
Abstract
In this paper an innovative methodology for the conceptual design of hybrid-electric powered aircraft is proposed. The main idea is the optimization of the designed airplane through the negotiation and settling down of the high-level requirements. This optimization problem is multiobjective, as the goal is the minimization of the fuel and maximum takeoff weight, the time reduction of the climb phase and the enhancement of the safety level during takeoff. In order to fulfil these objectives, three Top Level Aircraft Requirements (TLARs) are relaxed. A one more design variable is considered, the hybridization degree, meant as the ratio between the electric power and the total propulsive power. The proposed design and optimization methodology is based on the Fuzzy Logic approach. For each objective function, a fuzzy set is defined. The fuzzy sets fix the boundaries of acceptable resulting objectives included between a minimum and a maximum value. The consideration of all the fuzzy sets identifies the optimal solution, which is characterized by the maximum customer’s satisfaction degree. An Overall Aircraft Design (OAD) environment is set up, in which a deterministic optimizer and fuzzy rules are implemented. The results demonstrate that the optimal solution is achieved by a hybrid airplane. Furthermore, the negotiation of the three requirements entails an improvement of the customer’s satisfaction.
Keywords
Introduction
In automotive and nautical segment, hybrid-electric vehicles are growing in number since the last decades because of many advantages, such as less fuel consumption and reduced environmental pollution [1]. The success and the benefits of the hybrid propulsion systems could be transferred in the aeronautical field, especially in the general aviation that is the aeronautical segment more similar to the automotive one considering the employed technologies and vehicle dimensions. Nevertheless, the adoption of this technology in aeronautics is still at the early stage. Only a few hybrid-powered general aviation aircraft have been designed and produced in the last years for demonstration purposes. Siemens, Diamond Aircraft Industries, and EADS have realized the first aircraft propelled by a hybrid propulsion system, with the aim of demonstrating the feasibility of the hybrid technology in aeronautics [2]. This aircraft, a motor-glider named Diamond DA36 E-Star, is characterized by a propeller powered by an electric motor of 70 kW, which is supplied by both electric energy storage and a small Internal Combustion Engine (ICE) linked to an electric generator. This type of propulsion architecture is named serial hybrid, as the propeller is driven only by an electric motor, which is supplied by an electric generator driven by an ICE operating at a higher efficiency point, assisted by electric accumulators [3]. A second solution is defined by the mechanical coupling via a gearbox or a belt of an ICE and an electric moto-generator, both supplying mechanical power to the propeller during the takeoff and other flight mission phases in which extra-propulsive power is required. This architecture is named parallel hybrid and its potentialities have been proved through a test bench realized by Flight Design [4]. Several other studies have been conducted focusing on this type of architecture, as those reported in [3, 5, 6, 7, 8].
Concerning the two described system configurations, the parallel architecture seems to be the most promising one. From one side, it could assure a reduction of the mission fuel and hence a decrease of the operating costs. Indeed, thanks to this solution, the taxi phase – i.e. the ground movement from the parking to the runway and vice-versa – could be performed electrically, reducing to zero the emissions and decreasing the noise pollution. Moreover for parallel hybrid, the ICE might be sized and optimized (i.e. higher efficiency) for the cruise segment, since the extra-propulsive power required during the takeoff is provided by means of the electrical machine. From the other side, the parallel architecture entails an increment of the safety level during the first part of climb soon after the takeoff. In case of thermal engine failure, the electric motor can supply for a short time a minimum amount of power, enough to smooth the flight descent and attempt an emergency landing. A last advantageous functionality of the parallel hybrid architecture is represented by the use of the propeller as a Ram Air Turbine (RAT) during the descent phase. In this way, energy could be recovered charging the batteries in perspective of a future employment of the electric power for propulsion.
As every aircraft subsystem, the hybrid propulsion system deeply influences the entire aircraft, in terms of mass, fuel consumption, position of the gravity centre, costs and other (e.g. volumes, aerodynamics and safety). The installation of new components, like the mechanical transmission, a more powerful electric moto-generator, and the batteries, could bring to an increment of the propulsive system, even considering a weight reduction of the ICE consequently to its downsize. This is the weak point of this innovative technology, i.e. the mass increment of the system due to the lower energy/weight ratio of the electric accumulators compared to the aviation gasoline. Nevertheless, because of the higher efficiency reached by the thermal engine and the electric machine, lower values of specific fuel consumption can be gained, hence achieving fuel savings and a global reduction of the aircraft weight. In this regard, during the development of the hybrid propulsion system, the designer should take into account the effects of the design on the overall aircraft and the so-called “snowball” effect. As an example, the increment of the mass of the propulsion systems should require more fuel stored, which would entail heaviest structures of the airplane, and eventually causing a further increase of the Maximum Take Off Weight (MTOW). Nevertheless, an aircraft with a greater value of MTOW would require more fuel and a heavier propulsion system. At the end, a little increment of the propulsion weight entails a much greater increment of the entire airplane mass. In literature (as instance [3, 6, 8]), the vast majority of hybrid system design methodologies encompasses dynamic models of the main equipment, as ICE, electric moto-generator and batteries. These methodologies are focused on components dynamic behaviour within the entire aircraft dynamic, without posing the attention on other airplane design results, such as masses, wings dimensions and performances. A methodology able to design the main hybrid components and to develop the entire hybrid aircraft in a preliminary design phase is required. Moreover, it is interesting to assess which and how much the Top Level Aircraft Requirements (TLARs) (e.g. range and payload) affect the hybrid system and therefore the entire aircraft. A more desirable airplane could be obtained simply negotiating some requirements with the stakeholders. As instance, relaxing a too strict requirement could entail a more fuel-effective aircraft, without unsatisfying the needs and desires of the customer.
Flow chart of the proposed design and optimization methodology – The proposed methodology is composed of two loops. The inner loop refers to the multidisciplinary design on the airplane. The outer loop aims at optimizing the aircraft. The optimization problem is multiobjective, as the aim is the minimization of the MTOW, the fuel weight and the climb duration and the maximization of the safety level. The optimizer variates the value of part of the TLARs, which in this work are also considered as objective functions. The hybridization degree is another design parameter set by the optimizer, but it does not affect the global satisfaction perceived by the stakeholders.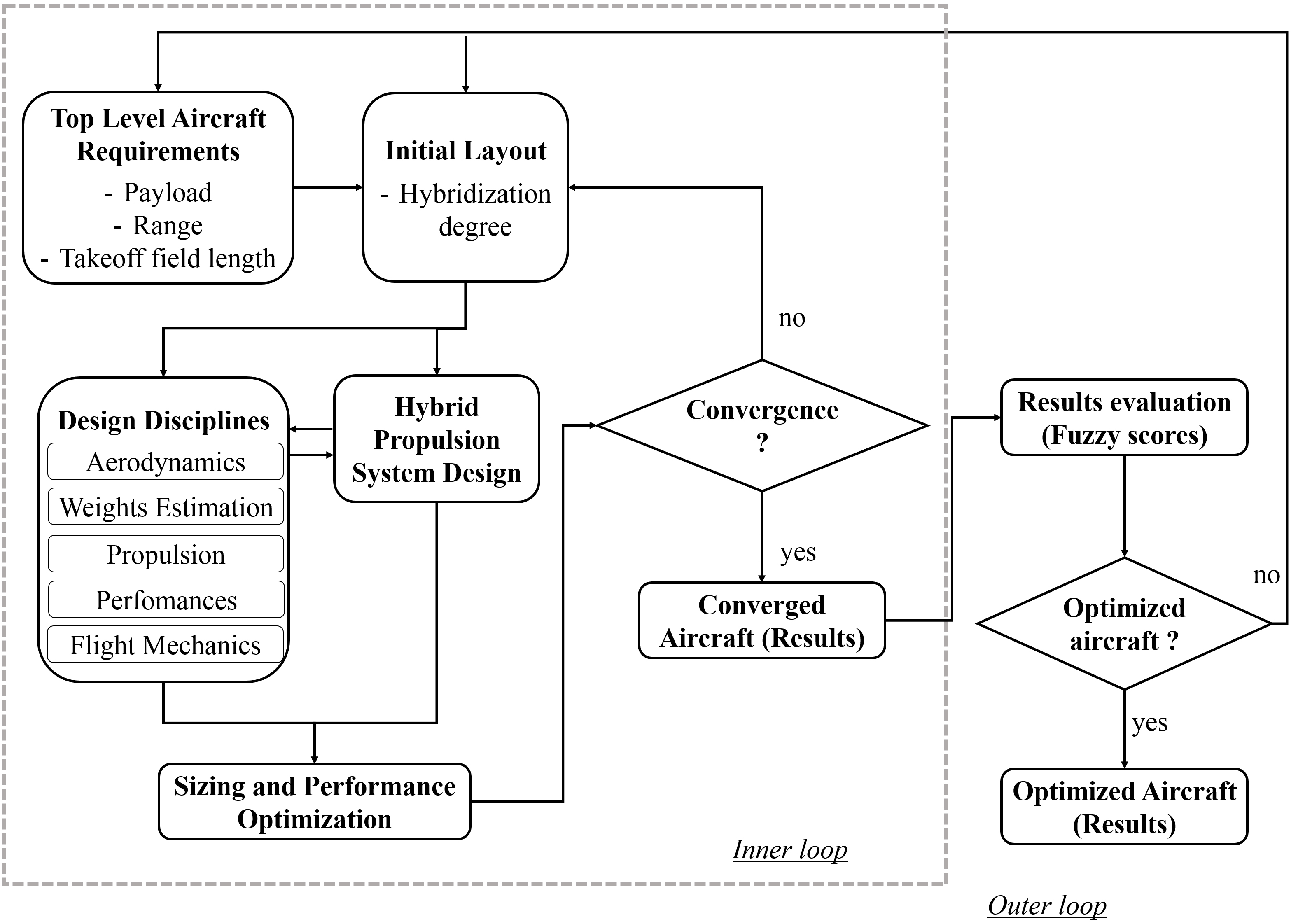
This work aims at proposing an innovative methodology for the overall aircraft preliminary design with focus on the design of the hybrid propulsion system. An adapted version of the Fuzzy Logic methodology is implemented with the aim of optimizing the product design, selecting the most appropriate degree of hybridization – here meant as the ratio of the electric power over the total propulsive power – and relaxing the requirements in the most effective manner.
An overview of the design methodology, with a detailed focus on the optimization part is presented in Section 2. In order to present an application of the proposed methodology, a test case concerning the general aviation aircraft Piper PA-38 Tomahawk is reported in Section 3. The paper ends with recommendations on the proposed methodology.
The flow chart of the proposed methodology for the design and optimization of hybrid-electric propulsion systems is depicted in Fig. 1. The methodology is characterized by an inner design loop and an outer one based on the Fuzzy Logic method. The aim of the inner loop is the design of the entire aircraft without optimization. Hence, starting from the TLARs, as instance payload and range, and some design variables, as the hybridization degree, a feasible design solution is obtained. However, this designed aircraft may be not optimized. In other words, the customer could be persuaded to relax some of the TLARs – e.g. reducing the payload – to achieve, for example, a new and better airplane requiring less fuel during the flight. This optimization is done within the outer loop, in which fuzzy rules are implemented. The fuzzy process aims at improving some objective functions, such as minimizing the MTOW, varying a few design parameters, as the hybridization degree. More details are described in Subsections 2.1 and 2.2.
Design methodology (Inner loop)
The design methodology [9, 10] is comparable to the most renowned design methods found on literature [11, 12, 13]. It starts with the elicitation of the high-level requirements from the stakeholders (the TLARs). The TLARs encompass, as instance, number of passengers, additional payload, range, speed and typical mission profile. From these inputs, an initial layout is sketched, defining preliminary considerations, as wing-fuselage configuration and number, typology and position of engines. Furthermore, in this preliminary module – in case of design of a hybrid airplane – the value of hybridization degree is defined. Soon after the initial layout definition, the multidisciplinary design of aircraft begins. Various disciplines take part in the design of the aircraft, such as aerodynamics, weight estimation, propulsion, performances evaluation and flight mechanics. Most of the disciplinary methods are based on the value of the MTOW, whose an attempt value is initially hypothesized. The design methodology aims at estimating, at first, the aerodynamic characteristics of the airplane, such as the aerodynamic drag that is needed, as instance, for the evaluation of the performances during cruise, the propulsive power. The propulsive power during cruise, which is function of the tentative value of MTOW, allows the estimation of the mission required fuel. Moreover, in the development of a hybrid aircraft, the propulsive power required during cruise sizes the thermal engine. The value of extra-power required during takeoff is an input needed by a dedicated module for the design of hybrid propulsion system, in which methodologies developed at Politecnico di Torino [9] are implemented. In particular, the sizing process is relative to the parallel hybrid architecture, with the aim of estimating the masses of the electrical machine, the batteries and the mechanical transmission. Two innovative features are considered during the proposed design process. The former is the possibility of performing an electric taxi, i.e. a taxi phase in which only the electrical machine generates the propulsive power. The latter is represented by the surplus of propulsive power given by the electric motor during the takeoff phase, in which the power of the downsized ICE is not sufficient alone to perform the manoeuvre. Other results affecting the entire aircraft are assessed, as the value of fuel consumption during cruise, the increment of climb duration due to the downsizing of the thermal engine and the safety level improvement. In particular, concerning this last point, the safety level is evaluated as the difference of safety altitude compared with the conventional architecture. The minimum safety altitude is hereby defined as the minimum altitude at which the ICE failure could occur, but the power generated by the electrical machine is sufficient to smooth the descent towards the departing runway and affording a safe emergency landing. More powerful is the electric motor (and more energy is stored within the batteries), lower is the minimum safety altitude, increasing the difference respect the case of the non-hybrid airplane. Then, a preliminary estimation of the weight of the structures of the airplane (i.e. wings, tail and fuselage) and of the on-board systems is performed, obtaining the so-called Operating Empty Weight (OEW). Adding to this result the fuel weight, the payload and hybrid propulsion system mass, a new value of MTOW is determined. This new value is used in the following iteration. This inner iterative process proceeds until the convergence of the MTOW is reached. In other words, the convergence is assessed when the difference between the resulting values of MTOW of two sequential iterations is below a predetermined threshold.
Optimization methodology (outer loop)
The aim of the outer loop is the optimization of the design obtained from the inner loop. The current design problem is a multiobjective optimization problem. Four objectives are considered in this work: 1) minimize the Fuel Weight (FW); 2) minimize the MTOW; 3) minimize the Duration of the Climb phase (CD), and 4) minimize the Safety Altitude (hence maximizing the difference with the conventional aircraft) (SA). A subset of the TLARs is considered as design parameters that could be negotiated in order to improve the design as perceived by the customer. These parameters are: 1) the flight range (R); 2) the payload weight (PW); 3) the Take Off Field Length (TOFL) and 4) the flight speed (V). In the proposed methodology, these four parameters have been considered also as design objectives, incrementing the number of objective function up to eight. Furthermore, an additional design parameter has been included: the hybridization degree (H). However, differently to the other parameters, the value of the hybridization degree is not an objective of the design, but it contributes to achieve a better, more optimized, airplane.
In the current multiobjective optimization problem, the Fuzzy Logic approach has been adopted among different multiobjective optimization methods because it is considered the most suitable methodology. As instance, the Pareto methods allow to define a set of optimal solutions all mathematically equivalent, without identifying the best one [14]. With a priori methods, it is difficult to define the utility function representing the preference of the designer [15]. Furthermore, there are other two reasons behind this choice. Firstly, this methodology allows the assessment of objectives defined by quantities measured on different scales, as masses and distances. Secondly, all the objectives are ordered following a hierarchy of importance. In other words, the customer could retain an objective function more important than another one. As instance, the objective of increasing the safety level could be seen overriding compared to the fuel weight. Hence, the Fuzzy Logic is based on the concept of fuzzy set, whose definition was introduced for the first time by Zadeh [16]. Given a vector
Piper PA-38 Tomahawk main specifications [20]
Piper PA-38 Tomahawk main specifications [20]
Membership function of the proposed example – The MTOW resulting from the design process should range between ymin
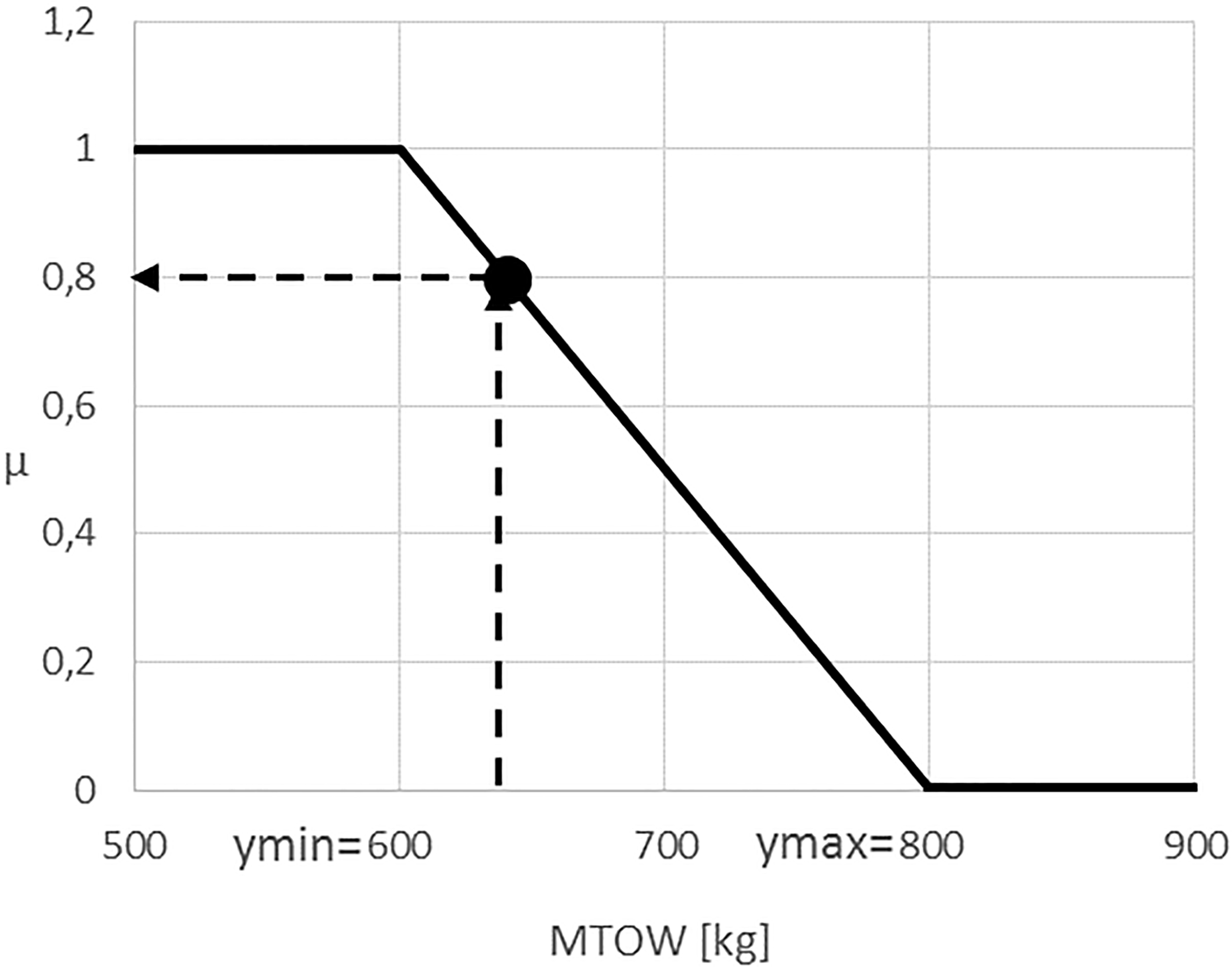
The Fuzzy theory is applied to each objective of the design problem. Hence, a global degree of satisfaction encompassing all the MFs is estimated applying the intersection of the fuzzy sets, as stated in [17, 18]. Given a number
where
The proposed design methodology has been tested developing hybrid versions of a popular general aviation aircraft, the Piper PA 38 Tomahawk, whose main specifications are gathered from [20] and listed in Table 1. The aim of this case study is to verify how much the customer’s requirements could be relaxed obtaining the best solution.
As explained in the previous section, the best solution derives from a multiobjective optimization problem, in which the considered objective functions and relative fuzzy sets are reported in Table 2.
Objective functions and relative fuzzy sets – Eight objective functions are defined. Among these eight objectives, four of them represent fuzzy constraints on the design parameters (i.e. Range, Payolad, TOFL and Flight speed). The optimizer varies the parameters in order to compute the optimal solution. Each objective function ranges from a value ymin characterized by a null fuzzy score to a value ymax, in which the fuzzy score is maximum
Objective functions and relative fuzzy sets – Eight objective functions are defined. Among these eight objectives, four of them represent fuzzy constraints on the design parameters (i.e. Range, Payolad, TOFL and Flight speed). The optimizer varies the parameters in order to compute the optimal solution. Each objective function ranges from a value ymin characterized by a null fuzzy score to a value ymax, in which the fuzzy score is maximum
Furthermore, an additional design variable is considered. It is represented by the degree of hybridization, which could be equal to 0% when a conventional (i.e. non-hybrid) vehicle is considered, or it could assume values greater than zero and up to 40% for hybrid aircraft. No fuzzy set is associated to the degree of hybridization, but it contributes to the determination of the optimal solution.
The optimizer has been started selecting as initial design vector the un-relaxed values of the TLARs and the hybridization degree equal to 0%. This solution represents the conventional aircraft, whose results are reported in the second column of Table 2. For this particular solution, a satisfaction degree of 0.15 has been estimated. Therefore, the optimizer has derived the optimal solution that is the one with the highest global fuzzy score. The resulting specifications of the optimal solution are gathered in the third column of Table 3. The reader can notice the main requirements negotiated, namely the TOFL, the flight speed, the payload and the range. Consequently, some resulting objectives are improved respect the conventional baseline. As instance, the fuel weight is reduced from 82 kg to 62 kg. On the contrary, other objectives are worsen. Other than the relaxed TLARs, which are also considered objective functions, the climb duration is increased of about 50%. Furthermore, the optimal solution is characterized by the installation of a hybrid propulsion system, with a hybridization degree of about 30%. Therefore, the customer’s satisfaction degree of the new solution is more than three times higher namely a solution more appreciated by the stakeholders.
Obtained results – The table shows the specifications of two versions of the Piper PA-38 Tomahawk. The first one refers to the aircraft with a conventional propulsion system and unrelaxed requirements. The latter represents the optimized solution. In this case, the aircraft is power by a hybrid-electric propulsion system with hybridization degree above 30%. In the optimal solution, the requirements are relaxed, but some objectives – e.g. the fuel weight – are optimized. Hence, the customer’s satisfaction degree of the optimized solution is about three times superior than the conventional airplane
Starting from the obtained optimal solution, a second study has been performed. The Design Space near the optimal solution is investigated. The design space is here defined as the set of all the parameters that could be varied by the optimizer during the research of the optimum. These design parameters are the hybridization degree, the TOFL, the payload and the range. This study has been performed with a Design Of Experiments (DOE), which consists in about 30000 aircraft designs characterized by several combinations of design parameters. For each designed solution, a global fuzzy score has been estimated. With the aim of visualizing the variation of the satisfaction degree within the Design Space, the contour lines obtained through the DOE have been depicted. The contour lines represent the solutions characterized by constant degrees of satisfaction. The value of the global degrees affects the colour of these lines. Darker colours represent lower global fuzzy scores, while lighter colours state best solutions. In Fig. 2 are reported the contour lines of the DOE, in which the TOFL and the range are considered constant to those relative to the optimal solution (the ‘X’ mark indicates the optimal solution). In particular, the plot represents a part of the DOE analysis, which contains only 10000 solutions. The range and TOFL values are kept constant, while the payload ranges from 156 kg to 157 kg and the hybridization degree is let varying from 30% to 31%.
Contour lines of the global fuzzy score – Fixed Range and TOFL – The contour lines represent the constant values of satisfaction degrees, on varying payload and hybridization degree. Lighter coloured lines denote higher values, while darker lines are relative to lower satisfaction degrees. The optimal solution is marked by the ‘X’.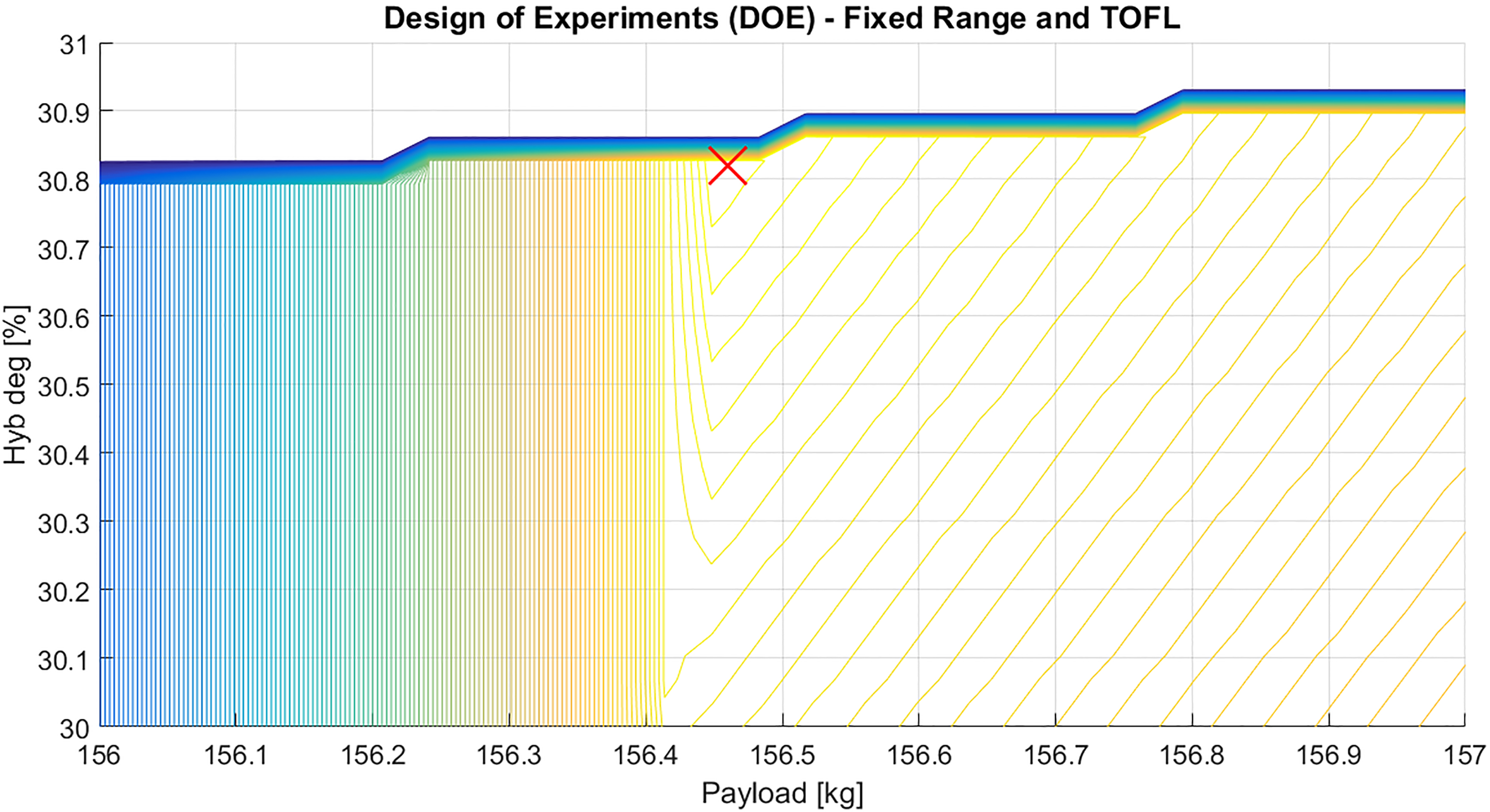
It can be seen from Fig. 3 that the global fuzzy score decreases for high hybridization degrees (i.e. over than 30.8%). High hybridization degrees entail reductions of the ICE power. Due to this downsize, the aircraft have not enough propulsive power to maintain the flight at the cruise altitude with the required speed. Therefore, the flight speed is then reduced to limit the required propulsive power, hence negatively affecting the satisfaction degree. Furthermore, it is worth noting the different orientation of the lines in the Design Space. For values of payload lower than 156 kg, the lines are almost vertical. In fact, in this region, the fuzzy scores of the payload are dominant, i.e. they represent the minimum of Eq. (1). On the right side of the diagram instead, the payload assumes values low different from the requirement. Hence, the contour lines are sloping, as the four objectives are affecting the global fuzzy score. The variation of the colour of the contour lines reveals the area of the Design Space where the optimal solution is located.
This paper presents a methodology based on the Fuzzy Logic to carry out the optimized design of the hybrid-electric aircraft. The obtained results demonstrate that an airplane with a higher customer’s satisfaction could be easily designed lightly negotiating some of the high level requirements. Using the proposed methodology an aircraft with a satisfaction degree about three times greater than a conventional airplane could be obtained. However, the main advantage of Fuzzy Logic methodology applied to aircraft design is the ability to manage the TLAR evaluating the effect on the customer’s satisfaction. This helps the designer to define a more optimized and marketable aircraft automatizing a process that should require a notable effort and knowledge. Moreover, it is proven that the methodology can be applied to innovative project, as the hybrid aircraft, which requires additional design parameters, i.e. the degree of hybridization.
Footnotes
Acknowledgments
This work was carried out within TIVANO research project supported by the Italian Ministry of Education, University and Research [grant number CTN01_00236_256622].