
Abstract
To test food, drug formulations, and medical devices, extensive research has focused on developing in vitro gastric simulators. Existing simulators range from rigid mechanical systems to flexible polymer-based designs, each with distinct limitations in replicating the stomach’s complex biomechanical properties. While soft pneumatic actuators provide a foundation for soft robotics-based systems, achieving biomimetic functionality requires control strategies that address both contraction motility precision and compliant interaction dynamics. In this study, we integrate admittance control with finite-time state-dependent Riccati equation (FT-SDRE) and propose a compliant and robust combined force and displacement control for a soft actuator used in robotic gastric simulator. This approach enables a more biomimetic simulation of smooth muscle in gastrointestinal (GI) system when the actuators contact the contents and can help reduce excessive stress on the soft actuator. A three-phase contact model is proposed to describe the force-deformation behavior of the actuator while interacting with the contents, followed by experimental validation. The novel admittance-controlled FT-SDRE enhances both safety and physiological realism in soft tissue interaction. Experimental validation was conducted using three objects: an irregular-shaped gelatin sample, a regular-shaped gelatin sample (same material, different geometry), and an air-filled latex balloon. Compared with nonadmittance FT-SDRE control, the admittance-controlled FT-SDRE reduced 11.19% to 38.46% average contact force according to different objects. Across all tests, the time spent above a force threshold was reduced by 35–39%, which highlights the potential of the proposed method to improve safety, adaptability, and biomimicry in next-generation in vitro gastric simulation platforms.
Introduction
In vitro gastrointestinal (GI) simulators biomimetically replicate the human digestive environment and have become important tools for studying the digestion of test substances and their links to disease. 1 They are widely used for early-stage evaluation of food,2,3 drug formulations, 4 and medical devices, allowing researchers to evaluate product performance and safety before proceeding to animal or clinical studies. 5 By replicating key characteristics of the gastric environment, such as peristalsis, GI simulators help reduce both costs and ethical concerns associated with in vivo testing. 6 The effectiveness of these simulators largely depends on their ability to accurately reproduce the mechanical behavior of gastric tissues, particularly the rhythmic contractions generated by the stomach’s muscular architecture.
The stomach wall has several layers, with circular smooth muscles in the middle that create radial contractions for peristaltic movement. 7 To more realistically mimic the compliance and biomechanical properties of GI tissues, soft materials have been introduced into simulator design.8,9 One major goal of soft-robotic GI systems is to reproduce peristaltic motion by actively controlling the actuators. Various actuation mechanisms have been explored, including rope-driven, 10 roller-driven, 11 and pneumatic-based designs,9,12 most of which rely on open-loop control strategies. Among these approaches, pneumatic-based designs are particularly attractive because they can be easily configured into circumferential chamber geometries that generate radial forces similar to those produced by circular smooth muscle fibers in the stomach wall. More advanced systems adapt closed-loop control to better simulate both normal and pathological gastric activities. However, these systems focus only on displacement feedback.13,14 Research on combined control involving both force and displacement remains limited. 15 Incorporating force sensors could better capture gastric motility, particularly the smooth muscle wall’s response to content contact.
Inspired by the inherent force–displacement coupling of biological smooth muscle, various engineering control strategies can be adapted to enhance robotic gastric simulators. Combined force–displacement control has been widely discussed across engineering fields to regulate the systems’ mechanical response and dynamic behavior. It can be broadly categorized into passive strategies,16,17 implemented through structural design, and active strategies, 18 based on continuous force feedback. The fundamental approaches of compliance control can be systematically categorized into hybrid force/position control,19,20 which divides the task space into orthogonal spaces assigned separately to force and position control; parallel force/position control,21,22 which superimposes force and position commands to improve robustness against model uncertainties and environmental changes; impedance control, 23 which establishes a target dynamic relationship between force and motion without explicitly tracking either trajectory; and admittance control, 24 which modifies the system’s motion based on measured external forces, facilitating compliant interaction with varying environments.
The biological stomach exhibits adaptive mechanical compliance through complex multilevel regulation that current robotic simulators fail to replicate. Gastric motility is influenced by neural control (vagal and enteric nervous systems), hormonal signals (gastrin, motilin, somatostatin), mechanical feedback from stretch receptors, feeding state, and pathological conditions. Among these factors, the transition between fasting and feeding states represents the most fundamental change in gastric mechanical behavior for engineering implementation. 25 During fasting, the distal stomach generates migrating motor complexes with strong periodic contractions for residual clearance.26,27 Upon feeding, the stomach transitions from the strong, propagating contractions of the fasting state to a storage and mixing mode 28 : The fundus undergoes receptive relaxation to accommodate ingested material, and the antrum generates lower-amplitude peristaltic waves for controlled grinding and emptying.29,30 In this postprandial state, the goal of the motor pattern is not to maximize contraction amplitude but to transport and mix luminal contents while avoiding excessive mechanical loading of the gastric wall. By analogy, a gastric simulator should therefore not only reproduce the kinematic pattern of contractions but also limit the average and peak contact forces during interaction to reduce mechanical stress on the soft actuators themselves. Conventional displacement controllers, however, track a prescribed trajectory irrespective of the reaction force and thus cannot adapt their apparent stiffness when resistance increases, which motivates the hybrid force–displacement strategy adopted in this work.
While admittance control 24 has proven successful in industrial human–robot interaction, 31 its application to soft pneumatic systems remains limited, particularly for biomedical applications requiring compliant tissue interaction. Such applications, including the testing of intragastric balloons (IGBs), 32 demand safety through compliance in force/displacement control. To enable safe and responsive physical interaction with biological environments, actuators should exhibit compliant behavior when subjected to external contact forces while sustaining functional motion patterns within the required time frames. This requires adaptive modulation of actuation states upon contact with internal materials while maintaining peristaltic-like motion patterns despite system uncertainties.
Finite-time control of nonlinear systems has been extensively studied using Lyapunov-based designs such as sliding-mode, backstepping, and adaptive schemes. These methods can guarantee fast convergence in the presence of uncertainties and disturbances and have been successfully applied to autonomous surface vehicle, 33 switched systems, 34 and general nonlinear plants under full-state constraints or unmodelled dynamics. 35 However, sliding-mode and terminal sliding-mode controllers often suffer from chattering and require careful filtering to avoid excessive control effort, while strict-feedback backstepping designs may become cumbersome for high-order, strongly coupled, or distributed-parameter systems such as soft-robotic actuators. In addition, many finite-time schemes are not explicitly optimal with respect to a performance index and do not naturally incorporate finite-horizon objectives.
As an alternative, the state-dependent Riccati equation (SDRE) is suitable for nonlinear dynamics by casting them into a state-dependent coefficient form and solving a Riccati equation online.36,37 SDRE-based controllers have been successfully implemented in robotics, mobile navigation, and continuum manipulators that require compliant interaction with uncertain environments.38,39 Finite-time SDRE or state-dependent differential Riccati equation (SDDRE) formulations have been proposed to enforce prescribed transient behavior within a fixed time interval while retaining the advantages of optimal control.40,41 Compared with sliding-mode, backstepping, or model-predictive controllers, FT-SDRE can offer a continuous feedback structure that avoids induced stress in soft pneumatic systems, explicit encoding of finite-time tracking and force regulation goals in a quadratic cost, and sufficient flexibility to accommodate state-dependent stiffness and damping needed to emulate adaptive compliance.
This study integrates admittance control with FT-SDRE control,42,43 creating a hybrid framework for artificial smooth muscle actuators. This work contributes a novel two-layer control architecture that combines FT-SDRE for nonlinear optimal tracking with admittance-based compliance adaptation, enabling simultaneous force regulation and trajectory control within finite time horizons. We establish a complete modeling framework for ring-shaped artificial smooth muscle systems that incorporates contact dynamics through a calibrated three-phase deformation-forces contact model. Experimental validation with soft objects of varying elasticity demonstrates significantly reduced contact forces and enhanced compliance, effectively mimicking physiological gastric motility while protecting against actuator damage.
Hybrid Control of the Smooth-Muscle-Inspired Actuator
To address the challenges mentioned before, a hybrid control architecture is proposed in this section that integrates an outer-loop admittance controller with an inner-loop FT-SDRE controller and describes the corresponding system setup used for simulation calibration and experimental validation. The admittance layer interprets contact forces as compliant motion references, while the inner loop ensures finite-time convergence to these references under nonlinear dynamics and actuation constraints.
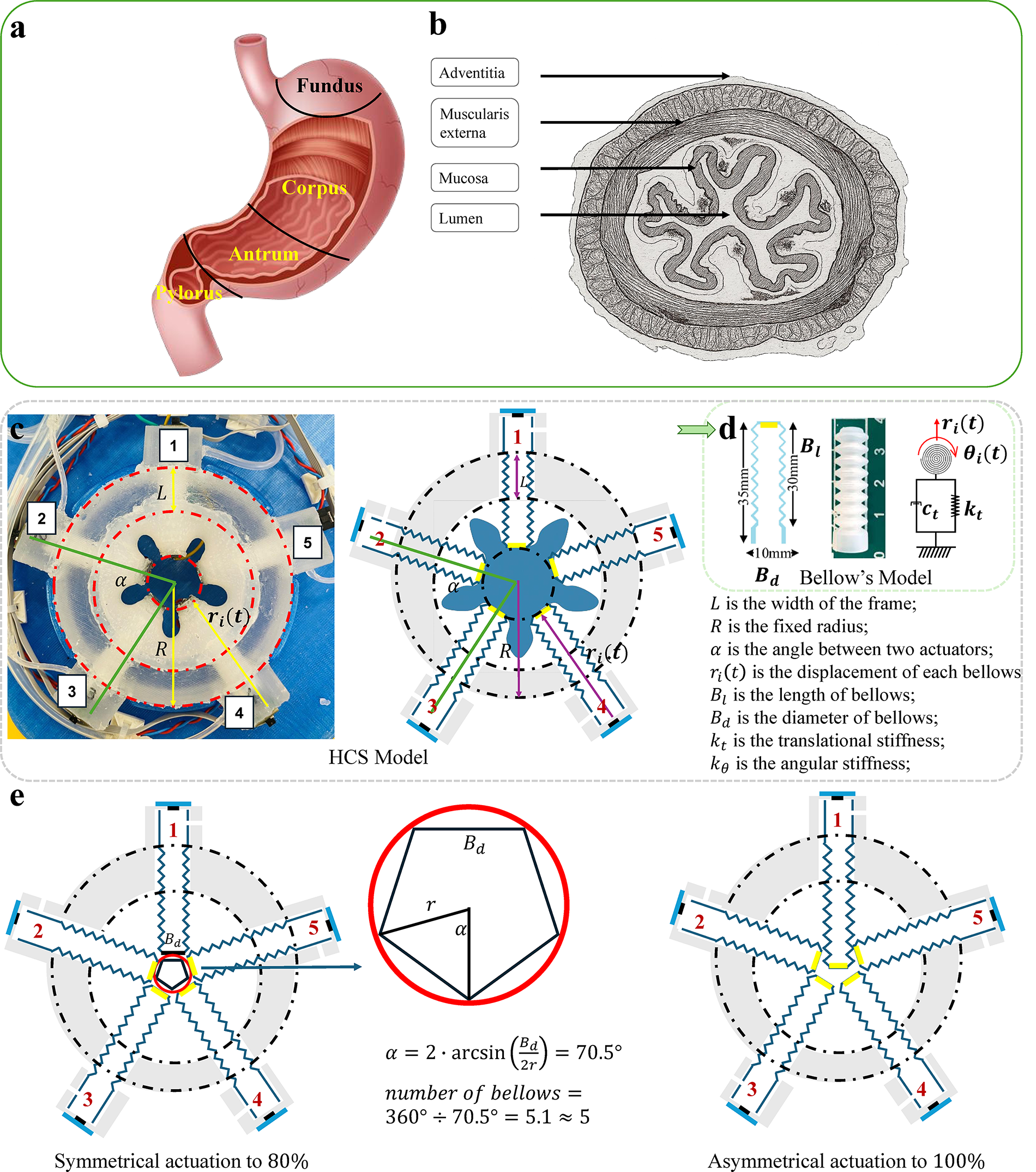
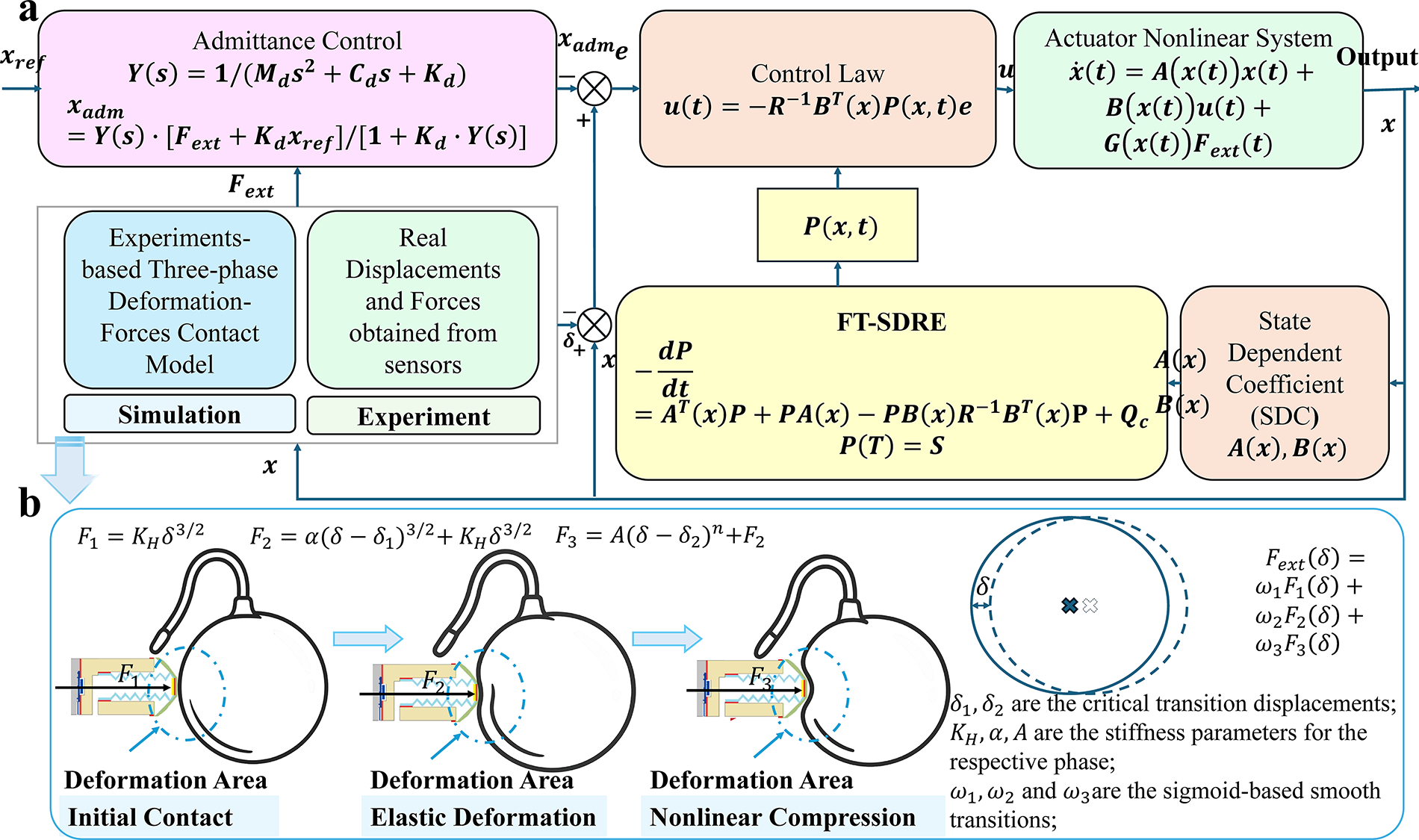
Figures 1 and 2 present the overview of this integrated control framework. Figure 1a and b presents the anatomical structure of the stomach and its cross-sectional view. Figure 1c and d introduces the mechanical structure and actuation layout of the smooth-muscle inspired actuator, which is a segment of the robotic gastric simulator.9,14 Figure 2a illustrates the closed-loop control structure, showing how admittance control, FT-SDRE, and both simulated and experimental feedback signals are integrated. Figure 2b describes the three-phase contact model. This section elaborates on the mathematical formulation of the proposed control framework, where we build a three-phase force-deformation model, introduce the system dynamics that incorporate external disturbances, and discuss the construction of the admittance control and the FT-SDRE control. These formulations provide the theoretical foundation for the implementation and validation illustrated in subsequent sections.
Stomach structure and bioinspired actuator design:
Control strategy and contact model:
Smooth-muscle-inspired actuator
Replicating the stomach’s spatially varying contraction patterns requires artificial actuators capable of generating coordinated deformation fields. Our smooth-muscle-inspired actuator shown in Figure 1 was designed to recreate the radial compression of the antrum by using five pneumatic bellows enclosed in a polydimethylsiloxane frame and covered by a soft layer (Ecoflex 0030).9,14 As shown in Figure 1a, the whole human stomach comprises regions including the fundus, corpus, antrum, and pylorus, with the antrum region generating the strongest contraction responsible for grinding and propelling food contents. Figure 1b illustrates the cross-sectional structure of the stomach, consisting of four main layers from outside to inside: adventitia, muscularis externa, mucosa, and lumen, 44 which the actuator precisely mimics. Figure 1c presents the design of the actuator, defined as actuated hollow circular sectors (HCSs), fully discussed in Appendix A1. The central opening corresponds to the lumen; the mucosa is simulated by a 1 mm-thick soft layer made of Ecoflex 0030 and Slacker mixture. According to Case et al.’s research, 45 this material exhibits viscoelastic properties that can be accurately described using mass-spring-damper (MSD) model (shown in Fig. 1d), thereby enabling the establishment of ordinary differential equation-based dynamics models and facilitating the implementation of advanced control algorithms. The muscularis externa is simulated by five bellows. Since the antrum region achieves the greatest degree of contraction, the actuator is designed based on the parameters of the antrum as the representative segment. The Polydimethylsiloxane (PDMS) (Sylgard) frame provides necessary structural rigidity and optical transparency. With these characteristics, the smooth-muscle-inspired actuator can achieve the peristalsis as one segment of stomach, with folds formed during contraction naturally recreating the gastric folds characteristic of stomach physiology.
The number of bellows is calculated based on geometric constraints as illustrated in Figure 1e. For 80% symmetrical occlusion, the contracted diameter

Each bellow’s base diameter

For asymmetrical occlusion, the five bellows do not contract uniformly. Instead, four bellows contract to 80% occlusion (20.8 mm displacement each), while one bellow extends further to achieve complete closure. This configuration enables 100% occlusion. The asymmetrical approach is more representative of biological stomach contractions, where the antral contraction wave does not always propagate symmetrically.
Building upon the actuator, an admitted time-dependent dynamic model is applied. The mechanical behavior of these sectors is characterized through a distributed spring-damper framework that captures two fundamental deformation modes. Radial expansion and contraction are quantified by the displacement coordinate
Three-phase contact model of deformation and force
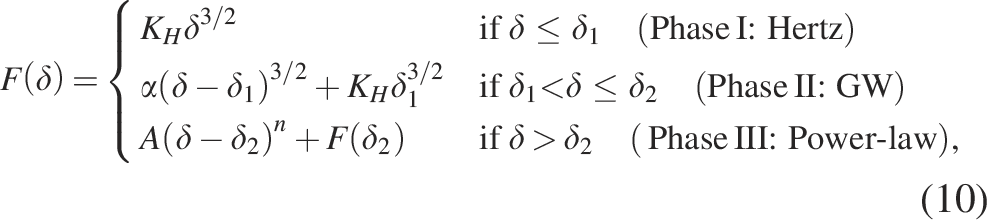
After establishing the actuator model, its dynamic response during contact with internal media is characterized by analyzing a single representative bellow-content interface using the HCS configuration’s geometric symmetry to reveal fundamental contact mechanisms. The interaction between the artificial smooth muscle and the simulated stomach contents cannot be captured by a single contact model because contact behavior transitions from point contact to area contact as deformation increases, material properties change with strain level, and viscous effects become significant under dynamic loading. We first divide the contact process into three distinct mechanical phases as shown in Figure 2b, including Hertz elastic contact, Greenwood–Williamson (GW) contact, and nonlinear compression. The Hertz model 46 is an elastic contact model, suitable for small deformations, which is applied to describe the initial contact (Phase I). As the deformation continues to develop, the Greenwood–Williamson model 47 is introduced as Phase II to characterize the contact process on a micro scale. For large deformation (Phase III), a generalized power-law model can be employed. The experiment-based three-phase contact model is obtained through parameter identification from experimental data, featuring automatic phase transitions via local stiffness analysis and smooth sigmoid interpolation for mathematical continuity.
The original Hertz model is illustrated as follows:


The original GW model is described as follows:

Using the transformation


The simplified GW model (Phase II) is shown as follows:

The power-law model for Phase III is as follows:

After analyzing the three phases of the contact process, the integrated three-phase deformation-force contact model is defined as follows:
To ensure mathematical differentiability, we introduce a smooth version using sigmoid transition functions





The phase-specific force functions
For Phase I data (

For Phase II data (

For Phase III data, first, the logarithmic transformation is applied,

The parameter estimation becomes:

The complete parameter vector

Admittance-controlled FT-SDRE
The main control theory applied to the smooth-muscle-inspired actuator is admittance-controlled FT-SDRE, as shown in Figure 2a, which combines the FT-SDRE control with the admittance control. The admittance control is the outer loop, which is modeled as a virtual MSD system, governed by

We develop a disturbance-aware model for the actuator, integrating external force feedback within the closed-loop control architecture. By introducing the disturbance of the external force, the system dynamics can be expressed as follows:

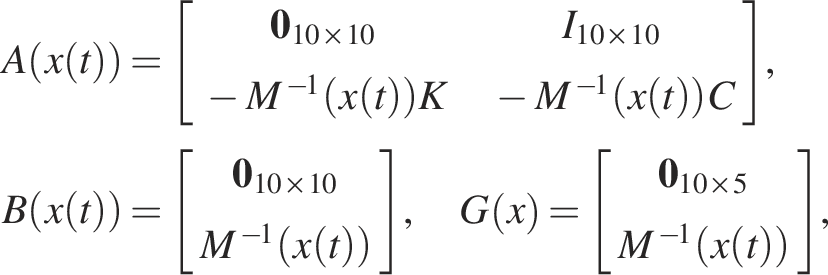
The system matrices are defined as follows:
And

To address the nonlinear dynamics of the actuator system over a finite time horizon, the admittance-controlled FT-SDRE control strategy is employed. This approach applies a time-varying, state-dependent feedback gain matrix that optimally balances state-tracking accuracy and control effort; the external force is calculated as disturbance as illustrated before.
The corresponding performance index incorporates the tracking error with respect to the admittance-modified trajectory, the tracking error is



Applying the necessary condition for optimal

Considering the tracking objective, the control law is calculated by



To compute

The solution to the coupled system can be expressed using the state transition matrix:

The matrix

The weighting matrices
This formulation enables a nonlinear, time-varying feedback gain that enhances both compliance and tracking in the smooth-muscle-inspired actuator control, making it suitable for mimicking gastric motility with adaptive force regulation. The admittance model acts as a high-level trajectory modifier, feeding
Experimental setups
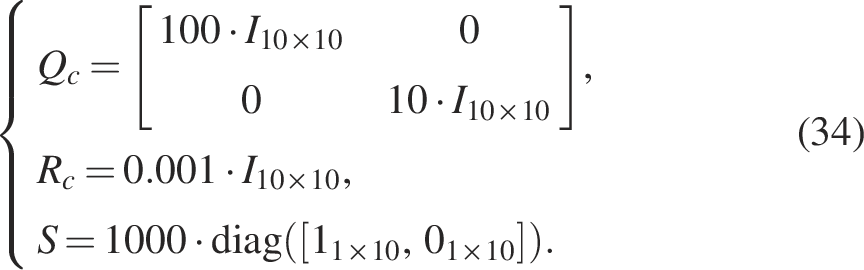
This section presents the experimental setup for both three-phase model calibration and experiments. The smooth-muscle-inspired actuator system is shown in Figure 3. The whole system includes the actuation system, the sensing system, and the control interface consisting of a microcontroller and multiplexer. The actuation system is composed of an air compressor and a vacuum pump, which generate positive and negative pressure, respectively. These are connected to pressure (IVT0030-3BS)/vacuum (IVT0090-3UBS) generators and controlled via miniature solenoid valves (B005E1-J3-PS), which act as pneumatic switches to direct airflow to each bellow of actuator. We applied both proximity and force sensors to detect displacements and contact forces during deformation of each bellow, which provides real-time feedback signals essential for closed-loop control. This integrated setup enables simultaneous actuation, sensing, and control, allowing for dynamic testing under various control conditions. With respect to the control implementation, during initialization, MATLAB configures the I/O interfaces, I2C protocol, serial communication (115200 baud, 2 s timeout), and sensor hardware. The system then continuously acquires sensor data through Arduino and processes it via three modules: data logging, setpoint generation, and dual-loop control (inner FT-SDRE for pressure, outer admittance for force position). Control commands are sent back to Arduino for pneumatic actuation.
Experimental configuration for smooth-muscle-inspired actuator system testing
The real-time computational performance of the proposed control framework is evaluated during experiments. In the current implementation, five bellows are controlled independently, resulting in five state-dependent Riccati solves per cycle. For the FT-SDRE controller without admittance, the average control cycle time is 54.53 ms, corresponding to an effective control frequency of 18.34 Hz. For admittance-controlled FT-SDRE, the average cycle time increased to 55.82 ms, with a frequency of 17.92 Hz. The Riccati computation constitutes only a small part of the overall cycle time, with average contributions of 4.82 ms (8.8%) and 6.18 ms (11.1%) for the without admittance and with admittance cases, respectively. These results indicate that the closed-loop solving rate is primarily constrained by communication and auxiliary computations rather than by the FT-SDRE formulation itself, supporting the suitability of the proposed framework for real-time soft-robotic actuation with multiple degrees of freedom.
Simulation and Experimental Validation of Smooth-Muscle-Inspired Actuators
This section validates the admittance-controlled FT-SDRE framework through simulation and experiments with objects of varying elasticity. The results demonstrate the controller’s compliance, stability, and suitability for biomedical applications involving GI interactions with food, drug, and implant.
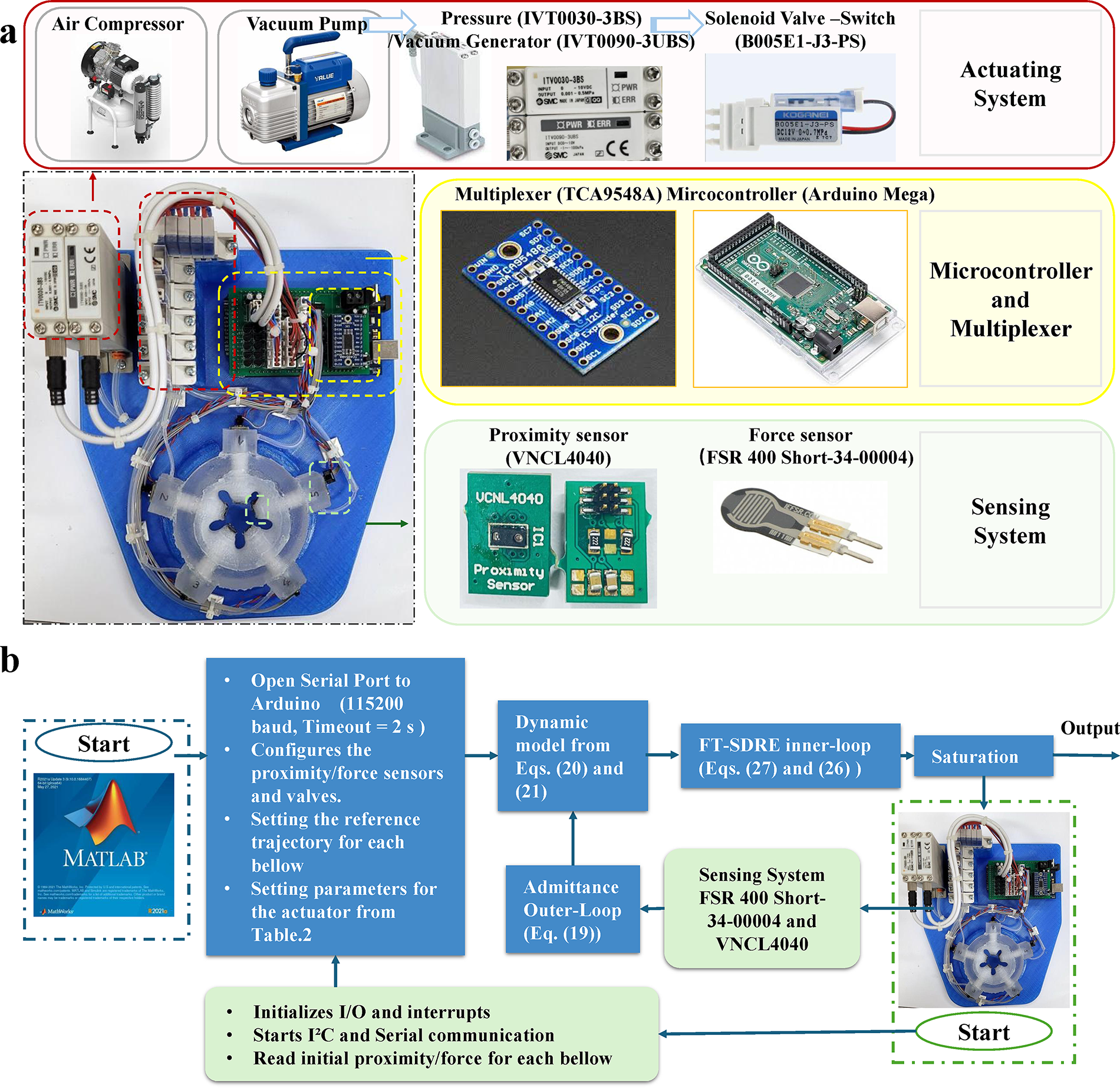
Three test samples with different geometries and mechanical properties (Fig. 4) were used to evaluate the robustness of the control system and the proposed contact model. Object 1 (Fig. 4a) is an irregular-shaped gelatin sample (maximum dimension 21.3 mm), introducing geometric asymmetry and nonuniform contact to mimic the uneven curvature and local stress concentrations typical of solid food boluses. Object 2 (Fig. 4b) is a regular circular gelatin sample (diameter 22.5 mm) made from the same material, providing a symmetric and repeatable baseline with predictable force–displacement behavior. Object 3 (Fig. 4c) is an air-filled latex balloon (natural rubber, diameter 34.3 mm), representing a highly compliant pneumatic structure with nonlinear stiffness and possible buckling, analogous to gas or semifluid gastric contents and inflatable devices such as IGBs. Together, these samples cover solid viscoelastic to compliant pneumatic structures, allowing us to assess both the geometric sensitivity and robustness of the control system, as well as the accuracy of the three-phase contact model across different force levels and deformation regimes.
Test objects with measured dimensions:
Three-phase contact model calibration and simulation with experimental comparison
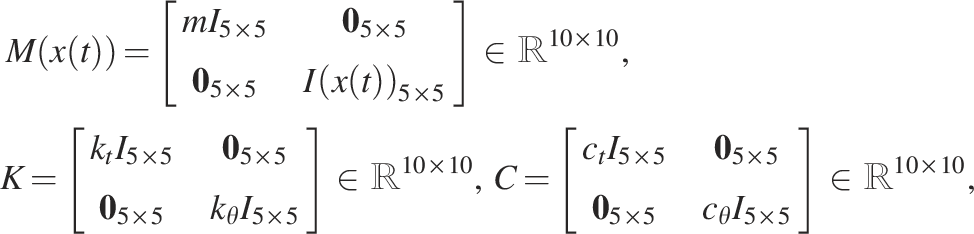
We extracted displacement and force data from compression experiments using the smooth-muscle-inspired actuator for model calibration. The model calibration ensures accurate capture of real-world contact responses, which is essential for simulation, validating the control framework with the initial gain tuning specified in Equation 34. The calibration process was carried out through simultaneous multibellow compression experiments using the same smooth-muscle-inspired ring actuator and instrumentation setup as employed in the main experiments. This configuration ensured that the identified parameters faithfully reflected the true actuator–object interaction under identical mechanical boundary conditions, actuation scheme, and sensing configuration. During each calibration, all five bellows were driven synchronously to compress the test objects under a low-frequency sinusoidal radial trajectory, replicating the quasi-static contact conditions of the main experiments. The calibration experiments were specifically designed to ensure the reliability and physical validity of the experimental force–displacement data used for model fitting. Because all five bellows were actuated synchronously under loading conditions, the contact forces and displacements were recorded simultaneously across five parallel channels, providing inherently repeated measurements at each time instant. This simultaneous multibellow approach effectively served as statistical replication within a single experiment, ensuring that the averaged response was representative of the actuator’s overall mechanical behavior rather than that of an individual bellow.
During calibration experiments, Object 3 (the air-filled balloon) exhibited several characteristics that prevented reliable model fitting: (1) highly nonlinear force–displacement response with multiple inflection points due to buckling, (2) significant hysteresis between loading and unloading cycles, and (3) poor repeatability across tests due to air redistribution within the balloon. These pneumatic effects cannot be adequately captured by the proposed three-phase model. Therefore, quantitative analysis focused on Objects 1 and 2, which demonstrated consistent and repeatable mechanical responses (see Appendix A2 for a detailed discussion of Object 3).
To verify that the three-phase deformation-forces contact model has well-performed fitted results, we compare it with linear fitting method, power-law fitting method, and piecewise-linear fitting method. For quantitative assessment of fitting effectiveness across these different approaches, the coefficient of determination
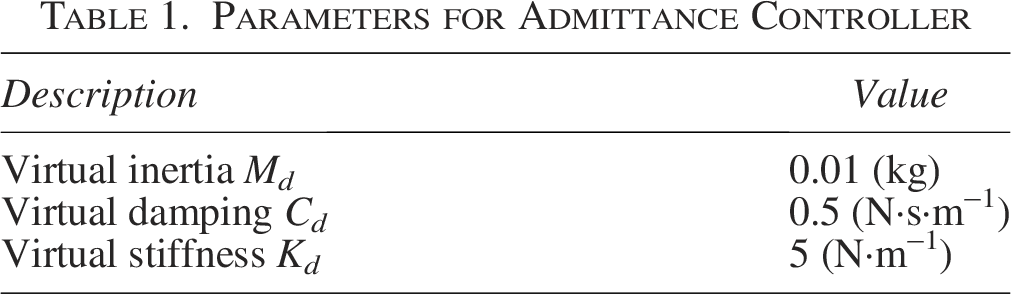
After the calibration of the three-phase deformation-forces contact models, we carried out the simulation experiments based on the parameters illustrated in Tables 1 and 2, which were also applied in the experiments. The parameters for admittance control are selected to ensure a light, well-damped virtual compliance, first obtained from this second-order design guideline and then adjusted through simulation and a small number of experiments.
Parameters for Admittance Controller
Parameters for the Smooth-Muscle-Inspired Actuator 14
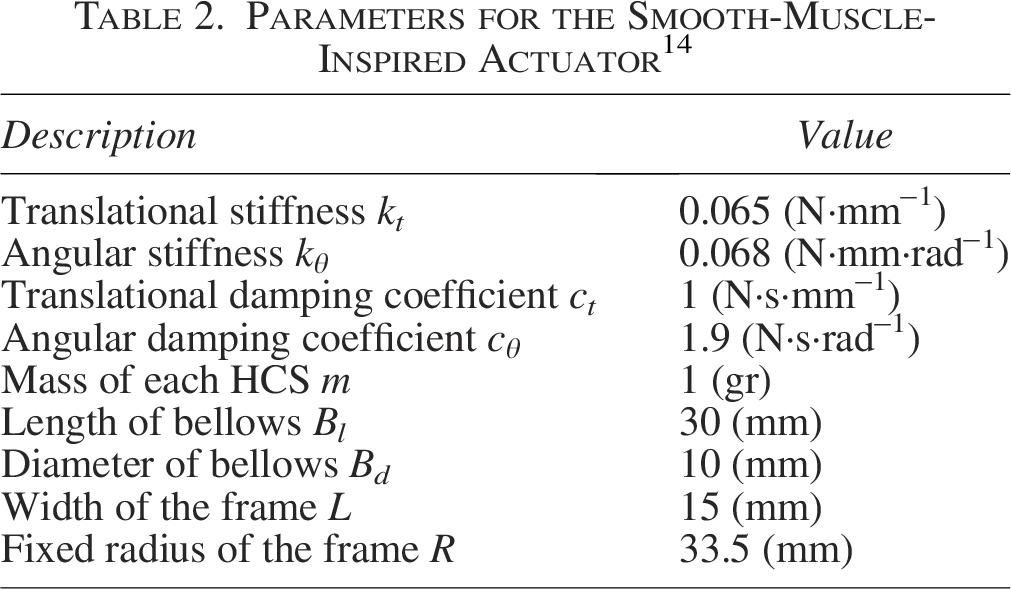
Figure 5 presents the calibration and simulation results for Object 1 (gelatin products with irregular shape). Figure 5a compares the experimentally measured force–displacement response of Object 1 with four different fitting models. The experimental curve exhibits three distinct regions. First, there is an initially compliant and nonlinear region, followed by a quasi-linear intermediate region and a pronounced stiffening behavior at larger compressions. The linear model cannot reproduce either the initial compliance or the final stiffening and therefore systematically underestimates the force at small and large displacements. The power-law model captures part of the nonlinearity but fails to represent the change in slope between the intermediate and high-compression regimes. The piecewise linear model improves the fit locally but still cannot capture the smooth transitions between regions. In contrast, the three-phase model closely follows the experimental results across the entire compression range, reproducing both the locations and the slopes of the three regions, with visible discrepancies only at small local fluctuations that are likely due to experimental noise rather than systematic model error. The calibrated parameters for Object 1 are: Phase I (Hertz),
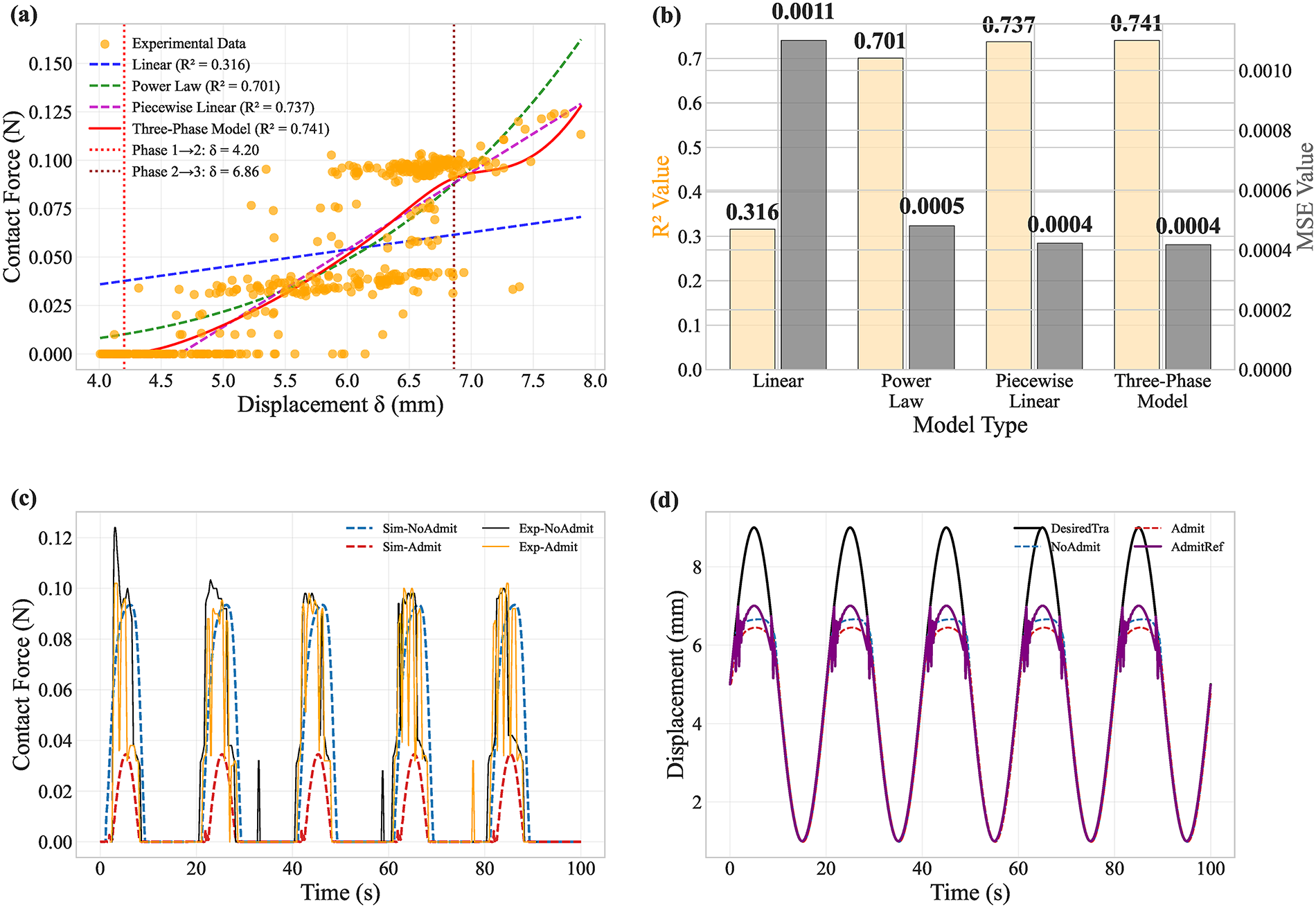
Summary of experimental calibration and simulation validation results using the calibrated three-phase deformation-force contact model for Object 1 (irregular-shaped gelatin product, subfigures);
Figure 5c shows the contact force under four conditions: simulation without admittance control, simulation with admittance control, experiment without admittance control, and experiment with admittance control. For the cases without admittance control, the experimental and simulated force profiles exhibit very similar behavior: Both the overall magnitude of the contact force and the detailed evolution over time (including the rise, peak, and decay phases) are closely matched. When admittance control is activated, both the simulation and the experiment show a clear reduction in peak contact force, and the temporal evolution of the experimental force closely follows the simulated admittance-controlled trajectory. In particular, the experimentally measured force under admittance control tends to decrease toward the level predicted by the simulation, demonstrating that the controller and the contact model cooperate to achieve the intended virtual compliance. The remaining inconsistencies are mainly reflected as oscillations and deviations around the simulated curve, which can be attributed to unmodelled effects such as valve and tubing dynamics, friction and hysteresis in the soft chambers, sensor noise, and the finite update rate and saturation limits of the real controller. The overall agreement between experimental and simulated forces, in both the without admittance and with admittance cases, provides further validation that the proposed three-phase model captures the dominant contact mechanics under closed-loop admittance control.
Figure 5d shows the corresponding radial displacement responses. In the case without admittance control, the actuator follows the desired radial displacement trajectory rigidly. When admittance control is enabled, the commanded motion is adaptively modified in response to the measured interaction force, effectively introducing a virtual compliance. This demonstrates that the admittance controller successfully trades a small amount of trajectory aggressiveness for a reduction in contact force, thereby improving the compliance of the interaction.
Similarly, Figure 6 summarizes the calibration of the three-phase contact model for Object 2 (Gelatin products with regular shape) and the results of the corresponding simulations (Compared contact force with experiments). Figure 6a shows the fitted relationship between measured compression
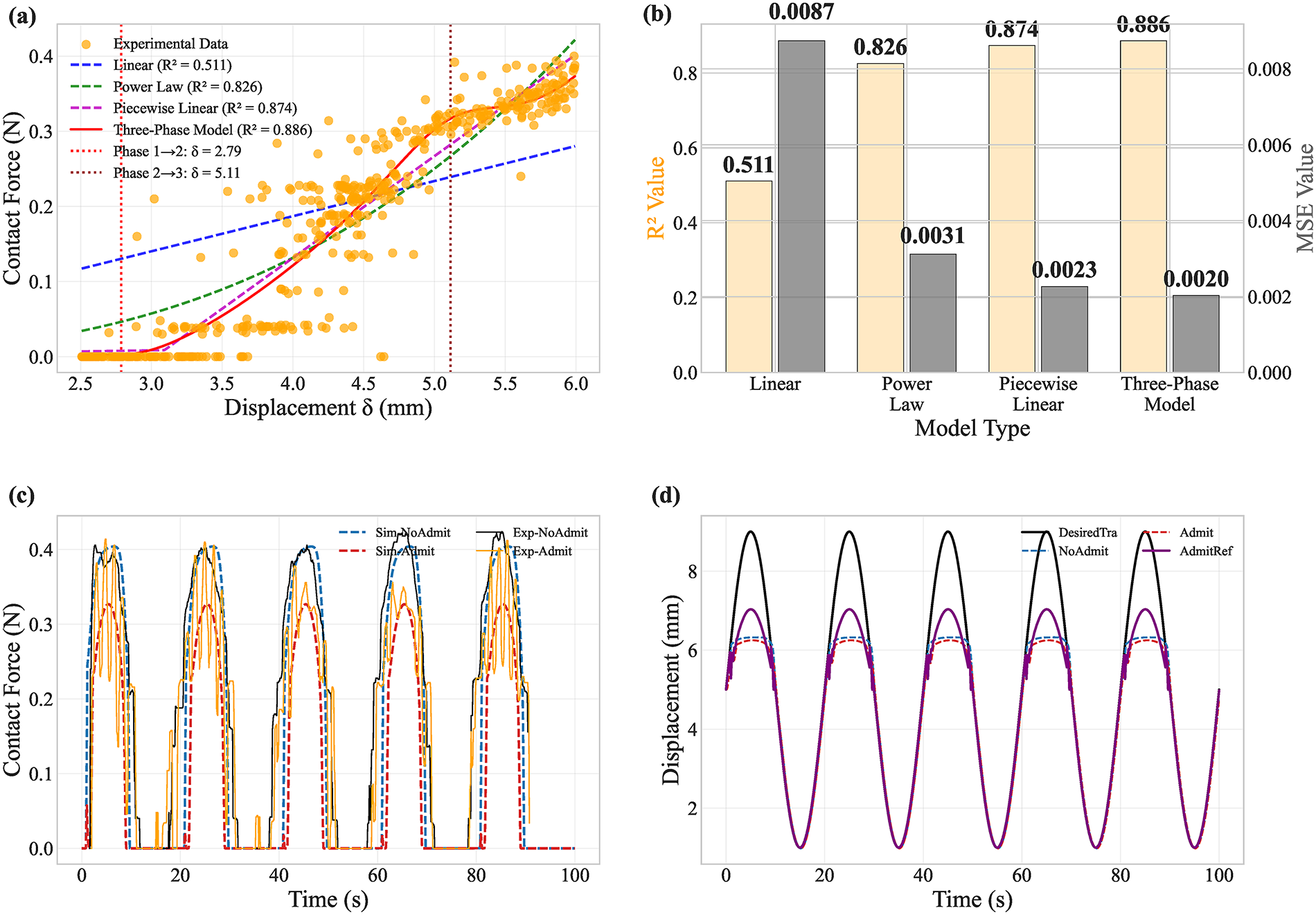
Summary of experimental calibration and simulation validation results using the calibrated three-phase deformation-force contact model for Object 2 (regular-shaped gelatin product);
Figure 6c presents the virtual contact force profiles generated by the model, together with the corresponding experimental measurements. In the condition without admittance control, the simulated and experimental contact forces are almost the same in both magnitude and temporal evolution, indicating that the three-phase contact model accurately reproduces the baseline interaction behavior under displacement control. When admittance control is enabled, the experimental contact force exhibits an oscillatory pattern that remains tightly clustered around the corresponding admittance-controlled simulation, rather than diverging from it. This behavior is consistent with the expected action of the FT-SDRE controller: Once the actuator first impacts the object, a large contact force is generated; the controller then rapidly reduces the chamber pressure, causing the bellow to retract and the contact force to drop; as the finite-time law drives the actuator back toward the desired trajectory, the bellow re-approaches the object and generates a sequence of decaying force peaks. This close agreement between experiment and simulation confirms both the correctness of the three-phase contact model and the effectiveness of the FT-SDRE admittance controller in limiting peak contact forces while preserving finite-time convergence of the actuator–object interaction.
Figure 6d shows the radial displacement over time, including the reference sinusoidal trajectory and the responses with and without admittance control. In both cases, the actuator cannot fully reach the reference trajectory because the internal object limits the motion, but without admittance control, this leads to large contact forces as discussed above. With admittance control, the reduction in trajectory amplitude is modest, yet the resulting decrease in contact force is obvious.
Experimental results
To validate the proposed modeling and control framework under realistic interaction conditions, the actuator was experimentally evaluated for elastic object interaction, with system performance assessed via bellow displacement, pressure input, and contact force measurements.
Figures 7–8 illustrate the experimental results of the designed actuator interacting with the three elastic objects: the irregular gelatin product (Object 1), the regular gelatin product (Object 2), and the air-filled latex balloon (Object 3).
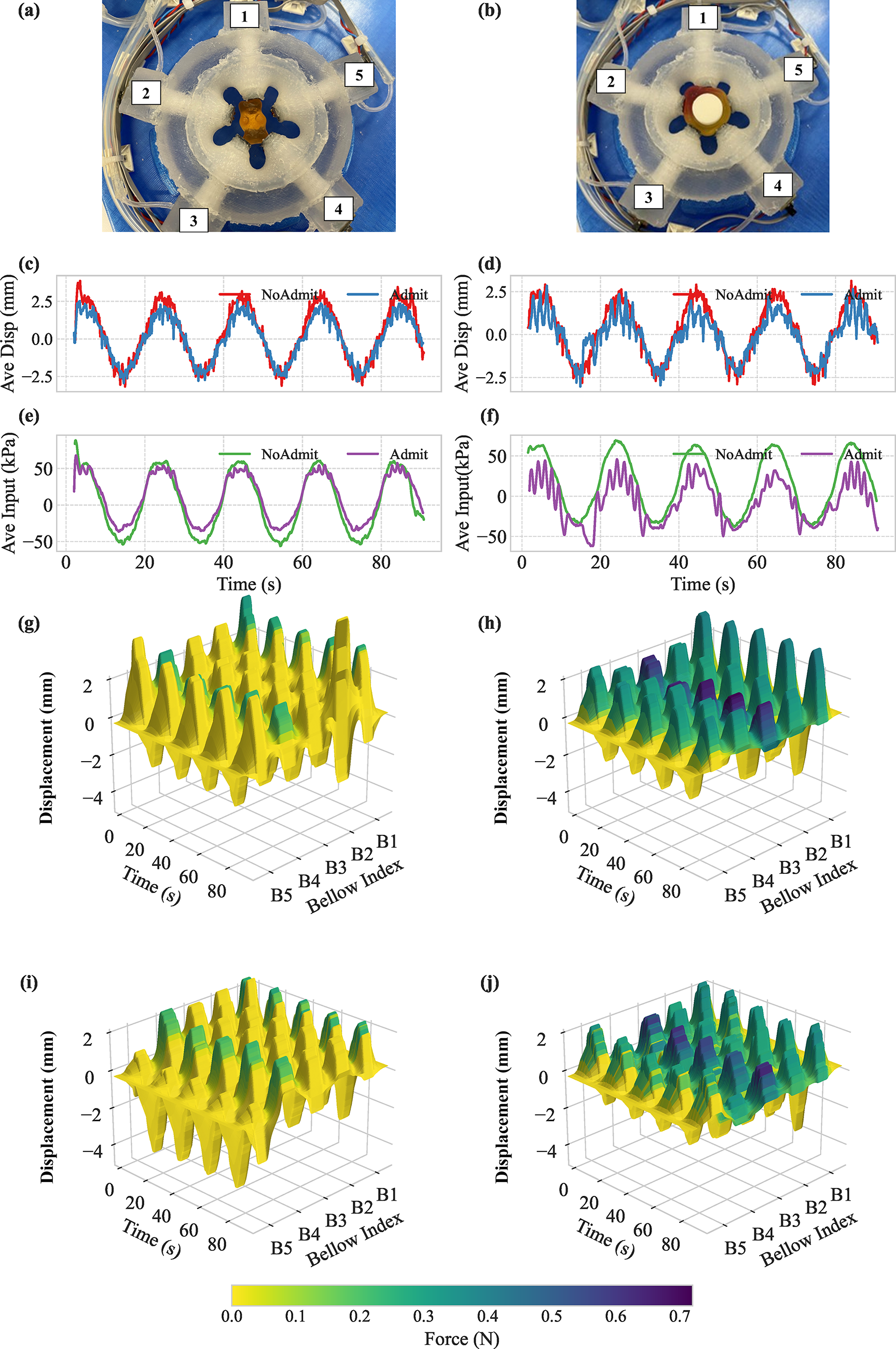
Experimental performance evaluation and characterization analysis of smooth-muscle-inspired actuator with Objects 1 and 2.
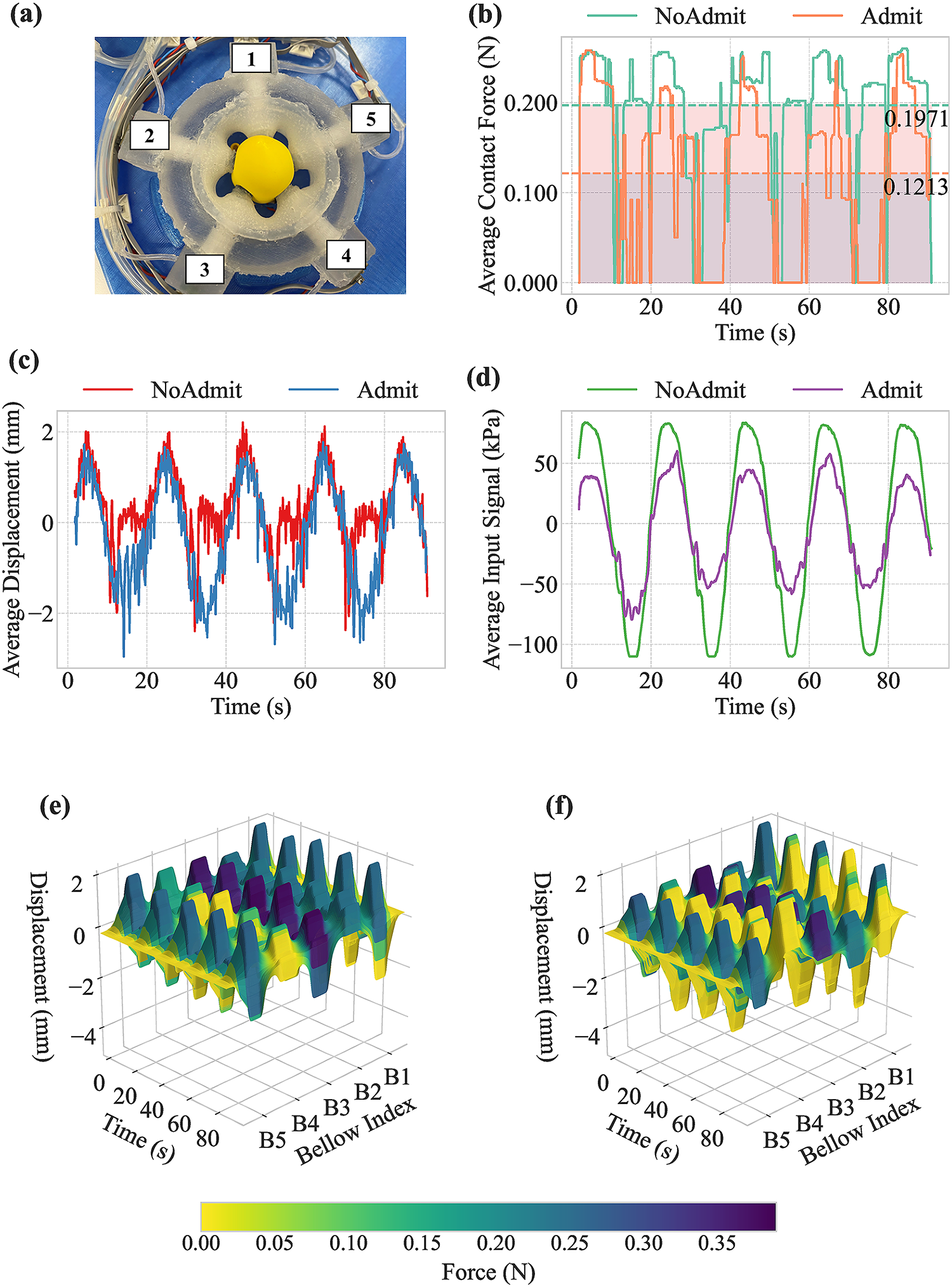
Experimental performance evaluation and characterization analysis of smooth-muscle-inspired actuator with Object 3 (air-filled latex balloon).
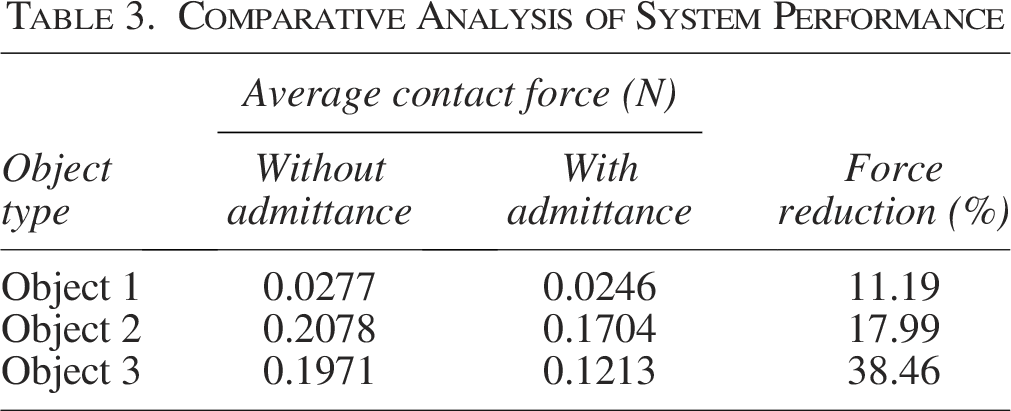
The detailed contact-force trajectories of Objects 1 and 2, together with their comparison against the corresponding simulations, have already been analyzed earlier (see Figs. 5 and 6). Therefore, in this section, we primarily discuss these two objects through their average contact force values, which are summarized in Table 3. For Object 3, which exhibits markedly different pneumatic behavior, the complete experimental results are presented in Figure 8, including the average contact forces across the five bellows shown in Figure 8b.
Comparative Analysis of System Performance
Figures 7g, h, i, j, 8e, and 8f compare the displacement-force relationship of each of the 5 bellows with and without the proposed admittance control. The 3D visualization captures the spatiotemporal dynamics and interbellow coupling essential for understanding the actuator’s behavior by integrating displacement (height) and force (color) data through physics-based interpolation, revealing continuous deformation fields, wave propagation patterns, and the effects of different control strategies.
For Object 1, both control strategies successfully achieved stable contraction of the bellows. With the application of admittance control, the pressure input fluctuates upon contacting the object, as illustrated in Figure 7e, indicating compliant behavior. Further analysis of the admittance control’s effectiveness (Table 3) reveals that the admittance-controlled FT-SDRE controller achieved an average contact force of 0.0246 N compared to 0.0277 N obtained by the original FT-SDRE controller. This represents an 11.55% reduction in average contact force, demonstrating the enhanced compliance capabilities of the admittance control scheme.
For Object 2, both controllers were capable of coordinating the expansion and contraction of the bellows. However, with admittance control, all five bellows exhibited compliant oscillations during contact with the object. As observed in Table 3, the average contact force was reduced from 0.2078 N to 0.1704 N (decrease 17.99%). While both control methods generated similar expansion behavior, the admittance-based strategy responded to external contact forces by modulating the actuation, resulting in less rigid movement and smoother force output. This is especially evident in Figure 7g and i, where the bellows no longer strictly follow the reference trajectory (Fig. 7i) but instead apply soft, compliant pressure within a controlled range.
Object 3, shown in Figure 8, was an air-filled balloon designed to mimic the potential application of a smooth-muscle-inspired actuator in IGB testing. Unlike the previous two cases, the presence of a balloon introduces additional internal pressure and unpredictable deformation, meaning that force sensors at the front of the actuator may be compressed during both expansion and contraction phases. When admittance control was enabled, the designed actuator demonstrated reduced contraction amplitude across all bellows to limit contact force, as seen in Figure 8e and f. This behavior aligns well with actual physiological conditions, where the stomach exhibits low-amplitude peristaltic motion when accommodating an implanted IGB for weight loss intervention. We carried out a quantitative analysis of the results, as illustrated in Figure 8 and Table 3, demonstrating a significant reduction in average contact force from 0.1971 to 0.1213 N when admittance control is implemented, corresponding to a 38.46% decrease.
Across all three object conditions, the admittance control strategy consistently demonstrated enhanced compliance and reduced contact force in soft-object interaction. While control without admittance led to more pronounced peak forces, the admittance controller responded adaptively to contact, making it well-suited for future applications involving biological tissue or pressure-sensitive medical devices such as IGBs.
Discussion and Future Work
Mechanical performance and material safety discussion
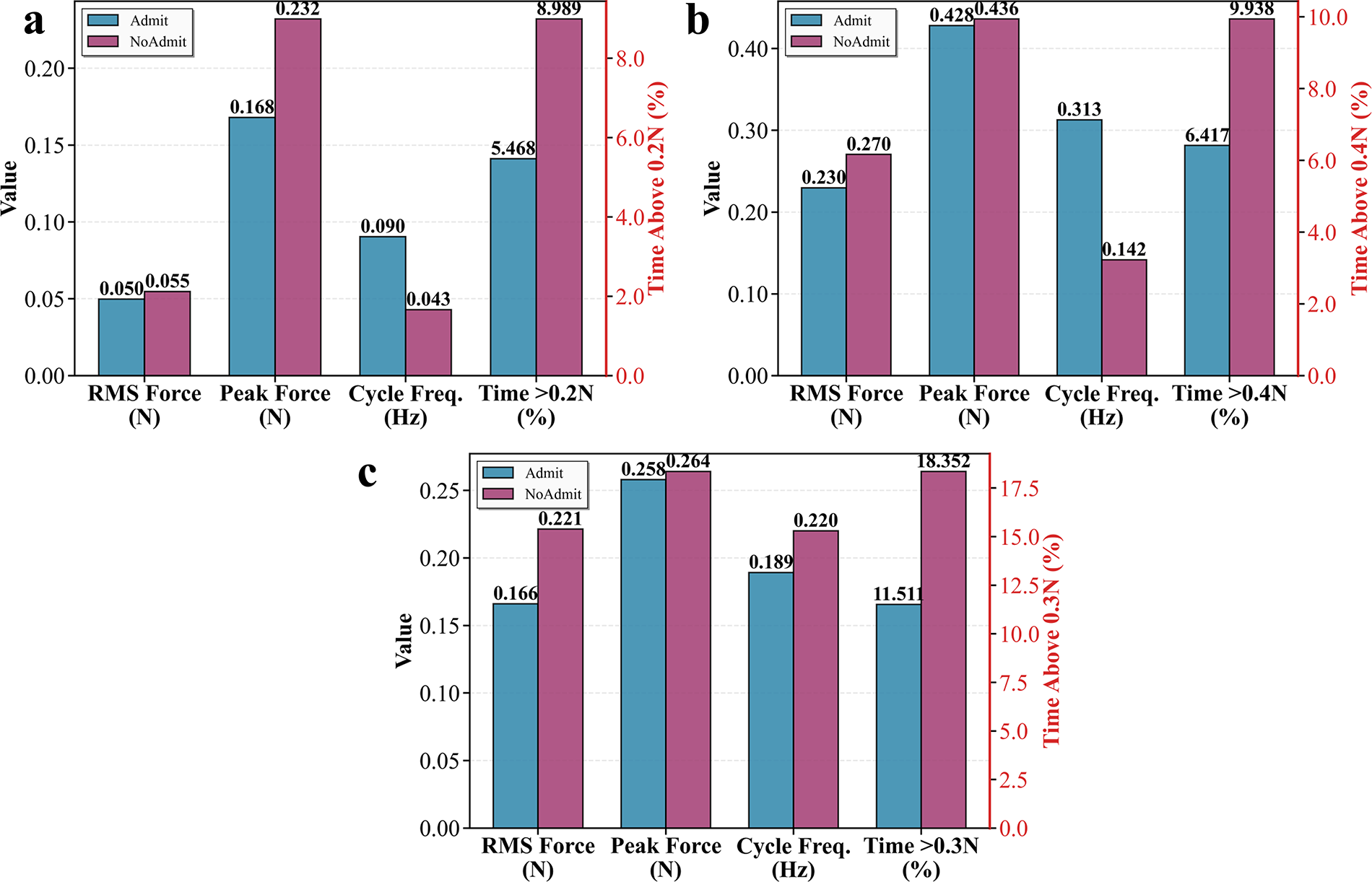
Figure 9a–c compares with admittance and without admittance-controlled operation, showing the change from only trajectory-driven motion to compliant interaction. Under admitted FT-SDRE, small and rapid adjustments happen in the force–displacement profiles while trajectory tracking remains well, indicating adaptive compliance rather than instability. Quantitatively (Table 4), Root Mean Square (RMS) force decreases for all objects (Object 1: −9.0%, Object 2: −15.2%, Object 3: −25.0%), and the time above threshold decreases markedly (−35–39%), indicating reduced sustained stress on the bellows and a lower possibility of fatigue damage. Together, the reduced sustained load, shortened high-force period, and moderated peaks support that admittance control results in a more moderate loading profile and improves long-term mechanical safety.
Experimental comparison of actuator behavior under nonadmittance and admittance-controlled FT-SDRE operation, demonstrating improved compliance and reduced contact force:
Force Characteristics Comparison

The rise in cycle frequency for Objects 1 and 2 (+110–121%) reflects small-amplitude corrective modulation of the compliant loop at low absolute rates (<0.5 Hz) and is accompanied by lower RMS force and shorter high-force period, indicating that overall stress is reduced even though micro-corrections occur more frequently. Fatigue in elastomeric components is governed primarily by strain amplitude, peak stress, and high-load period; frequency is a secondary factor over low-frequency ranges typical of our tests.50,51 Dynamic-mechanical data for medical-grade silicones indicate stable moduli across wide frequency windows relevant to soft-robotic actuation.52,53 Moreover, soft pneumatic actuators made from Ecoflex elastomers have demonstrated durability on the order of
Overall, the combined findings from Figure 9 and Table 4 clearly demonstrate that the admitted FT-SDRE framework achieves an effective balance between motion tracking and compliant interaction. By lowering both sustained and peak contact forces while maintaining stable and responsive motion, the proposed control strategy significantly improves the mechanical safety, adaptability, and long-term reliability of the smooth-muscle-inspired actuator within gastric simulation scenarios.
Limitations and future work
Although the present study demonstrates the feasibility of the smooth-muscle-inspired actuator for gastric applications, some limitations remain. For instance, the current prototype and testing setup were simplified for concept validation, without considering all physiological conditions. However, these simplifications do not affect the generality of the proposed mechanism and control framework.
For the three-phase contact, the current framework assumes quasi-static elastic behavior, while real soft tissues and actuators often exhibit viscoelastic and rate-dependent responses. To address this, time-dependent constitutive models such as the Kelvin–Voigt and standard linear solid formulations will be incorporated to capture stress relaxation, creep, and hysteresis behaviors, providing a more realistic description of smooth muscle-like mechanics. Another important direction is to extend the approach to multiactuator configurations. 14 We will control multiple bellows in a coordinated way and regulate their local interaction forces,55,56 so that the actuator can be explored to the whole stomach, while future studies will also investigate computational efficiency and real-time implementation challenges in multiactuator setups to ensure timely feedback and stable control. In addition, the simplified point-contact assumption will be replaced with a soft and stretchable force-sensing layer 57 that continuously measures pressure distribution across the interface, enabling spatially resolved interaction modeling and data-driven validation.
These extensions will bridge the gap between theoretical modeling and biological reality, leading toward intelligent, feedback-driven soft-robotic systems capable of replicating physiological interactions with high fidelity.
Conclusion
This study presented an admittance-based finite-time combined force–displacement control framework for a smooth-muscle-inspired actuator, aiming to enhance the adaptive compliance and safety of soft-robotic gastric simulators. The proposed two-layer architecture integrates an outer-loop admittance controller with an inner-loop finite-time state-dependent Riccati equation (FT-SDRE) controller, enabling real-time modulation of the trajectory reference according to contact forces while ensuring finite-time convergence under nonlinear dynamics. A three-phase deformation-force contact model was calibrated experimentally to capture the nonlinear transitions between elastic and large deformation regimes, providing a quantitative foundation for interaction analysis. Experimental results demonstrated that the admittance-controlled FT-SDRE strategy significantly improves the mechanical compliance of the actuator. Across three objects with distinct mechanical characteristics, the average contact force was reduced by 11.19%, 17.99%, and 38.46% for irregular gelatin, regular gelatin, and an air-filled balloon, respectively. The system exhibited adaptive oscillatory responses that dynamically balanced motion and interaction load, reproducing the physiological postprandial behavior of the stomach, in which muscle contractions become compliant after feeding to prevent excessive opposition to luminal contents.
Footnotes
Author Disclosure Statement
No competing financial interests exist.
Funding Information
No funding was received for this article.
Author’ Contributions
S. J.: Conceptualization, Methodology, Software, Validation, Data curation, Investigation, Visualization, Writing—original draft, Writing—review & editing. S. K.: Supervision, Methodology, Software, Writing—review & editing. M. S.: Supervision, Validation, Writing—review & editing. L. K. C.: Supervision, Validation, Writing—review & editing. W. X.: Supervision, Conceptualization, Resources, Methodology, Writing—review & editing.
Supplemental Material
Appendix
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.