Geometric data models form the backbone of virtually all spatial information systems, such as GIS, CAD, and CAM. Yet a lot of spatial information from textual sources, including historical documents or social media, is predominantly of qualitative, especially mereotopological, rather than geometric-quantitative nature. While mereotopological theories have been extensively studied in Logic, Computer Science, Cognitive Science, and Geographic Information Science, most are unidimensional mereotopologies in the sense that only entities of a single dimension are permitted to co-exist. Integrating mereotopological information with geometric data requires a multidimensional mereotopology, which permits entities of different dimensions to co-exist, similarly to how geometric and algebraic topological data models permit points, simple lines, polylines, cells, polygons, and polyhedra to co-exist. It further requires complex spatial objects to be represented as sets of atomic entities such that spatial relations between complex objects can be computed from the relations of the atomic entities in their decomposition.
This paper provides a comprehensive study of CODI, a first-order logic ontology of multidimensional mereotopology. An axiomatization of mereological closure operations of intersection, difference, and sums for CODI is proposed in which these operations apply to all pairs of spatial entities regardless of their dimension. It is proved that for atomic models – and thus all finite models – the extended theory is indeed able to decompose all spatial entities into a partition of atomic parts. A full representation of the models as sets of Boolean algebras verifies this. The closure operations are further shown to satisfy important mereological principles from unidimensional mereotopology and to preserve many of the mathematical properties of set intersection and set difference.
Geometric data models power most of the spatial information systems used for navigation, mapping (e.g., geographic information systems (GIS)), and design (e.g., computer-aided design or manufacturing systems (CAD/CAM)) and form the foundation for the spatial information that is essential to transportation and logistics, property records, land use and urban planning, architectural, mechanical and product design, and emergency response planning and disaster relief. Geometric data models represent objects’ spatial location and extent using geometric conceptualizations of space – typically Euclidean or spherical geometry – either directly or as base entities in algebraic topological structures (see, e.g., work by Blumenthal and Menger (1970) and by Egenhofer et al. (1989)) such as simplicial or other cell complexes, or tessellations such as triangulated irregular networks (TIN). Each object is represented by a point location, a collection of points, or by more complex geometric features, such as polylines, polygons, or polyhedra, all of which are based on points (e.g., the points that define the individual segments of a polyline, which in turn define polygons). All points must have precise coordinates in the underlying reference system. Yet a lot of other, especially textual, information such as from historical records or from social media is of primarily qualitative rather than geometric-quantitative nature and lacks geometric precision. Such qualitative spatial information cannot easily be stored using geometric data models without often arbitrary and unwarranted geometric approximations of the described objects and places. Such geometric approximations also lead to artifacts such as accidental overlap, for example, two lakes may overlap or a road along a lake’s share overlapping the lake because of their representations as polygons and polylines and a purely geometric definition of overlaps. Moreover, the precision that comes with geometric representations, for example the ability to measure the length or size of an intersection, is misguiding for geometrically approximated or vague entities. More important is often the nature of the spatial relationship between the entities (e.g., does the road border the town or does it go into it?, is it entirely within the town or are parts outside?) that qualitative relations can capture without the detour via geometric approximation of the entities.
Mereotopological models of space can fill this gap, but are often incompatible with the existing geometric data models, thus motivating the presented work. While mereotopology has been extensively studied throughout Philosophical Logic, Computer Science, Cognitive Science, and Geographic Information Science (see, for example, the excellent overview by Casati and Varzi (1999) or the review by Hahmann and Grüninger (2012)), most existing mereotopological theories are unidimensional in the sense that they only permit entities of a single dimension in any particular model and thus cannot accommodate zero-dimensional (e.g., points), one-dimensional (e.g., lines or curves), two-dimensional (e.g., polygons and surfaces), and three-dimensional spatial entities (e.g., solids) in a single a model. Multidimensional mereotopologies overcome this restriction by explicitly permitting entities of different dimensions to co-exist in a model (Galton, 2004).
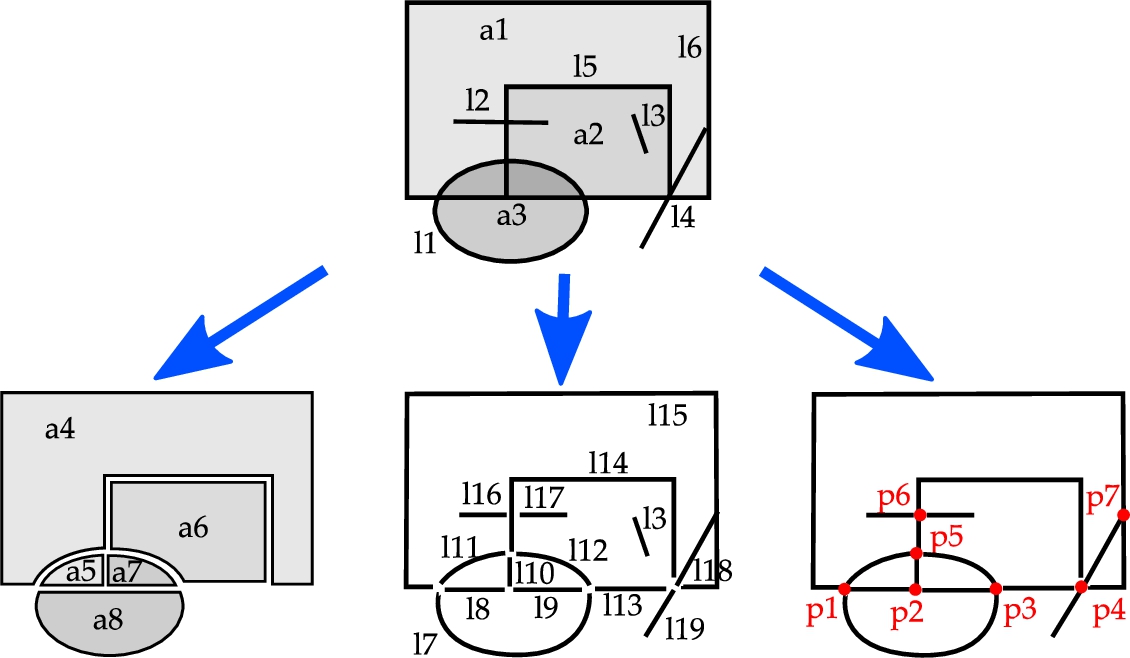
This paper provides a comprehensive and streamlined overview of the multidimensional mereotopology whose development has been inspired by Galton’s and Gotts’ earlier work (Galton, 1996; Gotts, 1996). formalizes the primitive notions of spatial containment and relative spatial dimension (the ontology’s name stands for COntainment and DImension) in first-order logic and defines a set of six intuitive mereotopological relations: containment and its refinement parthood together with contact and its refinements partial overlap, incidence, and superficial contact, which apply to entities of all dimensions but which operate largely independently of the precise dimensions of the involved spatial entities (Hahmann and Grüninger, 2011b). This paper extends by introducing and axiomatizing mereological closure operations of product/intersection, difference (i.e., relative complementation), and sums that apply to any pair of spatial entities regardless of their dimension. The earlier theories (Galton, 1996; Gotts, 1996) limited these operations to entities of equal dimension. As a result, some meaningful intersection and differences, for example between a linear feature (e.g., a road or river) and a 2D region, as shown in Fig. 1(c), are not captured, thereby limiting the use of the operations more than necessary. However, if we insist that these operations are defined for all pairs of spatial regions, one can easily end up with mixed-dimensional entities, such as an entity consisting of a line segment and an isolated point (e.g., the intersection in Fig. 1(a)) or of a 2D region with a line segment removed (e.g., the difference in Fig. 1(c)). To better understand to what extent aligns with unidimensional mereotopologies and geometric conceptualizations of space, this paper analyzes ’s extended axiomatization with a focus on the following questions:
Are the operations well-defined, i.e., do they always result in a unique spatial entity regardless of the dimensions of the involved entities?
Do these operations behave as expected – e.g. as unidimensional mereotopologies – when applied to entities of equal dimension?
Which mereological principles from unidimensional mereotopologies are preserved?
Which mathematical properties (e.g., associativity, commutativity, idempotence) typically associated with set theoretic and unidimensional mereotopological notions of the operations are preserved?
What is the structure of the models of the resulting theory?
Models of that illustrate intersections and differences involving regions of varying dimensions. Other mereotopologies only entail the existence of an entity for the intersection and difference in (b). In (a), r and s share two regions: the linear feature l and the point p. But both together cannot be the intersection, because such an entity would not be a dimensionally uniform region. Instead, . Then the intersection · is not associative because . In (b) intersection and the differences and are defined as expected between two regions of the same dimension. In (c) the intersection is a proper part of y but not a proper part of x, though a lower-dimensional region contained in x. Hence, only the difference results in a new region, while loses the lower-dimensional artifact and results in x. In (d) and since the intersection is of a lower dimension than both x and y.
It is shown that the proposed mereological operations are well-defined in the resulting theory , with the double arrow denoting upward (i.e. under sums) and downward (i.e. under intersections and differences) closure. It is shown that this theory exhibits the expected behavior between entities of the same dimension and satisfies the most important mereological principles from unidimensional mereotopology. The operations further adhere to most of the desired mathematical properties, though some require weakening (e.g., left- and right-alternative laws instead of associativity of the intersection operation), while only few must be forfeited. It is further proved that atomic models of – the theory closed only under intersections and differences – can always be decomposed (i.e., partitioned) into a set of minimal (i.e., indivisible) parts, which simplifies the implementation of the theory on top of geometric data models wherein entities are represented as collections of minimal entities (e.g., line segments or atomic cells). This decomposition extends to because it is a logical extension of . As a final result, the models of are characterized as sets of Boolean algebras, wherein the set of all entities of identical dimension together form a Boolean algebra.
Background and related work
Mereological relations relate parts to wholes (e.g., subregions to a larger region), while topological relations describe whether and how things are connected to one another. Mereotopological relations (Varzi, 1996) arise from the combination of both kinds of relations, enabling the definition of relations such as overlap (i.e., connected via a shared part) and external connection (i.e., touching in only a boundary).1
In geography and geographic information science, the term ‘topological relations’ (Rodriguez, 2016) is often used more loosely, comprising topological, mereological, and mereotopological relations alike.
Mereotopological relations are among the most common relations used to capture qualitative spatial information as they play an important role in human conceptualizations and natural language descriptions of space (Mark and Egenhofer, 1994; Klippel et al., 2013), while other important qualitative relations (Hahmann and Grüninger, 2012; Cohn and Hazarika, 2001), such as of direction, orientation, relative size, or relative distance are beyond the scope of this paper. The foundational nature of mereotopological relations is further underlined by their incorporation into virtually all upper ontologies that model space to some extent (Gruninger et al., 2017), including the Descriptive Ontology for Linguistic and Cognitive Engineering (DOLCE; Masolo et al., 2003), the Basic Formal Ontology (BFO; Smith et al., 2012), the General Formal Ontology (GFO; Baumann et al., 2016), and the Suggested Upper Merged Ontology (SUMO Niles and Pease, 2001; Muñoz and Grüninger, 2016). Likewise, many general-purpose geospatial ontologies, such as the joint ISO/OGC standards Simple Feature Access (SFA; International Electrotechnical Commission (ISO/IEC), 2004) and Geography Markup Language (GML International Electrotechnical Commission (ISO/IEC), 2007) as well as the OGC standard GeoSPARQL (Open Geospatial Consortium (OGC), 2012), all incorporate some mereotopological relations to simplify human interaction with spatial data.
Mereotopology originally emerged from interest in region-based theories (Clarke, 1981; Biacino and Gerla, 1991; Whitehead, 1929) – so-called pointless topologies – as more perceptually accurate alternative to point set topology and geometry, wherein points are first-class entities. In that philosophical tradition, mereotopologies have been married to strict region-based conceptualizations of space wherein extended spatial entities – typically called regions – are the only first-class entities of the domain and points and other lower-dimensional entities are not entities in the domain. We refer to these mereotopologies as unidimensional mereotopologies (Hahmann and Grüninger, 2012). Examples of first-order logic axiomatizations of unidimensional mereotopology include the Region Connection Calculus (RCC; Cohn et al., 1997; Randell et al., 1992) and the mereotopology RT (Asher and Vieu, 1995; Hahmann et al., 2009). Unidimensional mereotopologies can be constructed using either a single topological primitive of contact, a single mereological primitive of parthood, or a combination of a topological and a mereological primitive relation (Cohn and Varzi, 2003). These unidimensional mereotopologies must resort to higher-order constructs, i.e., constructs such as ideals or filters that are not expressible in first-order logic, as only ways to define lower-dimensional entities. But as clearly demonstrated by work originating from the spatial database and geographic information science communities (Clementini and Di Felice, 1995; Clementini et al., 1993; Egenhofer, 1991; Egenhofer and Herring, 1991; McKenney et al., 2005), mereotopological relations also apply to entities of different dimensions. Thus, it is possible to decouple mereotopological relations from a strictly region-based, unidimensional conceptualization of space.
A few first-order logical axiomatizations of mereotopology, (e.g., Baumann et al., 2016; Galton, 1996; Gotts, 1996; Smith, 1996; Smith and Varzi, 1997) have gone this route by allowing entities of different spatial dimensions to co-exist. We refer to those theories as multdimensional mereotopologies. Many of them, however, limit the kind of permissible lower-dimensional entities. For example, Smith (1996) and Smith and Varzi (1997) follow Brentano’s ideas of space (Brentano, 1988) wherein boundaries (and parts thereof) are the only kind of permissible lower-dimensional objects. Smith and Varzi (1997) achieve this, for example, by including a primitive predicate denoting ‘x is the boundary of y’ in their axiomatization.
To our knowledge, Galton (1996) was the first to acknowledge the need for an explicit concept of “dimensionality” in a multidimensional mereotopology, an approach the development of the family of theories also follows. While Galton used a boundary predicate similar to Smith and Varzi (1997), he then defined lower-dimensional entities more generally as the entities that are of the same dimension as the boundary of higher-dimensional entities rather than only the boundaries themselves. Thus, lower-dimensional entities do not have to be boundaries of higher-dimensional entities. Since then, at least three first-order axiomatizations of multidimensional mereotopologies have been developed: Gotts’ INCH Calculus (Gotts, 1996), GFO’s ontology for space (Baumann et al., 2016), and (Hahmann and Grüninger, 2011b). The INCH calculus is based on the single primitive relation denoting that x includes (i.e., spatially contains) an equi-dimensional chunk of y; this relation then allows defining notions of equidimensionality and lower-dimensionality. Unlike the INCH calculus, introduces a primitive relation as an explicit relation for comparing the dimensions of two entities. But and the INCH calculus are similar in that they define their mereotopological relations without explicitly distinguishing the dimensions of the involved entities. For example, ’s containment relation applies regardless of the specific dimension of the contained entity. GFO Space takes a different approach by defining four sorts of spatial entities, namely zero-dimensional, one-dimensional, two-dimensional, and three-dimensional entities using a primitive relation of spatial boundary and then defining separate mereotopological relations based on the dimension of the involved entity. For example, GFO Space dimensionally distinguishes four containment relations: spatial part, 2-dimensional hyper part, 1-dimensional hyper part, and 0-dimensional hyper part.
This work on extending with closure operations is largely motivated by the observation that Galton’s work, Gotts’ INCH calculus, and GFO Space all unnecessarily restrict the mereological closure operations of intersection, difference, and sum to only pairs of entities with identical dimension. The restriction of the sum operation is justifiable to avoid entities of mixed dimensionality because the sum of two entities of different dimensions will always be of mixed dimension except for the special case where one entity is contained in the other. But the intersection or difference between two entities of different dimensions can be, and often is, of uniform dimension. For example, the intersection of the areal and linear features in Fig. 1(c) is itself a linear feature, but this intersection is permissible neither in the INCH calculus nor in Galton’s theory. This paper explores how to fill this gap by presenting and investigating an extension to with axioms that define intersections, differences, and sums for all pairs of entities regardless of their relative dimension. We achieve totality by modifying the operations such that they drop all entities in the intersection (or difference or sum) that are not of the same dimension as the highest-dimensional entity in the intersection (or difference or sum). For example, a 2D region that intersects a linear feature in a line segment and a point would drop the point and just yield the intersecting line segment.
In addition to the discussed prior work on axiomatic formalizations of mereotopology, two other types of approaches for defining mereotopological relations between spatial entities have been studied in the literature: (1) qualitative calculi of lattices of relations and associated composition operations, such as the RCC-5 and RCC-8 (Cohn et al., 1997; Randell et al., 1992); and (2) matrices of the nine point-set intersections of the interior, boundary, and exterior of two entities (Egenhofer, 1991; Egenhofer and Herring, 1991).
Qualitative calculi of mereotopology, such as the RCC-5 or RCC-8, are a set of base relations equipped with a composition table that supports constraint-based reasoning over sets of relations between regions (Cohn and Renz, 2008). While the RCC relations are derived from an accompanying logical axiomatization, the axiomatization’s purpose is only to ensure that the base relations are jointly exhaustive and pairwise disjoint (JEPD). The axiomization – including the closure operations defined therein – is not used (and cannot be used) for constraint-based reasoning with the qualitative calculi. Whereas the original RCC is restricted to a set of regions of equal dimension (e.g., a set of 2D regions or a set of 3D regions), a more recent extension to multidimensional space has been proposed by Clementini and Cohn (2014), with corrections proposed by Izadi et al. (2019). However, this calculus – called RCC*-9 – does not include predicates that allow expressing of what dimension two related entities are: neither absolutely (using classes of regions) nor relatively by comparing the dimension of two regions. Even earlier, Kurata (2010) proposed the 9+-intersection calculus as a multidimensional calculus of mereotopological relations that dimensionally refines the 9-intersection approach, which is discussed in more detail shortly, to derive more fine-grained relations. However, no closure operations are included in this calculus either. The main reason is that the kind of constraint-based reasoning used with any qualitative calculi restricts the involved relations to binary ones. Thus, these qualitative calculi are unable to express or perform reasoning using closure operations such as sums, differences, or intersections to pairs of entities because these binary operations (which are, mathematically, functions) are, once translated to relations, ternary relations. Thus, closure operations do not fit into the kind of lattice of relations that is the basis of any qualitative calculus and are outside the scope of constraint-based reasoning.
In addition to this limitation of the signature of qualitative calculi, it is also not yet clear how useful composition-based reasoning can be for multidimensional mereotopological relations because in a higher-dimensional space many combinations of a relation between x and y and another relation between y and z seems to only minimally restrict what relation can hold between x and z – as supported by the sheer number of relations in dimensionally refined versions of the 9-intersection method discussed below. This requires further study of the composition tables for the multidimensional calculi, which have not yet been published for either the RCC*-9 or the 9+-intersection calculus. In ongoing work, we are also conducting a more thorough formal comparison and integration between the RCC*-9 and the theory presented in this paper.
Matrices of point-set intersections, such as used by the 9-intersection method (Egenhofer, 1991; Egenhofer and Herring, 1991; Kurata, 2008), define mereotopological relations based on combinations of the point set intersections of the interior, boundary, and exterior of two regions. Extensions that take the dimensions of the participating entities into account, lead to a combinatorial increase in the number of distinct mereotopological relations, for example the dimension-extended and calculus-based methods by Clementini and Di Felice (1995) result in 52 and 81 unique relations, respectively, and the approach by McKenney et al. (2005) creates around 300 relations – and these relations do not even consider any 3D entities. While the total number of relations is not easily gathered for the 9+-intersection calculus, it likely yields a similarly large number of relations. This is caused by introducing separate relations for each combination of the dimensions of the involved entities. For example, separate point-point, point-line, point-region, line-line, line-region, and region-region relations are defined.
But more importantly and in line with the original intent of the 9-intersection approach – which was to provide a more user-friendly, qualitative language to query geometric data sources – these approaches do not provide any axioms relating the relations, thus very much limiting the spatial reasoning that can be performed. Specifically, mereological closure operations are not within the scope of these approaches. Only the few approaches that additionally provide a qualitative calculi (e.g., Kurata, 2010) support reasoning but still not over expressions that involve any of the mereological closure operations. Such approaches, for example, cannot reason about how the difference between two regions is related to a third region given how the third region is related to x and y.
Preliminaries: The multidimensional mereotopology CODI
This section reviews the multidimensional mereotopology , which was first proposed by Hahmann and Grüninger (2011b) and fully developed by Hahmann (2013), and proves additional theorems that help characterize the defined relations. These theorems will also simplify many of the proofs in the extension of by closure operations presented in the subsequent section. Any model of has a universe of discourse that consists of a finite or infinite set of spatial (and possibly spatio-temporal) regions of various dimensions. All these regions are embedded in a common n-dimensional space, typically in , and thus form an n-dimensional spatial scene. We will specifically study the finite models, that is, the scenes with only a finite number of interacting spatial regions (points, curves, areas or volumes).
In any model, every spatial region is simple or complex. Simple regions represent regular closed sets2
A regular closed region x satisfies , that is, the closure is equivalent to the closure of its own interior. All regions being regular closed or regular open is a common requirement throughout mereotopologies (Cohn et al., 1997; Hahmann and Grüninger, 2012) to avoid regions of mixed dimensions or with lower-dimensional artifacts.
of some dimension that can be embedded in . Complex regions are unions of finitely many regular closed sets – each set being called a component. Components of a single complex region can overlap only in their boundaries, that is, holds for any two components x and y of a complex region. Each complex region also has an associated dimension m such that every component thereof is homeomorphically embeddable3
An arc, for example, is homeomorphic to a straight line segment and thus can be embedded in . Likewise, an entity consisting of three arcs radiating from a single point is treated as 1D feature because each arc is individually homeomorphically embeddable in , even though the entire entity cannot be embedded in .
in some space and no component can be embedded in a space . Thus, each component is a bounded manifold in .
Examples of permissible regions are points and finite sets of points; 1D entities such as curve and line segments, infinite curves and lines, as well as complex linear features (e.g., finite sets of segments connected, if at all, only in their endpoints); 2D areal regions including polygons, cell complexes, and other bounded regions (e.g., a part of the surface of a sphere) as well as unbounded regions (e.g., planes, semi-planes, or the entire surface of a sphere); or 3D voluminal regions. Regions with lower-dimensional artefacts, for example, an areal region with a protruding or missing line segment or a missing boundary is not permitted as entity in the domain, but could be described as a “scene” (i.e., a model of ) consisting of two or more entities that happen to intersect. The theory can be limited to a specific number of dimensions if so desired (Hahmann, 2013; Hahmann and Grüninger, 2011a).
Note that is designed as a theory of abstract spatial entities, i.e., arbitrary space regions, rather than physical/material endurants. For abstract spatial entities, arbitrary intersections, complements, and sums are justifiable as they produce other abstract spatial entities. The same is not necessarily true for physical objects. Because of this scope, all entities in the domain of discourse are assumed to be space regions. However, a second variant of the theory that explicitly distinguishes space regions – denoted by – from other objects, in particular physical endurants, has been developed to allow the theory to be used in conjunction with DOLCE taxonomy of physical endurants. In that version,4
These variants of can be found in the folders multidim_space_XXX in COLORE: http://colore.oor.net.
all axioms are qualified so that they only apply to space regions. That also means that the mereotopological relations only apply to space regions, although a region function that assigns a physical endurant the space region it occupies allows expressing mereotopological relations between physical endurants as, for example .
’s formalization is based on two primitive relations: (1) a mereological predicate of spatial containment, denoted as and interpreted point-set topologically as “x is a subset of y” (i.e., x is entirely contained within y), and (2) a predicate – typically written in infix notation as – that compares the dimension of two spatial regions and is interpreted as “if all of y’s components can be embedded (as regular closed sets) in spaces of dimension m, then all of x’s component can be embedded in spaces of dimension m or lower”.5
The original axiomatization (Hahmann and Grüninger, 2011b; Hahmann, 2013) uses as primitive, but is otherwise logically equivalent.
Compact axiomatizations of both primitives and their interaction are presented next as basis for the subsequent axiomatization of the closure operations.
The theory of relative dimensionality
The predicate is a reflexive, totally ordered, and transitive relation (D’-A1–3), with , , , and defined as expected (D’-D1–4). For mathematical simplicity, the theory introduces a zero (or null) region, indicated by the unary predicate . The zero region – if one exists at all6
will entail that the zero region exists (Z-T1) to ensure totality of the difference operation.
– is unique (D’-A5) and is assigned a dimension lower than all other regions (D’-A5).7
The set of axioms used here are denoted by D’ to distinguish them from an earlier more generalized axiomatization (Hahmann and Grüninger, 2011b) that allowed for entities with incomparable dimensions.
(D’-A1)
( reflexive)
(D’-A2)
( is a total/linear order)
(D’-A3)
( transitive)
(D’-A4)
(unique zero region)
(D’-A5)
(zero region has lowest dimension)
(D’-D1)
(lesser dimension)
(D’-D2)
(equal dimension)
(D’-D3)
(greater dimension)
(D’-D4)
(greater or equal dimension)
Additional notions of maximal and minimal dimension (apart from the zero region) and and of covering dimension (i.e, next greater dimension) (D-D5–7) are defined as follows.
(D-D5)
(maximal-dimensional entities)
(D-D6)
(minimal-dimensional non-zero entities)
(D-D7)
(next-lower dimension)
For most purposes, it is convenient and customary to assume that the set of dimensions form a bounded (i.e. with a lowest and a highest dimension, postulated by D’-A6 and D’-A7) and discrete set (i.e. the dimensions are not dense in the sense that there is a unique next-lower and next-higher dimension for each region; captured as D’-A8 and D’-A9).
(D’-A6)
(a region of lowest dimension exists)
(D’-A7)
(a region of highest dimension exists)
(D’-A8)
(discrete set of dimensions: for every region that is not of highest dimension a region of next-higher dimension exists)
(D’-A9)
(discrete set of dimensions: for every non-zero region that is not of lowest dimension a region of next-lower dimension exists)
All modules presented here are provided in Common Logic format in COLORE: http://colore.oor.net in the folders multidim_mereotopology_XXX. , for example, is axiomatized in http://colore.oor.net/multidim_mereotopology_dim/dim_prime_linear_bounded_discrete.clif.
The following theorems D-T1–D-T3 verify that the defined relation is indeed an equivalence relation, i.e., that is reflexive, symmetric, and transitive. D-T4, D-T5 verify that dimensional equivalence preserve transitivity of , while D-T6 expresses in simpler form that any two regions are dimensionally comparable, i.e., they either have the same dimension or one of them has a lower dimension than the other.9
Proofs for all theorems – sentences with labels of the form XX-Tx – throughout Sections 3 to 5 and for the supplementation principles EP-E1, EP-E2, EP-E3, PO-E1 and PO-E2 in Section 4 are provided in the Appendix.
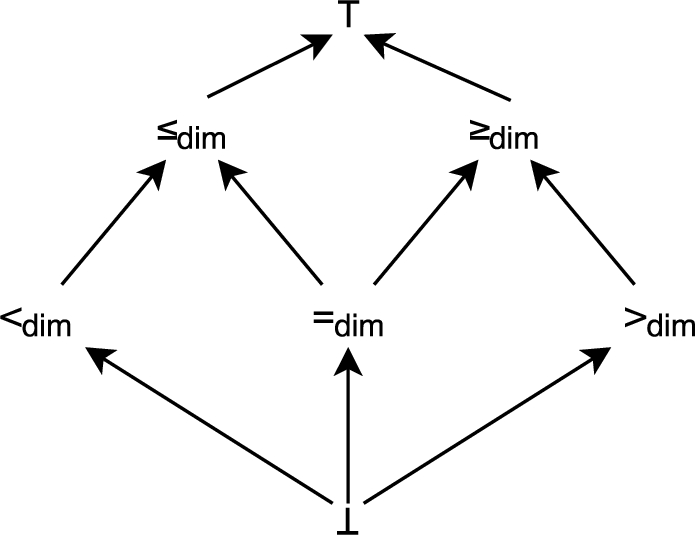
Together with the definitions, this ensures that the dimension relations form the relation lattice shown in Fig. 2.
Lattice of the dimensional relations in and maintained in .
(D-T1)
( reflexive)
(D-T2)
( symmetric)
(D-T3)
( transitive)
(D-T4)
( renders transitive)
(D-T5)
( renders transitive)
(D-T6)
(of two entities, one is either of lesser, equal, or greater dimension than the other)
The theory of spatial containment
The primitive relation of spatial containment, , is a reflexive, antisymmetric, and transitive relation (C-A1–A3) with the zero region being defined as the only region not containing itself (C-A4).10
This is a somewhat arbitrary choice without deeper implications, but captures the intuition that the zero entity is not really a region that is located anywhere. Rather, it is a mathematical abstraction introduced primarily for convenience and totality.
(C-A1)
( reflexive and definition of )
(C-A2)
( antisymmetric)
(C-A3)
( transitive)
(C-A4)
(zero region never in relation)
Contact becomes definable without any dimensional constraints (C-D) as expected (i.e., regions are in contact if they “share a common region”) as long as the theory is mereologically closed, that is, for any two regions in contact there is a shared region in the domain. This further motivates the need for the intersection operation.
wherein containment is provably extensional (C-T1), that is, any region is identifiable by its unique set of contained regions. It is also provable that contact is reflexive (except for the zero region, which is not is contact with anything), symmetric, and containment is monotone with respect to contact (C-T2–T5).
(C-T1)
( extensional)
(C-T2)
(C reflexive)
(C-T3)
(C symmetric)
(C-T4)
(nothing in contact with null region)
(C-T5)
( implies C monotone)
The combined theory
A single axiom relates the primitive notions: if x is contained in y, then y must have at least the dimension of x (CD-A1).
(CD-A1)
(a contained entity is of the same or a lesser dimension)
Parthood and proper parthood are defined as unidimensional variants of containment (EP-D, EPP-D) with parthood being – just like containment – reflexive (EP-T1), antisymmetric (EP-T2), transitive (EP-T3), and extensional (EP-T9).
(EP-D)
(equidimensional parthood)
(EP-T1)
(P reflexive)
(EP-T2)
(P antisymmetric)
(EP-T3)
(P transitive)
(EP-T9)
(P extensional)
(EPP-D)
(equidimensional proper parthood)
and denote minimal (i.e., indivisible, not containing any proper parts) and maximal (i.e., not a proper part of another region) entities within a dimension (ME-D1,D2). To prove decomposability later on, we need to restrict the theory to models that are atomic, wherein each region must contain some minimal part (ME-E1).
(ME-D1)
(maximal in a dimension)
(ME-D2)
(minimal in a dimension)
(ME-E1)
(nonzero regions have a minimal part)
Three specialized symmetric contact relations become definable: partial overlap when two regions of equal dimension share a region of the same dimension (e.g., the 2D regions in Fig. 1(b) share a 2D part; PO-D);12
Our use of differs from the use in most unidimensional mereotopologies, e.g., by the RCC (Cohn et al., 1997) or others discussed by Casati and Varzi (1999), where disallows full containment, a notion expressible here as . In that sense, our relation is closer to RCC’s O relation.
incidence when a region shares a part with a higher-dimensional region (e.g., in Fig. 1(c) the curve shares a segment with the 2D region, and in Fig. 1(a) the 1D region l is contained in the 2D region r; Inc-D); and superficial contact when two regions share a lower-dimensional region (e.g., the 2D regions r and s share 1D region l and point p in Fig. 1(a); SC-D). Together, the three relations are an exhaustive and mutually exclusive set of subrelations of contact (Hahmann and Grüninger, 2011b). Refer to Hahmann (2013, Ch. 6) for a detailed discussion of the contact relations.
(PO-D)
(anything shared by two regions in superficial contact must be of a lower-dimension)
Lattice of contact relations
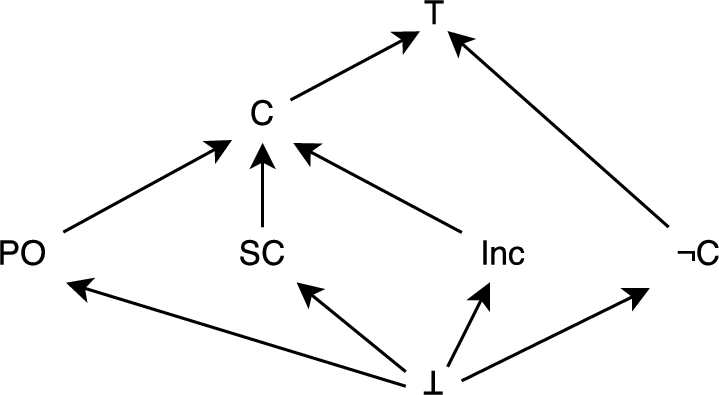
The three defined relations , , and form a set jointly exhaustive, pairwise disjoint (JEPD) specializations of contact C in shown in Fig. 3. This is proved via the following theorems, where CD-T1 to T4 show that the three relations are exhaustive subrelations of C and CD-T5 to CD-T10 show that they are pairwise disjoint.
Lattice of the contact relations in .
(CD-T1)
( specializes C)
(CD-T2)
( specializes C)
(CD-T3)
( specializes C)
(CD-T4)
(, , and are exhaustive w.r.t. C)
(CD-T5)
(CD-T6)
(CD-T7)
(CD-T8)
(CD-T9)
(CD-T10)
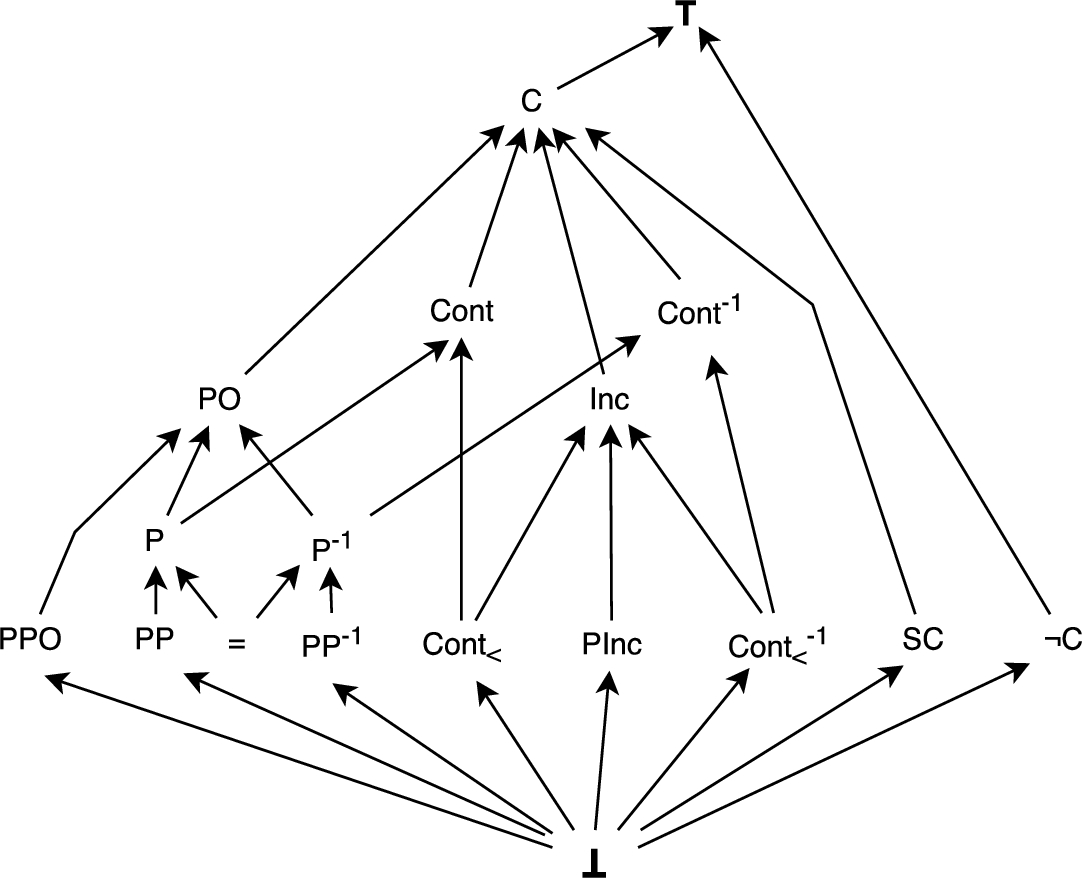
Lattice of nine base relations in based on containment and contact.
To construct a complete lattice of the various contact and containment relations, we introduce four more definitions purely for brevity and convenience:
(DC-P)
(disconnection)
(PPO-D)
(Proper partial overlap)
(PInc-D)
(Proper incidence)
(-D)
(Lower-dimensional containment)
By proving two more specializations (C-T6, -T1), we have constructed the lattice of spatial relations for
shown in Fig. 4. It consists of the nine jointly exhaustive, pairwise disjoint (JEPD) base relations , , =, , , , , , and .
(C-T6)
(-T1)
Extending with downwards closure operations
This section presents our axiomatizations for the closure operations of intersection and relative complement (difference) as extension to and . We verify that the operations are well-defined functions, i.e. for each pair of elements x, y, only one element qualifies as potential intersection and only one as potential difference, and show that the axioms suffice to guarantee that , the extension of , satisfies the decomposability property, which requires all entities to be decomposable into a set of non-overlapping and jointly covering minimal entities. The proposed axioms for the operations are informed by Gotts’ previous work (Gotts, 1996) and Casati and Varzi’s detailed study of mereological and topological closure operations in unidimensional mereotopologies (Casati and Varzi, 1999) but go beyond those used in prior multidimensional mereotopologies by not restricting the operations to only pairs of entities of equal dimension.
If we want to ensure that the entities resulting from the operations are again of uniform dimension (i.e., each component of such a region is of the same dimension), the closure operations must be necessarily lossy in that they lose pieces of the intersection or difference that are of lower dimensions than other pieces. As the result, the operations violate a number of properties typically associated with product and difference operations in set theory, such as associativity of intersections: .
Intersections
We already have distinguished contact relations depending on the relative dimensionality of the shared region. But this only considers the shared region of greatest dimension. Consider for example Fig. 1(a): the two 2D regions r and s share l as a common piece of boundary (a 1D region) but also the point p (a 0D region), which is unrelated to l. Likewise, a 1D curve could properly intersect a 2D region in a curve segment, while also meeting the 2D region at a separate point. The problem with these cases is that the full intersection could consist of scattered pieces of varying dimensions. To yield a valid region we must ensure that the pieces are of uniform dimension. This is achieved by dropping extra lower-dimensional pieces from the intersection, thus defining the intersection as the maximal intersection of highest dimension among all entities shared by the regions x and y (Int-A1–Int-A4). This intersection could still consist of scattered parts (e.g, the intersection between x and y in Fig. 1(c)) as long as they are of equal dimension. All other, lower-dimensional entities are lost unless they are contained in the intersection of highest dimension, in which case they are still contained in the intersection by transitivity of containment.
We can now verify that the intersection operation · is well-defined in , that is, for every pair of elements x, y, one and only one element meets all requirements from Int-A1–Int-A4 to serve as .15
By the nature of · being a function, for every model and every of elements x, y in its domain , some entity exists such that . Thus, we only need to prove that no other entity in satisfies the axioms Int-A1–Int-A4 as well. The same applies to the proofs for Theorems 2 and 3.
The operation · is well-defined in, that is, any two modelsandofwith equivalent extensions for all non-logical symbols apart from · must have equivalent extensions.
In other words, if two modelsandofwere equivalent (i.e. with equivalent domains and predicate extensions) except for their interpretationsand, then for arbitrary(and thus, because of the equivalence,), ifand, then.
Let and be arbitrary models with x, y being arbitrary elements in their domains . Then we need to prove that any two that satisfy all conditions for and are indeed equivalent.
Since · is a function, some entity exists such that .
The bold symbols, such as or are used to refer to the predicates’ extensions in a model . But for any of the dimensional comparison predicates, we use a bold infix notation, such as , instead of the longer statement to denote that x is related to y in a model .
(2) when .
Case (1): where satisfies all conditions: Int-A1 is trivial, while Int-A2, Int-A3, and Int-A4 are vacuously true because and and by C-A4 and EP-D. Moreover, by D’-A4, there is a unique z with in the model. So if , we must have because the two extensions of are identical. If , then as shown in the proof of Int-T6 (the converse direction of Int-A1). Then we also have . But by Int-A1 this contradicts that .
Case (2): Assume . Then by C-D, there must exist some such that . Let be the set of all that satisfy this condition, i.e.
Any satisfies Int-A1 (vacuously) and Int-A2 when substituted for and . Further, because the entities in Z form a bounded discrete linear pre-order by D’-A6 to D’-A9 with some maximal dimension, a non-empty subset of the elements of greatest dimension within Z exists, defined as
Any element from that is chosen as the intersection or then satisfies Int-A3. Int-A4 further postulates that at least one region, denoted as , in contains all regions in (i.e. that are both contained in x and y and of the same dimension as ) as parts. Likewise, contains all regions in .
Because the extensions and are equivalent, we have and . Thus, by EP-T2. □
Typical properties of intersection/product operations are: commutativity (), idempotence (), existence of an identity 1 (), existence of a zero element 0 (), and associativity ().
Commutativity and idempotence are easily proved (Int-T5,T10), and the zero region serves as null element (Int-T13), while an identity element would require postulating that a universal region that contains every nonzero region exists: . The theorems Int-T6–T9 further verify the correct dimensionality of the intersection for the four exhaustive cases of – the only case that leads to an empty intersection – and the three pairwise disjoint, jointly exhaustive kinds of connection partial overlap , incidence , and superficial contact .
Note that Int-T6 simplifies the proof of Int-T5, thus we proof Int-T6 first.
(Int-T6)
(zero intersection only for disconnected entities)
(Int-T7)
(for partial overlap is of the same dimension as both intersecting entities)
(Int-T8)
(for incidence has the same dimension as one of the intersecting entities and a lower dimension than the other)
(Int-T9)
(for superficial contact is of a lower dimension than both x and y)
(Int-T10)
(· is idempotent)
(Int-T13)
(existence of a null element for ·)
Associativity, that is, the identity , is the only property of the set-theoretic intersection operation that is no longer guaranteed in our multidimensional mereotopology in cases where one of the intersections or is nonuniform as exemplified in Fig. 1(a). Our intersection operation satisfies only weaker forms of associativity, known as the left- and right-alternative laws (Int-T11,T12), because of the way it is defined to drop lower-dimensional pieces from the intersection.
(Int-T11)
(· left-alternative)
(Int-T12)
(· right-alternative)
Differences
Models of unidimensional mereotopologies are usually closed under complementation in the sense that some universal region U exists that contains all other nonzero regions, and every region y has a complement . But even without a universal entity, it is reasonable to require that relative complements exist: any region y that is a proper part of a region x has a nonzero relative complement . Inspired by set theory, we refer to − as the difference operation.
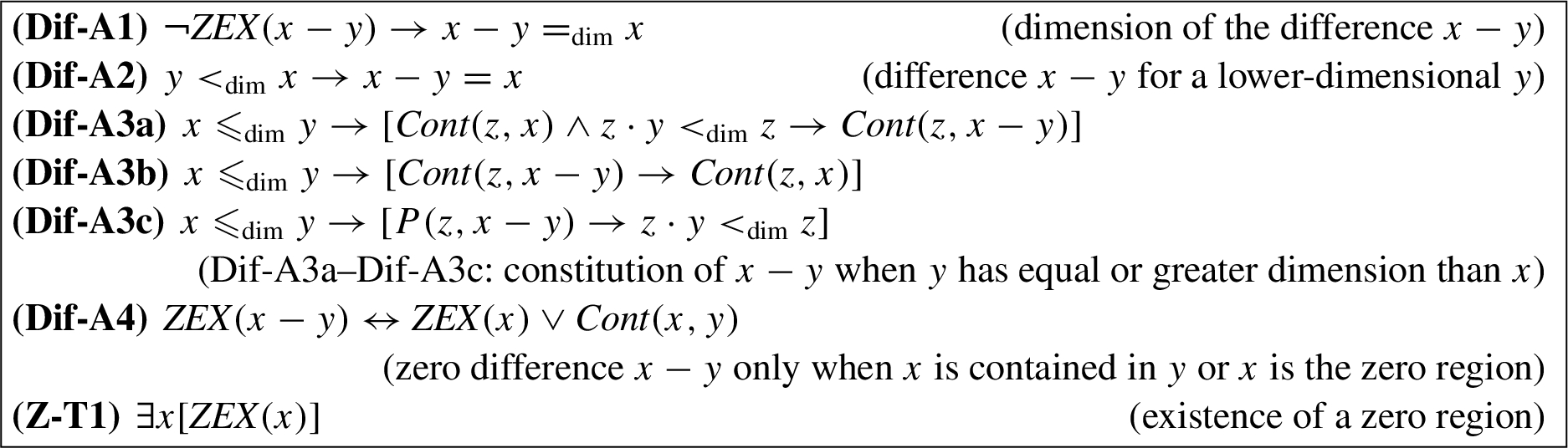
To ensure that in a multidimensional mereotopology the difference has a uniform dimension, we again only take the pieces of largest dimension into account, similar to how the intersection operation drops lower-dimensional pieces in the intersection. Thus, whenever the difference is not empty, it has the same dimension as the minuend x (Dif-A1). For two regions of equal dimension, the difference matches the definitions from unidimensional mereotopology (Galton, 1996; Gotts, 1996), as exemplified by the difference between the 2D regions in Fig. 1(b). Likewise, the difference between two 1D regions, e.g. between y and in Fig. 1(c), is a 1D region. This idea extends to differences whose subtrahend is of a greater dimension than the minuend (Dif-A3), as exemplified by the difference between the line segment y and the 2D region x in Fig. 1(c), which is a line segment that is a proper part of y. But when the minuend is of a greater dimension than the subtrahend, the difference must be the minuend itself (Dif-A2), ignoring missing lower-dimensional artifacts (e.g., in Fig. 1(c)). This works in general because the intersection never has a greater dimension than either of the intersecting regions. Dif-T7 verifies that the difference between x and y is indeed equivalent to the difference between x and the intersection of x and y. Dif-A4 captures the exact conditions when the difference may be empty: either the minuend is zero or the minuend is contained in the subtrahend. From reflexivity of for nonzero regions, it follows that is always the zero region.
Because − is a function, differences must exist even for any combination of two entities, including the difference , which must be the zero region. Thus and both entail that some zero region must exist (Z-T1).
We next prove theorems about the behavior of the difference operation that are prerequisites to prove that it is a well-defined function and satisfies the desired supplementation principles from unidimensional mereotopology. The first three theorems Dif-T1–T3 confirm the relationship of to x and y. More precisely, they show that the difference correctly deals with all the parts of x and y: (1) is a part of x (unless it is empty) (Dif-T1); (2) if y is a proper part of x, then the complementary difference is also a proper part of x (Dif-T2); and (3) nothing can be a part of both y and (Dif-T3).
(Dif-T1)
(a nonempty difference is part of x)
(Dif-T2)
(for a proper part y of x, is also a proper part of x)
(Dif-T3)
(y and do not partially overlap)
The next theorems consider the interaction between the intersection and difference operations. Dif-T4 confirms that the intersection and the difference never overlap, while Dif-T5 shows that the difference can be described in terms of parthood alone.20
Recall that denotes overlap in a part rather than proper overlap and thus includes full containment. Thus is the most general overlap relation between unidimensional entities similar to O as used by Casati and Varzi (1999), Cohn et al. (1997), and Randell et al. (1992).
Dif-T6,T7 capture further interaction between the intersection and difference operations that are maintained from intersections and differences in set theory, ensuring that holds as expected. Dif-T6 specifically confirms the remainder principle known from mereology (Simons, 1987).
(Dif-T4)
( and do not partially overlap)
(Dif-T5)
(parts of the difference )
(Dif-T6)
( and are identical)
(Dif-T7)
( and its intersection with x are identical)
The last three theorems Dif-T8–T10 verify that the difference operations works correctly in borderline case: (1) for a part y of x, y is the difference between x and (Dif-T8); (2) for identical regions x and y, both differences and are empty (Dif-T9); and (3) regions in superficial contact, which only share a lower-dimensional region, the difference equals x and, likewise, .
(Dif-T8)
(− involutary)
(Dif-T9)
(− anticommutative)
(Dif-T10)
(difference between entities in superficial contact)
In set theory, the intersection and difference operations are interdefinable through the equivalence . Because of ’s lossy operations that ensures all regions have uniform dimensions, the same equivalence is not guaranteed as demonstrated by x and y in Fig. 1(c): yields a segment of y, while because y has a lower dimension than x. Then , yielding the zero region rather than the lower-dimensional intersection of x and y. Thus, intersections and differences must be axiomatized separately in though many of the relationships between the operations from set theory are still preserved.
Supplementation and extensionality principles
Important criteria for evaluating unidimensional mereological and mereotopological theories are supplementation principles (Casati and Varzi, 1999; Simons, 1987). Its weakest form requires each part of a region to be complemented by some other non-overlapping part of the same region (EP-E1). The stronger variant requires every region that is not a part of x to have a proper part that does not overlap x (EP-E2) and thus is also not a part of x. Both are provable in . While EP-E1 and EP-E2 only consider the supplementation by equi-dimensional entities, EP-E2 can be further generalized to multidimensional cases: every region y not contained in x has a part z such that the intersection is of a lower dimension than z (EP-E3), meaning that z does not share a part with x. EP-E3 is also provable in . In fact, all of three principles are consequences of the remainder principle (Dif-T6), which strengthens strong supplementation further.
These supplementation principles are a crucial step towards our ultimate goal of establishing decomposability for regions in models of such that every region is identified by a finite sum of minimal parts. Towards this goal, strong supplementation already entails that the partial overlap relation is extensional (PO-E2) in , which ensures that every entity is uniquely identified by its overlapping regions. This also means that monotonicity of the relation implies parthood.
(PO-E1)
(monotonicity of implies parthood)
(PO-E2)
( extensional)
Dif-T5 together with extensionality of parthood (EP-E9) now help prove that the difference , like the intersection operation ·, is indeed well-defined for every pair of elements x, y in a model of .
The operation − is well-defined in, that is, for any two modelsandofwith identical extensions of all predicates and of ·, ifwithand, then.
Let and be two models of with identical extensions of all predicates and of ·. Let x and y be two arbitrary entities in .
Since − is a function, some entity exists such that . It remains to prove the uniqueness. Suppose that and .
If , then by Dif-A2, and also , thus .
If , then by Dif-A4, and . Then by D’-A4.
Now assume . If , then by Dif-A4 and further by the theorems assumption and then again by Dif-A4. Analogously, if then . In either case by D’-A4.
Now assume that and , that is, .
Then by Dif-T1 and hence by EP-D. Analogously .
We can use Dif-T5 to determine the set of parts of both differences and . Note that the set of parts of x, i.e. the with , is unique by EP-T9.
If , then and , both by Dif-T5.
If , then by Dif-T5, iff . Likewise, iff .
Since , and by the theorem’s assumption, we have iff . Hence by EP-T9. □
A model of (top) decomposed by intersections and differences into its atomic entities: points p1–p7 (right), linear features l3, which is not further decomposed, and l7–l19 (center), and areas a4–a8 (left), shown in the bottom figures. Non-atomic entities are sums of atomic ones, e.g., and (the boundary of a2) equals to . Because of the existence of complements, additional non-atomic entities are entailed to exist: and .
Decomposability of atomic models of
Extensionality of the relation (PO-E2) means that any entity in a model of is fully described by the entities it overlaps. For atomic models we can go a step further by proving that each region can be decomposed into a set of minimal, covering and non-overlapping parts. This property, called decomposability (Varzi, 2007) and illustrated by Fig. 5, holds in many mereologies and unidimensional mereotopologies. We now confirm that decomposability follows in the atomic version of our multidimensional mereotopology from the extensionality of (PO-E2) and the strong supplementation principle (EP-E2). It can also be captured as the logical sentence PO-E3.
(PO-E3)
( extensional for minimal entities)
The property may not hold in non-atomic models, where some entity may contain infinitely many smaller parts.
In any model of all nonzero regions contain some minimal, i.e., indivisible, proper part. Proving decomposability then amounts to showing that the models are atomistic, that is, proving that every two partially overlapping regions share some minimal part. Then, any region is the sum of its minimal parts and those minimal parts uniquely define the region. This also means that each region in contact with a given region x shares a, possibly lower dimensional, region contained in some minimal part of x. In other words, the containment of lower-dimensional regions in models of the multidimensional mereotopology does not significantly alter the models’ structure that is still defined – as in most unidimensional mereotopologies – by (equidimensional) parthood. Instead, the additional structure from containment of lower-dimensional works within the confines of the models’ parthood structure.
Letbe a model of. Then every entityhas a unique set of minimal parts that partition the entity.
Let be a model of with domain .
By ME-E1, we have .
Recall that by PO-E2, every entity has a unique extension of that involves x: .
Choose an arbitrary . We need to prove that x has a unique set that relates x to the minimal entities it overlaps:
Now suppose there exists another entity with that partially overlaps the same set of minimal entities as x, i.e., . From , either (i) or (ii) .
Consider the case (i) when . Then by EP-E1, some exists such that and . Then by EP-D and C-A4. Then by ME-E1, some minimal entity exists such that and hence by transitivity of P (EP-T3) and by PO-D. But at the same time by PO-D. Hence and by PO-D.
Consider the case (ii) where . Then by EP-E2 some exists such that and . Such a w would – by ME-E1 – contain a minimal entity . Then but , which contradicts the assumption that and x partially overlap the same minimal entities.
Notice that because every entity is minimal, i.e., each y has itself as only part, we conclude by definition PO-D that . Thus, any region x is uniquely defined by its minimal parts, i.e., by the set , in a model of . □
Because distinct minimal entities cannot overlap and entities that partially overlap must share a minimal part, the minimal parts of a region x form a spatial partition of x: they are pairwise non-overlapping and they are exhaustive, i.e., any other region in contact with x must be in contact with one of its minimal parts.
Extending with a sum operation
The previous section has focused on downwards mereological closure operations that decompose spatial entities into their minimal parts. Similarly, we can close models of the multidimensional mereotopology upwards by introducing sums of every pair of entities. While arbitrary sums are not always meaningful as discussed to length by Casati and Varzi (1999), they are still valuable when the domain of discourse are abstract spatial regions rather than physical or other kinds of objects. For that reason, most unidimensional and multidimensional mereotopologies postulate the existence of arbitrary sums. But postulating the existence of sums of arbitrary entities may again lead to entities of nonuniform dimension. For example, the sum consisting of a region, a line, and a set of points in which the line and the points are not contained in the region is not of uniform dimension and as such cannot be an entity in a model of our multidimensional theory. But consistent with our formalization of intersections and differences, we can treat sums of entities of different dimensions as the sum of the entities contained in the entity of higher dimension (Sum-A3). The sum of two entities of different dimensions will always yield the higher-dimensional entity (Sum-A2). That means sums will only be meaningful for two equidimensional entities, just as in other multidimensional mereotopologies (Baumann et al., 2016; Galton, 1996; Gotts, 1996). Note that our axiomatization of closure under sums requires models to already be closed under intersections and differences. Sum-A4 then ensures that the sum and difference operations interact correctly.
In the extended theory , the theorems Sum-T1–Sum-T6 verify basic property of the sum, such as idempotence (Sum-T2) and associativity (Sum-T7), the expected behaviour when the zero entity (Sum-T3,4) or two equidimensional entities (Sum-T5) are involved, and the correct interaction with the containment and partial overlap relations (Sum-T1, Sum-T6).
(Sum-T1)
(every z contained in has some part contained in x or in y)
(Sum-T2)
(+ idempotent)
(Sum-T3)
(zero sum of zero entities)
(Sum-T4)
(sum with zero entity)
(Sum-T5)
(dimension of the sum of equidimensional entities)
(Sum-T6)
( partially overlaps anything that overlaps either x or y)
(Sum-T7)
(+ associative)
Sum-T6 is also necessary to prove that the sum operation is, similarly to the intersection and difference operations, well-defined for any pair x and y in a model of .23
The operation + is well-defined in, that is, for any two modelsandofwith identical extensions of all predicates, ifwithand, then.
Let , be two models of with equivalent extensions for all predicates (but not necessarily for +). Let x and y be arbitrary entities in their domains .
Case 1: Assume x and y have different dimensions, i.e., . Then the sums and are uniquely defined as x (if ) or y (if ) by Sum-A2 and Sum-A1 and thus .
Case 2: Assume . Then ’s extension of for , i.e. the set defined as , is uniquely determined by Sum-T6 as
Likewise,
With by the theorem’s assumption, follows. Hence by extensionality of PO (PO-E2), . □
We now proceed to prove that every part in the sum can be split into parts u and v so that and without (Sum-T9) and that the sum of two parts of z is also a part of z (Sum-T10). In other words, the sum does not contain a part that is neither in x, nor in y, nor can be divided into two parts that are in x and y, respectively. To prove Sum-T9, we first prove Sum-T8, which establishes that the difference and sum operations cancel each other out for two entities in a parthood relation, i.e., if we subtract a part y from x and then add it again, we obtain x again. This then allows to prove the more general relationship Sum-T8’ that ties the intersection, difference and sum operations together by showing that the sum of the intersection and the difference is again x – regardless of the relative dimensions of x and y. In that way, Sum-T8’ captures the essence of Dif-T5 using the sum operation. Note that Sum-T8’ is a special case of Sum-T8 because a nonemtpy intersection is always contained in x, and is always a part of x as long as they are of equal dimension.
Sum-T8’ then proves the first of six conditions in Sum-T9 when a w is contained in the sum but not fully contained in either x or y. Sum-T9’ is a more general expression of Sum-T9 using existential quantifiers. Sum-T9 helps us then with the proof of Sum-T10, which verifies that the sum of two parts of z is also a part of z and vice versa.
(Sum-T8)
(any part y of x and the difference cover x)
(Sum-T8’)
( and cover x)
(Sum-T9)
(Any w in is either in x, in y, or can be split into non-overlapping parts and contained in x and y)
(Sum-T9’)
(everything contained in but contained neither in x nor in y is the sum of two non-overlapping parts contained in x and y)
(Sum-T10)
(the sum is part of z iff x and y are part of z)
In a final step towards a full characterization of the models of , we are studying distributivity. Most importantly, for two entities y and z of equal dimensions, a third entities’ intersection distributes over their sum (Sum-T11) and its sum distributes over their intersection (Sum-T14). If y and z are not of the same dimension, this is not necessarily true. In Fig. 5, for example, consider the intersection . Because is of a greater dimension than , the line segment is dropped from the sum . Then . But the sum is larger, namely , because the intersections and are of the same dimensions and the piece that happens to be contained in is no longer dropped.
Finally, we prove that x’s sum of the difference with a second entity y is the union of the two entities (Sum-T20) – as is the case for set union and difference. Sum-T8 can then be considered a special case of Sum-T20. Sum-T20 is the final missing piece for the subsequent representation of the finite models of .24
Additional properties about how the sum operation interacts with intersections and differences have been presented in (Hahmann, 2013) but are omitted here as they are not necessary for Theorem 5.
(Sum-T11)
(· distributive over + when the operands are of equal dimension)
(Sum-T14)
(+ distributive over · when the operands are of equal dimension)
(Sum-T20)
(special case when + distributes over −)
A model-theoretic characterization of
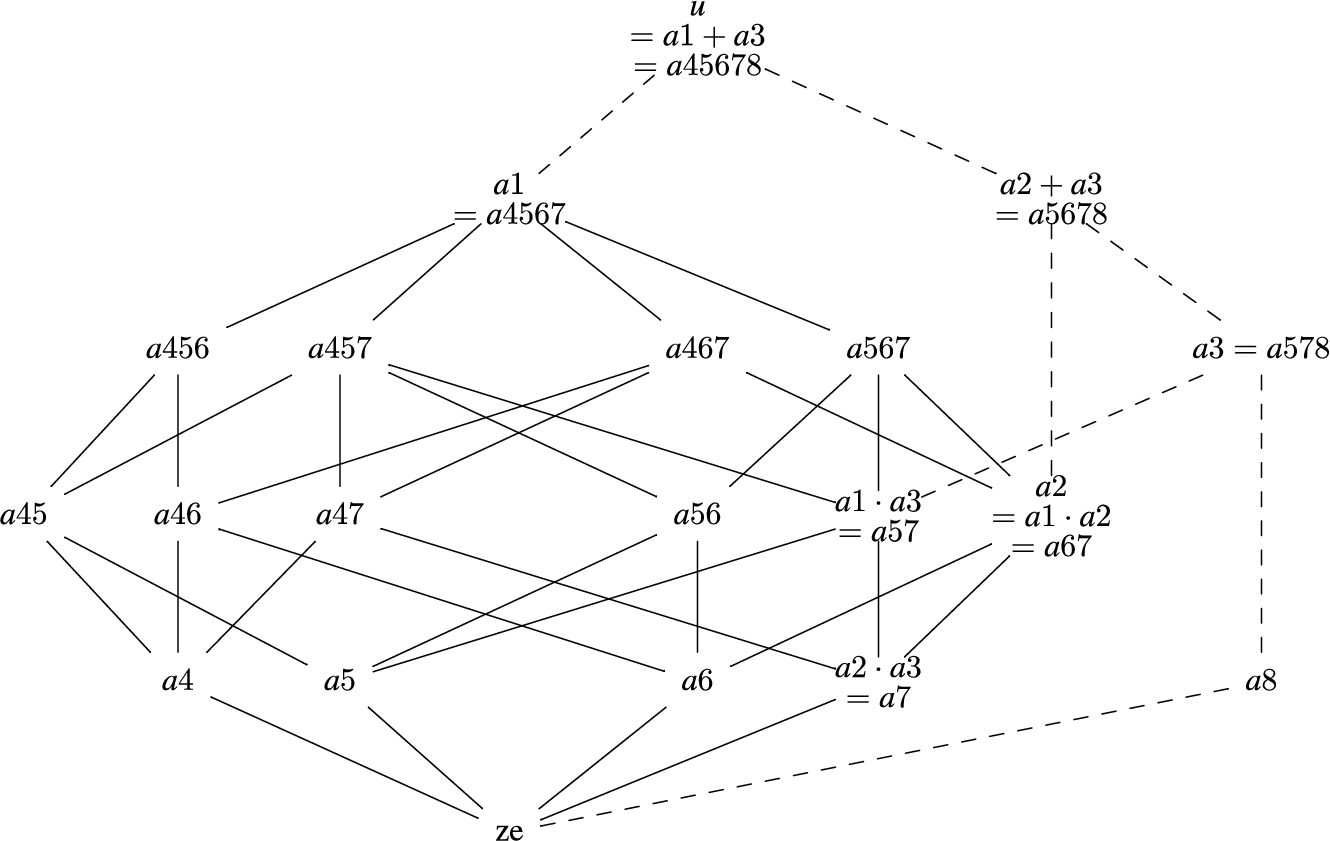
We can now show that a model’s extension of the parthood relation in a model of is always partitioned into jointly exhaustive, pairwise disjoint substructures of parthood, each of them forming a Boolean algebra (see Fig. 6 for an illustration of the Boolean structure that arises from the 2D regions of the model shown in Fig. 5). Contact between entities within each Boolean substructure is reduced to partial overlap , which manifests itself as a non-zero meet within the Boolean algebra. While two entities of the same dimensions can also be in superficial contact, this relation is not manifested in the Boolean substructure but requires identifying a common contained entity in another Boolean substructure of the model. Across the Boolean substructures, entities can be related via incidence or superficial contact . Both relations manifest themselves as a non-zero meet over the partial order defined by the relation as . Then, the partial order within each Boolean substructure – defined as – is the subset of the relation ⩽ where the entities are in a parthood relation.
Hasse diagram illustrating the 16-element Boolean substructure formed by all combinations of the atomic 2D entities , , and from Fig. 5. With the fifth and last atomic entity , the full Boolean substructure would have entities for this particular dimension. But to avoid cluttering the illustration, sums involving the atomic entity are only included where it corresponds to “genuine” sums that involve the named objects , , or from the original configuration at the top of Fig. 5. The ordering relations involving are shown using dashed lines.
More formally, the relation is an equivalence relation and thus partitions the domain of any model of into sets of entities of equal dimension. The parthood relation P defines a partial order within the set for each dimension and each set defines a mereological field, that is, with the zero entity added as least element (i.e., lower bound), the entities of each dimension form a Boolean algebra.
We have used the model finders Paradox and Mace4 to construct a model consisting of exactly 2 elements. They can be found at http://colore.oor.net/multidim_mereotopology_codi/output/codi_down_sum.par.out and http://colore.oor.net/multidim_mereotopology_codi/output/codi_down_sum.m4.out, respectively.
ofwith a finite domainof size.
For eachwith, letbe its set of equidimensional entities withas the unique entity inthat is included in every.26
Note that is always a singleton set by D’-A4 and Z-T1.
Throughout the proof, we use +, ·, and − to refer to , , and , respectively.
where
; and
Then
Each structureis a substructure ofclosed under −, +, and × and with a unique maximal element max;
Each structureis a Boolean algebra;
Anyis in a setfor exactly one structure.
We need to show that for any . We also need to show that a unique exists.
Assume a, b to be arbitrary entities in . Then by definition.
Closure under intersection ×: If , then and by Int-T7. Hence by the definition of . Otherwise, with by definition.
Closure under difference −: By Dif-A1, we have and thus unless in which case .
Closure under sum +: Since , follows by Sum-T5 and thus .
A uniqueexists: By the definition of it is finite and contains at least one entity a such that and thus is non-empty.
Now suppose two distinct entities exist. Then by definition of , and, by Sum-A3 and thus . Unless , we either have or , which would contradict our assumption that both and are in (see ME-D1).
Any distributive bounded lattice equipped with an operation of unique complementation is a Boolean lattice (algebra).
First we show that each structure is a bounded distributive lattice if we define for all ,
Let a, b, c be arbitrary entities in . Then and thereby:
+ defines a supremum, i.e., join operation: because by Sum-T5, Sum-A3, and C-A1 except when , but by definition. Hence is an upper bound for a (and, analogously, for b).
Now suppose that is not the least upper bound, i.e. some exists such that but . We will prove that every that overlaps (i.e. ) also overlaps d (i.e. ). Assume for some . Then by PO-D and EP-D, and further, by Sum-T6 or . In either case, by and the definition of ⩽ in the lattice, . Hence as desired. Hence by PO-E1, and hence is the least upper bound of a and b.
× defines an infimum, i.e., meet operation: because if , then by PO-D there exists a such that . Then by EP-D and thus . Further, and by definition. If , then by definition and hence .
is a minimum: by definition of ⩽.
max is a maximum: Suppose max is not a maximum, i.e., there exists an such that . Then . If then by definition. Otherwise by EP-E2, there exists a such that but . But since must exist (because + is a function) and (because ), then by Sum-T5 and by Sum-T6 and PO-E1. Because but (by Sum-T6), , hence by EPP-D and, further, by ME-D1 in contradiction to our definition of max.
× is distributive over +: because · is distributive over + by Sum-T11 for any . Note that if then by definition. Then by Sum-T6, iff . Analogously if .
+ is distributive over ×: holds by Sum-T14 together with being closed under × and +.
The only case of special concern is where . Then by the definition of ×, either or . In the former case, by Int-T6 and by CD-T1. In either case, .
Note that every entity with satisfies both and by Sum-T6. Reversely, if some exists with and , then because otherwise by Sum-T6 and , which by PO-D contradicts our observation that .
Thus by PO-E2, when .
It remains to show that the operation ′ defined as is a unique complementation operation in any structure . We have:
because by Sum-T20 and further because max is the maximum in , and
because by Dif-T3.
Since max is unique in every set , is uniquely defined by Theorem 2. Hence is a unique complementation operation.
Hence every structure is a uniquely complemented distributive lattice and thus by definition a Boolean lattice (algebra).
By its definition, it is clear that every is in . Now suppose there exists a such that and for distinct a and b. Then we have and as such by the nature of the equivalence relation used to define and .
Thus the sets partition the domain of a model of , with each structure defining a Boolean algebra that is a substructure of . □
Note that our characterization is restricted to models with finite domains because we cannot guarantee the existence of sums of infinitely many entities (at least not without employing infinite axiom schemas or second-order logic). However, the theorem extends to infinite models of in which a maximal entity exists in each dimension.
Automated reasoning: Consistency and proof verification
All the presented ontologies and the additional sentences provable from them are provided as computer-readable CLIF files via the Common Logic Ontology Repository (COLORE).28
http://colore.oor.net
While the CLIF syntax as specified in the Common Logic standard (International Electrotechnical Commission (ISO/IEC), 2018) includes many constructs and syntactic sugar, such as sequence markers or domain restrictions, that go beyond standard first-order logic, the ontologies presented here do not make use of these constructs. The utilized portion of CLIF includes: (1) the logical connectives “and”, “or”, “not”, “if” (implication), and “iff” (biconditional); (2) the quantifiers “forall” and “exists”; (3) variables, function symbols, and predicate symbols. The only additional construct used for the specification of the ontologies are file importation statements “cl:imports”, interpreted as the import closure as the set of logical sentences included in any CLIF file directly or indirectly imported by the specific CLIF file. To avoid having to use a logical translation from Common Logic to standard first-order logic as utilized by Mossakowski et al. (2013), we interpret the CLIF syntax over a domain of discourse limited to individuals (but excluding things like functions or relations) with a standard semantics of first-order logics instead of the semantics supplied by the Common Logic standard. By relying on standard first-order semantics, the CLIF files can be easily converted into other computer-interpretable formats for first-order logic, in particular the popular TPTP (Thousand Problems for Theorem Proving) syntax29
The BNF specification of the TPTP syntax is available from http://www.tptp.org/TPTP/SyntaxBNF.html.
that is implemented by the majority of theorem provers and model finders that partake in the annual CADE Automated Theorem Proving System Competition (CASC).
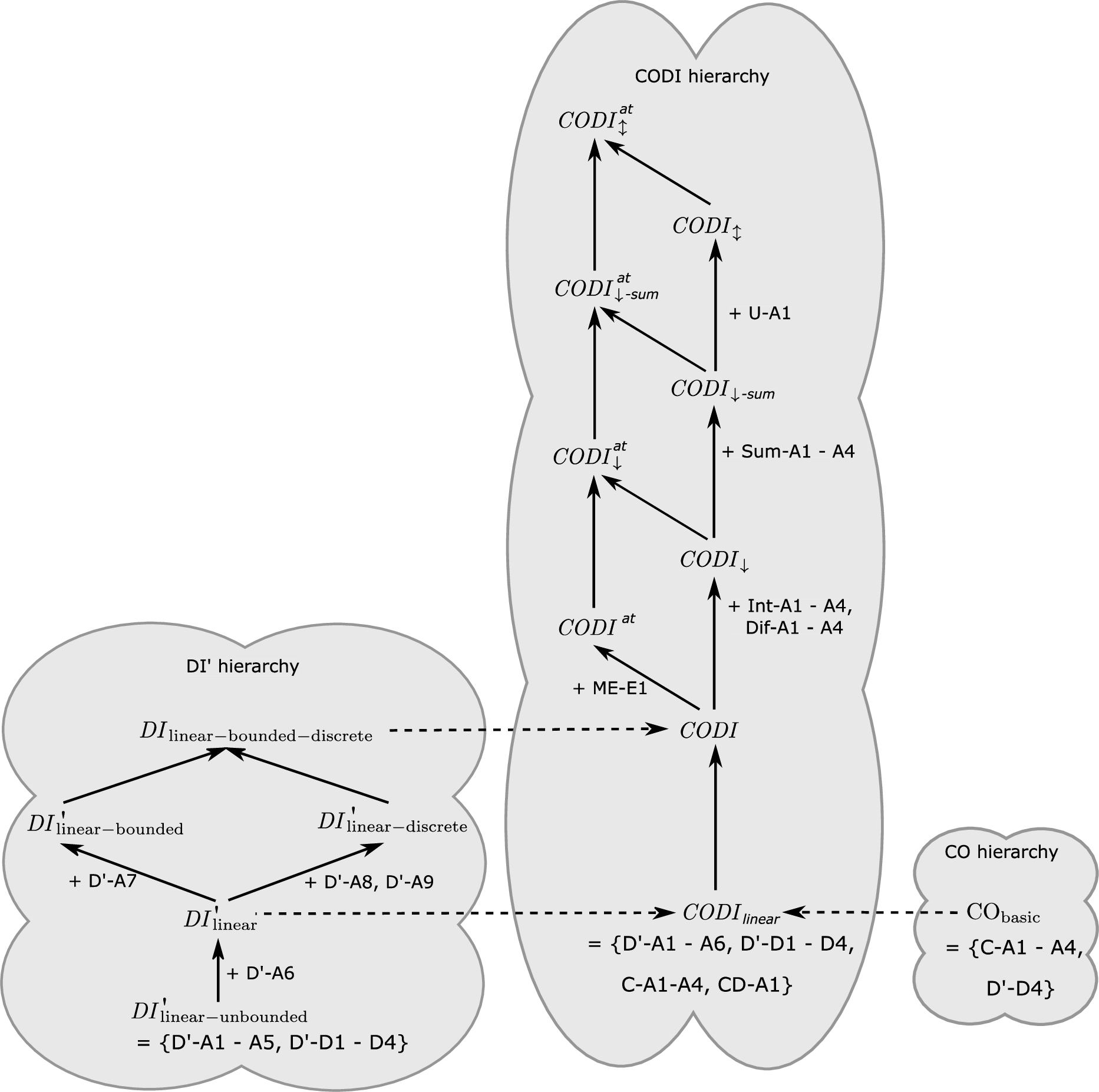
The hierarchies , and with selected ontologies therein. Solid arrows indicate non-conservative extensions (i.e., addition of axioms) without changes to the primitive signature (i.e., any additional symbols are defined functions or predicates), while the dashed arrows indicate extensions of the primitive signature. is a conservative extension of and of , meaning that every model of can be expanded to a model of and every model of can also be expanded to a model of . However, that does not mean that any model of can be combined with a model of to form a model of .
The ontologies are structured hierarchically using logical relationships based on conservative, non-conservative and definitional extensions, as described by Grüninger et al. (2012). As shown in Fig. 7, the ontologies are placed into three hierarchies: 30
http://colore.oor.net/multidim_mereotopology_dim
for the various strengths of axiomatizations of the relative dimension relations from Section 3.1; 31
http://colore.oor.net/multidim_mereotopology_cont
that contains the basic axiomatization of the relation of spatial containment and the definable contact relation from Section 3.2; and 32
http://colore.oor.net/multidim_mereotopology_codi
that combines the two primitive signatures and further adds the (implicitly defined) functions ·, −, and +. Following the work of Grüninger et al. (2012), each hierarchy is structured using non-conservative extensions. Axioms that are deemed essential to the axiomatized concept specify the least restrictive so-called root theory of the hierarchy, while additional optional axioms capture ontological choices that may be applicable (and necessary) in some scenarios but not in others. For example, the least restrictive ontology in the hierarchy omits D’-A6–A9 (Hahmann and Grüninger, 2011b): D’-A6 forces the set of dimensions to form a linear order, D’-A7 forces the existence of some maximal dimension, and D’-A8 and D’-A9 force the dimensions to be discrete. While in some settings these assumptions may be unnecessary or even undesirable, this root ontology is also extended to more restrictive ontologies that include some or all of these assumptions, such as the ontology . These extensions may better reflect how humans typically conceptualize spatial dimensions. Each hierarchy also provides a set of explicitly defined predicates – so-called optional definitions – which are not used in any axioms, but which capture additional intuitive relations or operations. These definitions reside in separate files located in the definitions subfolder of a hierarchy.33
For example, the file http://colore.oor.net/multidim_mereotopology_codi/definitions/epp.clif axiomatizes the definitional extension of by proper parthood .
Likewise, theorems are stored as separate files – though typically grouped into sets of related theorems – located in the theorems subfolder of a hierarchy. This modular structure allows using specific subsets of definitions and theorems for specific automated reasoning tasks, thus keeping the size of the ontology that is reasoned with as small as possible and thereby increasing the chances for successful reasoning.
Consistency checking. During development, all ontologies have been checked for consistency and what we refer to as non-trivial consistency, which goes a step further by ensuring that models exist in which a predicate is true for some set of non-identical entities and, at the same time, false for some other set of non-identical entities. This is forced by pairs of existential statements and captures the idea that a relation that is always true (or false) for all pairs of entities is not particularly useful and most likely contradicts its intent. Since is the most restrictive ontology presented here, with all other ontologies being axiomatized by a subset of its axioms and definitions, its basic consistency proof34
suffices to establish the consistency of all ontologies presented throughout the paper. A second model wherein all primitive predicates, the most important other predicates, as well as the closure operations are forced to be non-trivial establishes non-trivial consistency of .35
Proof verification. We have used the automated theorem provers Prover9 (McCune, 2010) and Vampire (Riazanov and Voronkov, 2002) to verify the manually proved theorems presented in the Appendix. All theorems, which are identified by labels of the form XX-Tx, up to and including Sum-T6 have been verified in that way. The supplementation principles EP-E1, EP-E2, EP-E3 and the extensionality principles PO-E1 and PO-E2 have, likewise, been verified using the theorem provers. Only for some of the most complex sum theorems (from Sum-T7 on) were we unable to find automatic proofs. To facilitate successful automated theorem proving for the other theorems, many of them needed to be split or rewritten. We have, for example, often separated the – often trivial – zero case out (e.g., for Int-T5), have split the two directions of a biconditional into separate statements (e.g., for Dif-T9), or have re-expressed theorems (e.g., Dif-T6 and Dif-T7) using the antisymmetry of P (EP-T2) or the extensionality of PO (PO-E1). Nevertheless, the automated proofs are often structurally very different from the manual proofs presented in the Appendix. This is mostly because the theorem provers do not automatically employ the kind of case distinctions that we heavily make use of in the manual proofs. But we have also not intentionally tried to recreate the automated proofs in the presented manual proofs.
The input TPTP and Prover9 files and the proof results are shared on COLORE in the subfolders theorems/conversions and theorems/output of the respective hierarchies.36
http://colore.oor.net/multidim_mereotopology_dim/theorems/ for theorems D-T1–D-T6, http://colore.oor.net/multidim_mereotopology_cont/theorems/ for theorems C-T1–C-T5, and http://colore.oor.net/multidim_mereotopology_codi/theorems/ for all other theorems.
Note that for each theorem, only a single proof (found either by Prover937
E.g. http://colore.oor.net/multidim_mereotopology_codi/theorems/output/codi_int_theorems_1.p9.out.
E.g. http://colore.oor.net/multidim_mereotopology_codi/theorems/output/codi_down_theoremsEP-E1.all.vam.out.
) is provided because the employed macleod toolkit39
https://github.com/thahmann/macleod
runs the provers and model finders in parallel and terminates as soon as one of the reasoners successfully terminates.
Summary and conclusions
Mereotopology is at the core of many qualitative conceptualizations of space. But many existing axiomatization of mereotopological relations are restricted to a unidimensional view of space wherein all entities must have the same dimension, while the few existing axiomatizations of multidimensional mereotopology (Baumann et al., 2016; Galton, 1996; Gotts, 1996) limit their product/intersection, difference/complement, and sum operations to entities of equal dimension, which misses many viable entities whose existence could be inferred if one applies the operations to entities of different dimensions. This work axiomatically extends the multidimensional mereotopology by axioms that entail unique intersections, differences, and sums for all pairs of spatial entities regardless of their dimensions. As much as possible, the operations yield non-zero results. When applied to regions of equal dimensions, the operations’ results agree with those of unidimensional mereotopologies, thus corroborating earlier results (Hahmann and Grüninger, 2011a) that show that can be logically restricted to unidimensional theories if so desired.
As evidence that the defined operations behave as expected, it is verified that the intersection and difference operations satisfy key properties of set-theoretic intersections and differences. But due to both operations being inherently lossy, only two key properties cannot be preserved: (1) associativity of intersection and (2) interdefinability of intersection and differences. However, lossy definitions are a necessary compromise to avoid creating entities of mixed dimensions (i.e., a region with a protruding or missing line segment). For the same reason, the sum of two entities only yields a new, third entity if they are of the same dimension. It is shown that then the sum operation is distributive over intersections and vice versa.
It is further verified that the strong supplementation principle from mereology holds in the theory – and thus also in the extension that includes the sum axioms – and that the partial overlap relation is extensional. This suffices to prove decomposibility of all atomic models – and thus all finite models – of with the consequence that any spatial entity in such a model can be uniquely represented as the set of its atomic parts. This property increases the theory’s practical utility by allowing to represent complex entities of any dimension as sets of simple entities, similar to how geometric data models, e.g., ISO’s Simple Features standard (International Electrotechnical Commission (ISO/IEC), 2004), define complex linear (e.g., MultiLineString) and areal (e.g., MultiPolygon) features. only requires information about its two primitives, relative dimension and containment, between its minimal entities (rather than all entities) to completely represent a model and query its mereotopological relations between simple or complex entities. This is due to the following inferred definitions (proofs are supplied in the Appendix):
(-D)
(Contact)
(-D)
(Overlap in a part)
(-D)
(Incidence)
(-D)
(Superficial contact)
The characterization of all finite models of as sets of Boolean algebras that encode the decomposition of spatial entities into their parts can help implement these definitions compactly and efficiently because (1) parthood can be represented by the partial order of the Boolean algebras, (2) the minimal entities are the atoms of the Boolean algebras, and (3) is a total order over the Boolean algebras. Thus, to compute the four mereotopological relations C, , and , only non-equidimensional spatial containment spanning multiple Boolean algebras must be stored, while the Boolean algebras themselves encode the contact and parthood relation between for all entities of one dimension. This can be further limited to storing the relations between an entity and the largest lower-dimensional entities it contains – all other containment relations can be derived via transitivity.
’s approach avoids the high number of different mereotopological relations proposed by alternative mereotopological theories, such as GFO Space (Baumann et al., 2016) and from the spatial database and geographic information science communities (Clementini and Di Felice, 1995; Clementini et al., 1993; Egenhofer and Herring, 1991; McKenney et al., 2005), whose theories introduce a separate relation for each dimensional combination (e.g., 0D-1D, 0D-2D, 1D-1D, 1D-2D, etc.). Instead, provides a much smaller and more manageable set of relations. While the relative dimension relations or seem intuitive, their cognitive adequacy will require further study. But the outcome does not affect the usability of or , as the dimension information is already implicitly available in most geometric data sources, typically as a class of objects for each dimension (e.g. point, line, area, etc.). Thus, the proposed theories can be implemented on top of or in lieu of geometric data types.
Applications and future work
and extensions thereof have been used as underlying spatial theories for recent and still ongoing work on formalizing the kinds of physical endurants relevant to (hydro-)geology and related physical settings (Brodaric et al., 2019; Hahmann and Brodaric, 2013, 2012). A formal representation of contour lines as they are used in topography (Hahmann and Usery, 2015) is also based on . The intersection operation in particular has been key to define interesting real-world concepts such as the ‘opening of a void’ (i.e., where a depression or tunnel ends and meets the ‘outside’), which is a lower-dimensional spatial feature that acts as the interface between groundwater and surface water (Hahmann and Stephen, 2018; Stephen and Hahmann, 2017).
Several lines of future work are possible. Already ongoing work aims to study integrated geometric-qualitative spatial reasoning. For that purpose, is currently being extended – as outlined by Stephen and Hahmann (2019) – by a formalization of the geometric concepts and qualitative relations from the Simple Features Access model (SFA; International Electrotechnical Commission (ISO/IEC), 2004). This extension axiomatically restrict the qualitative formalization presented here with the help of defined concepts of point regions, curves, areal regions, and voluminal regions as outlined by Hahmann and Grüninger (2011a) in order to constrain the geometric types of spatial features from the SFA model. The next step aims to test geometric datasets’ consistency with . This not only adds external verification to the ontology (so far we have only proved internal consistency of the axioms) but would also evaluate our conjecture that this kind of multidimensional mereotopology generalizes geometric data models and can be used for qualitative reasoning over combinations of geometric and qualitative data. Then the expressivity and efficiency of this logic-based multidimensional representation can be better compared to alternative spatial reasoning approaches, such as composition-based reasoning, for applications where multidimensional mereotopological distinctions are necessary.
A second line of ongoing work further extends the developed theory with notions of boundary containment, as refinement of and to distinguish which contained entities are contained in the boundary or not. A third line investigates the relationship to other multidimensional mereotopologies, in particular, to the INCH Calculus (Gotts, 1996) and the RCC*-9 (Clementini and Cohn, 2014). A future closer comparison and potential integration with GFO Space (Baumann et al., 2016) would also shed more lights on how similar and GFO Space are in their assumptions about abstract space.
Footnotes
Acknowledgements
This material is based in part upon work supported by the National Science Foundation under Grant Number III-1565811. We also thank the anonymous reviewers at FOIS 2018 whose thoughtful comments helped improve the conference paper (Hahmann, ) on which this article builds, and especially Till Mossakowski, Antoine Zimmermann and a third anonymous reviewer for their thoughtful comments and careful proof-checking that helped improve the clarity and rigor of the final version of this article.
Proofs of the theorems of the presented ontologies
This appendix includes all proofs for the theorems that are provable from the axiomatization. Note that for all proofs, we assume to be an arbitrary model of the theory of the respective subsection with domain .
References
1.
Asher, N. & Vieu, L. (1995). Toward a geometry of common sense: A semantics and a complete axiomatization for mereotopology. In Int. Joint Conf. on Artif. Intell. (IJCAI-95) (pp. 846–852).
2.
Baumann, R., Loebe, F. & Herre, H. (2016). Towards an ontology of space for GFO. In Conf. on Formal Ontology in Inf. Systems (FOIS-16) (pp. 53–66).
3.
Biacino, L. & Gerla, G. (1991). Connection structures. Notre Dame J. of Formal Logic, 32(3), 242–247. doi:10.1305/ndjfl/1093635748.
4.
Blumenthal, L. & Menger, K. (1970). Studies in Geometry. Freeman.
5.
Brentano, F. (1988). Philosophical Investigations on Space, Time, and the Continuum. Croom Helm.
6.
Brodaric, B., Hahmann, T. & Gruninger, M. (2019). Water features and their parts. Applied Ontology, 14(1), 1–42. doi:10.3233/AO-190205.
7.
Casati, R. & Varzi, A.C. (1999). Parts and Places. MIT Press.
8.
Clarke, B. (1981). A calculus of individuals based on ‘connection’. Notre Dame J. of Formal Logic, 22(3), 204–218. doi:10.1305/ndjfl/1093883455.
9.
Clementini, E. & Cohn, A.G. (2014). RCC*-9 and CBM*. In M.Duckham, E.Pebesma, K.Stewart and A.U.Frank (Eds.), Conf. on Geographic Information Sci. (GIScience 2014) (pp. 349–365). Springer. doi:10.1007/978-3-319-11593-1_23.
10.
Clementini, E. & Di Felice, P. (1995). A comparison of methods for representing topological relationships. Information Sciences, 3(3), 149–178.
11.
Clementini, E., Di Felice, P. & van Oosterom, P. (1993). A small set of formal topological relationships suitable for end user interaction. In Symp. on Large Spatial Databases (SSD’93). LNCS (Vol. 692, pp. 277–295). Springer.
12.
Cohn, A.G., Bennett, B., Gooday, J.M. & Gotts, N.M. (1997). Qualitative spatial representation and reasoning with the Region Connection Calculus. GeoInformatica, 1, 275–316. doi:10.1023/A:1009712514511.
13.
Cohn, A.G. & Hazarika, S.M. (2001). Qualitative spatial representation and reasoning: An overview. Fund. Inform., 46(1–2), 1–29.
14.
Cohn, A.G. & Renz, J. (2008). Qualitative spatial representation and reasoning. In F.van Harmelen, V.Lifschitz and B.Porter (Eds.), Handbook of Knowledge Representation. Elsevier.
15.
Cohn, A.G. & Varzi, A.C. (2003). Mereotopological connection. J. Symbolic Logic, 32(4), 357–390.
16.
Egenhofer, M.J. (1991). Reasoning about binary topological relations. In Symp. on Large Spatial Databases (SSD’91). LNCS (Vol. 525, pp. 141–160). Springer.
17.
Egenhofer, M.J., Frank, A.U. & Jackson, J.P. (1989). A topological data model for spatial databases. In A.P.Buchmann, O.Günther, T.R.Smith and Y.-F.Wang (Eds.), Symp. on Large Spatial Databases (SSD’89). LNCS (Vol. 409, pp. 271–286). Springer. doi:10.1007/3-540-52208-5_32.
18.
Egenhofer, M.J. & Herring, J. (1991). Categorizing binary topological relations between regions, lines, and points in geographic databases. Technical report, Department of Surveying Engineering, Univ. of Maine.
19.
Galton, A. (1996). Taking dimension seriously in qualitative spatial reasoning. In Europ. Conf. on Artif. Intell. (ECAI-96) (pp. 501–505).
20.
Galton, A. (2004). Multidimensional mereotopology. In KR’04: Principles of Knowledge Representation and Reasoning (pp. 45–54).
21.
Gotts, N.M. (1996). Formalizing commonsense topology: The INCH calculus. In Int. Symp. on Artif. Intell. and Math. (pp. 72–75).
22.
Gruninger, M., Chui, C. & Katsumi, M. (2017). Upper ontologies in COLORE. In Proc. of the Joint Ontology Workshops (JOWO 2017). CEUR Workshop Proceedings (Vol. 2050).
23.
Grüninger, M., Hahmann, T., Hashemi, A., Ong, D. & Ozgovde, A. (2012). Modular first-order ontologies via repositories. Applied Ontology, 7(2), 169–209. doi:10.3233/AO-2012-0106.
24.
Hahmann, T. (2013). A reconciliation of logical representations of space: From multidimensional mereotopology to geometry. PhD thesis, Univ. of Toronto, Dept. of Comp. Science.
25.
Hahmann, T. (2018). On decomposition operations in a theory of multidimensional qualitative space. In S.Borgo, P.Hitzler and O.Kutz (Eds.), Int. Conf. on Formal Ontology in Information Systems (FOIS 2018). Frontiers in Artificial Intelligence and Applications (Vol. 306, pp. 173–186).
26.
Hahmann, T. & Brodaric, B. (2012). The void in hydro ontology. In Conf. on Formal Ontology in Inf. Systems (FOIS-12) (pp. 45–58). IOS Press. doi:10.3233/978-1-61499-084-0-45.
27.
Hahmann, T. & Brodaric, B. (2013). Kinds of full physical containment. In Conf. on Spatial Inf. Theory (COSIT-13) (pp. 397–417). Springer. doi:10.1007/978-3-319-01790-7_22.
28.
Hahmann, T. & Grüninger, M. (2011a). Multidimensional mereotopology with betweenness. In Int. Joint Conf. on Artif. Intell. (IJCAI-11) (pp. 906–911).
29.
Hahmann, T. & Grüninger, M. (2011b). A naïve theory of dimension for qualitative spatial relations. In Symp. on Logical Formalizations of Commonsense Reasoning (CommonSense 2011). AAAI Press.
30.
Hahmann, T. & Grüninger, M. (2012). Region-based theories of space: Mereotopology and beyond. In S.M.Hazarika (Ed.), Qualitative Spatio-Temporal Representation and Reasoning: Trends and Future Directions (pp. 1–62). IGI.
31.
Hahmann, T. & Stephen, S. (2018). Using a hydro-reference ontology to provide improved computer-interpretable semantics for the groundwater markup language (GWML2). Int. J. Geogr. Inf. Sci., 32(6), 1138–1171. doi:10.1080/13658816.2018.1443751.
32.
Hahmann, T. & Usery, E.L. (2015). What is in a contour map? A region-based logical formalization of contour semantics. In Conf. on Spatial Inf. Theory (COSIT-15). Springer.
33.
Hahmann, T., Winter, M. & Grüninger, M. (2009). Stonian p-ortholattices: A new approach to the mereotopology . Artif. Intell., 173, 1424–1440. doi:10.1016/j.artint.2009.07.001.
34.
International Electrotechnical Commission (ISO/IEC) (2004). ISO 19125:2004 Geographic information – Simple feature access.
35.
International Electrotechnical Commission (ISO/IEC) (2007). ISO 19136:2007 Geographic information – Geography Markup Language (GML).
36.
International Electrotechnical Commission (ISO/IEC) (2018). ISO 24707:2018 Information technology – Common Logic (CL): A framework for a family of logic-based languages. https://www.iso.org/standard/66249.html.
37.
Izadi, A., Hahmann, T., Guesgen, H.W. & Stock, K. (2019). Towards the modification of RCC*-9. In Proceedings of Adventures in GeoComputation (Geocomputation 2019), Sept. 18–21 2019, Queenstown, New Zealand.
38.
Klippel, A., Li, R., Yang, J., Hardisty, F. & Xu, S. (2013). The Egenhofer–Cohn hypothesis or, topological relativity? In M.Raubal, D.M.Mark and A.U.Frank (Eds.), Cognitive and Linguistic Aspects of Geographic Space. Lecture Notes in Geoinformation and Cartography (pp. 195–215). Springer. doi:10.1007/978-3-642-34359-9_11.
39.
Kurata, Y. (2008). The 9-intersection: A universal framework for modeling topological relations. In T.J.Cova, H.J.Miller, K.Beard, A.U.Frank and M.F.Goodchild (Eds.), Intern. Conf. on Geographic Information Science (GIScience 08) (pp. 181–198). Springer. doi:10.1007/978-3-540-87473-7_12.
40.
Kurata, Y. (2010). 9+-intersection calculi for spatial reasoning on the topological relations between heterogeneous objects. In Intern. Conf. on Advances in Geographic Information Systems (SIGSPATIAL 2010) (pp. 390–393). ACM.
41.
Mark, D.M. & Egenhofer, M.J. (1994). Modeling spatial relations between lines and regions: Combining formal mathematical models and human subjects testing. Cartogr. Geogr. Inf. Sci., 21(3), 195–212.
42.
Masolo, C., Borgo, S., Gangemi, A., Guarino, N. & Oltramari, A. (2003). Wonderweb deliverable D18 – ontology library (final report). Technical report, National Research Council – Institute of Cognitive Sci. and Technology, Trento.
43.
McCune, W. (2010). Prover9. http://www.cs.unm.edu/~mccune/prover9/.
44.
McKenney, M., Pauly, A., Praing, R. & Schneider, M. (2005). Dimension-refined topological predicates. In Conf. on Advances in Geographic Information Systems (GIS-05) (pp. 240–249). ACM.
45.
Mossakowski, T., Codescu, M., Kutz, O., Lange, C. & Gruninger, M. (2013). Proof support for common logic. In Workshop on Automated Reasoning for Quantified Non-classical Logic (ARQNL 2013).
46.
Muñoz, L.S. & Grüninger, M. (2016). Verifying and mapping the mereotopology of upper-level ontologies. In Proceedings of the International Joint Conference on Knowledge Discovery, Knowledge Engineering and Knowledge Management (KEOD 2016) (pp. 31–42). doi:10.5220/0006052100310042.
47.
Niles, I. & Pease, A. (2001). Towards a standard upper ontology. In Conf. on Formal Ontology in Inf. Systems (FOIS-01) (pp. 2–9). IOS Press. doi:10.1145/505168.505170.
48.
Open Geospatial Consortium (OGC) (2012). OGC GeoSPARQL – a geographic query language for RDF data. OGC 11-052r4. http://www.opengeospatial.org/standards/geosparql.
49.
Randell, D.A., Cui, Z. & Cohn, A.G. (1992). A spatial logic based on regions and connection. In KR’92: Principles of Knowledge Representation and Reasoning (pp. 165–176).
50.
Riazanov, A. & Voronkov, A. (2002). The design and implementation of Vampire. AI Commun., 15(2–3), 91–110.
51.
Rodriguez, A. (2016). Topological relations. In The International Encyclopedia of Geography: People, the Earth, Environment, and Technology. John Wiley & Sons. doi:10.1002/9781118786352.wbieg0514.
52.
Simons, P. (1987). Parts – A Study in Ontology. Clarendon Press.
53.
Smith, B. (1996). Mereotopology: A theory of parts and boundaries. Data Knowl. Eng., 20(3), 287–303. doi:10.1016/S0169-023X(96)00015-8.
54.
Smith, B., et al. (2012). Basic Formal Ontology 2.0 Draft Specification and User’s Guide.
55.
Smith, B. & Varzi, A.C. (1997). Fiat and bona fide boundaries: Towards an ontology of spatially extended objects. In Conf. on Spatial Inf. Theory (COSIT-97). LNCS (Vol. 1329, pp. 103–119). Springer.
56.
Stephen, S. & Hahmann, T. (2017). An ontological framework for characterizing hydrologic flow processes. In E.Clementini, M.Donnelly, M.Yuan, C.Kray, P.Fogliaroni and A.Ballatore (Eds.), Intern. Conf. on Spatial Inf. Theory (COSIT-17). Leibniz International Proceedings in Informatics (LIPIcs) (Vol. 86, pp. 7:1–7:14). Schloss Dagstuhl–Leibniz-Zentrum fuer Informatik. doi:10.4230/LIPIcs.COSIT.2017.7.
57.
Stephen, S. & Hahmann, T. (2019). Formal qualitative spatial augmentation of the simple feature access model. In E.Clementini, M.Donnelly, M.Yuan, C.Kray, P.Fogliaroni and A.Ballatore (Eds.), Intern. Conf. on Spatial Inf. Theory (COSIT-19). Leibniz International Proceedings in Informatics (LIPIcs) (Vol. 142, pp. 15:1–15:18). Schloss Dagstuhl–Leibniz-Zentrum fuer Informatik. doi:10.4230/LIPIcs.COSIT.2019.15.
58.
Varzi, A.C. (1996). Parts, wholes, and part-whole relations: The prospects of mereotopology. Data Knowl. Eng., 20(3), 259–286. doi:10.1016/S0169-023X(96)00017-1.
59.
Varzi, A.C. (2007). Spatial reasoning and ontology: Parts, wholes, and locations. In M.Aiello, I.E.Pratt-Hartmann and J.v.Benthem (Eds.), Handbook of Spatial Logics (pp. 945–1038). Springer. doi:10.1007/978-1-4020-5587-4_15.
60.
Whitehead, A.N. (1929). Process and Reality. MacMillan.