
Abstract
The paper describes a new approach to the modeling of individual-based artificial life models based on fuzzy cognitive maps (FCMs). The proposed concept focuses on the optimization of the artificial intelligence of individuals in multi-agent models and their adaptation to an environment. The emphasis is put on the decision-making method. FCMs offer great complexity and may be extended for learning through evolutionary algorithms. However, large FCMs suffer from high computational performance issues. This paper presents the possibility of replacing the decision-making part of an FCM with the analytic hierarchy process (AHP) method, which is widely used for decision support. Some sections in FCMs are often unused or insignificant for individuals’ behavior. Since AHP needs fewer inputs to make decisions on the same set of possible actions, this approach offers lower demands but also fewer possibilities for the development of behavior. This paper describes a transformation of an FCM into a combination of both these methods (FCM-AHP) and tests strengths and weaknesses of the approaches in the artificial life model. In comparison to the larger FCM, FCM-AHP provides a model with significantly lower computational demands while keeping nearly the same proficiency. Experiments proved that FCM-AHP has 54% lower time complexity at a price of the decrease of 4.4% in the accuracy of decision-making in comparison to the original method.
Keywords
Introduction
Artificial life modeling allows us to explore real natural phenomena, emergence, and evolution within hours of runtime. Artificial individuals behave according to their needs and a situation in the vicinity. It is edifying to study emergent processes through the observation of evolving intelligent agents. Natural selection reveals the main directions of evolution and specialization of various species after several generations of agents in the simulation. In order to survive, they need to deal with changes in a dynamic environment. Therefore, their intelligence needs to be sufficiently strong. On the other hand, processing powerful intelligence usually takes more computational time. Multi-agent systems with thousands of individuals need to consider performance, especially while designing an artificial life model.
One of the basic artificial life requirements is reproduction. The ability to reproduce and multiply the genome of successful individuals emerges in evolution. Many factors are influencing the success of evolutionary adaptation, such as population size, which can grow over time. A model should allow some degree of growth without radical intervention in emergent processes; however, too large population can significantly slow down the simulation. In every time step of the model, the application needs to process the artificial intelligence model for each individual of the population. That makes population size and the chosen method of artificial intelligence key factors in the optimization of an artificial life model.
The choice of the method of artificial intelligence is vital for individuals, but its time complexity is essential for the whole model in terms of use and testing. Population size can always be lowered to adjust the model speed, but evolution in a model with low population is very unstable and limited. These objectives are in direct contradiction. Therefore, models need to find a balance between complexity and performance. Generally speaking, the faster the model, the larger the population that can be processed within a reasonable time.
The model that is the starting point of this paper features a two-dimensional randomly generated environment with resources and thousands of individuals. The autonomous individuals, driven by a fuzzy cognitive map (FCM), adapt their behavior and attributes to raise their chances of survival. The FCM handles the simulation of inner needs and decision-making, which involves processing inputs from individuals’ sensors and selecting the optimal action for the time step.
The motivation of this paper is a description of a new approach to decision-making in an artificial life model, which was briefly introduced in [19]. This paper is an extended version of the short paper. Over the original paper, it provides a theoretical background, more detailed description of design, implementation and further testing that shows the potential of the approach even outside of the artificial life model.
This approach significantly lowers computational demands with a low impact on its complexity. That provides the model with the possibility of even larger populations while keeping nearly the same simulation speed. However, the general concept of the proposed solution with the analytic hierarchy process (AHP) is applicable to any autonomous system based on FCM with decision-making.
The structure of this paper is as follows: The next section, Related work, summarizes similar projects to the artificial life model or decision-making presented in this paper. Then the sections Fuzzy cognitive maps and Analytic hierarchy process introduce the methods used in the original model and the proposed approach. The fifth section, ALModel, specifies the original model and its issues. Following Section 6 suggests the solution and describes the design of the new decision-making and the reduction of the original FCM in the ALModel. Finally, the section Experiments compares the approaches regarding the results of tests on model speed, the strength of individuals’ artificial intelligence and other phenomena of artificial life.
Related work
There are many models of artificial life based on various methods. Cell-based models are the most basic tool for studying patterns that can be seen in nature. However, they lack evolution and behavior on the level of individuals [5]. Some projects presented artificial life in the form of programs. In Avida [2], individuals compete for processor time and evolve in order to raise their chances of success. These programs are still quite far from the definition of a standard artificial living agent due to their immobility and a static environment.
Bubbleworld.Evo [22] presents a predator-prey ecosystem focused on the aspect of hunting. Predators choose prey, chase it and then eat it or choose other prey. The prey agents (“bubbles”) have even simpler behavior. They just flee away from predators, grow and multiply. In the simulation, agents’ direction and speed change gradually. Predators’ decision-making considers even this simulated momentum of agents.
Conversely, some models, such as Framsticks [14], include agents with complex behavior but lack the possibility of larger population growth due to performance demands. Framsticks’ model offers a three-dimensional world with stick representation of animals, which are trying to solve various tasks mainly based on movement in the environment. The behavior of individuals is driven by a neural network. Both their shape and behavior evolve, which allows the creation of new species with unique ways of moving. For instance, some creatures developed a movement style similar to a salamander, although this was not intended. This platform with its evolution of a neural network can also be used outside the artificial life field for general computations and optimization problems [23].
There are only a few artificial life models or ecosystem simulations based on fuzzy cognitive maps. One of them is the virtual world designed by J. A. Dickerson and B. Kosko [7], which uses FCM for the whole simulation. All interactions, actors, and environment features are provided within a single FCM. Each species has its own concept nodes, some of which are connected to the nodes of the other species. However; this approach is still quite far from the focus of this paper since it does not fulfill many aspects of the artificial life and cannot be described as an agent-based model.
EcoSim [9] is the closest to the presented project because it uses an FCM to process the behavior of individuals (agents). The simulation also includes the evolution of values in the FCM, which enables adaptation of behavior. Individuals have available just a set of basic actions, from which they choose the optimal one for a current situation. The development and behavior of the population emerge from interactions between agents. EcoSim contains two types of species (predator and prey), which both evolve to raise their chances against the rival species. The decision-making of prey and predator species differs in its actions and observed properties; therefore, newly created species always share similar behavior and the same role in the ecosystem as its ancestors. Despite the complexity of the FCM (26 nodes), behavior is focused only on reproduction and management of food and energy. Generated patterns are visually close to the cell-based models. The model aims to observe the emergence and evolution of the population rather than a realistic examination of individuals [13].
The artificial life model that is the starting point of this paper (ALModel) [18] is based on similar methods as EcoSim. The main differences are a variety of species, the complexity of the environment, and FCM design. Both EcoSim and Bubbleworld.Evo presented competition between two initial species with predefined roles (prey and predator). ALModel features general species with undefined roles in the ecosystem. It allows species adaptation to the current environment and its reorientation to another role in the ecosystem if it is convenient. That is supported by the complexity of the environment with different resources, the varying density of vegetation, and obstacles. The FCM in EcoSim contains redundancy while ALModel avoids it to lower computational demands. For instance, there is a single Fatigue concept node instead of EnergyLow and EnergyHigh. Although there are similarities with the original ALModel using only FCMs, nothing similar to the proposed approach (FCM-AHP) has been implemented in any of mentioned models.
Outside the artificial life field, there are a few projects that include the same unusual combination of methods as this paper proposes. However, they are mostly focused on decision-making support in management [3,24] or prediction of complex dynamic systems [4]. None uses this combination to process artificial intelligence in agent-based models. These projects mostly focus on the design of a model and its result (a single decision or prediction); therefore, computational complexity is not as a relevant issue for this field as it is for large-scale multi-agent models.
Fuzzy cognitive maps
The original model and the proposed solution both use a fuzzy cognitive map (FCM). This method serves as a dynamic system of nodes with a complex network of relations. The system changes through iterations (time steps) according to its setting of relations. Often, it is used for predictions of systems that are too complex or have too many dependent variables [8,10]. Also, some autonomous systems use it for decision tasks, navigation [11,16] or even simulation of emotions [1].
To understand the strengths and weaknesses of this method regarding time complexity, its components and computation should be clarified. An FCM is based on a collection of concept nodes and relations between these nodes. Matrix R in Eq. (1) shows a general representation of an FCM as the matrix of relations between n concept nodes [15].
Each value
Besides matrix R, an FCM needs truth values of nodes. These values form vector
Computation of an FCM uses
In both equations, activation function f represents a transformation of values from the calculation. There are many various types of nonlinear functions (sigmoid, hyperbolic, step and so on). The primary task for the function is keeping values in the fuzzy range. The model described in this paper mostly uses simple linear transformation unless a value exceeds the range (see Eqs (5), (6), (7)).
Since the computation of an FCM is matrix multiplication of one
The enhanced FCM for autonomous agents that ALModel uses is a more complex version with three different classes of nodes. However, it does not affect performance, because it only slightly changes the way of computing some nodes and the order of calculations. Therefore, the general equations are sufficient for the purposes of this paper.
Analytic hierarchy process
In the solution proposed in this paper, the AHP method occurs in combination with an FCM. AHP and many of its modifications are often used for decision-making support in management [25]. This method divides a problem into components (criteria), which allows better insight into the problem. Therefore, a responsible person can decide which alternative is optimal for the current situation with low risk of a wrong decision [12].
The proposed model does not use multiple layers of criteria; therefore, the following description omits the process of creating multilayered criteria and focuses on the decision-making process and performance-related issues.
The first step is an identification of criteria and possible solutions (alternatives). After that, all alternatives have to be evaluated according to all criteria (see Table 1) [21]. These evaluations form matrix E.
Value
Vector C contains weights of criteria, which represent the importance of evaluations by the corresponding criterion. Weight values also range from 0 to 1. Moreover, their sum should equal 1. Both input sets of values have a constant size, but their content varies depending on the current situation. The values of output vector A are evaluations of activities for the current decision. A higher value means the corresponding activity is more suitable according to criteria [21].
The computation of AHP is also matrix multiplication (see Eq. (8)). In this case, the sizes of the matrices are
ALModel
The model that is the starting point of this paper features a two-dimensional randomly generated environment with resources and thousands of individuals (see Fig. 1). As a decision-making method, it uses a fuzzy cognitive map (FCM). The simulation runs in discrete time steps (ticks). Each individual makes a decision about its activity at the beginning of every tick. Therefore, the decision-making is computed every tick by every individual in the model.
Table of evaluation of alternatives according to criteria
Table of evaluation of alternatives according to criteria
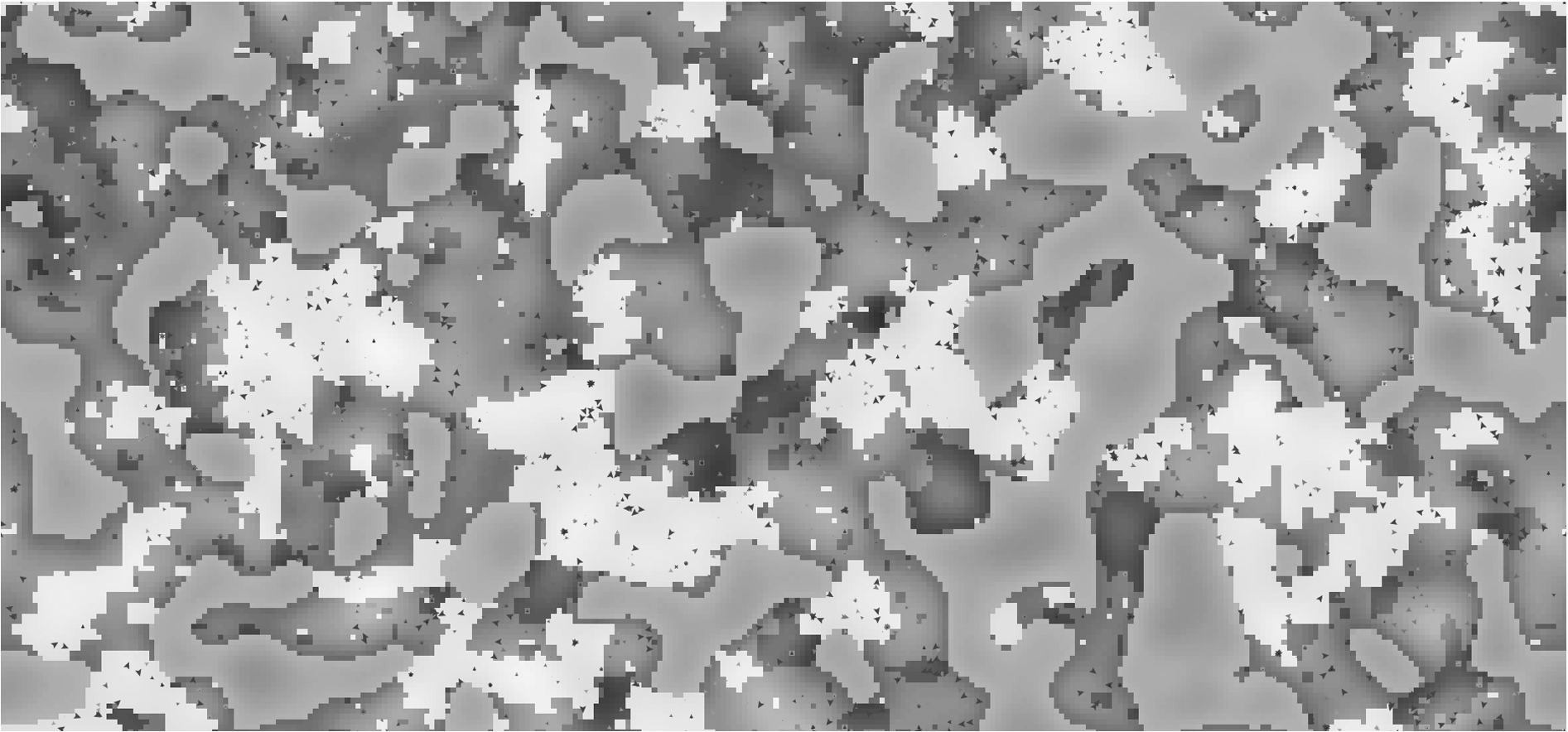
Screenshot of the environment of the ALModel that this paper uses to demonstrate the design and implementation of FCM-AHP.
The individuals are driven by the enhanced version of the FCM for autonomous agents, which was modified specially for purposes of artificial life [18]. It features three different classes of nodes: Need, Activity, and State. There is also one extra State node, Primary State, which is a numerical representation of the success of the individual (fitness). This distribution allows immediate reactions, better simulation of needs and other advantages over traditional FCMs. For this paper, the classes of nodes also serve as roles of nodes in decision-making (alternatives and criteria), which helps in the understanding of the design of the new decision-making model.
The FCM method handles almost whole agent’s logic. A single FCM simulates needs and performs decision-making at once. For both purposes, it needs a few nodes with their relations, which form a matrix of relations R. A higher number of nodes means more possibilities. However, adding a new concept node to an FCM with n nodes raises its number of calculations by
Each aspect of artificial life usually needs more than one new node. For instance, food management of an individual uses one node for a level of need (hunger), two nodes for activities (feeding, searching for food) and a State node used as an input concept, which allows currently available food supplies to be taken into consideration in decision-making. That is why only basic areas of artificial life were implemented in the model. The behavior of individuals covers management of vital resources (food and water), fatigue, danger, and reproduction. These phenomena enable evolution in the model. There is no place for reduction of the FCM without losing an important element of artificial life.
Initial matrix of relations R in the ALModel
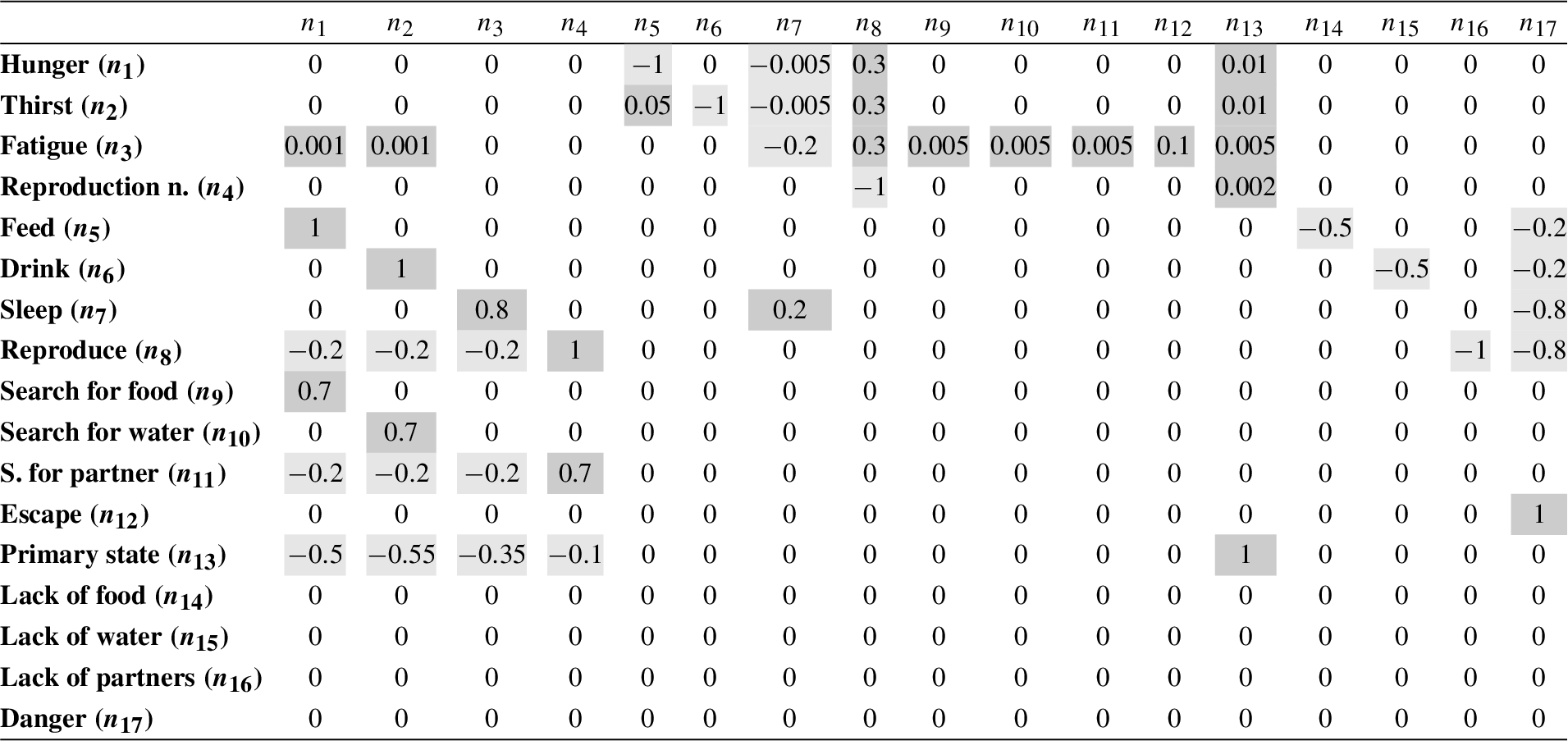
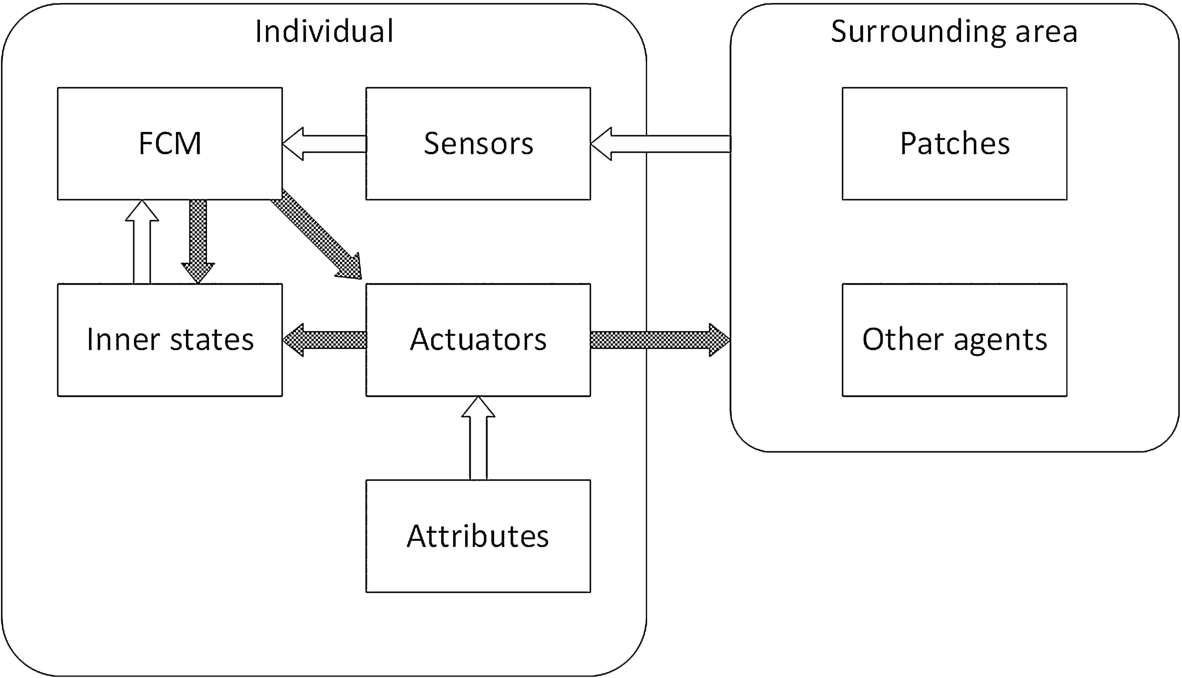
Diagram of an individual with the FCM only.
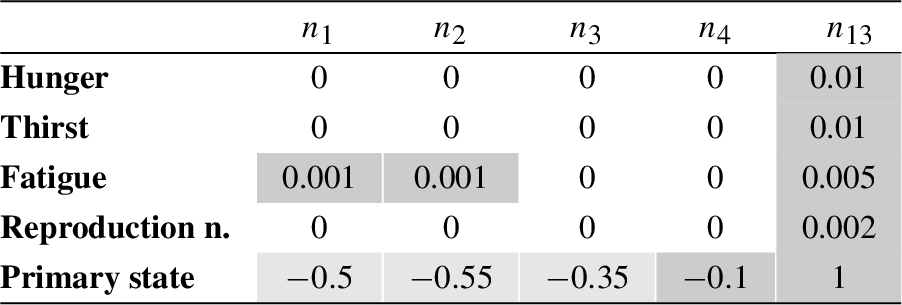
Table 2 contains initial values in the FCM. These values are mostly given by the nature of nodes or were adjusted through evolution and testing. The middle section (rows from
In Fig. 2, the diagram depicts an FCM-driven individual in the model. The white arrows represent a flow of information; the dark arrows express a direction of influence or method calling. The FCM manages behavior on a higher level and actuators try to fulfill the command in an environment. The FCM reads data from sensors and inner states, then makes a decision according to the current situation and sends the request to actuators. The actuators perform the selected action taking into consideration the individual’s vicinity and attributes. For example, the FCM decides to search for food; then the actuators direct the individual to the closest food source, if it is within sight, or eventually to the location where the individual was feeding last. If there is an obstacle (water) in the way, the actuators also have to perform more difficult path-finding than just heading directly to the target location.
As mentioned above, every node is important, but there are a few unused sections in the matrix of relations offering possible improvements of computational complexity. Table 3 shows sections of the FCM with the annotation of its usage in the model. For example, values in the States rows, which describe the influence of all nodes on State nodes, are always filled with zeros because all State nodes are input concepts in this model. Values of these inputs are updated from sources outside the FCM before computing; therefore, all relations to them are unused [6].
Usage of sections of the FCM in the initial model [19]

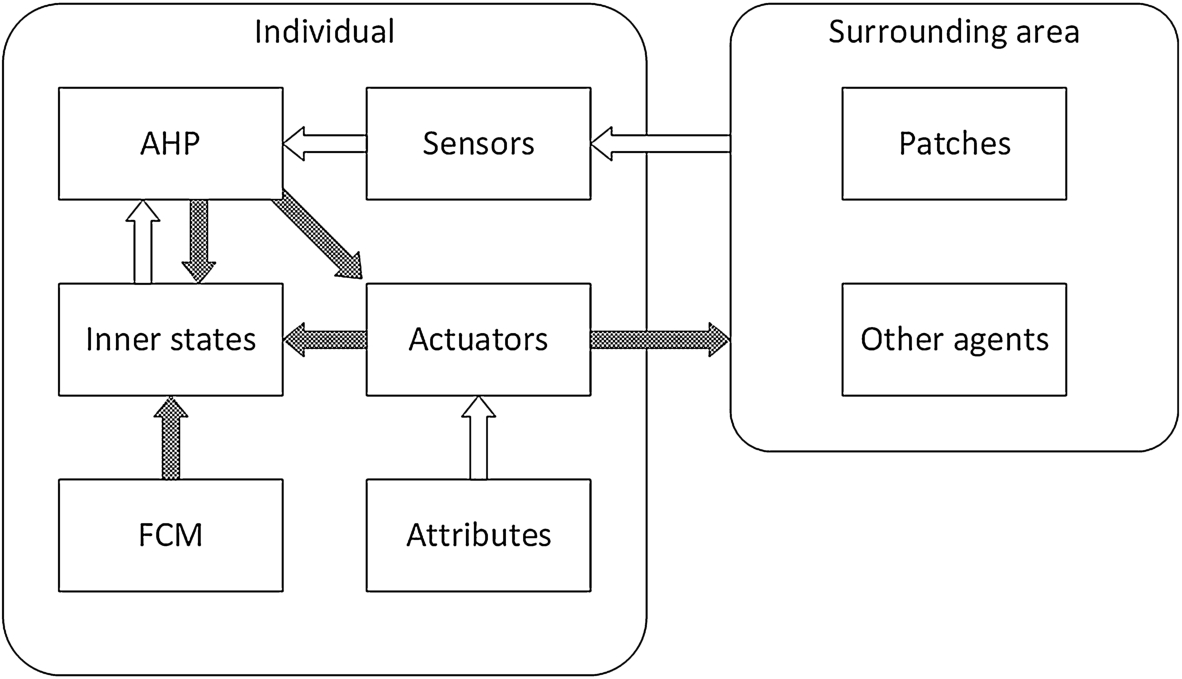
Diagram of an individual with AHP decision-making model [19].
Wider areas (such as State rows) can be excluded from the computation, but some unused sections still remain. The exclusion and other code optimization significantly improve the performance even without changing the behavior of individuals. However, these modifications are not the subject of this paper as the initial model already utilizes them.
This section describes the design and implementation of the new approach to the ALModel. The approach combines two methods: FCM and AHP. The new FCM is simplified because it leaves decision-making responsibility to AHP, which is specialized in this field. Although AHP is mainly designated for decision support systems, it is undoubtedly quite a powerful decision-making method and computationally efficient at the same time. It gathers the same data from sensors like the FCM did before, but AHP uses it more economically.
The combination of an FCM and AHP (FCM-AHP) was implemented in the model in Netlogo 5. The model is available for download at [20]. Methods of decision-making are switchable via a simple switch in the interface. Most of the code is exactly the same for both methods. Individuals gather information through the same sensors and perform actions through the same actuators. Only decision-making and partially inner states are affected. This implementation allows easier testing and comparison. Figure 3 depicts a diagram of an AHP-driven individual. The modified FCM has moved to a single role of simulation of inner states.
Initial matrix of relations
of the smaller FCM
Initial matrix of relations
A comparison of the smaller FCM (gray tiles) with the larger original one (both white and gray tiles)
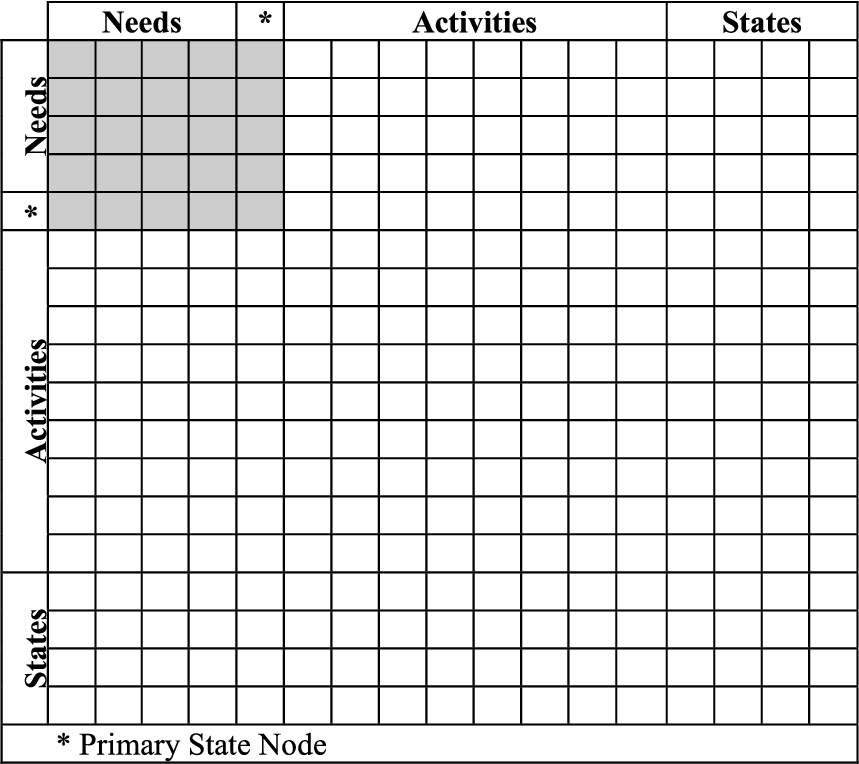
In the proposed model, the FCM has only five nodes instead of the original 17 (see Table 4). It simulates only the growth of inner needs (4 nodes) and the Primary state (1 node). The whole activity section (8 nodes) was removed because the responsibility of activity selection has moved to the AHP. Also, nodes reserved for inputs from sensors are no longer required because they are now processed by the AHP.
Table 5 shows how significant the difference is. Each tile represents value
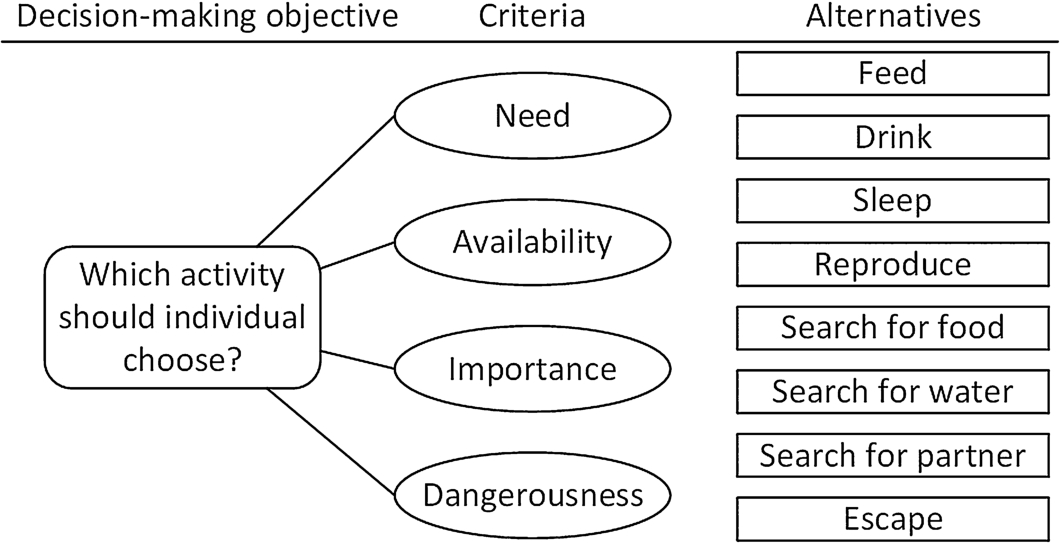
AHP decision-making designed for the model with criteria of the decision and possible alternatives [19].
The methods are easy to combine because both use the fuzzy range of values. Therefore, an output of one method can be used directly as an input to the second method without any fuzzification or defuzzification. The AHP design requires a set of alternatives, criteria, and their weights. At the beginning of each time step, individuals need to select an activity that they are going to perform. In the AHP, alternatives represent possibilities, from which the most suitable one is chosen according to criteria [13]. Therefore, the Activity nodes from the original FCM now transform into the alternatives for the AHP.
Although activities have a different nature, the decision criteria have to be applicable to every one of them. The criteria design is based on the original FCM, especially its replaced sections. In the larger FCM, a decision depends on the information from sensors and Need nodes. The sensors provide information about the availability of resources and the presence of predators in the vicinity. Figure 4 depicts the final decision-making design used in the model.
The first criterion represents the need for performing an action. Its values are simply imported from the FCM. For example, a hungry individual has a high value of hunger in the FCM. This value is exported into the AHP (without any transformation), where it raises the values of the Need criterion for all alternatives (activities) connected with food (feeding and searching for food). Most alternatives are associated with a Need node in the FCM. However, the need for activity Escape is dependent on surroundings rather than the individual’s inner needs. Therefore, its value is taken from a sensor.
The second criterion represents the availability to perform alternatives at the current time step. Some activities are available all the time, including Escape and Searching for food or water. For these alternatives, the value of this criterion is always at its maximum. The values of the other alternatives depend on other entities in the vicinity. Obviously, these values are taken from sensors. This criterion ensures that a thirsty individual will choose Searching for water over trying to drink immediately when water is unavailable at its current location. To avoid triggering an activity only by its availability, evaluations of alternatives regarding this criterion range from
The third criterion represents the importance of alternatives regarding the survivability of individuals. The criterion provides individuals with preferences in activities. When Hunger and Need for reproduction rise on the same critical level, an individual chooses the action that is more important for survival. With the initial AHP settings, the individual would choose to satisfy hunger before reproduction. In the model, the values of the criterion are fixed for the lifetime of individuals; however, it is subject to evolutionary changes. Therefore, after a few generations, individuals favoring reproduction over feeding may appear.
The last criterion takes into account the dangerousness of performing an activity near predators. Although danger can differ in every time step, the values of the criterion are fixed for a lifetime. In this case, the weight of the criterion serves as a variable affected by the current situation in the vicinity. When an individual is safe, its values of the criterion remain the same, but they are not taken into account.
The weights of criteria (except for the Dangerousness criterion) are adjusted through evolution. Every individual has its weight configuration inherited from ancestors. Genetically inherited weights and evaluations of criteria form a behavioral part of their genotype, which enables adaptation of species. Evolutionary changes in behavior may be short term for a few individuals if a random mutation occurs and does not prove to be useful. Alternatively, a change may last through many generations if the new behavior raises individuals’ chances of survival and reproduction. This case also usually starts by mutation; then it brings its possessors an advantage, which spreads to more individuals in the next generation. Evolutionary development is based on a simple rule, which emerges through selection. More successful individuals are more likely to reproduce and vice versa.
That is why this model does not need analysis and careful design of evaluations and weights. In other projects without evolutionary processes, proper settings of these values need to be carefully considered and explained. However, the initial settings of the model do not have to be perfect. The very first behavior was set manually by rough guessing. It just had to be sufficient to allow the first generation to survive and reproduce. After a few generations, behavior was adjusted by evolution and then set as new initial behavioral settings. In ALModel, this procedure applies for both FCM and FCM-AHP. Table 6 shows initial values in matrix E and vector C. Values shown as intervals are updated every time step according to the current situation. Values in gray tiles are subject to evolutionary adaptation.
Initial evaluations and weights of AHP; values with a range are inputs from an FCM or sensors; values on gray tiles are adjusted by the evolution during a model run
The final time complexity of the proposed solution is O
For the proposed solution, the sum of m and c is always lower than the original number of nodes n. The number of nodes in the smaller FCM m is about a third of the original number because all Activity and some State nodes (input concepts) are removed. The criteria are based on simplification and a combination of the Need and State nodes. In this case, all Need nodes were transferred into a single criterion (Need). State nodes form another criterion (Availability). The two additional criteria slightly compensate for the variety of possibilities of FCM. There are not many other possible criteria for a model of this complexity.
Since the alternatives in the AHP are activities from the original FCM, which also contains other nodes besides Activity nodes, then a is always lower than n. If Eqs (9) and (10) are true, then Eq. (11) is also always true.
Therefore, the proposed solution always processes fewer mathematical operations than the original one. In this case, the values are as follows:
The presented approach was tested especially for time complexity, which was the main reason for its design. However, at first, FCM-AHP was compared with the original model for differences in the proficiency of the behavior and other possible effects on the model.
Obviously, the individuals behave in different ways due to the different decision-making. After a few ticks, model-runs with the same initial settings diverge, which prevents their direct comparison. The combination of certain world settings and configurations of decision-making can cause the extinction of different species, which leads to even greater disparity. Therefore, when possible, methods were compared through the quantitative measurements of dozens of model runs with various settings. In the first experiment, the quality of the decision-making of both methods was compared via average fitness of individuals.
Testing proved the minor superiority of the FCM decision-making. The fitness of individuals was measured by the Primary state, which depends on the values of Need nodes. Figure 5 shows a comparison of the methods. Each value used for the box plot represents the mean fitness of a population in the simulation. The test was conducted with eight different model settings during 100 000 time steps. FCM-driven individuals had slightly better fitness during most of the model runs. The only exceptions were specific groups of individuals in a few model runs. The average fitness of FCM-AHP-driven individuals is about 4.4% lower than that of the FCM-driven ones. The difference does not cause major issues, and individuals with FCM-AHP are definitely able to manage their vital needs so that they can survive in the model.
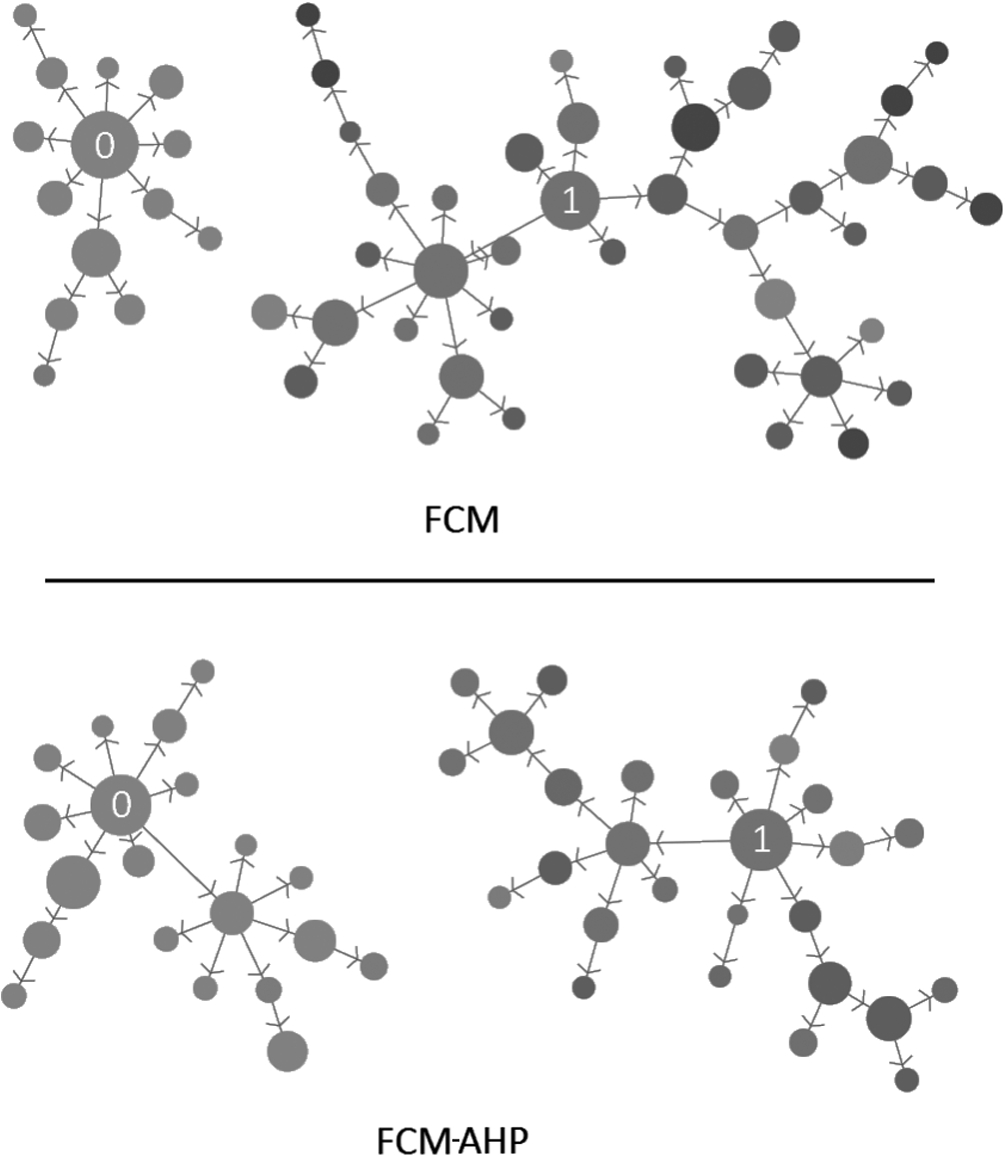
Also, the evolutionary development of species was observed. However, the purpose of these tests was to prove that the new decision-making method does not restrict evolution in the model. A direct comparison is not feasible due to the mentioned disparity between compared model runs and in this case also the absence of an informative quantitative measurement. For example, Fig. 6 compares two pairs of phylogenetic trees. These trees belong to two carnivore species which were generated in the environment with the same initial settings. Each bubble represents a species (bubbles with a number show initial species). The arrows point to the species that evolved from the species on the other side of the arrow. The size of bubbles represents the number of individuals that were classified into that species during the whole model run. In Fig. 6, species with fewer than ten members are hidden. The brightness of bubbles depicts an attribute of the species; in this case, it is speed (dark bubble means slow species; bright fast).
Obviously, the model runs diverged soon after the beginning; however, there are a few similarities. Both species in Fig. 6 survived until the end of the model runs (100,000 ticks in this case). In the both model runs, individuals from the tree that evolved from species 0 were small, very fast predators, while individuals from the other tree in the figure were rather slow but strong and big predators. They focused on different prey species rather than compete for a single resource, which may be the reason why both species grew and prospered. Most importantly, the test proved that the new approach does not restrict or significantly limit evolution in the model through its lower complexity.
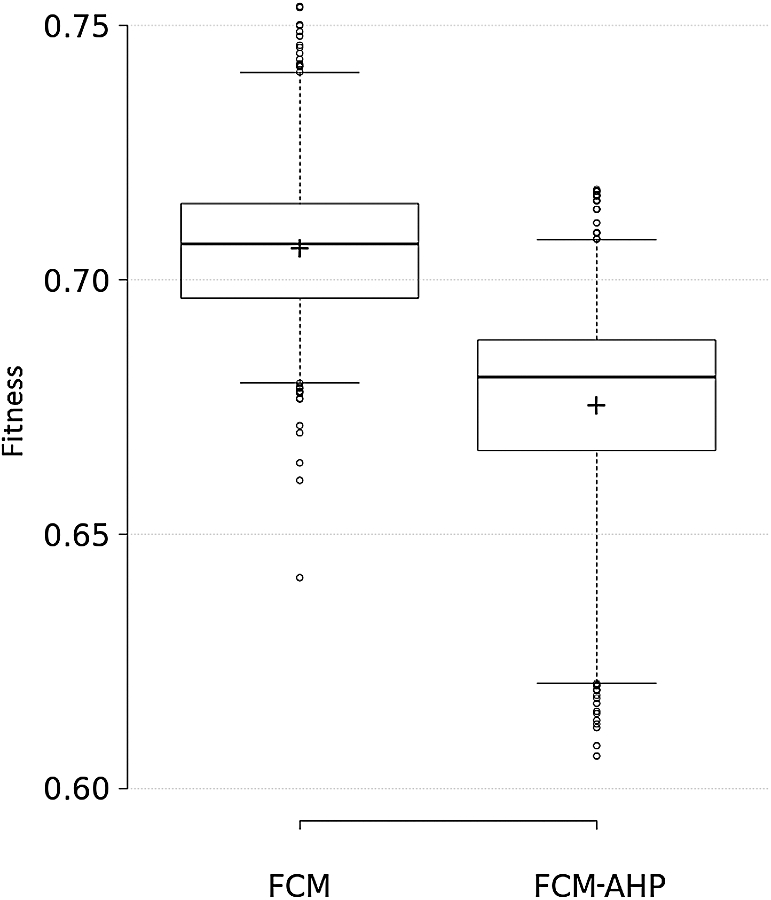
Comparison of individuals’ fitness.
Comparison of phylogenetic trees of two carnivore species; the brightness of the bubbles represents the speed of the species.
Figure 7 shows 100 time steps of a single individual in the model. The top plot in the figure depicts the development of his Need nodes and fitness (Primary state). The bottom plot explains changes of values in the plot above with a log of activities that the individual performed during the observed 100 time steps. During the first 27 time steps, the individual could not find any water source, and its thirst level was dangerously high along with fatigue from the searching. Then, it luckily found a place with water, food and even individuals of the same species. Next time, when the individual starts to get thirsty (time step 65), it remembered the location and found it much easier. Time steps at the end of the figure are also worth noticing because the effect of the Importance criterion is clearly visible there. The individual preferred feeding over sleep although Fatigue is slightly higher than Hunger.
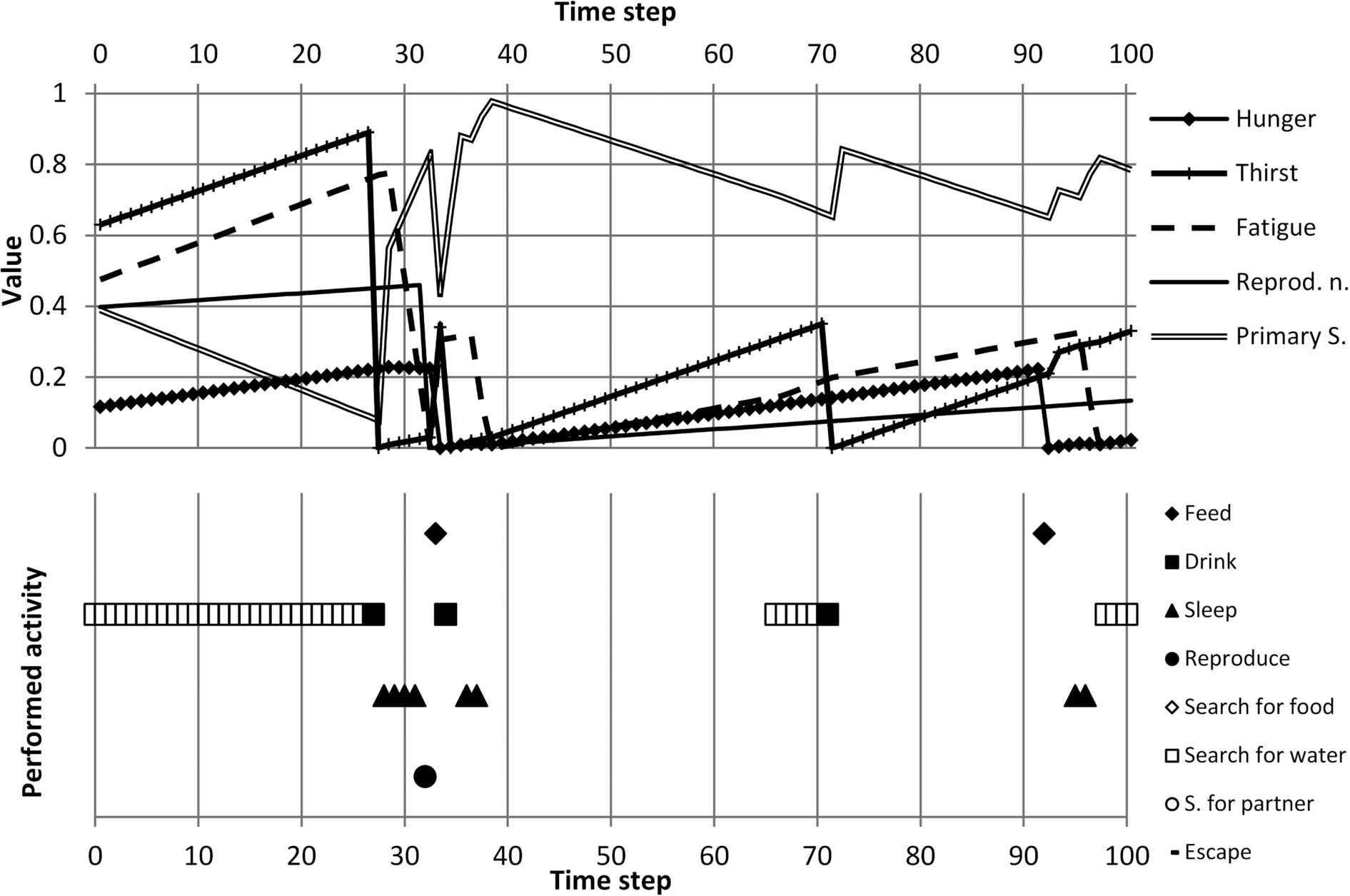
The behavior of an individual using FCM-AHP in the ALModel during 100 time steps.
Specification of testing devices
Comparison of mean model speed of methods during model runs after first 5000 ticks [19].
Concerning the speed of the model, two sets of tests were carried out. The first set compares the methods in the ALModel. These experiments were affected by the other aspects of artificial life, and their results greatly fluctuated. Therefore, they were performed multiple times (at least four times each) on different hardware configurations to observe the actual performance of the methods in the model. On the other hand, the second set of tests conducted on Java platform omits calculations besides the tested methods (decision-making and simulation of inner needs). The results of these tests show the potential of the proposed solution even outside the artificial life field. Because they are not affected by model settings or situation in the environment, the results are very stable and clearly describe the potential computational performance of the methods.
Since different decision-making methods generate different states of the world, some restrictions need to be applied to ensure proper testing of the performance of ALModel. Specifically, the number of individuals in the simulation has a significant impact on the simulation time. Therefore, the simulation ensured that the model runs had nearly the same number of individuals during all performance tests. That was achieved by adjusting the number of newly created individuals. When the total number of individuals is lower, breeding tends to produce more of them. When the number converges to the limit, the number of offspring is limited. Depending on its settings, this simple mechanism can maintain a stable number of individuals and still does not noticeably affect natural selection, evolution and other aspects of artificial life.
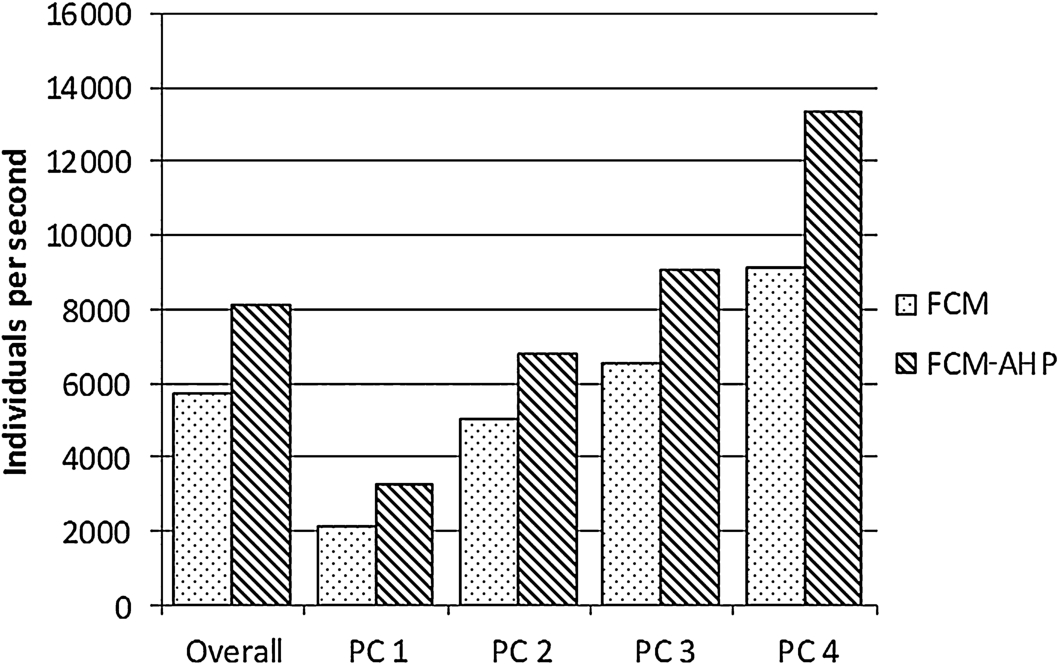
The performance of the model was measured with four different hardware configurations (described in Table 7). The tests were performed with various configurations, including the size of the population, the level of data collection or world settings. As the unit of measure, the rate of processed individuals per second was chosen. It is informative about performance and almost independent of the number of individuals in a model run. Figure 8 shows average model speed running on the testing devices. At the beginning of model runs, the approach with the AHP achieves about a 40% higher rate than the original FCM.
Note that the rate decreases over time due to the increasing size of the gene pool and filling of memory, which depends on the collection of data about model runs. There are also other model aspects with their own performance demands. Sensors search individuals’ vicinity to evaluate the level of danger or resource availability. The actuators need to find the optimal way of the execution of a command from decision-making, which often involves another search for possibilities in an individual’s vicinity. Moreover, with higher population density in the model, interactions occur more often, which also requires extra computational time.
Tests conducted on ALModel with the artificial intelligence method only (without sensors and actuators) showed that FCM-AHP achieves about an 118% higher rate than the larger FCM alone.
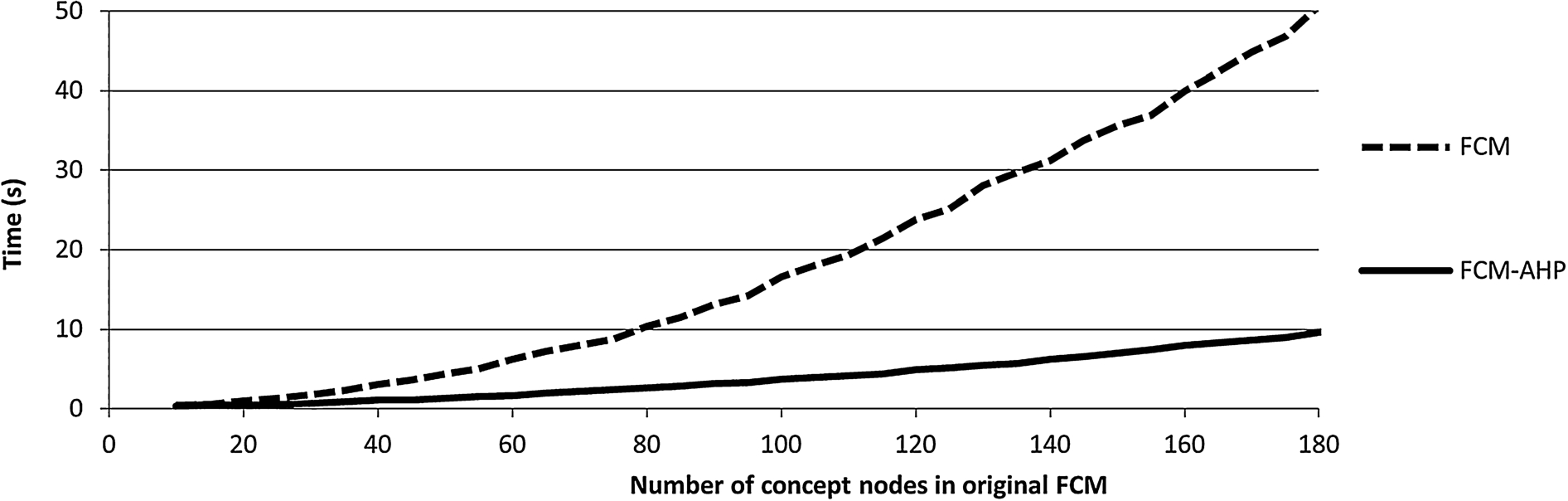
Performance tests conducted outside of a model; plot shows the dependency between the number of concepts in original FCM and the time needed to perform a million computations.
For a direct comparison of methods, the clean test was conducted on Java platform. This experiment is not influenced by any graphics and model processes (movement, sensors, interactions, and evolution). It shows much clearer results of methods for its general usage even outside the artificial life field. Figure 9 depicts the results of this test. Time value (vertical axis) in the figure represents the time needed to perform a million computations of the method depending on the number of concept nodes (horizontal axis). This test was conducted on PC 4 (see Table 7) with Java 1.8.0 using “-server” parameter.
Since the design of the FCM-AHP approach corresponds with a particular composition of the original FCM, the experiment required estimating the composition for each number of nodes. Compared with ALModel, the slightly worse scenario was implemented for this test. For n concept nodes, smaller FCM contains
At lower numbers of concept nodes, the difference in model speed is already quite significant. However, the difference rises with growing size of the FCM. For very complex structures with 100 and more concepts, FCM-AHP is about five times faster than just the FCM alone.
The combination of FCM and AHP (FCM-AHP) was successfully implemented in the artificial life model (ALModel) based on the FCM. The new approach enriched the original model with an entirely new way of decision-making. Both methods were tested and compared in terms of time complexity, quality of decision-making and overall impact on the model. It proved to be a dynamic, sufficiently strong and most importantly fast concept for individual-based models. Computational time of this method is less than half of the full FCM approach (54% decrease) at a price of the slightly worse accuracy of the decision-making (4.4% decrease). Moreover, it is not narrowly focused on artificial life; FCM-AHP is usable in other artificial intelligence fields that involve decision-making in a dynamic environment. With more complex models, the proposed approach can be up to five times faster than an original FCM.
The current development of the model is focused on a change of the platform. We would like to transfer the model from NetLogo to AnyLogic, which should further improve simulation speed and offer interesting tools for the design and testing of the model. Also, there is a possibility of modifying the model in order to enable usage of various artificial intelligence methods in a single model run. That would provide a direct comparison and competition of the methods regarding the quality of decision-making.
Footnotes
Acknowledgements
The support of Specific Research Project “Autonomous Socio-Economic Systems”, FIM, University of Hradec Kralove, Czech Republic (under ID: UHK-FIM-SP-2017) is gratefully acknowledged.