
Abstract
To solve the problems of the Bouc-Wen model with multi-identification parameters, low accuracy, complex methods, and difficulty in implement, this study proposes a new way for parameter identification of the Bouc-Wen model of the magnetorheological (MR) damper by parameter sensitivity analysis and modified PSO algorithm. The one-at-a-time method (OAT) of local sensitivity analysis is utilized to analyze the unknown parameters in the Bouc-Wen model to complete the model simplification. Then, the modified PSO algorithm is used to identify the parameters of the simplified Bouc-Wen model. Finally, with the relationship between the currents and identified parameters, a Bouc-Wen model for current control is constructed by the curve fitting method. The results confirm that the parameter identification efficiency achieved via the parameter sensitivity analysis is improved by 50% by reducing the parameters of the Bouc-Wen model from 8 to 4. Then, compared with the standard PSO (SPSO) algorithm, the modified one is accurate and stable, and the convergence speed is increased by 17.65% on average. At last, compared with the test data under three different sinusoidal excitations, the model’s accuracy is 89.11%, 92.56%, and 87.45%, respectively. The method proposed in this research can rapidly and accurately identify the Bouc-Wen model and lays a theoretical foundation for applying the MR damper model in vibration control.
Introduction
The magnetorheological (MR) damper, as a kind of intelligent semi-active control unit, has the advantages of simple structure, safety and reliability, high response speed, low energy consumption, and wide adjustable range of damping force [1–3]. It is widely used in vehicle suspension vibration reduction, bridge, housing isolation, aerospace, and other fields [4–7]. It also features fail-safe, which allows the semi-active suspension system to continue working as a passive suspension system when the control system fails. Hence, MR damper is a research hotspot in semi-active vibration control [8]. Due to the strong nonlinear hysteretic properties of the MR damper, it is a big challenge to improve the accuracy of its dynamic model and control [9]. To precisely express the nonlinear hysteretic properties of the MR damper, many scholars have taken much research into the modelling of the MR damper and put forward many restoring force models, including physical model, parametric model, and non-parametric model [10]. Among them, the physical model is also called the pseudo-static model, describes the constitutive characteristics of the MR damper through the relationship between the change of the electromagnetic field in the MR damper and the effect of the MR fluid, which is mainly used for the structural design [11]. The parameterized dynamic model and non-parameterized model need to be combined with experimental data to build the dynamic model. The parameterized dynamic model requires less experimental data, which is a standard modeling method at present.
The existing parameterized dynamic models include the Bingham model [12], the modified Bingham model [13], the modified Dahl model [14], the nonlinear hysteretic double-viscosity model [15], the Sigmoid model [16], the Bouc-wen model [8], the phenomenological model [17] and so on. Non-parameterized models mainly include polynomial model [18], curve fitting model [19], black-box model [20], neural network model [3] and so on. Since the parameterized dynamic model is based on the working mechanism of the MR damper, it is more feasible than the non-parameterized model [21]. Among the parameterized models, the Bouc-Wen model can simulate the nonlinear hysteretic properties of the MR damper more accurately and is simpler than the phenomenon model with fewer parameters. Therefore, the Bouc-Wen model is widely used in researching the dynamic model of MR dampers. Zhu et al. [22] carried out parameter identification for all unknown Bouc-Wen parameters of the MR damper, and verified the model’s accuracy by comparing it with the experimental data.
The Bouc-Wen model contains many unknown parameters. To accurately describe the hysteresis properties, its mathematical model introduces differential equations, exponential terms, and absolute values, which increases the difficulty of parameter identification and the amount of calculation. To control the MR damper more accurately, it is necessary to derive the inverse model from the Bouc-Wen parameterized model, that is, the control model for current or voltage. Too many unknown parameters and complex equations in the Bouc-Wen model make it more difficult. Regarding the problems of the Bouc-Wen model with multi-identification parameters, low identification accuracy, complex identification methods, and difficulty in implementation, researchers in related fields have done a lot of research work on this. Tian et al. [23] put forward an improved simulated annealing algorithm for parameter identification of the Bouc-Wen model, which can improve the efficiency of parameter identification. Hu et al. [24] utilized particle swarm optimization (PSO) and least square method to identify parameters in the Bouc-Wen model, obtained the relationship between parameters and current, thus solving the problem of slow convergence and low accuracy of PSO. Bartkowski et al. [25] adopted a genetic algorithm to identify the parameters of the Bouc-Wen model, and the identified parameter model was in good agreement with the experimental data. Negash et al. [6] proposed a novel genetic algorithm, which improved by changing the crossover and mutation. All parameters in the Bouc-Wen model were identified, and the linear relationship between identification parameters and the current was given. Li et al. [26] used the Simulink Design Optimization toolbox of MATLAB to identify the unknown parameters of the Bouc-Wen model. This method has simple procedures and strong operability. At present, there are many problems in parameter identification of the Bouc-Wen model, such as too many identification parameters, slow convergence speed, and complicated identification process.
To solve these problems, this study takes a parameter identification method based on parameter sensitivity analysis and a modified PSO algorithm. First, the OAT method is used to check the sensitivity of unknown parameters in the Bouc-Wen model, and the model parameters are reduced according to the sensitivity. Second, according to the influence of different parameters on the sensitivity, the Bouc-Wen model is reconstructed, and the parameters are identified by the modified PSO algorithm. Finally, a fitting function between the current and the model parameters is established, and the accuracy and versatility of the model are verified through experiments.
So far, little literature could be found on combining experimental data with sensitivity analysis and modified optimization algorithms in describing the hysteresis properties of the MR damper concerning the applied current. The main technical contribution of this study is as follows: (1) the unknown parameters of the Bouc-Wen model are analyzed by the OAT method of sensitivity analysis, and the parameters with low sensitivity are ignored, thereby simplifying the Bouc-Wen model and reducing the difficulty of the parameter identification; (2) an modified PSO algorithm is put forward to identify the parameters of the simplified Bouc-Wen model, which has the characteristics of faster convergence and higher accuracy than the standard PSO (SPSO) algorithm; and (3) the parameter model of the current controlled MR damper is reconstructed by combining the proposed method with the MR damper dynamics test.
The organization of this study is as follows: Section 2 addresses the Bouc-Wen model and its parameters; Section 3 details the method of the parameter sensitivity analysis and modified PSO algorithm; Section 4 gives the results and analysis of sensitivity analysis and parameter identification; Section 5 verifies the accuracy and universality of the constructed MR damper model. In the last section, a summary of the study is presented.
Bouc-Wen model and its parameters
The Bouc-Wen model proposed by Wen [9] comprises a hysteretic unit, spring element, and viscous damper element in parallel, as shown in Fig. 1. It is widely exploited in depicting the hysteresis properties of MR fluid dampers. It can precisely draw the nonlinear hysteresis properties and is easy to numerically calculate [27].
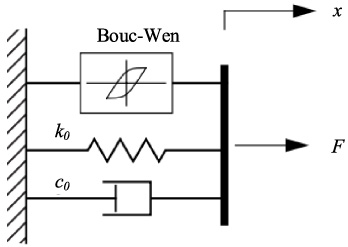
Bouc-Wen model.
Equation (1) is the mathematical expression of the model.
The vector expression of the parameter to be identified is expressed as follows:
It can be seen from Eq. (2) that there is a total of 8 parameters to be identified. It is difficult to identify too many parameters. To ignore the parameters that have minor sensitivity to the model, reduce the difficulty of identification, and improve the efficiency of model parameter identification, a parameter identification method based on parameter sensitivity analysis and a modified PSO algorithm is proposed.
Parameter sensitivity analysis
Sensitivity analysis is a method to study the sensitivity of system output response to system input parameters [28]. Sensitivity analysis is usually divided into two categories: local sensitivity analysis and global sensitivity analysis. Among them, the typically used way of local sensitivity analysis is one-at-a-time (OAT), which only analyzes the influence of a single parameter in the mathematical model on the output response of the model. It has the advantages of simple operation, fast operation speed, and intuitive results [29]. The OAT method is utilized to analyze the parameter sensitivity. Each time, only a single parameter is adjusted within a specific range. Other parameters are fixed to research the influence of a single parameter on the damping force values. The parameters that are not sensitive to the damping force are set to reduce the amount of calculation and uncertainty in parameter identification.
The steps of using the OAT method to analyze the parameter sensitivity of the Bouc-Wen model are as follows:
(i) Set the scope of unknown parameters, and select a set of moderate parameters as the basic values.
(ii) The parameters to be analyzed within a specific range (between the given upper and lower bounds) change in sequence at the center point of the basic value at a specific interval value with the remaining parameters fixed at the basic values.
(iii) Combine the changed parameters and other fixed parameters, respectively, bring these parameters into the model to calculate the result of the damping force, and obtain a set of error values through the error calculation model.
(iv) Sort the sensitivity coefficient of each parameter to find out the sensitivity of the nonlinear hysteretic Bouc-Wen model to this parameter.
The error formula of Bouc-Wen model parameter sensitivity is formulated as follows:
The sensitivity coefficient of the ith parameter is formulated as follows:
According to sensitivity coefficient S i , the sensitivity to each model parameter can be determined. For a parameter of the Bouc-Wen model, the larger the value of S i , the more sensitive the Bouc-Wen model is.
Ground on the SPSO algorithm, a modified PSO algorithm is put forward to determining the parameters of the Bouc-Wen model after sensitivity analysis.
SPSO algorithm
SPSO algorithm is an optimization algorithm imitating the migration and swarming behaviour of bird flock in the foraging process [30]. In the SPSO algorithm, lots of particles move around in a multi-dimensional problem space, searching for the optimal solution according to the position of the individual and group.
In the SPSO algorithm, the velocity and position of the particles are updated as follows.
Since the SPSO algorithm has the problems of slow convergence rate in the later phase and easy to run into local optimal solutions in dealing with large-scale complex optimization problems, a modified PSO algorithm is proposed in this paper, mainly from the aspects of inertia weight, disturbed extremum, and acceleration coefficient.
(1) Inertia weight
Inertia weight is a crucial parameter affecting the SPSO algorithm. In the SPSO algorithm, inertia weight is used to control the influence of past calculation speed and balance the ability of global search and local search to achieve a more appropriate optimization purpose [31–33].
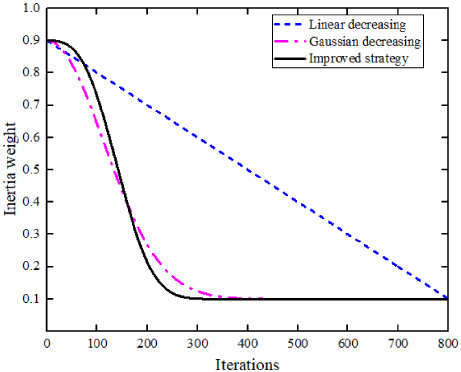
Inertia weight comparison curve.
Based on the decreasing inertia weight adjustment strategy of the Gaussian function [34], the inertia weight function is modified. The cubic exponential function is adopted to make the inertia weight value larger at the initial phase of the search to prolong the global search ability at the initial iteration stage and quickly reach the vicinity of the optimal solution. For the convergence and accuracy of the algorithm, the search speed is reduced rapidly, and the local search ability is enhanced in the later stage of the search.
The modified inertia weight expression is as follows:
As shown in Fig. 2, the curves of Gaussian function decreasing inertia weight, linear decreasing inertia weight, and modified inertia weight with the number of iterations are compared. The inertia weight function of the modified strategy meets the requirements that the inertia weight value at the initial stage of the optimization algorithm iteration is more considerable and the inertia weight value at the later stage of the iteration is smaller. It can converge faster and achieve better results in balancing the global and local search ability of the SPSO algorithm.
(2) Disturbed extremum
Using the above-mentioned nonlinear inertia weighting strategy, the SPSO algorithm converges very quickly in the early stage. If the current optimal solution is a local optimal position, all particles may tend to this position, resulting in the “homogenization” of the particles. It will be difficult for these particles to spring out of the local extremum, resulting in slow evolution and low accuracy in the later phase [35]. To solve this problem, a disturbed extremum operator is introduced. When the particle falls into the local optimal value, an appropriate disturbance is applied to the particle. The particle can regain a certain momentum and learn from the new extreme direction, thereby increasing the probability of finding the global optimal value.
The expression of disturbed extremum operator is as follows:
(3) Acceleration coefficient
In the SPSO algorithm, the values of acceleration coefficients c
1 and c
2 are fixed. To improve the optimization effect and avoid falling into local extremum, the local acceleration coefficient c
1 should decrease with the rise of the number of iterations of the algorithm, and the global acceleration coefficient c
2 increase with the rise of the number of iterations. The expressions of c
1 and c
2 are as follows:
According to Eqs (5)–(8), the modified particle swarm displacement and velocity update equations are:
Dynamic properties test of the MR damper
Taking RD-8040-1 damper produced by Lord company as the research object, the dynamic properties of the MR damper were tested on the damper test bench made by MTS company, as shown in Fig. 3. The voltage and current were regulated by a DC power supply model GPD-2303S produced by Taiwan’s GW Instek Electronics Co., Ltd. The MR fluid damper was connected to the MTS shock absorber test bench through a fixture. The MTS shock absorber test bench applied sinusoidal excitation to the damper through the lower end, and the MTS controller stored the collected force and displacement signals to the PC. The sinusoidal excitation signal was adopted, the amplitude was set to 10 mm, the movement speed of the damper piston rod was 50 mm/s, 100 mm/s, and 200 mm/s (the corresponding frequencies were 0.8 Hz, 1.6 Hz, and 3.2 Hz, respectively), the current values were 0.0 A, 0.2 A, 0.4 A, 0.6 A, 0.8 A, 1.0 A, and 1.2 A, and the sampling frequency was 200 Hz. A total of 21 groups of tests were required.
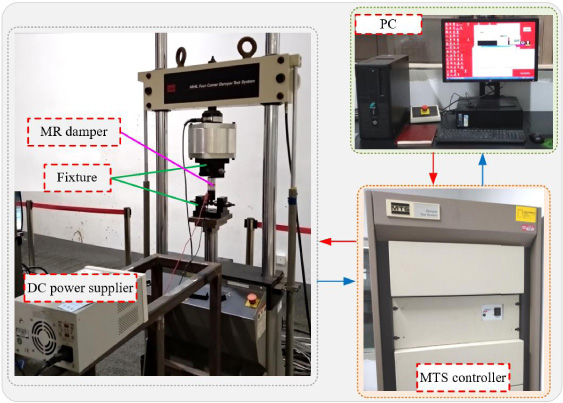
Dynamic tests of the MR damper.
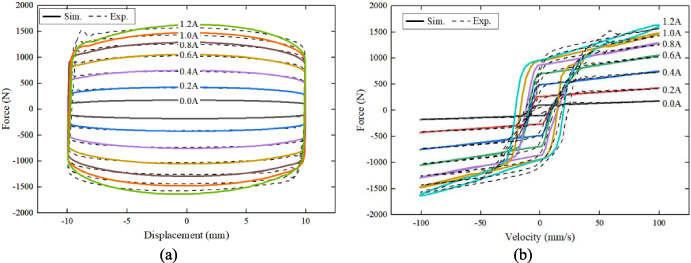
Figure 4 exhibits the measured force-displacement and force-velocity dynamic characteristic curves subjected to sinusoidal displacement excitation with the piston rod speed of 100 mm/s and an amplitude of 10 mm and commanded with currents from 0.0 to 1.2 A. From Fig. 4(a), the size of the rectangular area formed by the damping force under different currents represents the amount of energy dissipated by the MR damper in each working cycle, which increases with the magnitude of the applied current. From Fig. 4(b), the relationship between damping force and speed presents an evident nonlinear hysteresis phenomenon in the pre-yield region. When the moving speed of the piston rod is close to zero, the output damping force of the corresponding MR damper is not zero and shows strong double-viscous hysteresis properties. In the post-yield phase, the damping force has a linear relationship with the velocity, and the damping force becomes more prominent as the current increases. The amplitude of the damping force and the magnitude of the hysteresis loop increase with the rising of the current. When the current exceeds 1.0 A, the damper tends to be saturated.
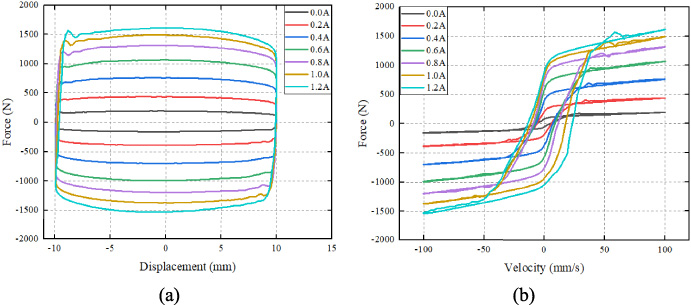
Experimental hysteresis loops under varied currents: (a) Force vs. displacement; (b) Force vs. velocity.
Combined with the theoretical research in literature [5,22,26,36,37] and the above-mentioned MR damper test results, the value range and basic values of 8 parameters in the Bouc-Wen model are given, as shown in Table 1.
Range and basic value of Bouc-Wen model
Range and basic value of Bouc-Wen model
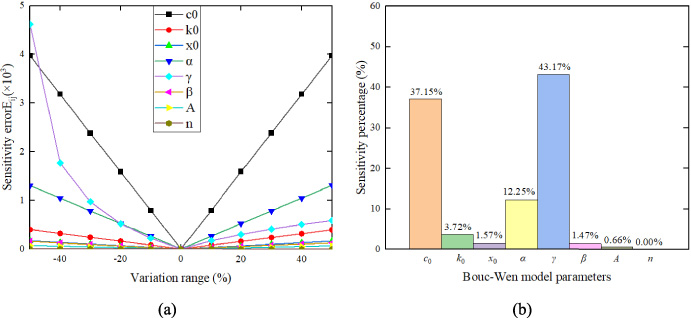
OAT analysis results of Bouc-Wen model parameters: (a) Model parameter sensitivity change curve; (b) Percentage of model parameter sensitivity.
Based on the analysis steps of the OAT method, the eight parameters in the Bouc-Wen model are analyzed, and the MATLAB software is programmed to calculate the sensitivity error changes and the percentage of sensitivity of each parameter, as given in Fig. 5. The Bouc-Wen model has the most extraordinary sensitivity to 𝛾, c 0, 𝛼, and k 0, and its sensitivity percentages are 43.17%, 37.15%, 12.25%, and 3.72%, respectively. The sensitivity of x 0, 𝛽, A, and n is the smallest, all less than 2%, which has little impact on the model’s output and is insensitive to the input values. Hence, these four parameters are fixed at the basic value during the parameter identification process, that is, x 0 = 0 mm, 𝛽 = 1.5 mm−2, A = 80, n = 2.
After sensitivity analysis, the original Bouc-Wen model can be simplified as follows:
Thereby, the number of parameters is reduced to four. Compared with the original one, the model parameters after sensitivity analysis are reduced by half, which reduces the difficulty of parameter identification and the amount of calculation.
Fitness function
For the Bouc-Wen model, there is no unified parameter value to define the parameters in the Bouc-Wen mathematical model. The combination of test and mathematical model calculation is usually used to identify the parameters. The optimization algorithm minimizes the fitness value to optimize the model parameters so that the simulation value is infinitely close to the measured value. The root mean square error (RMSE) is used as the fitness function value, and its mathematical expression is as follows:
The parameter settings of the modified PSO algorithm are shown in Table 2.
Modified PSO algorithm parameter setting
Modified PSO algorithm parameter setting
Based on the above analysis and with the help of MATLAB software, the parameters of Eq. (10) are identified based on the modified PSO algorithm and the SPSO algorithm. The identification results of four unknown parameters were calculated in the Bouc-Wen model subjected to sinusoidal displacement excitation with the piston rod speed of 100 mm/s, and an amplitude of 10 mm, and adjusted currents from 0.0 to 1.2 A. Table 3 lists the average value of the identification results based on five independent runs of the two methods. The comparison between the simulation curve and the experimental one is given in Fig. 6.
Identification results
Identification results
Comparisons between the simplified Bouc-Wen model after sensitivity analysis and experimental data: (a) Force vs. displacement; (b) Force vs. velocity.
It can be seen from Table 3 that after 800 iterations, the modified PSO algorithm has the same fitness value as the SPSO algorithm, indicating that the modified PSO algorithm has the same accuracy and stability as the SPSO algorithm.
It can be seen from Fig. 6 that the Bouc-Wen simplified model of MR damper after sensitivity analysis and parameter identification is in good agreement with the test results, especially in the range of 0.0–1.0 A, which can precisely depict the nonlinear hysteretic properties of the MR damper. With the increase of the MR fluid temperature, magnetic saturation, and test error, there is a certain difference between the simulation data and the test data when the current exceeds 1.0 A.
Figure 7 shows the optimized iterative curve diagram of the modified PSO algorithm and the SPSO algorithm when the amplitude is 10 mm, the movement speed of the damper piston rod is 100 mm/s, and the current is 0.8 A. The modified PSO algorithm shows strong global and local searchability in the initial iteration period, and the fitness value of the first generation can reach a small range. With the increase of iterations, the modified PSO algorithm has the extreme disturbance term, which significantly enhances the ability to spring out of the local optimum. In the later iteration, it can still continuously update the global optimal value, ensure to spring out of the local optimal value, and improve the accuracy of search results. After calculation, the convergence rate of the modified PSO algorithm is increased by 17.65% on average compared with the SPSO algorithm under sinusoidal displacement excitation with the piston rod speed of 100 mm/s and an amplitude of 10 mm and adjusted currents from 0.0 to 1.2 A.
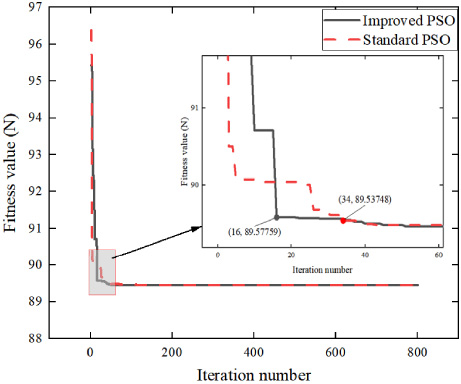
Comparison of the iterative curve between modified PSO algorithm and SPSO algorithm.
According to the relationship between identified parameters and the current in Table 3, the relationship between the four parameters and the current is fitted by the least square method. The results are given in Eq. (12). c
0 is fitted as a quadratic function about current I, k
0 is fitted as an exponential function about current I, 𝛼 is fitted as a cubic polynomial function concerning current I and 𝛾 is fitted as a Gaussian function of current I. The fitting curves of the four identified parameters with the current are shown in Fig. 8.
The fitting effects of c 0, k 0, 𝛼, and 𝛾 are shown in Table 4. Among them, SSE is the sum of squared errors. The closer it is to 0, the better the curve fitting effect is. R-square is the complex correlation coefficient. The closer it is to 1, the better the curve fitting effect is. Adjusted R-square is the square of the residual after adjusting the degrees of freedom. The closer the value is to 1, the better the curve fitting effect is. RMSE is the root mean square error. From Table 4 can be seen that the fitting functions of c 0, k 0, 𝛼, and 𝛾 with current I have achieved a good fitting effect and meet the accuracy requirements of the function calculation.
Combining Eqs (12) and (10) to construct the Bouc-Wen model expression of the output damping force of the MR damper concerning current control is expressed as follows:
Comparing the models corresponding to Eqs (13) and (10), the simulation results are given in Fig. 9. It provides that the Bouc-Wen model formed by fitting c 0, k 0, 𝛼, and 𝛾 with the current I overlap entirely with the simplified model. The accuracy of parameter fitting is further verified.
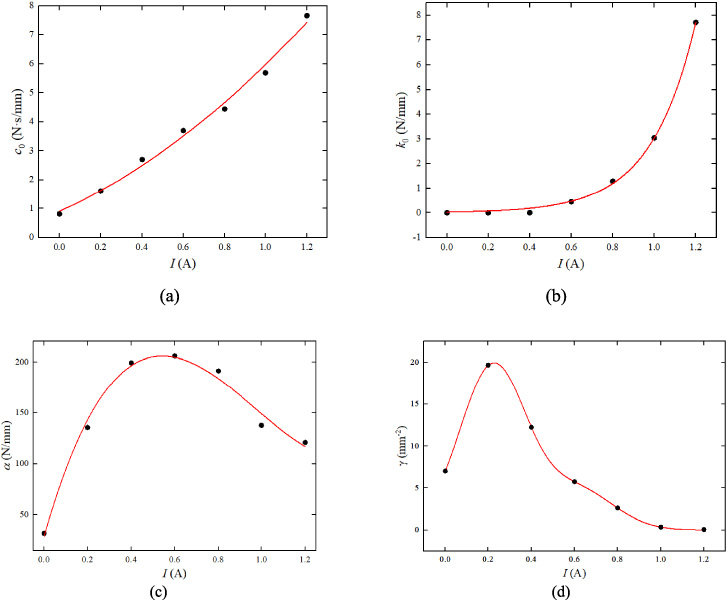
Relation between identification parameters of simplified Bouc-Wen model and current: (a) c 0 vs. I; (b) k 0 vs. I; (c) 𝛼 vs. I; (d) 𝛾 vs. I.
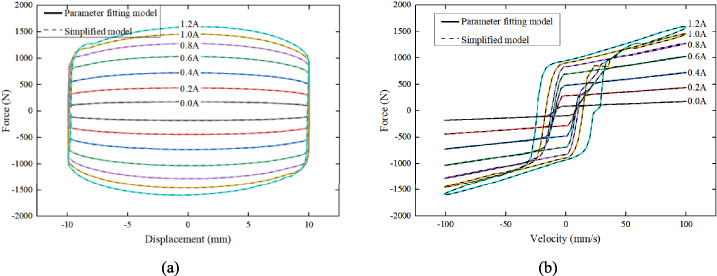
Comparisons between the simplified Bouc-Wen model after sensitivity analysis and experimental data: (a) Force vs. displacement; (b) Force vs. velocity.
Fitting effect of identification parameters and current
To further verify the accuracy and generality of the MR damper model, Eq. (13) is compared with the experimental data under different sinusoidal excitation, and Eq. (14) is used to valuate the accuracy of the model.
According to Eqs (13) and (14), and under the three excitation conditions of 50 mm/s, 100 mm/s, and 200 mm/s, it can be calculated that the Bouc-Wen model’s accuracy is 89.11%, 92.56%, and 87.45%, respectively.
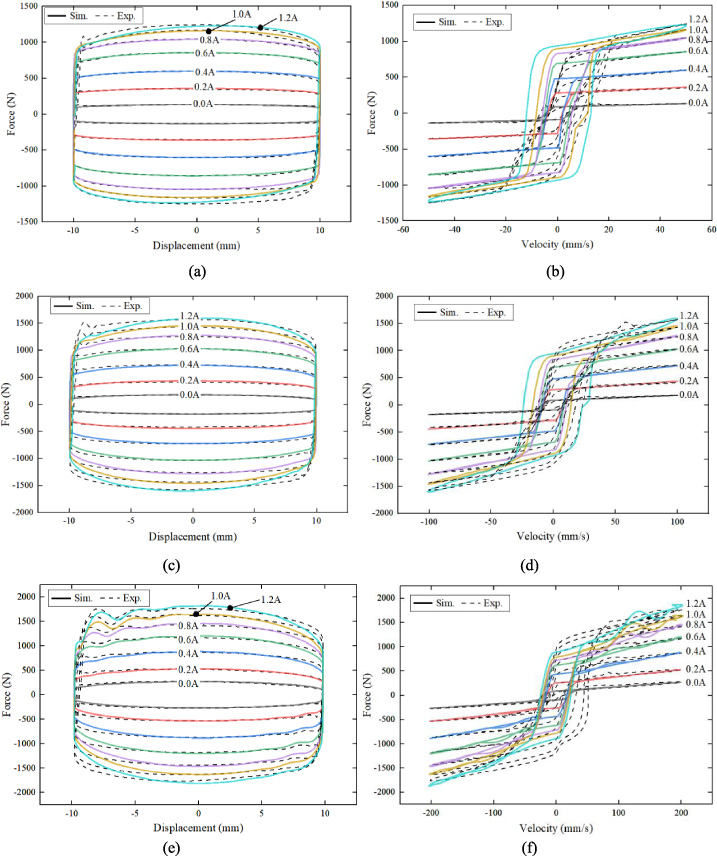
Comparison between the simulated Bouc-Wen simplified model with current and experimental data: (a) Force vs. displacement at 50 mm/s; (b) Force vs. velocity at 50 mm/s; (c) Force vs. displacement at 100 mm/s; (d) Force vs. velocity at 100 mm/s; (e) Force vs. displacement at 200 mm/s; (f) Force vs. velocity at 200 mm/s.
Figure 10 shows the dynamic properties of the constructed MR damper model with different current values and the comparison with the experimental data with the movement speed of the damper piston rod at 50 mm/s, 100 mm/s, and 200 mm/s, respectively. The dynamic properties of the MR damper model constructed based on the method proposed in this study are basically consistent with the experimental data. Especially in the range of current value of 0.0–1.0 A, the model can not only accurately describe the linear relationship between force and speed of MR damper at high speed, but also accurately describe the nonlinear hysteretic relationship between force and speed at low speed.
The MR damper model constructed through sensitivity analysis, modified PSO algorithm optimization, and parameter fitting can accurately simulate the damping properties of different currents and different piston rod motion speeds, which also verifies the accuracy and versatility of the model.
(1) The OAT method is utilized to analyze the sensitivity of the Bouc-Wen model of the MR damper, and the parameters with minor damping force sensitivity are filtered out so that the model is shortened from 8 to 4, which reduces the parameters of the Bouc-Wen model and improves parameter identification efficiency.
(2) After sensitivity analysis, the modified PSO algorithm has an average increase of 17.65% compared with the SPSO algorithm. It has the same accuracy as the SPSO algorithm.
(3) Different fitting functions are used to fit the identification parameters and current, and the parameter model of the current controlled MR damper is constructed. Compared with the experimental data excited by three different piston rod speeds (50 mm/s, 100 mm/s, and 200 mm/s), the accuracy is 89.11%, 92.56%, and 87.45%, respectively. The dynamic characteristic curve of the model is in basically agree with the experimental data. It can accurately simulate the nonlinear hysteretic properties of the MR damper and verify the accuracy and versatility of the model.
(4) The parameter identification method of the MR damper based on parameter sensitivity analysis and modified PSO algorithm reduces the difficulty of model identification and improves the efficiency of parameter identification. The reconstructed MR damper model with current control lays a theoretical foundation for further research on the application of MR dampers in vibration control.
Footnotes
Acknowledgements
This work was supported by the National Key R&D Program of China (No. 2017YFD070020402), State Key Laboratory of Power System of Tractor of China (No. SKT202100X) and the Science and Technology Project in Henan Province of China (No. 212102210328). All the authors would like to thank the above-mentioned funds for providing office, equipment, and materials to this project.
Conflicts of interest
The authors declare that there is no conflict of interest regarding the publication of this paper.
Funding statement
This research was supported by the National Key R&D Program of China (No. 2017YFD070020402), State Key Laboratory of Power System of Tractor of China (No. SKT202100X) and the Science and Technology Project in Henan Province of China (No. 212102210328).
Data availability
The data used to support the findings of this study are available from the corresponding author upon request.
Nomenclature
Subscripts and superscripts
Greek symbols
Latin symbols