
Abstract
Ferroelectric materials have been used in numerous applications as ultrasonic and sonar transducers etc. due to their distinct ferroelectric and piezoelectric properties. Their characteristic loops measured from experiment demonstrate generally nonlinear hysteresis, and the hysteresis is also easily to be deteriorated to offset or asymmetry by some inevitable reasons like electric fatigue. The aforementioned complexities aggravate the modeling difficulty and no doubt impede the utilization potentiality of ferroelectric materials. In view of this, the paper is set out to present an appropriate model that can comprehensively describe a wide class of characteristic loops in consideration the deteriorated circumstance aroused by fatigue factor. Finally experimental data is utilized here for validating the superiority of the proposed method to conventional one.
Keywords
Introduction
Some smart materials like ferroelectric materials usually possess several field-coupling properties as ferro- and piezo-electricity [1–3], which are usually expressed by electric-field-induced polarization (P–E) or electric-field-induced displacement (D–E) and electric-field-induced strain (ϵ–E) loops. Under harmonic field, these measured loops demonstrate representative nonlinear-hysteretic characteristics that should be theoretical symmetric if domain switching and reverse process was idealized. However, ferroelectric materials are likely to lose partial its ability of switchable polarization resulting in their deterioration. This phenomenon could be mainly attributed to electric fatigue, which is a primary obstacle to the full commercialization of ferroelectric materials and their devices.
Up to date, many proposed models have been used to describe these ferro- and piezo-electric behaviors. One category [4] of the models is obtained by microcosmic perspective that are suitable exploring fundamental material behavior rather than for device design. Another category [4] is macroscopic models that focus on phenomenological descriptions of material behaviors. The latter are arguably the better tools for designing devices featuring ferroelectric materials. But both them still need to be improved because they are not flexible enough to suit for the asymmetric circumstance. With regard to the asymmetric modeling for fatigue, it has remained elusive until now. Some fatigue models have been developed through analyzing the dependence of polarization deterioration on the number of electrical cycles. They can be used to theoretically describe the interfered P–E (D–E) and ϵ–E loops by electric fatigue. Herein it is worth mentioning that most relevant models are inevitably involving sets of unknown or inexplicit coefficients. To evaluate these coefficients is very pivotal before they are substituted into the model, which directly determines whether the model is effective and accurate. So far these coefficients are evaluated by experimental measurement or even just empirical means. These test results are, in realities, often susceptible to some uncertain factors aroused by restricted experimental conditions [5]. Thus models substituted by these evaluations may not be effective for describing the specific characteristic behavior in ferroelectrics.
For such cases, it is especially significant to have a fatigue comprehensive model and calibration methods that can rightly reproduce those ferro- and piezo-electric responses. The related work is carried out as follows.
Comprehensive model considering fatigue
Comprehensive equations
Being different from the constitutive relation of piezoelectric materials, ferroelectric materials possess domain switching to arouse two more extra variables as remanent strain
The remanent strain
As soon as substituting Eq. (3) into Eq. (2), we found the output variables (D
i
and ϵ
ij
) are basically dependent on the intermediate variable
Firstly, a hyperbolic tangent function is utilized to fit this saturated polarization
In real experiment, the behavior of circuits experiencing arbitrary initial conditions cannot be precisely predicted due to incomplete switching. Thus, minor (un-saturated) polarizations would be witnessed more commonly, which are basically surrounded within the saturated loop. On that basis, it is assumed that the derivative of
As mentioned before, the induced polarization has been proved demonstrating deterioration of hysteresis responses by some defects such as point defects and space charges [8]. On account of structural damage caused by point defect, Yoo found the reduction rate of actual polarization is proportional to the original polarization along with the increasing of the cycle number of fluctuant electric field. On the other hand, Verdier found the change of center of the polarization hysteresis response shows an approximately linear dependence on the logarithm of the electric cycle number. Based on the relation of fatigue polarization with cycle number of electric field, the current (fatigue) polarization
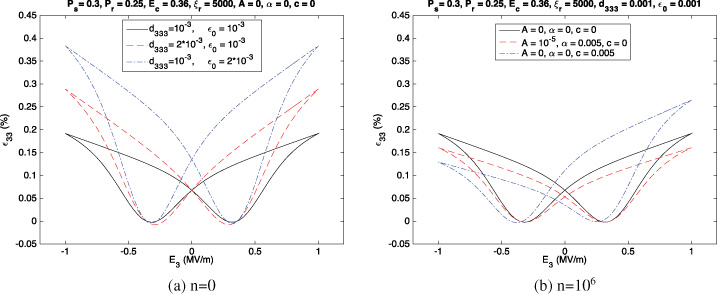
Through observation, this model inevitably involves multiple parameters that affect the hysteretic response by means of different shape loops under specific condition (amplitude, frequency or cyclic number of electric field). It is important to delineate their influences on the overall behavior, and, if possible, reveal their physical/macroscopic meaning in case they do not initially admit a direct interpretation. To this end, we carry out a numerical experiment here, and set the material properties to P s = 0.3 C/m2, P r = 0.25 C/m2, E c = 0.36 MV/m, 𝜉 r = 5000, d 333 = 10−3 m/MV, ϵ0 = 0.001, A = 10−5, 𝛼 = 0.05, c = 0.005. We then apply a harmonic electric field to the material with amplitude 1 MV/m and frequency 0.2 Hz, by substituting it into comprehensive model. We then integrate these coupled differential equations using a standard fourth-order Runge–Kutta method, and obtain electric-field-induced electric displacement and induced strain loops subsequently. The following observations can be made from the obtained results:
First of all, parameters P s , P r and E c are defined in the saturated dipole polarization curve P sat , which are all taken as positive quantities, and named as saturated polarization, remanent polarization and coercive field. Parameter ϵ r is a dielectric constant that affects the slope of the linear fit of D–E loop correspondent to P r –E loop in large-field range.
Parameters analysis in the comprehensive model.
Without considering fatigue (n = 0), we found piezoelectric coefficient d 333 is proportional to the slope of the ϵ–E loop at zero field point (see Fig. 1(a)). Likewise, saturated strain ϵ0 is proportional to the average value of the ϵ33 at the whole range. Parameters d 333 and ϵ0, generally speaking, reflect piezoelectric capability of the materials. With considering fatigue (n = 106) the primary indication is the decrease of P r accompanied by a change in E c , which directly induces the deformation of ϵ–E loop. A decrease in the electric–induced strain is witnessed to make the loop more flat (by comparison of Fig. 1(a) with Fig. 1(b)). Then parameters A and 𝛼 demonstrate the inactive polarization caused by point defect, which make the electric-induced strain loop more compressed. Furthermore as parameter c increases (while space charge positive i.e., q = 1), it is seen that ϵ33 becomes asymmetric with a decreasing of strain range. The left wing of the butterfly loop degrades more rapidly than the right as result of electric fatigue. Meanwhile, the loop center exhibits a shift to the left. These phenomena have been observed in experiments [9]. Based on the preceding description about parameters in the model, they are organized and explained altogether in Table 1.
Characteristic parameters in fatigue comprehensive model
As shown in Table 1, characteristic parameters have different certain physical meaning, whose evaluations would determine the effectiveness of the model. Thus, we design a GA procedure to optimize the values of these parameters so as to enhance and guarantee the real practicability of the model. It is introduced as follows.
GAs are heuristic optimization methods that imitate the process of natural selection. A generic GA consists of several basic working parts including chromosome representation, fitness function, genetic operators, and termination criteria. Based on the problem we will resolve, the GA is designed as such way:
(1) Chromosome structure
There are nine variables to be identified in Table 1. Thus the chromosome structure becomes
(2) Fitness function
A fitness function measures the status of one chromosome achieving the pre-set objective. Each chromosome needs to be awarded an evaluation that indicates how close it came to meeting the objective. Here, we define the fitness function (“Fit”) by using the Root-Mean-Square Error (RMSE) between the simulated and experimental values, which are:
In addition to the above settings, the rest of the main parameters in GA are also designed as: roulette wheel selection, crossover rate is 0.85 and mutation rate is 0.01, and maximum number of iteration is 50. As soon as the GA procedure is used in the model, the whole fatigue-comprehensive-model method is formed consequently and its flowchart is illustrated in Fig. 2.
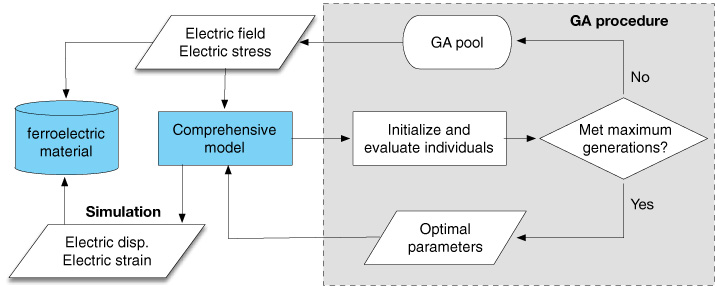
Flow chart of proposed model method by using GA parameter identification.
Next through numerical simulation for experimental data by using such GA method, those parameters will be optimized or assigned certain values according to specific condition including amplitude, frequency and cyclic number of electric field. Finally, we will use curve-fitting method to establish the relationship of parameters with the aforementioned condition, which is the follow-up study. On the basis, the comprehensive model with identified parameters can be applicable in prediction of ferroelectrics’ characteristic in real engineering.
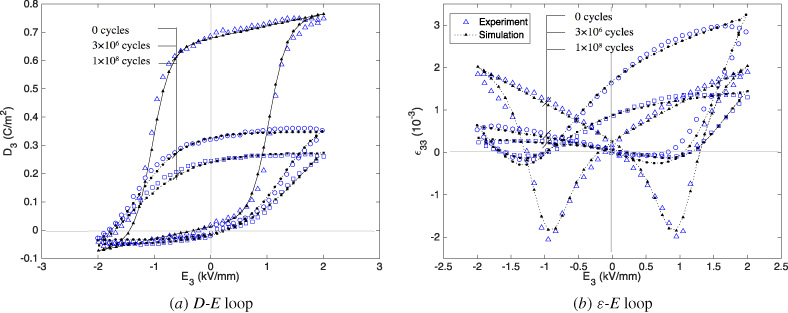
Nuffer [10] has carried out an experiment for investigating fatigue behavior of commercial bulk Lead Zirconate Titanate (PZT) under bipolar cycling. Polarization and strain hysteresis loops were all monitored as well as acoustic emissions (AE). In the experiment, higher cycling field is found yielding stronger fatigue, more incomplete polarization and asymmetric induced strain hysteresis. Here, we use these experimental data to gauge the ability of the proposed model and its GA-based identification procedure in mimicking the D–E and S–E loops, and in extracting the material properties.
As shown in Fig. 3, partial experiment results of strain butterfly loops with solid dots are simulated by the proposed method for three cases 0, 3 × 106 and 108 cycles field whose highest electric field is set as 1.96 kV/mm the optimized parameters and their simulation accuracies (Fit) for these three cases are listed in Table 2. With regard to the case without fatigue, the GA optimized every parameter in the model. Fatigue parameters (A, 𝛼 and c) are fixed by zero in order to optimize the rest parameter more efficiently. On the contrary, the case considering fatigue (i.e. 3 ⋅ 106 and 108 cycles field), the parameters are identified by different certain values, and the fatigue parameters are not zero anymore.
From practicability perspective, GA-based model method is proved genuine applicable That is because the GA procedure can optimize the whole parameters of the model even though some of them are ambiguous, however experimental method can just predict the parameters with explicit meaning like P r and E c . From accuracy perspective, the proposed model method is also testified to achieve satisfactory results. As a example, the proposed method have a less error (9.53%) than Nuffer’s model (24.52%) [10], while electric field fluctuates 3 ⋅ 106 cycles. And for all the cases, the “Fits” of the GA-based model is enough accurate below 10%. Perceptually speaking, the simulated results agree with the experimental data very well no matter of how many cycling number is.
Experimental and simulated loops using proposed model method.
Optimized parameters and simulation accuracy using proposed model method
Footnotes
Acknowledgements
This research is financially supported by the National Natural Science Foundation, People’s Republic of China, grant No. 11502188 and No. 11172226. These supports are gratefully acknowledged.