In recent years, the Cuckoo Optimization Algorithm (COA) has been widely used to solve various optimization problems due to its simplicity, efficacy, and capability to avoid getting trapped in local optima. However, COA has some limitations such as low convergence when it comes to solving constrained optimization problems with many constraints. This study proposes a new modified and adapted version of the Cuckoo optimization algorithm, referred to as MCOA, that overcomes the challenge of solving constrained optimization problems. The proposed adapted version introduces a new coefficient that reduces the egg-laying radius, thereby enabling faster convergence to the optimal solution. Unlike previous methods, the new coefficient does not require any adjustment during the iterative process, as the radius automatically decreases along the iterations. To handle constraints, we employ the Penalty Method, which allows us to incorporate constraints into the optimization problem without altering its formulation. To evaluate the performance of the proposed MCOA, we conduct experiments on five well-known case studies. Experimental results demonstrate that MCOA outperforms COA and other state-of-the-art optimization algorithms in terms of both efficiency and robustness. Furthermore, MCOA can reliably find the global optimal solution for all the tested problems within a reasonable iteration number.
The Constrained Non-linear Optimization Problem (CNOP) is a common mathematical challenge that arises in various scientific fields, including economics, chemical engineering, finance, mechanics, and multiple branches of engineering. CNOP involves finding the optimal values for a set of variables that minimize or maximize an objective function, while also meeting a set of constraints [1]. These constraints can represent physical limits, economic constraints, or other restrictions on the decision variables. In essence, a CNOP is a type of Non-Linear Programming (NLP) problem, where the objective function and constraints are nonlinear. Solving CNOPs is crucial in many practical applications, such as optimal control, portfolio optimization, process design, and scheduling [2]. However, the complex nature of CNOPs and the existence of multiple local optima make them difficult to solve. To address this challenge, researchers have developed various optimization techniques, including gradient-based methods, evolutionary algorithms, interior-point methods, and constraint-handling techniques. These approaches aim to find efficient solutions to CNOPs by leveraging different strategies and tools from mathematics and computer science. Typically, a constrained optimization problem (COP) is expressed as a Non-Linear Programming (NLP) problem with the following definition:
where there are variables and the function is the fitness function. is the -th constraint of inequality constraints and is the -th constraint of equality constraints. A selection like which satisfies all the above constraints and variable bounds is called a feasible solution, others are infeasible ones.
Sandgren’s method [3] uses a branch-and-bound approach to solve mechanical design optimization problems. This method is known for its accuracy and robustness, but it can be computationally expensive for large problems. The proposed in [4] uses the Simulated Annealing (SA) algorithm to solve mechanical design optimization problems. This method is known for its ability to escape local minima, but it can be slow to converge for large problems. The MVEP method [5] uses Mixed-Variable Evolutionary Programming to solve mechanical design optimization problems. One limitation is its reliance on parameter tuning, as selecting appropriate parameter values can significantly impact the algorithm’s performance and solution quality. Additionally, MVEP may suffer from computational inefficiency due to the generation of unusable mutations, particularly when dealing with large population sizes or complex problem domains. Finally, the method’s effectiveness may be constrained by the need for manual intervention in setting penalty coefficients for handling constraints, which can be challenging and problem-dependent. Coello proposed a self-adaptive penalty approach for genetic algorithm (GA) [6]. One potential drawback of the paper is the lack of empirical validation or experimental results to support the proposed parallel implementation of the algorithm and the effectiveness of the new parameters (Gmax1, Gmax2, M1, and M2). Without such evidence, it’s challenging for readers to assess the practical implications and performance improvements of the proposed modifications. Additionally, the paper could benefit from a more detailed discussion of the potential limitations or challenges associated with the new parallel implementation, including issues related to scalability, communication overhead, and synchronization. Ray and Liew employed the society and civilization algorithm (SCA) [7]. One limitation is the computational intensity associated with operations like clustering, Pareto ranking, and maintaining unique individuals, which can increase the overall computational time, especially for complex problems. Additionally, the algorithm’s reliance on learning from successful instances may limit its ability to explore diverse solution spaces and handle unexpected challenges or uncertainties effectively. Furthermore, the effectiveness of the algorithm may heavily depend on appropriately tuning its parameters, which can be a non-trivial task and may require extensive experimentation. Mezura and Coello proposed a useful infeasible solution with evolutionary algorithms (-ES) [8]. One drawback of the proposed method is its potential vulnerability to local optima, particularly evident in certain problem instances where the approach was trapped in sub-optimal solutions. Additionally, the method’s reliance on proximity to the feasible region for solution selection might lead to sub-optimal solutions if the feasible region is poorly defined or if the method struggles to explore regions further from the boundary. The CPSO-GD approach uses the coevolutionary PSO swarm algorithm by utilizing the Gaussian distribution [9]. This algorithm is known for its ability to optimize the exploration and exploitation of the search space, but it is more computationally expensive than other methods. Cagnina et al. employed the simple constrained PSO Algorithm (SiC-PSO) to solve the engineering optimization problems [10]. One drawback of the proposed method, SiC-PSO, is its reliance on a relatively simple constraint-handling mechanism, which may not adequately address complex constraints. Additionally, the use of a ring topology for implementing the best model may limit the exploration of the solution space, potentially leading to sub-optimal solutions. Furthermore, the algorithm’s performance heavily relies on the choice of parameters, which may require extensive tuning for different problem domains. The authors proposed an effective PSO-based method for constrained problems known as CPSO [11]. One potential limitation is the need for careful tuning of parameters, such as the size of Swarm1 (M1) and the maximum number of evolution generations for Swarm2 (G2), which could impact the algorithm’s performance and scalability. Additionally, the effectiveness of CPSO may depend on the specific problem characteristics, and it might not always outperform other optimization techniques, especially in highly complex or multi-modal optimization landscapes. Moreover, the computational cost associated with running multiple swarms simultaneously could be prohibitive for large-scale problems or resource-constrained environments. In [12], a hybrid PSO was utilized using decision and penalty factors. This approach is known for its ability to enhance the accuracy and robustness of the solutions, but it could be more computationally expensive than other methods. K. Deb, used the Genetic Adaptive Search (GeneAS) [13]. GeneAS’s performance on larger or more complex optimization problems may degrade due to its reliance on genetic algorithms, which can struggle with high-dimensional search spaces. Furthermore, GeneAS may converge prematurely to sub-optimal solutions, particularly in problems with rugged fitness landscapes or deceptive optima. Coello and Mezura employed the genetic algorithm (GA) through the use of dominance-based selection [14]. One potential limitation is the reliance on a single parameter () to maintain diversity in the population, which could affect the algorithm’s performance across different problem domains. Additionally, the method’s effectiveness may vary depending on the complexity and constraints of the optimization problem, and further testing across a wider range of problems is needed to fully assess its robustness. CAC. Coello introduced a multi-objective genetic algorithm (MOGA) [15]. This approach is known for its ability to handle multiple objectives, but it may be more computationally expensive than other methods. GAFAT was a method based on a hybrid genetic algorithm with a flexible allowance technique [16]. This algorithm is known for its ability to enhance the accuracy and the convergence speed of the solutions, but That may be more computationally expensive than other methods. Yuan and Qian introduced a hybrid GA (HGA) to sort out twice continuously differentiable non-linear programming problems [1]. This approach is known for its ability to increase the robustness of the solutions, but That might be more computationally expensive than other methods. In [17], a new method was used based on evaluating differential evolution (DE) with penalty function. Although the method yields competitive results, it fails to outperform the best-known solutions reported in the literature for the tested problems, indicating limitations in achieving global optimality. The effectiveness of the method could heavily depend on parameter settings such as population size, mutation strategies, and penalty value, making it challenging to achieve optimal performance across different problem instances. The MDE algorithm was proposed based on the modified differential evolution [18]. This approach is known for its ability to improve accuracy and convergence speed but could be more computationally expensive than other methods.
The MVDE method was proposed based on a multi-view differential evolution algorithm for solving constrained engineering-design (CED) problems [19]. This approach is known for its ability to enhance the accuracy and robustness of the solutions. W. Long et al. used the hybrid differential evolution augmented modified augmented lagrangian method (MAL-DE) for constrained numerical and engineering optimization [20]. This approach is known for its ability to handle different problems. Montes et al. proposed a modified differential evolution (MDE) for constrained optimization problems [21]. This approach is known for its ability to enhance the accuracy and convergence of the solutions, but this method is more computationally expensive than other methods. Huang et al. used the co-evolutionary differential evolution (CDE) [22]. This approach is known for its ability to enhance the exploitation and exploration of the search space. Wang and Li proposed an effective differential evolution with level comparison (DELC) for constrained design [23]. This approach is known for its ability to handle a variety of issues, but tuning the parameters is difficult. Lampinen used a constraint-handling approach for the differential evolution (DE) algorithm [24]. One potential limitation could be its sensitivity to the choice of control parameters, such as the population size and number of generations, which were adjusted based on problem-specific adaptation. Additionally, the method’s performance may vary depending on the characteristics of the optimization problem, and further research is needed to assess its scalability and applicability to a wider range of problems. Coelho used Gaussian quantum-behaved PSO, known as G-QPSO [25]. This approach is known for its ability to enhance the exploitation and exploration of the search space, but it computationally is more expensive than other methods. quantum-behaved PSO [25], called the QPSO algorithm, is known for its ability to enhance the exploitation and exploration of the search space. Liu et al. employed the PSO algorithm in combination with the differential evolution algorithm (PSO-DE) [26]. This approach is known for its ability to enhance the accuracy and convergence speed of the solutions, but it is more computationally expensive than other methods. Zhang et al. used differential evolution with dynamic stochastic selection (DEDS) [27]. This approach is known for its ability to enhance the exploitation and exploration of the search space. Shen et al. used an improved group search optimizer (iGSO) [28]. This approach is known for its ability to increase the accuracy and convergence speed of the solutions. NM-PSO applied the hybrid Nelder-mead simplex search and PSO algorithm [29]. This approach is known for its ability to increase the accuracy and convergence of the solutions. In addition, Eskandar et al. used the water cycle algorithm (WCA) for this purpose [30]. This approach is known for its ability to handle a broad variety of issues, but it lacks a comprehensive discussion on the specific limitations or drawbacks of the method. Without addressing potential weaknesses such as sensitivity to parameter settings, robustness across problem domains, or scalability to larger problem sizes. Ray and Saini used a swarm with intelligent information sharing among individuals [31]. This approach is known for its ability to optimize exploitation and exploration. Belengundu used eight optimization approaches [32]. Coello and Becerra used cultural algorithms with evolutionary programming (CAEP) [33]. This approach is known for its ability to handle a large number of issues. Karaboga and Basturk proposed the artificial bee colony (ABC) optimization algorithm [34]. This approach is known for its simplicity and flexibility. Brajevic et al. used a simple constrained artificial bee colony (SC-ABC) for constrained optimization problems [35]. While the Simple Constrained Artificial Bee Colony (SC-ABC) algorithm demonstrates competitive performance overall, it faces limitations such as potential convergence issues, particularly evident in the welded beam design problem. Additionally, the algorithm’s reliance on a predetermined scout production period may not always lead to optimal exploration of the solution space, potentially hindering its ability to escape local optima. Wang et al. used the hybrid algorithm and constraint handling technique (HEA-ACT) [36]. This approach is known for its ability to handle several problems. Gaurav et al. proposed the use of optimization techniques to detect odor sources in unfamiliar settings, examining both single odor source (SOS) and multiple odor source (MOS) scenarios with different variables. It demonstrates the effectiveness of the hybrid teaching learning particle swarm optimization (HTLPSO) method compared to traditional approaches like particle swarm optimization (PSO) and teaching learning-based optimization (TLBO), showcasing its superior performance, particularly in larger environments and diverse conditions of MOS [37].
On the other side, Abdollahi et al. proposed slack variables to represent a method for handling constraints of nonlinear optimization [38]. The proposed Imperialist Competitive Algorithm (ICA) [39, 40] for solving constrained nonlinear optimization problems has several drawbacks. Firstly, its efficiency and scalability might be hindered by complexity issues, especially in high-dimensional optimization problems. Secondly, the algorithm’s performance heavily relies on parameter settings, making it sensitive to parameter choices and potentially requiring extensive tuning. Lastly, the limited comparison with other methods and the lack of comprehensive evaluation across diverse problem domains may limit its applicability and generalization. S. Akhtar et al. used the socio-behavioral simulation algorithm (SBA) for engineering the design optimization [41]. This approach is known for its ability to handle different problems. Gandomi et al. used the cuckoo search algorithm (CSA) to solve the structural optimization problems [42]. This approach is known for its ability to handle a large number of issues. In addition, the LCA method uses a league championship algorithm for constrained global optimization problems [43]. One limitation is the lack of theoretical foundations or formal convergence proofs, making it difficult to assess its convergence behavior rigorously. Additionally, the subjective nature of parameter tuning in LCA could lead to sub-optimal performance or require significant trial and error. Wang et al. proposed a hybrid evolutionary algorithm with an adaptive constraint-handling technique for the constrained optimization problems [36]. This approach is known for its ability to handle problems. Coelho and Mariani, employed the combinations of an ant colony-inspired algorithm and chaotic sequences (ACH) for the continuous engineering optimization problems [44]. This approach is known for its ability to enhance exploration. Wang et al. proposed the accelerating adaptive trade-off model (AATM) using the shrinking space method for constrained optimization [45]. Mahdavi developed an improved harmony search (IHS) algorithm for solving optimization problems [46]. Abdollahi et al. modified the CS algorithm by implementing a decreasing rate of , starting from its maximum value and gradually approaching zero, rather than using a constant value [2]. The results of their study indicated that this modification enhanced the performance of the CS local search, particularly in the context of solving systems of nonlinear equations. CLFD [47] was developed as a new optimization algorithm by incorporating chaotic maps into the elementary Levy flight distribution (LFD) to improve its rate of convergence and solve engineering optimization problems. Liu et al. [48] proposed the Universal Learning Chimp Optimization Algorithm (ULChOA), a variation of ChOA, to address the challenging constraint search space in real-world engineering problems. ULChOA utilizes a unique learning method that updates the best solution’s position using all previous best knowledge obtained by chimps while maintaining variety and discouraging early convergence. It also introduces an innovative constraint management technique for handling constraints in constrained optimization issues. The Multi-objective Lichtenberg Algorithm (MOLA) is a newly developed hybrid meta-heuristic designed to handle multiple objectives [49]. It uses a unique approach, distributing points through a Lichtenberg figure that is shot in various sizes and rotations at each iteration.
The existing methods for solving mechanical design problems suffer from large population sizes and slow convergence of evolutionary algorithms to the global minimum. Thus, it is crucial to find an optimal method for overcoming these challenges. In this regard, the Modified Cuckoo Optimization Algorithm (MCOA) with an appropriate penalty function was proposed in this article as a means to solve constrained engineering problems with a smaller population size while still achieving accurate solutions. To evaluate the effectiveness of the method, five commonly encountered engineering design problems were selected, and their results were compared with those obtained from other approaches that were used to tackle the same set of issues.
The rest of the paper is organized as follows: In Section 2, COA is described. Section 3 proposes a new idea to optimize the COA. In Section 4, the penalty method is introduced to handle the constraints of problems. Section 5 presents the obtained results for the numerical examples, and in Section 6, the obtained results are compared with related methods. Finally, the conclusions and future work are mentioned.
Cuckoo optimization algorithm
R. Rajabioun [50] proposed the Cuckoo optimization approach, which draws inspiration from the behavior of cuckoo birds. To solve optimization problems, the values of variables must be represented as an array. This array, referred to as “Country” and “Particle Position” in ICA and PSO [51, 52, 53] respectively, represents a potential solution to the optimization problem. In COA [54], this array is referred to as “habitat.” A habitat is a one-dimensional array () that identifies where a cuckoo resides. The cost of a habitat is evaluated using the fitness function, which is maximized by COA. To minimize the cost, the fitness function can be multiplied by 1. The most significant functions of COA are egg-laying and offspring reproduction. Like other evolutionary algorithms, COA starts with a randomly generated population of cuckoos (). Therefore, the population is represented as a matrix. Subsequently, several eggs are laid randomly for each cuckoo habitat. Each cuckoo has a unique egg-laying range determined by lower limits () and upper limits (). The lower and upper limits imposed on each cuckoo habitat regulate the total quantity of eggs produced.
The lower and upper limits imposed on each cuckoo habitat refer to the range within which the variable values for a particular cuckoo can vary. These limits play a crucial role in regulating the total quantity of eggs produced by each cuckoo habitat. Essentially, they determine the permissible range of values for each variable in the optimization problem. By constraining the variable values within these limits, the algorithm ensures that the generated solutions remain within feasible bounds. This helps in maintaining diversity within the population and prevents solutions from straying too far from the search space. Therefore, the lower and upper limits serve as important parameters for controlling the exploration and exploitation balance of the optimization process.
This process is repeated across every iteration. In nature, cuckoos lay their eggs near their surroundings, and this maximum range is referred to as the “Egg Laying Radius (ELR)”. Each cuckoo has its own ELR, which is defined as follows:
where was an integer number, supposed to handle the maximum value of ELR.
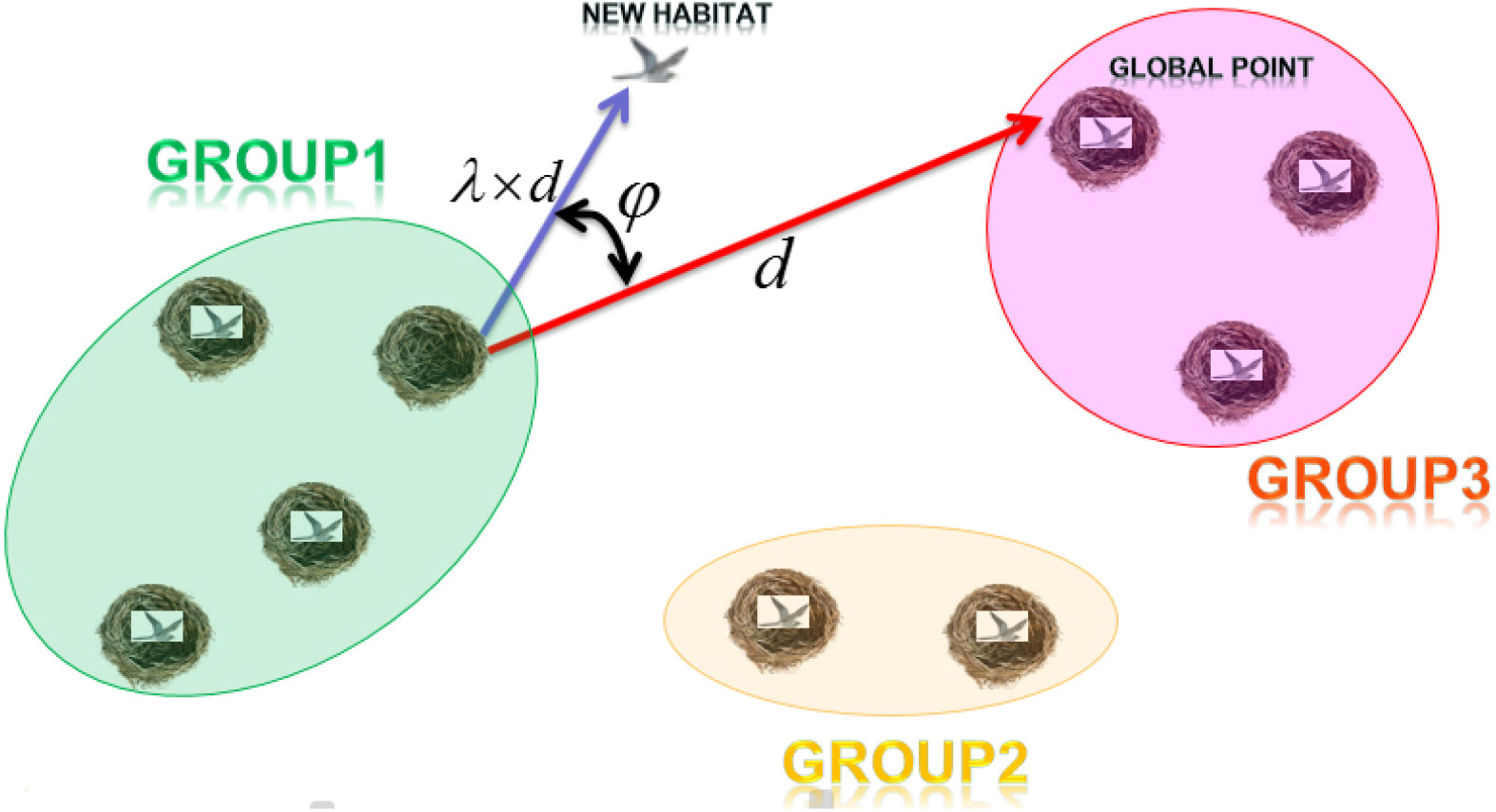
Once each cuckoo’s ELR was defined, they proceeded to lay eggs randomly in the nests of other host birds within their ELR. After the egg-laying process was complete, host birds would destroy a percentage (usually 10%) of all eggs with lower cost values. When the young cuckoos reached adulthood, they had to migrate to new habitats with higher cost values than their previous ones to survive and develop. This problem increased their chances of survival and growth. It is worth noting that cuckoos live in distinct groups in nature. To determine which group a cuckoo belongs to, the k-means clustering method is employed, with being an adjusted number according to the size and complexity of the search space. In larger search spaces with higher dimensions or greater variability, the number of clusters () tends to increase, allowing for a finer partitioning of the search space. Conversely, in smaller search spaces with fewer dimensions or less variability, the number of clusters decreases to avoid overfitting and unnecessary fragmentation. As the cuckoos begin flying towards the target habitat, they only cover a fraction of the distance with a slight deviation. Each cuckoo travels only of the total distance () to the target habitat, with a variance of radians. This approach makes it easier for cuckoos to obtain food. For each cuckoo, and are defined as follows:
The immigration of new cuckoos to the goal habitat is a crucial step in the Cuckoo Optimization Algorithm (COA) where the algorithm ensures that the best solutions found so far are preserved and further explored. After identifying the best habitat through clustering in step 10, the algorithm aims to enhance the diversity and exploration capability by introducing new cuckoos to this habitat. These new cuckoos are generated based on the characteristics of the best habitat, such as its location in the search space and its fitness value.
As Fig. 1 shows, the immigration process involves creating new solutions, often by perturbing or modifying existing solutions found in other habitats or through random generation. These new solutions are then introduced to the best habitat, where they undergo evaluation based on the objective function. If a new solution improves upon the existing solutions in the habitat, it is retained; otherwise, it is discarded. By introducing new cuckoos to the best habitat, the algorithm seeks to further explore the neighborhood of the best solution found so far. This helps prevent premature convergence by encouraging the exploration of promising regions of the search space beyond the current best solution. Additionally, it helps maintain diversity within the population, which is crucial for escaping local optima and finding the global optimum. Overall, the immigration step contributes to the effectiveness and robustness of the optimization process in COA.
Immigration of a sample cuckoo toward the global point (goal habitat).
Real-life scenarios are often characterized by food and space limitations. To replicate this fact and maintain the population balance of cuckoos, the variable is utilized to restrict the number of live cuckoos in nature. After several iterations, all of the cuckoos will gather in the nest with the highest income. The eggs in this nest are the most similar to one another, with more abundant food supplies and fewer egg losses than in other nests. If more than 95% of the cuckoos congregate in the same environment, the COA algorithm is terminated. Consequently, the COA is employed to address specific problems in the current study. The researchers have provided a modified coefficient for ELR, which we will discuss in the next section.
Modified cuckoo optimization algorithm
In Section 2, it is highlighted that the standard COA algorithm may not always be effective in finding accurate solutions to certain engineering problems. One of the reasons for this limitation is that the coefficient in the egg-laying radius is fixed throughout the process. This can lead to COA identifying only solutions that are close to the global optimum if the amount of is large. Conversely, if has a small value, COA may become trapped in local optima. These limitations motivated researchers to develop a more flexible formula for ELR. The primary objective of this study was to create an adaptable radius for the ELR equation. It should be noted that in the previous approach, the coefficient was fixed as the radius. The new approach introduced into Eq. (2), making the amount of more flexible. By doing so, the method was able to quickly and accurately identify the optimal solution.
where is defined as follows:
where the Iter is the iteration number.
This formula determines the value of based on the current iteration number Iter. Let’s analyze its behavior:
As the iteration number increases:
The denominator increases.
Since grows logarithmically with Iter, the increase in the denominator becomes slower as Iter increases.
Consequently, the value of decreases as the iteration number increases.
As the iteration number approaches infinity:
The logarithmic term approaches infinity.
The denominator approaches infinity.
Therefore, the value of approaches zero as the iteration number approaches infinity.
In summary, the behavior of the formula ensures that as the optimization algorithm progresses through iterations, the value of gradually decreases. This gradual decrease facilitates the reduction in the radius size (), allowing for finer adjustments in the search space exploration. Additionally, the formula ensures that approaches zero as the number of iterations increases, indicating a diminishing effect on the reduction of the radius size over time. This balance between decreasing and the diminishing impact on radius reduction helps maintain exploration capability while promoting convergence towards optimal solutions in the later stages of the optimization process.
It is worth noting that the proposed approach offers two advantages. Firstly, has the effect of reducing the radius size. Secondly, it is automatically adjusted by increasing the iterations. As a result, there is no need to manually set during the process. Various types of were tested with different relationships until arriving at Eq. (5). Therefore, the proposed method can be made more efficient by implementing the following formula:
Algorithm 3 presents the main steps of the MCOA as a pseudo-code. In the proposed method, the quantity of is automatically adjusted during the optimization process by gradually reducing the radius size. This is done using Eq. (6), which offers greater flexibility than the fixed value of used in the standard COA algorithm. By shrinking the radius during the process, the proposed method allows for more precise identification of the optimal solution.
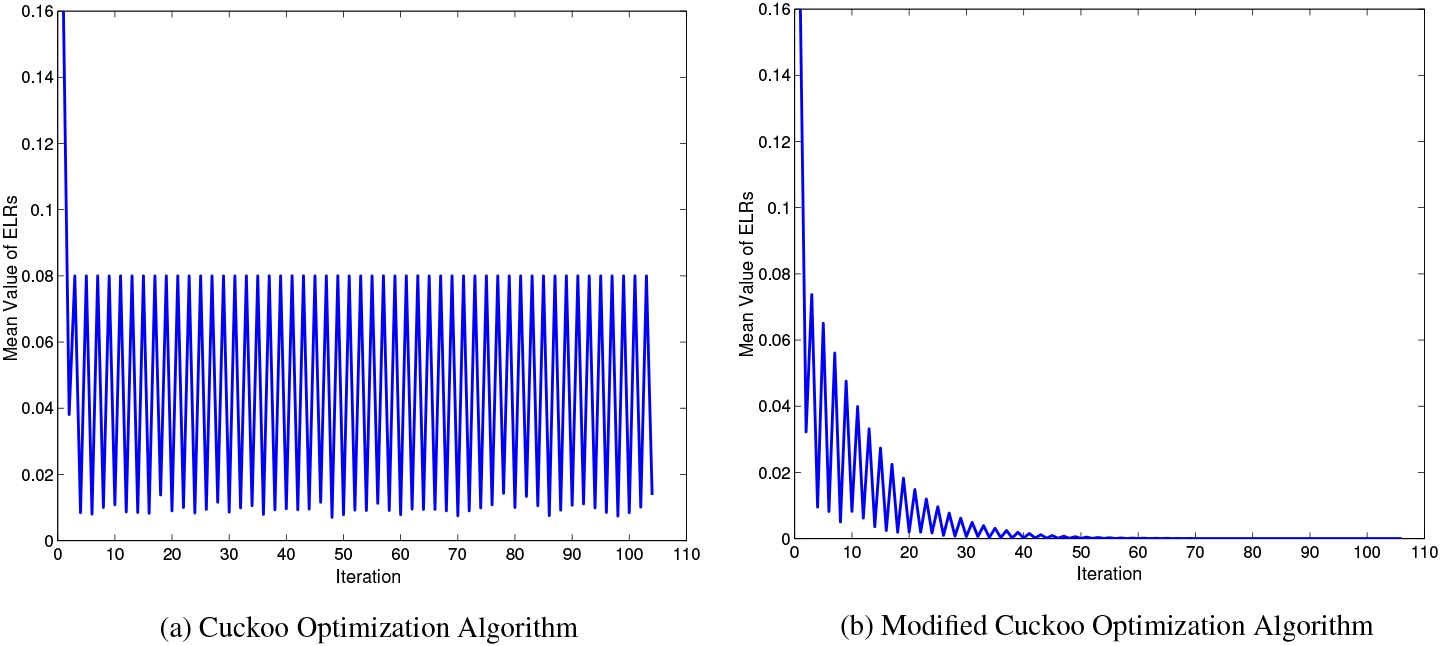
Figure 2 demonstrates the effectiveness of the modifications made in the proposed method. As shown in the left figure, the mean egg-laying radius for each iteration in the standard COA algorithm remains largely unchanged throughout the optimization process. However, in the modified algorithm, as shown in the right figure, the radius size is gradually reduced, resulting in a more significant difference between the early and later iterations. This improvement is particularly evident in case (b), where the modified algorithm has sufficient time in the early iterations to reach a solution close to the global optimum. Overall, the modifications made in the proposed method make it more efficient in finding accurate solutions than the previous COA approach.
[!htp] InputInput OutputOutput filterByLayerfilterByLayermergeLayersmergeLayersfindHighestTimefindHighestTime eNullnullgetInputsSatisfiedgetInputsSatisfiedcalculateFitnesscalculateFitness Pseudo-code for Modified Cuckoo Optimization Algorithm (MCOA)Initialized habitats using the profit objective function The best global point Initialize habitats using the profit objective function; and Assign eggs to cuckoos;Compute the ELR coefficient () using Eq. (4) with coefficient from Eq. (5);Define ELR for each cuckoo using Eq. (6);Cuckoos lay eggs in the ELR;Kill host birds’ eggs;Growing the chicks;Calculating the habitat;Limiting and killing the worst habitats’ cuckoos;Clustering and finding goal’s best habitat;Immigration of the new cuckoos to the goal habitat;the best global point;
The termination criterion specified in the 2th step of the algorithm states, ‘If the iteration number is lower than the max iteration, continue.’ This criterion implies that both the Modified Cuckoo Optimization Algorithm (MCOA) and the Cuckoo Optimization Algorithm (COA) should iterate up to the maximum iteration specified.
However, MCOA includes an additional termination condition based on the coefficient for which used to compute the Egg Laying Radius (ELR). If the ELR becomes zero before reaching the maximum iteration number, MCOA terminates early. This condition allows MCOA to stop the algorithm before completing all iterations, while COA must terminate when the number of iterations reaches the maximum specified.
Therefore, the observed difference in termination between MCOA and COA, as depicted in Figs 3, 4, 6 and 7, can be attributed to MCOA’s ability to stop early based on the ELR criterion. This feature provides MCOA with flexibility in termination, potentially leading to different convergence behaviours compared to COA.
The mean of egg laying radiuses in each iteration.
Constraints handling
The used methods for handling the constraints in the constrained optimization problems were very important. A common approach to solving the constrained problems was using the penalty functions. The penalty function replaced a constrained optimization with an unconstrained optimization. In this case, a penalty function penalized the infeasible solutions of the search space to generate a poor fitness value, and it was 0 for feasible solutions as follows:
The amount of was applied for infeasible solutions. The constrained inequalities in the form were penalized by the following method:
where was a positive constant. In all cases, the constrained inequalities were in the form of . These constraints could be multiplied by the number 1 and converted to constraints in the form . Then the method (8) could be used for handling the converted constraints. If was the constraint form, the absolute value of constraint () would be added to function .
The main advantage of this method was that: “each penalized infeasible solution depends on a measure of violation of the constraints.” Therefore, the MCOA could be able to find better solutions.
Numerical case studies
Through the present section, five commonly explored problems were used to demonstrate the performance of the MCOA, and the results were compared with similar methods. The selected problems were the three-bar truss design problem, the speed reducer design problem, the design of a pressure vessel, the minimization of the weight of a tension/compression string, and the welded beam design problem. The proposed method was coded in MATLAB R2018a tool and was run on a CPU i5 2.3-2.8 GHz, RAM 4 GB, and OS Windows 8.1. The best results were obtained by 50 runs. The used parameters for solving the selected engineering problems are shown in Table 1 and the optimal values of the parameters in each case study were accessible by a few tests using different values. Through the MCOA method, for having an accurate local search, the egg-laying was decreased gradually from the initial value to 0 with a linear decreasing rate.
Used parameters in modified cuckoo optimization algorithm for case studies
Parameters
Three-bar truss design problem
Speed reducer design problem
The design of a pressure vessel
The tension/ compression string
Welded beam design problem
Initial pop.
5
5
5
5
5
Range of eggs
[2, 16]
[2, 3]
[2, 9]
[2, 3]
[2, 11]
Maximum of cuckoos
10
10
25
15
30
Number of clusters
1
1
2
1
2
Motion coefficient
4
6
6
10
6
Egg laying radius
0.8
1
0.1
0.07
2
Pop. variance
1E-130
1E-130
1E-13
1E-130
1E-130
q
1800
1800
18000
18000
18000
Best result of MCOA for the first case study
Design variables
Values
0.
788675151948805
0.
408248241379362
0.
000000000000000
1.
464101670937613
0.
535898329062387
263.
8958433764686
Comparison of results for the three-bar truss design problem
The performance of the proposed modification was tested by solving the five case studies (as it was shown in the previous section). The constraints of each problem were handled by the proposed penalty function which was described in Section 3. We compared the obtained results with other optimizers.
Case study 1
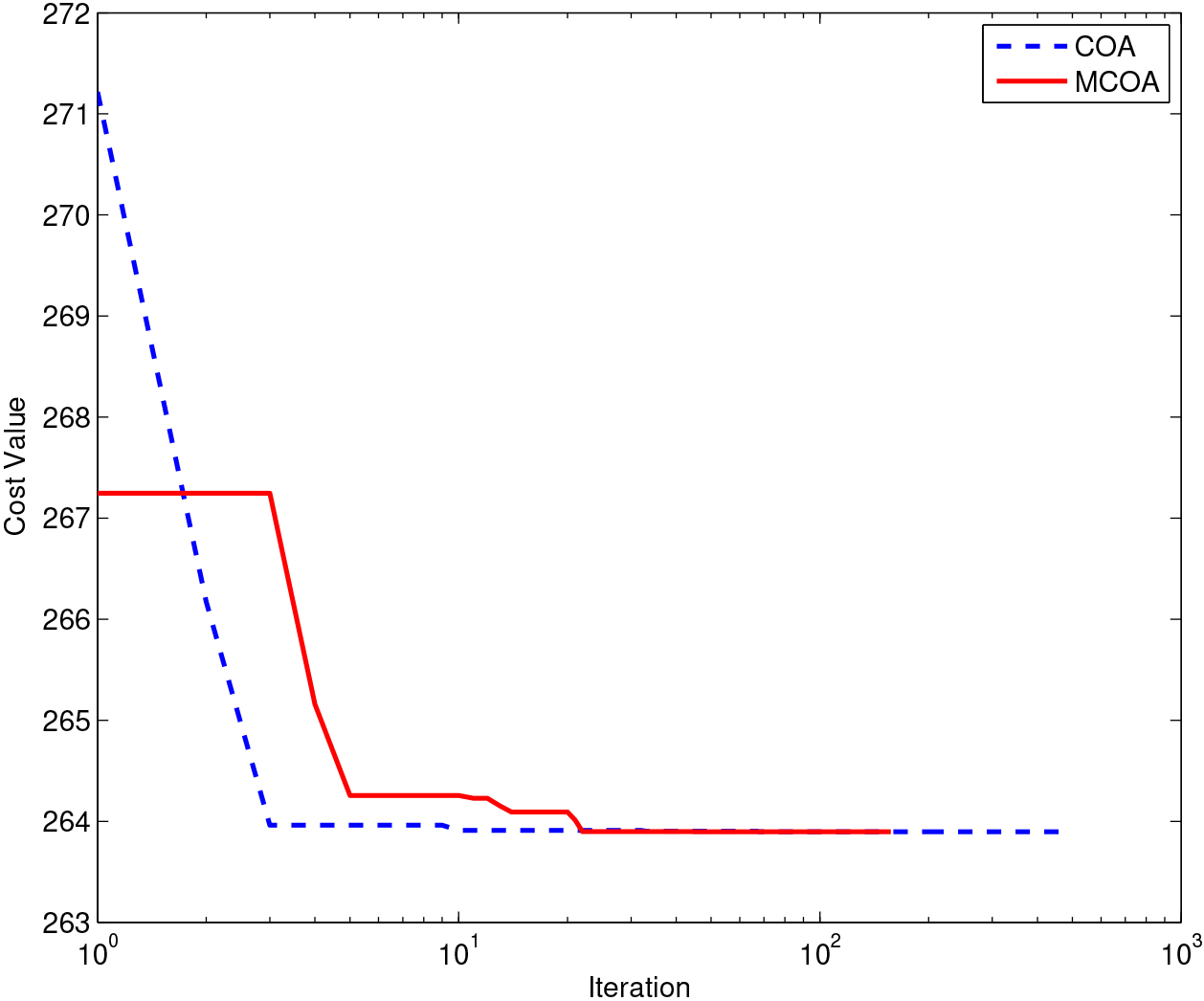
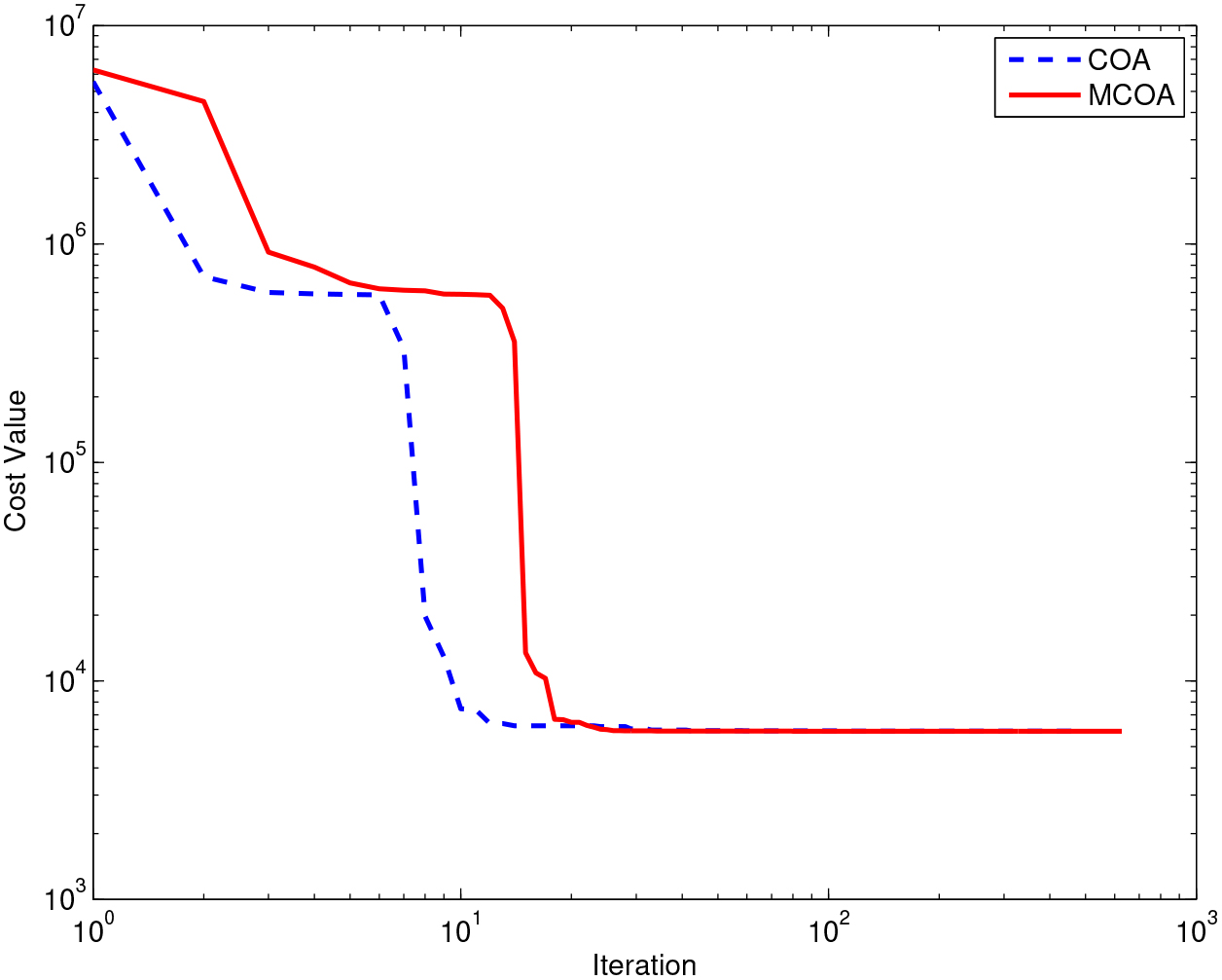
The three-bar-truss problem was the first engineering test problem of the present article. This constrained engineering problem was used as a benchmark by other methods like GAFAT [16], WCA [30], SCA [7], LCA [43], PSO-DE [26], DELC [23], DSS-DE [27], MAL-DE [20], MVDE [19], HEA-ACT [36], CSA [42], AATM [45] and COA. The accurate solution of the proposed method is presented in Table 2 and compared with prior methods in Table 3. Table 4 shows the comparison of the statistical results. The best solution obtained by each method signifies its capability to find the optimal or near-optimal solution. MCOA achieves the best solution with a value of 263.895843, indicating its effectiveness in minimizing the objective function for the three-bar truss problem. The standard deviation reflects the consistency of solutions obtained by each method. MCOA exhibits a very low standard deviation (1.061086E-004), indicating high consistency in finding solutions close to the mean. This suggests that MCOA not only achieves good mean solutions but also maintains consistency in its performance. MCOA demonstrates efficiency in terms of the number of function evaluations required to obtain the reported solutions. With only 5,235 function evaluations (NFEs), MCOA outperforms many other methods in terms of computational efficiency, including COA. Figure 3 shows the obtained convergence charts of COA and MCOA with the same parameters set.
Comparison of results for the speed reducer design problem
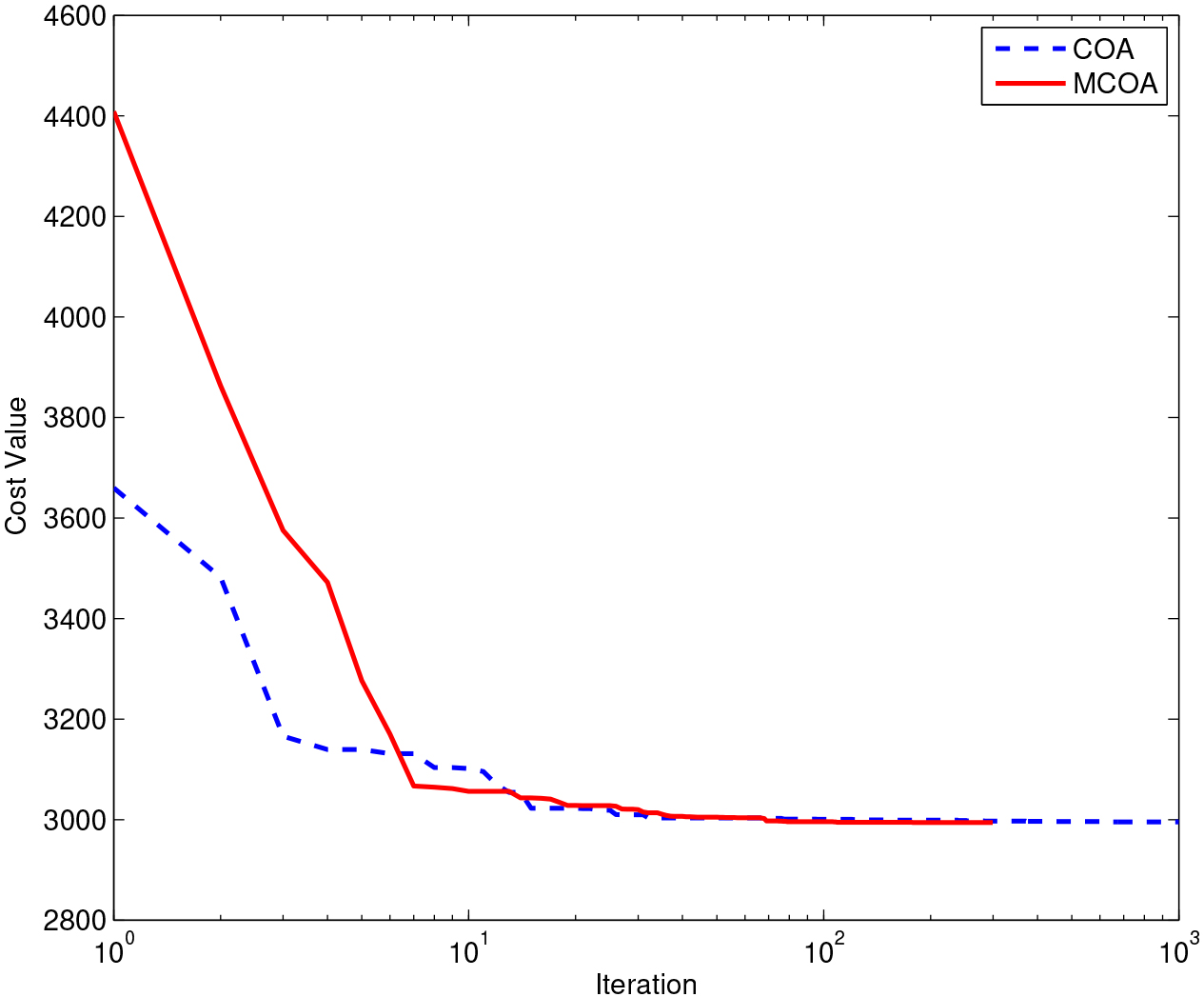
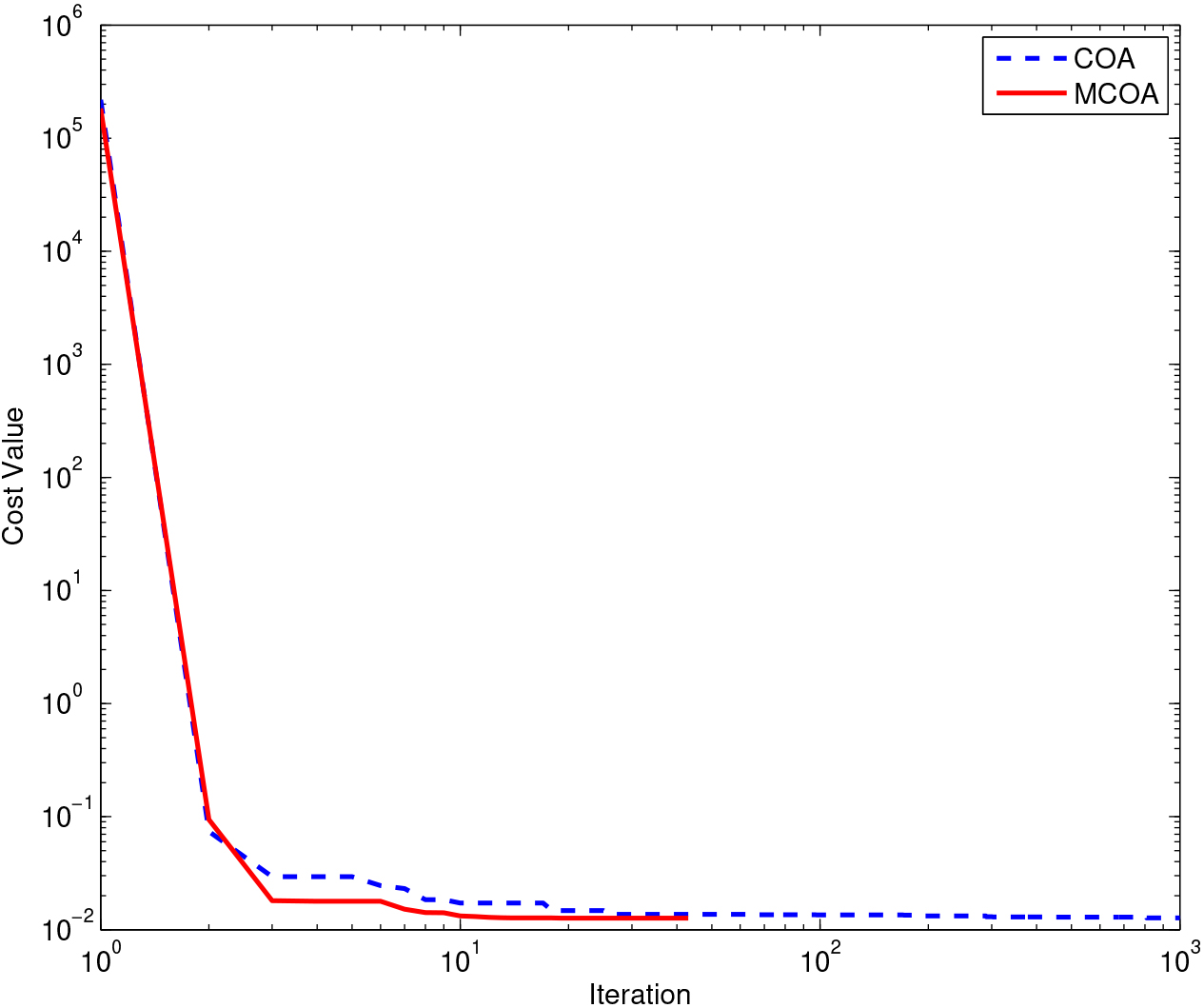
The second benchmark of the present paper was the speed reducer design problem that was used as an engineering test problem in WCA [30], ABC [34], SBA [41], SCA [7], SC-ABC [35], SiC-PSO [10], PSO-DE [26], MDE [18], DELC [23], DSS-DE [27], DELC [21], MAL-DE [20], MVDE [19], -ES [8], HEA-ACT [36], GAFAT [16], AATM [45] and COA. Table 5 showed the best solution of our method. The best solution for case 2 was compared with earlier techniques in Table 6. MCOA demonstrates efficiency in terms of the number of function evaluations required to obtain the reported solutions. With only 5,000 NFEs, MCOA achieves competitive results while requiring fewer computational resources compared to other methods. For the comparison of the statistical results, it is better to see Table 7. The mean solution values provide insights into the average performance of each optimization method. MCOA achieves the lowest mean solution value of 2994.471156290329, indicating its effectiveness in minimizing the objective function for the speed reducer design problem. This is closely followed by the MAL-DE [20] method, which also achieves a mean solution value close to that of MCOA. The best solution obtained by each method represents its capability to find the optimal or near-optimal solution. MCOA outperforms all other methods with the best solution value of 2994.470670417488, indicating its superiority in achieving high-quality designs for the speed reducer. MCOA exhibits a very low standard deviation (4.266567549747882E-004), indicating high consistency in finding solutions close to the mean. This
Comparison of results for the design of a pressure vessel problem
consistency suggests that MCOA reliably converges to near-optimal solutions across multiple optimization runs. The comparison convergence charts of COA and MCOA are shown in Fig. 4.
The convergence chart of case study 2.
Case study 3
The present problem was used as a case study in MVEP [5], GA [6, 14], GeneAS [13], iGSO [28], GAFAT [16], MOGA [15], G-QPSO [25], CPSO [11], HPSO [12], CPSO-GD [9], NM-PSO [29], SiC-PSO [10], CDE [22], PSO-DE [26], DE [17], MDE [18], MAL-DE [20], MVDE [19], WCA [30], -ES [8], Sandgren [3], SCA [7], SA [4], SBA [41], CSA [42], SC-ABC [35], ACH [44], AATM [45] and COA. Our best solution for this problem in Table 8 was compared with other methods as has been given in Table 9. The comparison of the obtained two sets of statistical results in our approach with other methods was reported in Table 10. The proposed method in the present article was conducted to obtain two statistical results as shown in Table 10. The first results were provided for 27,500 function evaluations and the second results were obtained for 8000 function which was used by H. Eskandar et al. [30].
Best result of MCOA for the fourth case study
Design variables
Parameters
Values
0.
051690248631955
0.
356746270413256
11.
287301636288820
6.
131154963728847E-007
8.
878430024505946E-008
4.
053838396206322
0.
727708987303193
0.
012665241574690
The convergence chart of case study 3.
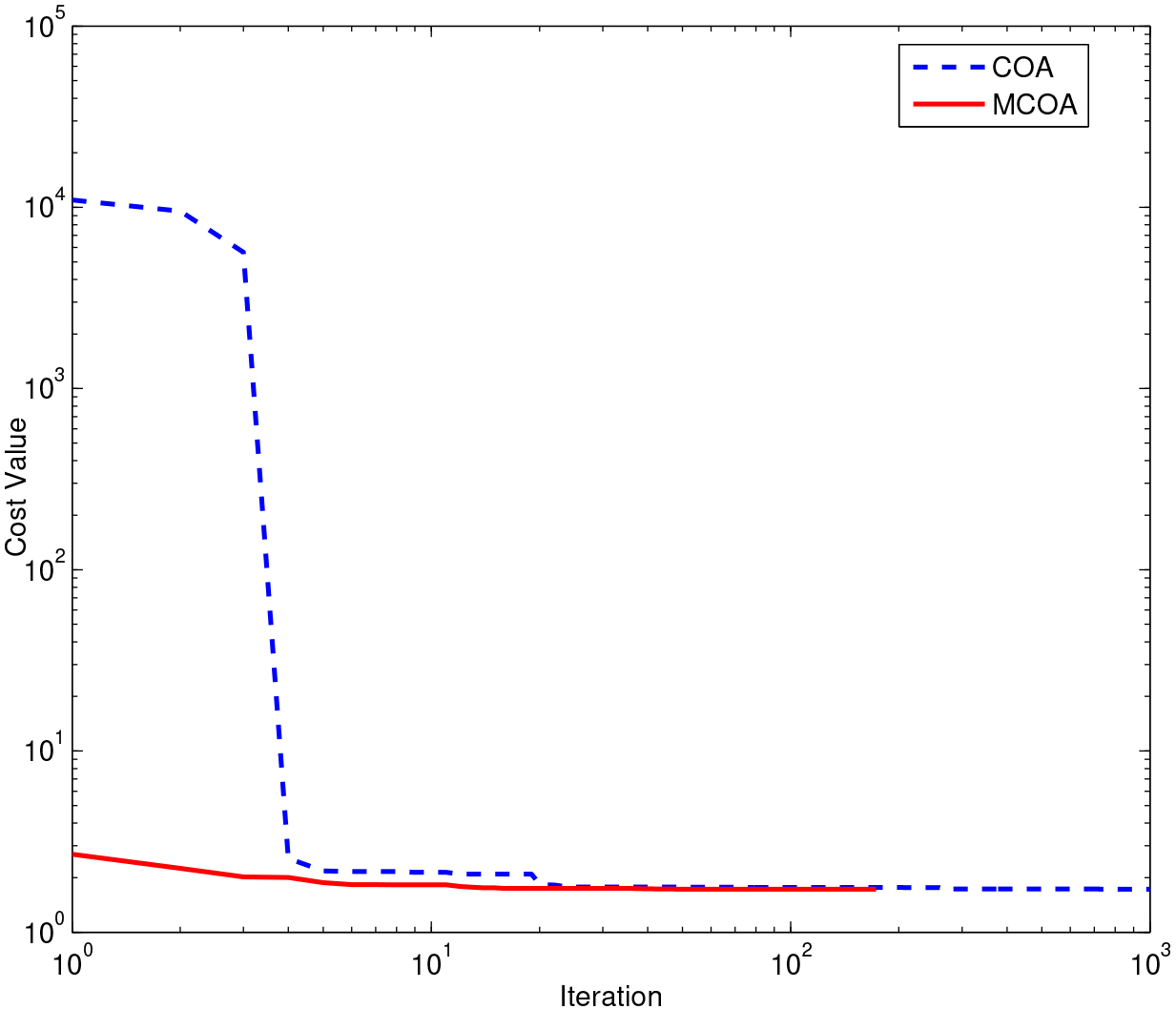
According to Table 10, the pressure vessel design problem showcases the MCOA as the standout performer, yielding superior solutions compared to other optimization methods. Notably, the MCOA achieves the best solution with a significantly lower objective function value of 5885.3322, showcasing its ability to deliver high-quality designs. The solution obtained by H. Eskandar et al. [30] closely approaches the performance of MCOA, indicating the competitive edge of the proposed approach.
The convergence charts of COA and MCOA for case study 3, as illustrated in Fig. 5, highlight one of the key advantages of MCOA. The MCOA exhibits a rapid reduction of the cost function values towards the near-optimal solution, especially in the early iterations, indicating its efficient convergence properties.
Comparison of results for the tension/compression spring-problem
This early convergence ensures faster attainment of high-quality solutions, enhancing the efficiency of the optimization process.
Furthermore, Table 10 reveals that MCOA achieves a superior standard deviation compared to COA, indicating greater stability and consistency in solution quality across multiple optimization runs. This enhanced stability underscores the reliability of MCOA in consistently converging to near-optimal solutions for the pressure vessel design problem.
Best result of MCOA for the fifth case study
Design variables
Parameters
Values
0.
205729639530000
3.
470488676830000
9.
036623924470000
0.
205729639720000
3.
478529652056750E-005
8.
406527558690868E-005
1.
900000157206705E-010
3.
432983782432989
0.
080729639530000
0.
235540322647854
3.
789164111367427E-007
1.
724852311657462
Case study 4
The tension/compression spring design problem was described in [55] and was solved previously in GA [6, 14], iGSO [28], GAFAT [16], CAEP [33], G-QPSO [25], CPSO [11], HPSO [12], CPSO-GD [9], NM-PSO [29], SiC-PSO [10], PSO-DE [26], DE [24, 17], MDE [18], DELC [23], DEDS [27], MAL-DE [20], MVDE [19], WCA [30], ABC [34], SC-ABC [35], -ES [8], SCA [7], Belengundu [32], Ray and Saini [31], HEAA [36], AATM [45] and COA. The best-known solution to this problem obtained by E. Zahara and Y.T. Kao in [29] was 0.012630. In this work, Table 11 showed our best result that was produced by the proposed approach. The other methods as shown in Table 12 could not find the solution found by E. Zahara and Y.T. Kao. The comparison of the statistical results is presented in Table 13. The first set of statistical results was found by 3500 function evaluations and the second set was obtained by 2000 function evaluations.
Table 13 presents the statistical results of various optimization methods applied to the tension/compression spring problem. Notably, E. Zahara and Y.T. Kao achieved a solution with a minimum objective function value of 0.012630 using 80,000 function evaluations [29]. However, our proposed MCOA demonstrates its competitive edge by achieving an even lower objective function value of 0.012665 with a significantly reduced number of function evaluations, only 2000. This remarkable performance underscores the efficiency and effectiveness of the MCOA in identifying high-quality solutions within a limited computational budget, outperforming previous approaches in terms of solution quality and computational effort.
Moreover, the MCOA exhibits superiority in both mean and standard deviation compared to other optimization methods, further validating its efficacy in consistently converging to high-quality solutions with reduced variability. This indicates the robustness and reliability of the MCOA in tackling the tension/compression spring problem across multiple optimization runs, enhancing confidence in its performance and applicability in real-world engineering optimization scenarios.
Figure 6 demonstrated the convergence charts of case study 4 for COA and MCOA. In this chart, the values of the cost function in MCOA were reduced to the near-optimum point in the early iterations. The obtained solutions for the fourth case study have been stable by 50 independent runs.
Comparison of results for the welded beam design problem
The welded beam design problem was the fifth case study of the present paper that was used as a test in GA [6, 14], GAFAT [16], MOGA [15], HGA [1], CAEP [33], WCA [30], CPSO [11], HPSO [12], CPSO [9], NM-PSO [29], PSO-DE [26], CDE [22], DE [24], MDE [18], DELC [23], MVDE [19], -ES [8], IHS [46] and COA. The details of the best solution by our method are indicated in Table 14. The comparison of the results for the welded beam design problem is presented in Table 15. The convergence of the MCOA was much faster than COA (see Fig. 7).
The statistical results presented in Table 16 outline the performance of various optimization methods applied to the welded beam design problem. Among these methods, the MCOA stands out as it achieves the best performance in terms of both mean and best objective function values, with values of 1.7248535 and 1.724852, respectively. Notably, the MCOA also exhibits the lowest standard deviation (5.8869411E-006), indicating a high level of consistency in its solutions.
Comparing the MCOA’s results with other optimization techniques, it is evident that the MCOA outperforms many of the traditional approaches such as Genetic Algorithm (GA), Cooperative Particle Swarm Optimization (CPSO), Differential Evolution (DE), and Hybrid Particle Swarm Optimization (HPSO). While these methods achieve competitive results, the MCOA demonstrates superior performance by consistently converging to high-quality solutions with minimal variability.
Furthermore, the computational efficiency of the MCOA is highlighted by its relatively low number of function evaluations (18,000), which is substantially lower compared to several other methods requiring significantly higher computational budgets. This efficiency makes the MCOA an attractive choice for optimization tasks where computational resources are limited or need to be allocated efficiently.
The statistical results of the number of fitness evaluations (NFEs) for the benchmarks are presented in Table 17. It is obvious that the mean of the NFEs of MCOA in all of the case studies is less than COA.
At the end, to indicate a significant difference between the results of the proposed MCOA algorithm with other methods, statistical analysis is carried out. We applied the Friedman test to realize whether there are substantial differences in the results of the evolutionary algorithms. In this test, the alpha was set to 0.05 ( 0.05) as the level of confidence in all cases. Table 18 reveals the obtained results of the mean ranking of these algorithms by Friedman’s test based on three-bar truss design, speed reducer design problem, and tension/compression spring-problem. As shown in this table, the proposed MCOA algorithm is ranked first for both three-bar truss design and speed reducer design problems whereas it is ranked fourth (the second rank value). Friedman test indicates that the proposed MCOA algorithm has a significant difference in the results of the other algorithms.
Conclusions and future works
The present article introduced the modified Cuckoo optimization algorithm (MCOA) with a suitable penalty function for solving constrained engineering problems. Five well-known case studies were presented to demonstrate the efficiency of the proposed modification in comparison with other algorithms such as GA, GAFAT, MOGA, ABC, SC-ABC, CDE, MDE, DELC, DSS-DE, MAL-DE, MVDE, PSO, CPSO, HPSO, G-QPSO, NM-PSO, AATM, IHS and WCA. By utilizing a suitable coefficient for ELR, the modified COA outperformed other considered optimization methods. One of the advantages of the present approach was that it could converge to the best solution faster than the other algorithms with less number of function evaluations. Another advantage of this work was the better quality of the obtained solutions. According to the results, it could be concluded that the proposed MCOA could outperform the mentioned methods. As a future work, it is attempted that to increase the speed of the convergence for MCOA by using of chaos theory for .
Ethical approval
All authors state that this study is the author’s original work, which has not been previously published elsewhere. The paper is not currently being considered for publication elsewhere. The paper reflects the author’s research and analysis truthfully and completely.
Competing interests
All authors state that there is no conflict of interest.
Authors’ contributions
The statement, conceptualization, and implementation were performed by Asgarali Bouyer. Bahman Arasteh and Asgarali Bouyer implemented and performed the implementations. Mahdi Abdollahi provided data collection, and analyzed the data, and wrote the manuscript. A. Bouyer re-edited and analyzed the results and proofread the paper.
Funding
The authors declare that no funds were received during the preparation of this manuscript.
Availability of data and materials
The datasets generated during and the implemented code during the current study will be available when required by the reviewers or readers.
Footnotes
Appendix 1: Description of numerical case studies
References
1.
YuanQQianF. A hybrid genetic algorithm for twice continuously differentiable NLP problems. Computers & Chemical Engineering. 2010; 34(1): 36–41.
2.
AbdollahiMBouyerAAbdollahiD. Improved cuckoo optimization algorithm for solving systems of nonlinear equations. The Journal of Supercomputing. 2016; 72: 1246–1269.
3.
SandgrenE. Nonlinear integer and discrete programming in mechanical design optimization. 1990.
CaoYJWuQH. Evolutionary programming. In IEEE Conference on Evolutionary Computation. 1997. pp. 443–446.
6.
CoelloCAC. Use of a self-adaptive penalty approach for engineering optimization problems. Computers in Industry. 2000; 41(2): 113–127.
7.
RayTLiewKM. Society and civilization: An optimization algorithm based on the simulation of social behavior. IEEE Transactions on Evolutionary Computation. 2003; 7(4): 386–396.
8.
Mezura-MontesECoelloCAC. Useful infeasible solutions in engineering optimization with evolutionary algorithms. In Mexican International Conference on Artificial Intelligence. Springer; 2005. pp. 652–662.
9.
KrohlingRAdos Santos CoelhoL. Coevolutionary particle swarm optimization using Gaussian distribution for solving constrained optimization problems. IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics). 2006; 36(6): 1407–1416.
10.
CagninaLCEsquivelSCCoelloCAC. Solving engineering optimization problems with the simple constrained particle swarm optimizer. Informatica. 2008; 32(3).
11.
HeQWangL. An effective co-evolutionary particle swarm optimization for constrained engineering design problems. Engineering Applications of Artificial Intelligence. 2007; 20(1): 89–99.
12.
HeQWangL. A hybrid particle swarm optimization with a feasibility-based rule for constrained optimization. Applied Mathematics and Computation. 2007; 186(2): 1407–1422.
13.
DebK. GeneAS: A robust optimal design technique for mechanical component design. In Evolutionary Algorithms in Engineering Applications. Springer; 1997. pp. 497–514.
14.
CoelloCACMontesEM. Constraint-handling in genetic algorithms through the use of dominance-based tournament selection. Advanced Engineering Informatics. 2002; 16(3): 193–203.
15.
Coello CoelloCA. Constraint-handling using an evolutionary multiobjective optimization technique. Civil Engineering Systems. 2000; 17(4): 319–346.
16.
ZhaoJqWangLZengPFanWh. An effective hybrid genetic algorithm with flexible allowance technique for constrained engineering design optimization. Expert Systems with Applications. 2012; 39(5): 6041–6051.
17.
de MeloVVCarosioGLC. Evaluating differential evolution with penalty function to solve constrained engineering problems. Expert Systems with Applications. 2012; 39(9): 7860–7863.
18.
Mezura-MontesECoelloCCVelázquez-ReyesJ. Increasing successful offspring and diversity in differential evolution for engineering design. In Proceedings of the Seventh International Conference on Adaptive Computing in Design and Manufacture (ACDM 2006). 2006. pp. 131–139.
19.
De MeloVVCarosioGL. Investigating multi-view differential evolution for solving constrained engineering design problems. Expert Systems with Applications. 2013; 40(9): 3370–3377.
20.
LongWLiangXHuangYChenY. A hybrid differential evolution augmented Lagrangian method for constrained numerical and engineering optimization. Computer-Aided Design. 2013; 45(12): 1562–1574.
21.
Mezura-MontesEVelázquez-ReyesJCoelloCC. Modified differential evolution for constrained optimization. In 2006 IEEE International Conference on Evolutionary Computation. IEEE; 2006. pp. 25–32.
22.
HuangFzWangLHeQ. An effective co-evolutionary differential evolution for constrained optimization. Applied Mathematics and Computation. 2007; 186(1): 340–356.
23.
WangLLiLp. An effective differential evolution with level comparison for constrained engineering design. Structural and Multidisciplinary Optimization. 2010; 41: 947–963.
24.
LampinenJ. A constraint handling approach for the differential evolution algorithm. In Proceedings of the 2002 Congress on Evolutionary Computation. CEC’02 (Cat. No. 02TH8600). IEEE; Vol. 2. 2002. pp. 1468–1473.
25.
dos Santos CoelhoL. Gaussian quantum-behaved particle swarm optimization approaches for constrained engineering design problems. Expert Systems with Applications. 2010; 37(2): 1676–1683.
26.
LiuHCaiZWangY. Hybridizing particle swarm optimization with differential evolution for constrained numerical and engineering optimization. Applied Soft Computing. 2010; 10(2): 629–640.
27.
ZhangMLuoWWangX. Differential evolution with dynamic stochastic selection for constrained optimization. Information Sciences. 2008; 178(15): 3043–3074.
28.
ShenHZhuYNiuBWuQ. An improved group search optimizer for mechanical design optimization problems. Progress in Natural Science. 2009; 19(1): 91–97.
29.
ZaharaEKaoYT. Hybrid Nelder-Mead simplex search and particle swarm optimization for constrained engineering design problems. Expert Systems with Applications. 2009; 36(2): 3880–3886.
30.
EskandarHSadollahABahreininejadAHamdiM. Water cycle algorithm – A novel metaheuristic optimization method for solving constrained engineering optimization problems. Computers & Structures. 2012; 110: 151–166.
31.
RayTSainiP. Engineering design optimization using a swarm with an intelligent information sharing among individuals. Engineering Optimization. 2001; 33(6): 735–748.
32.
BelegunduAD. A study of mathematical programming methods for structural optimization, Department of Civil and Environmental Engineering. 1982; 724.
33.
Coello CoelloCABecerraRL. Efficient evolutionary optimization through the use of a cultural algorithm. Engineering Optimization. 2004; 36(2): 219–236.
34.
KarabogaDBasturkB. Artificial bee colony (ABC) optimization algorithm for solving constrained optimization problems. In International Fuzzy Systems Association World Congress. Springer; 2007. pp. 789–798.
35.
BrajevicITubaMSuboticM. Performance of the improved artificial bee colony algorithm on standard engineering constrained problems. Int J Math Comput Simul. 2011; 5(2): 135–143.
36.
WangYCaiZZhouYFanZ. Constrained optimization based on hybrid evolutionary algorithm and adaptive constraint-handling technique. Structural and Multidisciplinary Optimization. 2009; 37: 395–413.
37.
GauravKKumarASinghR. Single and multiple odor source localization using hybrid nature-inspired algorithm. Sādhanā. 2020; 45: 1–19.
38.
AbdollahiMIsazadehAAbdollahiD. Solving the constrained nonlinear optimization based on imperialist competitive algorithm. Int J Nonlinear Sci. 2013; 15: 212–219.
39.
AbdollahiMIsazadehAAbdollahiD. Imperialist competitive algorithm for solving systems of nonlinear equations. Computers & Mathematics with Applications. 2013; 65(12): 1894–1908.
40.
MajdAAbdollahiMSahebiGAbdollahiDDaneshtalabMPlosilaJ, et al. Multi-population parallel imperialist competitive algorithm for solving systems of nonlinear equations. In 2016 International Conference on High Performance Computing & Simulation (HPCS). IEEE; 2016. pp. 767–775.
41.
AkhtarSTaiKRayT. A socio-behavioural simulation model for engineering design optimization. Engineering Optimization. 2002; 34(4): 341–354.
42.
GandomiAHYangXSAlaviAH. Cuckoo search algorithm: A metaheuristic approach to solve structural optimization problems. Engineering with Computers. 2013; 29: 17–35.
43.
KashanAH. An efficient algorithm for constrained global optimization and application to mechanical engineering design: League championship algorithm (LCA). Computer-Aided Design. 2011; 43(12): 1769–1792.
44.
dos Santos CoelhoLMarianiVC. Use of chaotic sequences in a biologically inspired algorithm for engineering design optimization. Expert Systems with Applications. 2008; 34(3): 1905–1913.
45.
WangYCaiZZhouY. Accelerating adaptive trade-off model using shrinking space technique for constrained evolutionary optimization. International Journal for Numerical Methods in Engineering. 2009; 77(11): 1501–1534.
46.
MahdaviMFesangharyMDamangirE. An improved harmony search algorithm for solving optimization problems. Applied Mathematics and Computation. 2007; 188(2): 1567–1579.
47.
YıldızBSKumarSPholdeeNBureeratSSaitSMYildizAR. A new chaotic Lévy flight distribution optimization algorithm for solving constrained engineering problems. Expert Systems. 2022; 39(8): e12992.
48.
LiuLKhisheMMohammadiMMohammedAH. Optimization of constraint engineering problems using robust universal learning chimp optimization. Advanced Engineering Informatics. 2022; 53: 101636.
49.
PereiraJLJOliverGAFranciscoMBCunhaSS JrGomesGF. Multi-objective lichtenberg algorithm: A hybrid physics-based meta-heuristic for solving engineering problems. Expert Systems with Applications. 2022; 187: 115939.
AbdollahiMGaoXMeiYGhoshSLiJ. An ontology-based two-stage approach to medical text classification with feature selection by particle swarm optimisation. In 2019 IEEE Congress on Evolutionary Computation (CEC). IEEE; 2019. pp. 119–126.
52.
AbdollahiMGaoXMeiYGhoshSLiJ. Stratifying risk of coronary artery disease using discriminative knowledge-guided medical concept pairings from clinical notes. In PRICAI 2019: Trends in Artificial Intelligence: 16th Pacific Rim International Conference on Artificial Intelligence, Cuvu, Yanuca Island, Fiji, August 26–30, 2019, Proceedings, Part III 16. Springer; 2019. pp. 457–473.
53.
AbdollahiM. Improving Medical Document Classification via Feature Engineering. Open Access Te Herenga Waka-Victoria University of Wellington. 2024.
54.
AbdollahiMLotfiSAbdollahiD. Solving systems of nonlinear equations using the cuckoo optimization algorithm. In The 3rd International conference on The Contemporary Issues in Computer Sciences and Information Technology (CICIS). Vol. 3. 2012. pp. 191–194.
55.
AroraJS. Introduction to optimum design. Elsevier. 2004.
56.
KannanBKramerSN. An augmented Lagrange multiplier based method for mixed integer discrete continuous optimization and its applications to mechanical design. 1994.