
Abstract
Origami techniques have significantly impacted robotics, expanding its capabilities in shape transformation. Pop-up transformations, inspired by pop-up books, offer intriguing applications in robotics fields, including deployable robots. However, designing origami-inspired robots for transitioning to a completely flat state poses unique challenges, particularly in multistate passive actuation. This article introduces the “pop-up catcher,” a gripper designed for multistate passive actuation that can be folded flat and actuated passively to grasp the object. To ensure its reliable state transition, we conduct “transition path planning” with the potential energy surface modulation. We demonstrate the pop-up deployment and passive capture of the target object using our flat-foldable catcher comprised of our pop-up gripper and self-locking modular Sarrus origami that can be folded into a profile less than 25 mm thick while capturing objects over 500 mm away.
Introduction
Origami, characterized by its inherent simplicity and reconfigurability, has influenced various scientific and engineering disciplines.1–4 Robotics represents one such field that benefits from origami, particularly in terms of design methodology and fabrication techniques. By harnessing the principles of origami, robotics has expanded its scope in shape transformation capabilities. This use has been evident in a range of applications such as lightweight manipulators and grippers,5–10 mobile platforms,11–14 medical robots,15,16 and deployable space structures.17–20
Pop-up transformations, inspired by the mechanisms found in pop-up books, present intriguing applications of origami. These transformations involve transitioning from a wholly flat shape to a specific three-dimensional form. The ability to make a completely flat shape ideally results in the minimal achievable volume, thus maximizing the space-saving benefits of origami. Although this concept originated in pop-up books, its ability to morph from a flat state to a three-dimensional structure has found high potential in diverse applications, ranging from pop-up constructions to self-assembling robots.21–23
Despite these advantages, designing an origami robotic system that can transition to a completely flat state presents unique challenges, particularly in relation to actuation. Two primary attributes of origami—the ultra-thin profile and high kinematic degrees of freedom (DoF), which are both compelling characteristics—necessitate actuation methods that are not commonly used or readily available. To address these challenges, various actuation techniques have been developed, including pneumatic inflation,9,23,24 shape memory alloys,25,26 and cable-driven systems.12,22
Passive actuation presents an alternative way to tackle these challenges, typically using structurally stored energy within the body of the system. 27 Systems capable of passive actuation commonly exhibit high redundancy in DoF.27–29 These spare DoF can create an energy potential field of the system by introducing elasticity or damping characteristics that determine the system’s behavior.27,30 As a result, interactions with the external environment trigger changes in the internal energy levels of the system. These energy-level fluctuations, in conjunction with the elasticity or damping characteristics assigned to the redundant DoF, create predefined motion sequences. This method reduces reliance on additional components, such as actuators and batteries, which are often necessary for active actuation systems, hence maintaining the inherent lightweight and compact benefits of origami.22,31 Simultaneously, it facilitates the execution of diverse and adaptable behaviors, even when faced with the constraints of limited actuation sources.32,33
To take advantage of passive actuation, diverse studies based on the potential energy landscape have been conducted to develop passive origami and physically intelligent systems.34,35 In the field of origami-based systems, the potential energy-based approach has served to improve multifaceted problems: stability, reconfigurability, and functional properties. Golden-ratio Yoshimura origami enabled the pop-out of complex shapes of booms and structures by meta-stability based on intentional defiance of constraints. 36 Modularized multistable origami was developed into meta-materials and robotic mobilities by integrating multiple combinations of bistability. 37 In addition to stability, dual-stiffness and threshold characteristics were realizable by layered elastic membranes. 28
While passive actuation energy offers several advantages, its reliability remains a significant challenge, limiting its application in various fields. The risk mainly occurs because passive actuation depends on DoF that do not involve active control, increasing the risk of mechanical singularities in systems with redundant kinematics.38,39 This issue becomes particularly problematic in the implementation of multistate actuation. At the bifurcation point between local energy minima, predicting the direction in which the system will be deployed becomes challenging. Common solutions include limiting the operation of passive actuation to prevent singularity or using dynamic inertia to dictate movement direction. However, these approaches restrict the design possibilities of multistate actuation systems.
In this study, we introduce the “pop-up catcher,” a gripper that can be folded into a completely flat configuration (less than 25 mm in thickness), capable of capturing objects located over 500 mm away using multistate passive actuation. The gripper is designed to operate in three distinct states: a flat-folded state, a capture-ready state, and a captured state. To address the challenge of reliable state transition in multistability systems, we have reshaped the energy potential field to avoid any expected bifurcation for passive actuation of the gripper. The modulation can be achieved by introducing additional DoF and rearranging the elastic elements, effectively circumventing singularity issues and ensuring stable actuation. Our demonstrations validate this approach, showing that the pop-up catcher maintains an extremely low profile while capturing various objects through physical contact without external actuators or sensors. In addition, we perform an analysis of the potential energy surface to realize a flat-foldable gripper origami with passive actuation capable of taking on three distinct states. Primarily, we derive the bio-inspired folding pattern and mechanical arrangement. Subsequently, experimental validations are carried out to confirm the modeling accuracy in terms of passive actuation and grasping capabilities. Finally, we introduce a fully flat-foldable and passive-actuatable pop-up catcher incorporating self-locking Sarrus origami and our passive gripper origami.
Design Approach
Initial derivation of a flat-foldable and bistable origami
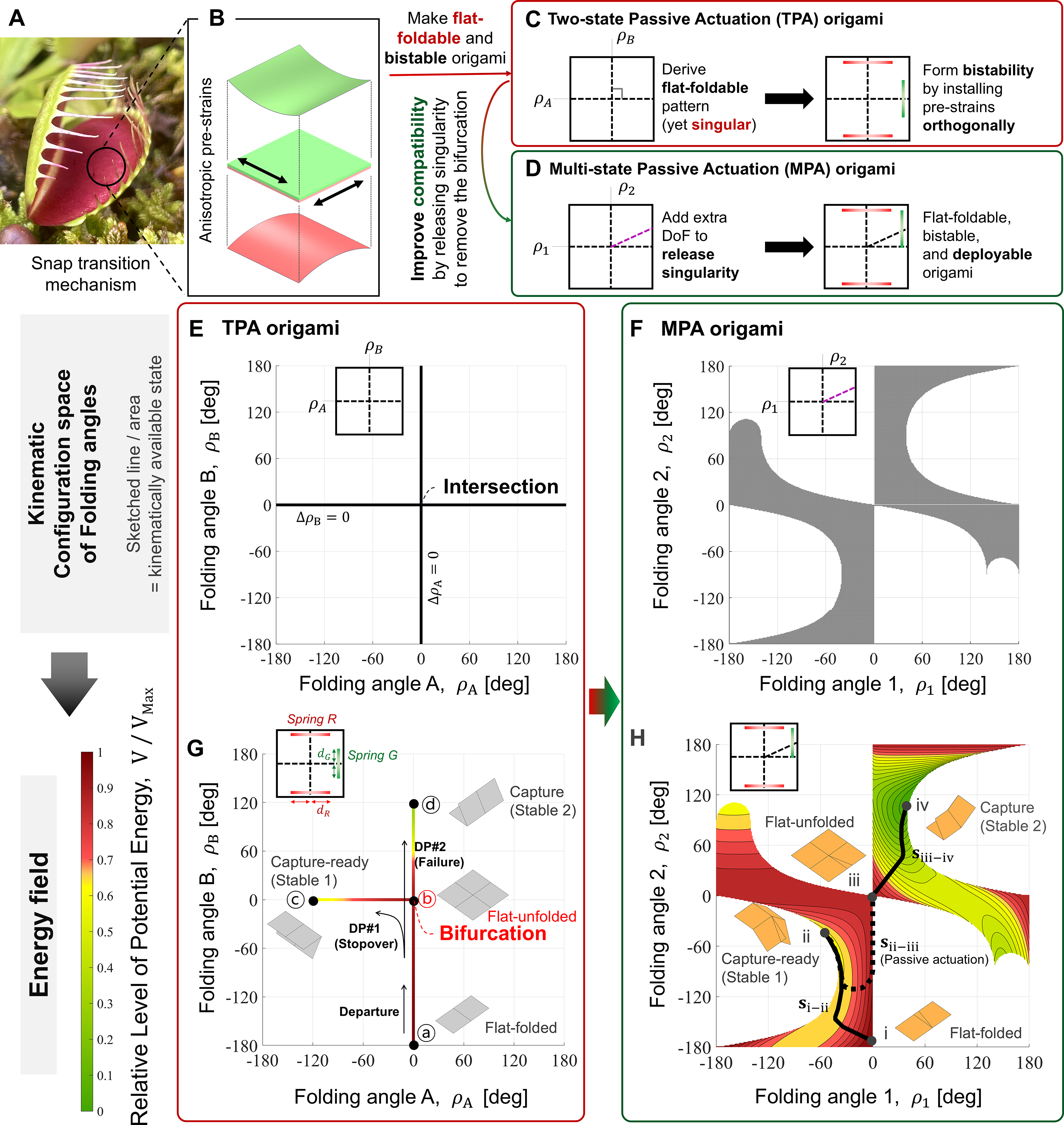
Anisotropically pre-strained structures inspired by the Venus-flytrap are widely used in developing rapid capture systems (Fig. 1A, B).40–42 These systems achieve fast motion by the snap transition from bistable energy properties. 43 However, storing the curved structure in a completely flat state can pose challenges and carry the risk of permanent deformation, compromising the functionality.
The design process of MPA origami.
To overcome the challenges of curved sheets, the inherent curvature can be replaced with an origami system consisting of pre-strained springs and rigid planar facets. Our approach to making a bistable yet flat-foldable system uses single-vertex origami with orthogonally crossing fold lines (Fig. 1C). The orthogonality and singularity of the fold-line pattern prevent both fold lines from varying simultaneously, leading to a cross-like kinematic configuration space of motion with respect to folding angles (Fig. 1E):


On the basis of the double orthogonal folding modes, bistability can be formed by installing pre-strained springs with an orthogonal arrangement—each stable state is generated at each folding mode because one folding angle is determined to be zero (see Supplementary Data for calculation of potential energy (V)):

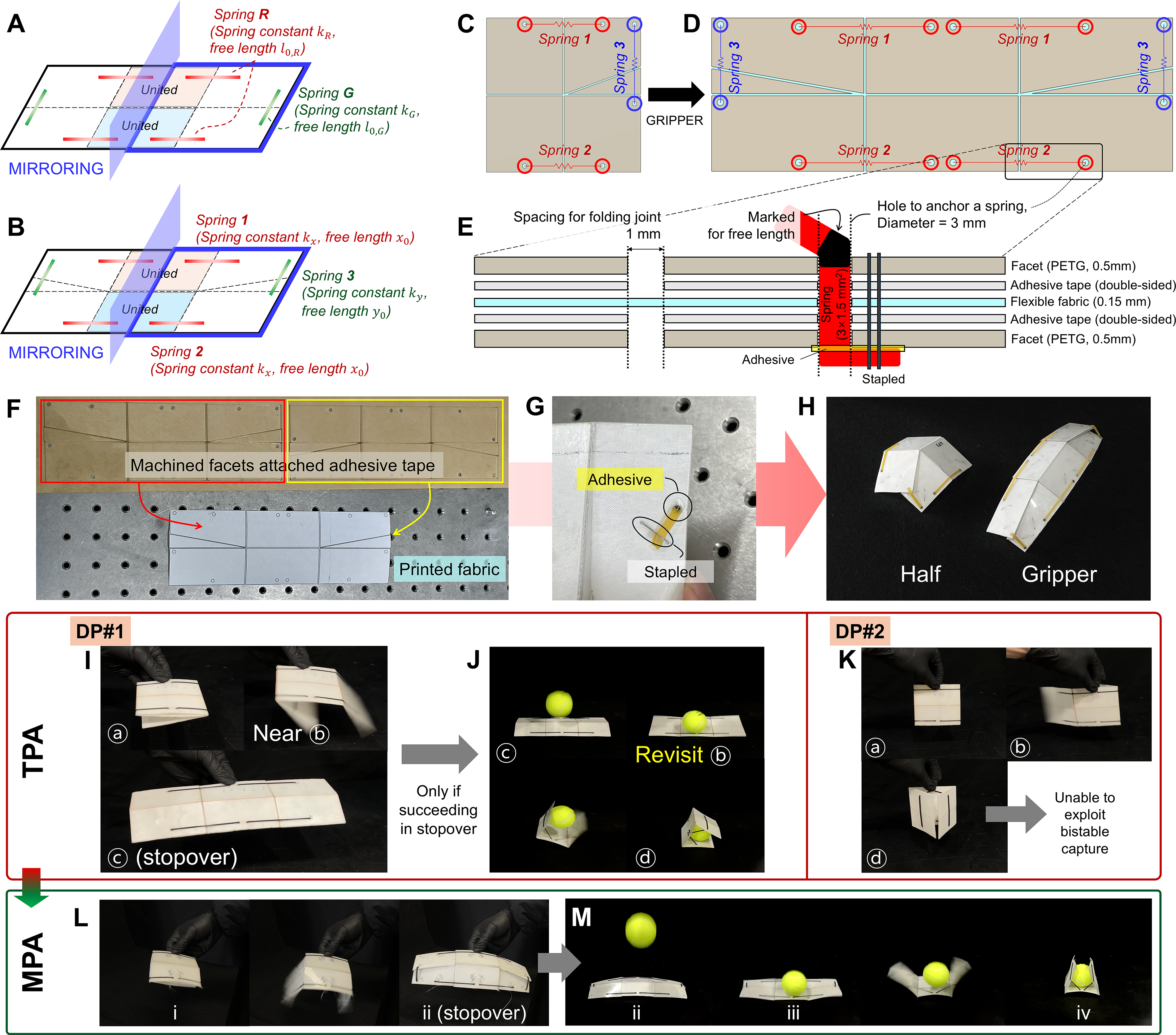
While the singular folding pattern allows for bistability and flat foldability (Supplementary Movie S1), it also introduces the risk of random deployment at the flat-unfolded state. Specifically, the pattern encounters a deterministic bifurcation point, offering two possible deployment paths (DP#1(ⓐ→ⓑ→ⓒ) and DP#2(ⓐ→ⓑ→ⓓ) in Figure 1G, which cannot guarantee the specific transition direction (Supplementary Movie S2). This bifurcation issue cannot guarantee the specific deployment even when the TPA origami is used for a gripper prototype derived by mirroring (Fig. 3A and I–K; Supplementary Movie S3).
Modification of the potential energy field for multistep deployment path
To address the multipath issue of TPA origami and release the singularity, increasing the kinematic DoF needs to be used. This objective can be achieved by modifying the fold-line arrangement and adjusting the system’s design, cutting, or changing material properties.10,28 In our design, a 2-DoF mechanism is derived by adding an extra fold line (Fig. 1D), maintaining the assumption of rigid origami, resulting in the multistate passive actuation (MPA) origami (Fig. 1F).
The same assumptions for TPA origami are used to model the potential energy of MPA origami: zero-thickness facets and axial springs across zero-stiffness fold-lines. The extra DoF provided by the additional fold-line allows MPA origami to be deployed in a much wider kinematic region (see subsection Kinematics analysis for kinematic equations of MPA origami), thus offering a variety of possible deployment paths according to the geometry of the pattern and properties of the springs. This flexibility enables MPA origami to avoid the bifurcation during initial deployment.
The energy field of MPA origami enables the prediction of the transition paths based on relative energy levels (
Regarding the deployment path, we can predict two types of paths: passive actuation with external interaction and self-deployment with no load. In the case of self-deployment, paths of initial deployment (“i” to “ii”) and snap-through deployment (“iii” to “iv”; Supplementary Movie S5) can be obtained by the minimum energy path under the quasi-static assumption (see Section Potential Energy Analysis for the potential energy model of MPA origami). Self-deployment occurs as energy decreases without any mechanical input:



Regarding the passive capture (ii to iii), a positive rotation of

The first constraint (
Kinematics analysis
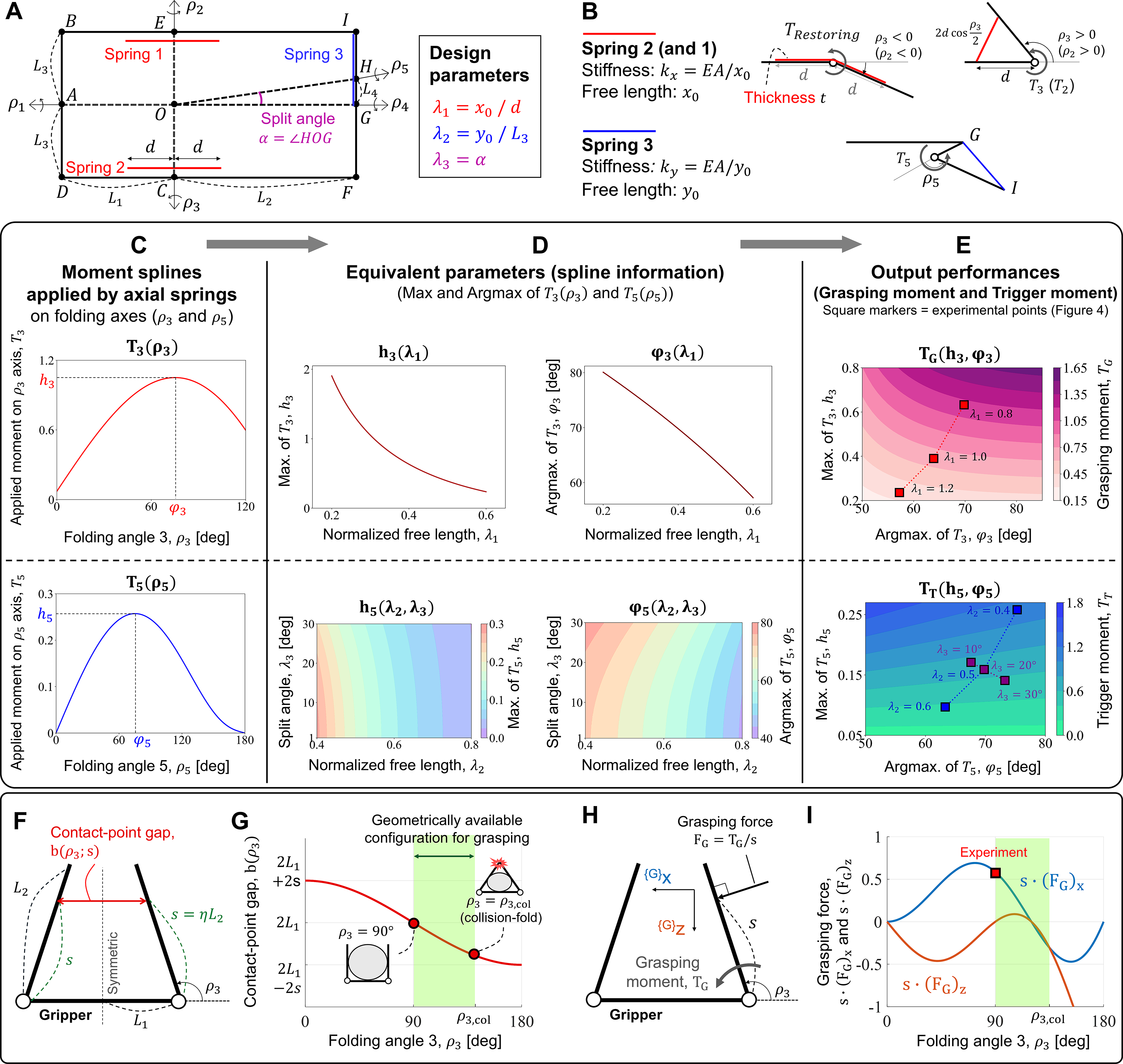
To obtain the kinematic configuration space of MPA origami (Fig. 1F), the position of node H is obtained through two independent ways: folding ρ3 and ρ4 and folding ρ2 and ρ3 (Fig. 2A). Assuming that facet OADC is a fixed reference plane and node O is the origin [0, 0, 0]T, two sets of positions for H can be derived:



Modeling of the performances of MPA origami.
Definition of Folding Angles
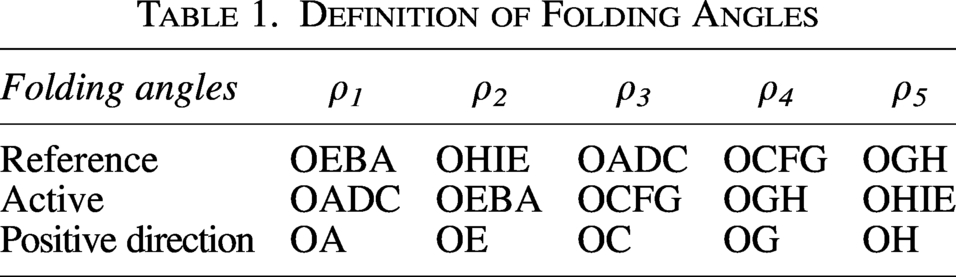
Furthermore, an equation regarding the folding angle 5 (
Using the kinematic information, a kinematic configuration space described by two folding angles can be produced, as shown in Figure 1F. In this work, a set of [
Potential energy analysis
The configurations of the folding pattern can be predicted by minimizing the potential energy state. In this study, three springs (springs 1, 2, and 3) are installed across 
Spring 2 can experience bending when negative across the 


The potential energy from spring 3, whose spring constant and free length are 
On the basis of equations (13)–(15), the potential energy surface can be obtained throughout the kinematic configuration space (Fig. 1H). Once the energy field is obtained, deployment paths can also be expected. The paths of self-deployment, such as
Parametric study of trigger and grasping loads
Bistable grippers can be evaluated with two performance metrics: trigger and grasping. From the energy-level analysis, two metrics can be defined: trigger moment 

Looking into the arrangement of springs, each spring force can be derived under the assumption of the bar spring model (Fig. 2B):



For trigger performance, the effect of 
Equation (21) shows that
Figure 2C–E summarizes the relationship between design parameters and output performances. Figure 2C shows the applied moment splines,
In addition to the shown output performances, the activation energy for snap-through can be obtained. Activation energy, 
Two performance parameters are considered: contact-point gap 
Geometric capacity can be estimated with folding configurations and contact-point distance.
Grasping force (
The normal grasping force is investigated to generalize the grasping performance of the origami. The normal force 

The equations allow for the estimation of the mechanical capacity for grasping. By referring to geometric and mechanical behavior, the folding pattern and equivalent moment profiles can be derived.
Materials and Methods
Design of folding patterns for the gripper
To extend the half patterns (Fig. 1C, D) into gripper patterns, the half-patterns of TPA and MPA origami are symmetrically mirrored, and the dotted lines mean fold lines or creases (Fig. 3A, B). Facets on the mirror plane are united into a single facet; no fold line is in the mirror plane (Fig. 3C, D). In this work, the arrangement and properties of springs are also symmetrically mirrored. The appearances of gripper prototypes of both TPA and MPA origami are presented in Figure 3I–M. The gripper is assumed to be passively actuated by
Fabrication of origami prototypes and transition test of grippers from TPA and MPA origami.
Fabrication of origami prototypes
For origami prototypes and specimens (Fig. 3H), multifacet patterning and multilayer lamination are adopted (Fig. 3C–F). Each facet is wholly separated and attached to both sides of a single flexible fabric layer, which plays the role of folding joints (Fig. 3E). This work adopts polyethylene terephthalate glycol (PETG) with a thickness of 0.5 mm for facets, which is quickly laser machinable (carbon dioxide laser; VLS6.75; Universal Laser). For folding joints, the inter-facet gaps are set to 1 mm, allowing a flat-folded configuration (2·0.5 mm). Drawings of origami patterns with separated facets and gaps are printed in one layer of flexible fabric with a thickness of 0.15 mm by a plotter (HP DesignJet T650).
An individual facet with an adhesive tape layer is attached to the top and bottom sides of the printed drawing (Fig. 3F), and the laminated structure’s flexural modulus is estimated to be 0.545 GPa and withstand repeated loads without significant degradation of the flexural modulus (Supplementary Data and Supplementary Fig. S2). Both ends of springs to be marked for free lengths are joined through the laminated structures and fixed by adhesive (LOCTITE® 401; Henkel) and staples (Fig. 3E–G). Springs with a thickness of 1.5 mm and a cross-sectional area of 4.5 mm2 are used for experiments, and springs with a thickness of 2 mm and a cross-sectional area of 30 mm2 are used to demonstrate large-scale prototypes. Young’s moduli of the elastomer bands are estimated to be 0.70 MPa and 0.86 MPa, respectively. The estimation of spring stiffnesses is presented in Supplementary Data and Supplementary Figure S1.
Prototypes for the demonstrations are also fabricated using the same method as other materials for facets, as shown in Figure 3E. The gripper of the flat-foldable pop-up catcher is fabricated with double-sided PETG (0.5 mm), and the Sarrus origami-based manipulator (Fig. 6A, B) is fabricated with PETG (0.5 mm) and acrylic sheet (1 mm). The spacing lengths between facets are 1 mm. For the second demonstration, the large-scale origami prototype is fabricated with PETG (0.5 mm) and acrylic sheet (5 mm), and its inter-facet spacing is 10 mm.
Load experiment
To experiment and measure the grasping and trigger forces, five specimens per design case are fabricated and subject to compressive load (“half” prototype in Fig. 3H). A tensile compress test machine (MCT-2150W; A&D) is used to measure the load (Figs. 3C and 4). All fixtures are made of aluminum (AL6061) and machined. The diameter of the loading nose for grasping load is 4 mm, and the facet OADC (Fig. 2A) is mechanically fixed onto the fixture (Fig. 4A, B). The radius and length of the loading nose for trigger load are 5 mm and 70 mm, respectively. The specimen’s
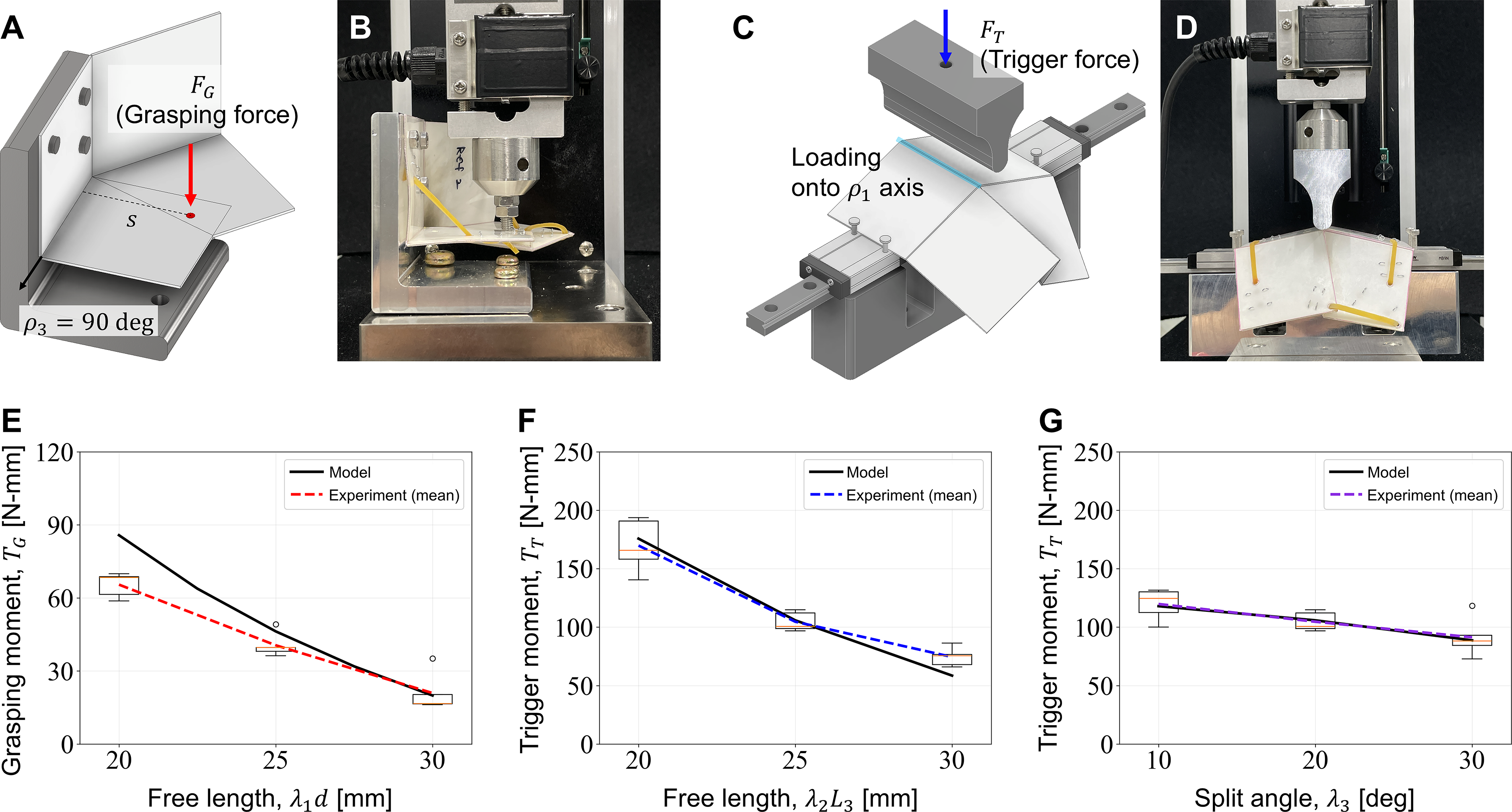
Drop test
To test the trigger performances of the gripper, the standard tennis ball with a mass and diameter of 56 g and 67 mm is used as a target object (Fig. 5). The object is subject to being dropped five times per drop condition. The incidence angles are adjusted by slope structures made of acrylic sheet with a thickness of 10 mm. The origami specimens are fabricated according to Figure 3D, E. The drop height is measured from the bottom of the object to the
Design of a sarrus origami-based pop-up manipulator
Previous studies have explored compact manipulators inspired by Sarrus origami.12,22 A flat-foldable pop-up manipulator is designed by exploiting the simplicity and flat foldability of the Sarrus folding mechanism (Fig. 6 and Supplementary Fig. S3). The deployed reach can be derived from the kinematic equations:



Design and prototype of the flat-foldable pop-up catcher consisting of an MPA origami gripper-based end-effector and Sarrus origami-based manipulator.
Design of an end effector of a passive gripper with MPA origami
An end-effector of the passive origami gripper from MPA origami is constructed to be attached to the manipulator’s end. The stand-alone gripper (Fig. 3L, M) is integrated with submanipulating facets to stow the gripper facets in the flat-folded state (Supplementary Fig. S3 and Fig. 6A, B). For the gripper part, the middle facets (oo’c’dc) of the gripper are altered into a pentagon (Ω < 180 deg) to avoid the kinematic singularity of the sub-manipulator of the end effector (Supplementary Fig. S3). However, the pentagon-facet design can cause incompatibility between the flat-folded and deployed states; the line oao’ cannot become the straight line at the deployed state under the assumption of rigid facets. In this work, Ω is chosen to be 140º, and the estimated incompatibility of length
Results
Experiment for trigger and grasping loads
The experiments were conducted to verify our modeling with three design parameters: 

The effects of three values for each parameter were investigated: {0.8, 1.0, 1.2} for
Figure 4E–G compares the predicted values presented in Figure 2E and the experimental results. According to Figure 4E, the grasping moment tends to increase as the free lengths of “spring 1” and “spring 2” (
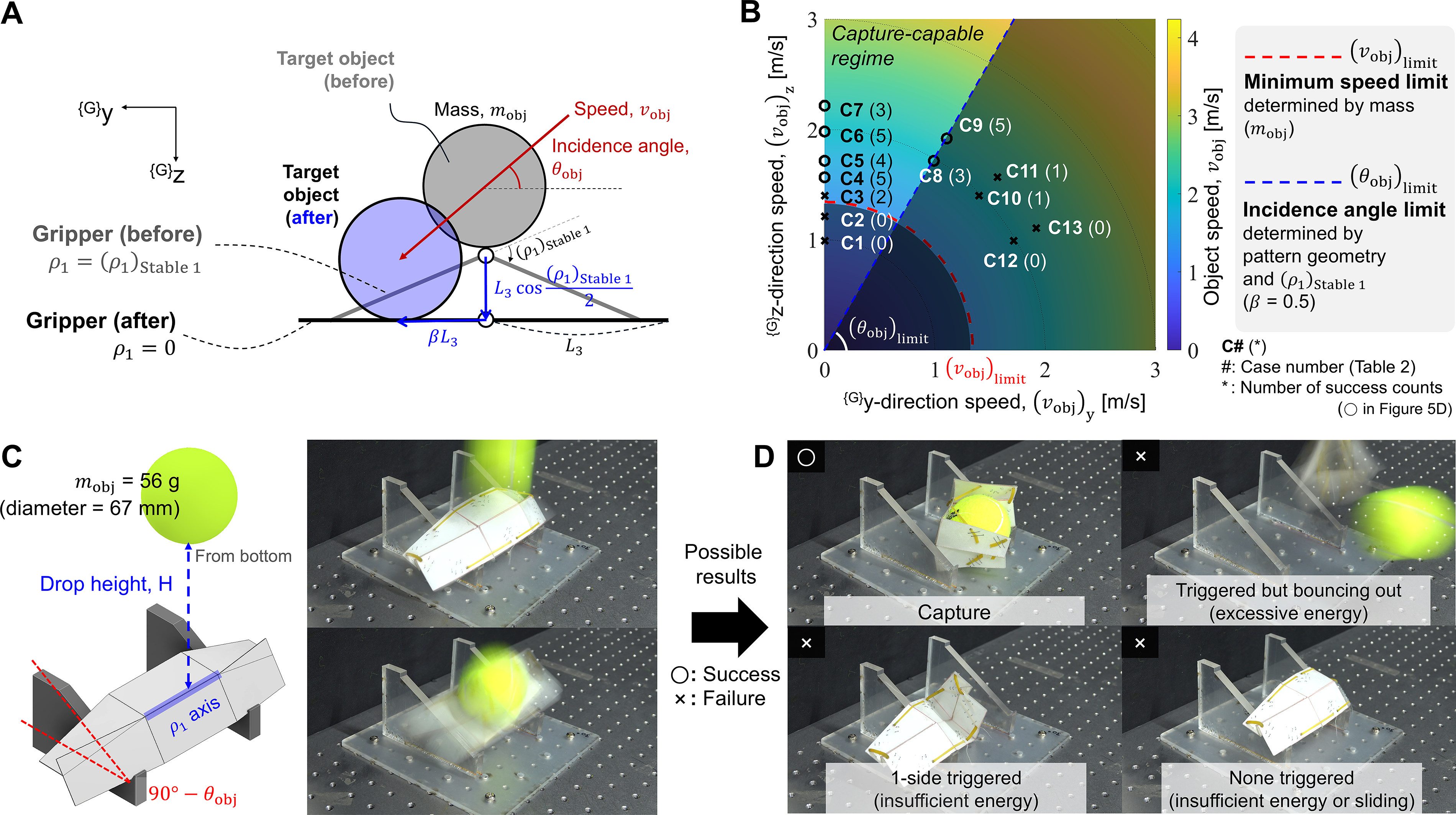
Capture characterization
The other factor is estimating the trigger-capable range of the target object’s motion. The acceptable momentum is estimated from the object velocity and folded configuration at the first stable state (“ii” in Fig. 1H). Assuming the object contacts the gripper’s 
In addition, the minimum speed limit 
Trigger experiment on incidence velocity
Drop tests with a standard tennis ball (mass and diameter of 56 g and 67 mm) were conducted. The gripper configuration was set to
Results of the Drop Tests with Respect to Drop Height and Incidence Angle
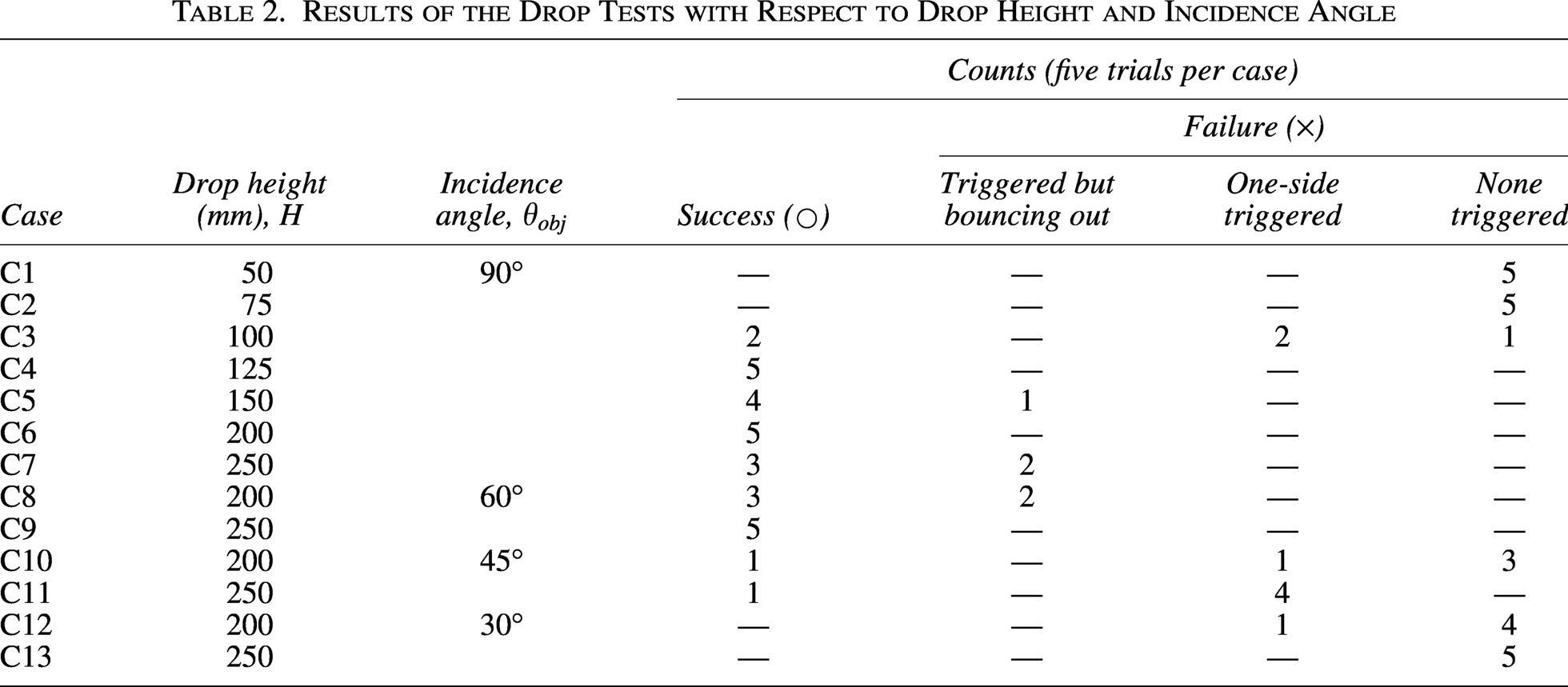
To investigate the speed and incidence angle of the target object, drop height and angle of inclination are assigned, respectively. A drop height, H, produces the object’s speed (
Figure 5B,D and Table 2 show the results of the drop tests. Success was counted when both trigger and capture occurred (○), while failures included cases where the object bounced out or was only partially triggered (×) (Supplementary Movie S7). For
In the other cases of
Demonstration
Demonstration of a flat-foldable pop-up catcher
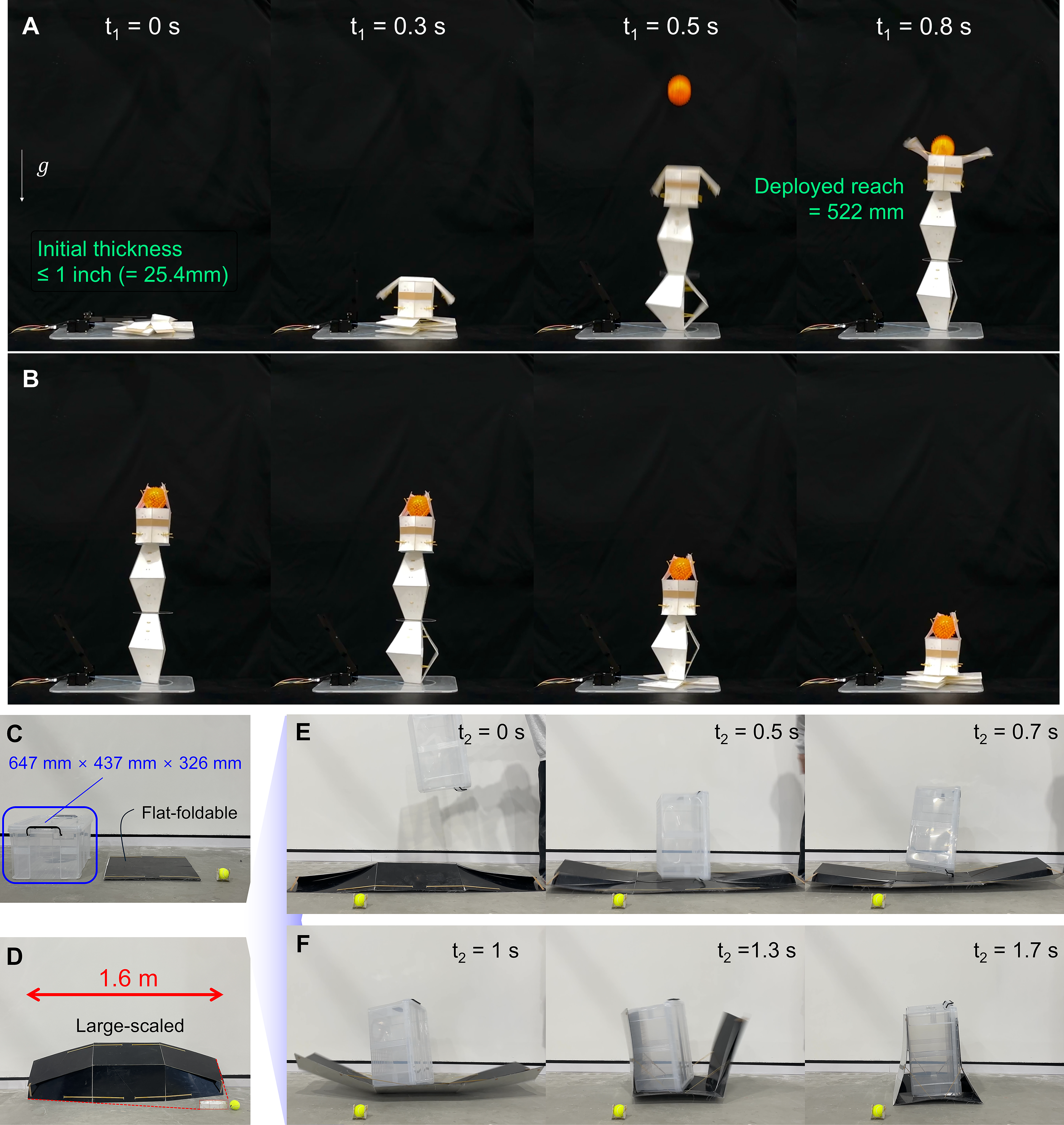
The integrated catcher system includes an end-effector from the MPA origami gripper and the Sarrus origami-based manipulator, and its stowed thickness is 1 inch (≈ 25 mm) (Fig. 6). The origami gripper shown in Figure 3L, M is extended into an end effector (Fig. 6A, B and Supplementary Fig. S3). For the flat-foldable manipulator origami, Sarrus origami, which has been adopted for simple deployment and actuation in various works, is adopted,44–47 and a three-leg parallel Sarrus mechanism, with three revolute joints in each leg, is used in this demonstration. 47 The pop-up deployment is achieved through pre-strains of springs installed on both the end effector and manipulator (Supplementary Fig. S3).
The integrated origami system serves two functions: triggering and retrieving the manipulator. The trigger maintains the flat-folded state with compression, whereas the motor rewinds the wire to retract the manipulator. The pop-up system can be stowed into a 1-inch thickness at the flat folded state and reach 522 mm at the deployed state, yielding a compression-to-extension ratio of 21 (Fig. 6). This pop-up origami catcher can catch floating objects with tunable bistability. The system successfully catches a 33.6 g falling ball and retracts by folding the manipulator flat (Fig. 7). Besides upward capture, the system can also catch objects in downward and sideward directions, allowing flexibility in various scenarios (Supplementary Fig. S4 and Movie S8).
Demonstrations of capture tests of a robotic application (Fig. 6) and a large-scale origami.
Demonstration of a large-scale origami
Exploiting the nature of rigid origami, our flat-foldable origami gripper can be scaled up geometrically (Fig. 7C–F). The large-scale origami is fabricated using the method in Figure 3D, with a flexible fabric layer (0.15 mm thickness) and 10 mm inter-facet gap for near-zero-stiffness fold lines; acrylic facets for up sides, and PETG facets for bottom sides. The design configuration [
In this demonstration, a plastic box (an inner volume of 60 L; an outer size of 647 mm × 437 mm × 326 mm) is captured by the large-scale gripper (Fig. 7C). The span length reaches 1.6 m in the capture-ready (stable 1) state (Fig. 7D). When the box was dropped onto the gripper, it induced the gripper’s
According to equation (32) and given properties, the activation energy for snap through can be derived under the rigid origami assumption. The activation energy is estimated at 4.8 J, and the estimated gravitational energy of the target box is approximately (3.0 kg) (9.81 m/s2) (0.62 m) = 17.6 J. The amount of energy applied is enough to deploy the larger gripper into a flat unfolded state and induce the snap through. However, grasping behavior could become slower or suspended because of the larger inertia from increased geometric dimensions; the degradation can be compensated by the gravity-compensation systems or environments and stiff yet lightweight facets.
Discussion
In this study, we introduced a pop-up catcher capable of transitioning through multiple states: flat folded, capture ready, and captured. By designing the potential energy landscape and using transition path planning, we successfully addressed the multipath issue: a compatibility issue between flat foldability and bistability. Our demonstration showcased the capabilities of the flat-foldable pop-up catcher, achieving a 21:1 extension-to-compression ratio and capturing objects within 0.8 s. Furthermore, scalability was validated through a meter-scale gripper capable of capturing a 60 L box object.
Another aspect worth highlighting is the design philosophy aligned with embodied intelligence. Passive actuation can be viewed as a form of structural programming in which the mechanical structure itself encodes specific responses to external stimuli. This approach enables the distribution of control responsibilities between the mechanical body and electronic systems, potentially leading to more efficient overall system architectures. Such embodied design principles could offer substantial advantages, especially in scenarios where form factor, weight, or the feasibility of electromagnetic actuation is severely constrained. Although not fully explored in this work, the proposed energy landscape-based design methodology for passive actuation holds promise for integration with structural damping, nonlinear elasticity, and dynamic response characteristics. These integrations could extend the structural programming capacity and enable the design of more sophisticated passive systems that respond in diverse ways to external interactions.
However, several points of discussion about improving our gripper for future study exist. The first is the recovery mechanism from the capture-finished to the capture-ready state. The gripper can be passively actuated once unless forced recovery is needed. Adding an active actuator, such as a cable-driven system, could handle failure risks, such as activation energy scarcity or grasping failure, but it increases the system’s weight.
The second topic is expandability with manipulators. In this study, our pop-up catcher system adopted the Sarrus origami, prioritizing the extremely thin thickness. Although the manipulator origami deploys in one direction, it can be used in mobile systems, such as aerial vehicles, which can adjust position and attitude. Using versatile manipulators with high DoF and extra actuators could expand the mission workspace and diversity.
The other topic is about the optimization of grasping performance. General performances, especially equivalent moment and normal force, were investigated because rigid-origami analysis provides the estimation of the common structural characteristics. However, grasping capability can be additionally strengthened by practical considerations: inertia, elasticity, texture of facets, spring model, and contact dynamics, which could affect the potential energy of origami.
We believe that transition path planning is beneficial for designing passively actuated origami-inspired mechanics and robots to mitigate the risk of deployment or actuation failures. This planning process can also alleviate system burdens and complexity in various passive origami systems requiring multistep passive actuations in the fields of transformable or deployable robotic applications.
Data Availability Statement
All data needed to evaluate the conclusions are included in the main text or Supplementary Data.
Authors’ Contributions
S.J.L. contributed to conceptualization, analysis, fabrication, experiments, and manuscript writing and revision. J.H.J. contributed to conceptualization, experiments, and manuscript writing and revision. J.H.R. contributed to manuscript writing and revision. D.Y.L. contributed to conceptualization, analysis, and manuscript writing and revision.
Footnotes
Author Disclosure Statement
No competing financial interests exist.
Funding Information
This work was supported by the National Research Foundation of Korea (NRF) grant funded by the Korea government (MSIT) (No. RS-2025-02213804); the NRF grant funded by the Korea government (MSIT) (No. 2022R1C1C1003718); the InnoCORE program of the Ministry of Science and ICT(No. N10250155); the BK21 FOUR Program of NRF grant funded by the Ministry of Education.
Supplemental Material
Supplemental Material
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.