
Abstract
In this study, a palpation sensor system is developed to detect a lump in a soft object. The developed sensor system consists of a contact part using a bearing, two linear sliders and a 3-axis load cell. While the roller type contact part is scanned against a soft object, reaction force applied to the contact part is measured. Lumps are detected by measuring fluctuation of the reaction force. In experiments, the sensor system is scanned against the samples. From the results, it is found that the lump with a small diameter embedded at a deep position.
Introduction
In Japan, the annual incidence rate of breast cancer among women is the highest among all cancers [1]. Besides, breast cancer morbidity and mortality rate are increasing [1,2]. In addition, there are reports that early detection raises 5-year relative survival rate for breast cancer [3]. Therefore, early detection is important. For early detection, medical examination is conducted. The main methods include ultrasonography, mammography, and palpation.
Palpation is a simple diagnosis method that doctors examine body by touch feeling with their hands. The method is widely used because it takes shorter time and costs less than other methods. The information obtained by palpation is the existence of a tumor, its size, its stiffness and the surface condition. However, the diagnosis with palpation is not objective because the palpation sensitivity depends on the experience and skills of the physician. Therefore, a palpation system for measuring tactile information is required.
In previous studies [4,5], a palpation sensor system that detect a lump has been fabricated. The system presses a measurement sample by a contact part using a bearing or a ball roller. Then, while the contact part scans on the measurement sample, reaction force is measured. It was confirmed that reaction force sharply increased when the contact part passed over a lump. However, in previous studies, fluctuation of the reaction force was not observed for a sample with a small lump at deep position. By increasing the pressing depth of the contact part, it was suggested that fluctuation of reaction force becomes large [4], but in the previous research, the pressing depth was limited because of a structural problem of the contact part. Therefore, it is necessary to improve the sensor structure so that the pressing depth of the contact part can be increased.
In this paper, the contact part was developed so that it could be pressed deeply. We investigated the effect of the pressing depth on the detection of lumps using the developed contact part. Then, distribution maps of reaction force were obtained by repeating a scanning. We investigated the features of the distribution map of the reaction force due to the lump.
Roller type palpation sensor system.

Schematic drawing of the palpation sensor system.
Schematic drawing of the developed contact part.

Measurement samples.
Schematic drawing of the measurement sample.
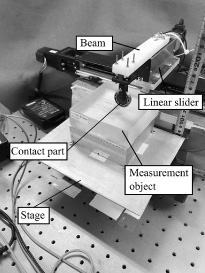
Figure 1 shows the photograph of the developed sensor system and Fig. 2 shows the schematic drawing of the system. The sensor system consists of a contact part using a bearing (6803, NTN Corporation), two linear sliders (ESRM5R021K, ORIENTAL MOTOR Co., Ltd.), a cantilever beam, and a 3-axis load cell (USL06-H5-200N-C, Tec Gihan Co., Ltd.). This load cell can measure force up to 200N.The 3-axis load cell is mounted directly above the contact part and the contact part is mounted at the tip of the beam. The beam is attached to the linear motion slider. While the contact part is scanned on the measurement sample by moving the sliders, reaction force is measured with the load cell.
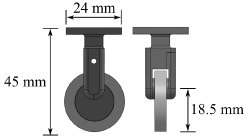
In the previous studies [4,5], when the contact part was pressed deeply into the sample, the frame of the contact part was in contact with the sample. In that state, large resistance force due to contact with the frame of the contact part was applied to the sample during scanning. Therefore, the previous system did not enable to press the sample deeply for scanning, and a lump at deep position could not be detected. In order to detect a lump located deep position, it is necessary to increase the pressing depth. Therefore, as shown in Fig. 3, we designed the contact part to prevent the frame from contacting the sample when pressed deeply. For the contact part, we use a bearing with an inner diameter of 17 mm, an outer diameter of 26 mm, and a width of 5 mm so as to reduce contact force to the measurement sample.
Measurement samples
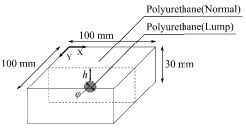
In order to measure reaction force against a soft object including a lump and to investigate the influence of lump properties on the sensor output, nine measurement samples were prepared as shown in Fig. 4. The samples and lumps are made of polyurethane resin. As shown in Fig. 5, shape of the lump is sphere, and the lump is embedded at the center of the sample. The dimension of the sample is 100 mm in width, 100 mm in length and 30 mm in thickness. Then, the embedded depth of the lump from the top surface h is 3 conditions of 5 mm, 10 mm and 15 mm and the diameter of the lump 𝜙 is 3 conditions of 3 mm, 6 mm and 9 mm. Furthermore, young’s modulus of the samples was 4.2 ± 1.2 kPa and that of the lumps was 57 kPa. In this paper, we define the sample name using the embedded depth h and the diameter of the lump 𝜙. For example, h5𝜙3 indicates the sample with the lump of the diameter of 3 mm embedded at 5 mm from the top surface.
Experiments
Two kinds of experiments were conducted using the palpation sensor system with the developed contact part. First, the effect of the pressing depth on the detection of the lump was investigated. Then, distribution maps of reaction force were obtained by repeating a scanning. The obtained results were used to investigated the features of the distribution map of the reaction force due to the lump.
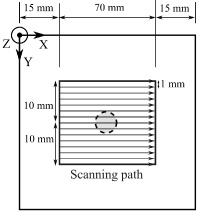
Scanning path for the experiment to investigate the effect of the pressing depth on the detection of a lump.
Scanning path for the experiment to obtain distribution maps of the reaction force.
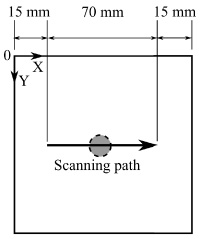
In the experiment, considering the deformation of the sample, three conditions were set for the pressing depth δ, 8 mm, 16 mm and 18 mm. Figure 6 shows the scanning path of the contact part. The start position of the scanning was set 35 mm away from the lump in the X-axis negative direction, and the scanning distance was set to 70 mm. The scanning speed was 10 mm/s, and the sampling frequency was 500 Hz. 5 trials were conducted on each sample.
Distribution maps of the reaction force
Figure 7 shows the scanning path. The start position of the scanning was a position where the contact part was 35 mm away from the center of the lump in the X-axis negative direction and 10 mm in the Y-axis negative direction. The scanning distance was 70 mm in the positive direction of the X-axis, and 60 mm was used for the analysis, excluding 5 mm after the start of the scanning and before the end of the scanning. The contact part was scanned one way in the X-axis direction. And then, it was moved by 1 mm in the positive direction of the Y axis. Furthermore, the scanning was repeated until the contact part was 10 mm away from the center of the lump in the positive direction of the Y axis. The pressing depth was 18 mm, the scanning speed was 10 mm/s and the sampling frequency was 500 Hz.
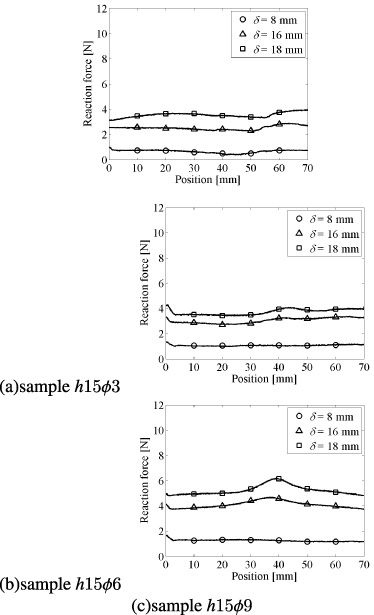
Reaction forces in direction of Z-axis measured by the developed sensor.
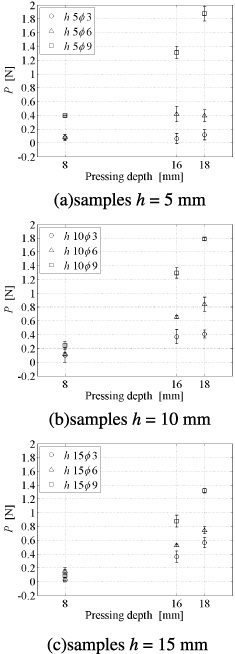
Relationship between parameter P and pressing depth.
The effect of the pressing depth on the detection of the lump
Figure 8 shows the waveform of the reaction force in Z-axis direction of the samples with the lumps embedded at the depth of 15 mm from the surface.
As shown in Figs 8(b) and (c), fluctuation of the reaction force by the lump was confirmed when the pressing depth was 16 mm and 18 mm. Concerning another samples with the lump diameters of 6 mm and 9 mm, the fluctuation of reaction force by the lumps was observed when the pressing depth was 16 mm and 18 mm. And it was also confirmed that fluctuation of the reaction force increased with increase of the pressing depth. On the other hand, it was difficult to observe fluctuation of the reaction force by the lump when the pressing depth was 8 mm, which was the same pressing depth of the previous studies [4,5]. Furthermore, as shown in Fig. 8(a), fluctuation of the reaction force by the lump with the diameter of 3 mm was not observed.
Next, in order to evaluate reaction force fluctuation due to the lump quantitatively, a parameter P to indicate the magnitude of reaction force fluctuation was defined. Before calculation of the parameter, the 20 mm–60 mm section was cut out from the waveform. Then, P was calculated as follows.
Figure 9 shows the value of P for each sample according to the pressing depth. As shown in Fig. 9, it was confirmed that P increased as the pressing depth increased. Furthermore, concerning the lump diameter, the larger the lump diameter, the larger the value of P. However, in the case that the pressing depth was 8 mm, there was not much difference in the value of P except for h5𝜙9.
From the results, it was confirmed that the larger the pressing depth, the larger reaction force fluctuation due the lump. Furthermore, it was suggested that the diameter of the lump can be estimated by magnitude of the fluctuation.
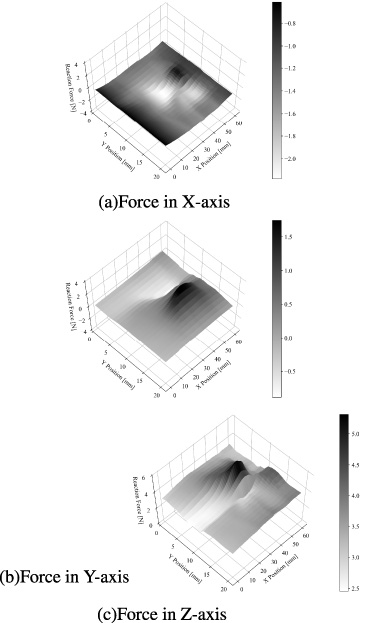
Distribution maps of the reaction force measured by the sensor system (sample h5𝜙9).
Figure 10 shows the distribution maps of the reaction force when the contact part was scanned on h5𝜙9. As shown in Fig. 10(a), in the X-axis direction, increase of the reaction force in the negative direction was measured when passing through the lump.
As shown in Fig. 10(b), in the Y-axis direction, it was observed that the reaction force fluctuated in the negative direction immediately before crossing the lump and fluctuated in the positive direction immediately after that.
As shown in Fig. 10(c), increase of the reaction force due to the lump was observed in the Z-axis direction. Similar reaction force fluctuations in 3-axis direction was obtained for all the samples with the lump diameter of 6 mm and 9 mm.
From the results, it was suggested that extracting these features is useful to detect lumps.
Conclusion
In this study, the contact part of the scanning palpation sensor system using a bearing was developed, and scanning experiments were conducted on the measurement samples embedded lumps. As a result, fluctuation of the reaction force due to the lump increased with increase of the pressing depth, and it was possible to detect the lump with the small diameter at deep position that was difficult to detect in the previous studies. It was also found that the larger the diameter of the lump, the larger the fluctuation of the reaction force due to the lump. Moreover, the sensor system was used to scan the plane with a constant pressing depth. From the results, fluctuations of the reaction force by the lump were observed in the 3-axis direction and it was suggested that extracting these features is useful to detect lumps.
In the future, for practical use, we will construct a handy type sensor palpation system on the basis of the developed sensor system.