addition, the flipper of the robot is composed of an actuator and a fin, and the actuator is fixed on the fin by a 3D-printed soft fixing ring. The flexible film (polyvinyl chloride) with a thickness of 100 µm is used for the fins. Finally, the body of the robot and the four flippers are assembled. The overall size of the robot is 19 cm × 12 cm. Robot testing is conducted in a water tank. Power is supplied using a Dongwen high-voltage supply, and high-voltage electrical signals are controlled using an Arduino Unio R3 control board. The motion performance of the robot is tested by changing the voltage amplitude of the high-voltage power supply output and the frequency of the controller output.
Results and Discussion
Inspired by sea turtles, a soft amphibious robot is designed with a body and four flippers, and the flippers include actuators, fins, and fixing rings. The actuators are the main source of power, and each actuator has two independent actuating units, which can actuate flexible fins to produce a bidirectional flapping motion. In water, the flippers interact with the surrounding fluid to generate thrust, and the robot can realize omnidirectional swimming by programming the motion sequence of the four flippers. On land, the friction between the flippers and the ground is used to crawl.
Performance characterization of the soft actuators
The actuator, as a core component of the soft robot, largely determines the propulsion performance of the robot. 37 We chose Very High Bond (VHB) materials as the actuating film to manufacture soft actuators, which can realize large actuating strain, fast response speed, high energy conversion efficiency, and excellent durability, making it more suitable for driving soft amphibious robots.38–40 In addition, to solve the problems of previous DE-based soft actuators, such as weak driving force, small bending angle, and low-frequency characteristics,41–43 we seek inspiration from nature and designed the cylindrical DEA by imitating the muscle-bone-based rigid-flexible coupling structure of the sea turtle’s flippers. Among the actuator systems, the dielectric film is used to mimic the muscle tissue of the flipper, and the multilayer winding design can significantly enhance the actuator’s output force and deformation. The spring has a certain modulus and stiffness and can be used to mimic the skeletal structure of the flippers. Meanwhile, it serves as the rigid framework of the DEA to amplify the actuator’s deformation, reduce the damping of the entire actuation system, improve the response speed of the actuator, and offer certain stiffness support for the entire turtle-shaped robot. Moreover, the performance of the actuator is affected by several factors, such as the excitation voltage, frequency, and number of actuating layers. Therefore, a detailed characterization is necessary.
The cylindrical soft actuator can achieve bidirectional bending by stimulating different actuating units (Fig. 2b, Supplementary Movie S1). First, we performed static bending tests on the actuators. The bending angle of the actuator increased with increasing voltage (Fig. 2c). Additionally, the bending angle of the actuator exhibited an increasing trend followed by a decreasing trend as the number of actuating layers increased. This phenomenon may be caused by the following two reasons: on the one hand, due to the small number of actuating layers, the inherent stiffness of the spring cannot be overcome, resulting in a small bending angle; on the other hand, too many actuating layers may cause the overall stiffness of the actuator to increase, making the deformation more difficult. The experimental results showed that when the number of actuating layers was 8, the bending angle of the actuator was the largest, and the bidirectional bending angle reached 65°. There may be two reasons for this phenomenon: First, when the number of actuating layers is too small, the expansion deformation generated by the actuating layers is not sufficient to overcome the stiffness of the spring itself, resulting in a small bending angle. As the number of actuating layers increases, the increase in the actuating force leads to an increase in the bending angle. However, as the number of actuating layers is too large, the overall stiffness of the actuator increases, and the stress between film layers increases, making it difficult for the actuator to bend.
Furthermore, we characterized the output force of the actuator using a piezoresistive sensor. The results indicated that the output force of the actuator exhibited a continuously increasing trend with increasing actuating layer number (Fig. 2d). When the number of actuating layers was 10, the maximum output force of the actuator was 95 mN. To achieve both an effective actuating force and a greater bending angle, the robot in this paper was actuated by eight-layer column actuators. The frequency response characteristic of the actuator has an important effect on the motion performance of the robot. The dynamic bending angle of the actuator decreased with increasing actuating frequency (Fig. 2e). This may be attributed to the viscoelastic and creep properties of the dielectric film, resulting in increased damping of the actuator, which will affect the dynamic response capability of the actuator.35,36 When the actuating frequency was 3 Hz, the bending angle of the actuator could still reach 25°, meeting the movement requirements of the robot.
In addition, the service life of soft actuators significantly impacts their performance and practical applications, so we systematically evaluated the durability of our DEA in both air and water environments (Supplementary Fig. S1). Experimental data revealed periodic variations in end-point displacement of the actuator (±10 mm in air, ±8 mm in water) with an actuating frequency of 2 Hz (Supplementary Fig. S1a and b). The phenomenon may be caused by the difference in fluid resistance in water and air. Moreover, over 12,000 cyclic tests spanning 100 min, the soft actuator exhibited consistent displacement stability (Supplementary Fig. S1c), demonstrating long-term operational reliability and durability in both media.
Simulation analysis and swimming experiment of the turtle robot
In nature, sea turtles swim through the flapping motion of their flippers. Detailed observations of sea turtle swimming characteristics reveal that their flippers do not simply perform a vertical flapping motion but rather possess a certain inclination angle, and the motion mode of turtles may not only adjust their swimming posture but also reduce their resistance and increase their swimming speed during swimming.15,17 However, the effect of the flipper deflection angle on robot swimming performance is still unclear. Therefore, we conducted simulations on the motion of fins with different inclination angles of turtle robots to determine the optimal deflection angle for enhancing the swimming performance of the robot.
The simulation environment was configured as shown in Figure 3a, and the fluid entered from the front of the robot, while the rear was designed as a pressure outlet. The swinging function of the robot’s limbs was specified to calculate the propulsion force generated by the robot’s flippers pushing the fluid at different deflection angles. The simulation results were depicted in Figure 3b. The swimming speed of the robot increased and then decreased as the angle of the fins increased from 0° to 90°. When the fin angle was 45°, the swimming speed of the robot was the highest. In addition, we verified through the experiment that the swimming speed of the turtle robot was slightly lower than the simulation data, but the trend remained consistent, reaching a maximum speed at 45°. Therefore, we fixed the inclination angle at 45° and conducted frequency tests on the robot. The results showed that the speed of the robot increased and then decreased with increasing actuating frequency (Fig. 3c). When the actuating frequency was 2 Hz, the maximum swimming speed of the robot reached 0.2 BL/s, and the swimming snapshots of the robot were shown in Figure 3d (Supplementary Movie S2).
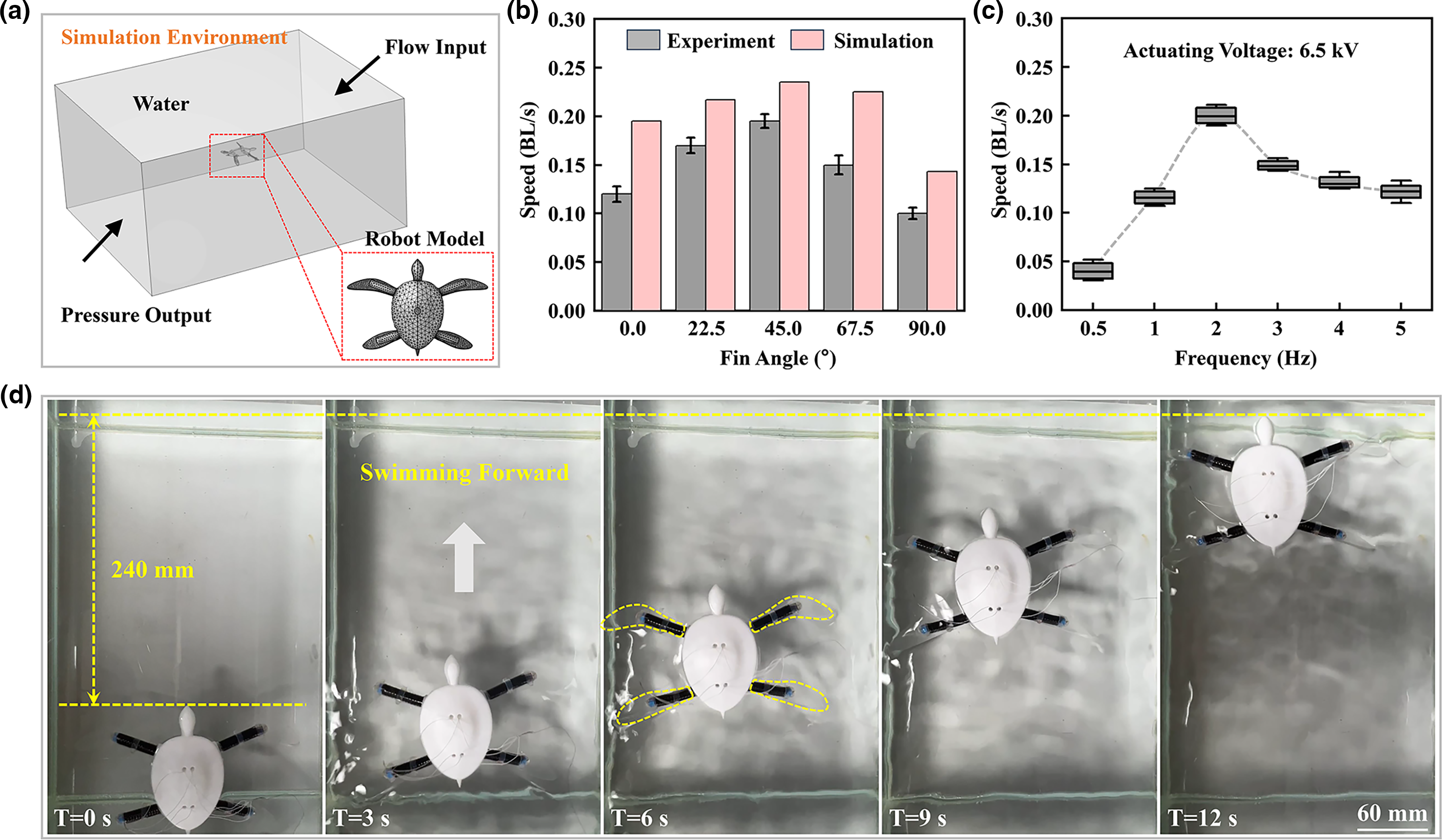
Simulation and optimization of flipper motion of the turtle robot.
Phase control and multimodal swimming of the turtle robot
In the experiment, we found that when the limbs of the robot were actuated synchronously, the robot first moved forward and then backward in an actuating cycle, which reduced the overall swimming speed of the robot. The main reason is that effective thrust is generated when the flippers flap backward, and swimming resistance is generated when the flippers are actuated backward. To reduce the swimming resistance of the robot and improve the overall swimming speed, the four flippers of the robot can be controlled in phases.
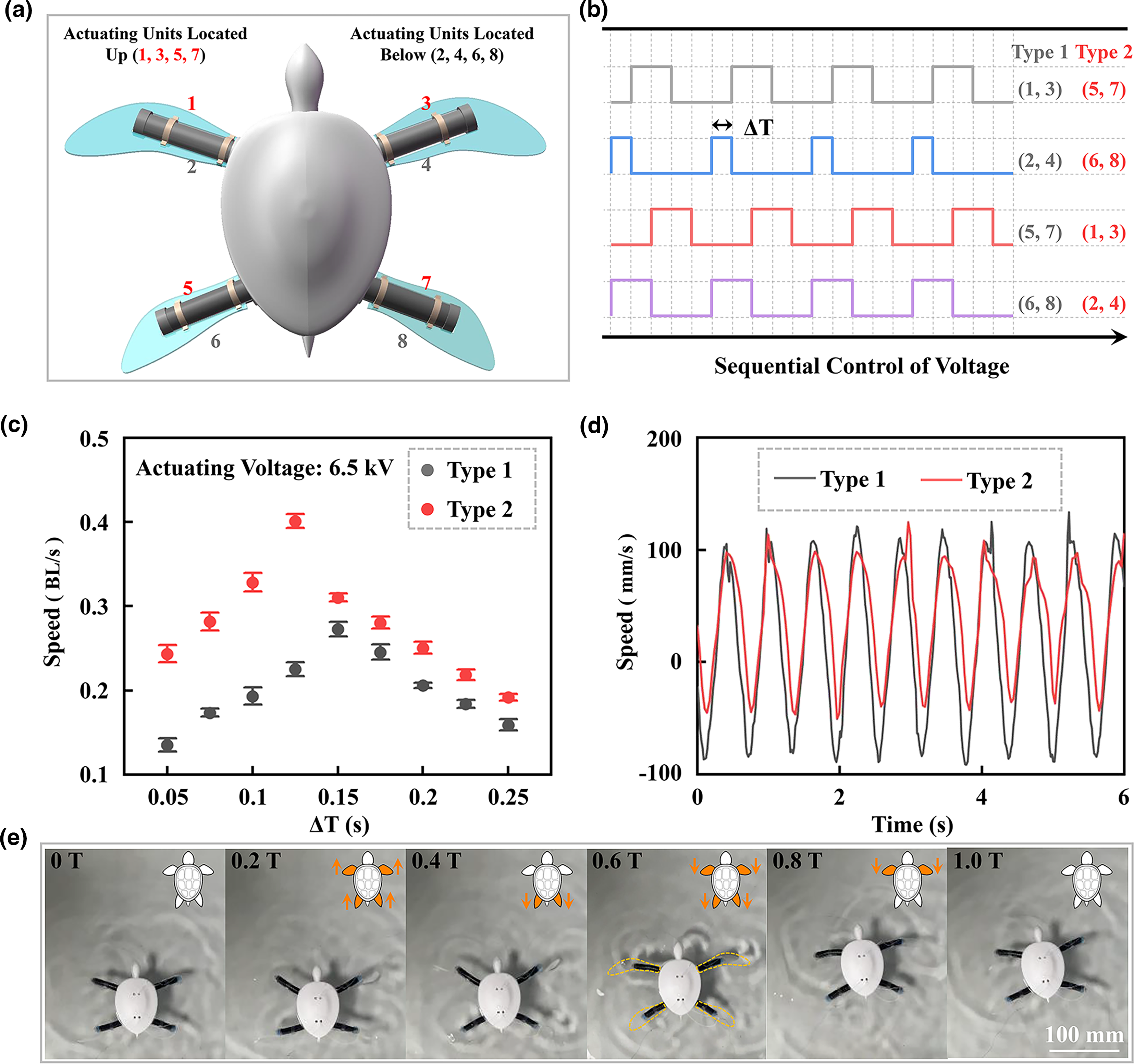
As shown in Figure 4a, the robot has 8 actuating units, which can be actuated independently. We developed two phase-control strategies, named Type 1 and Type 2 (Fig. 4b). The motivation process of Type 1 in a cycle is as follows: in the first stage (0–0.2 T), actuating units 2, 4, 6, and 8 are activated at the same time, so the four flippers of the robot generate forward flipping motion, which enables the robot to obtain a greater swing backstroke. During 0.2–0.4 T, while the actuating units 6 and 8 remain activated, actuating units 1 and 3 are activated to actuate the front limbs to generate back movement. During 0.4–0.6 T, while maintaining the activation of the actuating units 1 and 3 of the front limbs, the actuating units 5 and 7 of the rear limbs are activated, causing the rear limbs of the robot to swing backward. During 0.6–0.8 T, maintaining the activation of the actuating units 5 and 7 of the rear limbs, the activation of the actuating units 1 and 3 of the front limbs is abandoned, allowing them to naturally return to the initial state. During 0.81 T, the excitation of the actuating units 5 and 7 of the rear limbs is canceled, and they are restored to the initial state. Compared with Type 1, Type 2 is different in the order of backward movement of the limbs, where the hind limbs first generate backward flapping motion, followed by the front limbs.
Phase control experiment of turtle robot.
The experimental results showed that the two phase-control strategies effectively improved the swimming speed of the robot compared to the previous control strategy of synchronous activation. Moreover, the Type 2 control strategy was more conducive to improving the swimming speed of the robot, and the robot can achieve a maximum swimming speed of 0.4 BL/s when the activation time (ΔT) was 125 ms (Fig. 4c, Supplementary Movie S3). The instantaneous speed changes under the two types were further compared and analyzed, as shown in Figure 4d. In an actuating cycle, the forward instantaneous velocity produced by the two types is basically the same, while the backward instantaneous velocity under Type 2 is smaller. Therefore, Type 2 is a better control strategy. The swimming snapshots of the robot based on Type 2 in an actuating cycle are shown in Figure 4e.
Furthermore, by controlling the excitation sequence of these eight actuating units, the robot can achieve various swimming modes, including forward and backward swimming, lateral swimming, and turning. For example, by activating actuating units 1, 3, 5, and 7, the robot’s four limbs can simultaneously swing backward to swim forward. Then, by activating actuating units 2, 4, 6, and 8, the robot’s limbs swing forward to swim backward (Supplementary Movie S4). Additionally, the robot can also perform lateral swimming. When actuating units 1 and 6 on the left side of the robot are activated, the two actuators simultaneously swing inward, squeezing the fluid to propel the robot to the right (Supplementary Movie S5). Similarly, by activating actuating units 3 and 8 on the right side, the robot can move to the left (Supplementary Movie S6). Moreover, by activating the two flippers on one side of the robot to generate a backward flapping motion, the turtle robot can also turn 180° (Supplementary Movie S7). Therefore, by controlling the activation sequence of the robot’s limbs, the robot can realize omnidirectional movement, which has high motion efficiency and flexibility.
The crawling motion of the turtle robot
While adapting to the marine environment, turtles still retain their ability to crawl on land. The crawling mechanism of sea turtles mainly relies on the friction between their flippers and the ground to generate forward thrust. Similarly, by adjusting the size and direction of the friction force between the robot and the ground, the turtle robot can also realize crawling movement. The robot’s flippers are equipped with footpads printed using a rigid-flexible coupling method. On the soft base of the foot pads, rigid triangular inclined spines are arranged, which can realize anisotropic friction. The friction in the forward direction is less than the friction in the backward direction under the interaction of the tilted spikes with the ground (Supplementary Fig. S2), and the limbs of the robot can move forward in the desired direction.44–46 Therefore, the robot can obtain the net thrust forward to achieve a crawling motion.
As shown in Figure 5a, similar to most quadrupeds, when turtles crawl, their right front leg and left hind leg move simultaneously, and the left hind leg and the right front leg also move simultaneously. By controlling the excitation phase of the actuating units, the robot can also mimic the crawling gait of the sea turtle. Specifically, each actuating unit is controlled by the square wave signal in Figure 5b. First, actuating units 2 and 8 are activated, and the right front and left hind limbs of the turtle robot are actuated to extend forward. Then, actuating units 1 and 7 are activated, and the right front and left hind flippers generate backward motion. Next, actuating units 2 and 8 are activated, and the left front limb and the right hind limb are moved forward. Finally, actuating units 2 and 5 are activated to actuate the left front limb, and the right hind limb generates backward motion. We characterized the crawling speed of the robot with different excitation times (ΔT), and the results showed that the crawling speed of the robot first increased and then decreased with increasing excitation time (Fig. 5c). When the excitation time was 200 ms, the crawling speed of the robot reached 3.6 mm/s, and the crawling snapshots of the robot were shown in Figure 5d (Supplementary Movie S8). Overall, the crawling speed of the robot is relatively slow, and the possible reasons are the frictional resistance between the robot's body and the ground, as well as the assembly limitations of the actuators. On the one hand, when the turtle robot crawls on land, the robot’s body will come into contact with the ground due to the effect of gravity. Therefore, when the actuator pushes the robot, it needs to overcome the friction between the robot’s body and the ground. On the other hand, when assembling the robot, one end of the actuator needs to be inserted into the robot’s body for fixation, which may also limit the deformation of the actuator and thus affect the crawling speed of the robot. In the future, the crawling speed of the robot can be increased by enhancing the performance of the actuator, improving the control method, and optimizing the structure of the robot.
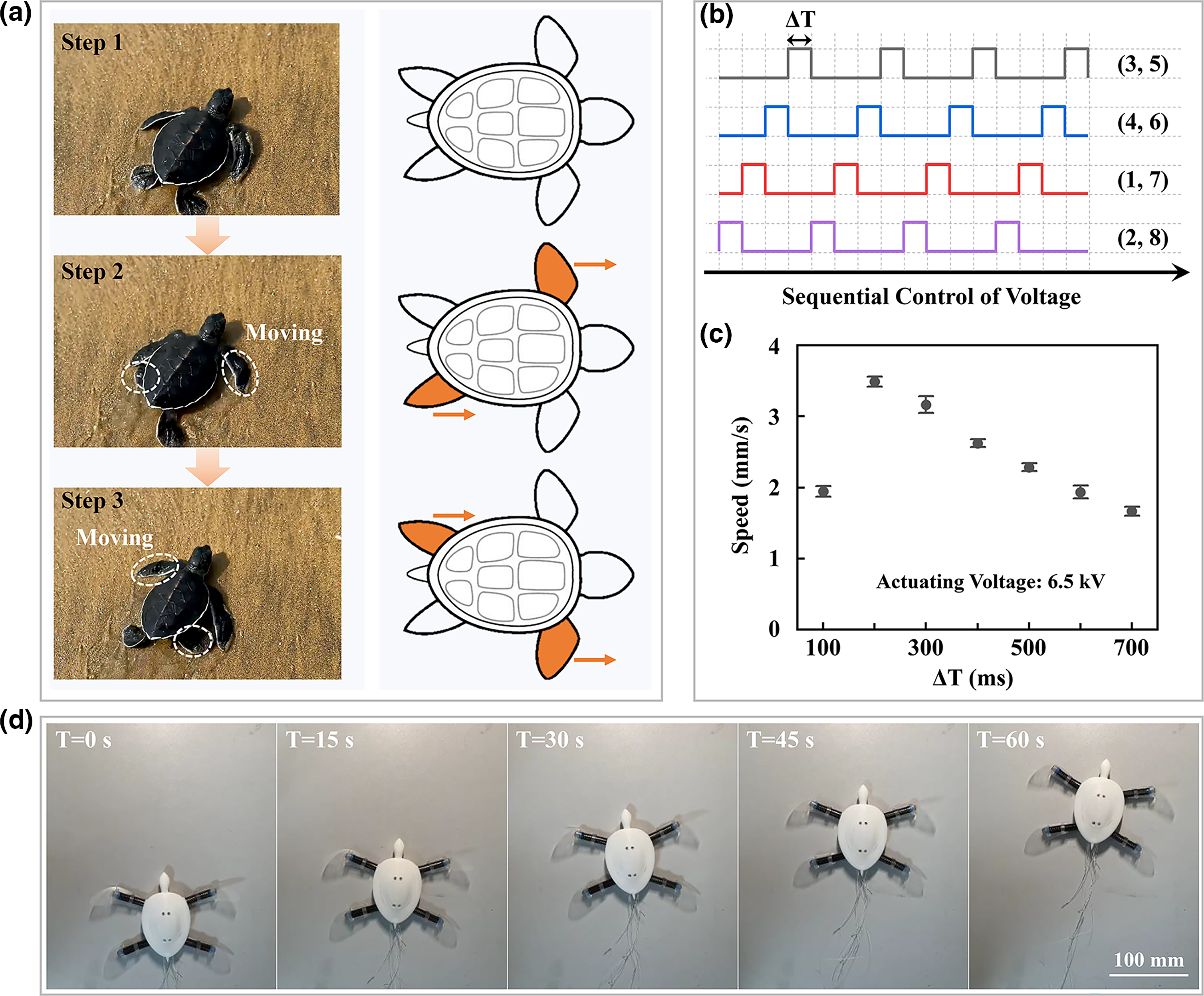
Crawling motion of the turtle robot.
Movement demonstration of the turtle robot
Finally, we set up two experimental scenarios to further test the robot’s motion flexibility and cross-media movement ability. First, we built an L-shaped swimming passage, and the width of the starting part is 21 cm, slightly higher than the width of the robot (19 cm), while the width of the lateral passage is 15 cm, which is smaller than the width of the robot body (Supplementary Fig. S3). Under normal circumstances, robots cannot enter the lateral passage through right-angle turns. However, the turtle-shaped robot we designed has omnidirectional swimming ability, enabling flexible maneuvering in narrow spaces through switching swimming modes. The experimental results were shown in Figure 6a. The turtle robot can traverse and return the L-shaped swimming passage by utilizing different motion modes. First, the robot can use forward and lateral swimming modes to cross a narrow passage to arrive at the destination location. Then, the robot can return to its original position by using the lateral swimming and backward swimming modes (Supplementary Movie S9). In addition, we built an amphibious environment to verify the robot’s ability to move across media. As shown in Figure 6b, the robot first crawled on the stone for a distance, then crossed the transition area, and achieved a swimming motion in the water (Supplementary Movie S10). To the best of our knowledge, this is the first time that the amphibious movement of a turtle-shaped robot actuated by smart materials has been achieved (Supplementary Table S1).
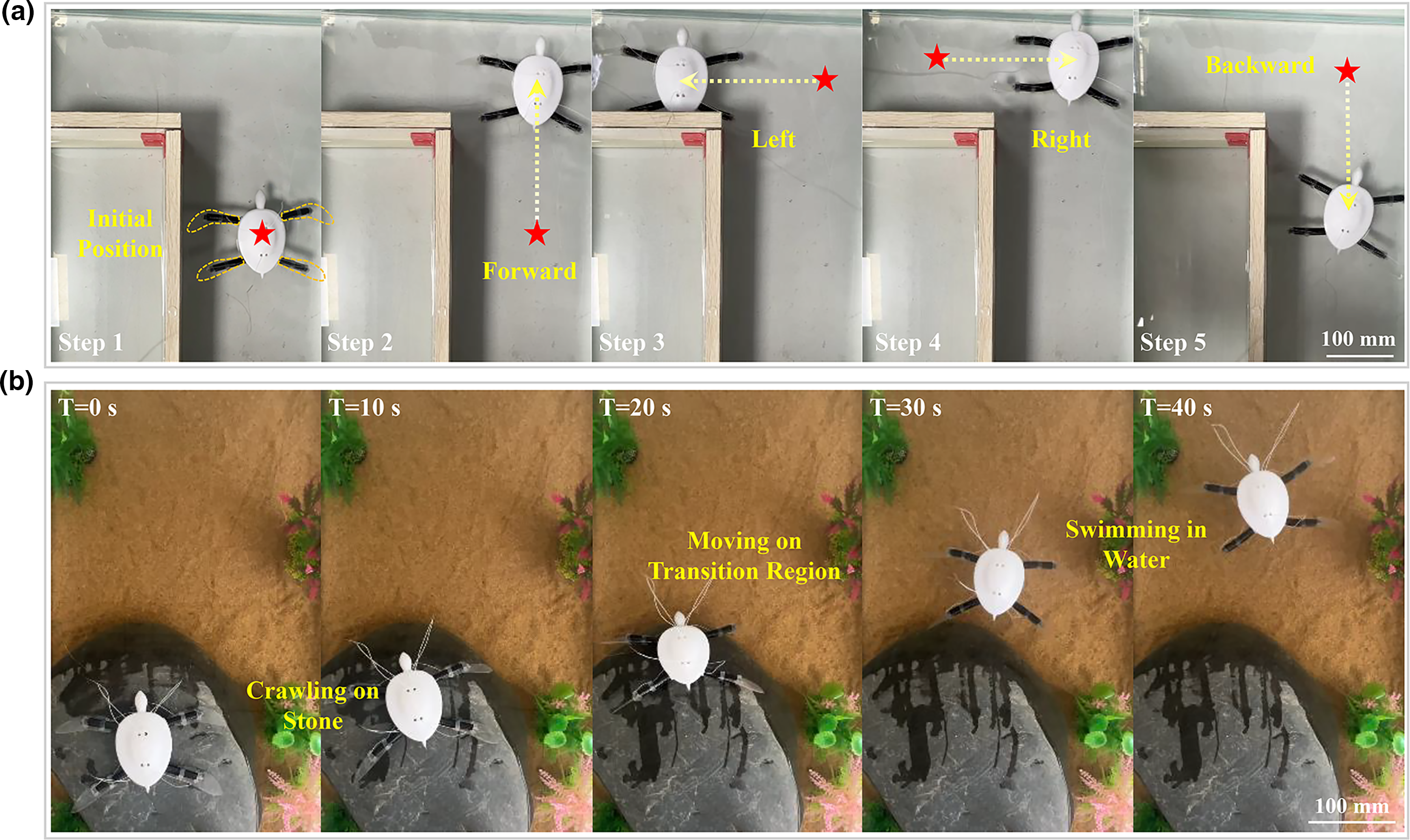
The motion demonstration of the turtle robot.
Conclusions
Inspired by the swimming and crawling locomotion of turtles, we designed a soft bionic robot actuated by multiple bionic muscles that can realize omnidirectional swimming and amphibious motion. To enhance the robot’s motion performance, a cylindrical DEA was deconstructed and redesigned. Through reconfiguring and optimizing the coupling relationship between the stiffness of the spring and the dielectric film, the actuator not only achieved a large output force and deformation but also provided relatively high stiffness to support the movement of the robot. Additionally, by mimicking the motion characteristics of the turtle, we optimized the ontology structure and control strategy of the robot, obtained the optimal inclination angle (45°) for fin flapping, and achieved omnidirectional swimming (forward and backward swimming, lateral swimming, and turning) and cross-media movement. On the whole, this amphibious soft turtle robot may be used in the future not only to explore narrow cavities but also to perform tasks such as reconnaissance and target tracking in coastal beaches, marshes, and other water–land transition areas.
Although the designed soft turtle robot successfully replicates the amphibious movements of sea turtles and demonstrates various flexible motion modes, it is powered by cables, and the motion distance is relatively short. Therefore, in future work, we will focus on two aspects to achieve the wireless controllable movement of the turtle robot, including reducing the working voltage of the actuator and developing a small high-voltage control module. The excitation voltage of the actuator will be reduced by increasing the dielectric constant of DE and optimizing the electrode material. In addition, through the designed multistage amplification circuit combined with high-voltage photodiodes, we will strive to reduce the size of the control module and achieve the output of multichannel high-voltage signals. In summary, through the advancement of material technology and engineering techniques, wirelessly controllable movement of the robot will be achieved in the future, enabling it to perform more challenging tasks.
Authors’ Contributions
YW.Z., RQ.W., Y.Z., and C.Z. conceived the concept and experimental design. YW.Z., RQ.W., LC.Y., and HS.Q. carried out the robot design and fabrication. YW.Z., RQ.W., HS.Q., and Q.Z. carried out the experiments. YW.Z., RQ.W., N.L., and C.Z. analysed the experimental data. Y.Z., LQ.L., and C.Z. directed the project. All authors Writing – review & editing the manuscript.
Footnotes
Author Disclosure Statement
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this article.
Funding Information
This work was supported by the National Key R&D Program of China (2022YFB4700100), the National Natural Science Foundation of China (62373347 and 62333021), the New Cornerstone Science Foundation through the XPLORER PRIZE, the CAS Project for Young Scientists in Basic Research (YSBR-041), the Youth Innovation Promotion Association of CAS (2023210), the Natural Science Foundation of Liaoning Province (2024JH3/10200028), the State Key Laboratory of Robotics (2024-Z04), the Fundamental Research Project of SIA (2022JC2K01 and E4391103), and the Jiang Xinsong Young Seedlings Fund of SIA.
Supplemental Material
Supplemental Material
Supplemental Material
Supplemental Material
Supplemental Material
Supplemental Material
Supplemental Material
Supplemental Material
Supplemental Material
Supplemental Material
Supplemental Material
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.