
Abstract
Present work introduces a most popular evolution based algorithm and application of two degree of freedom proportional integral Derivative (TDOFPID) Controller based multi area power system. Differential Evolution (DE) optimization technique is applied here to tune the TDOFPID gains. Each area consists of Automatic generation control with addition of non-linarites. In this model time delay, Generation rate constraints (GRC) and reheat turbine are added to introduce non-linearity. At first attempt simulation is being done in two areas with DE optimization technique. Further a series connected Flexible Alternating Current Transmission (FACT) device such as interline power flow controller (IPFC) is included into the system and simulated. DE is also used to get the optimum value of TDOFPID controller having Integral time absolute error (ITAE) as the objective function. At last robustness analysis is done with varying parameter and different loading conditions. It is seen that, TDOFPID with IPFC gives better response compared to others.
Keywords
Nomenclature
R1, R2 and R3, R4 regulating parameter of area-I and area-II
β1 and β2= frequency bias parameter of area-I and area-II
Tg1, Tg2 & Tg3, Tg4 Stand for speed governor time constants in sec of area-1% area-2 respectively.; Tt1, Tt2 & Tt3, Tt4 Stand for turbine time constants in sec of area-1% area-2 respectively
ΔPD1 and ΔPD2 are step load change of area-I and area-II
ΔP tie is the tie line power deviation?
TP1 and TP2 are the power system time constant of area-I and area-II respectively in Sec.
T12 stand for synchronizing time coefficient in Sec.;
ΔF1 and ΔF2 stand for frequency change in area-I and area-II respectively in HZ.
Introduction
Nowadays, Automatic generation control (AGC) has been a significant part in the power system intended for retaining uninterrupted amount of power within allowable range to all regulars in the system. Automatic generation control (AGC) will maintain system equilibrium among power generation and load demand. If the load changes abruptly in any area-I or area-II, the system frequency and tie line power deviates from marginal value. This deviation must be adjusted with best quality and is achieved by AGC [1]. Presently a lot of companies are providing good quality of power with lower rate of tariff and continuity of power supply is considered as important. So AGC plays the key role in power system to provide better quality of power to all consumers. In the open energy, based market generation companies (GenCos) could conceivably take part in AGC problem.
However, a distribution companies (DisCos) may agreement exclusively through a GenCo or an independent power producer (IPP) meant through supply power for its own area or other areas. Many researchers have been studying; the AGC problem with different control technique to stabilize the frequency based deviation & changes the tie line power with in their limit during normal and perturbed conditions. The different control strategies are conventional [2] and optimal control [3] are applied in AGC problem. Because of the poor response of the governor and IPPs the classical controllers are ineffective to lessen the frequency deviation. Hence damp out the oscillation is distinctly challenging and incredibly expected in the prospective focused market. Therefore, optimized control design [4, 5] is vital in AGC for balancing the constraints such as frequency & tie line power. FACTs devices plays a major role in power system [6]. FACTs controllers are used to improve the flexibility of power transmission. In this present study Interline power flow control (IPFC) is added to the system. IPFC is a series connected FACTs controller to damp out oscillation of multi area power system.
From literature study, the behavior of the two-area power system is governed by the controller arrangement and different optimization techniques to tune the controller gains [14]. This article based on differential evolution (DE) is engaged to optimize the gain of the controller. Then the optimal value of PID controller is applied in interconnected system to get the better performance as compared to others. As above, new optimization technique i.e. differential evolution (DE) is applied to tune the parameter value for the AGC two-area power system in addition with Generation Rate Constraints (GRC) and time delay. DE is applied to pursuit the optimum value of TDOFPID controller having ITAE as objective function. At first attempt the dynamic performance is measured without IPFC controller. Next attempt IPFC is employed in series with tie line to enhance the dynamic response of the interconnected system. Finally, robustness analysis is done by means of diverse loading and varyingparameter.
System under study
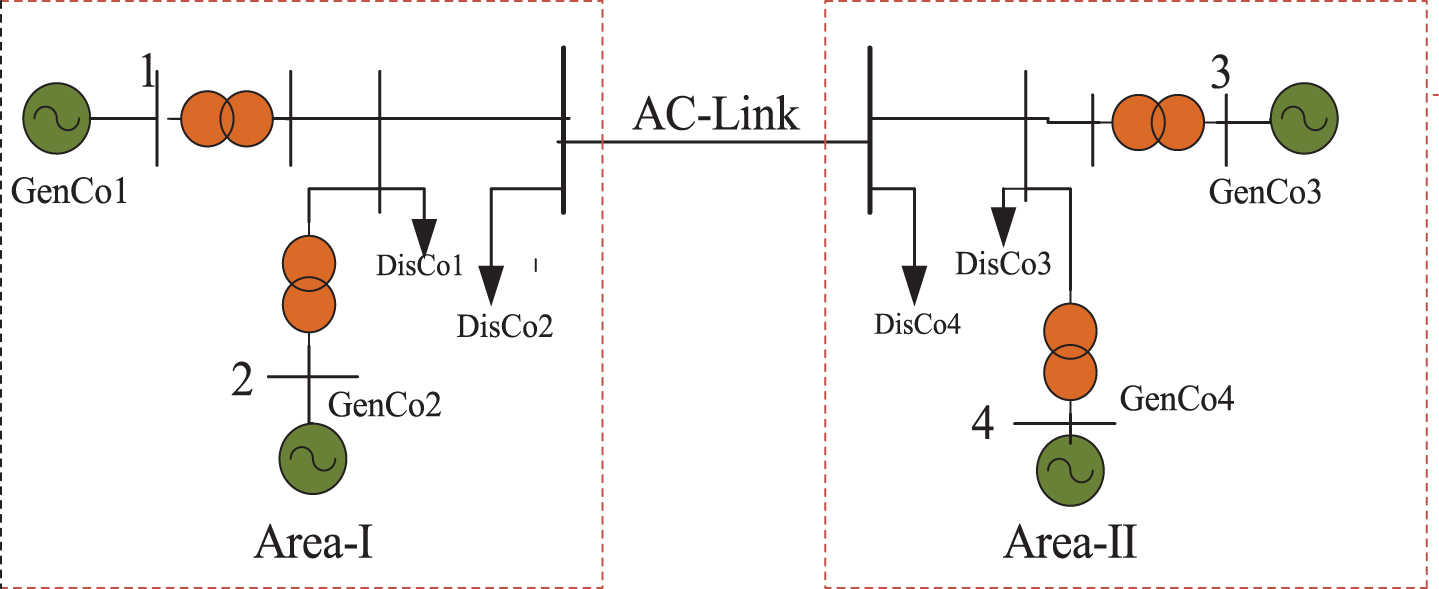
This paper proposes a design model of AGC system having two area diverse sources with GRC, time delay and reheated turbine is depicted in Fig. 1. Both the area-I and area-II consist of two numbers of GenCos and two numbers of DicCos with same non-linarites. A PID and TDOFPID control are used to improve the system performance.
Two area GenCo and DisCo model.
In a deregulated environment, GenCos and Discos made many agreements among themselves. There are mainly three cases of agreement such as: base case, bilateral case and violation case. If the participation involved in between DisCos and GenCos is equal in each area then it is treated “Base case”. If the participation in between DisCos & GenCos is other area, it is called as “Bilateral case”. If the participation of contracts violates the agreement then it is called as “Violation case”. All contracts can be represented in form of matrix which is known as DICSO participation matrix (DPM) [7, 8]. In this study, the idea of the DPM comprises of interconnection two-area AGC system to integrate the “base case”, “bilateral case” and “violation case”. The DPM provides the much-needed degree of utilization of DisCo from GenCo.
DPM is a 4×4 matrix, the row signifies the Genco and column signifies the DisCo. In an interconnected power system, each coefficient of DPM matrix can be measured as portion of load contacted by jth DisCo towards the ith GenCo. Hence it is called “contract participation factor” (CPM).
The DPM can be written as
The scheduled tie line power can be written as given as
Actual tie line power can be written as
Any instant of time error in tie line power has been given by
From the
In this model, each area has two GenCOs. Area Control Error (ACE) signals must be dispersed between them in extent to their participation in the AGC. Here ACE participation factor (apfs) are defined as the coefficient that allocate the ACE to GenCOs. In each area of system, the sum of participation factor is equal to one. Thus, the ACE participation factor, apf11, apf12 are taken for area-I and apf21, apf22 are taken for area-II. Finally, for the proposed work, both areas have same value of gain of the controllers and the frequency biases.
TDOFPID controller
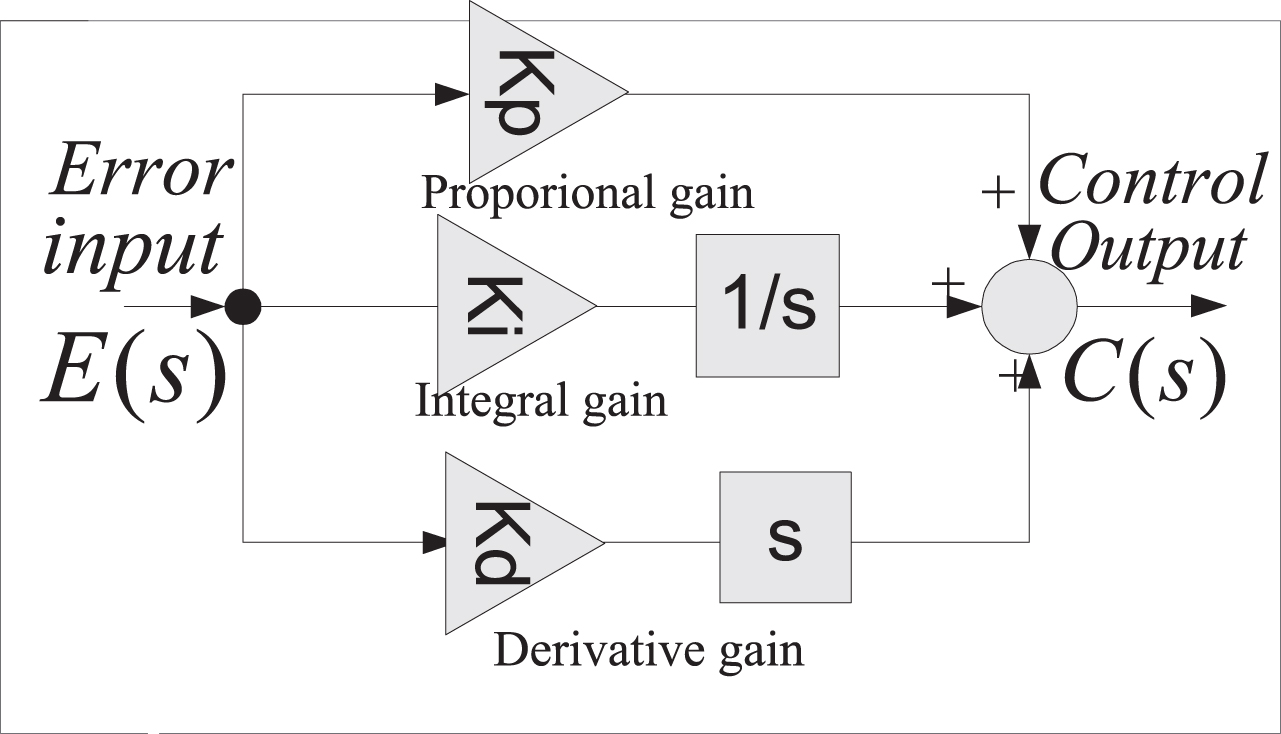
The two degree of freedom PID (TDOFPID) controller provides an additional 2 degrees of freedom then PID controller [9]. The controller simplifies the integer order PID controller and offers an expansion from the purpose to a plane. This extension provides a lot of flexibility in PID controller design. The block diagram of TDOFPID controller is shown in Fig. 3
The controller transfer function is given as
It is clear from equation (7) that, by selecting λ= 1 and μ=1, a classical PID controller can be considered. All these classical types of PID controllers are special cases of the PI λ D μ controller.
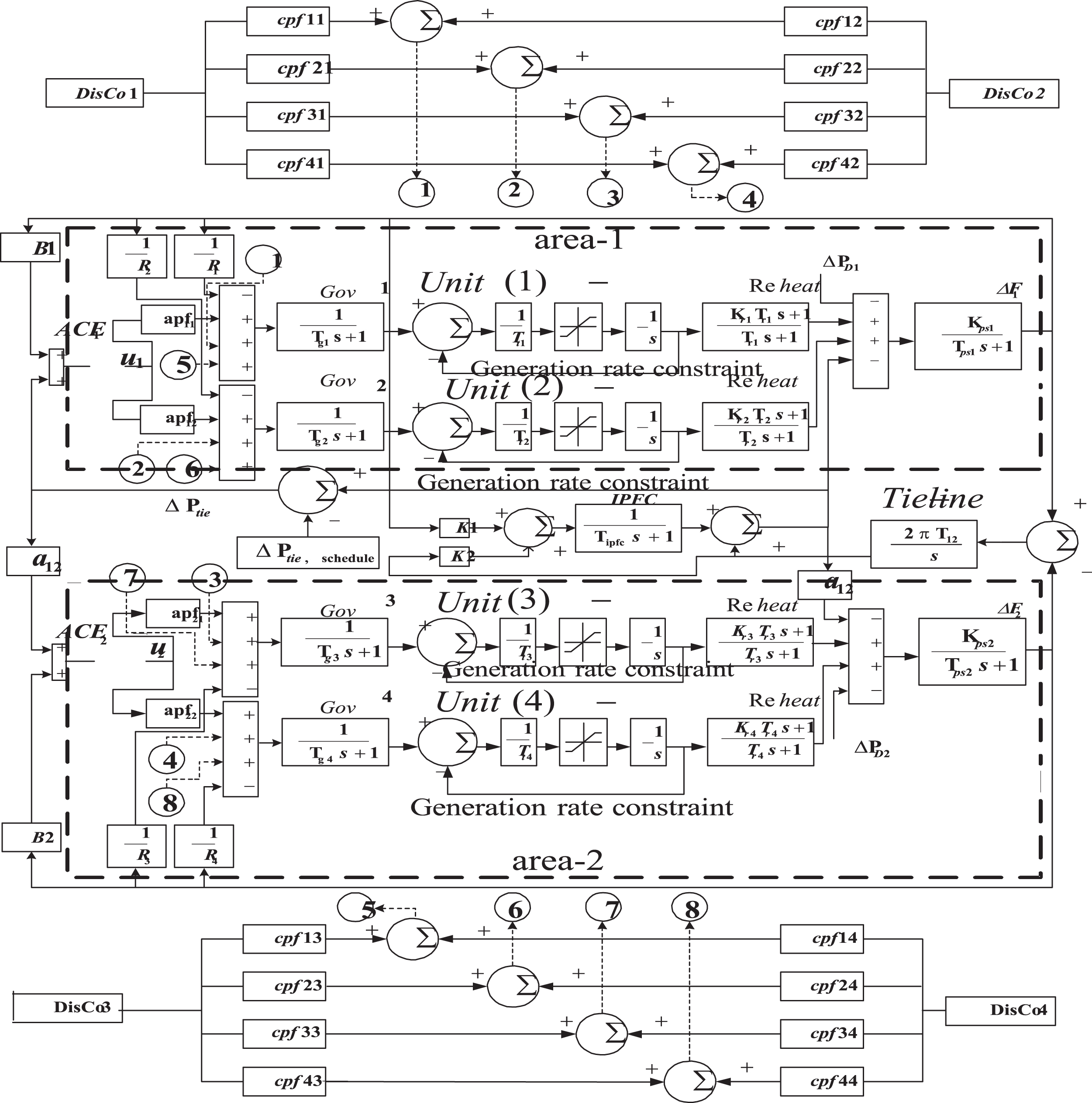
Two area deregulated power system having IPFC.
TDOFPID controller.
The objective function is initially characterized when an optimization technique is applied to the system. Overall performance standards are normally considered in the control design. In the Design of controller, some standard errors are measured such as integral time multiplied absolute error (ITAE) integral of time multiplied absolute error (ITAE), integral absolute error (IAE), integral square error (ISE) & integral time multiplied square error (ITSE) to check the system performance. Here, integral of time multiplied absolute error (ITAE) is treated as objective function of the proposed system. The advantage of this objective function is to reduce the settling time and overshoot. Hence ITAE is the better option to choose the objective function [10] and to optimize the gain of the controller i.e. KP, KI, KD.
Where tsim is the simulation range in sec Δ F1 is the change in frequency in Hz in area-I, Δ F2 is the change in frequency in Hz in area-II, Δ P tie is the tie line power deviation.
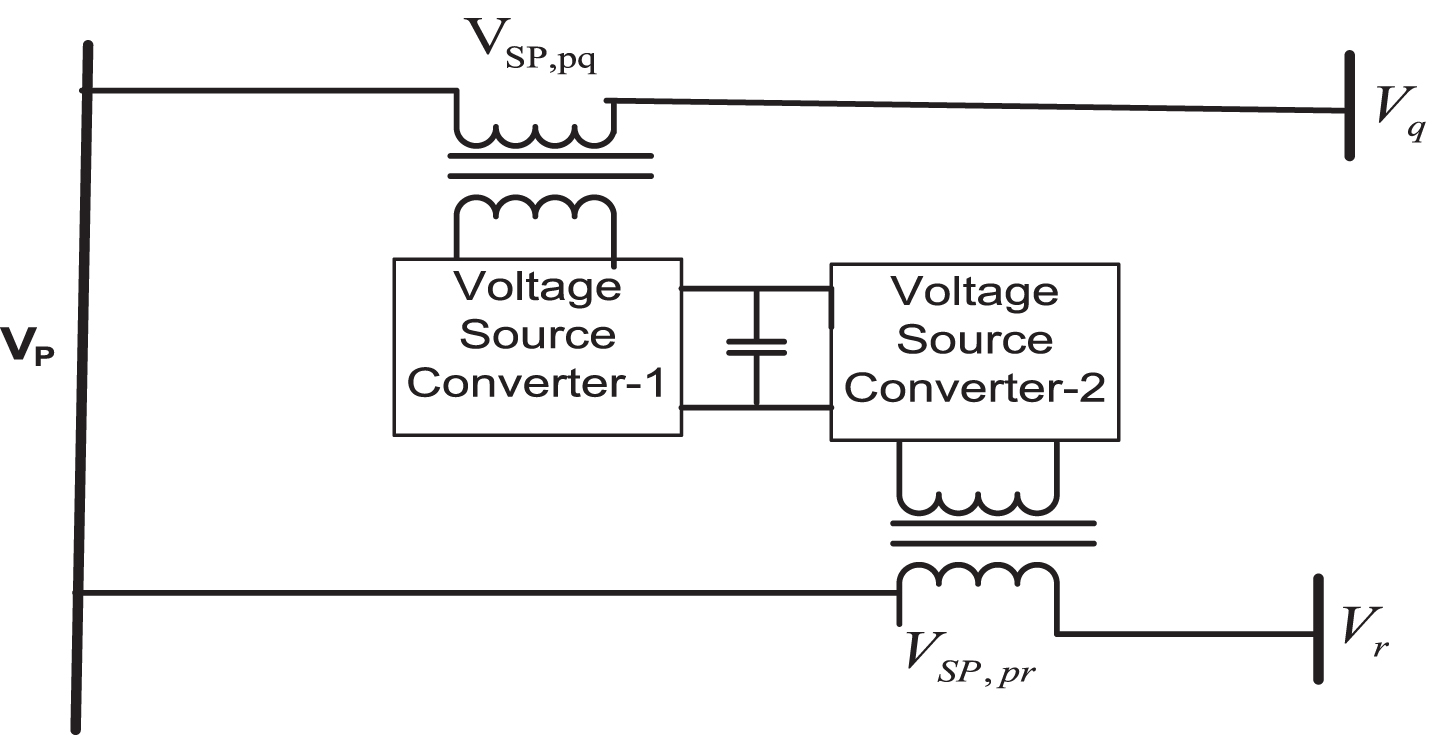
Modern development of FACTs exploration [4] must prompted to another device called Interline Power flow controller (IPFC). This FACTs controller comprises two or more series connected converters working together in association with two area power system gas been presented in Fig. 4. IPFC is a series connected FACTs device, which is connected in series with tie line of two area power system. This has been used for compensating reactive power, capable of control of power flow, enhance the transient stability and damp out the oscillation [5, 11]. The block diagram of IPFC controller is shown in figure. IPFC is an arrangement of two or more static synchronous series compensator (SSSC) that connects via common DC link. The main purpose of this controller is used to control the power flow and to decrease the system oscillation. The IPFC gives better solution than UPFC because of economical and stability point of view [12]. Consequently, strategies that can be easily transfer the power among the converter with DC common links. The equivalent circuit diagram of IPFC is shown in Fig. 4. In Fig. 4, VP, Vq and Vr are the bus voltages for p, q and r bus respectively.
The apparent power at the receiving end of the line as
Where V i V j V k are the comples bus voltages concerned with the buses i, jk respectively. V sein Z sein are the complex controlled series injected voltage and series coupling transfer impedance respectively. When IPFC acts as a current source, then the active and reactive power can be calculated easily. The proposed work, the effectiveness of IPFC with FA based PID controller is measured and simulated with power injection model. The dynamic performance of the two-area system is measured and compared against IPFC & without IPFC during steady state.
Equivalent diagram of IPFC.
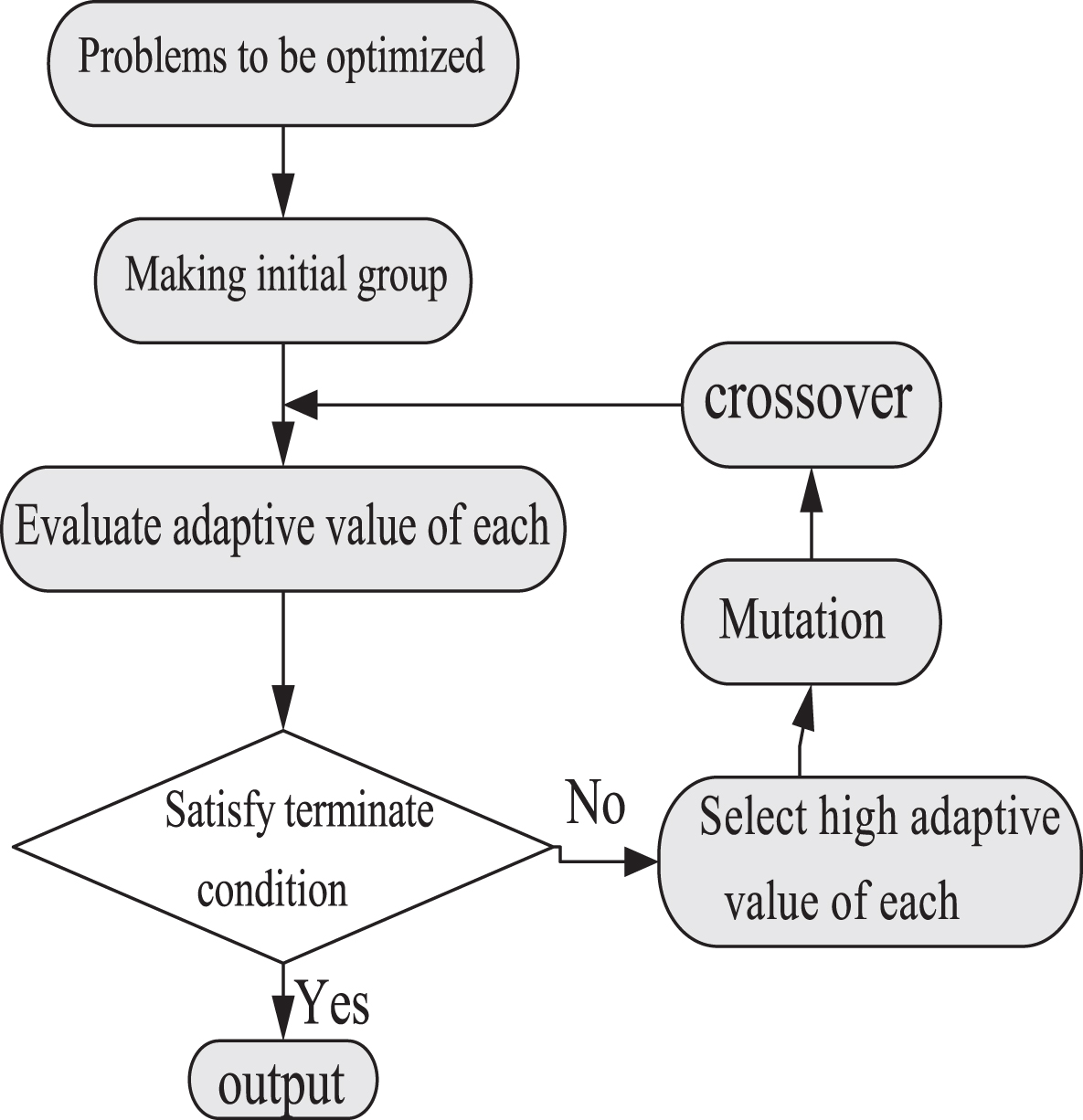
Flowchart of Differential Evolution.
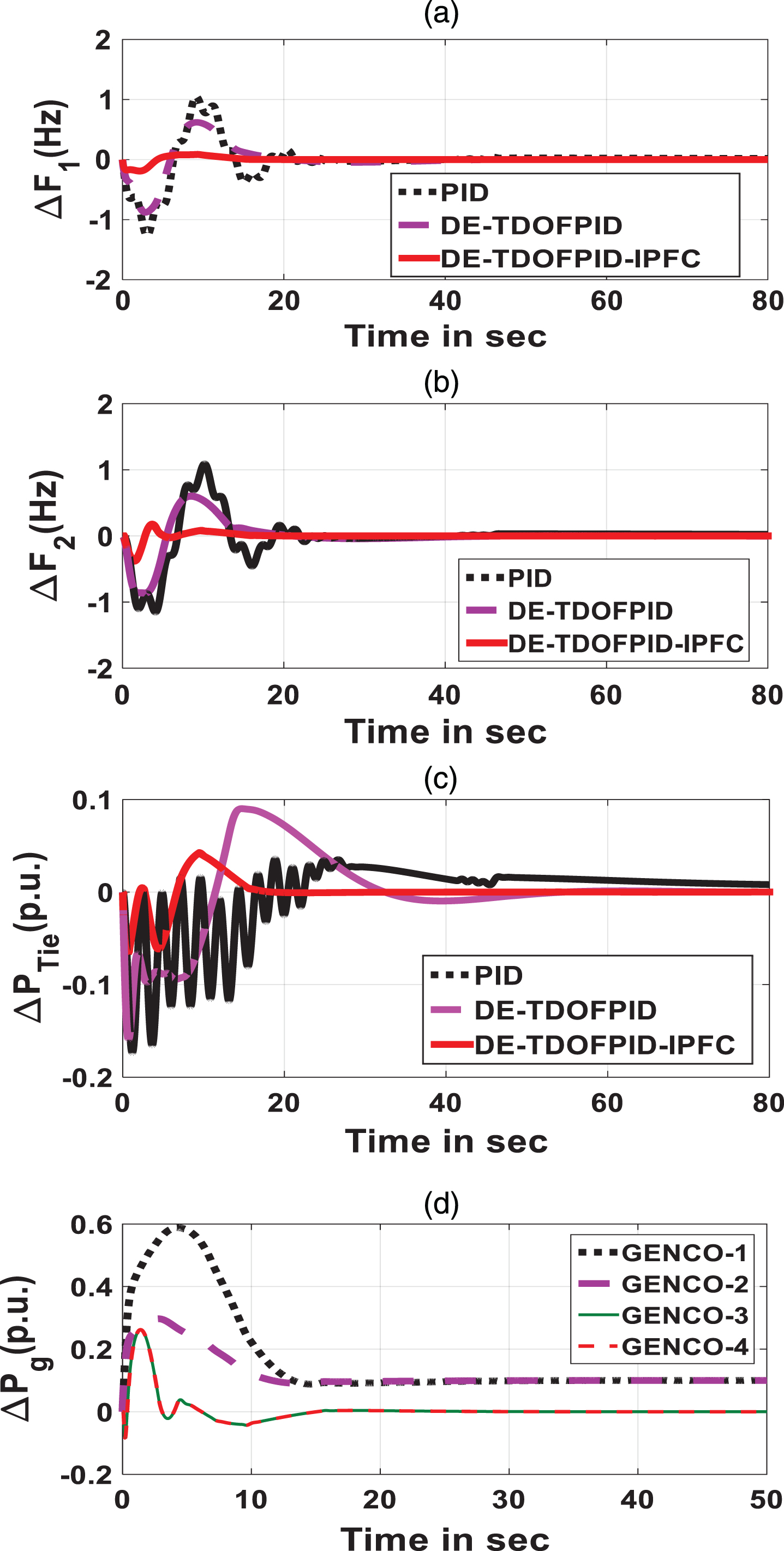
Transient response of Base case; a) Area-I frequency change (Hz) b) Area-II frequency change (Hz) c) Change in tie line power (pu) d) generated power (pu).
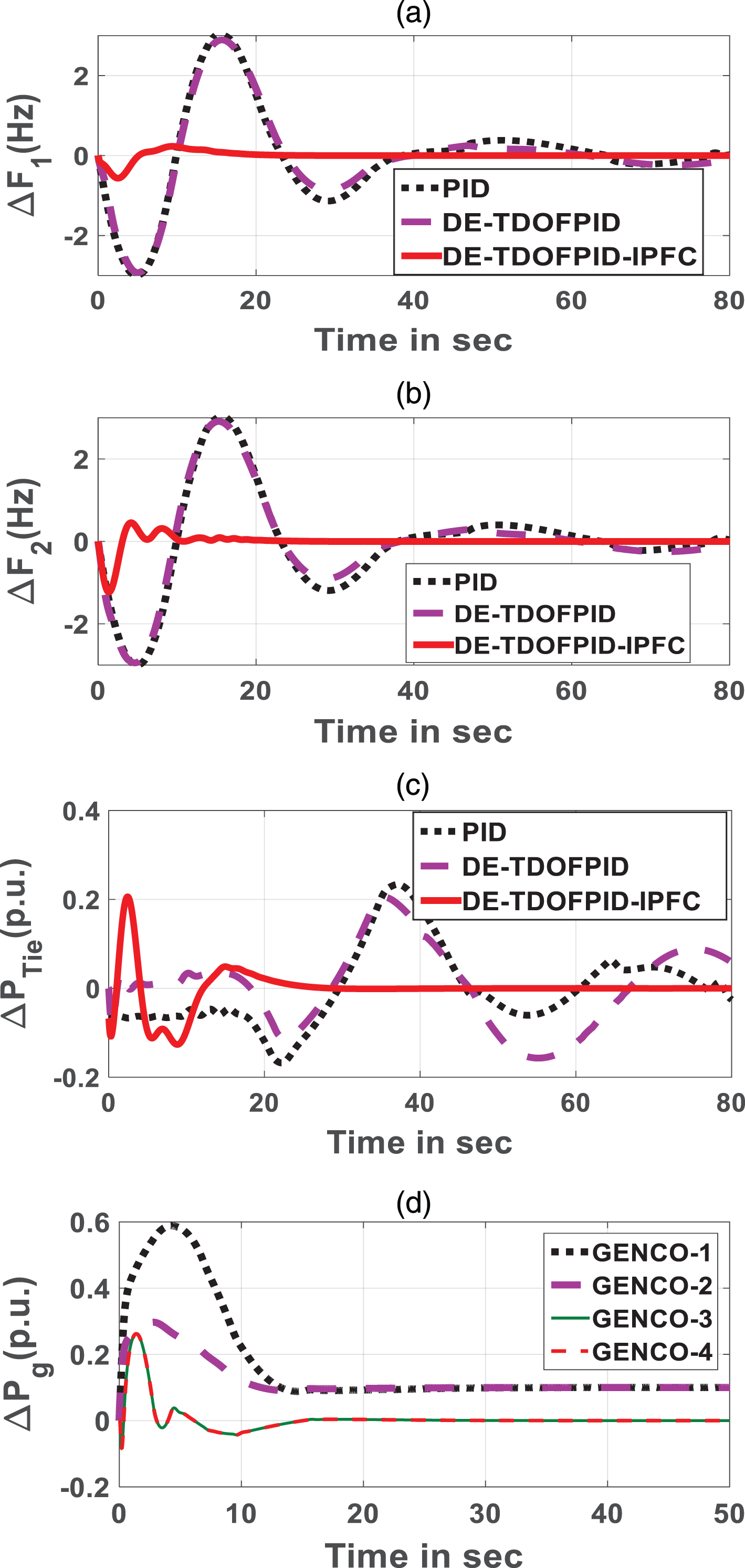
Transient response of Bilateral case; a) Area-I frequency change (Hz) b) Area-II frequency change (Hz) c) change in tie line power (pu) d) generated power (pu).
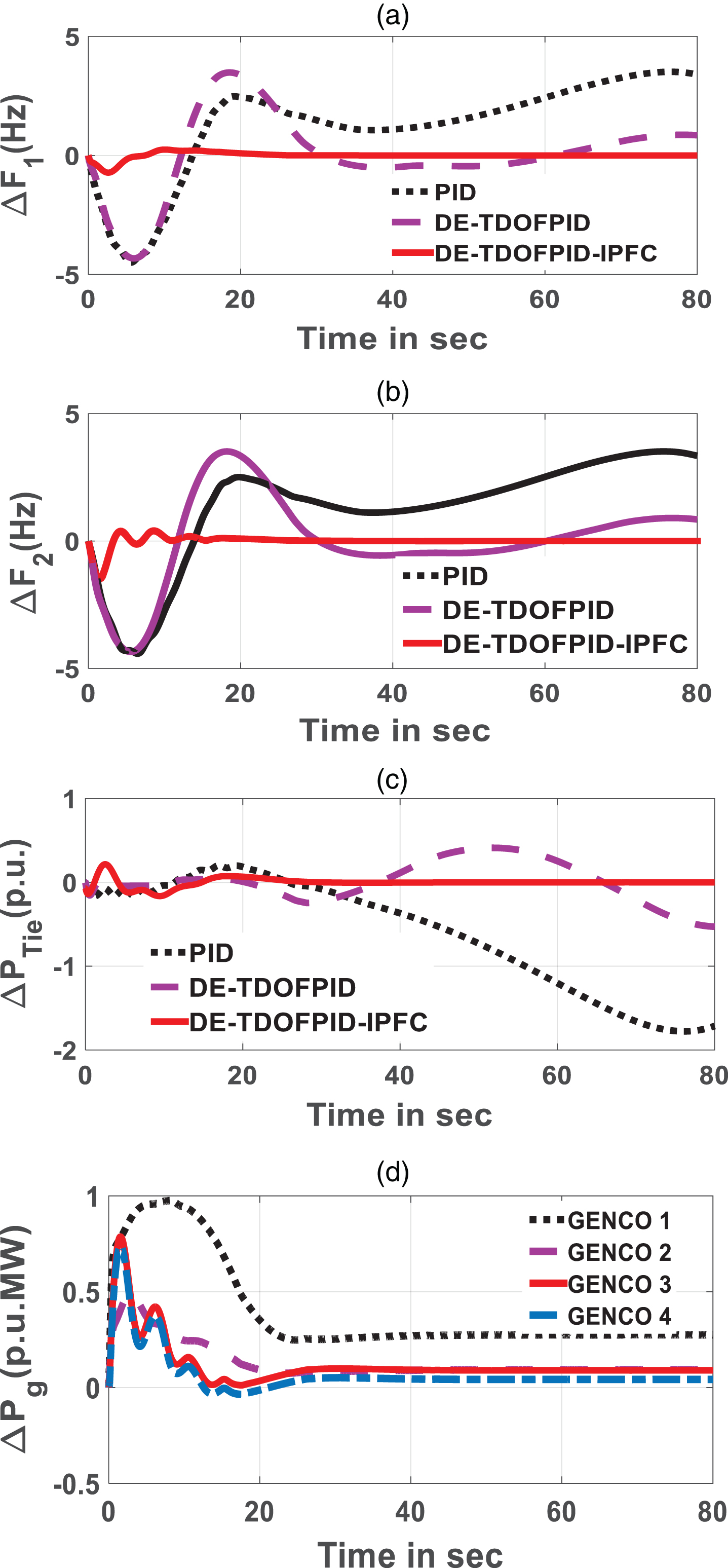
Transient response of Contract Violation case;) Area-I frequency (Hz) b) Area-II frequency change (Hz) c) change in tie line power (pu) d) generated power (pu).
One of the most popular evolutionary algorithms, Differential Evolution (DE) is announced by kennetch et al. in 1997. It is a parallel direct search technique, which is simple structure, easy to use, economical and fast response. This system functions with two population: current generation & previous generation at identical population. The size of population can be attuned by NP parameter. The number of population which is physical valued vector with measurement ‘D’ equals to the number of design parameter or control variable. Initially Parameter has been initiated and some boundary condition. DE will provide the most effective answer from the formulated issues [13]. DE applied in a system with four different stages: Initialization, Mutation, recombination and selection.
In initialization stage first define the upper and lowers for each parameter.
Then parameters values are selected randomly on the uniform intervals
Add difference vectors to a base individual to explore the searching area. For a parameter vector x
riG
arbitrarily assigns three numbers of vectors xr1G, xr2G & xr3G such that the indices i1, r1, r2 & r3 are found distinct.
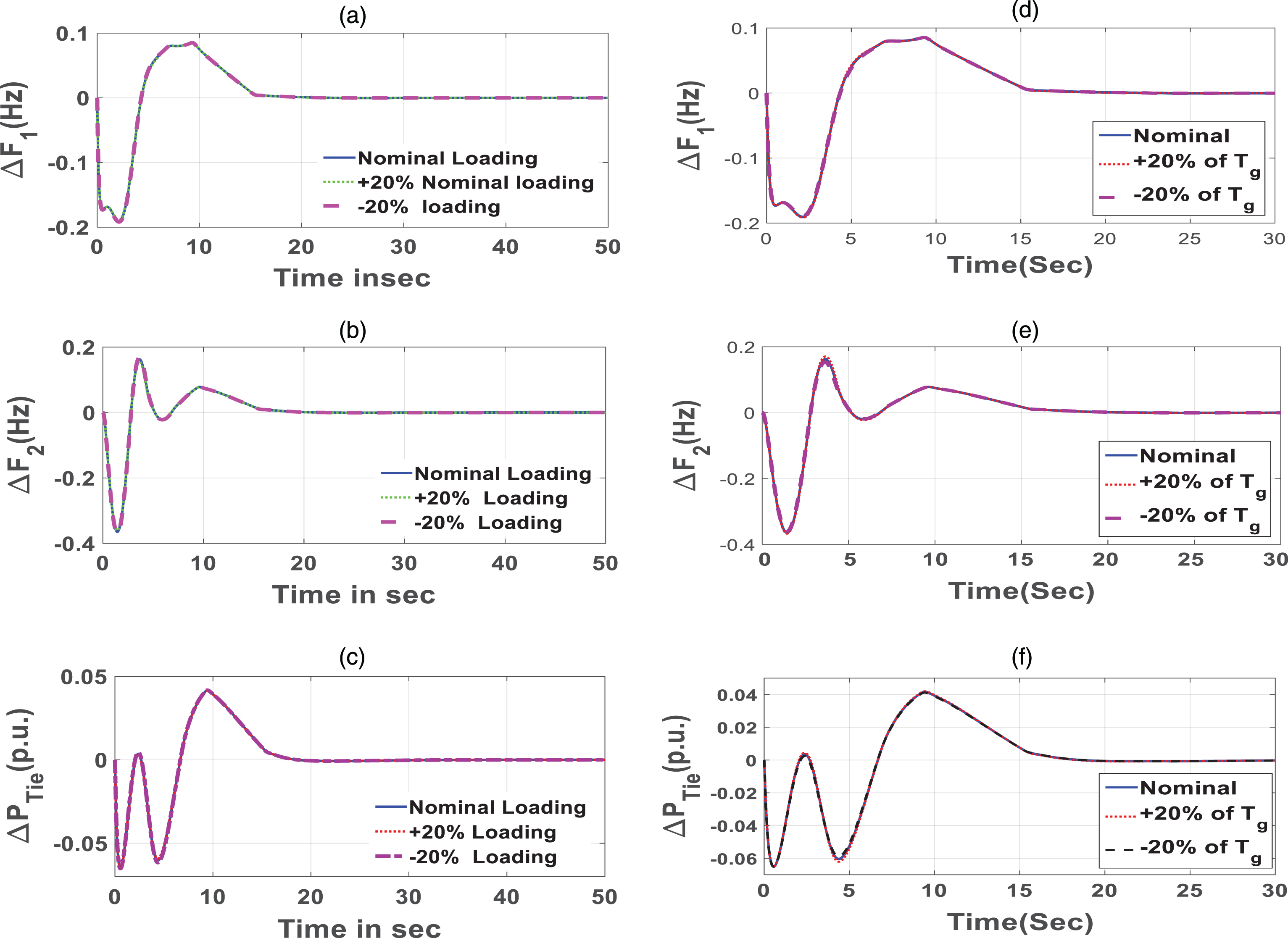
Transient response of different loading; a) Area-I frequency change (Hz) b) Area-II Frequency change (Hz) c) Tie-line power change (pu). Transient response with±20% Tg loading; d) Area-I frequency change (Hz) e) Area-II Frequency change (Hz) f) Tie-line power change (pu).
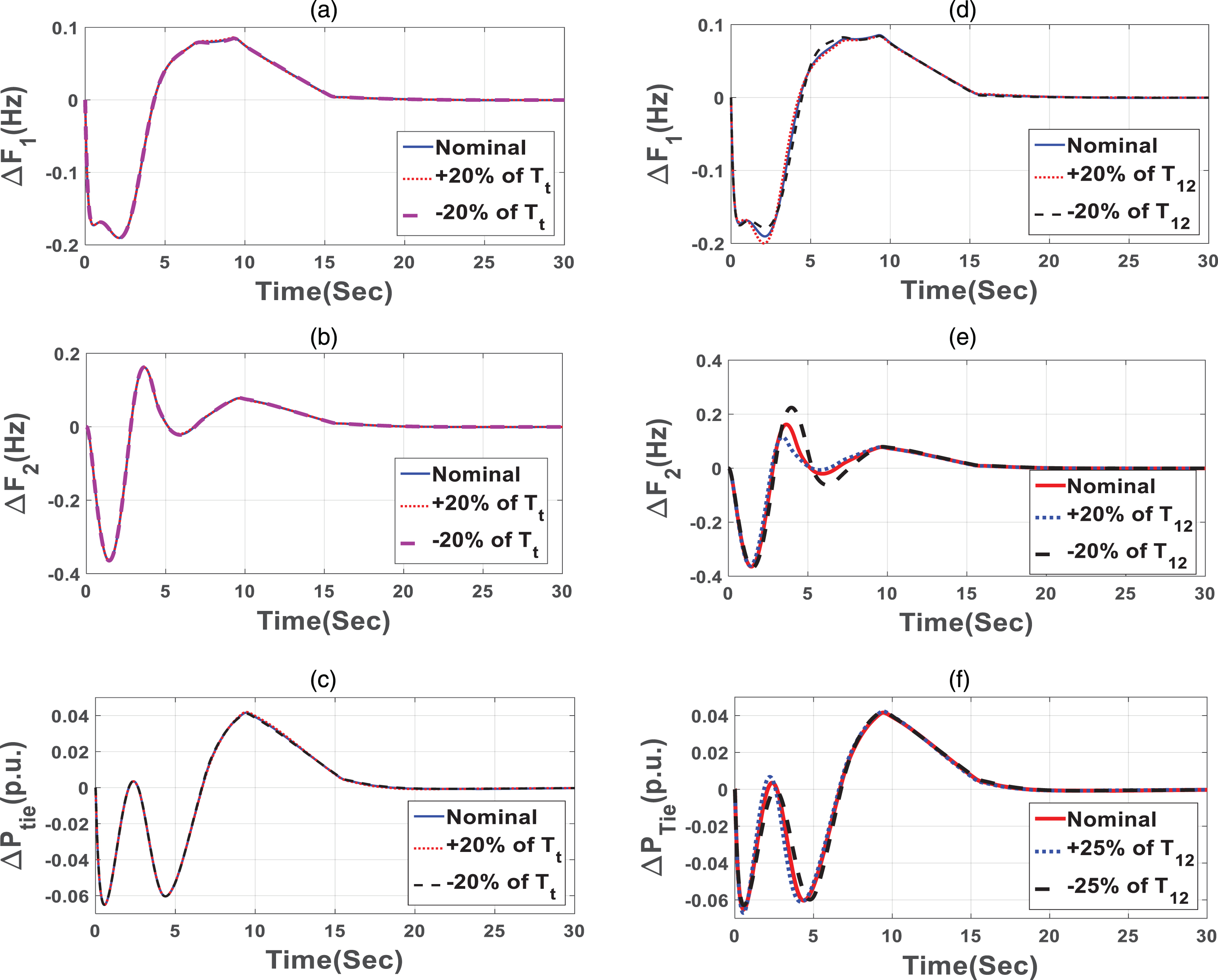
Transient response with±20% Tt loading; a) Area-I frequency change (Hz) b) Area-II Frequency change (Hz) c) Tie-line power change (pu). Transient response with±20% T12 loading; d) Area-I frequency change (Hz) e) Area-II Frequency change (Hz) f) Tie-line power change (pu).
Optimum value of PID controller
Performance index in different case
Robustness analysis during base case
Mix successful solutions from previous generation with current donors.
Comparison between the target vector and trial vector viG+1 has been carried out and the vector with better fitness value is admitted to the next g generation. The equation is mentioned is as follows.
Differential Evolution (DE) technique is used here to tune the controller parameter of AGC multi-area system.
Simulation was carried out in MTALAB-Simulink environment of AGC multi area power systems. The block diagram of two-area AGC power system is shown in Fig. 2. Both areas are identical power source and GRC, time delay and reheated turbine is added in each area. Three different case studies are carried out i.e. base case, bilateral case and contract violation case.
GenCo in each area assumes identical in AGC which means all four The GenCo in each area assumed identical in AGC which means all four participation factor become equal to 0.5 Hence we consider the load change in area-I only.
Contracts have been made in between GenCos & DisCos in area-1 to purchase 0.4 pu for each area.
Load demand of each area is equal to the load DisCo demand.
During stable region, power produced by GenCo must be equal to demand of the DisCos as per agreement through it. The power provided by the GenCo as per agreement is written as
By using eq. (15) ΔPg1 can be estimated as
As on above the power change (Δ Pg2, Δ Pg3, ΔPg4) can be calculated in same manner and are acquired as 0.1 pu, 0 pu & 0 pu,correspondingly.
In this case, DisCo1 have free to contract with any GenCo towards own or another area. AGC DisCos contract with a GenCo for power as per given DPM.
From the above matrix, if a load perturbation occurs are 0.15 puMW, 0.05 puMW, 0.15 puMW, and 0.05 puMW in DisCo1, DisCo2, DisCo3 and DisCo4 respectively. This represents the equation (2) and is estimated as 0.0675 puMW and steady state power generated as given in equation (15) can be estimated as
In violation case, one area demands more then the agreement which is stated in the contracts. Consider case II, some variation of power that is excess of 0.1 puMW demands by DISCO1. Now ΔPd1 becomes ΔPd1 = ΔPL1 + ΔPL2 + ΔPuc1= 0.3 p.u.MW and ΔPd2 is unchanged. The frequency changes in area 1 and area 2 are shown in the Figs. 8 and 9. In this case, as contract violation done by DISCO1 the values of ΔPg1 can be calculated as Δ Pg1,violate = Pg1 + apf11 * Δ Puc1 = 0.275puMW and Δ Pg2 is Δ Pg2,violate = Pg2 + apf12 * Δ Puc1 = 0.0925puMW. The values of Δ Pg3 and Δ Pg4 are same as in case II. The change in power produced by the GENCOs is shown in Fig. 8
A robustness analysis is carried out to demonstrate the execution of PID controller with varying different time constant such as governor, turbine and synchronising time constant and various loading conditions. Here±20% loading condition is considered in both areas. The time response data such as settling time, overshoot and objective function ITAE are measured and given in Table 3. Differential evolution is used to search the optimal value of gain of the PID controller to get better dynamic outcome of the interconnected power system. The optimum value concerned with the PID controller is written in Table 1. From the above Fig. (1-d).
6 (a-d), 7(a-d) & 8 (a- d) are analyzed with different cases and the performance of three cases are observed in the Table 2. Figure 9 (a-f) and 10. (a-f) show the transient analysis of different loading (±20%) and variation of parameter condition in area-I and area-II and is observed by Table 3. Finally, IPFC is added and simulated with optimal value of PID controller, which shows the better performance of the system as shown in Figs. 6, 7 and 8i; e DE-PID-IPFC based control.
Conclusion
This article pronounces a design of AGC two area restructured power system. Controllers such as PID and TDOFPID are used to enhance the system performance. Differential evolution (DE) is an algorithm is used here to find out the optimum value of TDOFPID controller having ITAE is the objective function. One of the most versatile FACTs device IPFC is used to enhance the system response and control the power flow. The dynamic response is measured in comparison with IPFC and without IPFC with non-linearity as shown in fig.
Footnotes
Appendix
| Pr1 = Pr2 = 2000 MW | f0 = 60Hz | Tps1 = Tps2 = 20 sec |
| Kps1 = Kps2 = 120 Hz/pu | Kt1 = Kt2 = Kt3 = Kt4 = 0.5 | T12 = 0545puMW |
| Tt1 = Tt2 = Tt3 = Tt4 = 0.3 sec | Kg1 = Kg2 = Kg3 = Kg4 = 1 | a12 = a21 = -1 |
| Tg1 = Tg2 = Tg3 = Tg4 = 0.08sec | R1 = R2 = R3 = R4 = 2.4Hz/pu |