
Abstract
Nowadays, as an indispensable part of urban infrastructure, urban rail transit (URT) vehicles have also developed rapidly. A large amount of manpower, material resources, and financial resources need to be invested in the construction process of URT. For URT vehicles, research on more accurate fault prediction methods can save a lot of maintenance costs and improve the reliability of URT construction. As an important electrical equipment for urban rail transit vehicles to obtain electric energy from the catenary, the operation of rail transit vehicles puts forward higher performance requirements for the pantograph. For solving the problems of low accuracy of fault prediction, over reliance on practical experience and high cost of fault prediction in the application of traditional URT vehicle pantograph fault prediction model. Combining sensor network and artificial intelligence algorithm, this paper analyzed the traditional rail transit vehicle pantograph fault prediction model, and verified it through comparative experiments. Through the comparative analysis of the experimental results, this paper can draw a conclusion that compared with the traditional rail transit vehicle pantograph fault prediction model, the rail transit vehicle pantograph fault prediction model has higher fault prediction accuracy, less model response time, lower risk of pantograph failure, higher model application satisfaction, and the accuracy of fault prediction increased by about 6.6%. The rail transit vehicle pantograph fault prediction model can effectively improve the accuracy of vehicle pantograph fault prediction, which can greatly promote the safety of URT and promote the intelligent process of URT.
Introduction
The planning and construction of URT has received attention with the progress of the city and the development of society. Currently, the functions of URT vehicles are relatively complete, and there are many electrical equipment, resulting in a higher probability of corresponding failures. The pantograph failure causes the power supply of rail vehicles to be blocked, thus causing a large area of rail traffic paralysis, which has caused a certain obstacle to the development of URT construction. The pantograph has attracted more and more attention from all parties. It is an effective direction to improve the reliability of URT system to optimize the prediction method of rail transit vehicle pantograph failure.
Canny edge detection algorithm is introduced into the pantograph fault prediction model of urban rail transit vehicles, thus improving the accuracy and reliability of fault prediction. In the field of urban rail transit, pantograph is an important electrical equipment, and its working state is directly related to the operation and safety of vehicles. Therefore, it is very important to accurately predict the failure of pantograph for improving the reliability and safety of urban rail transit system. Canny algorithm is applied to the pantograph fault prediction model of urban rail transit vehicles. By extracting the edge features of the pantograph state image, the working state of the pantograph can be identified more accurately, and the pantograph fault can be predicted. This prediction model not only improves the accuracy of fault prediction, but also reduces the response time and cost of fault prediction, and improves the application satisfaction of the model.
To solve the problems in the traditional URT vehicle pantograph fault prediction model, such as the poor effect of vehicle pantograph fault prediction, the dependence of fault prediction task on relevant work experience and professional knowledge, and the weak ability to deal with sudden fault problems, this paper conducted an application experiment. The advantages and disadvantages of the traditional pantograph fault prediction model were analyzed. Based on the traditional pantograph fault prediction model, machine learning technology was tentatively applied. The image of the pantograph state in the working process was collected through the highly sensitive wireless sensor, and the edge features of the image were extracted and classified combined with the intelligent algorithm. In this process, the traditional traffic vehicle pantograph fault prediction model was optimized. The optimized URT vehicle pantograph fault prediction model in this paper can predict the fault of pantograph in working state with higher efficiency, and has stronger ability to deal with sudden fault problems.
In this paper, an optimized pantograph fault prediction model for urban rail transit vehicles is proposed, and its effectiveness is verified by empirical research. In this paper, Canny edge detection algorithm is used to extract the features of the pantograph state image, thus effectively identifying the pantograph state information. In the aspect of forecasting accuracy, the optimized model improves the forecasting accuracy by about 6.6% compared with the traditional model, effectively improves the forecasting accuracy of pantograph faults, and reduces the maintenance cost and security risks caused by faults. In the response time of the model, the optimized model shows faster response speed, improves the efficiency of information processing, and enables the fault prediction task to be completed in time. In addition, the optimized model can also reduce the frequency of serious failures and improve the stability and reliability of urban rail transit system. Finally, through the satisfaction survey of model application, it is proved that the optimized model has been highly evaluated in the aspects of prediction effect, response time, analysis speed and risk response, which further verifies its value and feasibility in practical application.
The structure of this paper is as follows: The first part introduces the importance and development background of pantographs for urban rail transit vehicles. The second part introduces the current research status in the field of pantograph fault prediction through a large number of documents. The third part is the method part of the article. The fourth part is the experimental results. The fifth part summarizes the research contents and main findings of this paper, and emphasizes the value and significance of the optimization model.
Related work
The development of urban rail transit industry is influenced by many factors, and some scholars have analyzed the planning and construction of rail transit system. Bao analyzed the development process of urban rail transit from a macro perspective, and systematically analyzed the urban rail transit mode, industrial technology and vehicle failures through extensive investigation and research [1]. Signal system is a vital part of urban rail transit system, which is responsible for controlling the running, stopping and following of trains. Signal system failure may lead to serious consequences such as abnormal train running, chaotic parking and even collision [2, 3]. Track equipment, including tracks, switches and track circuits, is an important foundation to ensure the safe operation of trains. The failure of track equipment may lead to track damage, turnout failure or track circuit failure, thus affecting the normal running of trains [4, 5]. The above experiments have studied the factors that restrict the development of urban rail transit industry. Through comparison, it can be concluded that finding and solving the faults of urban rail transit vehicles in time can promote the development of rail transit system to a greater extent.
Pantograph is the key link of power transmission during the operation of urban rail transit vehicles, and its research and analysis is an important basis for optimizing the architecture of urban rail transit system. The research and analysis of pantograph is helpful to improve the operation efficiency of urban rail transit system. By deeply understanding the working principle and performance characteristics of pantographs, we can optimize their design and layout, improve the efficiency of electric energy transmission and reduce energy consumption, thus reducing energy consumption and operating costs [6, 7]. The research and analysis of pantograph is helpful to improve the reliability and safety of urban rail transit system. Finding and solving pantograph faults in time can avoid train faults and traffic accidents caused by power supply interruption and ensure passengers’ safe travel [8, 9]. The above experiments summarize and analyze the performance of pantograph in the working process, and put forward the optimization direction.
In addition, some researchers also explored the optimal application of pantograph in urban rail transit design. Pantograph is the key equipment for urban rail transit vehicles to obtain electric energy, and its optimal design can effectively improve energy utilization efficiency. By improving the structure and material of pantograph, reducing energy loss and resistance and optimizing power transmission path, energy consumption can be reduced and the utilization rate of electric energy can be improved [10, 11]. The optimization of pantograph design can improve the stability of power supply for trains and ensure that the trains can stably obtain enough electric energy during operation [12]. The above experiment explored the best application of pantograph, but no more perfect experiment was carried out.
Method
With the continuous development of computer technology, the deepening of research on artificial intelligence theory, and the application of advanced training methods such as machine learning to the performance maintenance of rail transit vehicles, high-speed trains have become the main mode of transportation in URT [13]. As one of the key components of URT, the pantograph is one of the decisive factors for the stable operation of motor cars. In order to better promote the safety of train operation and reduce operating costs, while providing passengers with a faster and more stable journey experience, it is urgent to optimize the model of pantograph fault prediction. The early imported vehicles of URT system are equipped with imported pantograph. However, the imported pantograph have high cost and relatively lagged response speed, which makes the pantograph prone to failure in the process of vehicle operation. Once the pantograph fails, it would greatly affect the normal operation of the vehicle, and even delay the travel plan of passengers. The more common failures of pantographs are damage to support parts during long-term frictional activities, uneven wear of slide plates, and offline pantographs. Real time monitoring of the working state of the pantograph can effectively predict the time and extent of pantograph failures. Timely remedy and maintenance of these failures can maximize the passenger travel experience and vehicle operation stability [14].
This paper summarized and analyzed the common faults of the pantograph. When the pantograph is in the rising state, the sliding plate of the pantograph is in close contact with the catenary, and the traction motor of the vehicle receives power through the conductor cable to drive the vehicle. When the vehicle is running, the pantograph and its sliding plate are in the state of friction and arc burning for a long time, which may lead to various pantograph failures. Through the comprehensive monitoring and fault prediction of the pantograph work of rail transit vehicles, the working state of the pantograph in the process of vehicle operation can be determined, which can provide reference and basis for the maintenance personnel. Timely fault prediction of pantograph is conducive to improving the stability of motor train operation, reducing the difficulty of maintenance personnel and improving efficiency. In the process of high-speed operation of vehicles, some pantograph of rail vehicles have broken tie rods. The pantograph tie rods are subject to large tension. Under the combined action of tension and welding residual stress, the tie rods are prone to fatigue and stress corrosion, leading to fracture. The part of the pantograph sliding plate that directly contacts with the catenary would inevitably cause wear. Due to the excessive contact force between the pantograph and the catenary, abnormal phenomena such as pantograph falling off and rapid wear would be caused.
In the traditional URT vehicle pantograph prediction model, most people use camera equipment to take pictures of the pantograph status first, and then the captured pantograph image is judged by professionals with professional knowledge on the pantograph status. Due to the influence of image clarity, the judgment is too subjective and the accuracy is not high. In addition, it would cost a lot of manpower and material resources to perform the pantograph fault prediction task, and it is impossible to monitor the status of the pantograph in real time. In this paper, based on edge feature extraction and machine learning technology, combined with wireless sensor network, the image of the working state of the pantograph was collected and transmitted to the control center. A large number of images were trained as the original data injection model, and image features were extracted and clustered, so as to predict the occurrence of pantograph fault more efficiently. Figure 1 shows the structure diagram of the optimized pantograph fault prediction model for rail transit vehicles.
Structure of optimized pantograph fault prediction model for rail transit vehicles.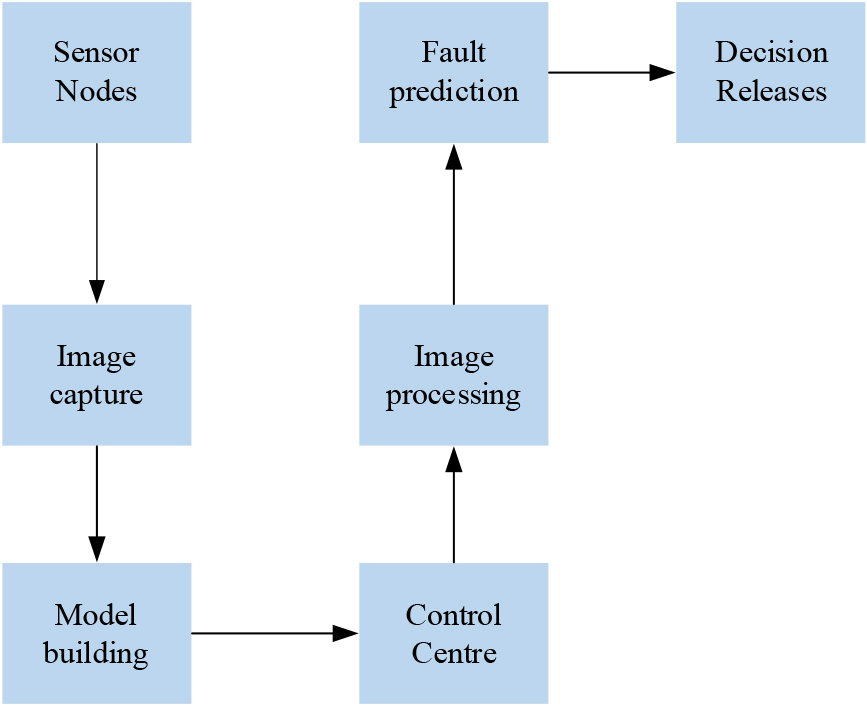
With the rapid development of computer technology, image edge feature extraction technology has been widely applied in image processing. Pantograph status image is the main information source to predict pantograph failure. The edge of pantograph state image not only contains the most important information of pantograph state, but also is the most basic feature of pantograph state, so edge detection and feature extraction of pantograph state image play an important role in pantograph fault prediction model [15]. In the traditional pantograph fault prediction model, the prediction and judgment of pantograph status would be interfered by image quality factors. Since the vehicle is generally running at high speed during the process of photographing pantograph status, it would be interfered by various factors, resulting in more complex image information. The edge of the pantograph in the image is generally discontinuous. The edge of the pantograph image has the characteristics of direction and amplitude. The gray level changes steadily along the edge trend, and the gray level of pixels perpendicular to the edge trend changes sharply. It is the mainstream direction of current research to effectively extract the image edge features to achieve the purpose of edge information mining.
Edge detection can find the edge of an object by identifying the sudden change of pixel gray value in an image. Canny edge detection algorithm is a classic method. Firstly, the image is Gaussian smoothed, then the gradient intensity and direction are calculated, then the edge is refined by non-maximum suppression, and finally the edge is detected and tracked by double threshold processing and edge connection. This process can extract the edge features in the image.
Canny edge feature detection
This article tentatively introduced the Canny edge feature detection algorithm. Canny edge feature detection algorithm is an optimal approximation operator that multiplies the signal noise ratio of the image and the progress of edge detection and location. It can process the pantograph state image collected by the sensor.
The image of the pantograph is collected through the sensor, and the collected image is calculated by Canny algorithm as the original data. The original image
Among them,
Among them,
The two templates obtained from the conversion are convolved with image
Figure 2 shows the edge feature extraction image of pantograph obtained using Canny edge detection algorithm.
Pantograph edge feature extraction image.
Edge feature extraction technology is often used for target detection and recognition. By detecting the edge in the image, we can locate and identify the position and shape of the object more easily. This is very important in many applications, such as pedestrian detection in autonomous driving and organ segmentation in medical images.
Edge feature extraction is also widely used in image enhancement and denoising. By highlighting the edge information in the image, the image can be clearer and easier to understand, and at the same time, the noise interference in the image can be reduced and the image quality can be improved.
Edge feature extraction technology is also commonly used in image matching and registration. By comparing the edge features of images, the alignment and matching between images can be realized, which can be used in target tracking, image mosaic and other applications. Canny edge detection algorithm is a common method in edge feature extraction technology. Gaussian filter is used to smooth the image to reduce noise. Calculate the gradient amplitude and direction of the image, so as to identify the place where the gradient changes most violently. Only local maximum points are reserved in the gradient direction to refine the edge image. The pixels in the gradient image are divided into strong edges and weak edges, and the edge pixels are further classified. Connect weak edge pixels with strong edge pixels to form a continuous edge.
Application experiment of URT vehicle pantograph fault prediction model
The phenomenon of ground traffic congestion occurs from time to time. Therefore, vigorously developing URT is the best solution to solve the problem of ground traffic congestion. The overhead catenary power supply is a common power supply mode for URT vehicles. As a key component of the overhead catenary power supply mode, the stability of the pantograph’s working state would directly determine the running state of the vehicle. If the pantograph fails during the vehicle operation, the vehicle would lose power. There are many drawbacks in the traditional URT vehicle pantograph fault prediction model. When the pantograph and catenary contact power supply, the monitoring effect of the traditional model on the working state of the pantograph is not strong.
The contact between the pantograph and the catenary during work would be in the state of friction, shock, vibration, etc. for a long time, which would inevitably lead to various fault problems of the pantograph. In order to better predict the occurrence of pantograph fault problems, improve the efficiency of solving pantograph fault problems, save costs and make pantograph better adapt to daily vehicle power supply work, this paper analyzed the traditional URT vehicle pantograph fault prediction model. On the basis of the traditional URT vehicle pantograph fault prediction model, various problems were optimized.
This paper tentatively used advanced machine learning technology to optimize the traditional URT vehicle pantograph fault prediction model, and used a highly integrated wireless sensor network to collect images of the pantograph in working state. The data was transmitted to the control center through wireless signal communication, and a large amount of image data was injected into the optimized traffic vehicle pantograph fault prediction model as the original sample. Canny edge detection algorithm was used to complete the edge feature extraction and classification, and combined with the pantograph fault evaluation rules to form a training model, which was used to predict the fault of the pantograph in the working state. The optimized rail transit vehicle pantograph fault prediction model can avoid manual subjective evaluation and save costs, and improve the effect of URT vehicle pantograph fault prediction. However, certain experiments are still needed to verify the application effect of the optimized rail transit vehicle fault prediction model.
Canny edge detection algorithm is introduced into the pantograph fault prediction model of urban rail transit vehicles to extract the edge features of pantograph state images. The application of this algorithm is helpful to accurately identify the pantograph edge in the image, thus providing important information for the fault prediction model. Canny edge detection algorithm performs Gaussian smoothing on the pantograph state image to reduce the noise in the image. This step is very important to ensure the accuracy of edge detection because there may be various interferences during the driving of the vehicle. Then, Canny algorithm calculates the gradient intensity and direction of the image to identify the edge. After non-maximum suppression, only the pixels with local maximum are retained, thus thinning the edge image. The edge pixels are classified by double threshold processing, and the strong edge pixels are distinguished from the weak edge pixels. Edge connection algorithm is used to connect weak edge pixels with strong edge pixels to form a continuous edge. This ensures that the final edge image is coherent and can be better used for the training and application of fault prediction models.
The flow of Canny edge detection algorithm is shown in Fig. 3.
The flow of Canny edge detection algorithm.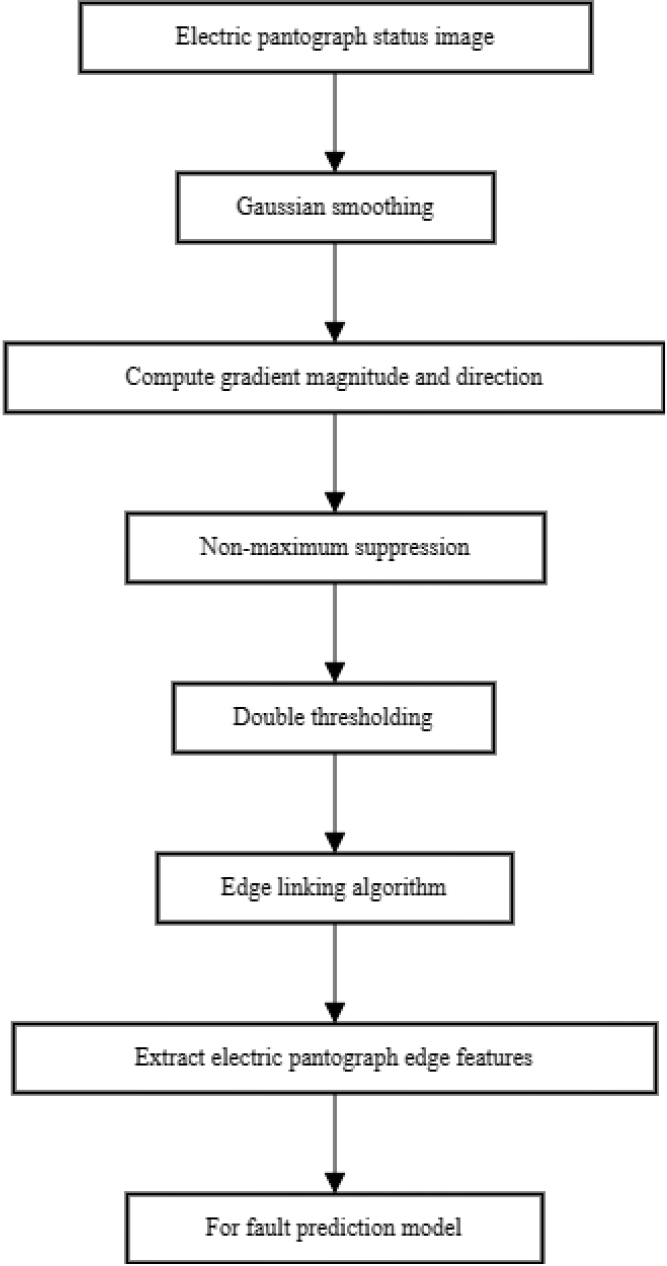
This article conducted a comparative experiment on the application effect of optimizing the fault prediction model for rail transit vehicles at a certain electromechanical integration service company in a certain area. The Control variates is used in the contrast experiment to control the variables of irrelevant factors outside the experiment content, so as to prevent irrelevant factors from affecting the experiment effect. During the experiment, the process of applying the traditional pantograph fault prediction model of rail transit vehicles was set as the control group experiment, and the process of applying the optimized pantograph fault prediction model of rail transit vehicles was set as the experimental group experiment. The effectiveness and feasibility of the optimized rail transit vehicle fault prediction model were verified from four aspects, namely, the accuracy of pantograph fault prediction, model response time, fault degree analysis and model application satisfaction.
The traditional setting is to adopt the traditional pantograph fault prediction model of rail transit vehicles. The control group used the traditional model to carry out experiments, while the experimental group used the optimized model. The performance differences of different models in prediction accuracy, response time, fault degree and model application satisfaction are compared and analyzed to evaluate the advantages and disadvantages of the optimized model compared with the traditional model.
To verify the feasibility of the optimized pantograph fault prediction model for rail transit vehicles, comparative experiments were carried out on the vehicle pantograph using the traditional rail transit vehicle fault prediction model and the optimized rail transit vehicle fault prediction model. The accuracy of pantograph fault prediction in the control group and the experimental group was recorded respectively, and the difference of the accuracy of pantograph fault prediction between the two models in the application process was compared. Figure 4 shows the prediction accuracy of fault problems of pantograph during the application of different models.
Comparison of pantograph fault prediction accuracy between the control and experimental groups.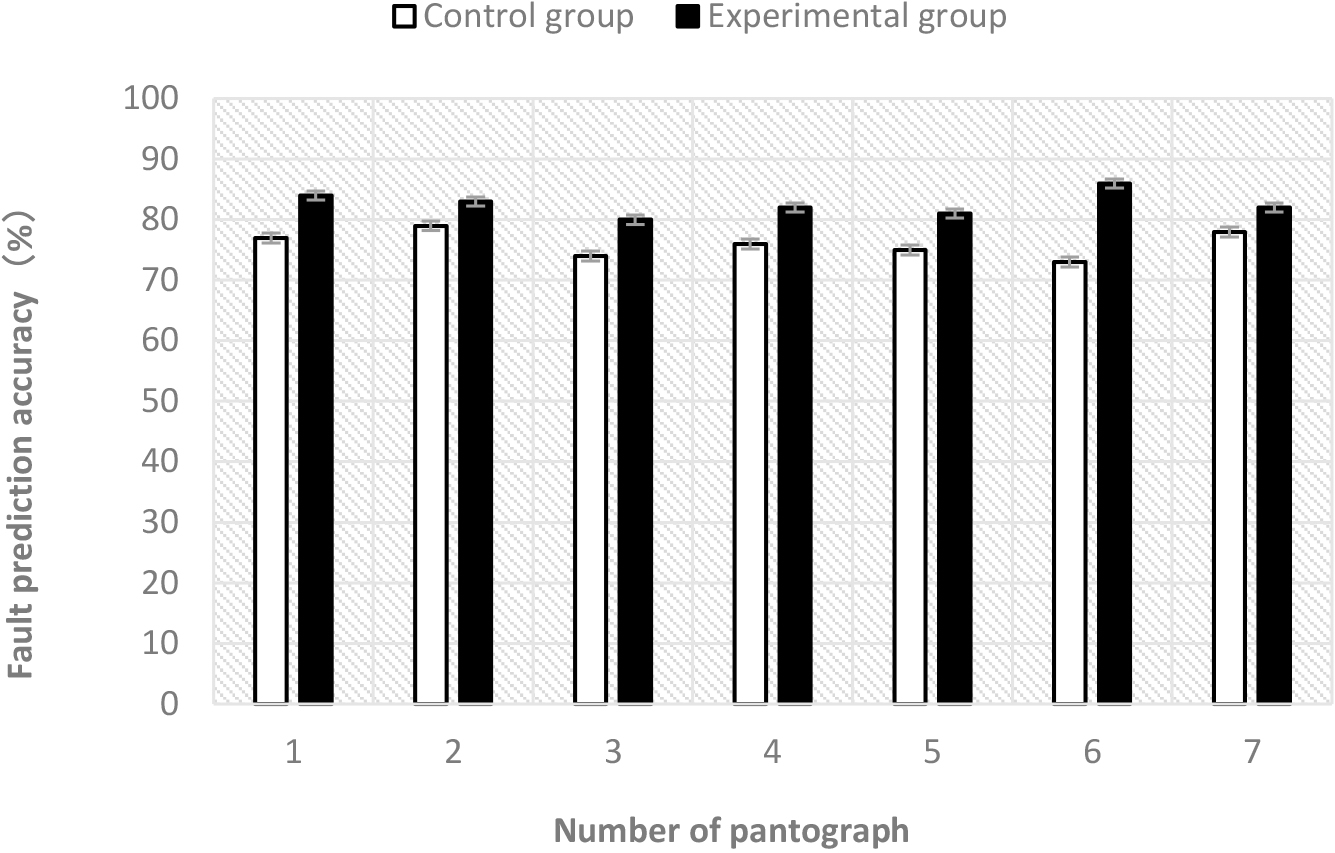
In Fig. 4, the control group experiment records conducted during the application of the traditional rail transit vehicle pantograph fault prediction model showed that the prediction accuracy of the fault problems of the seven vehicle pantograph from the first experiment was 77%, 79%, 74%, 76%, 75%, 73%, 78% respectively; the highest accuracy rate of vehicle pantograph fault prediction was in the second experiment, and the accuracy rate of fault prediction was 79%; the accuracy rate of vehicle pantograph fault prediction was the lowest in the sixth experiment, and the accuracy rate of fault prediction was 73%; the average fault prediction accuracy of the experiment was 76%. The experimental records of the experimental group carried out in the process of optimizing the application of the pantograph fault prediction model for rail transit vehicles showed that the prediction accuracy of the fault problems of the seven vehicle pantograph since the first experiment was 84%, 83%, 80%, 82%, 81%, 86% and 82% respectively; the highest accuracy rate of vehicle pantograph fault prediction was in the sixth experiment, and the accuracy rate of fault prediction was 86%; the lowest accuracy rate of vehicle pantograph fault prediction was in the third experiment, and the accuracy rate of fault prediction was 80%; the average fault prediction accuracy of the experiment was about 82.6%.
According to Fig. 4, the accuracy rate of pantograph fault prediction model optimized for rail transit vehicles based on feature edge extraction and machine learning was higher, and the accuracy rate of fault prediction in the application process of traditional rail transit vehicle pantograph fault prediction model was increased by 6.6% compared with that of traditional rail transit vehicle pantograph fault prediction model. The optimization model introduced advanced technology significantly improved the ability of vehicle pantograph fault prediction.
By adjusting the parameters and optimization algorithm of the machine learning model, the performance and efficiency of the pantograph fault prediction model for rail transit vehicles are improved. The optimized model has higher prediction accuracy and faster response speed, which enables pantograph faults to be predicted and identified more accurately, thus improving the safety and reliability of urban rail transit system.
The experiment using the traditional pantograph fault prediction model of rail transit vehicles was set as the control group, and the experiment using the optimized pantograph fault prediction model of rail transit vehicles was set as the experimental group. By comparing the response time of the two models in the application process, it was determined which model has a faster and more efficient information processing ability. The completion time of the prediction task of the six vehicle pantograph was recorded in the control group and the experimental group, respectively. The time spent for a model response from the beginning to the end of the prediction task was recorded. The difference in the completion time of the prediction task between the two models in the application process was compared, thus reflecting the difference in the response time of the two models. Figure 5 shows the comparison of model response time of vehicle pantograph in the application process of different models.
Comparison of model response times between control and experimental groups.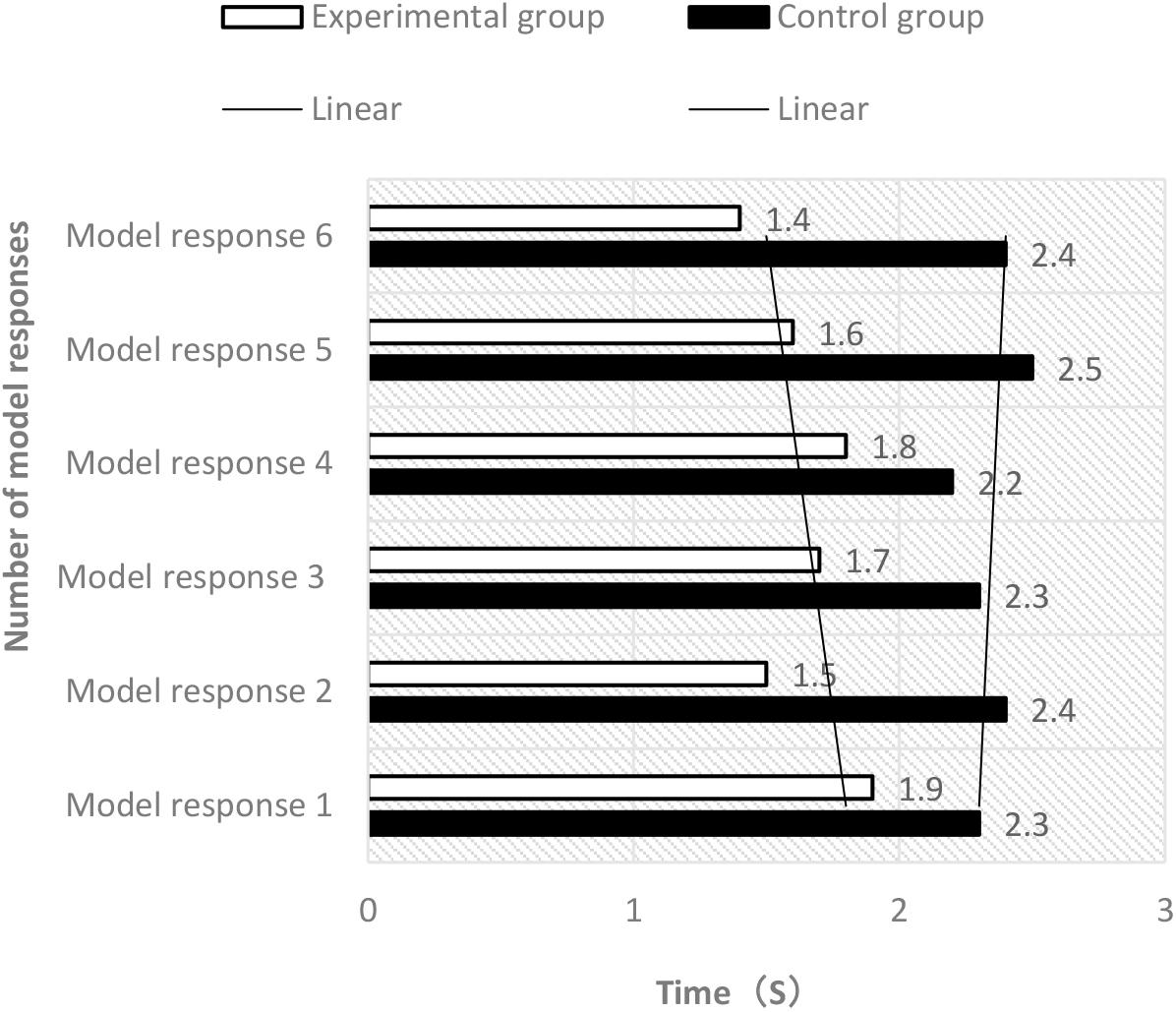
In Fig. 5, the control group experiment using the traditional rail transit vehicle pantograph fault prediction model recorded the completion time of six vehicle pantograph fault prediction tasks, and the time spent from the first experiment was 2.3S, 2.4S, 2.3S, 2.2S, 2.5S, 2.4S respectively; the fifth experiment took the longest time, with a duration of 2.5 seconds; the shortest time spent was the fourth experiment, which took 2.2 s; the average time to complete the pantograph fault prediction task was about 2.4 s. The time spent by the experiment group applying the optimized rail transit vehicle pantograph fault prediction model from the first experiment was 1.9S, 1.5S, 1.7S, 1.8S, 1.6S and 1.4S respectively; the first experiment took the longest time, with a duration of 1.9 s; the shortest time spent was the 6th experiment, which took 1.4 s; the average time to complete the pantograph fault prediction task was about 1.7 s.
It can be seen from the comparative analysis in Fig. 5 that compared with the experimental group that applied the optimized rail transit vehicle pantograph fault prediction model, the control group that applied the traditional rail transit vehicle pantograph fault prediction model took longer to complete the pantograph fault prediction task, and the model response time of the optimized model was shorter than that of the traditional mode. The introduction of image edge feature extraction technology can reduce the model response time of vehicle pantograph fault prediction model, so that the pantograph fault prediction model has more efficient information processing capability.
Edge feature extraction technology reduces the complexity of image processing by identifying the edge information in the image. Compared with processing the whole image, processing only the edge information can reduce the amount of calculation and processing time. Therefore, the edge feature extraction technology can improve the efficiency of the vehicle pantograph fault prediction model, shorten the response time of the model, and make the prediction task complete faster.
The 30 times of pantograph fault degree in the experiment of the experimental group and the control group were recorded respectively. By comparing the pantograph fault degree in the application process of the two pantograph fault prediction models, it can reflect the impact of the cited advanced technology on the performance of the pantograph fault prediction model. The fault degree of the pantograph was set, and the fault degree was divided into five levels from minor to severe, namely, fault degree D, fault degree C, fault degree B, fault degree A, and fault degree S. Figure 6 shows the comparative analysis of the fault degree of the pantograph during the application of the two models.
Comparative analysis of the degree of experimental failure in the control and experimental groups.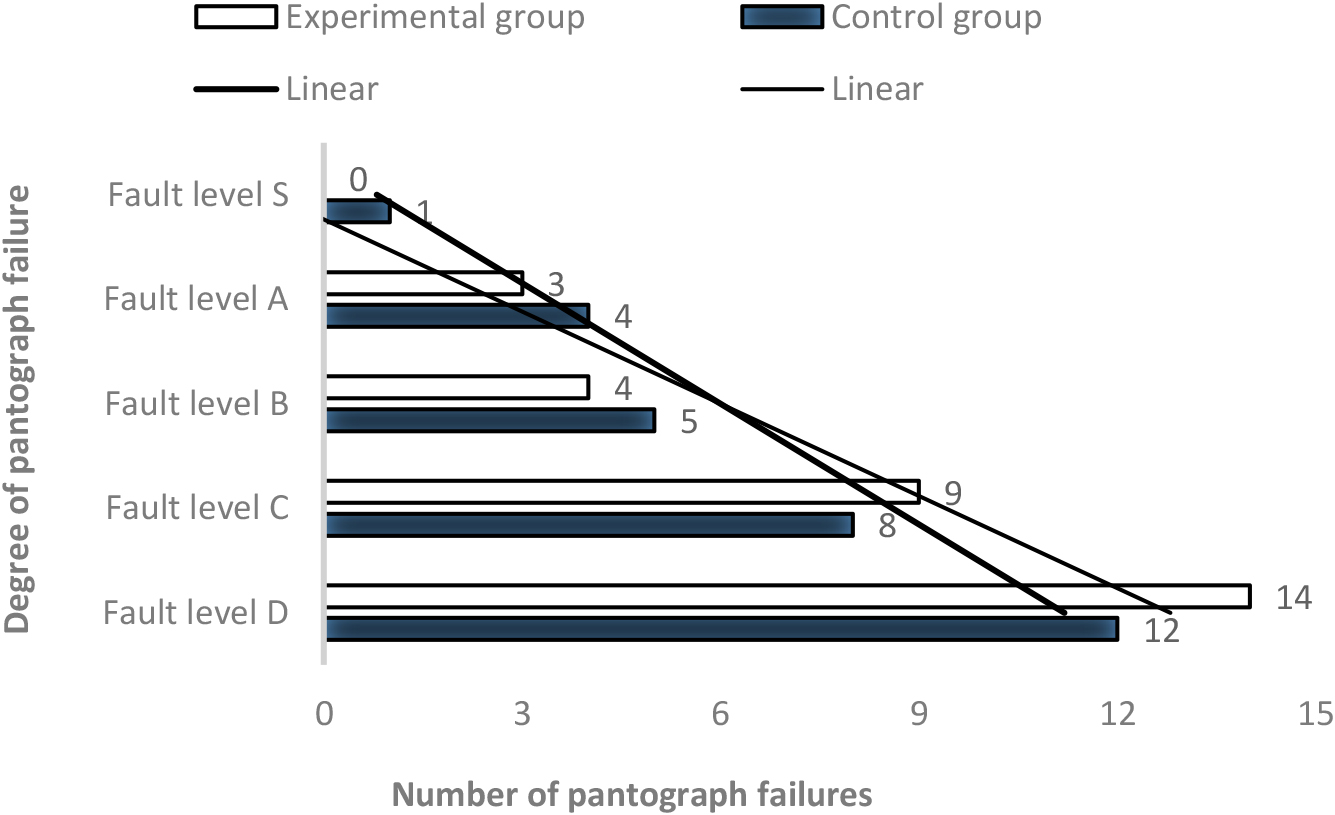
In Fig. 6, in the traditional pantograph fault prediction model, the pantograph fault degree control group experiment recorded 30 times of vehicle pantograph fault degree, including 12 times for D, 8 times for C, 5 times for B, 4 times for A, and 1 time for S. In the optimized pantograph fault prediction model, the pantograph fault degree experiment group recorded 30 times of vehicle pantograph fault degree, including 14 times for D, 9 times for C, 4 times for B, 3 times for A, and 0 time for S.
The judgment and analysis of the fault degree of pantograph is very important to the operation quality of rail vehicle transportation. The higher the number of serious faults, the more unstable the operation of rail transportation. According to Fig. 6, the number of serious failures in the experimental group experiment using the optimized rail transit vehicle pantograph failure prediction model was less than that in the control group experiment using the traditional rail transit vehicle pantograph failure prediction model. The optimization model introducing image edge feature extraction and machine learning technology improved the stability of URT vehicle operation.
To verify the effect of the optimized URT vehicle pantograph fault prediction model based on feature edge extraction and machine learning technology in practical application, this paper conducted a questionnaire survey on relevant staff and managers, and collected evaluation data on the application satisfaction of the model. The control group experiment was the questionnaire survey using the traditional pantograph fault prediction model for rail transit vehicles, and the experimental group was the questionnaire survey using the optimized pantograph fault prediction model for rail transit vehicles. Comparative experiments were conducted on four satisfaction evaluation indicators: prediction effectiveness, response time, analysis speed, and risk response. Among them, the upper limit for evaluating various satisfaction indicators was 10. Figure 7 shows the comparison of the satisfaction evaluation of the two models in the application process.
Comparison of the satisfaction assessment of the model application effect between the control group and the experimental group. A. Satisfaction evaluation of model application in the control group. B. Satisfaction evaluation of model application in the experimental group.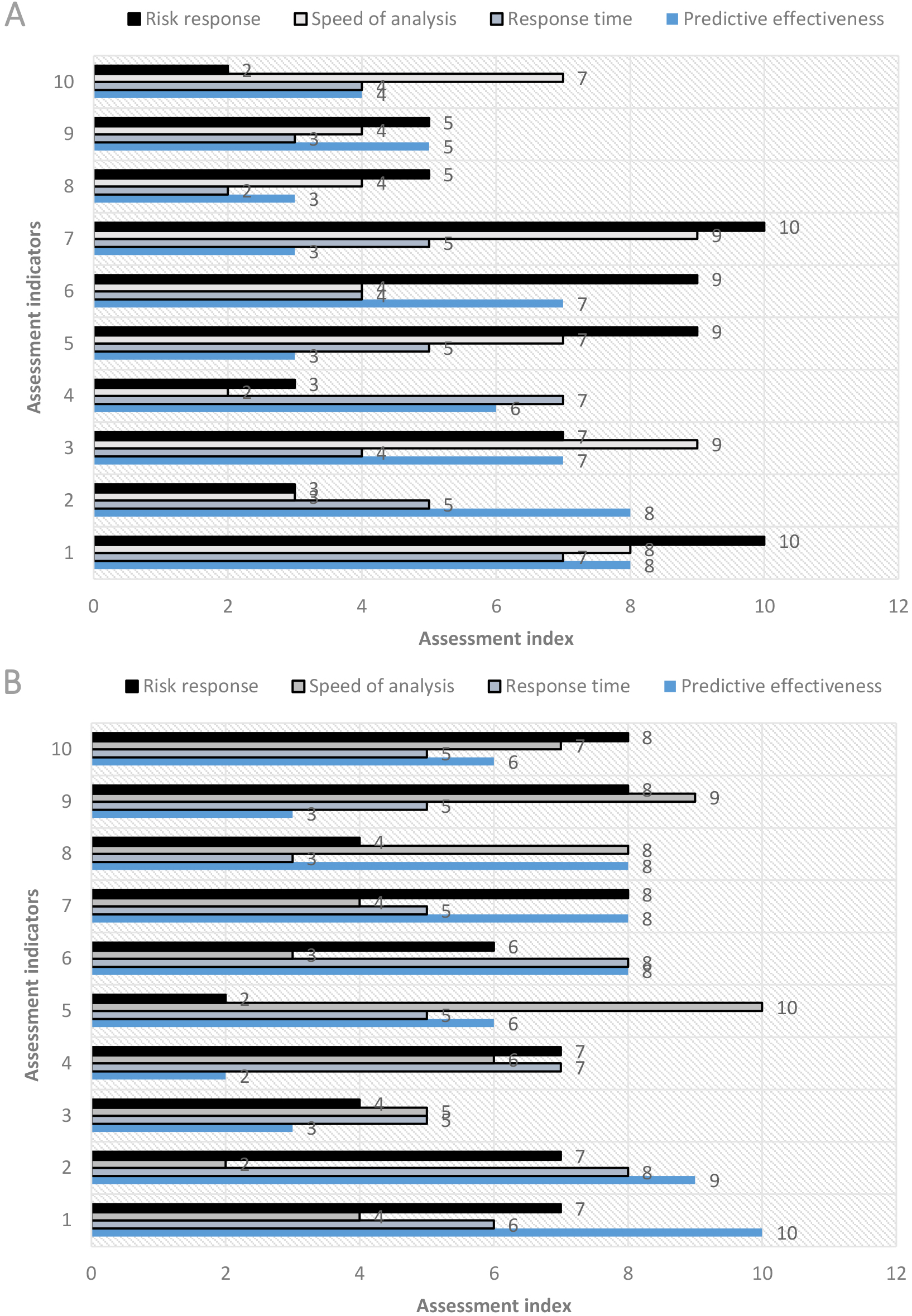
In Fig. 7A and B, the application effect of the traditional rail transit vehicle pantograph fault prediction model in the control group is represented by four evaluation indicators, and the average evaluation indices of the four indicators of prediction effect, response time, analysis speed and risk response were 5.4, 4.6, 5.7 and 6.3 respectively. The average evaluation indices for the four indicators of prediction effectiveness, response time, analysis speed, and risk response in the experimental group were 6.3, 5.7, 5.8, and 6.1, respectively.
From the comparative analysis of Fig. 7, it can be seen from a micro perspective that advanced technology is not omnipotent. In terms of the evaluation indicator of model risk response, the evaluation of traditional models is higher than that of optimized models. From a macro perspective, it can be seen that the evaluation index of the four evaluation indicators is comprehensive, and the optimized model has a higher evaluation of application effectiveness compared to traditional models.
Due to the progress and development of science and technology, the traffic construction of urban society has posed a higher challenge. URT vehicle intelligence operates in a certain area. As an important infrastructure to meet the requirements of vehicle interconnection and power supply in this area, pantograph fault intelligent prediction is an important research direction in the field of rail transit development. There are problems in the traditional pantograph fault prediction model for urban rail vehicles, such as low accuracy of pantograph fault prediction, over-reliance on professional knowledge and subjective judgment of relevant personnel in performing fault prediction tasks, and high cost of fault prediction for working pantographs. Therefore, by introducing edge feature extraction and machine learning technology, combined with Canny edge detection algorithm and sensor network, this paper optimized on the basis of traditional rail transit vehicle pantograph fault prediction model. In the running process of the model, the sensor collected the working image of the pantograph, and processed the edge features of the collected image to achieve better classification effect. The optimization model improved the problems in the traditional pantograph fault prediction model, and further improved the intelligence of the URT vehicle pantograph fault prediction model, which improved the pantograph fault prediction effect and saved a lot of costs.