
Abstract

Keywords
On June 06th, 2018, M. A. Viraj J. Muthugala successfully defended his Ph.D. thesis entitled “Enhancing Interpretation of Uncertain Information in Navigational Commands for Service Robots Using Neuro-Fuzzy Approach” at the University of Moratuwa, Sri Lanka. The thesis has been supervised by Dr. A. G. Buddhika P. Jayasekara. The work has been conducted as a part of the project “MIRob (Moratuwa Intelligent Robot): An Interactive Service Robot for Domestic Environments” funded by the University of Moratuwa under Senate Research Grants SRC/CAP/14/16 and SRC/CAP/16/03. The thesis defense took place in a publically open presentation held at the Department of Electrical Engineering, University of Moratuwa, Sri Lanka. The thesis examination panel included Prof. Dileeka Dias, Prof. Chandimal Jayawardena, Dr. Achala Pallegedara, Prof. Nalin Wickramarachchi, and Prof. Rohan Munasinghe. The thesis was read and approved by the examination panel. Furthermore, M. A. Viraj J. Muthugala was consecutively awarded the highest grading (“Very Good”) for his progress reviews during the research by the progress review committee that included Prof. Ruwan Gopura, Dr. Chandima Pathirana, and Dr. Thilina Lalitharatne.
Thesis summary
An intelligent service robot is a machine that is able to gather information from the environment and use its knowledge to operate safely in a meaningful and purposive manner. Intelligent service robots are currently being developed to cater to demands in emerging areas of robotic applications such as caretaking and assistance, healthcare and edutainment. These service robots are intended to be operated by nonexpert users. Hence, they should have the ability to interact with humans in a human-friendly manner. Humans prefer to use voice instructions, responses, and suggestions in their daily interactions. Such voice instructions and responses often include uncertain information such as “little” and “far” rather than precise quantitative values. The uncertain information such as “little” and “far” have no definitive meanings and depend heavily on factors such as environment, context, user and experience. Therefore, the ability of robots to understand uncertain information is a crucial factor in the implementation of human-friendly interactive features in robots. However, the capabilities of existing approaches for interpreting uncertain information are par below that of humans and hence improvements are required [7].
As depicted in Fig. 1, a robot should be capable of inferring the meaning of information conveyed from a voice instruction to perform the exact requirement of the navigation task requested by the user. This sort of navigation voice instruction may consist of uncertain lexical notions in relation to distances, directions, references, path, positions etc. Therefore, this uncertain information must be interpreted effectively and succinctly to fulfill the request of the user. The exact meaning of the uncertain information depends on various factors such as environment, experience, context and the user. Furthermore, non-verbal instructions such as gestures may accompany with the voice instructions for enhancing the idea transferred to the peer; the meaning of the uncertain information may also depend on the non-verbal instructions associated with the voice instructions.
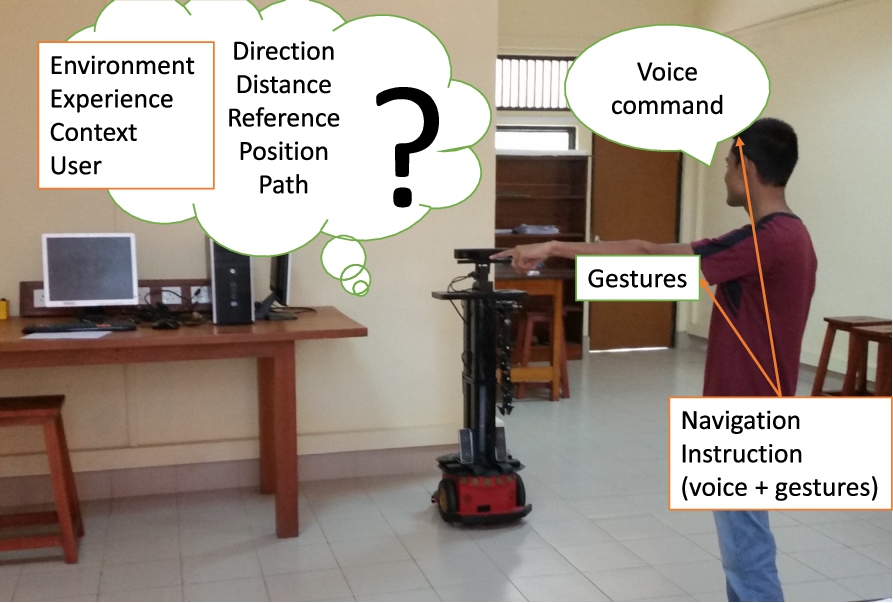
Usage of uncertain information in navigational commands.
The overall interaction and the rapport between a user and a robot obviously depend on the ability of the robot in correctly identifying and reacting in these sort of scenarios. Therefore, this thesis investigates the methods for resolving spatial ambiguities arisen due to the inclusion of uncertain information such as “little”, “large”, “few” and “far” in navigation instructions for improving the human–robot interaction. Moreover, this thesis contributes toward addressing the above-outlined issues by developing methods of interpreting uncertain information in relation to distances, directions and references in navigational commands.
The key contributions made in the thesis toward enhancing the interpretation of uncertain information in navigational commands for improving human–robot interaction are given below.
Adapting robot’s perception of distance notions based on environment [1,2]
Adapting robot’s directional perception based on environment [4]
Personalizing the robot’s perception of uncertain information while adapting to the environment [5]
Interpreting uncertainties in relation to the relative references [6]
Adapting the perception of uncertain information according to the information conveyed non-verbally [8]
Apart from the above-mentioned key contributions, an intelligent service robot named as Moratuwa Intelligent Robot (MIRob) [3] has been developed as a part of the research.