
Abstract
Aiming at a hybrid electric vehicle with compound power supply, firstly a fuzzy control strategy of engine and motor torque distribution is designed by taking the difference between engine target torque and current torque and SOC of storage battery as inputs and the actual output torque coefficient of engine as output. Secondly, the particle swarm optimization (PSO) algorithm is designed to optimize the fuzzy rules, which promotes the method that the traditional fuzzy rules depend on experience, improves the adaptability and robustness of the fuzzy control, and improves the control accuracy. Finally, the research based on the special simulation software ADVISOR of hybrid electric vehicle shows that the optimized fuzzy rules applied to the torque distribution control of hybrid electric vehicle can ensure that the engine works in the high efficiency area and effectively improve the economy of the vehicle on the premise of ensuring the power performance of the vehicle.
Introduction
In order to cope with energy shortage and increasingly serious environmental pollution, hybrid electric vehicles have become the focus of research in various countries [1]. Parallel Hybrid Electric Vehicle contains two independent power sources, engine and motor. It is necessary to realize the effective conversion of energy flow between power components and to rationally distribute the power or torque of engine and motor to make the components of the whole vehicle, including engine and motor, work in high efficiency area, so as to improve the fuel economy and emission performance of the vehicle, to optimize the comprehensive performance of the power system and achieve the goal of energy saving and emission reduction of hybrid electric vehicles [2, 3]. Therefore, it is of great significance to design a reasonable and efficient energy management strategy [4].
At present, the energy control strategy of parallel hybrid electric vehicle mainly includes the steady state control strategy based on simple rules, the dynamic control strategy based on optimization and the intelligent control strategy. The rule-based control strategy relies on engineering experience and determines the matching point of the torque distribution according to the steady-state MAP diagram. Moreover, the rule is not easy to change, so it is difficult to adapt to the dynamic working conditions [5]. The control strategy based on optimization includes global optimization and instantaneous optimization. At present, most of the strategies are dynamic programming. The algorithm of optimization strategy is too computational and difficult to be applied in real vehicles [6, 7, 8]. Fuzzy control is the most widely used intelligent control strategy at present [9, 10, 11, 12]. It does not need to establish a mathematical model and has good adaptive performance, but the formulation of fuzzy rules depends on expert experience and is difficult to guarantee the optimum [13, 14]. In order to obtain effective fuzzy rules and improve the effectiveness of fuzzy control, Hu et al. optimized the control strategy of ISG hybrid electric vehicle based on the optimization results of sequential quadratic programming (SQP) as the guidance for formulating the fuzzy control rules [15]. Yang et al. used genetic algorithm to optimize the fuzzy controller and applied it to vehicle driving and braking mode [16]. Some scholars used particle swarm optimization to optimize the quantization factor of the fuzzy controller, which improved the robustness and control accuracy of the fuzzy controller [17, 18].
Based on the existing hybrid electric vehicle models, this paper presents a control strategy of torque allocation energy for hybrid electric bus using PSO to optimize fuzzy control. Firstly, based on the control mode of engine efficiency, the energy management strategy of fuzzy rules is designed. The difference between target torque and required torque and SOC of storage battery are used as two inputs of the fuzzy controller, and the actual output torque coefficient of the engine is used as the output of the fuzzy controller, so as to ensure that the engine works in the peak efficiency region. Secondly, the PSO is used to optimize the fuzzy control rules, and then the optimized fuzzy control rules are used to redistribute the torque of the engine and motor. Finally, the energy management strategy of torque allocation before and after optimization is embedded in ADVISOR software, and the vehicle performance is simulated under Real Driving Cycle of Passenger Cars in Typical Cities of China, the results verified that the effectiveness of the optimized fuzzy control strategy is effective.
Design of fuzzy control strategy
In this paper, a bus with composite power supply system is taken as a prototype to develop control strategy. The hybrid electric bus adopts parallel transmission structure, the transmission structure is shown in Fig. 1. The vehicle parameters are shown in Table 1, and the engine parameters of the hybrid bus are shown in Table 2. According to the vehicle dynamic performance requirements to determine motor parameters, the PM Brushless DC Motor is used as the motor by calculation. The specific parameters are shown in Table 3.
Vehicle parameters
Vehicle parameters
Engine parameters
Motor parameters
Structure of parallel transmission structure.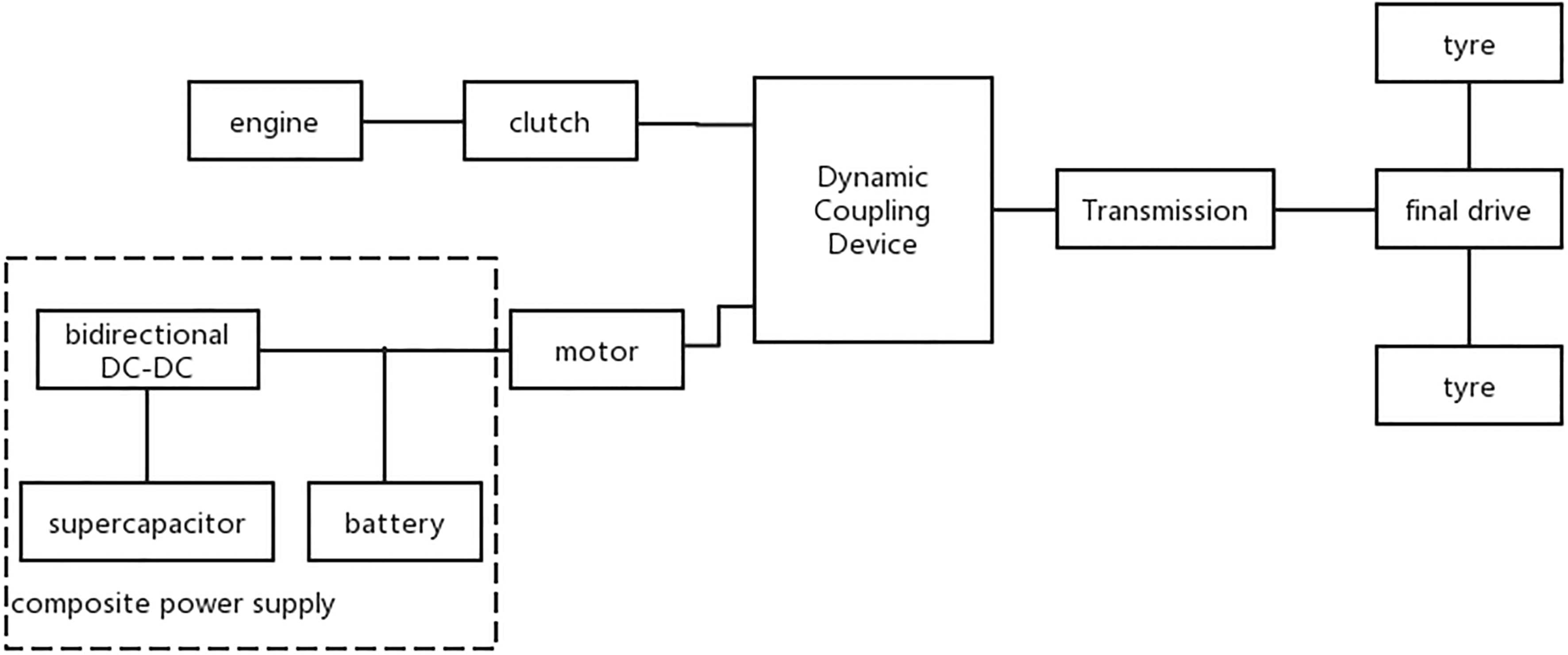
The composite power supply adopts the parallel connection form of storage battery and supercapacitor. The storage battery serves as the main power supply to provide the average power required by the motor. The supercapacitor takes full advantage of its advantages of fast charging and fast releasing, and works as an auxiliary power supply under the conditions of starting, climbing, accelerating and braking of the hybrid electric bus. It plays the role of “peak-cutting and valley-filling”, meets the instantaneous power demand and protects the storage battery by reducing current impact, thereby prolongs battery life. Among them, the battery must satisfy the requirement of endurance mileage and average power under specified cycle conditions. According to the cycle conditions selected in this paper, the demand power of the cycle conditions is decomposed, and the positive and negative power requirements are integrated separately, so that the corresponding positive and negative energy demands under driving mode and braking mode of the bus can be obtained, including positive energy demand 1.088
The power allocation control strategy of composite power supply adopts logic threshold filter control strategy. In order to ensure that the supercapacitor can fully play the role of peak shaving and valley filling and improve the energy transfer efficiency, the SOC value of supercapacitor should be considered in addition to the calculation of the required power of composite power supply. According to practical engineering experience and considering the charge-discharge characteristics of supercapacitor, the upper limit value of supercapacitors is 0.95 and the lower limit value is 0.25 in the power shunting strategy of composite power supply to avoid supercapacitor overcharging or overdischarging. The SOC estimation of supercapacitor is based on as follow:
where,
The hybrid electric vehicle studied is a parallel hybrid electric vehicle. The vehicle is driven by engine and motor, in which the engine is the main power source and the motor is the auxiliary power source. The fuzzy control strategy adopts the model based on engine efficiency. On the premise of satisfying the charge-discharge balance of storage battery, the actual output torque of the engine is adjusted to make the engine work in the high efficiency area as far as possible, and the output torque is close to the optimal torque of the engine, so as to improve the efficiency of the engine and make the motor run as efficiently as possible. The fuzzy control strategy is in the form of double input and single output, taking the difference between the target torque and the current demand torque T and SOC of storage battery as the input, the actual output torque coefficient of engine as the output, and the product of the torque coefficient and the corresponding optimal torque as the output torque of engine. The structure of the fuzzy controller is shown in Fig. 2.
Structure of the fuzzy controller.
The definition of battery SOC is the ratio of residual capacity to full capacitance. According to this definition, the SOC is estimated by the ampere-time method. The SOC of battery can be expressed as:
In the formula,
In order to control the actual working point of the engine in its peak efficiency region, the target torque of the engine should be determined according to the universal characteristic curve of the engine. On the universal characteristic curve, the minimum specific fuel consumption point should be selected according to different rotational speeds as the optimal torque curve of the engine [20]. In the control strategy, according to the current engine demand speed and the optimal torque curve, the target torque corresponding to the engine working in the high efficiency region is determined. The universal characteristic curve of the hybrid electric vehicle is shown in Fig. 3.
Universal characteristic curve.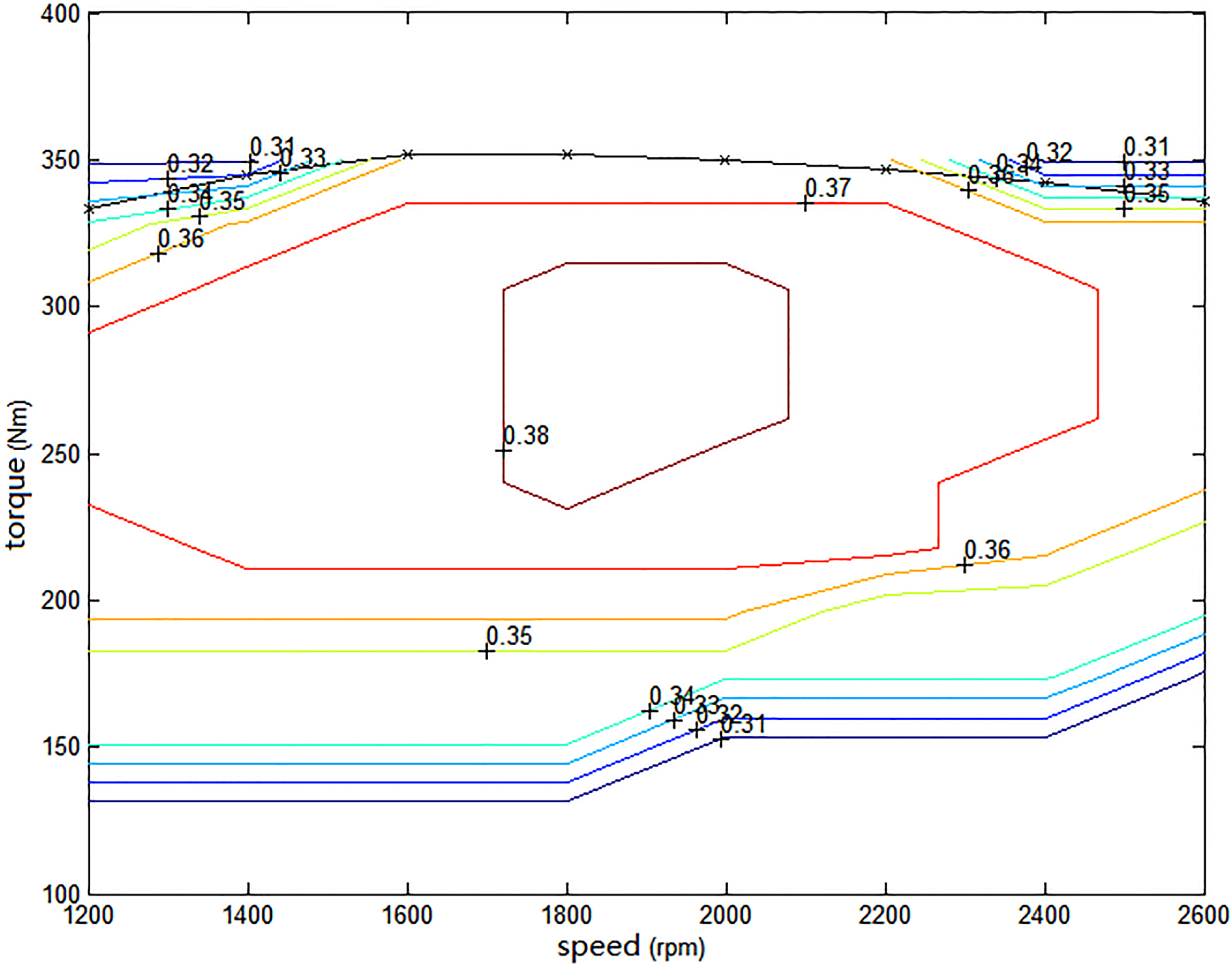
According to the universal characteristic curve, the maximum torque of the engine is 350 Nm, and the difference between the maximum torque and the minimum torque is 350 Nm. Considering the critical value, the fuzzy universe of input torque difference T of the fuzzy control strategy is determined as [
Another input of the fuzzy controller is the SOC of the battery, and the range of the SOC value is [0, 1]. The values of SOC’s fuzzy language variables are divided into five categories, namely “positive big”, “positive small”, “zero”, “negative small” and “negative big”. They are expressed by letters PB, PS, ZE, NS and NB, respectively. The trapezoidal membership function is also chosen to complete the fuzzification. The membership function of the input is shown in Figs 4 and 5.
Membership function of torque difference T.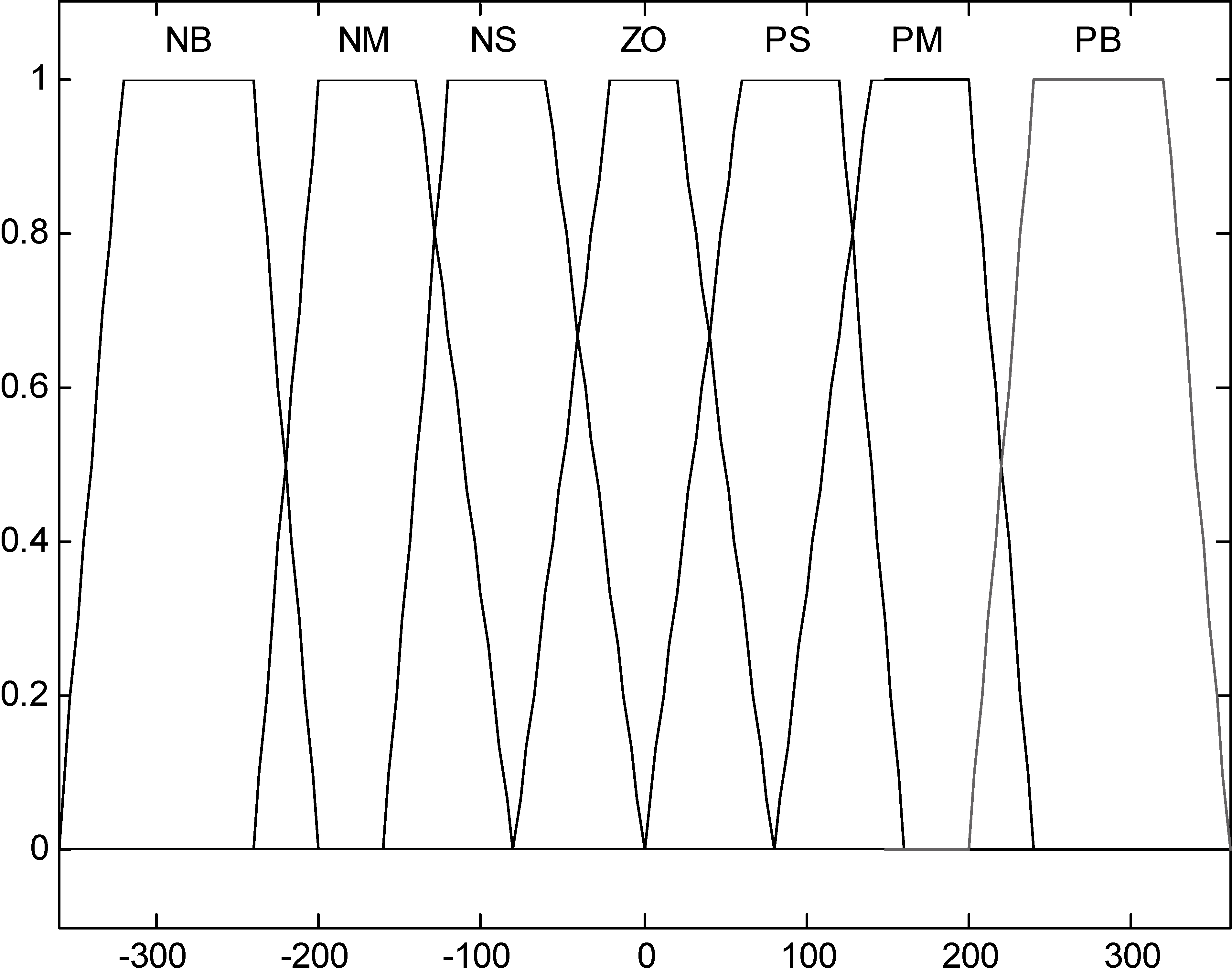
Membership function of SOC.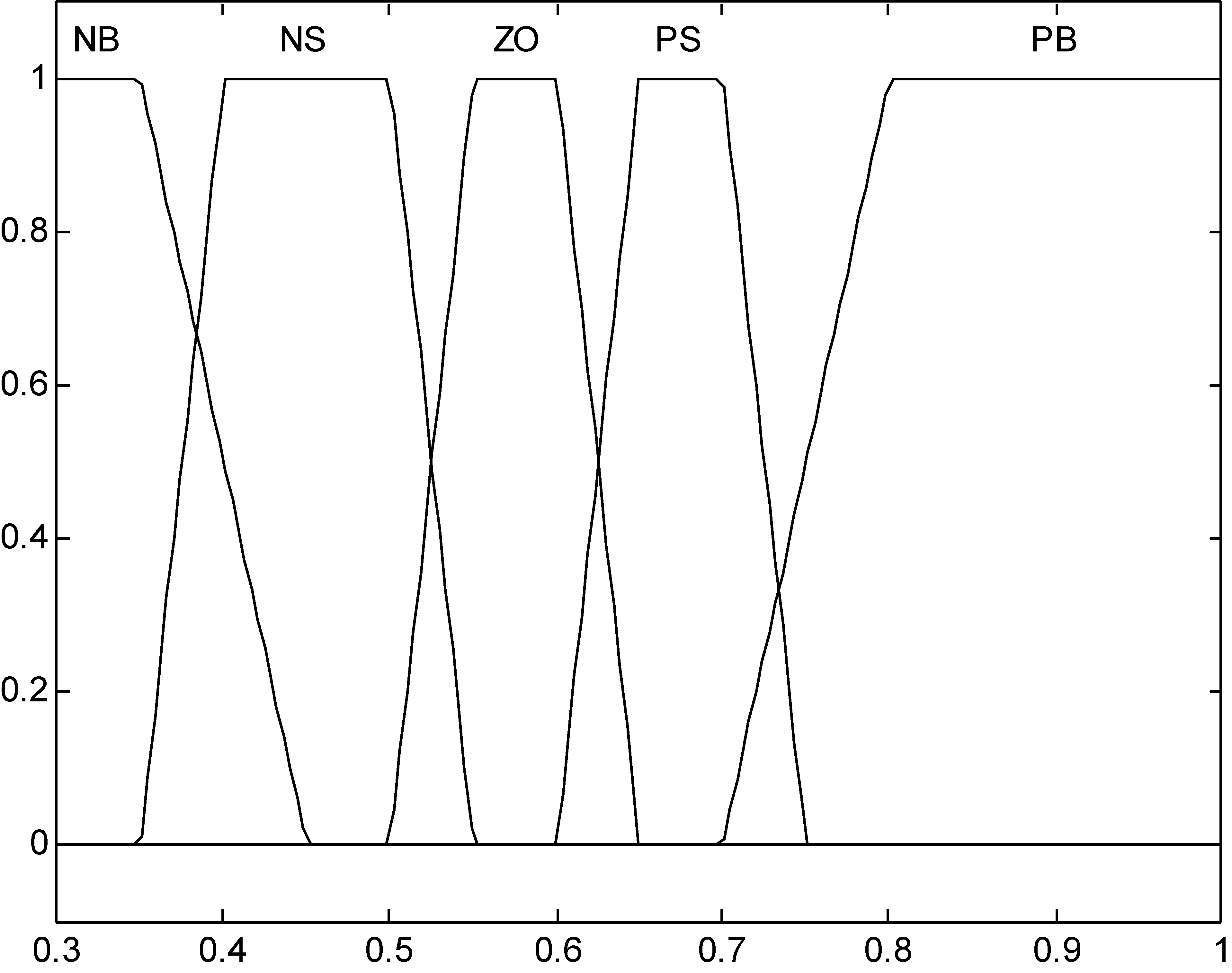
The output of the fuzzy controller is the engine output torque factor K. The output torque factor K is the ratio of the maximum and the best output torque of the engine. According to the universal characteristic curve, based on the principle of minimum specific fuel consumption point, the optimal torque range of the engine is 250 Nm–330 Nm, therefore the range of the output torque factor is [0, 1.4]. The fuzzy controller adopts Sugeno type and combines the de-fuzzification with the fuzzy reasoning to obtain the final output of the precise quantity [21]. Therefore, the value of K is set as [0 0.2 0.4 0.5 0.6 0.7 0.75 0.8 0.85 0.9 0.95 1 1.05 1.1 1.15 1.2 1.25 1.3 1.35 1.4], using K1, K2 …K20, respectively.
According to the input and output quantities determined above, the “IF-THEN” fuzzy reasoning rule is adopted and T-S reasoning mode is selected. The weighted average method “wtaver” is used to calculate the output quantities. The established fuzzy rules are shown in Table 4.
Fuzzy rules
The designed fuzzy control model is embedded in ADVISOR, and the top-level model of hybrid electric bus is established, as shown in Fig. 6. Easy to optimize the fuzzy controller, the torque identification and processing part of the fuzzy torque distributor is constructed with MATLAB/Simulink module whereas the fuzzy controller is compiled in the form of M file. The fuzzy torque distributor is named FUZZY module in the figure.
Top-level model of hybrid electric bus driven by rear shaft of compound power supply based on fuzzy control strategy.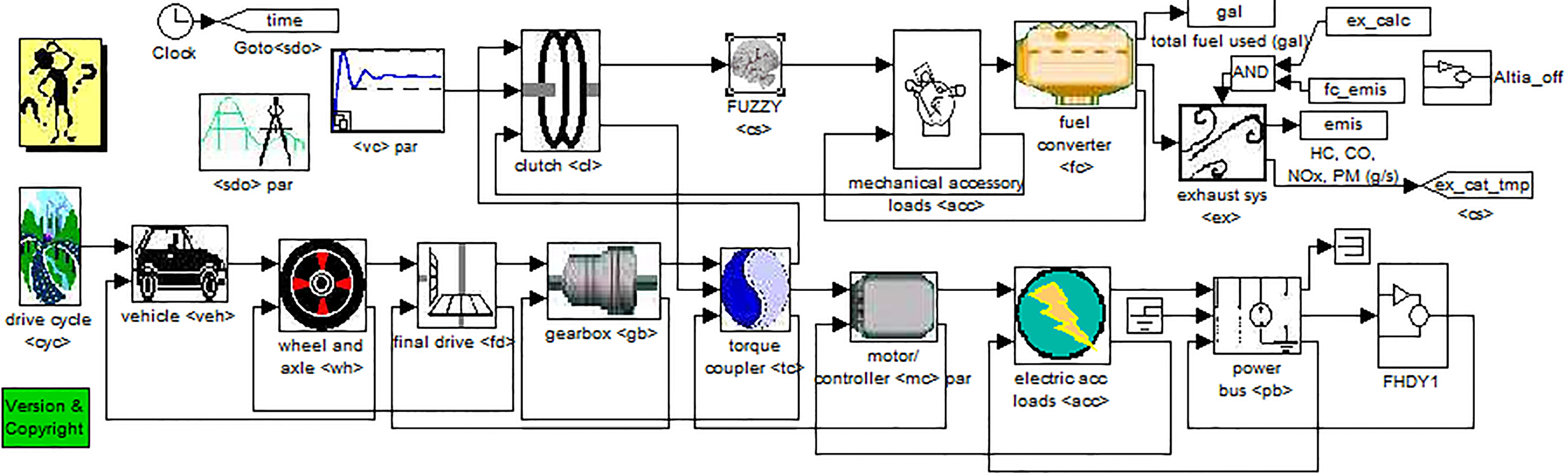
Basic PSO algorithm
The idea of particle swarm optimization (PSO) arises from the research and behaviour simulation of simplified bird swarm model, which simulates the behaviour of bird swarm flying and foraging, and makes the whole swarm optimal through the cooperation of the whole swarm. PSO searches in solution space following the optimal particle, without crossover and mutation of genetic algorithm [22]. Using PSO to solve a problem, the individual in the model is abstracted as a “particle” without mass and volume. The process of finding the optimal solution in complex space is realized through the cooperation and information sharing between “particles” [23].
In the search space of n-dimensional particle swarm optimization, each particle
where,
The formulation of fuzzy control rules mostly depends on expert experience, and there is no specific design method. Especially in the case of frequent energy changes of hybrid electric vehicles, it is difficult to design the optimal fuzzy control rules. To improve the efficiency of the fuzzy controller in the energy management of hybrid electric vehicle, ensure the power performance of the vehicle and reduce the economic index, PSO is used to optimize the fuzzy control rules.
In this paper, the design objective of the fuzzy controller is that the engine works in the peak power region as far as possible. Therefore, the optimization objective of PSO is to minimize the error between the actual and the target torque of the engine. The ITAE method is adopted, that is, the optimization objective function is as follows:
Considering that there are 7 rows and 5 columns in the fuzzy rules, namely 35 fuzzy rules, and when the fuzzy controller is applied, 35 fuzzy rules play a role as a whole, that is, when the fuzzy rules are optimized, the optimal combination of the whole must be sought. Therefore, the parameters of the PSO optimization algorithm are the whole fuzzy rules. In the PSO algorithm, 35 fuzzy rules are rewritten into one row and 35 columns for processing. The specific steps of optimization are as follows:
Flow chart of PSO optimizing fuzzy control rules.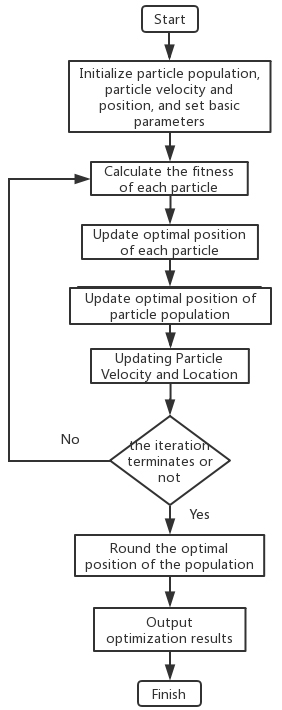
Initialization. The population size is set to 20, that is, the total number of particles in the population is 20. The range of particle position is the range of output of fuzzy rules, [1, 20]. In order to prevent the particle velocity from being too large to exceed the scope of the searched space, and the output of the fuzzy rule is an integer, the range of the update speed of all particles is set to [ Calculate the fitness of each particle and determine the current optimal position of the particle according to the following formula:
The updated optimal location and its fitness are preserved in the current individual optimal location. After updating the optimal position and fitness of all the particles, the minimum of them is selected as the optimal position and fitness of the population, and the optimal solution of the current generation population is updated. Adjust the velocity and position of the current particle using Eqs (3) and (4). If the calculation results exceed the set boundary range, the velocity and position of the particle are updated with the boundary value. Check the termination condition of the algorithm. If the iteration algebra is reached or the calculation error is zero continuously, the algorithm will be stopped, otherwise the return step (2) will continue to execute. Because the output of the fuzzy rules in the fuzzy controller is positive integer, the optimal position of the optimized population, i.e. the optimal output, needs to be taken as an integer. This paper adopts the operation of taking integer in the direction of positive integer. The 35 output results correspond to 35 fuzzy rules in the fuzzy rules table, and the optimized fuzzy rules can be obtained by replacing the original rules table with them. So far, the optimization process is over.
The flow chart of PSO optimizing fuzzy control rules is shown in Fig. 7.
According to the above optimization method, the PSO optimization program is compiled into M file, and the fuzzy rules are optimized. The structure of the fuzzy torque distributor is established as shown in Fig. 8. In the figure, the S-Function module is the fuzzy control program and the S-Function1 module is the PSO optimization algorithm program. By embedding the distributor in ADVISOR, the vehicle performance can be tested under specified conditions.
Structure diagram of fuzzy torque distributor with PSO optimization.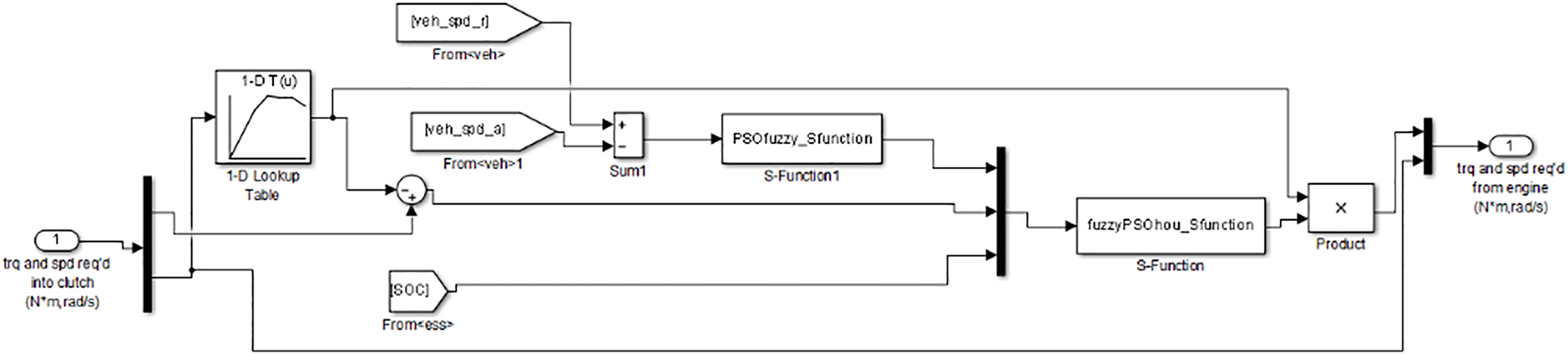
To verify the effectiveness of the proposed vehicle fuzzy control strategy applied to hybrid electric bus with compound power supply, the ADVISOR simulation environment is used for modelling and simulation analysis, and the typical urban cycle condition in China is selected as the test condition. At the same time, the vehicle torque control strategy of ADVISOR is compared with the original vehicle torque control strategy of ADVISOR. The test condition curve is shown in Fig. 9.
Cyclic working condition curve of typical cities in China.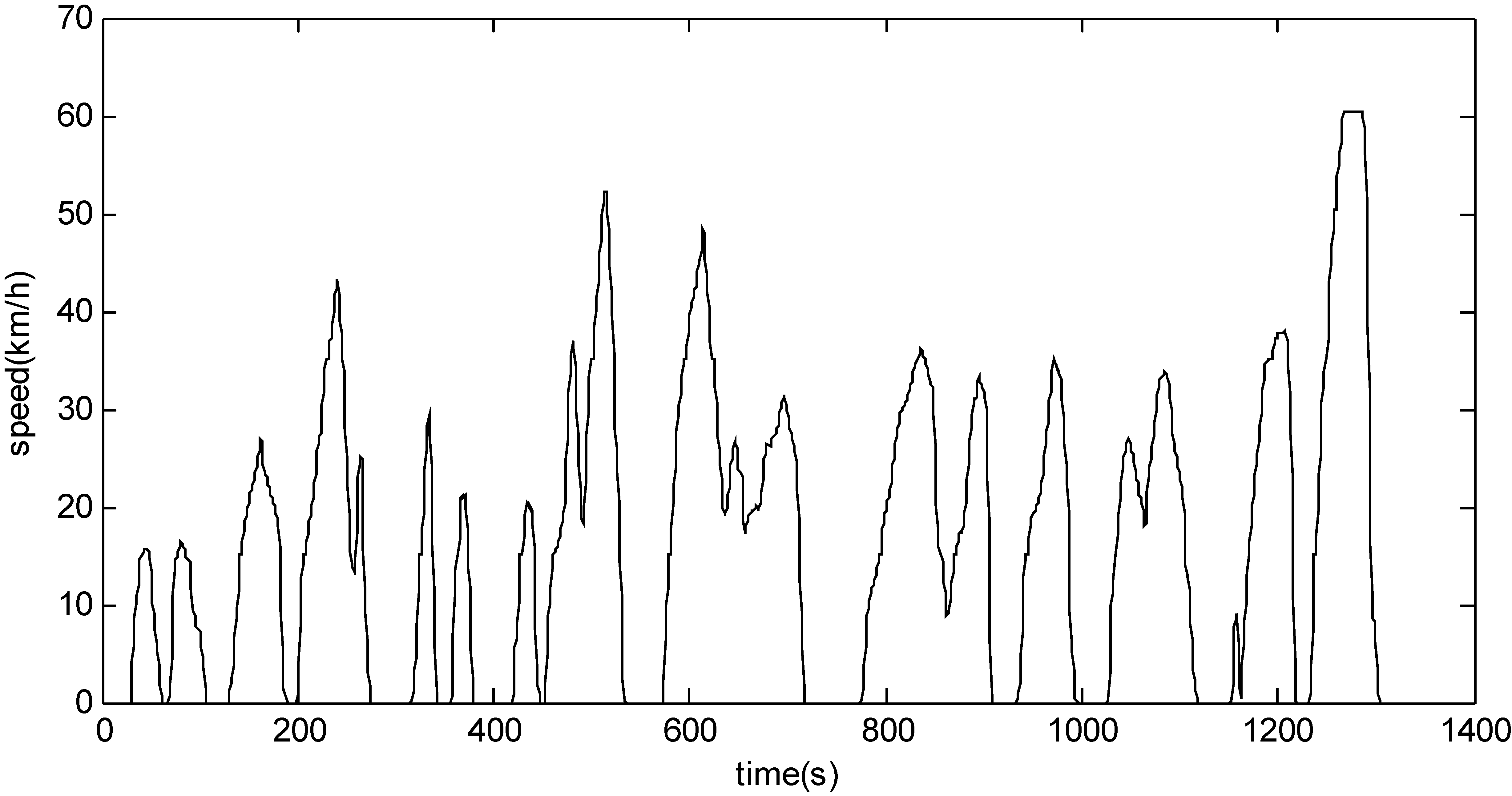
Operating point contrast diagram (On the left is the electric assist strategy and on the right is the fuzzy control strategy).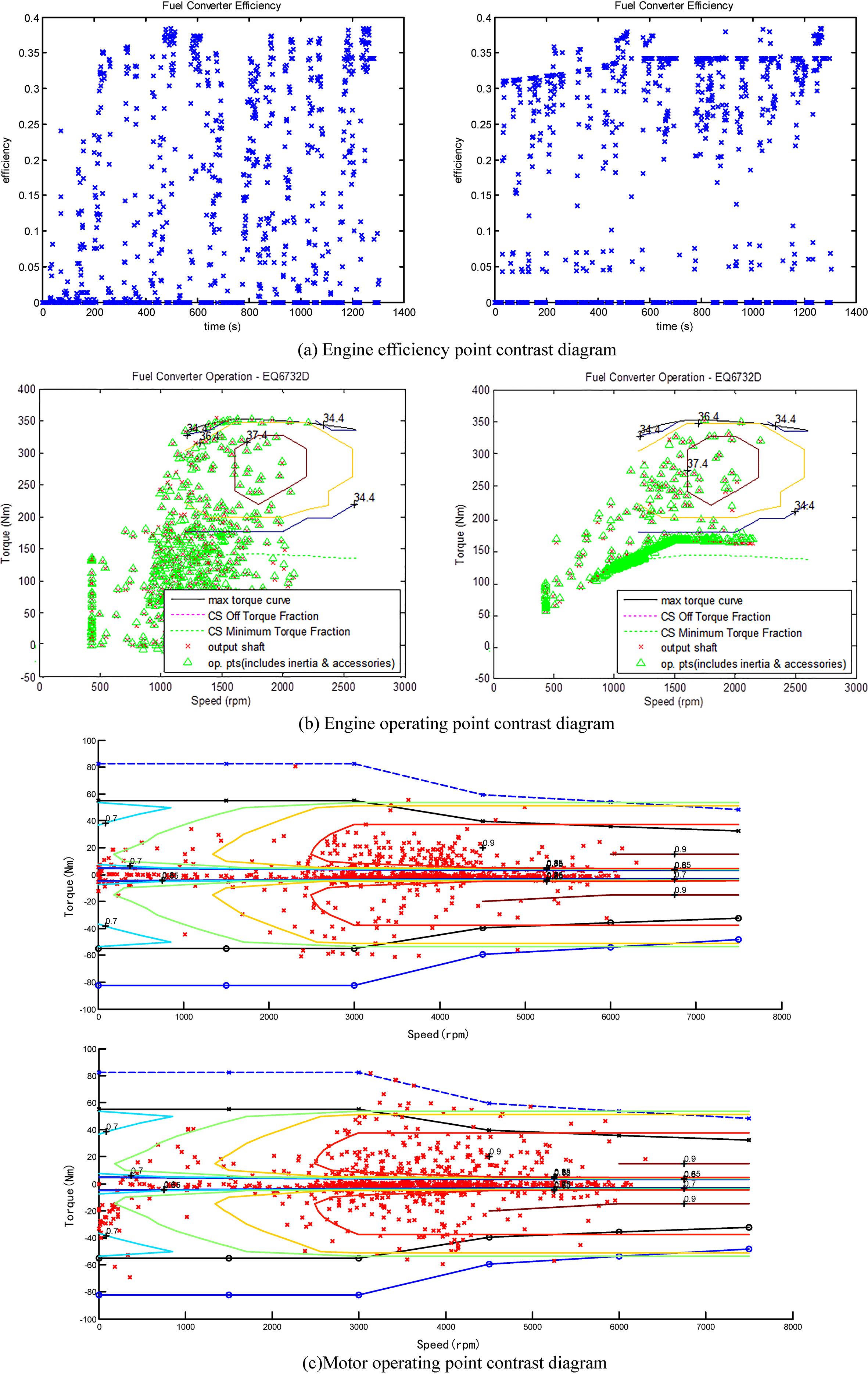
The fuzzy control strategy designed in this paper aims to meet the performance of the vehicle and improve the efficiency of the engine, so as to reduce emissions and improve economy. The two diagrams in Fig. 10a are the actual working efficiency point diagrams of the engine under the original electric assist control strategy of ADVISOR and the fuzzy control strategy designed in this paper. It can be clearly seen that under the original strategy, the highest efficiency of the engine reaches nearly 0.4, but the working points are scattered and the overall efficiency is not high. Under the fuzzy control strategy designed in this paper, the working points of the engine are more intensive and the efficiency is concentrated between 0.3 and 0.4, which indicates that the overall efficiency of the engine has been improved. The two groups of diagrams in Fig. 10b and c are the actual working point diagrams of the engine and motor under the original electric assist control strategy of ADVISOR and the fuzzy control strategy designed in this paper. Compared with the original control strategy, it is obvious that although the working point of the engine does not reach the high efficiency area, it avoids the low torque and high emission area. The working point of the engine is more centralized, and the working point of the motor basically falls in the high efficiency area.
Figure 11 is a comparison chart of battery SOC under electric assist strategy and fuzzy control strategy. The blue curve is the curve of battery SOC under the original electric assist strategy, and the red curve is the curve of battery SOC under the fuzzy control strategy. The initial SOC value is set to 0.7 and the discharge limit is 0.2. From the graphs, it can be seen that both control strategies enable the battery to complete charging and discharging and maintain energy balance during the charging and discharging process. The change of SOC initial state and termination state is less than 10%. However, because the engine operating point under the fuzzy control strategy is still in the area of low torque, it shows that under the premise of satisfying the power performance of the vehicle, the fuzzy control strategy more frequently to control the motor to supplement the power, so the motor working time is more, which leads to a slight decrease in SOC of the storage battery compared with the original strategy, and the decrease is 0.025 at the end of the strategy, but no obvious difference. It is illustrated that the fuzzy strategy ensures both power economy and battery charge-discharge balance.
Contrast chart of battery SOC under electric assist strategy and fuzzy control strategy.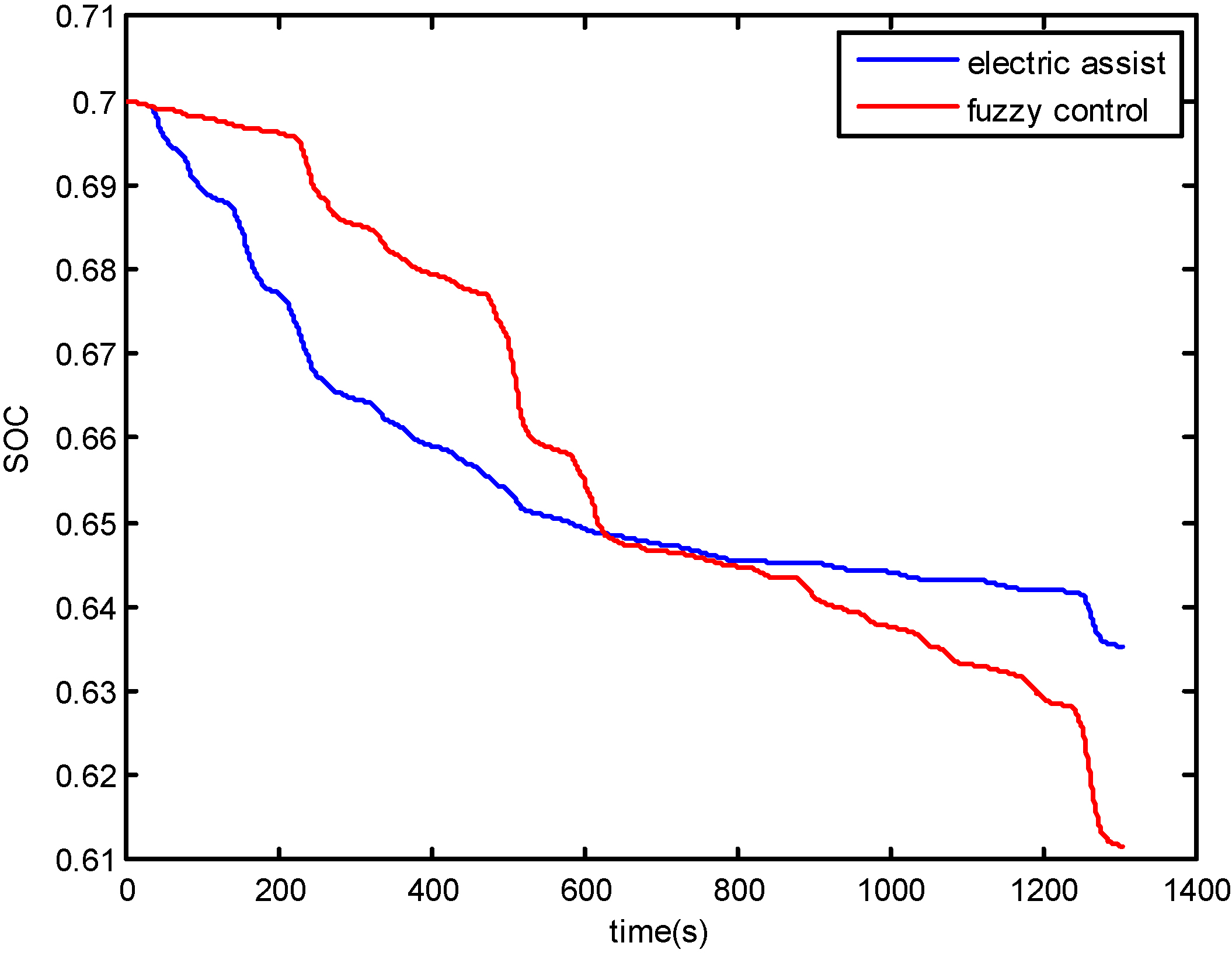
Operating point contrast diagram (On the left is the fuzzy control strategy before optimization and on the right is the optimized fuzzy control strategy).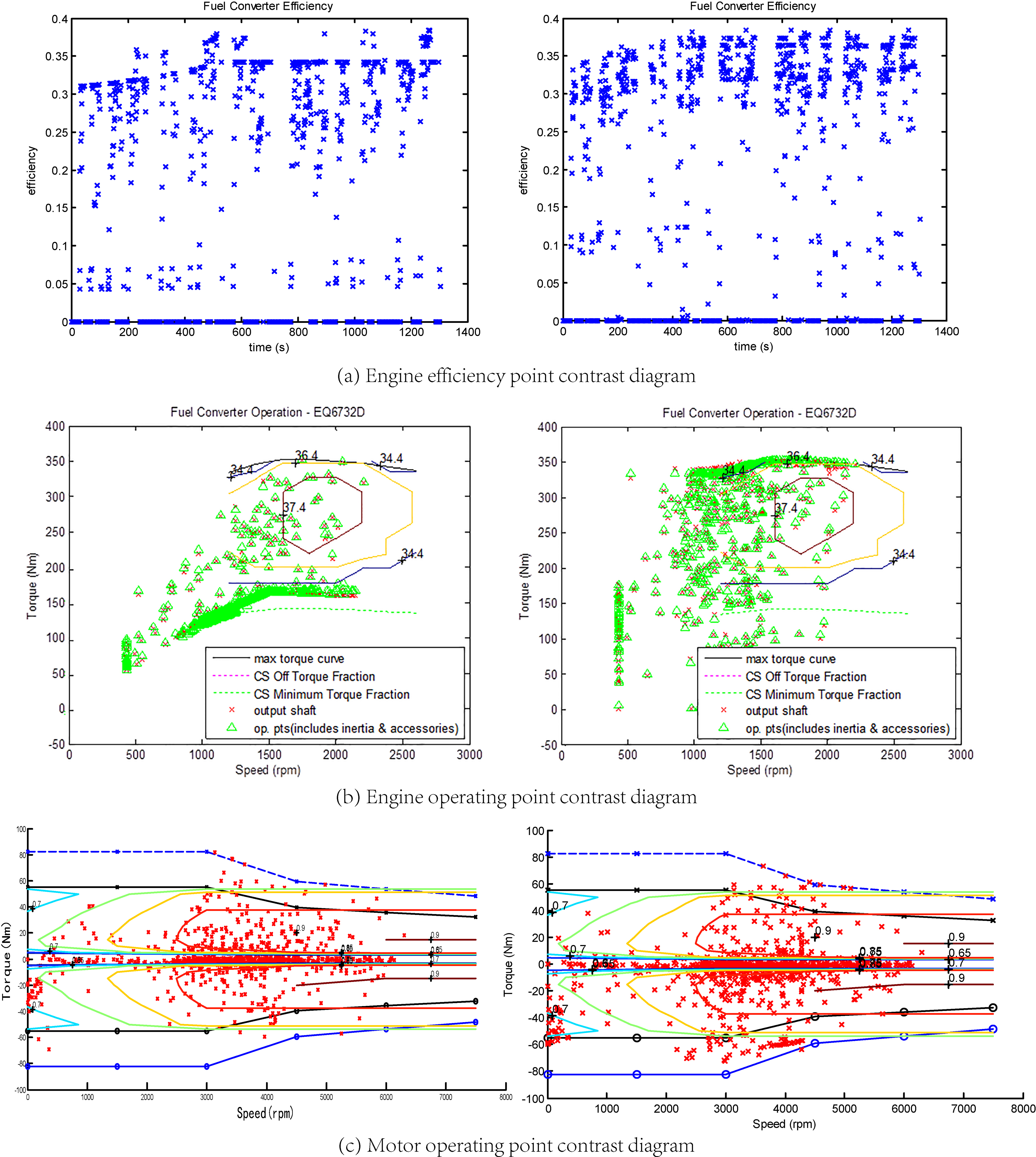
In order to verify the effectiveness of the optimized fuzzy control strategy, the optimized fuzzy torque distribution controller is embedded in ADVISOR. Similarly, the vehicle performance is simulated under typical urban conditions in China, and compared with the fuzzy control strategy before optimization. The results of comparison between engine and motor before and after optimization are shown in Fig. 12. The left side of the graph is the effect of the fuzzy controller before optimize, and the right side is the effect of the optimized fuzzy controller. As can be seen from Fig. 12a, the efficiency points of engine are more concentrated in the efficiency range of 30%–40% with optimized controller, which indicates that the engine has higher efficiency in the whole process. The actual working points of engines and motors in Fig. 12b and c are mostly in high efficiency, which improves the system efficiency of the whole vehicle.
The required power of the motor is provided by the composite power supply system, in which the average power is provided by the battery and the peak power is provided by the supercapacitor. The power comparison curve is shown in Fig. 13. According to the figure, the maximum power provided by the battery is only 20 kW. The supercapacitor provides the transient part of the power required by the motor. The instantaneous power can reach 47 kW by giving full play to its characteristics of fast charging and fast amplifying. The working current of the battery and supercapacitor in the composite power supply is shown in Fig. 14. The maximum discharge current of the battery in the diagram is only 70 A, and the fluctuation of the discharge current is small, while the instantaneous current of the supercapacitor is close to 400 A. At the same time, the current of the battery in the composite power supply is basically zero under the braking condition. It is also verified from the side that the supercapacitor is used for energy recovery, which shows its cutting. Peak filling and valley filling can improve the life of storage battery.
Power contrast diagram of battery and supercapacitors in compound power supply.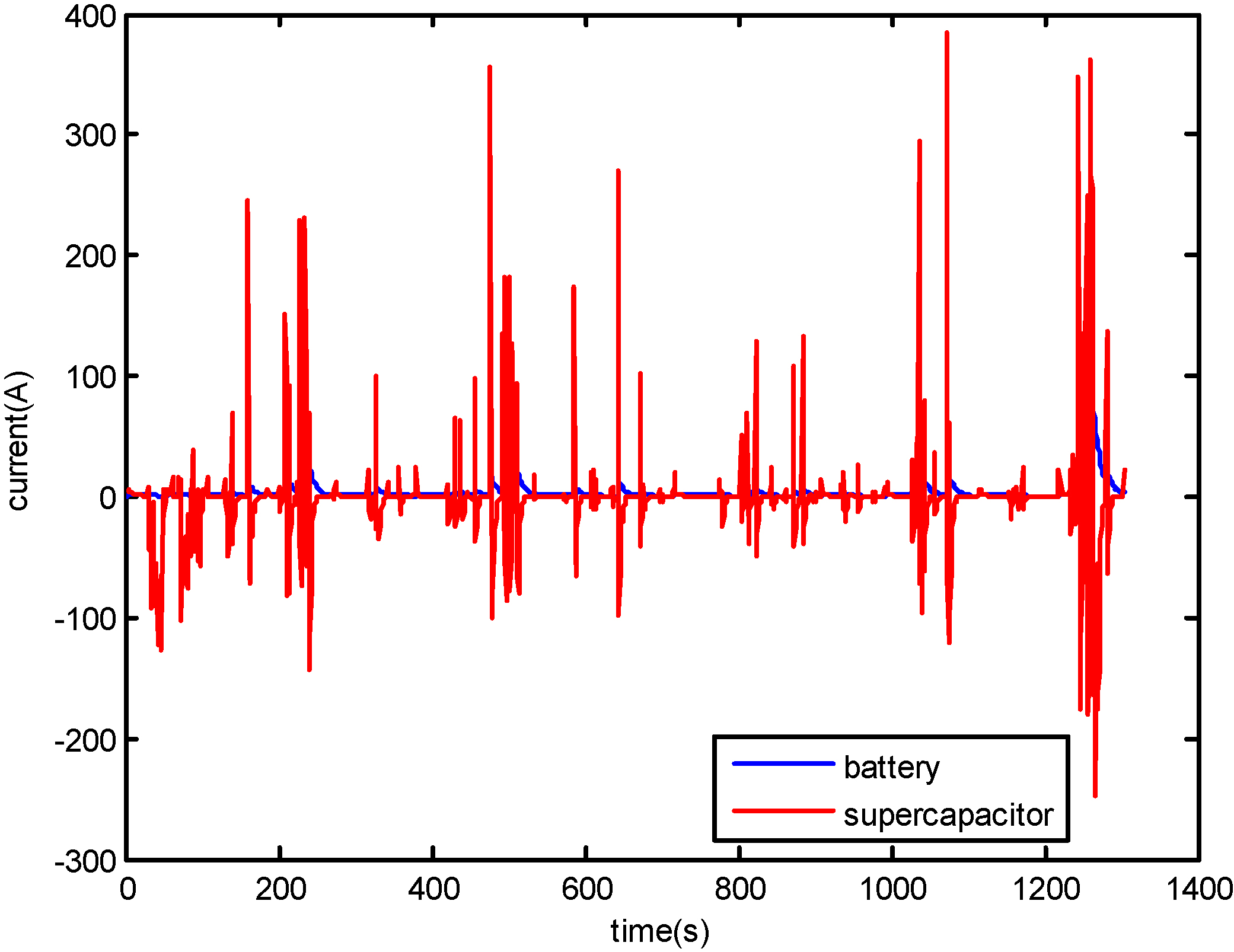
Current contrast diagram of battery and supercapacitors in compound power supply.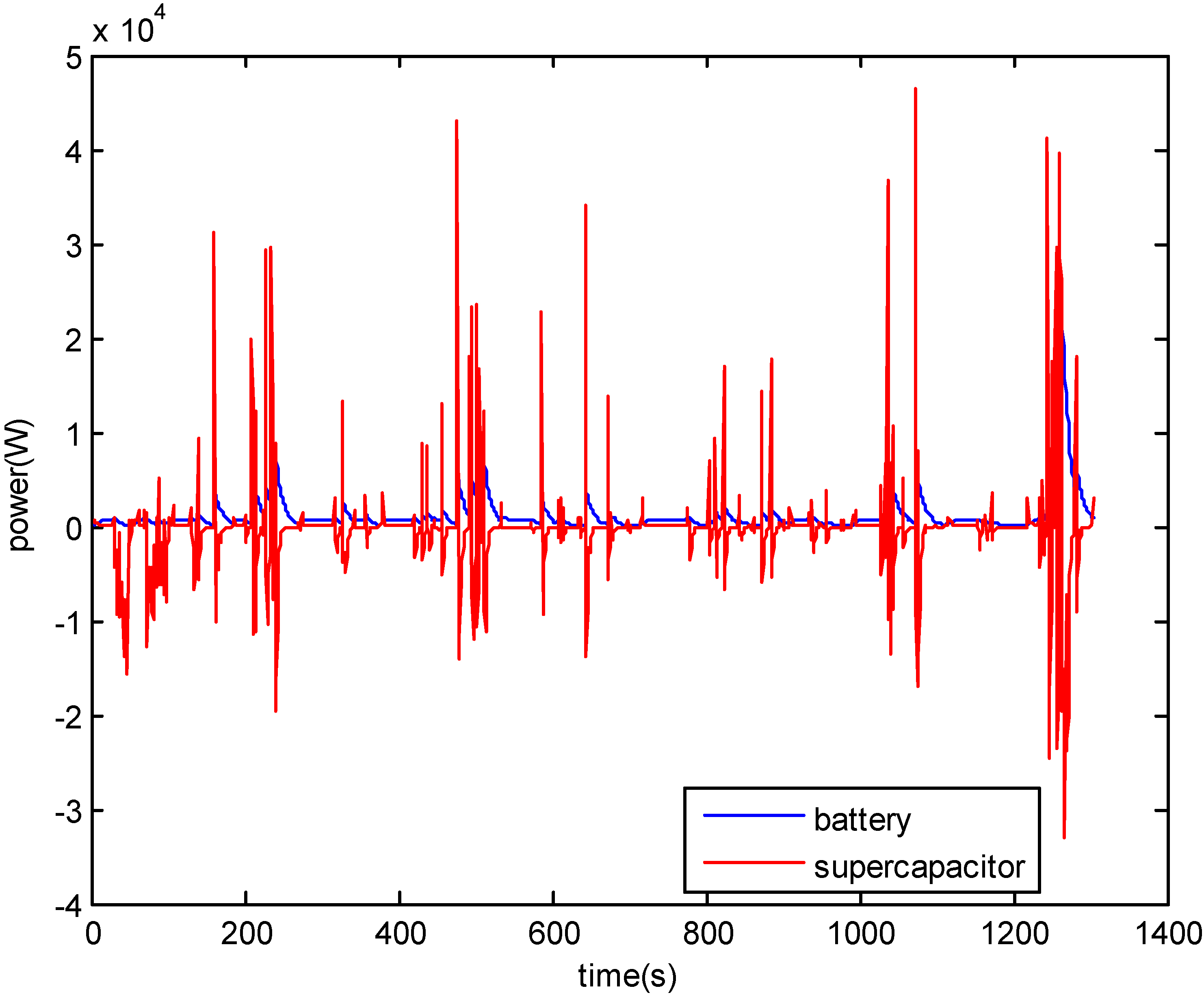
Figure 15 is a comparison chart of SOC of storage battery under the electric assist strategy and the fuzzy control strategy before and after optimization. Blue curve and red curve are the same as those in Fig. 11. The green curve is the SOC curve of storage battery under the optimized fuzzy control strategy. It can be seen from the comparison that the engine with optimized strategy concentrately works in the high torque region, charging the battery while satisfying the power performance of the vehicle, so as to ensure the charge-discharge balance of the battery. Therefore, the SOC of the battery after optimization changes more smoothly, only about 5.5% from the initial state to the termination state. It is indicated that the fuzzy strategy can better maintain the charge-discharge balance of the battery while ensuring the power economy, which is beneficial to providing power and energy for the motor.
SOC contrast chart of battery under electric assist strategy and fuzzy control strategy before and after optimization.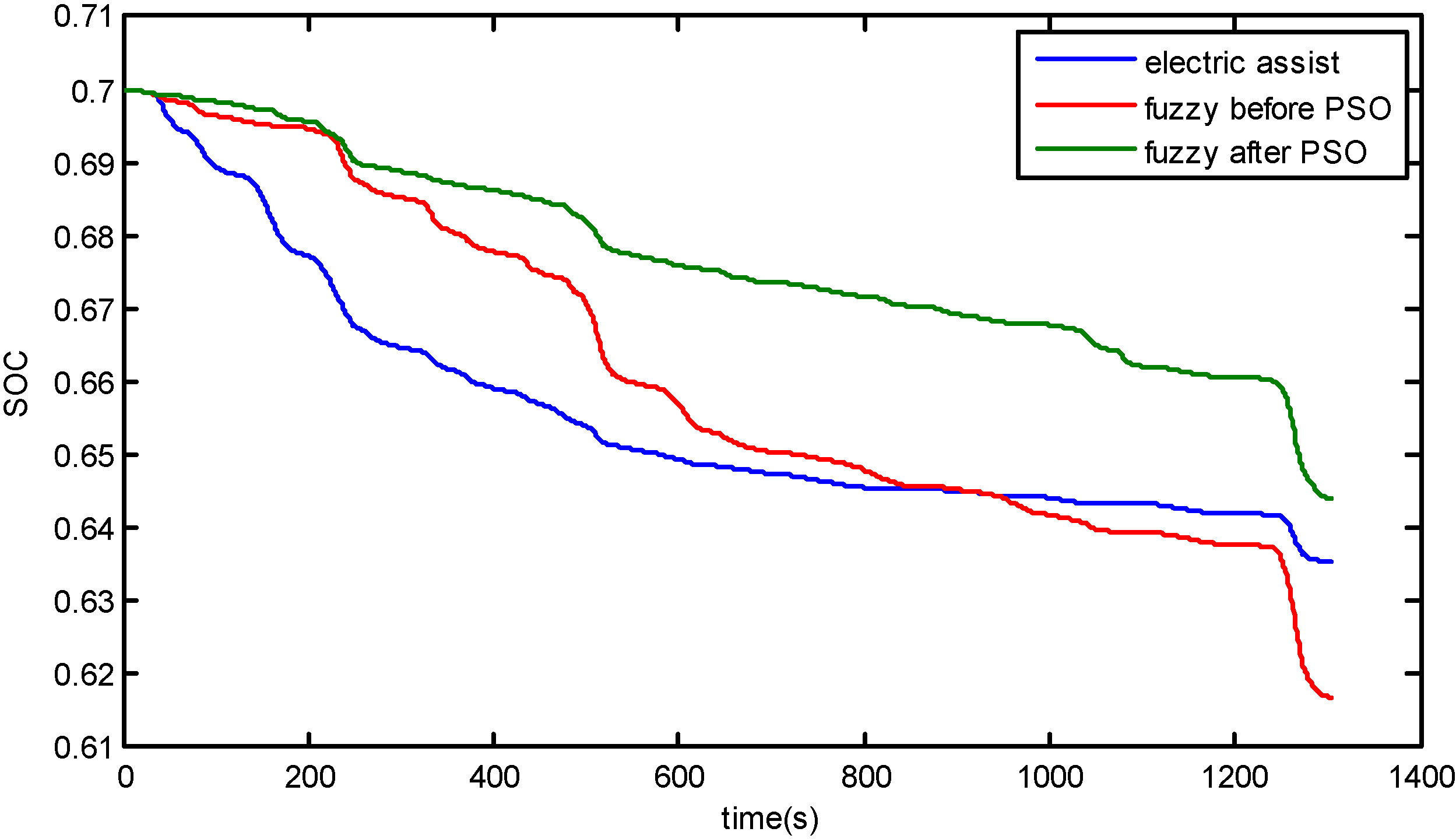
Figure 16 is a comparison chart of vehicle fuel consumption under electric assist strategy and fuzzy control strategy before and after optimization. The blue, red and green curves are fuel consumption curves correspond to electric assist strategy, fuzzy control strategy before optimization and fuzzy control strategy after optimization respectively. In the simulation, the fuel consumption of each step time is used as the evaluation criterion, and the unit is gal
Contrast chart of fuel consumption of vehicle under electric assist strategy and fuzzy control strategy before and after optimization.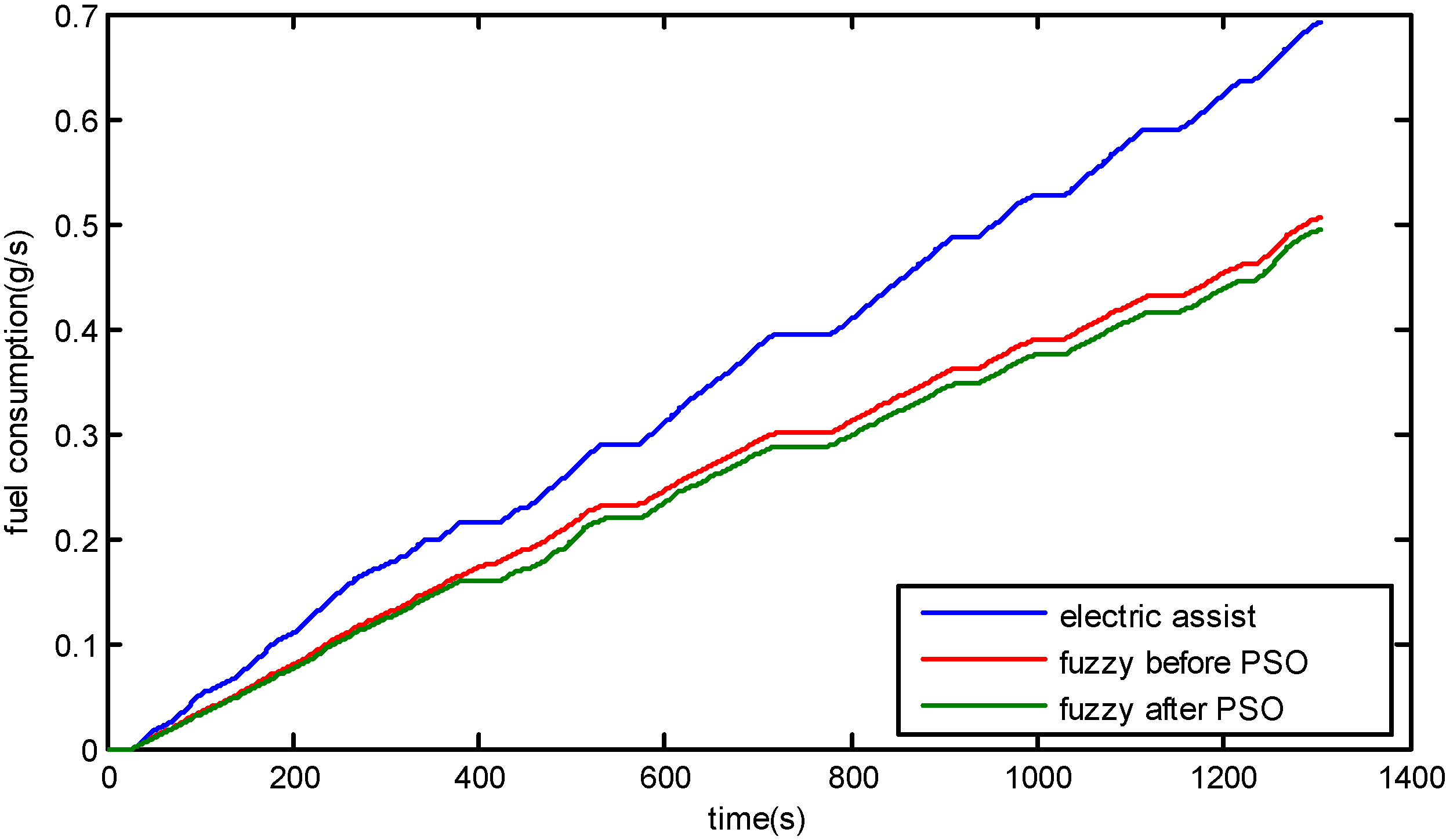
From the comparative analysis of Figs 10–16, it can be seen that the fuzzy control strategy of torque distribution based on PSO optimization of engine efficiency can be applied to hybrid electric vehicles with composite power modules, which can obviously improve the efficiency of engine and motor, ensure the charge-discharge balance of battery, and reduce the fuel consumption of the whole vehicle. It states that the PSO optimized fuzzy control strategy proposed in this paper is effective.
This paper designs a fuzzy torque distribution control strategy based on engine efficiency, on the basis of existing hybrid electric vehicles with compound power supply and on the premise of satisfying the dynamic performance of vehicles. Simulating under designated condition, the results show that the proposed fuzzy torque distributor based on engine efficiency can complete the torque matching between engine and motor, and meet the power requirements of hybrid electric vehicles. Compared with the original electric assist control strategy, it can make the engine work in the high efficiency areas; improve the efficiency of the engine. At the same time, it is conducive to the battery charge-discharge balance, and reduces fuel consumption on the premise of ensuring the performance of the vehicle unchanged, which is conducive to prolonging the life of the battery. The optimized fuzzy control strategy based on PSO algorithm can further improve the engine efficiency according to the working state of the vehicle. Compared with the experience-dependent fuzzy rules, the engine efficiency is higher, the SOC of the battery is more stable and the fuel consumption is lower. The feasibility and effectiveness of the optimized strategy are verified, which provides a basis for the energy control of hybrid electric vehicles.
Footnotes
Acknowledgments
This work was support by Major Scientific and Technological Achievements Conversion Project in Hebei Province (18042211Z) and Hebei Science and Technology Project (18212201D).