
Abstract
In order to solve these problems, this paper introduced the grey system theory (GST) method in the real-time application of intelligent traffic signal optimization (ITSO). In this paper, the deep Q-network (DQN) algorithm was used to realize the dynamic signal light setting of real-time traffic conditions, which can improve the overall operating efficiency of the traffic system, and the PPO (Proximal Policy Optimization) algorithm was used to solve the problem of the lack of real-time performance of the traditional traffic signal optimization methods. By comparing the traffic congestion index of S city before and after the application of the GST method, the paper found that the average one week before the application was 60.1%, but it dropped to 26.6% after the application. In the experimental test of average speed comparison, the speed after applying the GST method was generally higher than the value before application, and the overall speed increase was about 20 km/h. This paper emphasizes the importance of evaluating the robustness of the GST method, particularly in its ability to manage unexpected scenarios. The research concentrates on assessing four critical indicators: outlier handling, noise tolerance, handling missing data, and nonlinear coping ability.
Keywords
Introduction
With the expansion of urban road networks and escalating traffic congestion, traditional road traffic signal control technologies are increasingly revealing their limitations. In the face of complex, fluctuating traffic flows, diverse vehicle behaviors, and unpredictable real-world traffic conditions, conventional detection algorithms struggle to meet the demands of real-time traffic management. In this context, the GST method, known for its proficiency in handling uncertainties, holds significant potential for application in Intelligent Traffic Signal Optimization (ITSO). This approach promises to enhance the adaptability and efficiency of traffic control systems, offering a solution to the growing challenges in urban traffic management.
The development of intelligent transportation system (ITS) makes traffic signal optimization particularly important, and many scholars have been working on it for many years. Focusing on ITS and traffic signal optimization, Xu B proposed a real-time traffic signal control method based on deep reinforcement learning. He analyzes traffic data and real-time signal status to adjust the length of signal lights, thereby optimizing traffic flow and reducing congestion [1]. Wei H proposed a real-time traffic signal control method based on multi-agent reinforcement learning, and used intelligent agent system to conduct collaborative optimization of the entire traffic network to improve traffic efficiency and reduce emissions [2]. Neelakandan S designed a real-time traffic signal optimization method based on reinforcement learning and model predictive control (MPC). By learning the correlation between traffic state and signal control strategy, he adjusted the duration of signal lights in real-time scenarios to achieve the best traffic flow effect [3]. Zhou S used a real-time traffic signal optimization method based on deep learning and fuzzy control. By analyzing traffic data and environmental information, he adjusted the duration of traffic lights in real time to improve traffic efficiency and reduce energy consumption [4]. Guan Y proposed a real-time traffic signal optimization method based on multi-objective optimization. He used optimization algorithms to weigh among multiple targets to achieve the optimal traffic signal control effect [5]. While previous researchers have made strides in addressing the inefficiencies inherent in traditional traffic signal optimization methods, leading to effective reductions in emissions, a significant oversight remains in their work. They have not fully considered the real-time application of the GST method in Intelligent Traffic Signal Optimization (ITSO). This omission represents a major shortcoming, as the integration of GST could potentially revolutionize the effectiveness and responsiveness of traffic signal systems, adapting in real-time to the ever-changing urban traffic dynamics.
GST, known for its effectiveness in handling incomplete and sparse data, presents a valuable approach for enhancing traffic signal optimization. By applying GST principles, it’s possible to significantly boost traffic efficiency and the responsiveness of traffic systems to fluctuating conditions. This approach leverages the strength of GST in processing and making decisions based on limited data, enabling more agile and accurate adjustments to traffic signals, thus optimizing the flow and reducing congestion in urban traffic networks. Using GST, Kanagaraj N proposed a real-time traffic signal optimization method based on grey correlation analysis. Through correlation analysis of traffic data and signal state, he adjusted the duration of signal lights in real time to optimize traffic flow and reduce congestion [6]. Li J applied the GST to propose a real-time traffic signal optimization method based on grey prediction and control. Through gray analysis and prediction of traffic data, he realized real-time adjustment of signal length to achieve the goal of reducing congestion and improving traffic efficiency [7]. Using GST, Barodi A established a real-time traffic signal optimization method based on grey prediction and decision. Through gray prediction of traffic flow and signal state, he combined the decision algorithm to adjust the duration of signal lights in real time to improve traffic conditions and traffic efficiency [8]. Ouyang Z applied GST to design a real-time traffic signal optimization method based on grey prediction and collaborative control. Through gray prediction and collaborative control of traffic data and signal state, he adjusts the signal length in real time to optimize traffic flow and reduce congestion [9]. Using GST, Phan CT proposed a real-time traffic signal optimization method based on grey prediction and control. He used the traffic data of gray analysis and prediction to adjust the length of signal lights in real time, thereby reducing congestion and improving traffic efficiency [10]. The researchers applied GST to make grey predictions of traffic flow and signal state, thereby reducing traffic congestion and improving traffic efficiency. However, they have not solved the traditional problems of single-purpose and inflexibility.
As an effective mathematical model, GST can be applied to ITSO to improve traffic efficiency and reduce traffic congestion. This paper chooses to introduce this method into ITSO. In order to increase the overall traffic system’s operational efficiency, the DQN algorithm of deep reinforcement learning is employed in this research to implement dynamic signal light setting in real-time traffic conditions. The PPO algorithm is also utilized to address the issue of the classic traffic signal optimization techniques’ lack of real-time performance. In order to comprehensively consider multiple traffic benefit indexes, this paper adopts multi-objective optimization method. This is different from the traditional approach of focusing on a single goal. Employing a model-based predictive control algorithm allows for the anticipation of future traffic patterns. By refining this algorithm, the signal light’s duration and timing can be adjusted, leading to the implementation of a more adaptable signal optimization strategy. This approach facilitates dynamic adjustments in traffic management, optimizing signal timings in response to predicted traffic changes, thereby enhancing overall traffic flow efficiency.
Improving the relevant methods of traditional traffic signal optimization problems
DQN
Because the traditional traffic signal optimization is often set based on a fixed schedule or a fixed cycle mode, it cannot be dynamically adjusted according to the real-time traffic situation. This would lead to the signal cycle does not adapt to the actual traffic demand, resulting in traffic congestion or traffic flow imbalance. To solve this problem, this thesis decides to adopt the DQN algorithm in deep reinforcement learning, combined with real-time traffic data and traffic flow models. It learns the optimal signal control strategy by interacting with the environment, and realises dynamic signal setting based on real-time traffic conditions to improve the overall operational efficiency of the traffic system.
DQN is a method that combines deep learning and reinforcement learning to solve complex decision problems [11, 12]. In the dynamic semaphore setting problem, this paper would use DQN to learn the optimal semaphore control strategy. The basic framework of DQN algorithm is based on Q-learning algorithm, and its action guidance strategy adopts the mind strategy [13, 14]. In the solution, probability
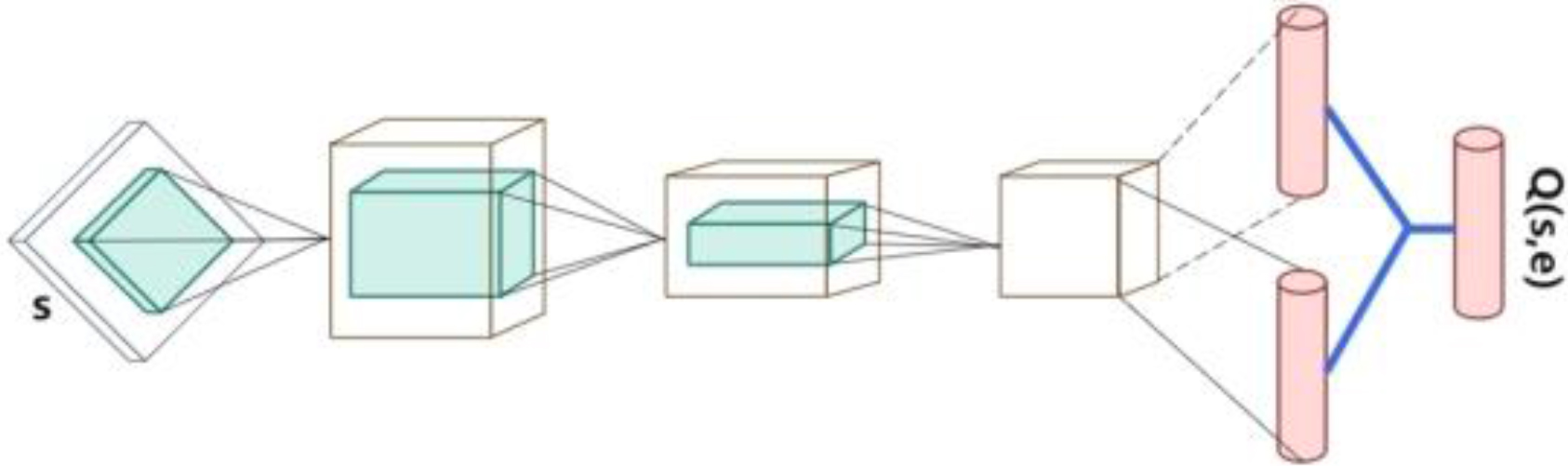
This paper used the PPO algorithm to solve the problem of the lack of real-time performance of traditional traffic signal optimization methods. Traditional methods are usually optimized based on historical data, which cannot obtain and process real-time traffic data in real time. This limitation leads to the lack of real-time and accuracy of the optimization algorithm, and it is impossible to adjust the duration of the signal light in time to cope with traffic congestion. These problems can be effectively solved by adopting the PPO algorithm [15, 16]. The PPO algorithm is a method to deal with the lack of real-time problem, and can make real-time decisions in real-time scenarios.
The PPO algorithm deals with the problem of lack of real-time performance by adjusting and updating the policy function in a short time to adapt to the real-time changing environment [17, 18]. According to the latest observation data and objective function, the algorithm would use optimization techniques to update the parameters of the policy function to seek better performance. Although there may be some delay in real-time processing, the PPO algorithm can adjust the strategy in a limited time and achieve better performance optimization through fast iteration and real-time decision making. The specific real-time traffic signal optimization flow chart of this algorithm is shown in Fig. 2, and its process is shown in ⟀–⟆ below.
Flow chart of near-end strategy optimization algorithm for real-time traffic signal optimization.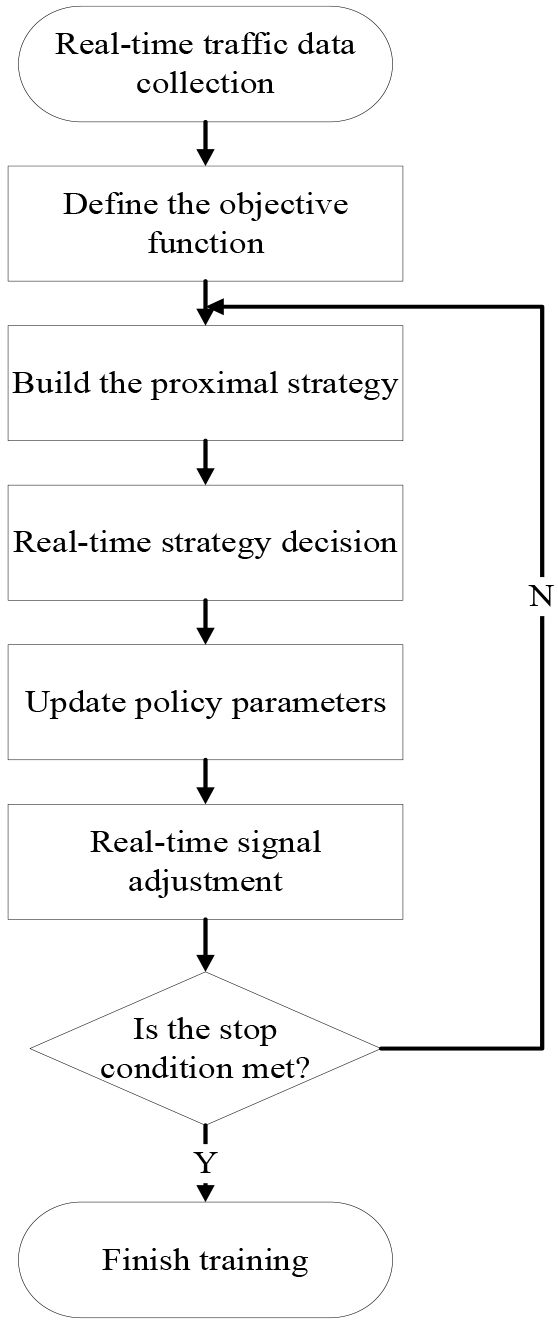
⟀ Real-time data acquisition is to collect real-time traffic data through sensors or other traffic equipment, including flow, speed, vehicle position and other information.
⟁ Define the objective function: According to the actual needs and traffic environment, an objective function can be defined to measure the performance indicators of the traffic system. In this paper, traffic delay is taken as the objective function to represent the delay of vehicles in the traffic network, and its function is
⟂ Build a PPO: A policy function with parameters can be introduced as a control policy to indicate the adjustment of the signal lamp duration and timing strategy. Its mathematical formula is as follows:
⟃ Real-time strategy decision: Based on the current traffic data and strategy function, the optimal control strategy can be calculated.
⟄ Update policy parameters: According to the results of the optimization algorithm, the parameters of the policy function can be updated. This allows the control strategy to be constantly adjusted to suit real-time traffic conditions. The update formula of parameter
In the above formula,
⟅ Real-time signal adjustment: According to the updated control policy parameters, it can adjust the duration and timing strategy of the signal lamp.
⟆ Determine whether the stop condition is met: According to the change of the policy function, when it changes little or within a certain range, it can be judged that the algorithm has converged and stop the training; If the conditions are not met, repeat the iteration, and it can repeat steps ⟂–⟅ to continuously optimize the real-time signal.
To solve the problem that the traditional traffic signal optimization method only considers a single objective, this paper adopts a multi-objective optimization method to comprehensively consider multiple traffic benefit indicators. Commonly used multi-objective optimization methods include genetic algorithm (GA), multi-objective differential evolution algorithm and multi-objective particle swarm optimization (PSO) algorithm. These algorithms obtain the optimal solution by setting a set of optimization objectives and balancing among different objectives [19, 20]. Compared with GA, multi-objective PSO algorithm has better convergence and can find better solutions while maintaining diversity. Compared with the multi-objective differential evolution algorithm, the multi-objective PSO algorithm has better global search capability and higher search efficiency [21, 22]. This paper selects the multi-objective Particle Swarm Optimization (PSO) algorithm to address the limitation of traditional traffic signal optimization methods, which typically focus on a singular objective. By employing this advanced algorithm, the research aims to simultaneously cater to multiple targets, offering a more holistic and efficient approach to traffic signal optimization.
The multi-objective PSO algorithm can comprehensively consider the tradeoff and balance of traffic benefit indicators and take into account multiple optimization objectives at the same time, thus improving the efficiency and service level of the traffic system [23, 24]. Firstly, this paper defines multiple objectives to be optimized. On the basis of the traditional single objective of improving traffic flow, three objectives are added: reducing traffic congestion, reducing the incidence of traffic accidents and reducing vehicle emissions. The specific process of the multi-objective PSO algorithm is as follows:
⟀ Initialize particle swarm: a group of particles can be randomly generated, and each particle is assigned a random position and speed. The position of particle
The formula for particle velocity is as follows:
⟁ Calculate the fitness value: according to the position of each particle, its fitness value in the target space can be calculated. The fitness function is as follows:
⟂ Update individual optimal solution: It is possible to compare the fitness value of each particle’s current position to the fitness value of the specific optimal solution.
⟃ Update the global optimal solution: Comparing the individual optimal solutions of all particles, the global optimal solution can be found.
⟄ Update speed and position: The speed and position of the particle can be updated. The position update formula for particle i is as follows:
The particle velocity update formula is as follows:
In the above formulas,
⟅ Termination condition judgment: according to the preset termination condition, it can judge whether the conditions for stopping the iteration are met. Common termination conditions include reaching the maximum number of iterations, convergence of the target value, etc.
By means of multi-objective PSO algorithm, multiple objectives can be considered at the same time when solving the traditional traffic signal optimization problem, and a set of approximate optimal solutions can be obtained. These solution sets can help decision-makers make tradeoffs and choices between different goals to achieve more comprehensive traffic signal optimization effects.
In contrast to the lack of flexibility in the traditional traffic signal optimization, this paper uses the MPC algorithm to predict the future traffic conditions, and adjusts the signal duration and timing scheme through the optimization algorithm to achieve flexible signal optimization. The MPC algorithm models the traffic signal optimization problem as an optimization problem and combines real-time traffic data for prediction, providing a more flexible signal control strategy [25, 26]. By establishing dynamic models of vehicle and traffic flow and updating model parameters with real-time data, MPC algorithm can predict the traffic situation in the future period. Based on this prediction, the MPC algorithm can calculate the optimal signal light phase and timing scheme to adapt to changes in real-time traffic conditions [27, 28].
Vehicle motion model based on MPC.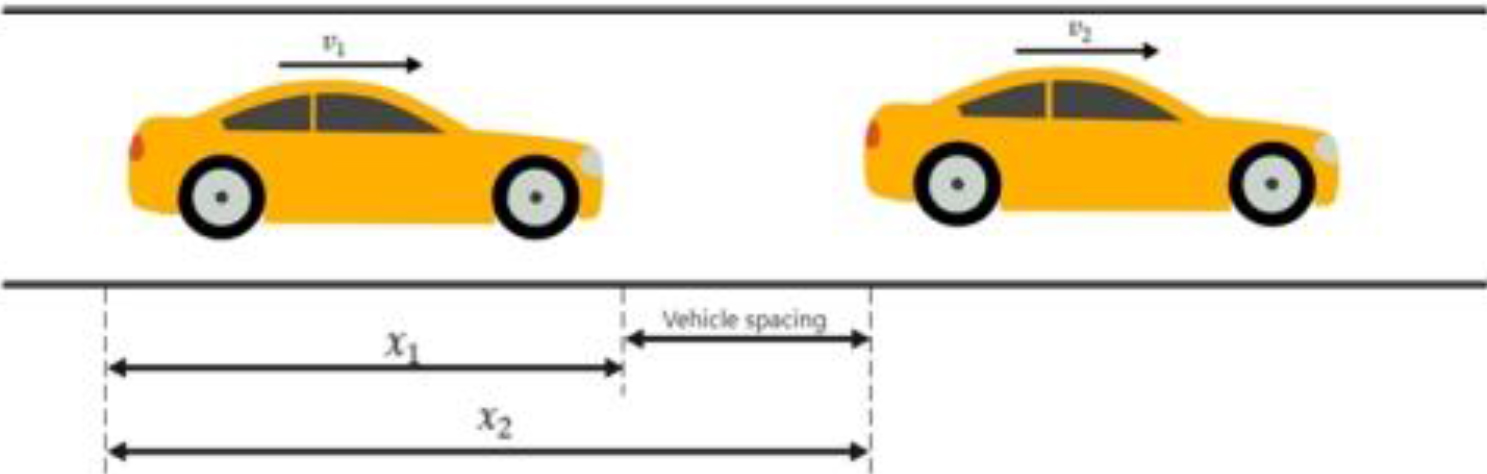
In this paper, kinematics of intelligent driving vehicles are analyzed in detail, and a vehicle motion model based on MPC is proposed. In this model, the main concern is the workshop distance between vehicles, that is, the distance between the heads of two adjacent cars in the same lane, as shown in Fig. 3. By establishing such a vehicle motion model, the behavior of intelligent driving vehicles on the road can be better understood and predicted, thereby improving the safety and efficiency of its driving for intelligent transportation.
According to the relative motion relationship between the two vehicles,
In the above formula,
Real-time data collection
As urban traffic issues grow more intricate, the ability to effectively gather and process relevant data becomes crucial for enhancing the reliability of urban road networks and boosting the efficiency of traffic operations. Efficient data acquisition and processing not only provide a clearer understanding of current traffic patterns but also enable more informed decision-making, leading to better traffic management and smoother flow on urban roads. In order to better understand the traffic conditions of S City, this paper collected the traffic conditions of S City from the public database and drew a simulated urban traffic simulation diagram (Fig. 4). It may gain a good knowledge of the traffic situation in S City by analyzing the traffic flow, speed, and vehicle kinds in S City. On this basis, combining the current situation of urban road traffic, this paper puts forward countermeasures and improvement measures for urban road traffic management. Table 1 shows the traffic data information collected in the public database of S City:
Traffic data of S City
Traffic data of S City
Traffic simulation diagram of S City.
Data source: The above is from the ministry of transport public data, the website is
G stands for gray; M stands for model, and GM(1,1) stands for the 1-order 1-variable model of the gray model. The model was built in the manner described below:
I: assume that the time series of traffic flow in City S is:
In the formula:
Ii: by using the first order single-variable differential equation to fit, a gray dynamic model of whitening form is obtained as follows:
In the formula,
Iii: determine the data matrix
Make
IV: the solution of the differential equation in whitening form is as follows:
V: restore the original data series predicted value.
The process of building the prediction model of grey system is to process the time series data of traffic flow without obvious rules first to make it a regular time series, and reduce the randomness of the original sequence through this processing process, so as to provide intermediate information for modeling. Then, the first order single variable differential equation can be used to fit the processed sequence and get the grey dynamic model. This model can be used to predict future traffic flow.
In traffic signal control, the traffic situation on the road is treated as the environment, and the agent is used to control the traffic lights. At each moment, the environment sends the agent the status information of the current moment, which contains a description of the current traffic environment, such as the number of vehicles, average speed, waiting time, etc.
In this scenario, GST is introduced to optimize traffic signal control. The GM(1,1) model is used to predict the historical traffic flow data. By grey forecasting the historical data, the traffic flow trend in the future can be obtained. These prediction results can be used as the input of ITSO model to guide the formulation of signal timing scheme. According to the state of the current moment and the current optimization strategy, the agent determines the best action through the prediction model of the grey system [29, 30]. The action is performed in the environment and generates an immediate reward. This reward can be defined and calculated according to the traffic conditions at the intersection and the optimization objectives. The ITSO model based on the GST is shown in Fig. 5.
ITSO model of S City.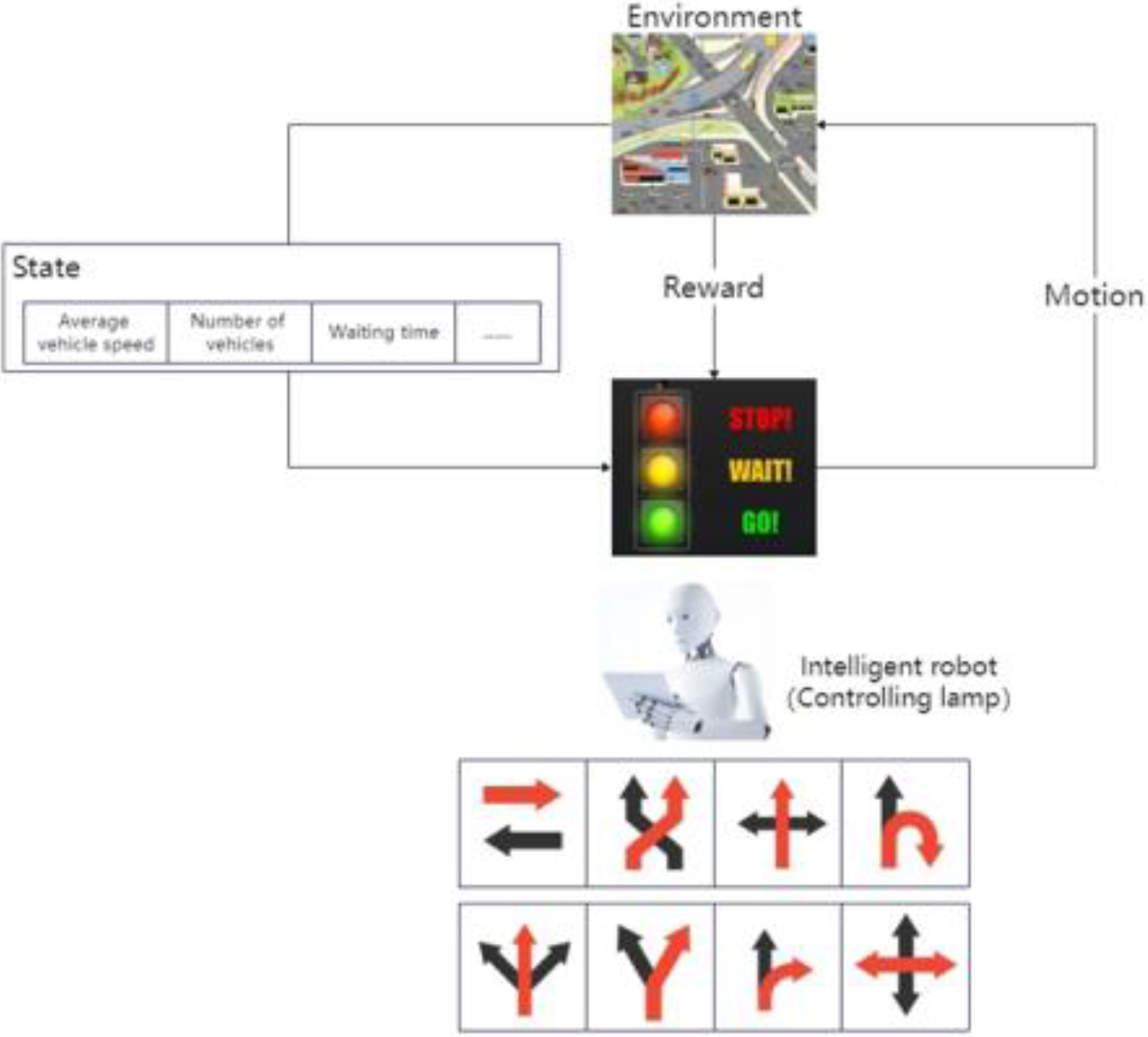
In summary, GST endows agents with optimization capabilities in traffic signal control [31]. By using the grey prediction model, the agent can decide on the optimal course of action based on the current state of the traffic environment in order to maximize traffic flow and intersection efficiency. The method provides a GST-based intelligent traffic signal control strategy that can adapt to real-time changing traffic conditions, thereby improving the efficiency and safety of road traffic.
Traffic flow optimization comparison
This study focuses on assessing the efficacy of implementing the GST method in optimizing traffic flow. To evaluate the impact, a comparative analysis of the traffic congestion index and average speed before and after the application of GST will be conducted. Given that traffic congestion is a prevalent issue in urban areas, optimizing traffic flow is pivotal for mitigation. Hence, this paper opts for the traffic congestion index and average speed as key metrics to provide an objective assessment of the improvements brought about by the GST method in managing traffic conditions.
(1) Comparison of traffic congestion
This paper aims to evaluate the effectiveness and performance of this method in traffic congestion analysis by comparing the traffic congestion index before and after applying the GST method. To this end, this paper simulated and collected the road traffic data of S City in the past week, and calculated the corresponding traffic congestion index based on the traditional statistical method. Then, it uses GST to model and forecast the traffic data in the same time period, and calculates the traffic congestion index based on GST. Figure 6 shows the comparison results of the traffic congestion index before and after application the GST method, where the horizontal axis is the number of days and the vertical axis represents the traffic congestion index (unit is %).
Traffic congestion index.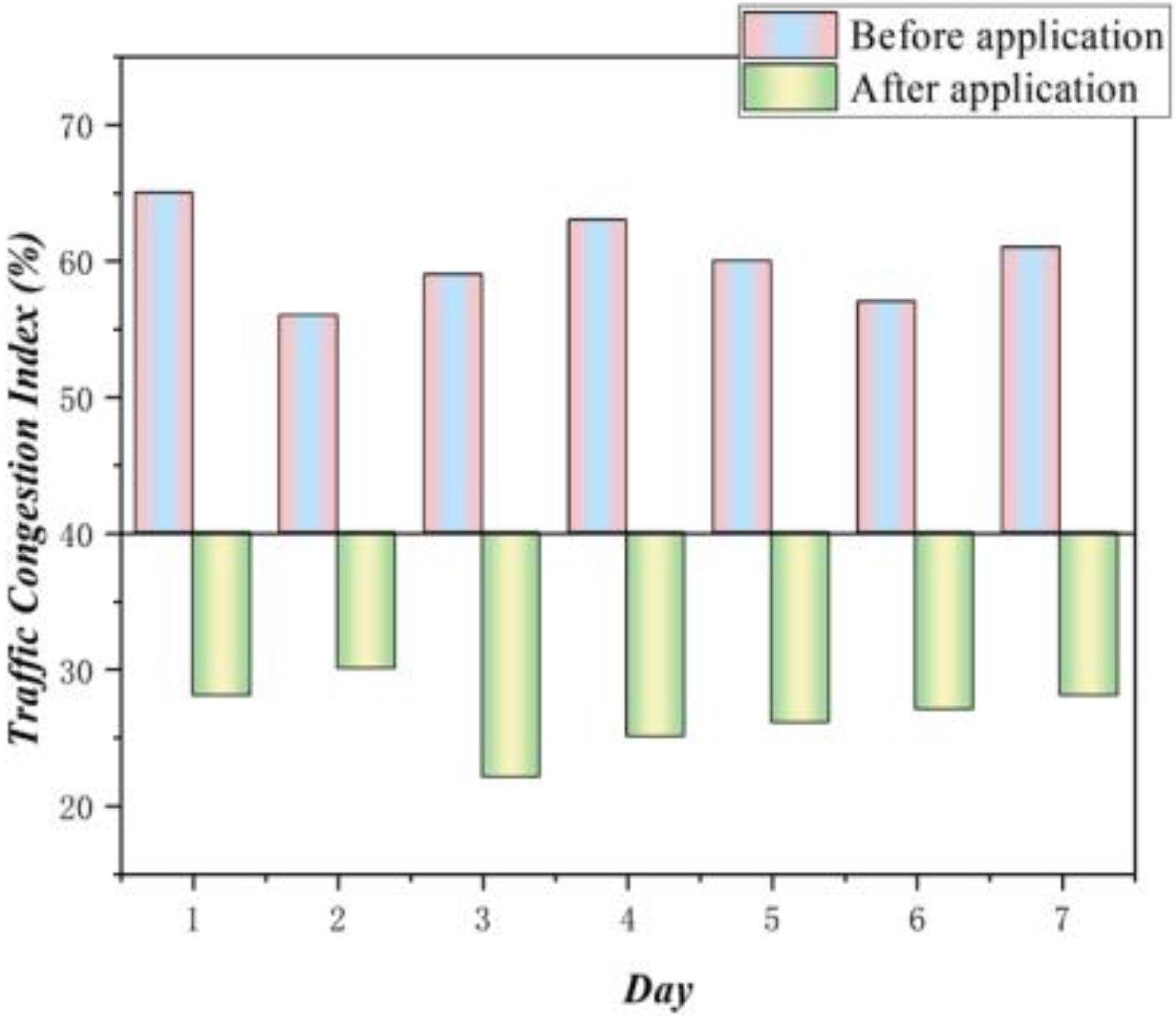
According to the data in Fig. 6, the traffic congestion index of S city before and after the GST method can be applied for further analysis.
Before applying the method of GST, the traffic congestion index of S City was 65%, 56%, 59%, 63%, 60%, 57% and 61% each day, and the average week was 60.1%. After applying the GST method, the daily traffic congestion index value dropped to 28%, 30%, 22%, 25%, 26%, 27% and 28% respectively, and the average weekly value was 26.6%. Through comparison, it can be seen that after applying the GST method, the traffic congestion index decreases obviously. This shows that the application of GST can effectively reduce the delay and congestion in the traffic system and improve the traffic fluency.
This can fully show that the application of GST plays a positive role in traffic flow optimization. Through the analysis and prediction of GST, it can better adjust the timing of traffic lights, optimize traffic route planning, so as to reduce traffic congestion and increase the average speed of vehicles.
(2) Average speed comparison
The rate at which vehicles travel along roadways serves as a critical metric for evaluating traffic flow and the level of congestion. When the average speed decreases, it often indicates the existence and aggravation of traffic congestion. To address this challenge, an experiment is conducted in which the GST method is used to predict and optimize the average vehicle speed. Based on the modeling and prediction of time series data, this method can better understand the changing trend and law of traffic flow. In the experiment, this paper collected 7 consecutive days of traffic data, including the average speed before and after applying the GST method. The experimental comparison results are shown in Fig. 7.
Comparison of average speed.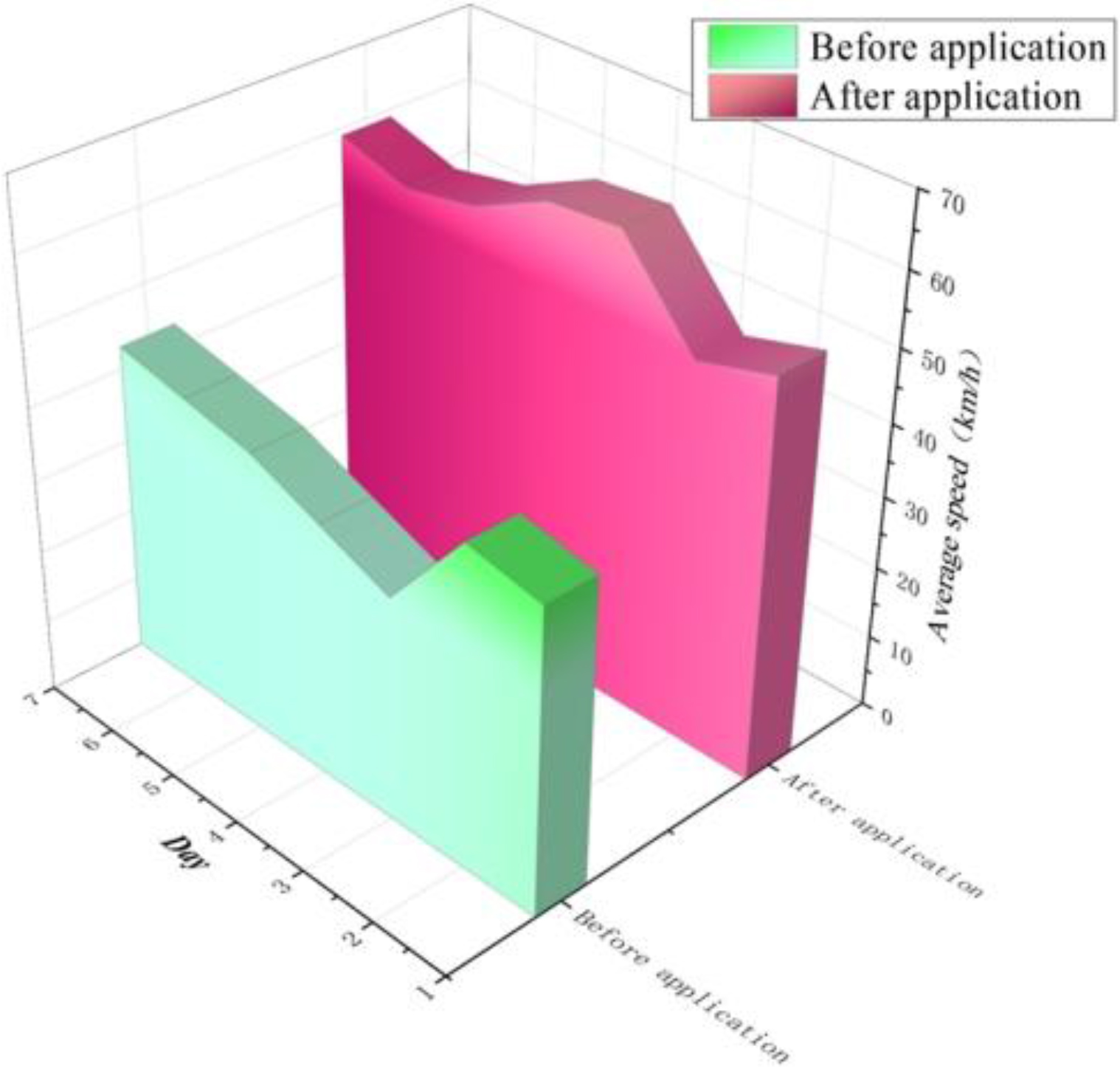
According to the data in Fig. 7, the average speed of S city before and after the GST method can be further analyzed.
Before application the GST method, the average speed ranged from 31 km/h to 44 km/h, and the overall fluctuation was large. After application the method of GST, the range of average speed increased significantly, from 52 km/h to 64 km/h. It can be observed that in the prediction result of average vehicle speed, the value after application the GST method is generally higher than the value before application.
Through comparison, it can be observed that after application the GST method, the average speed has shown obvious improvement and enhancement. This shows that the method is effective in the analysis and prediction of traffic congestion, and can help improve traffic fluency and reduce the degree of traffic congestion.
The time of pedestrians waiting for traffic lights on sidewalks is an important index to evaluate the efficiency of traffic signal system. When pedestrians wait too long, it can cause discontent and can lead to traffic jams and safety issues. In this context, an experiment is carried out to predict and optimize pedestrian waiting time by using GST. Based on the analysis and prediction of time series data, this method can better understand the changing trend and law of pedestrian waiting time. In the experiment, this paper collected the waiting time data of pedestrians at traffic lights within a period of time, and compared and analyzed the results before and after applying the GST method. The experimental comparison results are shown in Fig. 8.
Comparison of pedestrian waiting time.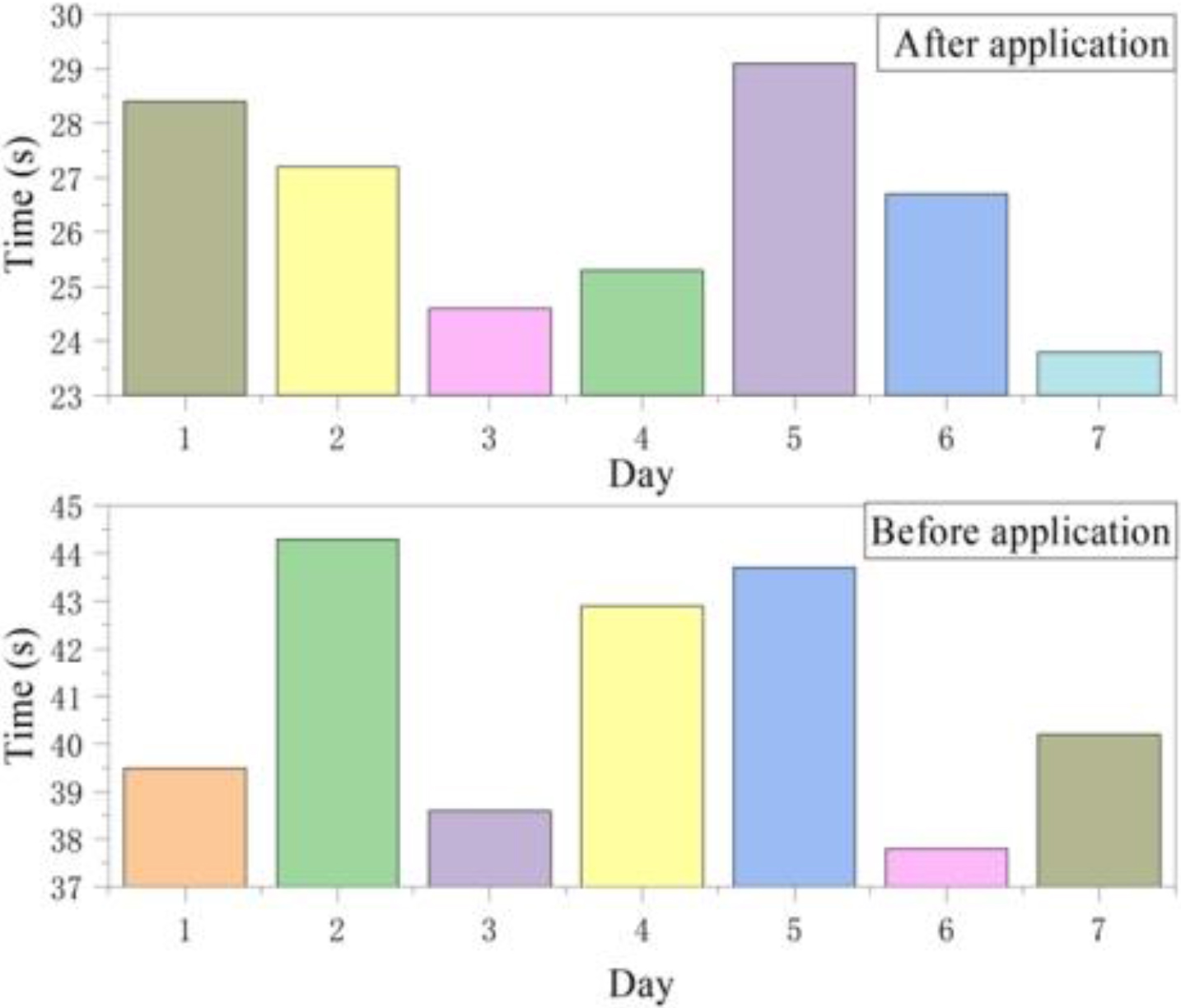
According to the data in Fig. 8, the time of pedestrians waiting for traffic lights on the sidewalks of S City before and after the GST can be further analyzed.
Before applying the GST method, the average time of pedestrians waiting for traffic lights fluctuated greatly, ranging from 38.6 seconds to 44.3 seconds, with an average time of 41 seconds. After applying the GST method, the pedestrian waiting time was generally reduced; the fluctuation range was smaller, from 23.8 seconds to 29.1 seconds, and the average time was shortened to 26.4 seconds. This can fully show that the application of GST has a significant impact on pedestrian waiting time at traffic lights. The pedestrian waiting time is reduced before and after application, which means that the GST method can predict and control the pedestrian waiting time more accurately, and improve the efficiency of the traffic signal system.
To sum up, the application of GST can effectively improve pedestrian waiting time at traffic lights, reduce pedestrian waiting time, and improve traffic efficiency. Therefore, in practical applications, using GST to control traffic signals can improve traffic efficiency and pedestrian travel experience.
In order to evaluate the robustness of applying the GST method to unexpected situations, this paper would introduce interference data and abnormal situation data for experimental comparison. In this experiment, this paper mainly compares the following four indicators: outlier handling, noise tolerance, handling missing data and nonlinear coping ability. By comparing the performance of the GST method before and after application, and evaluating the indexes such as outlier handling, noise tolerance, handling missing data and nonlinear coping ability, the robustness performance of the method in coping with unexpected situations can be more comprehensively understood. This is helpful to evaluate and improve the reliability and robustness of the GST method in practical applications. The specific experimental comparison results are shown in Fig. 9.
Robustness comparison.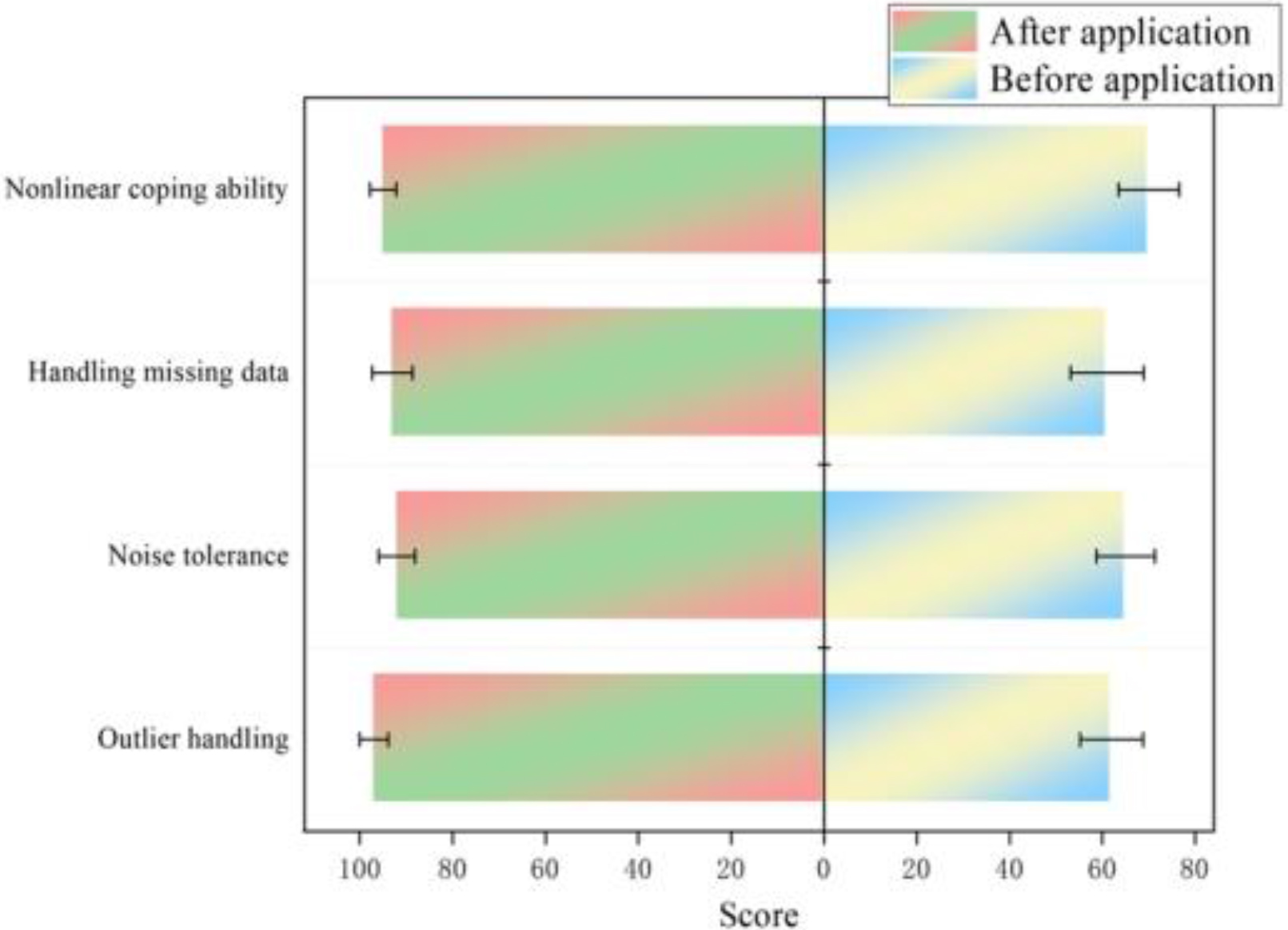
It can be seen from the data in Fig. 9 that the robustness before and after applying the GST method can be analyzed.
Before applying the GST method, the robustness index of outlier handling was 62%; noise tolerance was 65%; handling missing data was 61%, and nonlinear coping ability was 70%. After applying the GST method, the robustness index of outlier handling was 97%; the noise tolerance was 92%; the handling missing data was 93%, and the nonlinear coping ability was 95%.
Through comparison, it can be seen that after applying the GST method, all the robustness indexes have been significantly improved. This shows that the application of GST can effectively deal with outlier handling, noise tolerance, handling missing data and nonlinear coping ability. Specifically, the robustness of outlier handling has increased from 62% to 97%, and the noise tolerance has increased from 65% to 92%. Handling missing data increased from 61% to 93%, and nonlinear response increased from 70% to 95%.
The results show that this method is robust for data processing. By using GST to model and analyze data, outliers, noise, missing and nonlinear relations in data can be dealt with effectively, thus improving the stability and accuracy of the model.
In order to verify the real time performance of GST in practical application, GA and simulated annealing algorithm are introduced in this paper. By comparing the data processing speed and real-time prediction accuracy of the three algorithms, the effect of the GST method can be evaluated more comprehensively.
(1) Comparison of algorithm data processing speed
Data processing speed is one of the important indexes to measure the real-time performance of the algorithm. The method of GST has faster data processing speed because it uses differential equation model and statistical method to process and analyze the data. Compared with GA and simulated annealing algorithm, there are some problems such as large amount of computation and slow processing speed when processing massive data. Therefore, this paper evaluates the advantages of the GST method in real-time performance by comparing the performance of the three algorithms in data processing speed, and the comparison results are shown in Fig. 10.
Comparison of algorithm data processing speed.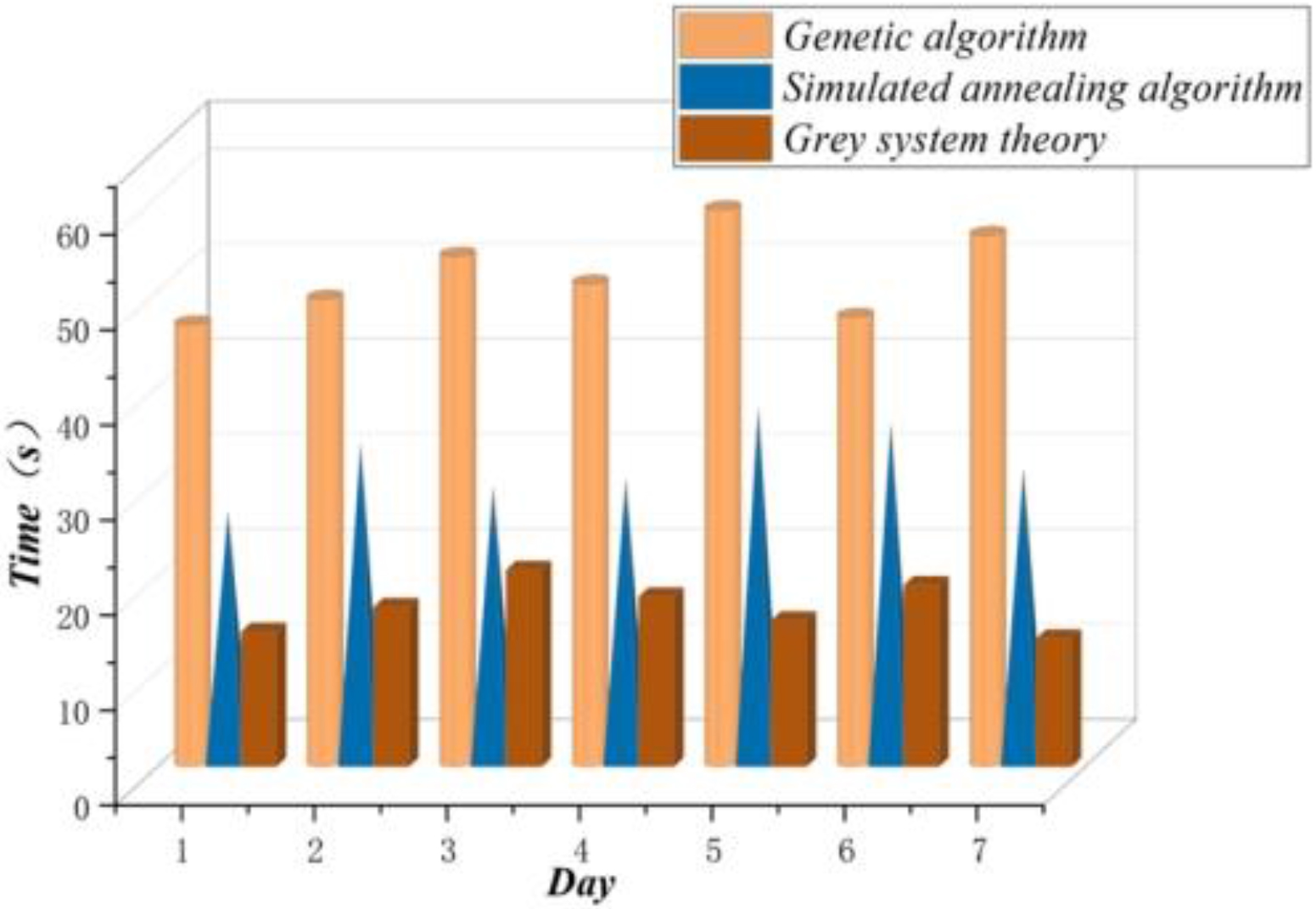
From the data shown in Fig. 10, the data processing speed of GA, simulated annealing algorithm and GST can be compared and analyzed.
The data processing time of GA fluctuated between 46.5 s and 58.6 s, and the average processing time was 51.9 s. The processing time of this algorithm is the largest fluctuation among the three. The data processing time of simulated annealing algorithm fluctuated from 26.3 s to 37.2 s, and the average processing time was 31.7 s. The data processing time of GST ranged from 13.5 s to 20.7 s, and the average processing time was 16.9 s. It can be observed that GST has better performance than GA and simulated annealing algorithm in data processing speed. The processing speed of GST is relatively fast, while the processing speed of GA and simulated annealing algorithm is slow.
To sum up, the data processing speed of the GST used in this paper is much better than the other two algorithms, and it has better performance in real-time data processing.
(2) Accuracy of real-time prediction of the algorithm
In order to verify the accuracy of the algorithm in the real-time prediction task, three algorithms, GA, simulated annealing algorithm and GST, are compared experimentally. It aims to compare the accuracy performance of these three algorithms in real-time prediction tasks, so as to select the most suitable algorithm for real-time prediction. By measuring and comparing the real-time prediction accuracy of the algorithm, the performance of the algorithm can be evaluated, and the decision basis can be provided for practical application. The following paper would give the analysis and discussion of the results, and the comparison results are shown in Fig. 11.
Accuracy of real-time prediction of the algorithm.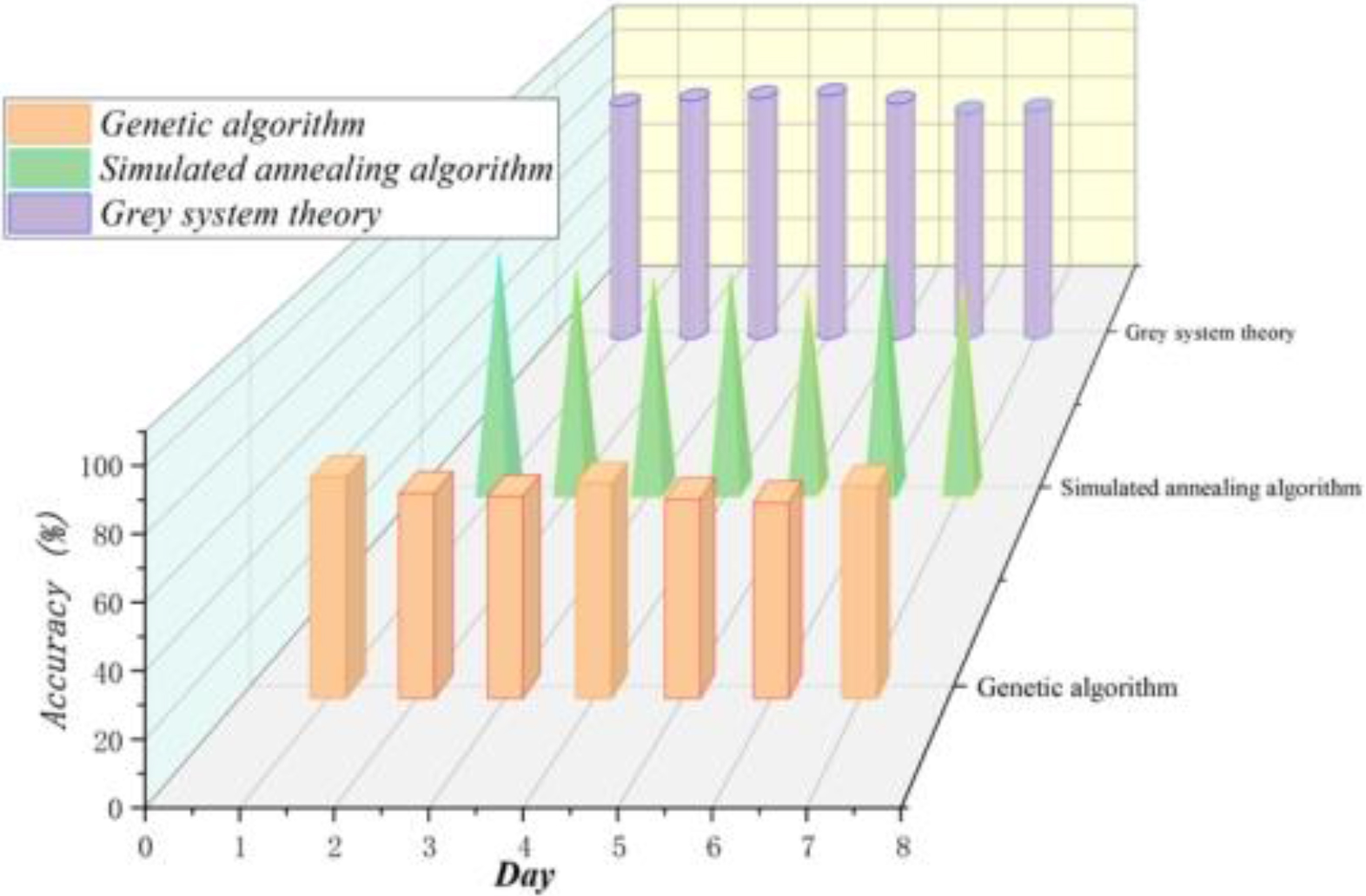
According to the data shown in Fig. 11, the data processing speed of GA, simulated annealing algorithm and GST can be compared and analyzed.
By comparison, it can be observed that in terms of real-time prediction accuracy, the GST shows the highest accuracy level, with an average accuracy of 93.7% and a maximum accuracy of 97%. This is followed by the simulated annealing algorithm, which has an average accuracy of 77.1% and a maximum accuracy of 84%. The GA showed a low level of real-time prediction accuracy, with an average accuracy of 64.6% and a maximum accuracy of only 69%.
This shows that the GST has a high accuracy in real-time prediction, followed by simulated annealing algorithm, while the GA has a low accuracy in real-time prediction.
This research focuses on developing an Intelligent Traffic Signal Optimization (ITSO) method grounded in the principles of the GST. By harnessing real-time data acquisition and processing, the study has crafted an ITSO model that integrates GST methodologies. This model is specifically tailored for the adjustment and optimization of real-time traffic signal control strategies. The ultimate aim of this model is to realize the objective of optimizing traffic signals, thereby enhancing the efficiency and fluidity of urban traffic management. This paper conducted a series of experimental tests, and the experimental results showed that the method based on GST can effectively reduce traffic congestion and improve traffic efficiency and travel experience. However, the research in this paper still has some limitations, and future work can further improve the model and algorithm, expand the application field, and achieve a more efficient and ITS by integrating with other intelligent transportation technologies.