
Abstract
Selection of suitable features plays a pivotal role in Electromyography pattern recognition (EMG-PR) based system designing. Time-domain features are widely used in EMG-PR based application and show improved proficiency in the development of rehabilitation robotics. Even though, the performance of existing features is not satisfactory. In this study, we proposed four novel time-domain features obtained by using first-order differentiation of original surface electromyogram (sEMG) signals feature. Here, sEMG signals were acquired from ten healthy volunteers with the help of myotrace400 device for six different arm movements. The data acquisition and pre-processing stage were carried out followed by the feature extraction process for better classification results. Four different classifiers namely, k-nearest neighbors (KNN), Linear discriminant analysis (LDA), Quadratic discriminant analysis (QDA) and Medium tree (MT) classifiers were utilized for the performance evaluation of proposed and conventional features. Experimental results demonstrate that proposed features extracted by using first-order differentiation of sEMG signals feature attained better classification accuracy with MT classifier as compared to the feature extracted from original sEMG signals with the conventional features. The accuracy of proposed feature based on first-order differentiation improved up to 6%. The results indicate that proposed features may be considered for developing the EMG-PR based system designing.
Keywords
Introduction
The sEMG signals are widely used as an input signal for controlling the rehabilitation robots and other myoelectric prostheses devices due to their non-invasive nature [1, 2]. The sEMG signals based conventional methods work well in some cases but have a limited degree of freedom (DOF) and user intuitiveness for controlling the myoelectric prostheses [3, 4].
Recent development in EMG-PR based system revealed that sEMG based control strategy has the potential for controlling more DOF as compared to conventional control strategies [5]. The EMG-PR based control strategy consists of sEMG acquisition (to obtain more accurate myoelectric signals), feature extraction (to maintain the discriminating information), classification (to predict one motion among all motion) and generating the control commands for interfacing external world devices [6]. The performance of any EMG-PR system depends on the attributes of the sEMG features extracted and characterized by non-stationary properties of sEMG signals [7]. Due to non-stationary nature of sEMG signal, extraction of the robust set of feature becomes difficult which can easily decode the arm movements effectively for controlling purpose. Nevertheless, over the years, various efforts have been made for the extraction of proper sets of features so that movement classification accuracy can be enhanced [8]. As a result, different features from time, frequency and time scale domain have been proposed for motion detection [9]. Among these, time domain features can be extracted with less computing resources and have a wide range of application over the years [10, 11].
Traditional EMG-PR methods for the human-machine interface have been evolved under the presumption that sEMG signals are stationary [12]. The sEMG signals are assumed stationary if their statistical properties do not vary over time [13]. So, the systems that are designed with the conjecture of stationarity would break down for sEMG signal classification in dynamic portions. In modern EMG-PR, different time-frequency analysis methods like fast Fourier transform, discrete wavelet transforms (DWT) and empirical mode decomposition has been suggested for studying the time-varying properties of sEMG signals [14], Previously, the sEMG signals were analyzed using first-order differentiation of sEMG signals; d(1)(t) as a part of time domain methods [15]. The computation of time domain features was achieved on the basis of statistics of d(1)(t), in place of original sEMG signals; x(t). [16]. From a statistical point of view, d(1)(t) and polynomial trend removal techniques are employed for enhancing the signal compatibility and stationarity [17]. However, better classification accuracy was achieved with d(1)(t) features over x(t) features in previous studies [18].
In this work, four-time domain features were proposed using d(1)(t) technique with an attempt to enhance the performance of EMG-PR based system. The first objective of this work was to investigate the performance of various classifiers with features extracted from d(1)(t) and x(t) whereas the second was to propose novel promising features (movement detector) based on d(1)(t) technique in place of x(t).
This paper is organized as follows: the first section describes the introduction of sEMG signal, the second section represents the data recording, pre-processing and involved classification methods, and the third section describes the results followed by conclusions in the fourth section.
Materials and methods
Data recording and pre-processing
Ten healthy volunteers participated in the sEMG data acquisition with the help of myotrace400 device and skin electrodes placed properly on specified acupressure points [19]. For ensuring the good electrode-skin contact, the subject skin was prepared with abrasive paste and alcohol wipes so that impedance between the contacts would be minimum. Each volunteer was asked to sit on the comfortable chair in a relaxing position and directed to follow the instructions displayed on the computer screen to further record the data from different arm movements. A rest session was introduced between two consecutive classes of arm motion for avoiding the mental and muscle fatigue. Six consecutive trials were executed to acquire the data per volunteer. In each trial, every muscle movement contraction was maintained for 5 sec with 10 repetitions in order to get 50 sec sEMG signal recordings for each motion category. Consequently, a total of 300 sec sEMG recordings i.e. (50 sec×6 trials) were accomplished for each movement in the experiment of six-trial on volunteer participant.
The volunteers performed the elbow flexion (EF) elbow extension (EE), wrist flexion (WF), wrist extension (WE), wrist supination (WS) and wrist pronation (WP) movements of their right arm. For the elbow movement electrodes were placed on the biceps brachii, triceps brachii muscles whereas for wrist motion electrodes were attached to pronator teres, supinator, flexor carpi radialis and extensor carpi radialis muscles respectively. Figure 1 shows the complete experimental setup and sEMG data acquisition system for different arm movements. The figure shows the myotrace400 device along with necessary component and six different hand postures used during the data recording.

Data Acquisition system and complete experimental set with different arm postures.
A sliding window analysis with a length of 150 msec was utilized for segmentation of combined sEMG data sheet. The sliding window has an increment of 100 msec and overlapping of 50 msec for providing the continuous stream of data [20]. Figure 2 shows the systematic operations for sEMG signal classification and demonstrates that in the pre-processing stage, full wave rectification, amplitude normalization, smoothing, and filtering operation was performed followed by DWT de-noising [21]. After this, suitable features were extracted and d(1)(t) technique was applied to get novel features for the classification of sEMG signal to decode different movements. For avoiding the noise, a bandpass filter of 20 to 500 Hz bandwidth was utilized [22]. The signal pre-processing circuitry had CMRR greater than 100, the amplifier gain of 500, input impedance more than 100 MΩ and baseline noise level less than 1μVolt [23].
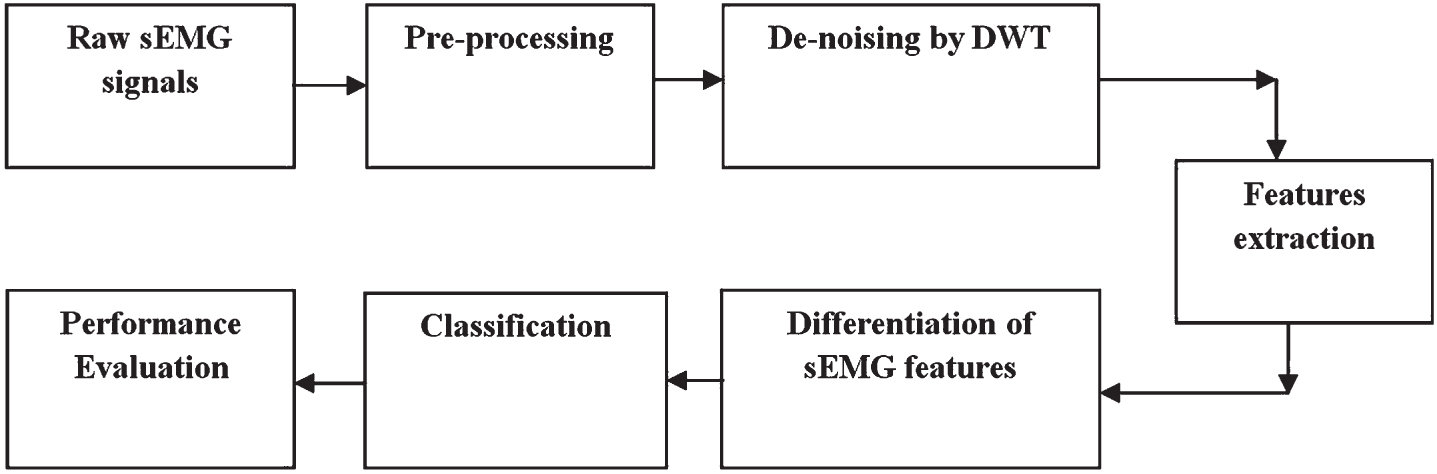
Block diagram of sEMG classification.
Time statistics based features were vastly employed in the field of bio-medical robotics which provides better accuracy as compared to the frequency domain and time-frequency domain features.
Time domain features computed from original sEMG signal, x(t), are: (i) myopulse percentage rate (MYOP), (ii) root mean square (RMS), (iii) variance of EMG (VAR), (iv) simple square integral (SSI) (v) Mean absolute value (MAV) and (vi) integrated EMG (IEMG), whereas corresponding matched time domain features computed from d(1)(t), are: (i) willison amplitude (WAMP), (ii) difference absolute standard deviation value (DASDV), (iii) difference variance value (DVARV), (iv) second order momemts (M2), (v) difference absolute mean value (DAMV) and (vi) waveform length (WL). The existing time domain features and their corresponding statistics on the transformed signal are shown in Table 1. WAMP and MYOP were computed with the threshold value of 25 mvolt for the amplitude of sEMG signal to avoid the noises.
Mathematical formulas of existing time domain features obtained from d(1)(t) and x(t)
Mathematical formulas of existing time domain features obtained from d(1)(t) and x(t)
The sEMG signals pattern is shown in Fig. 3 in which data was recorded from six different limb movements after the full-wave rectification process. The figure indicates that amplitude of sEMG signal varies for different movement and it is due to the variation of the contraction force produced by the muscles for different movement thereby producing the dissimilar values. sEMG signals patterns for six different arm movements.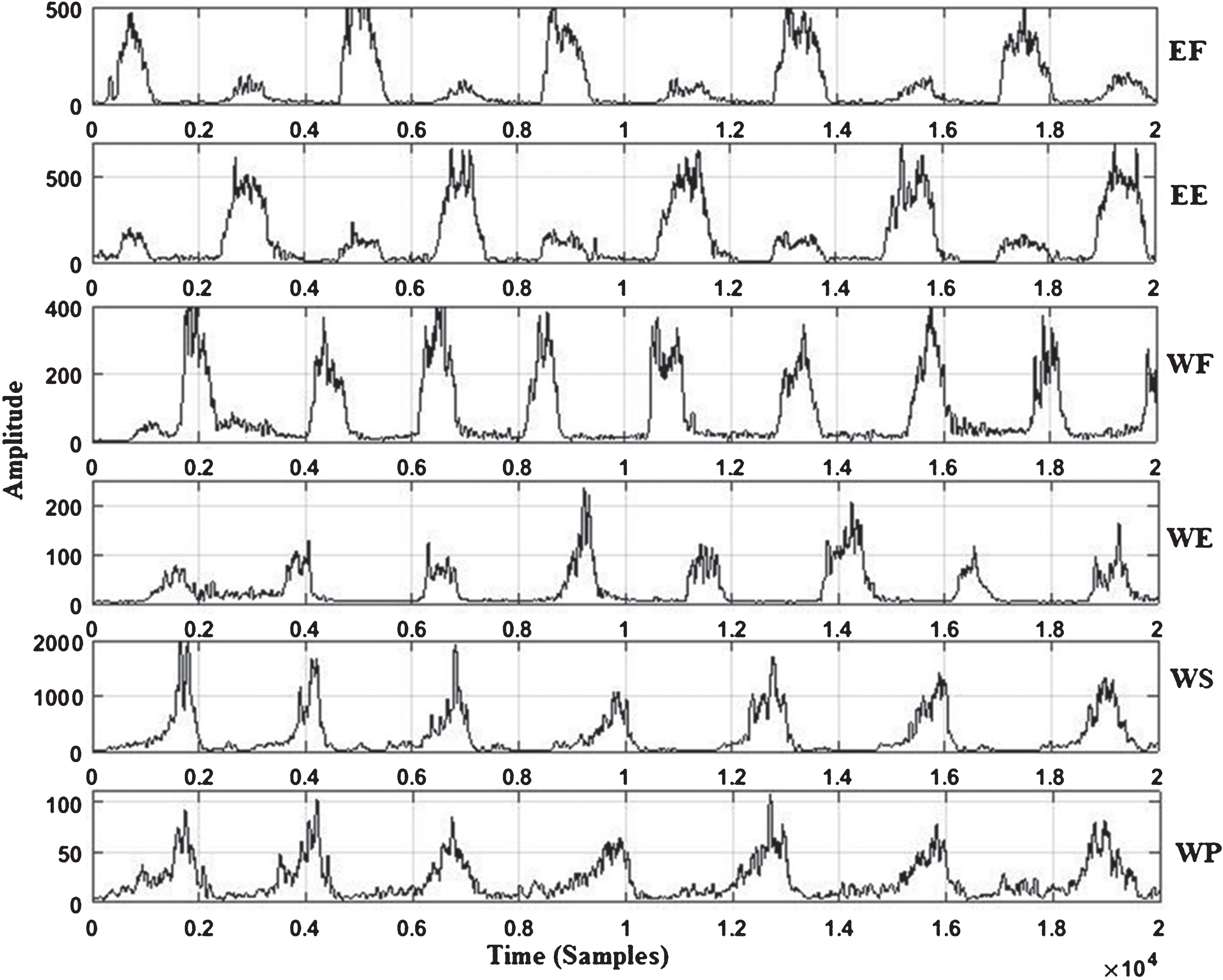
The pre-processed and de-noised signals were employed for features extraction to make feature vector for classification purpose. One commonly used and three latest features that have not formerly been applied to d(1)(t), were evaluated with four different classification methods. These features are Absolute value of the Summation of the Square root (ASS), Mean value of the Square Root (MSR), Absolute value of the Summation of the exp
th
root of data and its Mean (ASM) and modified V-order whose mathematical definitions are as follows:
The newly proposed time domain features are based on the ASS, MSR, ASM and modified V-order feature and obtained by applying the differentiation technique on it. The mathematical definitions of proposed novel features are as follows: Difference Absolute value of the Summation of the Square root (DASS) is obtained from the absolute value of the summation of the square root using a differentiation technique and it is expressed by Equation (5) Difference Mean value of the Square Root (DMSR) is the second time domain feature proposed which is acquired from the mean value of the square root using first-order differentiation method and presented in Equation (6)
Where, k is a number of analysis window and x
n
are analysis window data corresponding. DMSR is calculated in three steps: difference of all value is calculated by subtracting the successive value from the previous one followed by the square root of all values and mean of their resultants. Difference Absolute value of the Summation of the exp
th
root of data and its Mean (DASM) is also extracted by using the first-order differentiation technique and shown in Equation (7)
Where exp = 0.5 if 0.75 ≥n ≥ 0.25*k,
Otherwise, exp = 0.75
Based on the sEMG signal, the values of exp can be either 0.5 or 0.75. The feature is determined in four steps: the difference of all value found is determined as calculated in the previous three cases followed by the addition of all exp root of the window, mean of resultant value and the absolute value of the resultant mean. Difference of modified V-order (DMV-order) is the fourth new feature and defined by Equation (8)
It is calculated by taking the first-order difference of modified V-order feature. DMV-order is determined by the few steps: first, the difference of all value is calculated by subtracting the successive value from previous one. Secondly, the summation of all value with 5th power and the 5th root of the resultant are calculated. Finally, the mean value of resultant is determined.
The quality evaluation of the sEMG signal features was done on the basis of classification rates and the ratio of the number of correctly classified samples to the number of misclassified classified samples (CCS/MCS) yielded by classifiers. Pervasively, the performance of EMG-PR is measured in terms of classification accuracy as the main index. Another metric which defined the performance of the classifier is the CCS/MCS ratio. Generally, the classification accuracy can be defined as the ratio of correctly classified sample to the total number of samples in a test set.
The KNN, LDA, QDA and MT classifiers have been widely applied for the classification task of bio-medical signals, therefore, KNN, LDA, QDA and MT were used for classification of sEMG signals [24–26]. The popular and four proposed features obtained from the sEMG signals were tested on the classifiers. The classifiers are trained and tested for combined data set collected from all subjects. Different fold cross validation (FCV) varied from two to ten, were carried out for each feature for dividing the data into training and testing sets. The accuracy of existing and proposed features was critically compared with each other for finding the usefulness of proposed features.
The performance evaluation of different classifiers was investigated through the features extracted from d(1)(t) and x(t). Here, the results are compared in order to evaluate the performance of four proposed novel features in contrast with some conventional features on the basis of four commonly used classification methods viz. KNN, LDA, QDA and MT classifiers. The conventional time domain features extracted from the original sEMG signal; x(t), are: (i) MYOP, (ii) RMS, (iii) VAR, (iv) SSI, (v) MAV, and (vi) IEMG and their corresponding first-order differentiation of time domain features extracted from the original sEMG signal; d(1)(t), are: (i) WAMP, (ii) DASDV, (iii) DVARV,(iv) M2, (v) DAMV, and (vi) WL. Now the accuracy of these conventional features are compared with the accuracy of four proposed novel features namely as DASS, DASM, DMSR, and DMV-order procured from the features namely as ASS, ASM, MSR and MV-orderrespectively.
Tables 2–5 showed the average classification accuracies of conventional features extracted from d(1)(t) and x(t). The computation of accuracy was done by averaging the classification accuracy of all FCV varied from two to ten. The result indicates that the features extracted from d(1)(t) have better accuracy as compared to the features extracted from x(t). Out of all classifiers, the MT classifier demonstrated the best performance and the average classification accuracy of 77.5% were achieved in case of conventional features extracted with d(1)(t) technique. The accuracy was increased by 6% in comparison with x(t) and the KNN classifier was found the second best method. The WAMP feature demonstrated the best accuracy with the average classification accuracy of 78.6% using MT classifier followed by DAMV, DVARV, DASDV, M2 and WL with 78.1%, 78%, 77.6%, 77.5% and 74.9% respectively. Therefore, the features from d(1)(t) are suggested instead of x(t) features. The results also clarified that the features extracted from d(1)(t), raised the accuracy by 6% because it makes the signal more stationary compared to x(t). Figure 4 shows the average classification accuracies of KNN, LDA, QDA and MT classifier for individual conventional features which is a graphical representation of Tables 2–5. Individual classification accuracies of the different classifier for conventional features. Average classification accuracies (%) of the existing feature scale based on d(1)(t) and x(t) using KNN classifier Average classification accuracies (%) of the existing feature scale based on d(1)(t) and x(t) using LDA classifier Average classification accuracies (%) of the existing feature scale based on d(1)(t) and x(t) using QDA classifier Average classification accuracies (%) of the existing feature scale based on d(1)(t) and x(t) using MT classifier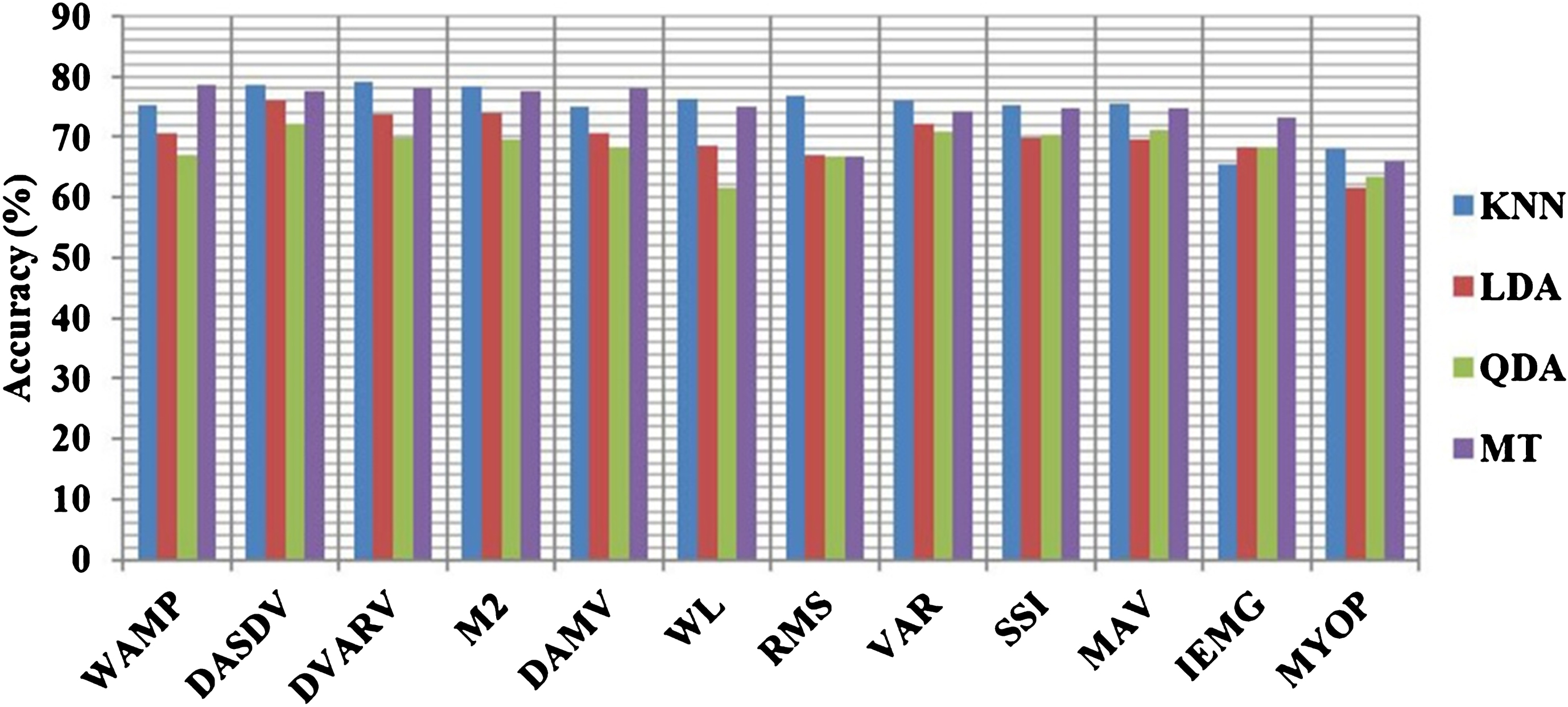
Tables 6–9 exhibited the average classification accuracies of proposed features extracted from d(1)(t) and x(t) with the same classifiers. The results indicated that MT classifier was again found best with 84.9% average classification accuracy by utilizing the proposed feature obtained with d(1)(t) technique and accuracy raised more than 6% as compared to x(t). Similarly, the second best classification method was KNN with the average classification accuracy of 78.6%. The DASM feature revealed the best accuracy with the average classification accuracy of 87.8% by utilizing MT classifier followed by DASS, DMSR and DMV-order with 86.7%, 85.8% and 79% respectively. The results clearly indicated the usefulness of proposed features because the average classification accuracy was enhanced more than 6% by employing the d(1)(t) technique in contrast with x(t). Therefore, it is worth mentioning here that proposed features are effective enough for improving the classification accuracy with MT classifier. Figure 5 shows the average classification accuracies of KNN, LDA, QDA and MT classifier with proposed features extracted from d(1)(t) and x(t). The figure indicates that proposed features have better classification accuracy as compared to any other features. Individual classification accuracies of the different classifier for original and proposed features. Average classification accuracies (%) of the proposed feature based on d(1)(t) and x(t) using KNN classifier Average classification accuracies (%) of the proposed feature based on d(1)(t) and x(t) using LDA classifier Average classification accuracies (%) of the proposed feature based on d(1)(t) and x(t) using QDA classifier Average classification accuracies (%) of the proposed feature based on and x(t) using MT classifier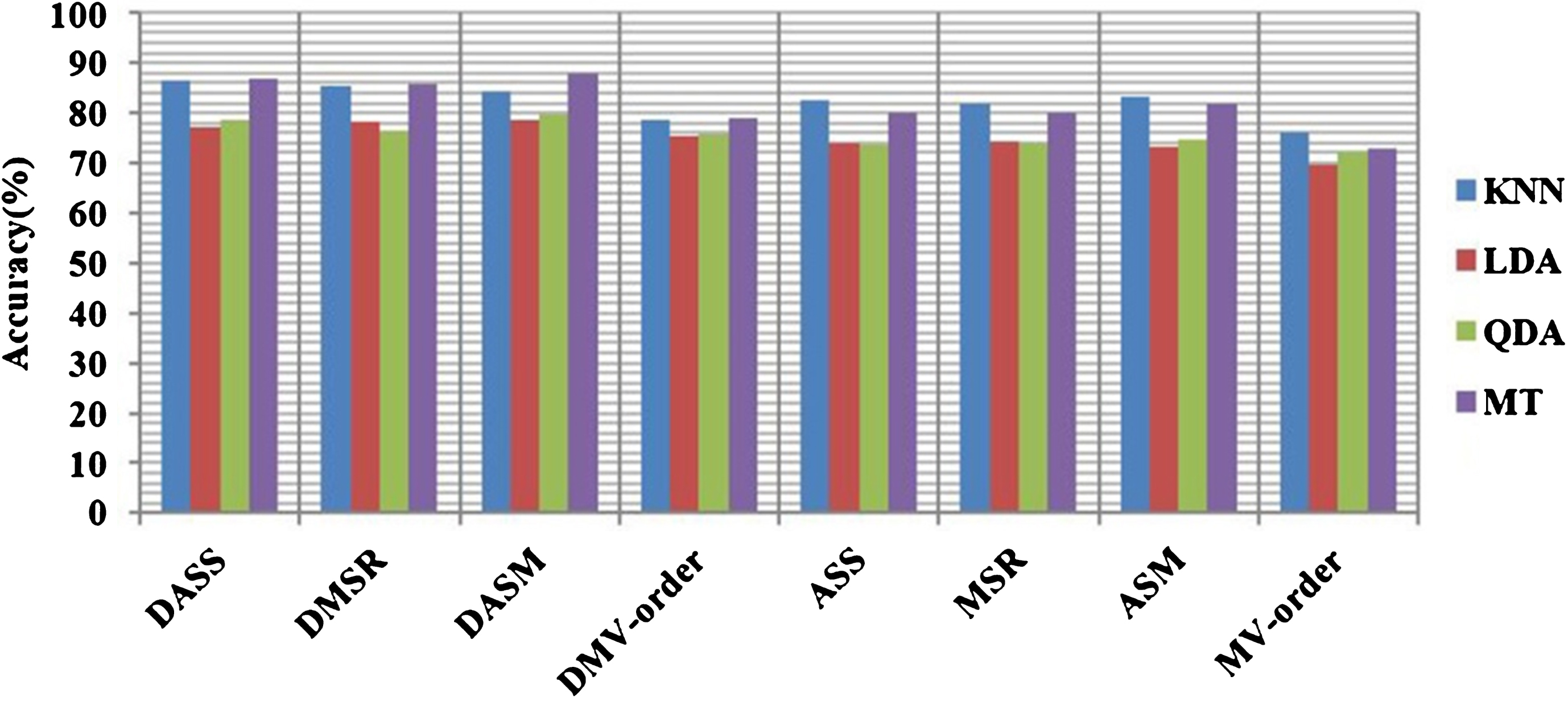
Another important parameter to evaluate the performance of conventional and proposed time-domain features is CCS/MCS ratio which simply reflects the robustness of methods for correctly distinguishing the different motion classes of the sEMG signals. In this context, if the ratio is high then the feature will improve the classification accuracy to a higher value. In addition, the CCS/MCS ratios were computed for the different combination of ASS, ASM, MSR and MV-order as well as DASS, DASS, DMSR, and DMV-order. The features combination of ASS, MSR, ASM, and MV-order were named as Feature Set 1 whereas the proposed features combination of DASS, DMSR, DASM and DMV-order were named as Feature Set 2. Similarly, a conjunction of the four commonly used time domain features (SSC+RMS+WL+MAV) were also examined and referred as 4-TD features. The CCS/MCS ratios were calculated for KNN, LDA, QDA and MT classifiers for different combinational features. In Table 10, the CCS/MCS ratio for DMSR feature obtained as 6.97 which was higher as compared to the 4-TD feature set whereas DASM feature provides an equivalent result for the CCS/MCS ratio to the 4-TD feature set. While the feature set 1 yielded the good CCS/MCS ratio which was 35.66 whereas the feature set 2 produced the best CCS/MCS ratio of 45.54. The MT classifier performed the best among the LDA, QDA, and MT classifier. So, we can further conclude that among all methods, MT classifier showed the best classification accuracy with proposed features based on d(1)(t) technique. It can be easily demonstrated with the help of Fig. 6 showing the relationship between CCS/MCS ratio Vs different features for MT classifier. It is a graphical representation of Table 10 indicating the higher performance of MT classifier for the proposed feature set as compared to the conventional feature set. CCS/MCS ratio of different features with MT classifier. CCS/MCS value based on the conventional time domain and proposed features using KNN, LDA, QDA and MT classifiers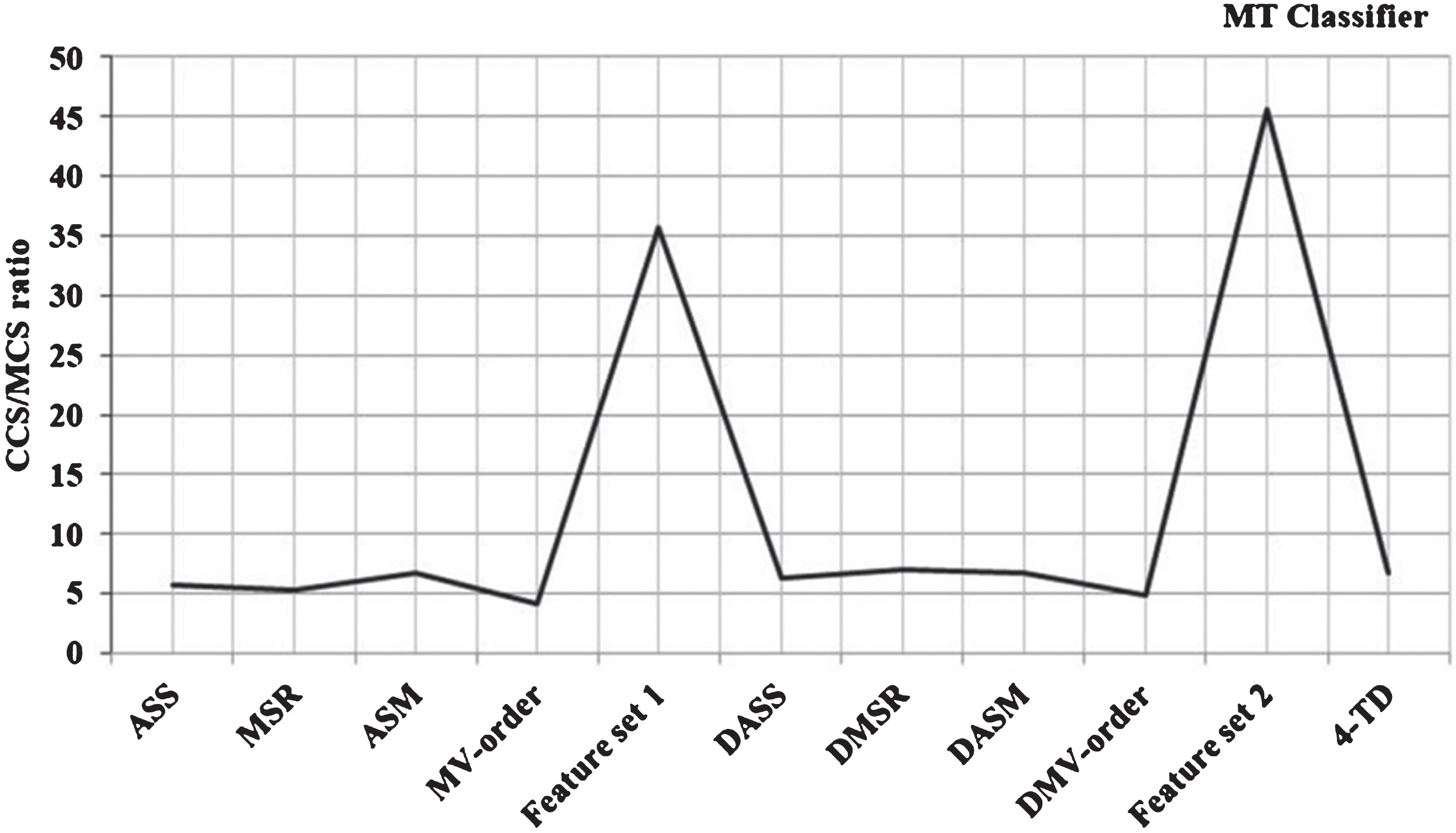
It is clearly verified from the above discussion that d(1)(t) technique promotes the classification accuracy. Another worth mentioning point is that different combination of proposed novel feature always yielded better result as compared to the single feature. So the features combination of DASS, DMSR, DASM and DMV-order should be used for better performance
Classification accuracy has immersed a lot of research attention in the field of rehabilitation robotics for developing the assistive technology. This study suggested four novel time-domain features extracted from the sEMG signal of healthy subjects for improving the classification performance. The performance evaluation of proposed features was carried out by using classification accuracy and CCS/MCS metrics. The results suggest that proposed movement detectors have good potential for the improvement of EMG-PR system with MT classification method. Notwithstanding, the results of this study may hold for elderly or amputees persons, Finally, EMG feature extracted by using the first-order differentiation of sEMG signals are found more dominant as compared to original sEMG signal feature as well as more prominent than conventional features. The proposed features can be utilized in various EMG applications like human-machine interface design and disease identification.
In near future, sEMG data from amputee’s persons can be recorded with the combination of conventional and newly proposed features for developing the rehabilitation robotics system along with enhanced properties. So, in the field of pattern recognition, the better predictions will be desired for higher DOF robotic system design based on sEMG signals.