
Abstract
In this paper, the nonlinear dynamic characteristics and control of a Galfenol-shape memory alloy (SMA) composite plate under stochastic excitation are studied. New nonlinear differential terms are applied in the constitutive modeling of Galfenol alloy and SMA, and the nonlinear dynamic model of the composite system is developed. The drift coefficient and the diffusion coefficient are calculated to obtain the steady-state probability density function of the system, and finally the optimal control strategy is proposed to improve the effects of vibration reduction. Numerical simulation and experiments results show that the system has abundant nonlinear dynamic characteristics, including stochastic Hopf bifurcation and limit cycle bifurcation. The stochastic optimal control strategy can improve the effects of vibration reduction efficiently. These results are helpful for the application of Galfenol-SMA composite structures.
Introduction
Shape memory alloy (SMA) is a type of smart material which has shape memory effect and super-elastic effect, and is usually used in engineering as damping materials. In many engineering fields, it is not enough that only use SMA to reduce vibration. Thus, the giant magnetostrictive material-shape memory alloy composite structure is proposed. Giant magnetostrictive material (GMM) is another type of smart material. It has giant magnetostrictive coefficient and high response speed, and is usually used in active control. GMM-SMA composite structure combines the advantages of the two materials, and will be a promising composite structure for vibration reduction.
Many researchers have studied GMM and SMA structure. White et al. developed a SMA-Ni composite beam model and compared the predictions of the beam curvature to the experimental data [1]. Lau et al. used a simple theoretical model to estimate the natural frequency of a SMA composite beam before and after actuating the embedded SMA wires [2]. Zbiciak et al. presented a formulation of initial-boundary-value problem for the Bernoulli–Euler beam made of pseudoelastic shape memory alloy [3]. Tiercelin et al. reported the first results concerning the studies on non-linear actuation of cantilevers using giant magneto-strictive thin films in the vicinity of the spin reorientation transition [4]. Jia et al. studied the properties of GMFs at low magnetic fields, including the large magnetostriction, the soft magnetization and the hysteresis [5]. Yang et al. developed a dynamic model of electromagnetic devices constructed with magnetostrictive thin film to study the dynamic characteristics of the system [6]. Dong et al. presented a novel long-type of magnetostrictive and piezoelectric laminate composite design [7]. Chen et al. reported an alternative mechanism for obtaining the converse magnetoelectric [8]. Although many achievements about the dynamic response and control of GMM and SMA structure have been reported, the research results about the nonlinear dynamic characteristics of GMM-SMA composite structure were few.
There are two kinds of giant magnetostrictive materials: Terfenol-D and Galfenol. Compared with Terfenol-D, Galfenol has high compressive strength and tensile strength, which makes it be an ideal material for precision actuators. In this paper, the nonlinear dynamic characteristics and control of Galfenol-SMA composite structures under random excitation are studied. The nonlinear constitutive models of Galfenol and SMA are established, the nonlinear dynamic response of the Galfenol-SMA composite structures under random excitation is analyzed, and finally the control of the composite structures is proposed and verified.
Nonlinear dynamic model of Galfenol-SMA composite plate
The experimental object is a home-made Galfenol-SMA composite plate. Its structure is shown in Fig. 1. It is prepared on a SMA substrate by sputtering a GMM layer. The SMA plate is ordered from Beijing General Research Institute for Nonferrous Metals, and the Galfenol material is ordered from Gansu Tianxin Rare Earth Functional Materials Co., Ltd. The length of the composite plate is 100 cm, and its width is 8 cm. The thickness of SMA layer is 2 mm, and that of Galfenol layer is 0.3 mm. The strain-stress curves of Galfenol and SMA are shown in Figs 2 and 3, which are both supplied by the manufacturers. The strain-stress curves of Galfenol are obtained under compression, and that of SMA are under tension. We can see that SMA has large delay loops, and Galfenol has light hysteresis.
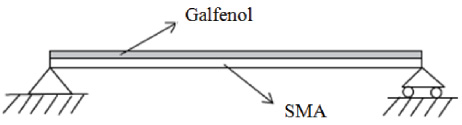
The structure of Galfenol-SMA composite plate.

The Strain-Stress curves of Galfenol.
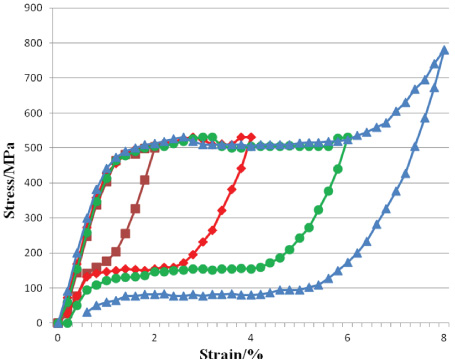
The Strain-Stress curves of SMA.
In this paper, the Van der Pol model is introduced to express the Galfenol alloy’s and SMA’s hysteretic characteristics as follows:
According to the boundary conditions of the four-sided simply-supported plate, the dynamic equation of the Galfenol-SMA composite plate can be solved by Galerkin dispersion as follows:
According to the Hamiltonian theory, Eq. (4) can be shown as follows:
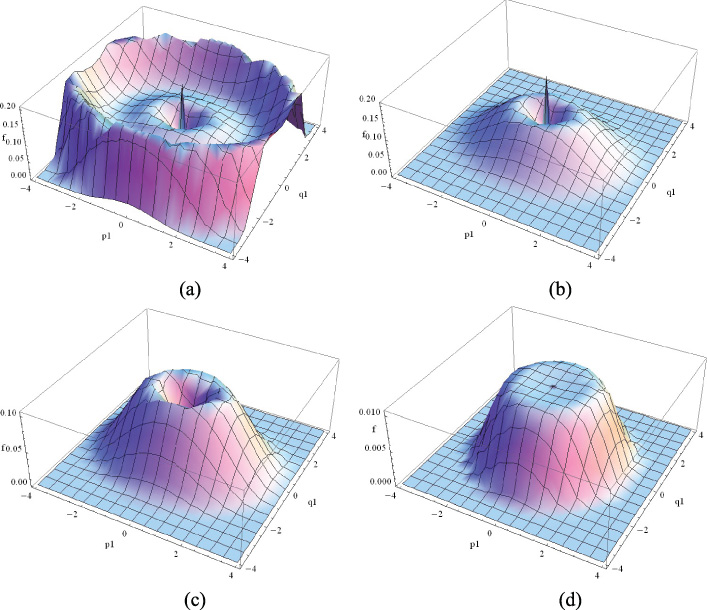
The SPD of the system’s response.
where H is the Hamilton function,
The FPK equation of Eq. (5) is:
The numerical results for the SPD of the system’s response are shown in Fig. 4. C = 0.01, k0 = −0.15, k1 = 5.8, k2 = −4.6, k3 = 1.1, k4 = 0.12, k5 = −0.05 C = 0.01, k0 = −0.15, k1 = 5.8, k2 = −4.6, k3 = 1.1, k4 = 0.12, k5 = −0.08 C = 0.01, k0 = −0.015, k1 = 5.8, k2 = −4.6, k3 = 1.1, k4 = 0.12, k5 = −0.08 C = 0.01, k0 = −0.0015, k1 = 0.05, k2 = −0.05, k3 = 0.05, k4 = 0.05, k5 = −0.05
According to Eq. (9), we find that: When k1 > 0, k2 < 0, k3 > 0, k4 > 0, k5 < 0, the SPD map of the system has a peak and two rings, as shown in Fig. 4(a). The two rings represent two periodic motions with different amplitudes, and the peaks represent the microscopic motion near the origin point (0, 0). When the parameters of the system are changed, the system may jump among the micro-vibration, the small-amplitude periodic motion, and the large periodic motion, and the high-order limit cycle bifurcation will occur; When the parameter k5 increases, the SPD map of the system has one peak and one ring, and the peak value is large. The system makes a slight vibration near original point (0, 0) in the sense of probability, as shown in Fig. 4(b). At this time, with the change of parameters, The system can jump from the micro-vibration to the periodic motion, the stability of the system will change, and the stochastic Hopf bifurcation occurs; when the parameter k0 increases, the SPD map of the system becomes a ring, as shown in Fig. 4(c), the system has periodic motion in the sense of probability; In a special cases just like Fig. 4(d), there is only a platform in the system’s SPD map. The all points in the platform have the similar probability, which means that the system’s motion is random.
To control the system’s vibration actively, the dynamic model of system can be rewritten as follows:
We used the stochastic dynamic programming principle to design the control force. The reliability function R (H, t) of the system can be calculated as follows:
The optimal control force F∗ is as follows:
When F∗ is obtained, the stress σ will be given, and then the required strain of Galfenol rod ϵ required can be calculated. Finally, the controlled magnetic field intensity K control will be obtained since ϵ requied = δ G K control , where δ G is the magnetostrictive coefficient of Galfenol.
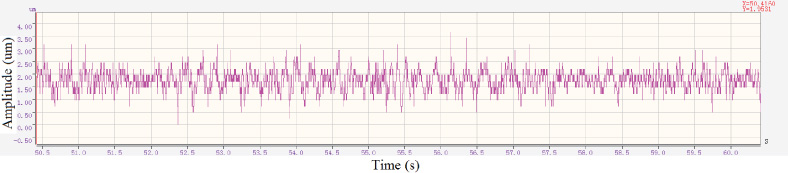
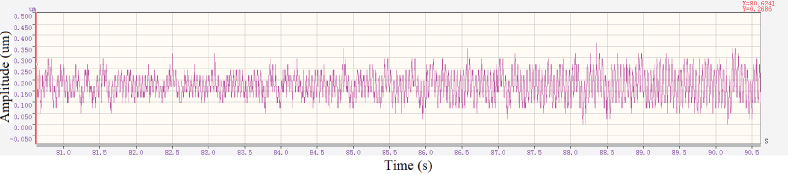
The dynamic response of the uncontrolled system.
The experiment is tested by YE6251 vibration test system produced by SINOCERA PIEZOTRONICS INC, and we observe the amplitude of the middle point in the plate by a motion detector. The stochastic excitation is supplied by a PZT actuator which is jointed with the plate at the middle point. The stochastic signals are set to white noise, and its intensity is 5 μm. The response of uncontrolled system is shown in Figs 5 and 6. We can see that the amplitude of the plate is 2.7 μm, which means that the SMA layer reduce the vibration; the response of controlled system is shown in Figs 7 and 8. We can see that the amplitude of the plate is only 0.34 μm at that time, which means that the Galfenol layer can reduce the vibration effectively under active control.
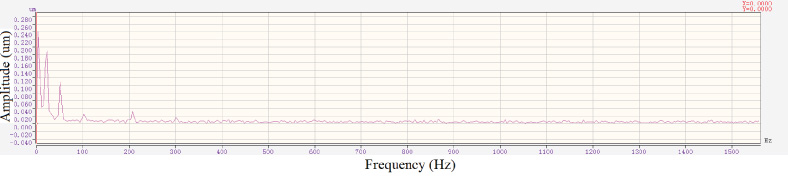
The amplitude-frequency curve of the uncontrolled system.
The dynamic response of the controlled system.
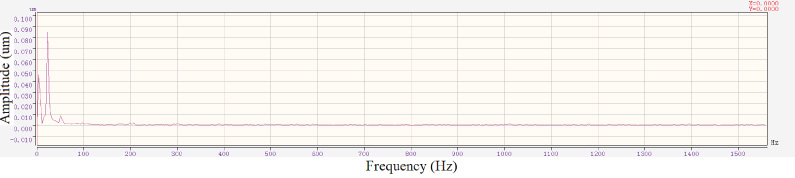
The amplitude-frequency curve of the controlled system.
In this paper, the nonlinear dynamic characteristics and control of Galfenol-SMA composite plate is studied. New nonlinear differential terms are applied in the constitutive modeling of Galfenol alloy and SMA, and the nonlinear dynamic model of the composite system is developed. The ordinary differential equations for the system’s response are obtained by Galerkin method. Then, the drift coefficient and the diffusion coefficient are calculated to obtain the steady-state probability density (SPD) function of the system. Finally, the optimal control strategy is proposed to improve the effects of vibration reduction. The results of numerical simulation and experiment show that the system has abundant dynamic characteristics, including stochastic Hopf bifurcation and limit cycle bifurcation. When the parameters of the system are changed, the system may jump among the micro-vibration near the equilibrium point, the small-amplitude periodic motion, and the large periodic motion. The stochastic optimal control strategy can improve the effects of vibration reduction efficiently. These results are helpful for the application of Galfenol-SMA composite structures in engineering.
Footnotes
Acknowledgements
The authors gratefully acknowledge the support of the Natural Science Foundation of China (NSFC) through Grant Nos. 11872266 and 51875396, the Chinese Aviation Science Foundation through Grant No. 2016ZA48001, Cast-Bisee 511 through Grant Nos. CAST-BISEE2017-006 and CAST-BISEE2019-016.