
Abstract
Skewed slots are widely used in many industrial applications because they can effectively reduce electromagnetic vibration and noise. In order to eliminate axial electromagnetic force in ordinary skewed slots rotor, a double skewed slot was proposed, which can useful reduce axial electromagnetic force and is superior to traditional skewed slots on reducing the electromagnetic vibration and noise. However, it still suffers from the problem of the difficult manufacturing process in large-sized submersible motors. In this paper, a radial skewed slot to reduce the electromagnetic vibration and noise is proposed, which has the advantages of a simple manufacturing process and obvious effect about reducing noise. Large-sized submersible motors are noisier than ordinary motors but lack effective means to reduce electromagnetic vibration and noise. So this paper adopts 2-D FFT and multi-physics coupling analysis method to analyze and compare the performances of the straight slot and the radial skewed slot in large-sized submersible motors.
Introduction
At present, the electromagnetic vibration and noise of motor are paid more and more attention. In order to reduce the electromagnetic vibration and noise, it is the most common method to use the rotor along with the axial skewed slot in the squirrel cage induction motor [1]. And the electromagnetic vibration and noise are mainly related to the radial electromagnetic force, and the radial electromagnetic force is closely related to the harmonics in the electromagnetic field, including the magnetic potential harmonics generated by the stator winding and rotor winding, and the magnetic permeability harmonics generated by the slot opening [2]. When the frequency and vibration mode of radial electromagnetic force is close to the natural frequency and mode of motor, it will cause electromagnetic vibration and noise [3]. But there is still existing the problem of axial shifting in the axial skewed slot [4]. In order to solve the problem of axial shifting, a new structure of double skewed slot rotor motor is proposed [5,6]. The rotor is divided into two parts. The rotor slot is axially skewed along the opposite direction of the two parts. The middle ring is used to connect the two parts [7,8]. It can eliminate odd-order rotor harmonics and axial shifting. And it has been proved that it is better than a traditional skewed slot rotor motor in reducing electromagnetic noise [9].
However, for large-sized submersible induction motors, it is difficult to apply whether using traditional skewed slot or double skewed slot structure in industrial production. Therefore, the noise problem of the large-sized submersible motors is more prominent than small and medium-sized motors, but it is difficult to solve. Therefore, this paper proposes a radial skewed slot rotor structure, which can effectively reduce the torque ripple and electromagnetic noise by changing the distribution of the air gap magnetic field and is easy to process. The radial skewed slot remains unchanged in the axial direction, which can eliminate the axial shifting caused by using the axial skewed slot. Firstly, the radial electromagnetic force is calculated by the 2-D finite element method, and the natural frequency and mode of stator core and housing are calculated by the 3-D finite element method [10]. Secondly, the radial electromagnetic force of different slot types is decomposed by the 2D-FFT method, and the radial electromagnetic force of specific frequency and order is analyzed. Finally, the vibration of motor housing surface and electromagnetic noise caused by radial electromagnetic force is analyzed.
Analysis model
In order to reduce the electromagnetic noise, the straight slot adopts the closed slot. The structure of the ordinary skewed slot is twisted along the axial direction, but the structure of the radial skewed slot is twisted along the radial direction, and the axial direction remains unchanged. The 2-D models of the straight slot and the radial skewed slot are shown in Fig. 1.
In this paper, the straight slot and the radial skewed slot are analyzed in the 2-D transient field simulator. Except for the different slot types, other parameters of the motor are the same. In addition, other parameters of the motor are shown in Table 1.
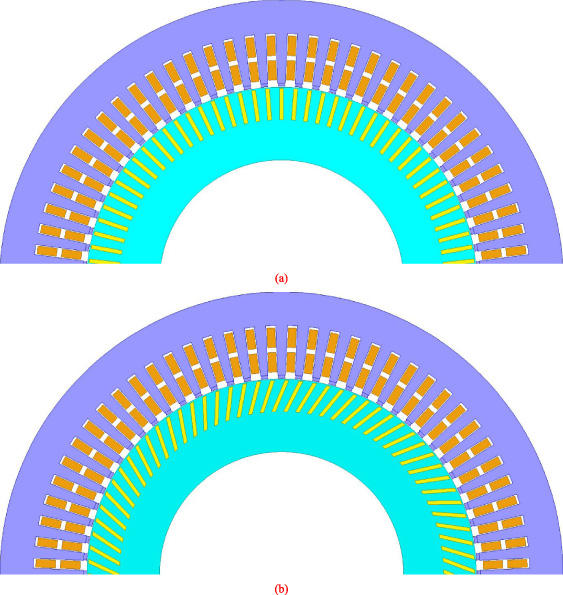
2-D views of straight slot and radial skewed slot. (a) Straight slot. (b) Radial skewed slot.
Parameters of motor model
In order to calculate the electromagnetic vibration and noise of the motor, it is necessary to calculate the radial electromagnetic force first.
Theoretical derivation
As the axial direction of the radial skewed slot is unchanged, the rotor slot section is analyzed, and the rotor slot section is shown in Fig. 2.
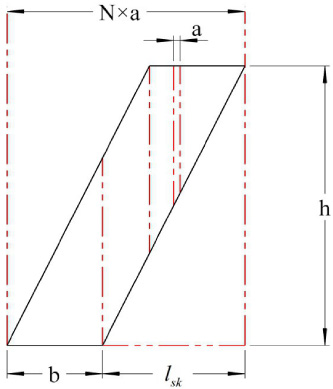
Schematic of radial skewed slot structure.
Where l sk is the twisting distance of the radial skewed slot; b is the width of the rotor slot, and h is the height of the rotor slot.
The rotor conductor is divided into N layers along the outer circle of the rotor.
The harmonic magnetomotive force of radial skewed slot rotor is deduced by the analytical method. The rotor slot is infinite layered along the axial direction, and the total magnetomotive force generated by the rotor conductor can be regarded as the superposition of the magnetomotive force generated by each layer of the conductor. The harmonic magnetomotive force of radial skewed slot rotor can be expressed as
According to the same principle, the total harmonic magnetomotive force generated by the straight slot rotor can be expressed as
From Eqs (2) and (3), it can be obtained that the relationship between harmonic magnetomotive force of the straight slot rotor and the radial skewed slot rotor is
Because the rotor adopts closed slot, so the air gap permeance can be expressed as
After the radial skewed slot is adopted, the slot of stator has no change, so it can be considered that the air gap permeance does not change.
Therefore, the harmonic magnetic field generated by the radial skewed slot rotor can be expressed as
Winding magnetic field can be expressed as
The radial electromagnetic force is generated by the harmonic magnetic field of stator and rotor windings, which can be expressed as
Therefore, the radial electromagnetic force of the radial skewed slot can be expressed as
It can be seen that the distribution of the magnetic field in the air gap is changed by using the radial skewed slot; thus the radial electromagnetic force is changed.
The 2-D FFT method is used to analyze the radial electromagnetic force of different slot types, as shown in Figs 3 and 4. Fig. 3 shows the radial electromagnetic force amplitudes of different orders and frequencies of the straight slot.
The comparison of the amplitudes of different radial electromagnetic forces is shown in Table 2, it can be seen that amplitude of second-order radial electromagnetic force of radial skewed slot is obviously smaller than that of the straight slot. Similarly, as shown in Fig. 4, the application of radial skewed slot will also increase the odd harmonic component. From the subsequent results, the newly introduced odd harmonic component will increase the torque ripple of the motor, but it has little effect on vibration and noise.
This means that the radial skewed slot rotor can effectively reduce the radial electromagnetic force harmonics.
Amplitude of radial electromagnetic force with straight slot and radial skewed slot
Amplitude of radial electromagnetic force with straight slot and radial skewed slot
Z 2 is the number of rotor slots; s is the slip; f 1 is the frequency of the power supply; p is pole-pair numbers. These parameters express the frequency of the force wave.
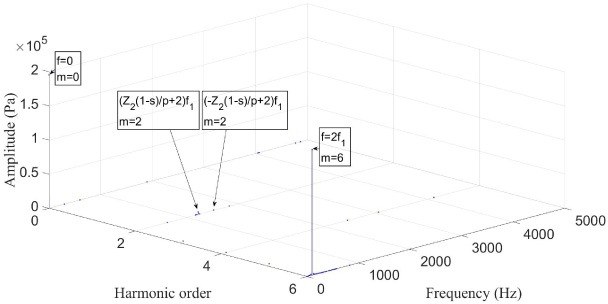
Harmonics of radial electromagnetic force with straight slot.
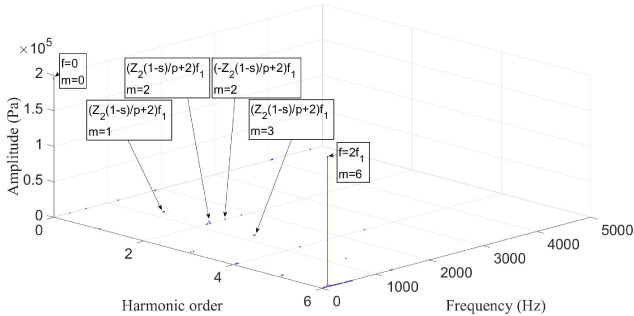
Harmonics of radial electromagnetic force with radial skewed slot.
The electromagnetic force of the tooth is calculated by the finite element method. The results of the radial electromagnetic force calculated are imported, and the harmonic response analysis results are obtained by mechanical coupling. Harmonic response analysis analyzes the distribution of radial electromagnetic force on the inner surface of the stator by the 3-D finite element method so as to calculate the vibration of the outer surface of the motor caused by the radial electromagnetic force.
Order of electromagnetic force
In the induction motor, the vibration of the motor is mainly caused by the low-order electromagnetic force wave. The order of low-order force wave of 72–86 slot combination is shown in Table 3. The frequency of the main electromagnetic force wave in the air gap can be expressed as
Order of electromagnetic force with slot combination 72–86
In vibration analysis, modal analysis is the first step. When the frequency and order of the radial electromagnetic force are close to the natural frequency and mode, the electromagnetic noise will be produced [11,12]. The natural frequency and mode shape of the stator can be calculated by modal analysis.
The modal analysis includes the stator core and housing, and the two surfaces at the bottom of the housing are fixed constraints, as shown in Fig. 5. The number of nodes is 393,120, and the number of units is 154,688. The stator vibration mode is shown in Fig. 6. Table 4 shows the results of modal analysis, including the natural frequencies and modes of the stator.
Natural frequency of stator
Natural frequency of stator
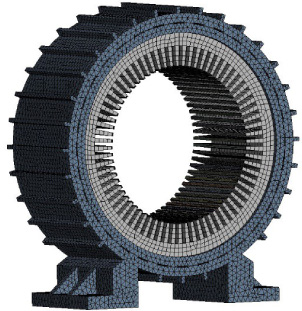
3-D model of modal analysis.
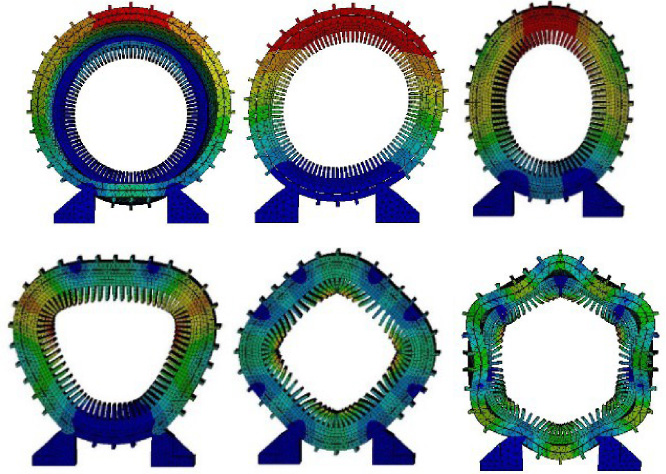
Vibration mode of stator.
The vibration velocity amplitude of stator outer surface with straight slot and radial skewed slot is shown in Fig. 7. As shown in Fig. 7, although the radial electromagnetic force component occupied by the fundamental wave is large, the vibration generated by the fundamental wave is slight. The vibration caused by the fundamental wave at 100 Hz is not the cause of excessive electromagnetic noise. The maximum vibration speed of the motor occurs at 2340 Hz.The vibration velocity amplitude of the stator outer surface with a straight slot at 2340 Hz is 2.7 mm/s, and the vibration velocity amplitude of the stator outer surface with radial skewed slot at 2340 Hz is 1.8 mm/s.
The vibration velocity at 2340 Hz is reduced when changing from straight slot to radial skewed slot. It can be seen that the vibration velocity amplitude of the outer surface of the stator with the radial skewed slot is lower than the straight slot, which indicates that the radial skewed slot can effectively weaken the vibration.
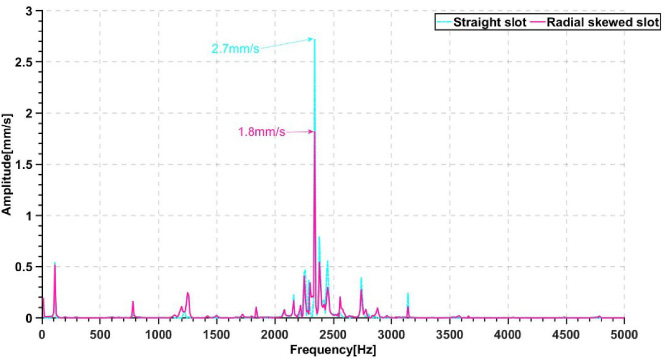
Amplitude of vibration velocity of stator outer surface with straight slot and radial skewed slot.
The results of harmonic response analysis are used as the excitation of noise calculation. The vibration of the outer surface of the stator causes the noise [13]. By calculating the noise of different slot types, the cloud chart of A-weighted sound pressure level at 2340 Hz is shown in Fig. 8. It can be seen from Fig. 8 that the noise is mainly distributed in four directions of the motor.
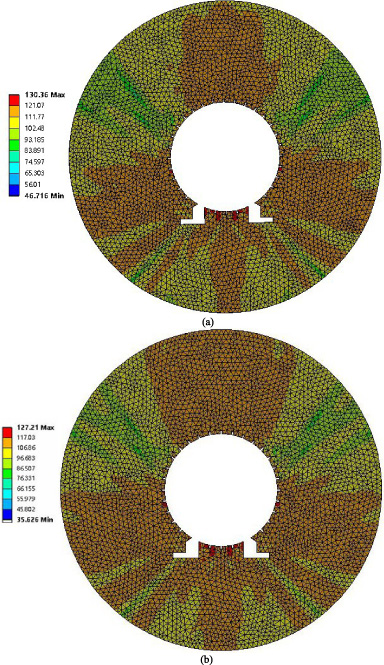
Sound pressure level at 2340 Hz with straight slot and radial skewed slot. (a) Straight slot. (b) Radial skewed slot.
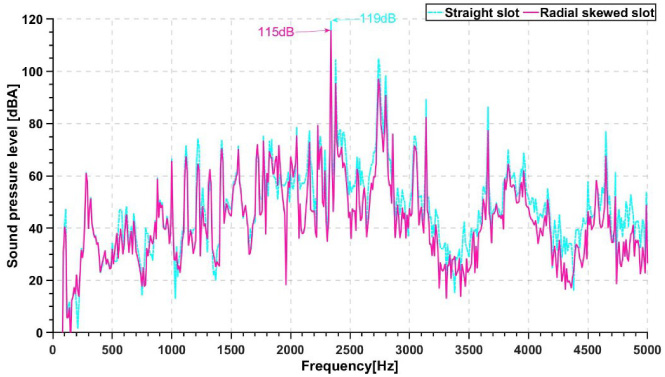
Generally, the noise is measured at 1 m away from the surface of the motor, so the noise of the straight slot and the radial skewed slot is measured at one point, as shown in Fig. 9, which is one meter away from the motor housing. According to Fig. 9, the noise of radial skewed slot is lower than straight slot.
The noise of straight slot rotor induction motor is 119 dB at 2340 Hz, while the noise of radial skewed rotor induction motor is 115 dB at 2340 Hz. At 2340 Hz, the radial electromagnetic force, vibration and noise waveforms of the induction motor with different slot types are consistent. This means that the radial skewed slot can effectively reduce the electromagnetic noise of large-sized submersible motors. In addition, from the noise peak at 2340 Hz and the sixth-order mode at 2260 Hz, it can be inferred that the motor generates sixth-order mode resonance, which is the reason why the motor suffers serious vibration and noise at 2340 Hz.
The radial skewed slot rotor of the prototype is shown in Fig. 10. The prototype experiment is shown in Fig. 11. In the experiment, the sound level meter is used to measure the maximum noise amplitude of the prototype at 1 m outside the motor casing, and the straight slot submersible motor and radial skewed slot motor are tested, respectively. The test data show that the noise is reduced by 3.8 dB after using the radial skewed slot. The experiment shows that the radial skewed slot can weaken the electromagnetic noise of large-sized submersible motors.
Noise at one point with straight slot and radial skewed slot.

Radial skewed slot rotor of prototype.

Motor prototype.
The torque curves of different slot types are shown in Fig. 12. The average torque of a straight slot is 4.90 kNm, while the average torque of radial skewed slot is 4.80 kNm. At the same speed, the output torque of the radial skewed slot is smaller than the straight slot, so the output power of the radial skewed slot is also smaller. In addition, the torque ripple of the straight slot is 2%, while the torque ripple of the radial skewed slot is 3.5%. The increase of torque ripple may be due to the introduction of a new odd component after using the radial skewed slot structure. This component has little effect on electromagnetic vibration and noise but increases torque ripple. So, the torque ripple of radial skewed slot motor is higher than that of straight slot motor, but the noise is lower than that of straight slot motor, which indicates that its noise reduction ability is better.
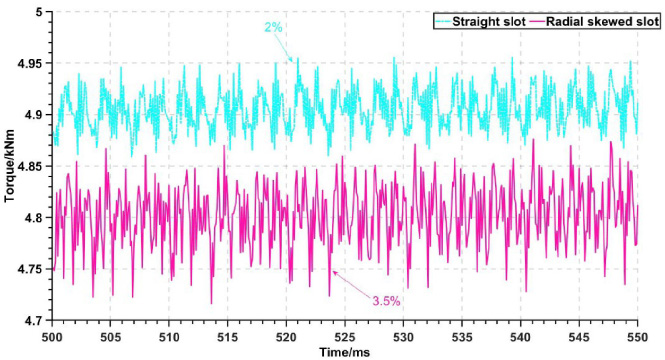
Output torque waveform as a function of time at the nominal current.
The loss and power of the induction motor with a straight slot and radial skewed slot are shown in Table 5. The output power of a straight slot rotor induction motor is 508.52 kW; The output power of radial skewed slot rotor induction motor is 498.14 kW. From the perspective of output power, the straight slot is better than the radial skewed slot, but considering the loss, the efficiency of the radial skewed slot is close to that of the straight slot motor [14,15].
Loss of induction motor with straight slot and radial skewed slot
At present, it is difficult for large submersible motors to apply traditional skewed slot and double skewed slot structures in industrial production, so the electromagnetic vibration noise is higher than that of traditional motors. In this paper, the theoretical verification is carried out through the analytical method. The radial skewed slot structure reduces the electromagnetic noise and avoids industrial production problems. During the simulation, the radial electromagnetic force, vibration and noise of straight slot, and radial skewed slot are analyzed by using 2-D FFT and multi-physical field coupling method. Through a series of simulation results, it can be concluded that the vibration and noise of large-sized submersible motors are obviously reduced after adopting a radial skewed slot structure. Then the prototype experiment is carried out to verify that the radial skewed slot structure can weaken the electromagnetic noise of large-sized submersible motors.
In addition, in the simulation process, in order to simulate the traditional skewed slot, the 3-D finite-element method needs to be used to analyze the electromagnetic field. The radial skewed slot only needs the 2-D finite-element method to analyze the electromagnetic field, which makes it easier to obtain the required simulation data. Nevertheless, it also has some shortcomings. The output torque of the radial skewed slot motor is reduced compared to the straight slot. These problems will also be solved in the follow-up research.
Footnotes
Acknowledgements
This work was supported in part by the National Natural Science Foundations of China under grant 51977055 and Major Science and Technology program of Anhui province under grant 201903a05020042. This work is partially supported by Fundamental Research Funds for the Central Universities JZ2021HGQA0198.