
Abstract
Shape memory alloys (SMAs) or shape memory polymers (SMPs) enable soft actuators to achieve advanced adaptabilities applied in soft robotics. However, actuators that combine multiple shape memory materials struggle to achieve complex deformation effects and stiffness variations with effective control strategies. To achieve controllable, shape adaptation, and programmed deforming behavior, this study proposes an integrated control strategy for an SMA–SMP based programmable morphing structure used as an actuator in soft robotics. To achieve precise control over programming deformations and stiffness variation, a multi-target thermal sensing method (MTTSM) was proposed, integrated into an interaction-driven control framework. Based on MTTSM, the coordinated actuation between the SMA springs and the SMP structure is realized, enabling standby of preheating, stepping with programmed deformations, and dynamic stiffness changes. In addition, to achieve dynamic monitoring of deformed states, the co-training-based monitoring system is developed for collaboration, enabling the use of multisensor fusion for position estimation in the absence of end-effectors that can directly measure the deformed structure of the flexible body. In conclusion, the proposed integration strategy of MTTSM and the cotraining monitoring system offers a control solution for integrating multiple shape memory materials into morphing structures as smart actuators applied to soft robotic applications.
Keywords
Introduction
Soft robots have emerged as a transformative class of robotic systems, distinguished by their superior flexibility, adaptability, and ability to safely interact with complex, unpredictable, and dynamic environments.1,2 These capabilities always rely on morphing structures, which can reversibly alter their shape, stiffness, or geometry in response to environmental stimuli or programmed control. 3 Morphing structures serve as the foundation of mechanically intelligent systems, enabling self-actuation and adaptive motion, which are the key characteristics of advanced soft robotic applications.4,5 Mechanically intelligent systems can be advanced through morphing structures that utilize the material responsiveness of smart materials to external stimuli such as electrical, magnetic, optical, thermal, humidity, or chemical reactions, enabling controllable and reversible deformations.6–10 To fully exhibit the potential of smart materials, the precise control strategies need to be integrated into the system to ensure adaptive and coordinated responses. The synergy between stimuli–responsive materials, morphing structures, and intelligent control thus provides a complete framework for advancing soft robotic technologies across diverse applications such as precision manufacturing, 11 underwater exploration, 12 and specialized gripping. 13
Shape memory materials (SMMs) are a class of smart materials known for their ability to recover a predefined shape after significant deformation when exposed to external stimuli such as heat or stress. 14 Among them, shape memory alloys (SMAs) have been widely used as soft actuators because they are easy to apply and can produce strong mechanical output. For example, a bionic jellyfish robot using SMA elements was developed to generate a contraction–recovery motion, 15 and Kakubari et al. used strip-shaped SMA to control two silicone chambers and created an artificial sphincter capable of precise deformation control. 16 In addition, SMA-based continuum systems, including bending trunks, tentacle-like manipulators, and soft multi-segment limbs, have further broadened the applications of SMA actuation in soft robotics. Sun and Gu developed an elephant-trunk-inspired continuum robot actuated by coordinated cable and SMA spring mechanisms to achieve multi-directional bending, 17 while McCaffrey et al. designed a caterpillar-liked soft robot powered by wireless SMA coils to enable untethered crawling locomotion. 18 Similarly, Das et al. introduced an anthropomorphic continuum neck driven by multipennate SMA springs, facilitating anatomically inspired multiple bending configurations. 19 Moreover, SMA spring actuation has also been implemented in wearable continuum-type systems, such as a soft bionic elbow exoskeleton driven by SMA springs to support human joint motion. 20 Although SMAs provide clear and predictable mechanical behavior during their phase transitions, their designs are often constrained to fixed deformation patterns and lack adjustable stiffness, limiting their adaptability in dynamic environments. Shape memory polymers (SMPs) have also been widely studied because of their light weight, good biocompatibility, and ease of processing. Liu et al. developed a small soft robot with four limbs made from multilayer SMPs, showing potential for biomedical applications. 21 Son et al. designed an adhesive gripper with a bonding strength greater than two atmospheric pressures by using the reversible dry adhesion of an SMP-based actuator. 22 SMPs offer high flexibility and tunable stiffness but cannot generate motion by themselves, which limits their ability to act as the main actuating component in adaptive robotic designs. Therefore, the integration of SMAs and SMPs is essential to achieve advanced performance in soft robotic systems.
Control strategies for SMA-based soft robots have evolved considerably in recent years to address the nonlinearities and temperature-dependent behavior of SMAs. One widely studied approach is self-sensing, in which the SMA’s electrical resistance is used as a feedback signal for displacement or strain estimation. Li et al. presented a sensing–actuation integrated SMA actuator employing resistance-based self-sensing combined with Proportional-Integral-Derivative (PID) control for accurate displacement tracking in compact intelligent systems. 23 In addition, model-based control, which relies on constitutive models of SMA thermomechanical behavior to predict and regulate actuation, have been applied to SMA-based robotic systems. Hu et al. used the Duhem model for a bias-loaded SMA spring actuator and paired it with a PID controller to control the position of the actuator. 24 Mandolino et al. developed a hybrid model for single-crystal SMA wire actuators by reformulating the Müller–Achenbach–Seelecke (MAS) model, providing a physically accurate description of the SMA’s hysteretic behavior. 25 Although model-based control strategies offer significant predictive capability and facilitate compensation of nonlinear and hysteretic dynamics, they depend heavily on accurate parameter identification and can impose substantial computational demands in real-time control applications. 26
To fully illustrate the potential of SMAs and SMPs in such systems, appropriate control strategies are required to coordinate their thermally driven responses. Traditionally, SMMs-based soft robot control has focused on adjusting individual actuators. For instance, Thakor et al. utilized Peltier elements with PID control to achieve precise local temperature adjustments. 27 When applying thermally sensitive SMMs in morphing structures to realize tailored deformations, the design of the thermal management system becomes critical. Controller logic must monitor the temperature of SMAs or SMPs to define safe operating conditions and prevent overheating, which could lead to loss of shape memory properties. 28 Furthermore, the compliance of soft robots limits the applicability of conventional rigid sensors, such as encoders or strain gauges, making non-contact sensing methods and soft sensors more suitable. 29 However, when multiple SMAs and SMPs are used together in a hybrid morphing structure, the resulting nonlinear thermomechanical coupling makes the kinematic behavior difficult to model accurately. The complexity restricts the ability to predict deformation responses with sufficient accuracy, thereby limiting the implementation of dependable closed-loop control. Therefore, effective prediction and sensing strategies are essential to achieve robust and adaptive control of multi-SMM morphing systems.
Advances in sensing technologies for soft robots have significantly improved both thermal management and posture detection. While early studies used thermocouples to monitor the temperature of SMA wires, 30 noncontact tools such as infrared sensors and thermal imagers are now widely adopted, enabling precise spatial temperature mapping for localized thermal control. To move beyond single-function, open-loop systems, closed-loop control strategies are increasingly employed, allowing real-time adjustments based on actuator feedback.31–33 Simultaneously, posture detection has progressed through the integration of sensing and actuation, enabling enhanced responsiveness and adaptability. This integration is achieved through methods such as surface-mounted sensors, embedded internal sensors, and feedback-driven closed-loop systems. 34 Nonetheless, integrating multiple sensing modalities tailored to a uniquely designed morphing structure remains challenging, particularly when coordinating multiple SMMs with different thermal responses.
To address these challenges, this study proposes an integration system for an SMA–SMP-based programmable morphing structure, as shown in Figure 1. The structure primarily consists of a SMP-based cylinder in the center, surrounded by SMA springs. In contrast to previous hybrid actuators, the proposed design enables a programmable morphing process that unifies deformation, stiffness changing, shape locking, and recovery within a single structure. This capability is achieved by a novel coordinated thermal management and control integration system. The proposed integration system is composed of a multi-targets thermal sensing method (MTTSM) and the matching posture detection strategy, enabling the actuator-oriented control and monitoring, the bending performance dynamically. In this study, MTTSM fuses commercial thermal sensors with an unsupervised learning framework to predict the real-time temperature distribution of multiple target regions with physical interpretability. This enables precise thermal coordination between SMAs and the SMP core, ensuring accurate control of actuation and stiffness transitions. To complement the control process, we introduce a co-training-based posture detection strategy to reduce sensing uncertainty and provide accurate deformation. The proposed strategy uses multi-sensor fusion to perform deformation prediction without requiring an explicit physical model, allowing reliable posture estimation under varying material behaviors. Together, MTTSM and the co-training posture detection process support simple on–off control of individual SMA springs while enabling immediate start–stop responses and stiffness variation among multiple bending configurations. This integration facilitated programmable deformation and shape locking at any moment, which clearly demonstrates the potential of combining multiple SMMs for intelligent structural morphing.
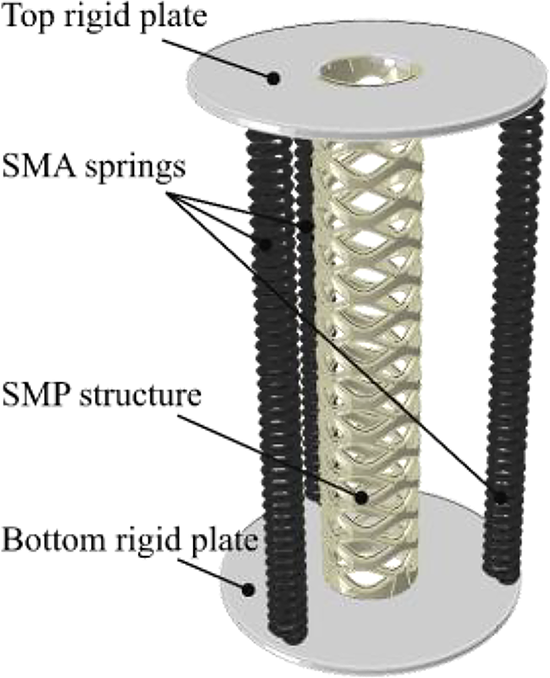
Schematic of the programmable morphing structure.
Methodology
Multi-targets thermal sensing method
In this study, an infrared thermal imaging sensor array is employed as the thermal measurement system. The sensor provides a 32 × 24 temperature matrix at each sampling point, yielding 768 temperature readings per frame. While this resolution is sufficient for capturing the global temperature distribution, it remains inadequate for accurately estimating the temperature of a localized region of interest. Moreover, each measurement point integrates temperature information across multiple layers of the material and thus cannot be directly used for statistical computations or closed-loop temperature regulation. Based on the cubic interpolation,
35
more obvious grid-like distributions of the sensing area will be obtained. Then, the K-means clustering algorithm, an unsupervised learning method, is utilized to partition the data into Km distinct clusters based on inherent similarities. The algorithm operates solely on the statistical relationships among the features and the chosen value of Km.
36
The first step of Km -means involves initializing the cluster centroids by randomly selecting Km data points from the temperature matrix and using their values as the initial centroids. In the second step, the Euclidean distance for each data point xi to each centroid cj is calculated using Equation (1), and each point is assigned to the cluster with the shortest distance.
Then, the third step updates the centroids: the mean of all temperature values within each cluster cj is computed utilizing Equation (2), and this mean becomes the new centroid for the corresponding cluster.
Finally, the second and third steps are repeated iteratively until the centroids converge and no longer exhibit significant changes. Mathematically, this process aims to minimize the sum of squared errors (SSE), as represented by Equation (3).
According to the meta-structure of the SMP and the heating process, the MTTSM is proposed based on the extraction process. The main sensing area is divided into five areas to detect the different zones. The first target region corresponds to areas where the PI heater group is exposed, with its average temperature termed the first target temperature. The second target region represents the outer surface, influenced by cylinder thickness and heat transfer, and its mean temperature is the second target temperature. Additional third to fifth areas express the cylindrical area with thermal inaccuracies for geometric factors, the radiation area capturing heat dissipation, and the background. The primary regions, including the first and second target regions, establish a cross-sectional temperature range from first target temperature (maximum temperature in SMP) to second target temperature (minimum temperature in SMP). As a result, the SMP with varying thicknesses in the cylinder’s cross section can be regarded as being at a temperature between the two target values.
Co-training position prediction algorithm
Co-training is a widely used semi-supervised learning technique that leverages multiple learners to improve classification accuracy by making use of both labeled and unlabeled data. The core idea of co-training is based on exploiting two distinct views of the data, each providing complementary and independent information that can enhance the overall performance of the model.37,38 When these views meet certain conditions, specifically, being sufficiently diverse and informative, the method allows each learner to iteratively label unlabeled samples for the other, thereby refining the classification process.
A defining characteristic of co-training is its mechanism of two views, where the feature set is split into two subsets that are assumed to be both informative and conditionally independent. 39 The process involves each learner training on one view and then predicting labels for the unlabeled data, which are then used to augment the training set of the other learner. Through multiple iterations, the model’s predictive capabilities are gradually enhanced. 40 Advantages of co-training include its ability to achieve high classification accuracy even when only a small portion of the dataset is labeled. This makes it particularly valuable in domains where labeled data are scarce or expensive to obtain. 39 Furthermore, the method leverages the complementary strengths of each view, facilitating a more robust and generalizable learning process that compensates for the weaknesses of individual classifiers. 38
Experiments Setup
The control system for the morphing structure is designed to function within five distinct operational modes, each serving a unique role in adapting the structure to varying tasks. The control system manages the transition between modes seamlessly by continuously monitoring sensor data and user commands, adjusting the system’s behavior as needed. SMA springs are actuated using a simple on–off control scheme to meet the actuation requirements without closed-loop regulation. In contrast, the SMP component requires precise thermal management, thus, we implemented a PI closed-loop temperature controller specifically for the SMP. This design approach ensures overall system simplicity and efficiency while maintaining reliable performance.
Shown in Figure 2, upon system activation and initialization, the control logic enters one of these five modes, including standby, small stepping, large stepping, forming, and recovery modes. Experiments were conducted to verify all functions and evaluate the bending performances of hybrid structure.
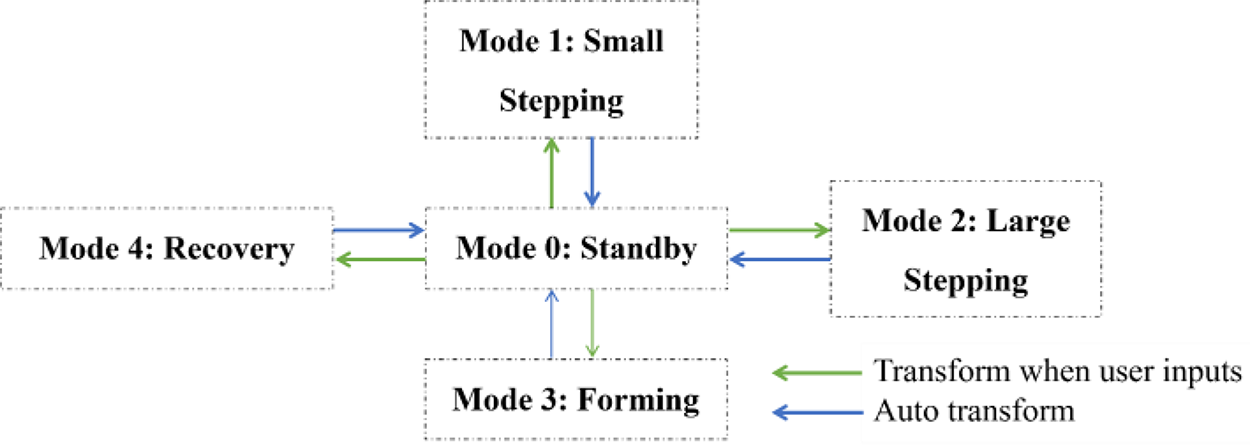
Five modes of the control system and their transformation relationships.
The SMP cylinder was produced using a Builder EXTREME 1500 PRO 3D printer with polylactic acid filament. The SMA springs were made from a Nickel–Titanium (Ni–Ti) alloy with a wire diameter of 2.3 mm, which has minimal decomposition tendencies, and were trained using the TWSME process. 41 The springs are designed to contract to 100 mm when heated and extend to 200 mm upon cooling. The upper and lower circular connectors, which secure the actuators, were laser cut from 3 mm-thick PMMA plates. As for the sensing component, the MLX90640 infrared thermal imaging sensor array is utilized, which provides a 32 × 24 temperature matrix considering ambient temperature. 42
The connection of different control and sensing components is shown in Figure 3a. The SMA springs are directly powered and heated via Joule heating. Since SMP has poor electrical and thermal conductivity, an external heating element is required. Polyimide film heating pads (PI heaters), fabricated to match the inner surface of the SMP cylinder, were used. These heaters have very low stiffness, excellent insulation, and high thermal conductivity, and utilize thin etched stainless steel alloy sheets as heating elements. To accelerate cooling, a small fan is placed at the top of the cylinder, utilizing the air duct formed by the PI heaters. This setup also minimizes any cooling interference between the SMP and SMA. Besides, the development of the posture detection system was motivated by the need to capture continuous and dynamic bending performance in soft morphing structures. To evaluate the real-world applicability of the co-training-based recognition model, we conducted physical experiments using actual hardware. Shown in Figure 3a, an inertial measurement unit (IMU) and a depth camera were connected to the controller running a real-time position estimation algorithm. The real-time bending performance was measured by Intel RealSense D435 3D camera depth camera, and HFI-B6 IMU was used for the measurements.
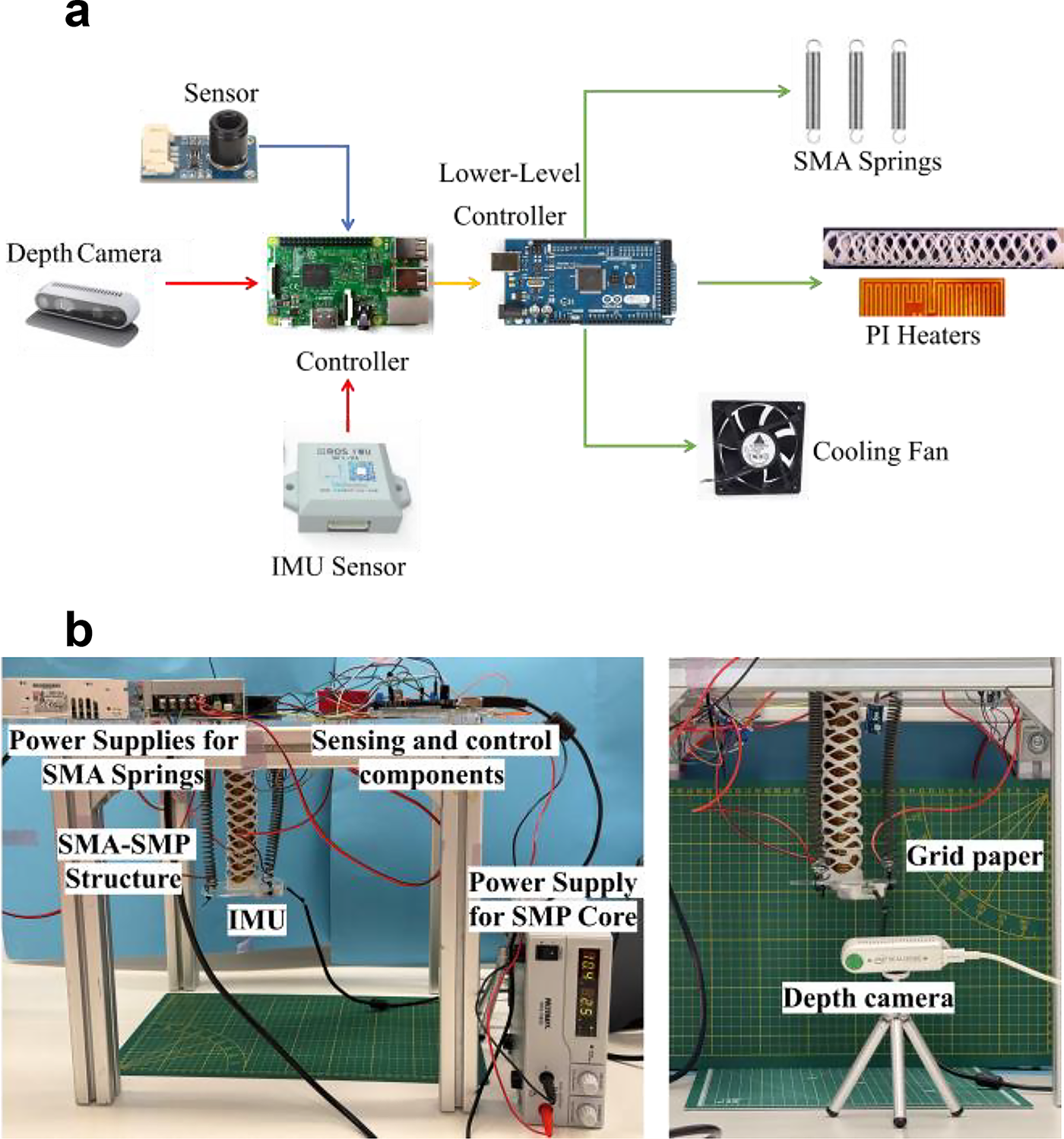
Experimental setup of the integration system for the morphing structure.
The overall experimental setup is illustrated in Figure 3b. Each SMA spring is individually powered through a switching circuit connected to a dedicated power supply with a maximum output of 5.0 V and 15.0 A. The PI heaters and cooling fans are driven by a separate power supply, capable of delivering up to 18.0 V and 10.0 A. The sensing and control units are mounted on the top section of the structure, while the IMU is positioned at the free end to capture dynamic motion data. A depth camera is aligned parallel to the IMU at a fixed distance of 350 mm to ensure consistent spatial tracking. To enhance positional accuracy, two sheets of grid paper are placed, one beneath the device and one alongside it, providing visual reference points for displacement measurements. In addition, all experiments in this study were conducted under fixed-load conditions to isolate the actuation response of the shape memory elements. Load-changing scenarios, which may introduce stress-induced shifts in transformation temperature due to the Clausius–Clapeyron effect, were not part of the present experimental design. 43 Therefore, the behaviors of the structure reflect the material response under constant external loading.
Results and Discussion
Functional verification
To verify the MTTSM, the temperature distribution of the heated SMP structure is illustrated in Figure 4a. The left panel presents the original sensor image (jet palette), the middle panel shows the result after applying cubic interpolation, and the right panel displays the identification mask. In the detection result, regions numbered 1, 2, 3, 4, and 5 correspond to the first target region, the second target region, the boundary area, the radiation area, and the background, respectively. After processing, the detection results exhibit clearly defined hierarchical regions with sharp boundaries, while comparison with the original sensor image confirms that the interpolation and masking steps do not introduce distortion. The thermal distribution contours remain well-preserved and clearly visible, enabling accurate identification of each target region.
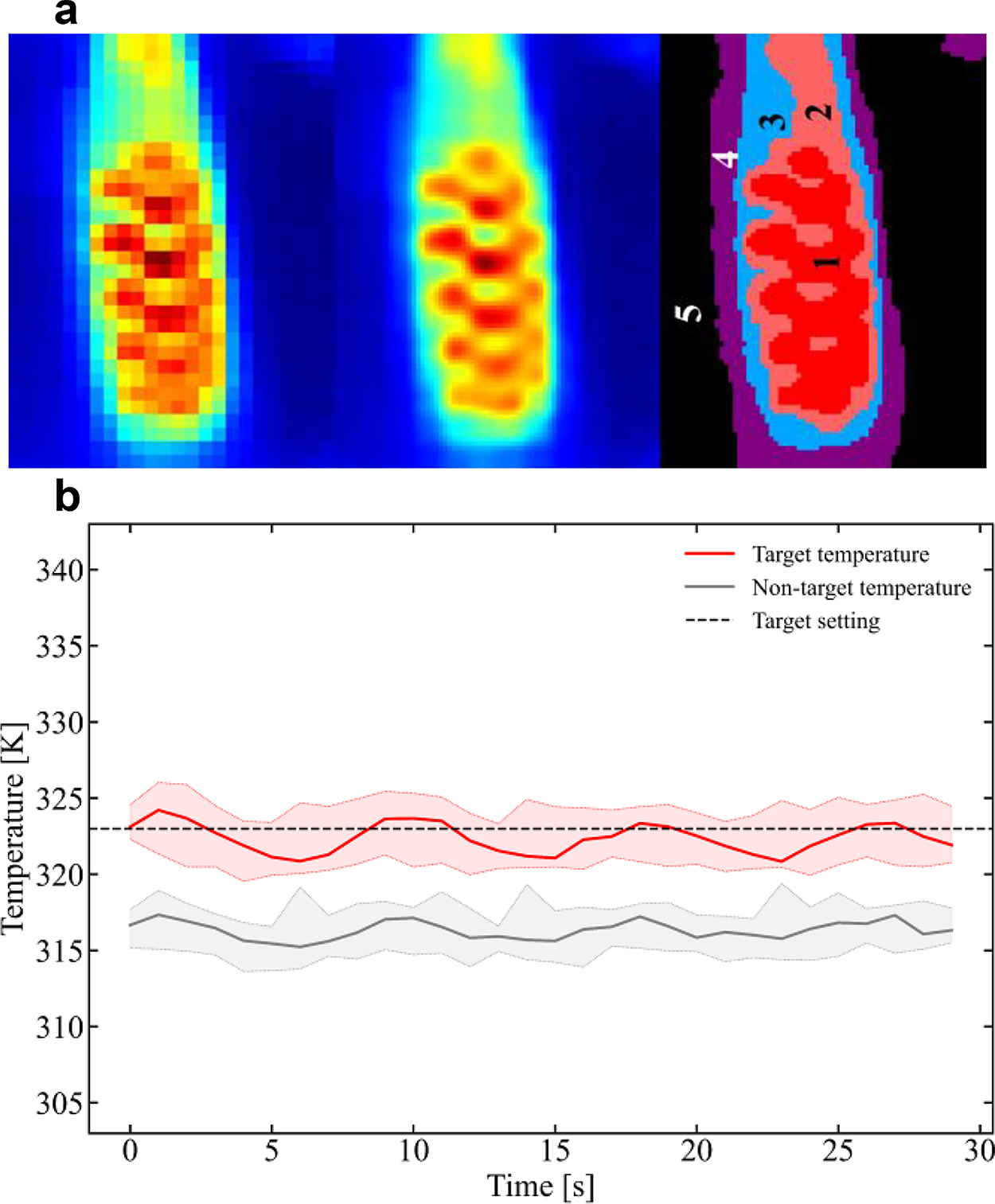
Validation of the MTTSM for the morphing structure.
Using MTTSM, the temperature monitoring curves are shown in Figure 4b. The measured temperatures closely follow the target setpoints, with deviations remaining within 0.2 over the 0–30 s interval, indicating stable and accurate measurements. The system exhibits a latency of less than 0.2 s, caused by I2C communication and Raspberry Pi processing, enabling effective real-time monitoring and control. To assess robustness, 50 repeated experiments were conducted. In Figure 4b, the red and gray lines represent the mean values of target and nontarget temperatures, respectively, while the shaded areas indicate the ranges between measured minimum and maximum temperatures, all within acceptable ranges. These results confirm that MTTSM can reliably support multi-target thermal monitoring and actuator-oriented control in real time, facilitating coordinated and programmable morphing of the structure.
Analysis of system initialization and standby mode
When the sensing system is activated, as illustrated in Figure 5a, the initialization begins. Subsequently, Mode 0 is triggered, which can also activate automatically upon the conclusion of other modes. Mode 0 manages the user interaction page to facilitate communication and preheats the SMP to a maximum temperature of 323 K. Once an available command is successfully executed, Mode 0 concludes and transitions to the designated modes. The thermal experiment results, shown in Figure 5b, indicate that reaching the target temperature from room temperature (approximately 298 K) requires about 10 s. As the process continues, temperature oscillations gradually subside. Even at their peak, the minimum temperature remains below 323 K, ensuring that the cylinder maintains high stiffness.
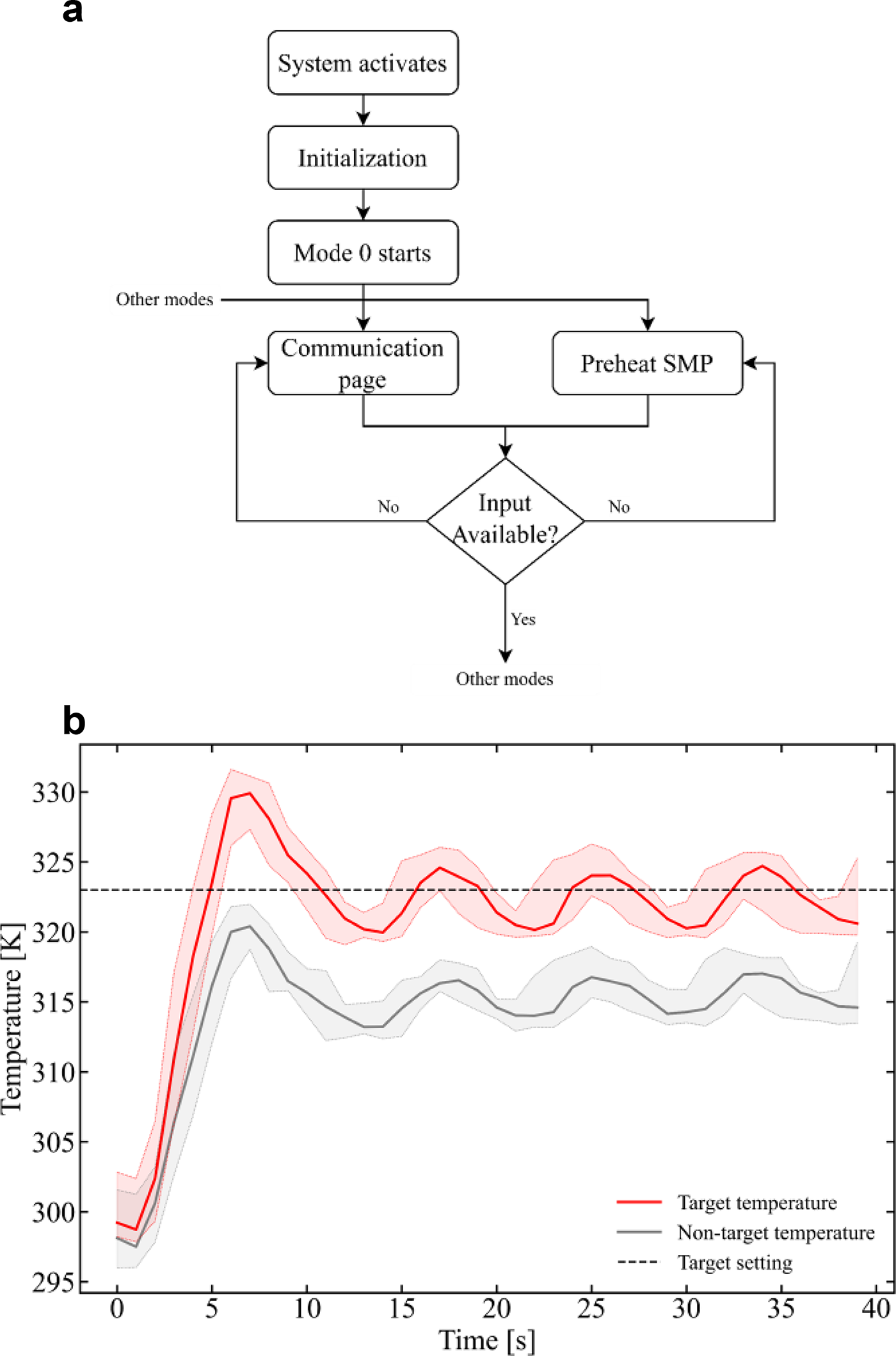
Workflow and temperature distribution of the structure in initialization and standby mode.
Analysis of working modes
During operation, the smart morphing structure undergoes three key processes: a stepping process for controlled deformation, a forming process to lock its shape through stiffness modulation, and a recovery process to restore its original configuration. These processes are coordinated by the integrated control system. In this section, each process is described in detail according to its corresponding working mode. To characterize bending behavior and stiffness variation, the bending performance and structural stiffness are evaluated by bending angle (φ) and bending stiffness (kb), respectively. 44
The stepping process is evaluated in stepping mode, as shown in Figure 6. In the stepping mode, deformation can pause at any step, allowing posture adjustments from any position without resetting to the initial state. The workflow and temperature distribution, shown in Figure 6a, begin by heating the SMP cylinder to a minimum temperature of 358 K. This ensures low stiffness across all layers, preventing resistance to bending. Once the SMP cylinder reaches the target temperature range, the specified SMA springs are sequentially activated with short intervals between steps, while the PI heaters maintain the cylinder’s temperature at approximately 358 K to ensure stability. The bending performances and stiffness variations during stepping mode are shown in Figure 6b. The full process lasts 30 s, comprising four 6-s stepping phases and three 2-s pulsing phases. The experiment was repeated three times, with the mean values presented as the reported data, and the error bars indicating the corresponding maximum and minimum values. During each 6-s stepping phase, φ gradually increases for both the double-spring and single-spring actuating configurations. However, during the 2-s pulsing phases, φ decreases by approximately 2° to 4°. The reduction occurs because, during the pulsing phase, SMA heating stops while the SMP core remains at 358 K, causing it to partially revert toward its original shape and reducing the bending angle. Although double-spring and single-spring actuations produce different bending performance during the stepping phases, their stiffness remains consistently low.
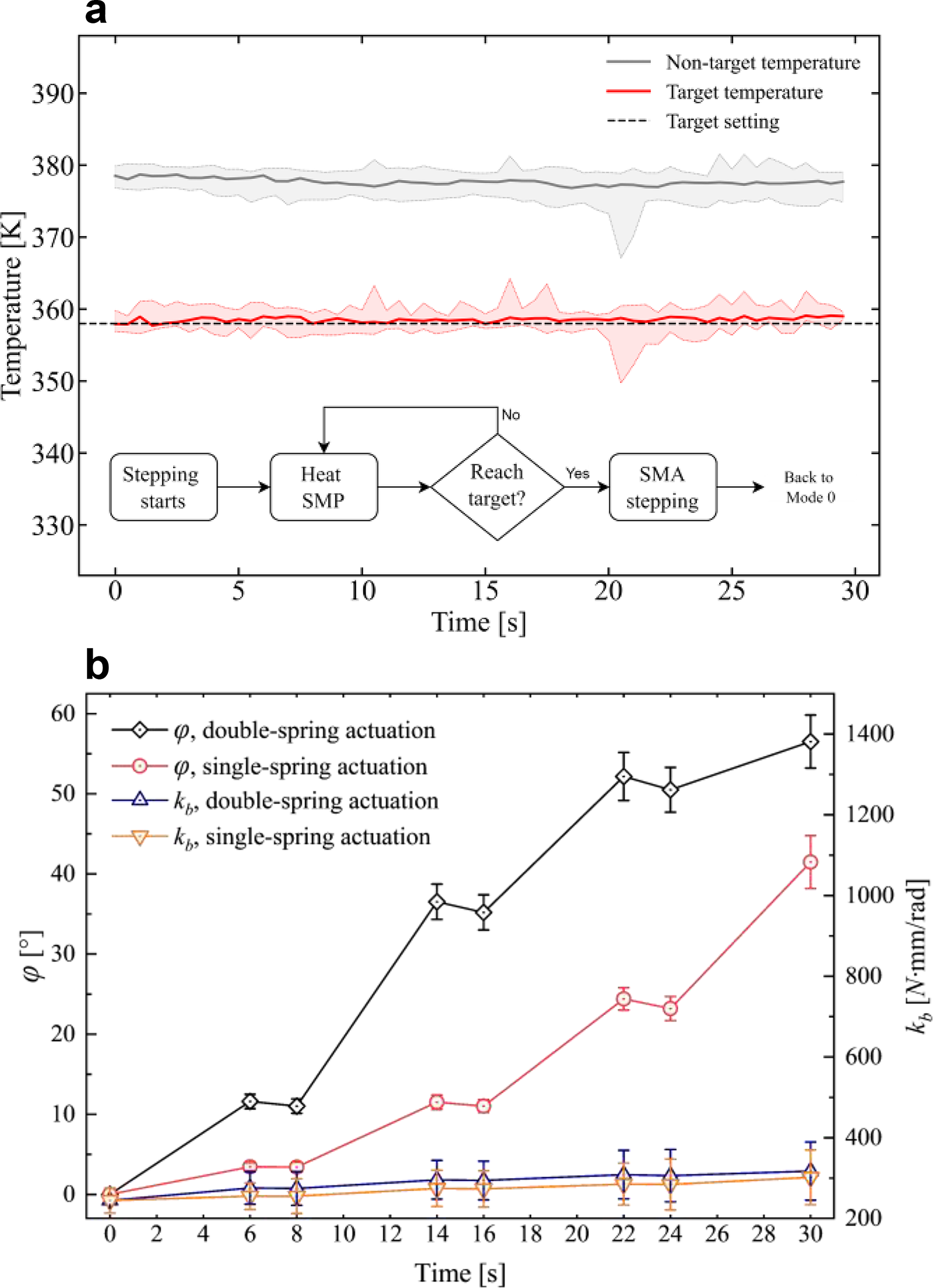
Workflow and performance of the morphing structure in stepping mode.
The forming and recovery processes are assessed using the forming and recovery modes, respectively, as shown in Figure 7. The workflow and corresponding temperature distributions are illustrated in Figure 7a. In forming mode, the SMP cylinder is cooled from a maximum temperature of 323 K, affecting both target and nontarget regions. Figure 7b shows the bending performance and stiffness variations for double-spring actuation during forming. Initially, kb is relatively low due to the heated SMP core. As the temperature gradually decreases through the transition range between 10 and 45 s, kb increases significantly. By 50 s, the kb reaches 1400 N·mm/rad, representing a 4.5-fold increase compared with heated state. Meanwhile, φ decreases slightly by 5° during the first 20 s as the SMA springs stop actuating, allowing the SMP core at elevated temperature to begin its recovery trend.
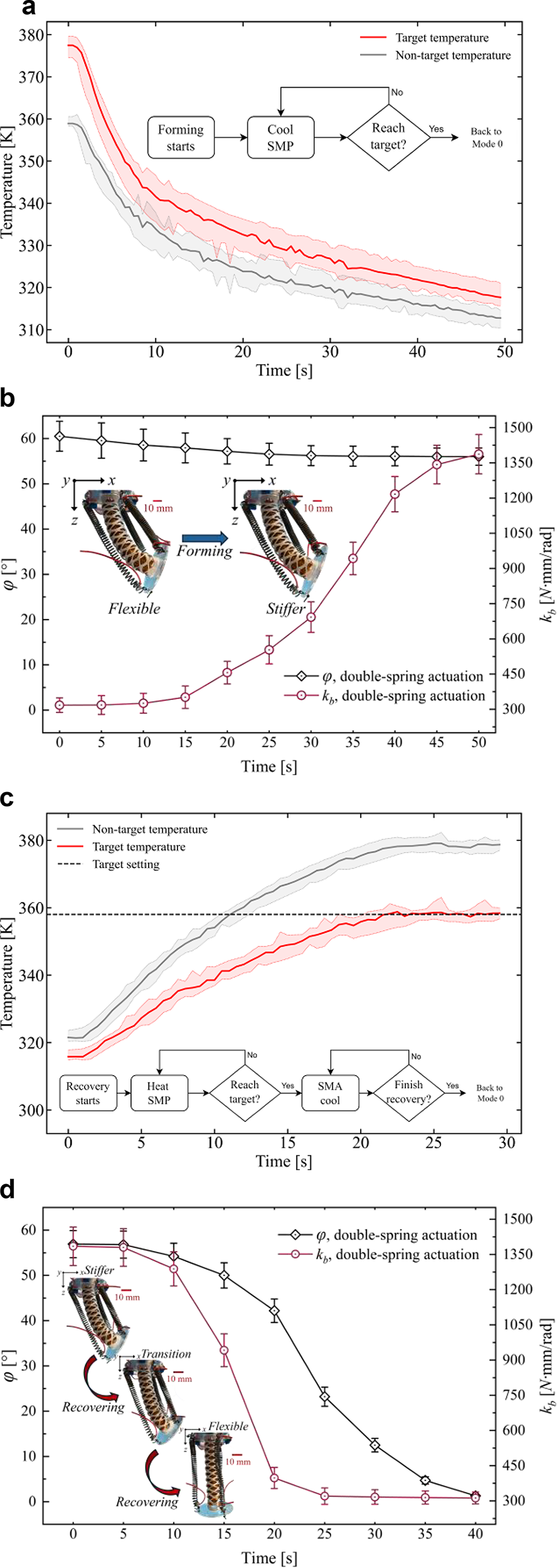
Workflow and performance of the morphing structure in forming and recovery modes.
The workflow and temperature distribution for recovery mode are shown in Figure 7c. The process begins similarly to stepping mode, with the SMP cylinder heated to 358 K over approximately 25 s. Once the target temperature is reached, a brief pulse is applied to all SMA springs to release stress-induced martensite, followed by cooling the springs back to their initial configuration at room temperature, while PI heaters maintain overall thermal stability. Figure 7d presents the bending performance and stiffness variations for double-spring actuation during recovery. In this mode, the SMA springs remain inactive. The kb decreases sharply between 5 and 20 s due to rapid heating, then stays low from 25 to 40 s while the SMP core is heated. In contrast, φ does not drop quickly but decreases gradually during the first 15 s, then declines linearly from 15 to 30 s. This delay occurs because φ responds with a lag to changes in kb, as the shape-memory effect only activates once the SMP core surpasses its transition temperature. At this point, φ begins to decrease and progressively returns to its initial configuration.
Co-Training posture detection analysis
To evaluate the feasibility and robustness of the proposed co-training method, prediction experiments were carried out for both bending angle and displacement in the double-spring and single-spring actuation modes. The predictive model employed was configured based on the optimal parameters identified during the prior sensitivity analysis. Specifically, the CNN-LSTM architecture consisted of a single convolutional layer with 128 output channels and a kernel size of 2, followed by an LSTM layer comprising 256 hidden units and a fully connected output layer tasked with predicting spatial coordinates. The KalmanNet module integrated a GRU layer with 64 hidden units and a fully connected output layer for state estimation. The dataset for training and evaluation was acquired using an IMU sensor (both accelerations and angular velocities along
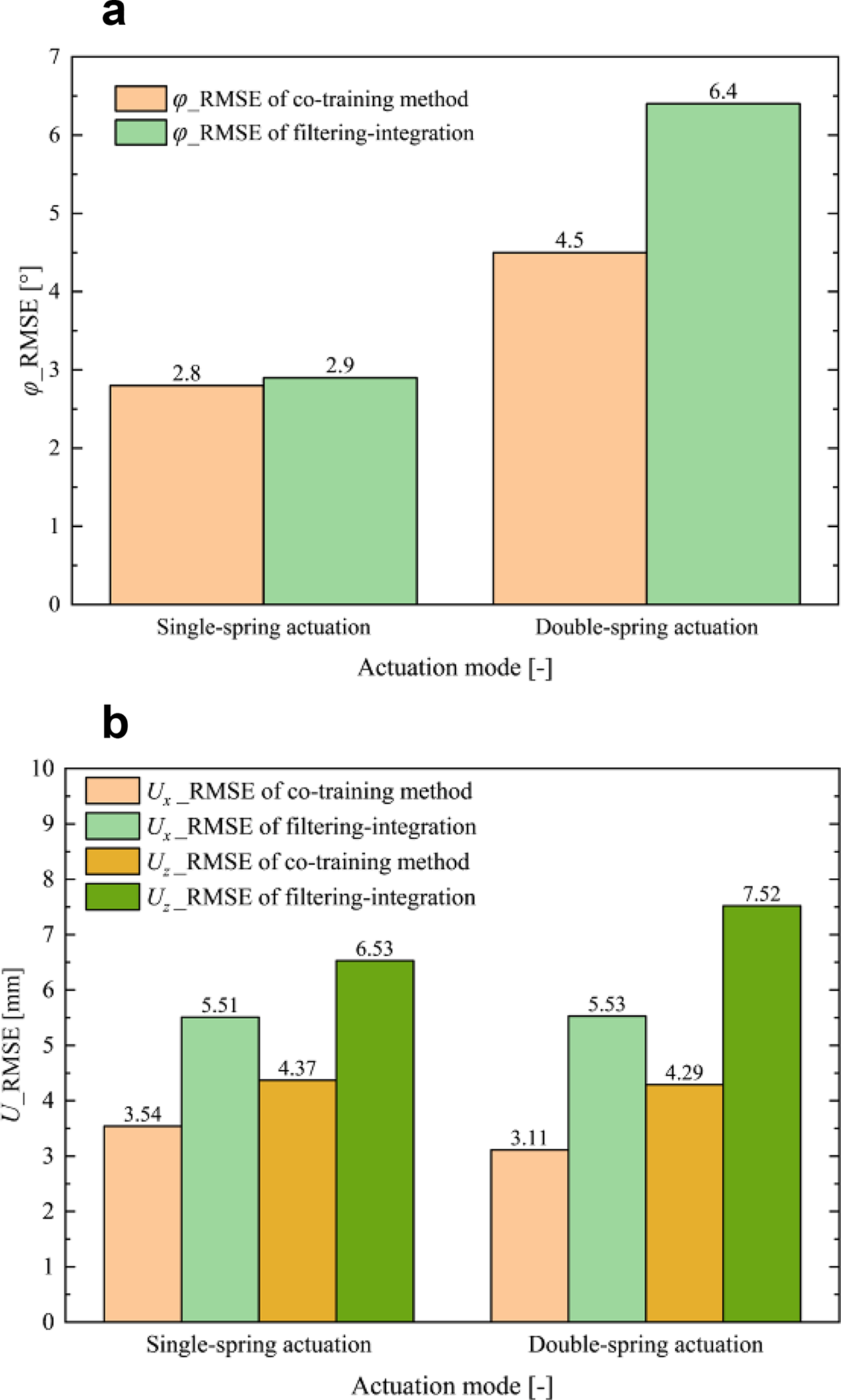
The prediction performance obtained using the two approaches is illustrated in Figure 8, with the corresponding RMSE values summarized in Figure 9. When the test noise conditions are consistent with those encountered during training, the co-training framework exhibits stable and accurate predictions for both bending performance (Fig. 8a, b) and free end displacements (Fig. 8c, d). In contrast, the filtering-integration baseline effectively suppresses high-frequency noise and alleviates short-term integration drift. However, its performance degrades over long-term sequences due to the accumulation of integration errors. As shown in Figure 9a, b, although the overall RMSE values of the two methods appear comparable, filtering-integration consistently yields higher errors, with the maximum φ_RMSE reaching 6.4°, whereas the highest value under co-training is limited to 4.5°. A similar trend is observed in displacement prediction, where the baseline attains a maximum U_RMSE of 7.52 mm, compared with only 6.53 mm for co-training. When considered alongside the prediction trends in Figure 8, these results further confirm the superior accuracy and long-term stability of the co-training method. Overall, the co-training framework demonstrates more robust performance across extended sequences of continuous actions, underscoring its suitability for hybrid morphing systems in which accurate physical models are difficult to obtain.
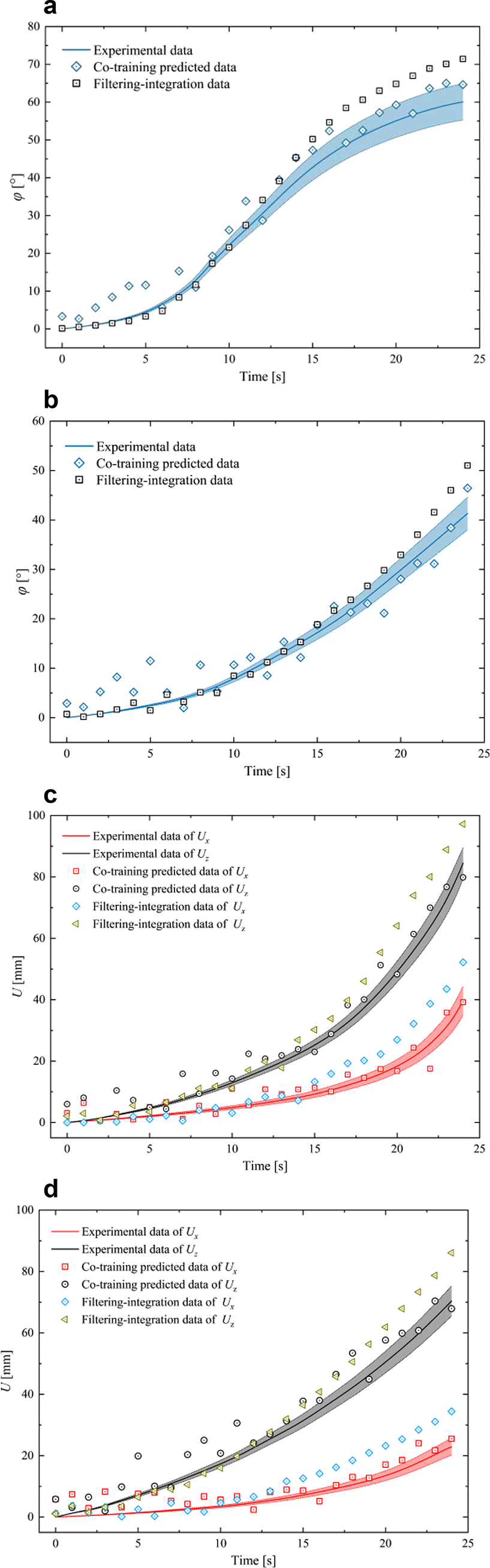
Comparison of bending performance between different predicted data and experimental results.
Comparison of RMSE values for different prediction datasets.
Nevertheless, the co-training method has certain limitations. Its prediction accuracy decreases at lower bending angles and smaller displacements, primarily due to two factors: first, fixed IMU noise introduces inaccuracies in acceleration and angular velocity measurements, affecting posture estimation precision; second, the depth camera’s recognition algorithm can suffer from reduced accuracy or delayed response under challenging conditions, such as dynamic illumination, occlusions, or reflective surfaces, especially when detecting subtle positional changes. To further improve system performance, next step is to integrate advanced sensing techniques during calibration to obtain more accurate ground-truth data, and employ higher-precision, lower-latency sensors for stereo coordinate acquisition, thereby reducing the delay-induced errors and enhancing overall estimation accuracy.
Conclusion
This study proposes an integrated design for programmable shape-morphing structures in soft robotics based on multiple thermal-sensitive SMMs. The programmability of the morphing structure is unlocked through coordinated thermal actuation and control, enabling not only continuous deformation but also selective shape locking and stiffness variation. Different configurations can be precisely locked in tailored positions by controlled thermal cycling and estimation strategy, demonstrating the structure’s capability for variable shape reconfiguration.
The rapid and consistent performance demonstrates the potential of MTTSM in integrating thermal-sensitive SMMs. Utilizing MTTSM, an integrated system was developed that supports different working modes to achieve multiple configurations. In stepping mode, the system enabled precise, stepwise actuation, completing full loading across four discrete steps. This mode allows the morphing structure to transition smoothly between shapes via thermal actuation, whether beginning from its initial state or an intermediate configuration. The forming and recovery modes facilitated shape locking and restoration, respectively, with the locked configuration achieving up to a 4.5-fold increase in bending stiffness. The recovery process exhibited minor hysteresis, taking approximately 15 s longer than stiffness reduction to fully return to the initial state.
Furthermore, a novel pose estimation framework based on a co-training approach was introduced for the hybrid structure. Compared with conventional filter-integration methods, the co-training strategy provides more accurate and stable configuration estimates, particularly in scenarios where physical modeling is challenging due to the nonlinear, time-dependent behavior of thermal-sensitive smart materials. Overall, the integrated system enhances the robustness and versatility of morphing structures based on thermal smart materials, highlighting the potential for enabling mechanically intelligent, multi-functional soft robotic systems composed of complex hybrid architectures.
Future studies will also integrate closed-loop strain feedback to enable real-time compensation for load-induced temperature shifts, thereby improving the precision of the programmable morphing structures in dynamic environments. In addition, future studies will focus on the design optimization of the morphing structure and actuators’ integration to enhance application-specific performance metrics, including payload capacity, blocked force, long-term durability, repeatability over multiple cycles, and energy efficiency.
Footnotes
Acknowledgment
The authors would like to thank for the support from Southwest Jiaotong University, and the IWS 3D printing workshop and experimental lab at Delft University of Technology.
Author Disclosure Statement
No competing financial interests exist.
Funding Information
This work is financially supported by the National Key Research and Development Program of China (Grant number: Q110225S01012).