
Abstract
Soft-legged mobile robots require actuators that can deliver both rapid extension and bending motions while generating high-output force to meet the demands of load-bearing and diverse locomotion tasks. This study introduces a bistable origami-inspired soft pneumatic actuator (BOSPA) featuring multiple deformation modes tailored for soft robotic locomotion. The actuator consists of a 3D-printed, inflatable soft Miura-origami tube structure with two parallel air chambers and strategically placed elastic rings in both horizontal and vertical orientations to enable bistability. By programming the driving air pressure of the chambers, the actuator achieves multiple deformation modes, including linear extension, bending, and coupled bending/extension motions with snap-through bistability transitions. To demonstrate the capabilities of the BOSPA, this study designed four soft robots employing different numbers of BOSPA with versatile locomotion modalities. The reversible and rapid linear jump-extension motion of the BOSPA enables a jumping robot to achieve continuous jumps reaching 0.65 body lengths (BL) at 1.25 Hz. A crawling robot using the same actuator achieves straight-line motion at 1.22 BL/s and can ascend inclined surfaces up to 14°. A tripod robot with three BOSPA realizes rolling locomotion by dynamically shifting its center of mass and can also perform peristaltic crawling or leg-propelled movement. A quadruped robot equipped with four BOSPA modules demonstrates rapid pacing and trotting gaits for effective obstacle traversal and can carry payloads up to 20 times the weight of its soft BOSPA legs, with a maximum load capacity of 2 kg.
Introduction
Soft robots are constructed from flexible, highly deformable materials and are typically actuated by pneumatics, hydraulics, tendons, and smart material-based systems.1–4 Soft mobile robots have garnered increasing attention due to their ability to interact safely with humans, adapt to unstructured environments, and exhibit high maneuverability.5–13 In particular, continuous innovations in joint drive mechanisms, control strategies, and bionic designs, such as hydraulic origami drive, magnetically controlled cable-free adjustment, and humanoid muscle coordination mechanisms, are gradually driving soft robots toward higher flexibility, adaptability, and intelligence. Among terrestrial animals, legged locomotion is an important dominant form of movement. Research on the dynamic movement of legged robots has primarily concentrated on rigid mechanisms.14–16 Soft-legged robots can leverage their deformable structures to achieve passive compliance, thereby offering enhanced adaptability to complex and variable terrains. A wide range of soft-legged robot prototypes have been developed in recent years.17–21 However, many of these robots continue to face limitations in gait versatility, rapid locomotion, and payload capacity.22–25
Bistable structures are of considerable interest due to their distinct functional advantages. A bistable structure possesses two stable states that can be maintained without continuous energy input. Such structures enable rapid state transitions and improved actuation efficiency, effectively generating output force through snap-through transitions between the two stable states. 26 However, current soft robots incorporating bistable mechanisms exhibit a limited number of deformation modes.27,28 For example, Tang et al. 29 proposed a bistable soft robot design based on elastic instability, achieving high speed and load capacity via a spine-inspired bending bistable mechanism. The spine mechanism provides limited degrees of freedom and lacks sufficient deformation versatility, thereby constraining its applicability in tasks that demand complex motions and functional diversity.
Through the systematic design inspired by origami and paper-cut structures, soft actuators can achieve multiple deformation modes,30–32 such as bending 33 and twisting, 34 thereby greatly enhancing their flexibility and adaptability and broadening their potential applications. Guo et al. 35 proposed a soft pneumatic actuator, KiriSPA, inspired by paper-cutting techniques, which is capable of multiple deformation modes, including bending, stretching, and contraction, thus substantially enriching the motion repertoire of soft robots. However, its relatively slow actuation speed limits its suitability for applications that require rapid motion. Although integrating bistable structures with soft pneumatic actuators and tubing networks may provide a potential solution, such approaches typically require intricate and bulky configurations.36–38 Yang et al. 39 proposed an electronics-free autonomous soft robot based on a bistable fabric mechanism. Its bistable jumping lacks the capacity for continuous and compliant leg joint movements. Therefore, a key challenge in soft-legged robotic locomotion lies in the development of simple soft bistable actuators whose deformation behavior is intrinsically coupled with pneumatic components to enable efficient and programmable control.
In this article, we propose a bistable origami-inspired soft pneumatic actuator (BOSPA) with multiple deformation modes for soft-legged robotic locomotion, aiming to achieve multiple deformation modes, amplified output force, and rapid motions. The BOSPA consists of three main components: a 3D-printed, inflatable soft Miura-origami tube structure with two parallel air chambers (MSA), rubber elastic rings, and 3D-printed rigid connectors. The bistable mechanism—realized through the integration of the rigid connector and elastic ring—enhances the output force, speed, and workspace of the MSA. Furthermore, to meet the demands of complex practical applications, the 3D-printed connector can be customized according to specific design requirements, allowing for modular integration of multiple BOSPA units and supporting multimodal actuation control for functional adaptability. The structure of this article is as follows: First, the design and working principle of BOSPA are introduced. Next, experimental validations and finite element simulations (FEA) are conducted to evaluate the performance of the BOSPA. Finally, four BOSPA-based soft robots—including jumping, crawling, tripod, and quadruped configurations—are presented to demonstrate the system’s versatility, terrain adaptability, and motion efficiency.
Design and Working Principle of BOSPA
Origami actuators have garnered increasing attention in the field of robotics due to their multiple deformation modes 35 and to accommodate extensive folding–unfolding deformation ranges. 40 The BOSPA is inspired by a foldable Miura-origami tube structure, incorporating a bistable configuration that comprises a pair of rubber elastic rings arranged horizontally and vertically and is equipped with rigid connectors to secure the elastic rings to the Miura-origami structure, as illustrated in the exploded 3D view in Figure 1A. The geometric parameters of the MSA’s structural design are detailed in Supplementary Figure S1.

Design and applications of BOSPA.
The multiple deformation modes of the BOSPA are contingent upon the strain asymmetry induced by applied air pressure. The BOSPA features two independent air channels (ACs), which can be activated separately by air pressure. When identical positive pressure is applied to both ACs simultaneously, they exhibit the same expansion strain, thereby generating an extension motion based on the Miura-origami tube structure. Conversely, when positive pressure is applied to a single AC, it produces expansion strain while the other AC serves as a constraint, converting the axial deformation of the pressurized AC into bending motion. When different positive pressures are applied to the two independent ACs, they generate varying expansion strains, resulting in coupled bending and extension motion. A video demonstrating the BOSPA’s various deformation behaviors is available as Supplementary Movie S1.
Figure 1B illustrates the FEA-simulated motion: starting from Stable State I, simultaneous pressurization (P1, P2 > 0) raises the energy barrier (Fig. 1D) until Unstable State I, after which a snap-through leads to Stable State II, defining the extension stroke l. The BOSPA’s negative incremental stiffness ensures rapid, passive switching (Fig. 1C). Supplementary Figure S2 and Movie S2 document the thrust–stroke and triggering process, respectively.
In bending mode, one AC inflates (P1 > 0, P2 = 0 or vice versa), guiding the actuator into Stable State III/IV until pressure release, with the bending angle θ further increased due to the tension provided by the elastic rings (Supplementary Fig. S3). This monostable mode provides high torque and turning capability for crawling and trotting gaits, while coupled bending–extension enables peristaltic and hoof-walking motions (Supplementary Fig. S4).
Figure 1E showcases four robots—jumper, crawler, tripod, and quadruped—each built from BOSPA modules. These prototypes demonstrate rapid, continuous jumps, high-speed crawling, versatile rolling/walking, and adaptive, load-bearing quadrupedal gaits, respectively.
The MSA component of the BEMSA is 3D printed using thermoplastic polyurethane elastomer material 85 A (Kexcelled), while the remaining components are constructed from thermoplastic polyester material (PLA) (Bambu Lab), achieving lightweight (30 g), cost-effective actuators. Detailed printing parameters and assembly are provided in Supplementary Data.
Results and Discussion
Bistable mechanisms for force amplification and workspace enhancement
This section evaluates the deformation characteristics and output force of the BOSPA module, focusing on its extension stroke l (Fig. 2A), bending angle θ (Fig. 2B), blocking force (Fig. 2F), and torque (Fig. 2I). To isolate the impact of elastic-ring configurations, three variants are compared: the MSA without elastic ring, which establishes a reference for soft origami deformation but yields limited force and lacks bistability; singly horizontal elastic ring soft actuator (SESA), which adds only horizontal rings to amplify extension stroke and blocking force but lacks the vertical elastic element and fails to self-reset; and BOSPA, which incorporates both horizontal and vertical rings to restore automatic retraction while preserving force and displacement gains, thus enabling repeatable actuation.
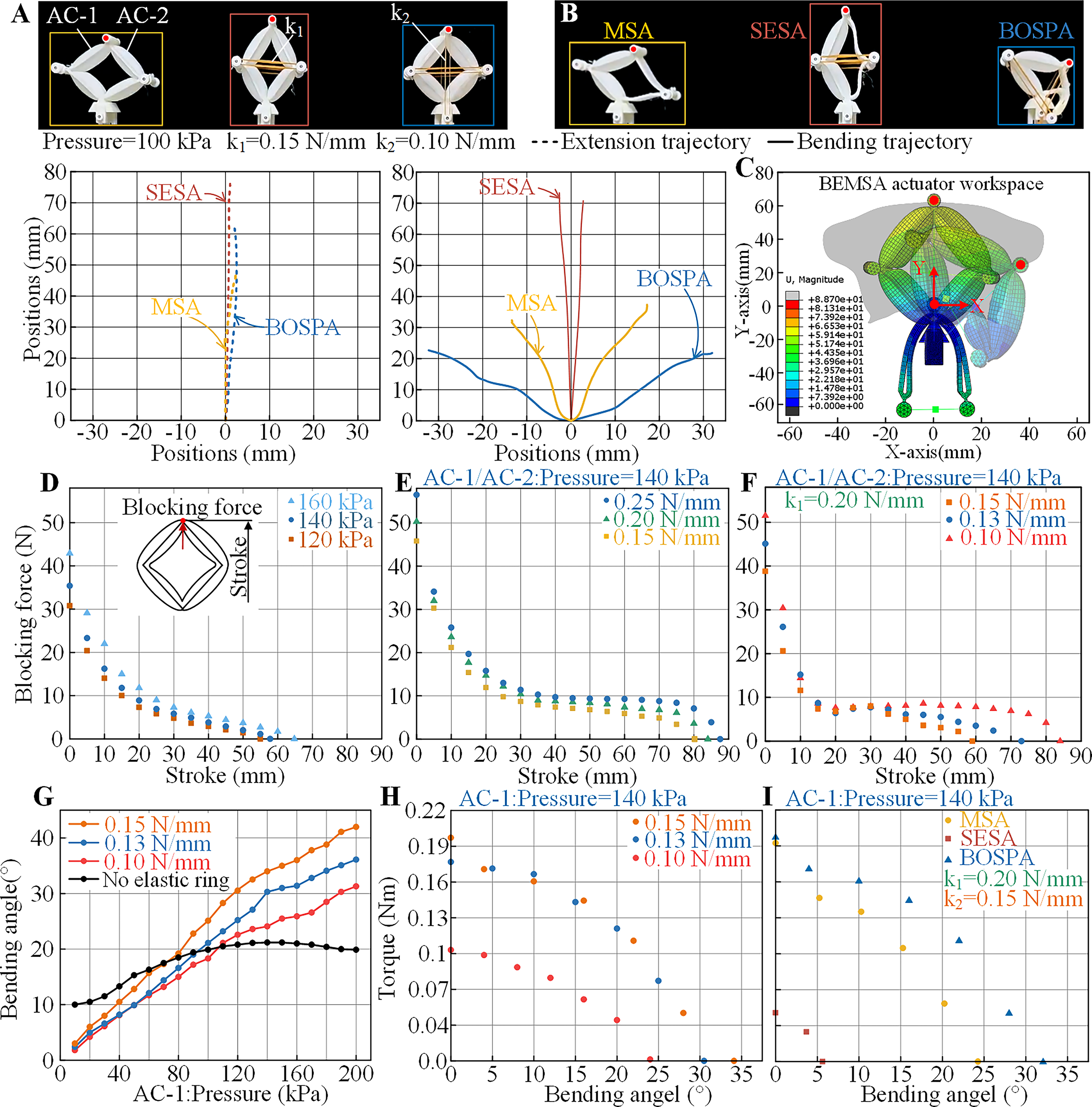
Performance comparison of BOSPA (blue), MSA (yellow), and SESA (red).
Figure 2A illustrates the extension trajectories. With both AC-1 and AC-2 at 140 kPa, SESA achieves the greatest stroke yet cannot return to its initial state due to the horizontal ring’s tensile force exceeding the actuator’s restoring force (Supplementary Movie S1). Figure 2B shows that BOSPA attains a maximum bending angle exceeding 40°, approximately double that of the MSA, thanks to the tensile forces provided by its horizontally and vertically arranged elastic rings. Figure 2C depicts the reachable workspace of the BOSPA end point as determined by FEA. The BOSPA end point exhibits two controllable degrees of freedom—a translational DoF and a rotational DoF—making it particularly suitable for use as a soft robotic leg during stance and swing phases.
Then, the effects of input air pressure, as well as the stiffness of the horizontal and vertical elastic rings, on the performance of BOSPA were analyzed. MSA’s extension under varying pressures (Fig. 2D) shows increases in stroke and blocking force. Under 140 kPa air pressure, MSA achieves 57.8 mm stroke and 35.4 N blocking force. Adding horizontal rings of 0.15, 0.20, and 0.25 N/mm produced SESA, which max reached 88 mm stroke and 56.5 N force—a 1.45 and 1.60 times improvement compared with MSA (Fig. 2E). To enable self-reset, vertical rings of 0.10, 0.13, and 0.15 N/mm were added to the BOSPA with 0.20 N/mm horizontal ring set, demonstrating that increasing vertical stiffness reduces stroke and force and that an optimal stiffness must be chosen to balance returnability with performance (Fig. 2F).
Figure 2G presents bending behavior: at 140 kPa, MSA achieves 21.2°, rising to 34° with a 0.15 N/mm vertical ring. At 200 kPa, MSA’s angle falls to 19.9°, but with the ring, it jumps to 42°, showing that the vertical ring both amplifies bending and delays unwanted expansion. Figure 2H confirms that torque scales with bending angle.
Figure 2I summarizes comparative performance at 140 kPa: MSA achieves 24.2°/0.192 Nm, SESA 5.6°/0.047 Nm, and BOSPA 32.3°/0.211 Nm, demonstrating that BOSPA outperforms both MSA and SESA in torque and workspace.
Jumping and crawling robots
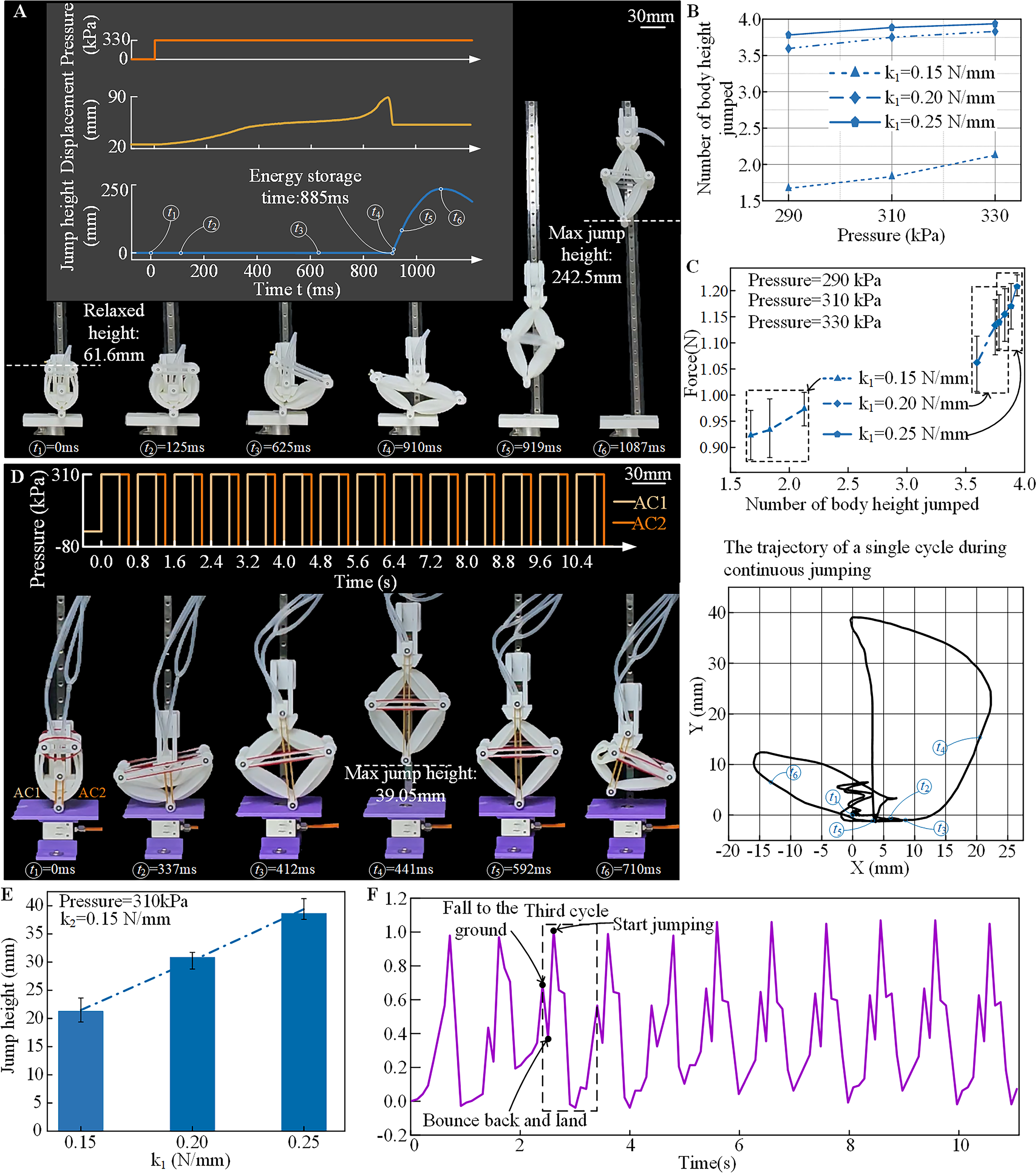
This section presents the design and performance of a jumping robot and a crawling robot, both with one soft pneumatic actuator module. To quantify single-jump performance, we tested SESA with three ring stiffnesses (0.15, 0.20, and 0.25 N/mm) to evaluate the single-jump performance of the jumping robot. Figure 3A shows that the SESA with a 0.25 N/mm horizontal elastic ring at 330 kPa in both chambers yields a 1087 ms jump cycle with an 885 ms (81.4%) energy-storage phase. During storage, the horizontal ring extends from 25 mm to 89.3 mm, accumulating elastic energy that propels a 242.5 mm jump, approximately 3.94 times the static height. The energy storage process is depicted as the transition from Stable state I to Unstable state I in Figure 1D, while the jump process corresponds to the transition from Unstable state I to Stable state II. Subsequently, the effects of the stiffness of the horizontal elastic ring and the driving air pressure on the jumping height, as well as the influence of varying heights on the ground force, were further investigated (see Fig. 3B and C). The experimental results indicate that increasing the stiffness of the horizontal elastic ring significantly enhances the robot’s jumping height. The single jump video is available for viewing as Supplementary Movie S3.
Bistability in the jumping robot.
Three main factors limit further increases in jump height and output force. First, the upper limits of material and sealing performance. As the driving air pressure increases, the stress on the inner wall of the cavity increases linearly. If the stress exceeds the tensile strength of the material, the cavity will burst or permanently deform. Second, the efficiency of energy storage and release. Jumping requires instantaneous energy release. If the bleed valve flow is insufficient, energy release will be too slow, and the force cannot be fully converted into take-off speed. Instead, it will create a “slow push” and significantly reduce the take-off height. Finally, there is the role and trade-offs of the elastic ring stiffness. Although high stiffness can increase the elastic potential energy density for the same amount of deformation, it also carries the risk of multiple coupling failures. For example, if the elastic ring stiffness is too high, the air pressure cannot stretch the elastic ring to the ideal energy storage position. If the stiffness is too low, the potential energy density is insufficient, the rebound driving force is weak, and it is difficult to quickly overcome the inertia of the actuator and load.
As shown in Figure 3D, continuous jumping is achieved by integrating the BOSPA module into the robot, driven at 1.25 Hz via rapid, reversible extension–retraction cycles. Actuation pressure was set to 310 kPa, with AC-1 inflated for 0.4 s and AC-2 for 0.6 s, and shortening AC-1’s inflation by 0.2 s accelerates the reset phase. The vertical spring length in the initial state is 20 mm. The stiffness of elastic rings 0.25 N/mm (horizontal) and 0.15 N/mm (vertical) was selected, under which the BOSPA sustained continuous jumps of 39.05 mm. Figure 3E demonstrates that increasing the stiffness of the horizontal elastic ring directly enhances the BOSPA’s continuous jump height. Throughout continuous jumping at 1.25 Hz, the peak ground reaction force remained stable around 1 N (Fig. 3F), demonstrating robust stability. The continuous jump video is available as Supplementary Movie S4.
Figure 4A illustrates the BOSPA-based crawler, an 83 mm–long chassis outfitted with four unidirectional-bearing soft wheels. The wheel structure plays a crucial role. One-way bearings are placed within the wheels and connected to the optical axis, ensuring the tracked robot’s rapid release of the BOSPA, converting the vehicle’s forward explosive force into efficient forward motion. The wheels intercept the slow, preparatory driving force, converting it into stored potential energy rather than inefficient, potentially backward motion or creeping. Linear propulsion is achieved by simultaneously inflating AC-1 and AC-2, while steering is effected via selective inflation of either chamber (Fig. 4B). At 300 kPa and 0.7 Hz, the crawler’s extension-phase speed is 2.6 times that of an MSA-driven crawler (Fig. 4C; Supplementary Movie S5). On a 14° incline, it can climb effectively (Fig. 4D; Movie 6), whereas the MSA crawler stalls at 6°. For obstacle avoidance, a 1.4 s bending cycle (0.6 s pressurized, 0.8 s decompressed) is employed (Fig. 4F). Negotiating an 18 cm equilateral-triangle barrier (Fig. 4E), AC-1 activation at 300 kPa induces a 0.71 Hz rightward bend, creating clearance to pivot left; AC-2 activation reverses the bend, guiding the crawler around the obstacle. By contrast, the MSA crawler’s limited bending angle prevents effective evasion (Supplementary Movie S7).
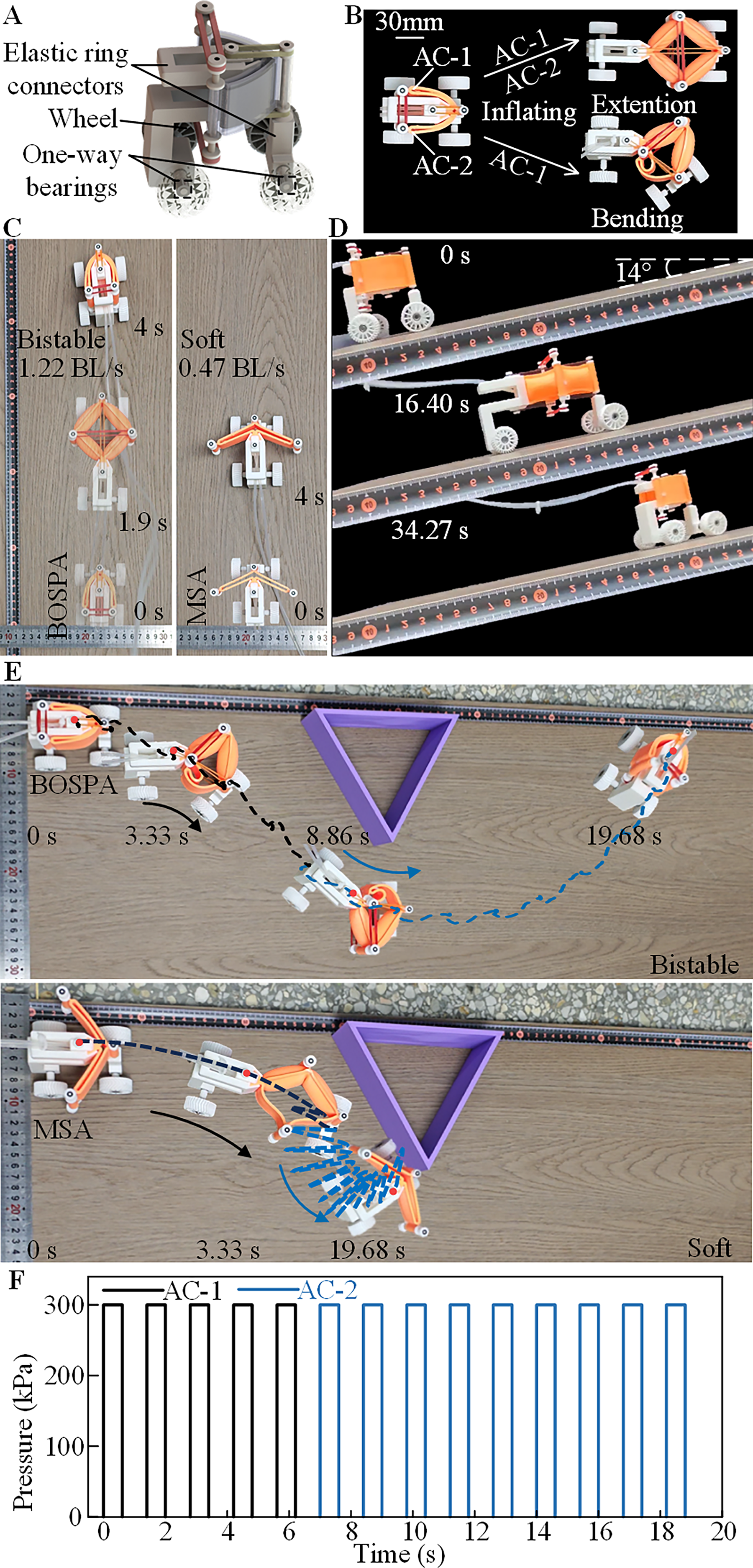
Multiple deformation modes and bistability for the crawling robot.
Tripod robot
A multimodal tripod robot was constructed using three BOSPA modules (Fig. 5A). The total length of the tripod robot is 156 mm, and the module fixtures and rolling frames are 3D printed using PLA. As illustrated in Figure 5B, the robot operates in two gait modes—rolling and walking. In rolling mode, the two air chambers of BOSPA-1 and BOSPA-2 (indicated by the numbers in the gray circle corresponding to the respective BOSPA modules) and AC-4 in BOSPA-3 are driven simultaneously with an air pressure of 410 kPa, initiating snap-through extension in BOSPA 1 to lift the chassis, bending in BOSPA 3 to tip it forward, and rapid mass shift via BOSPA 2 to complete each roll. As shown in Figure 5B, the robot completes a full rolling cycle after three consecutive rotations. In walking mode, the tripod incorporates a push-forward step for forward movement, achieved by simultaneously inflating the two air chambers of BOSPA-1 at an air pressure of 220 kPa to enable reversible instantaneous extension. The reaction force from the ground is then employed to propel the tripod robot forward. However, excessive thrust may cause the robot to tip over during forward movement. To mitigate this risk, while BOSPA-1 is inflated, AC-4 of BOSPA-3 is also inflated using the bending to increase friction between BOSPA-3 and the ground, thereby effectively stabilizing the tripod robot. In addition to relying on the extension for forward movement, an alternative step as peristaltic forward is also designed. The peristaltic forward step involves controlling the BOSPA-1 and BOSPA-3 modules to utilize the bending, thereby achieving forward pushing and stepping actions by simultaneously inflating AC-1 and AC-3 at an air pressure of 220 kPa. When AC-1 and AC-3 cease air supply, AC-2 and AC-4 are inflated to repeat the aforementioned actions, facilitating forward movement.
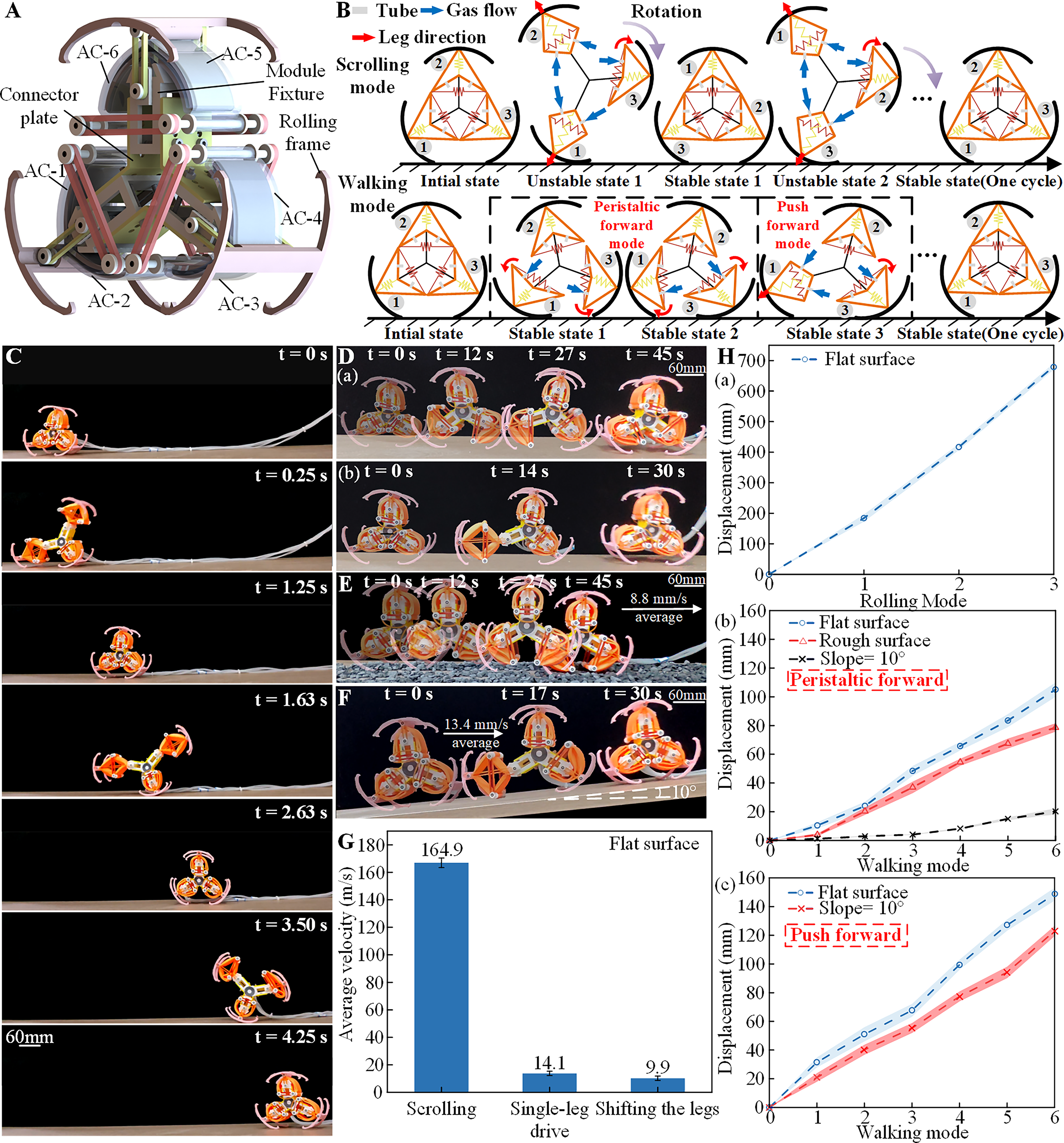
Multilocomotion modes of the tripod robot.
Under rolling mode on a flat surface, the tripod achieves an average speed of 164.9 mm/s (1.06 BL/s) and 681 mm displacement per cycle (Fig. 5C–H). On rough or inclined terrain, walking mode prevails: peristaltic forward sustains locomotion across stones at 8.8 mm/s (Fig. 5E), while push-forward climbs a 10° slope at 13.4 mm/s (Fig. 5F). A video demonstrating the tripod robot’s multi‐modal locomotion is provided as Supplementary Movie S8. Supplementary Figure S11 details the actuation pressure and control timing for each air chamber of the tripod robot.
Quadruped robot
BOSPA modules offer multi-DOF controllability and good load-bearing capacity, making them ideal as soft leg modules for quadrupedal robots capable of standing, trotting, and pacing. Figure 6A presents the 3D model of the quadruped robot comprising four BOSPA legs, corresponding PLA fixtures, a 168 mm long chassis, and a total weight of approximately 0.3 kg, with each BOSPA module weighing about 0.028 kg (Supplementary Fig. S6). BOSPAs 1–2 serve as hind legs, while BOSPAs 3 to 4 form the front legs. Figure 6B and C illustrates the pace and trot gaits. The pace gait employs reversible instantaneous extension in the extension to execute actions 1–3, followed by bending to bend forward on the ground for action 4 (Fig. 6B, actions 1–4). The trot gait utilizes the bending to alternate the diagonal front and rear legs for actions 1–3 and resetting to action 4 (Fig. 6C, actions 1–4). The trot gait for surmounting obstacles involves coordinated movement between extension and bending to complete actions 4–7 (Fig. 6C, actions 4–7). Drive air pressures are set to 430 kPa for pacing, 320 kPa for trotting, and 260 kPa for obstacle negotiation. Figure 6D and Supplementary Movie S9 demonstrate the quadrupedal robot as it traverses a distance of 300 mm under payloads, confirming its load-bearing and locomotion capabilities.
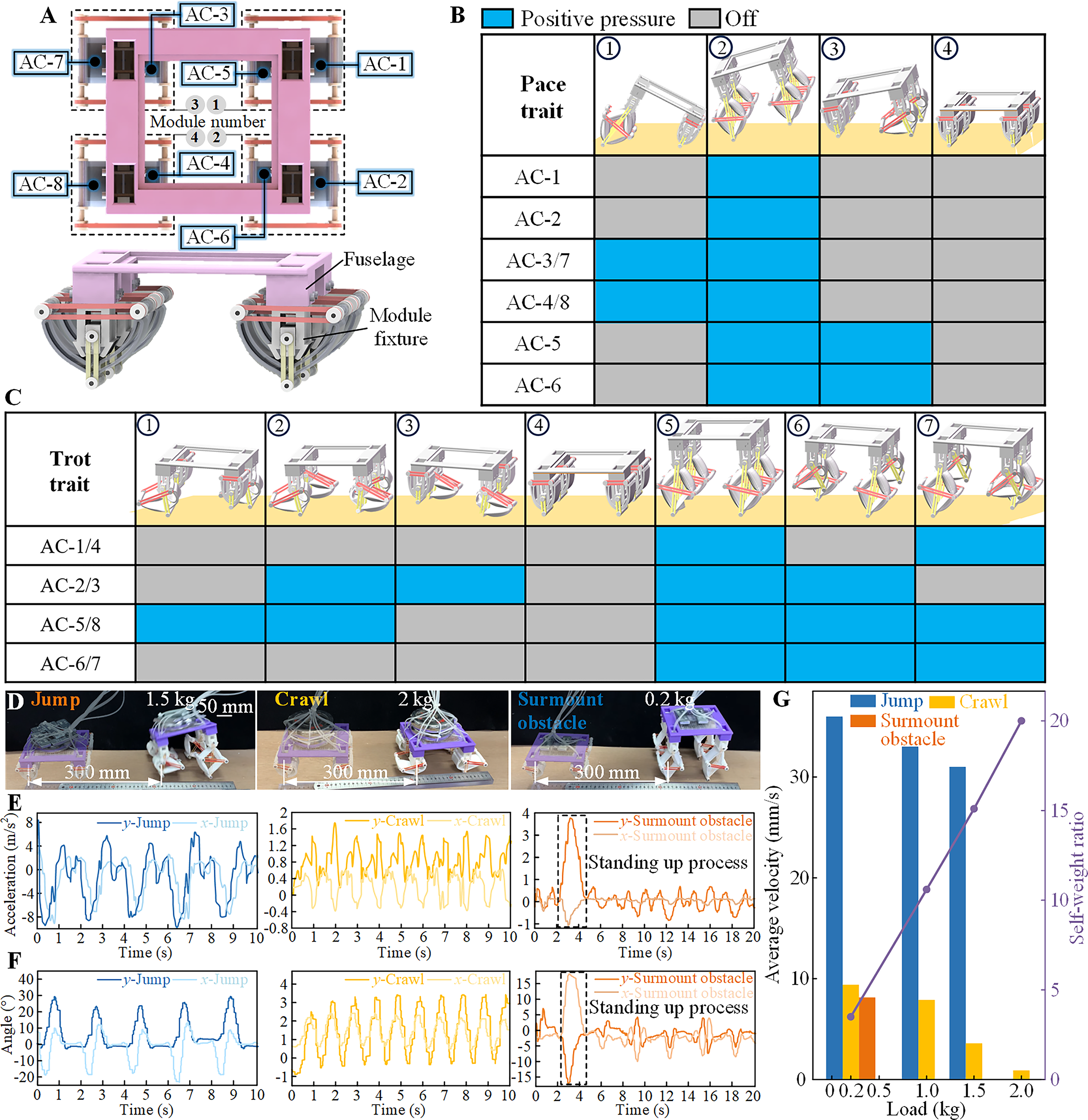
Gaits and load-carrying analysis of the quadruped robot.
Figure 6E and F presents the acceleration and angular displacement of the quadrupedal robot, corresponding to the motion and payloads set shown in Figure 6D. As shown in Figure 6G, the pace gait enables the robot to maintain rapid movement while bearing a load of 1.5 kg, achieving a speed 8.6 times greater than that of the crawling mode. The mass of the main body is approximately 0.188 kg, which should be considered part of the load supported by the soft leg (four BOSPA modules). The trot gait can enable the robot to sustain a load 20 times the weight of its soft BOSPA legs. Supplementary Figure S7 details the experimental setup, including pneumatic and control architecture.
To enable the quadruped robot to adapt to various working environments, three distinct motion modes have been designed based on its two primary gaits. As illustrated in Figure 7A, the jump mode is derived from the pace gait, while both the crawl mode and surmount obstacle mode are also based on this gait. In jump mode, the air pressure in air chambers AC1-8 is set to 410 kPa. In crawl mode, the air pressure in air chambers AC1-8 is 300 kPa. In surmount obstacle mode, the air pressure in air chambers AC1-4 is 210 kPa, while that in air chambers AC5-8 is 260 kPa. Figure 7B and C presents a comparison of the average speed and displacement of the quadruped robot across the three modes over a duration of 34 s. The average speed in jump mode reaches 15.2 mm/s, with a displacement of 53.7 mm. In contrast, the average speeds for crawl mode and surmount obstacle mode are 8.1 and 5.2 mm/s, respectively, with corresponding displacements of 26.3 and 15 mm. The experimental results indicate that the jump mode exhibits superior speed on flat surfaces (Supplementary Movie S10). As depicted in Figure 7D, jump mode also performs effectively in complex scenarios, such as traversing stairs and broken bridges (Supplementary Movie S11). Conversely, crawl mode and surmount obstacle mode are more suitable for low-clearance environments and navigating obstacles (Fig. 7E and Supplementary Movie S12). Figure 7F demonstrates that the quadruped robot can traverse cluttered environments (Supplementary Movie S13), including rubber mats, irregularly broken bridges, simulated lawns, gravel roads, and roadblocks. These results demonstrate that applying BOSPA to soft-legged robotic locomotion results in improved maneuverability through its various deformation modes and bistability.

Motions of the quadruped robot in various environments.
Conclusion
This article presents a BOSPA capable of multimodal deformation, amplified force output, and rapid motions for soft-legged locomotion. By modularly combining varying numbers of BOSPA modules with customizable 3D-printed rigid connectors, we realized a versatile lineup of robots—including a jumper, a crawler, a tripod, and a quadruped—each exploiting BOSPA’s bistability and multi-degree-of-freedom motions. The comparative evaluation of bistable configurations confirms that integrating elastic rings markedly amplifies output force and expands workspace. Under identical actuation pressures, BOSPA achieves an extension stroke 1.45 times, a blocking force 1.60 times, and a bending angle 2.1 times greater than the ring-free soft actuator. This force amplification stems from the snap-through bistability contributed by the horizontal ring, while the addition of the vertical ring ensures reliable reset and sustains these performance gains. Consequently, BOSPA modules deliver both enhanced drive efficiency and broader deformation range, establishing a robust foundation for versatile soft-legged robots. Table 1 provides a comparative analysis of the soft robotic locomotion applications of other bistable soft actuators.
Comparison of This Work with the Soft Robotic Locomotion Applications of Other Bistable Soft Actuators
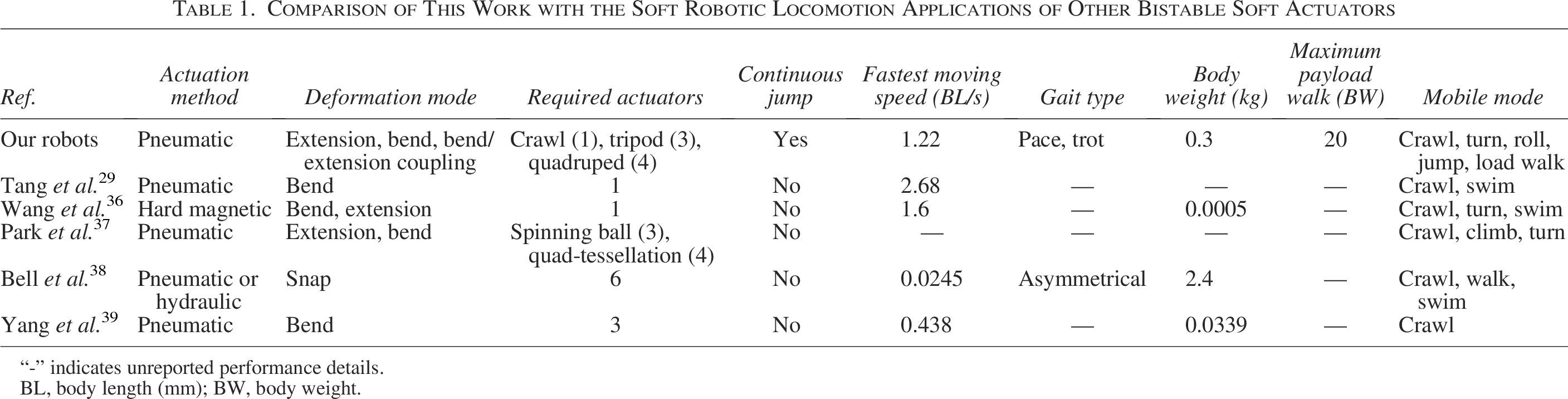
“―” indicates unreported performance details.
BL, body length (mm); BW, body weight.
Looking ahead, the advancements in pneumatic soft actuation and untethered soft driving technologies offer promising avenues for improving the practicality and autonomy of soft robotic systems.41–42 Recent studies have introduced compact and efficient pneumatic sources, such as soft pumps with multiple pumping modes43–44 and untethered soft actuator enabling fully stand-alone operation. 45 These developments could complement the BOSPA architecture by eliminating external pneumatic tethers and enabling untethered soft robots with extended operational capabilities. Building upon these opportunities, future work will focus on integrating embedded self-sensing elements—such as stretch, pressure, and curvature sensors—directly within the actuator to enable proprioceptive feedback and closed-loop control. This integration will support the development of control algorithms, allowing soft-legged robots to adapt autonomously to dynamic terrains and payload variations.
Footnotes
Author Disclosure Statement
No competing financial interests exist.
Funding Information
The work was supported by the Foundation for the National Natural Science Foundation of China (Grant No. 52105024).
Supplemental Material
Supplemental Material
Supplemental Material
Supplemental Material
Supplemental Material
Supplemental Material
Supplemental Material
Supplemental Material
Supplemental Material
Supplemental Material
Supplemental Material
Supplemental Material
Supplemental Material
Supplemental Material
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.