
Abstract
As office workers spend most of their time in front of computer monitors, they are at the risk of suffering from forward head posture syndrome. Repeated head forward postures may cause cervical discs. To address a precautionary approach for the syndrome, we propose a pervasive system. The purpose of this article is to identify design issues in pervasive computing when applied to forward head syndrome, which can give designers insights into how people interacts with the pervasive service and help shape a future research direction to cover those findings.
Introduction
Pervasive computing refers to another view point of ubiquitous computing. It is characterized by casually accessible, often invisible computing devices, frequently mobile or embedded in the environment, and connected to an increasingly ubiquitous network structure. Pervasiveness raises the unique service domain issues which are calm and invisible, but continuous services like oxygen in human environment [1]. To make service completely calm and invisible is not hard, but in many user contexts, there are specific touch points for the service to be shown in proper sense of existence, while in the other context, the service is invisible. For example, emergency service should be invisible when the context is safe, but at the time of emergency, the service should be shown clearly, and be accessible from anyone who needs it.
It is a very critical research issue to know how to manage the pervasiveness of service according to user context and how to change the attributes of pervasiveness to clear communicative service in a seamless manner. We would like to know the attributes and key issues of design and development for partially pervasive services in a user’s context.
In the context of pervasive robot, Domínguez et al. [2] presented some examples without formally defining what a pervasive robot is. Unlike the traditional robots [3] whose behaviors are designed to be distinctively visible to human beings, a pervasive robot service is designed to be context-aware in the sense that its identity can be hidden or not upon a user’s context.
Causes and effects of forward head posture syndrome
When we observe computer users working, we can easily find that they usually put their necks forward toward the monitors in common. Repeated head forward postures may cause herniated cervical discs. Therefore, to prevent the syndrome in advance is the best method in our daily life. To prevent the syndrome, the medical community [4] recommend that a user should sit upright and keep a distance from the monitor and the height of the monitor as follows. The monitor should be placed so that its top should be aligned with the height of the user’s eye, and it should be 40 cm to 70 cm away from the user’s eye. Note that we used 60 cm as a reference distance in our experiment. Although we know that taking the preventive measures is better than cure, it is very hard to keep this prevention guide.
Design requirements
First we observed people in a work environment and draw characteristics of the disease and its treatment. Based on these observations and findings, we established the following design requirements for prototype systems to deal with forward head posture syndrome. Continuous & Proactive Measures: The forward head posture is very hard to be completely corrected at a hospital. Although it was completely treated, it is highly likely that the user returns to his previous status or habit which causes the syndrome again. Therefore, it is important to take continuous, proactive measures in everyday work environment as well as at a hospital. To do this, the measure should be easily available at home as well as in the office. Unobtrusive & Pervasive Actions: Main interest of users is to do their work without disruption. Therefore, users generally want to apply the prototype system to the extent that it is only helpful in preventing the syndrome, but the other actions of the system should be invisible or unnoticeable to the users. Therefore it should also require intervention with users as little as possible. Real Time Detection & Feedback: A user wants to check in a real time, intuitive way whether his posture is good or not. But, the level of feedback should be determined to the extent that it does not disturb the user’s concentrated working. The level of interruption (or interference) with a user to confirm the feedback information is required as little as possible.
Proposals
First prototype: A monitor control system based on NXT
To rapidly test and refine our design requirements, we first prototyped our system using Lego Mindstorms NXT [5] as shown in Fig. 1. The prototype consists of sensing, computation, actuating and feedback parts. Sensing part senses a user’s posture and sends it to the computation part, which is programmed in ROBOTC [6] and runs on NXT, a central processing unit of Lego Mindstorms. It calculates the ideal position of the user based on the sensed data. Actuating part moves the monitor to the place that was determined by the computation part of the prototype. The actuating part was implemented by deploying both tank-typed wheels for moving forward and backward and pulley-typed devices for moving upward and downward. The feedback part provides a user with alarm sound by which he could check his current position in real time way. Sensing and feedback parts are detailed in the following.
Sensing Part: To sense a user’s posture, we deployed three sensors: two distance sensors and one Webcam. Distance sensors are attached to the upper and lower part of a monitor, respectively. The upper sensor (ultrasonic sensor of effective range 250 cm) measures the distance between a user’s face (eye) and a monitor. The lower sensor (IR sensor of effective range 80 cm) does the distance between a user’s chest and a monitor. We usually determine that the user takes a forward head posture when the difference between the previously measured distances is greater than 5 cm, called the reference threshold value. When a user uses this robot for the first time, the user enters into a configuration mode where the robot measures and stores the correct position when the user takes an upright posture. Feedback Part: Feedback part communicates information to a user through sound. When a user takes an inappropriate posture, it gives feedback to the user so that the user might recognize his posture and further make necessary corrections. Although it may be very simple in the technological viewpoint, the alarm sound itself is meaningful in the sense that it alerts the users.
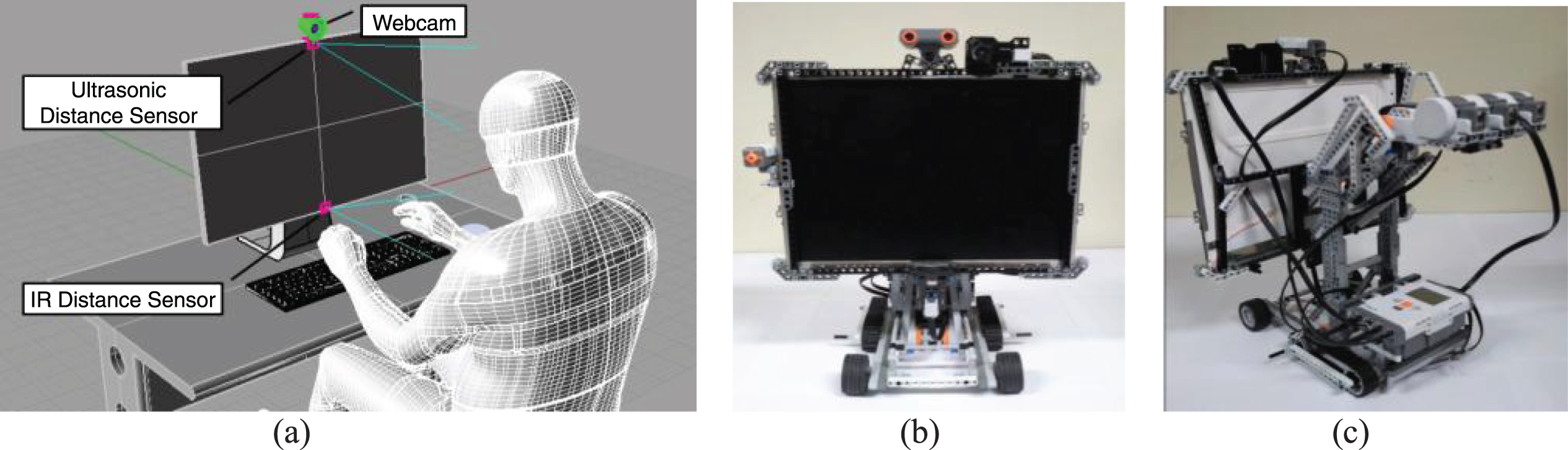
First prototype based on NXT, including (a) overview, (b) front view, and (c) rear view.
While doing experiment with this prototype, we found that a participant kept about 60 cm away from the monitor at the beginning, but in the distance dropped under 40 cm. With the correction feedback from the system, he again returns to the original position. However, we also found some problems with the prototype system: (1) Sudden movement of the monitor without any warning in advance seems to give more surprise to a user than initially expected. This was confirmed from the interviews with the participants. (2) The accuracy levels of distance sensors deployed are so low that they cannot measure the distance when a face is skewed to the right or left. On the basis of these findings, we changed the basic design concept as follows: The first prototype is based on the concept that the robot automatically senses the user’s position and adjusts its locations by moving back and forth. Now we propose a new concept which is the exact opposite of the first prototype. In the second prototype system, a user should adjust his postures by moving his bodies, while the system stays fixed. It is common that those two prototypes sense a user’s postures and give feedback to the user.
Second prototype: A webcam-based system
Like the first prototye system, the second prototype system shown in Fig. 2 also consists of sensing, computation, actuating and feedback parts. The sensing part is basically implemented using a Webcam, with the resolution of at least 640×480 (Therefore, any Webcam available in the market has a sufficient performance). The Webcam is deployed at the top, middle region of the monitor, and detects and tracks the user’s face. The computation part is an application program which is programmed in C# and runs on the user’s PC. The application uses OpenCV 2.1 [7], an open source library, which takes frames sent from the Webcam and identifies the location of the user’s face based on the predefined XML file (haarcascade_frontalface_alt2.xml) which contains information on face contour. With the system on, a Webcam sends frames to the computation part, which records the average of measured data four times as the right posture. According to the parameters as shown in Table 1, the computation part determines whether the user’s posture is right or not. The parameters were obtained from the preliminary experiment where five participants are involved. The feedback part provides a user with a warning by which he could check his current position in real time way. Sensing and feedback parts are detailed in the following.
Sensing Part: A Webcam captures and sends 1 frame per second to the computation part. Every 10 minutes after it starts, it stores the user’s posture as an image file. If the user receives a warning within 10 minutes from the start, the Webcam captures and stores the posture as an image file at the time, and repeats the 10 minute cycle. Feedback Part: There are a variety of warning methods to be considered for deployment. However, some methods have their own drawbacks. For example, sound warning works only in the computer system equipped with speakers. Brightness control expects to have a disadvantage that as the display darkens, a user tends to move his neck forward. When compared to others, however, a pop-up window warning seems to be more pervasive. Therefore, unlike the first prototype system which uses sounds as a warning, we use pop-up windows (See Fig. 2b). When the user keeps wrong postures for 2 minutes, the system gives out the pop-up window. If the user keeps a right posture for 15 seconds, the system initializes the 2 minute counter. The warning parameters such as 2 minute and 15 second are drawn from the preliminary experiment.
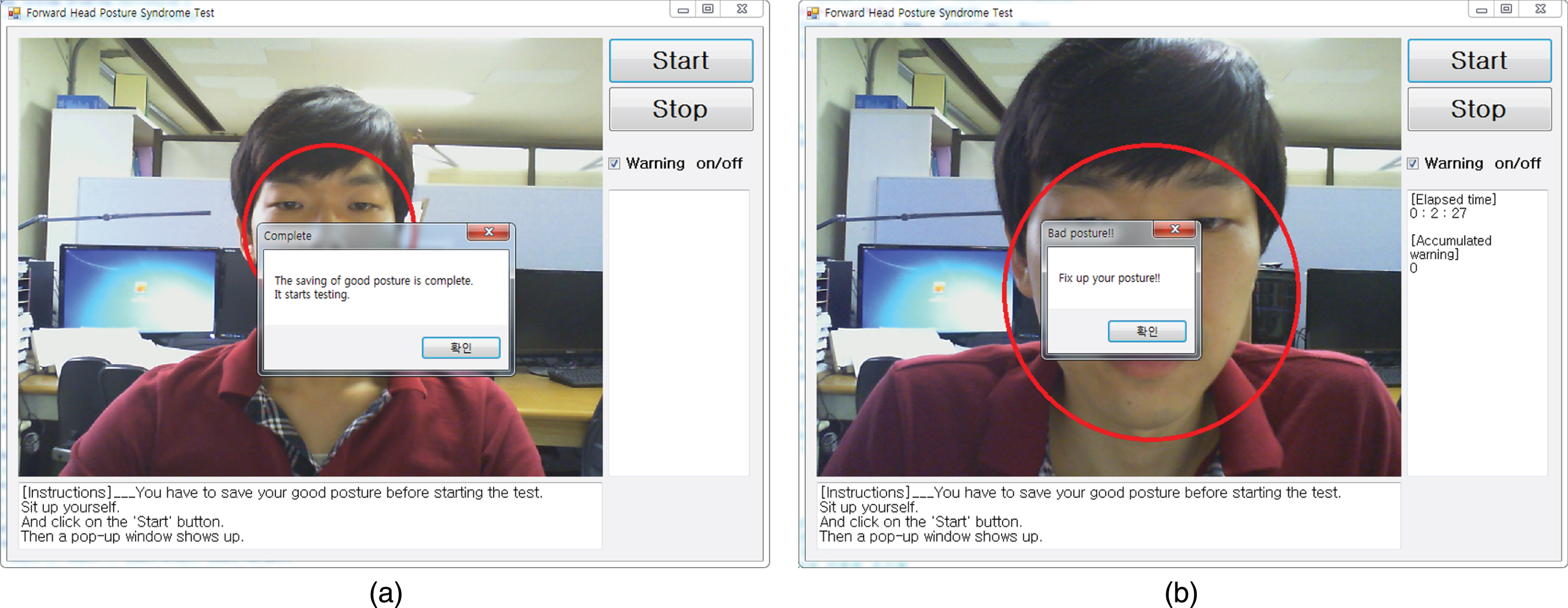
Second prototype’s screens, including (a) a display showing that the measurement of a user’s good posture is complete at the setup stage and (b) a warning pop-up window.
Criteria of wrong postures
The purpose of this experiment is to confirm that the proposed second prototype satisfies the aforementioned design requirements. Furthermore, it is to identify some key issues when designing a system for forward head posture.
Prior to conducting our experiment, we formulated hypotheses as follows: (1) There will be both generic patterns which all participants show and personal patterns which apply only to some participants; (2) A personalized mechanism, which analyzes personal patterns and gives feedback based on the analysis, will impact greatly on a pervasive service for the forward head syndrome.
To test the prototype, we had seven participants, named A through G, take part in the main experiment. Total duration time per experiment per user was more than one hour, ranging from 1 hour to 5 hours 44 minutes. We classified a pattern as a generic pattern when it is shared among five users or more, otherwise a personal pattern. Observations from the recordings by a Webcam and results from the interviews revealed the followings.

User A’s pattern. The user A kept the initial posture for the first one hour. However, after one hour, he started moving his posture intensively. The values on x-axis denote flow of time in seconds, and ones on y-axis do the distances between the user and the monitor. The more the user take a right posture, the less the distance will be. The same units will be applied to the ensuing figures unless otherwise specified.
Details of users’ posture fluctuation
At the early stage of the experiments, all the participants kept up their postures. However, during the second half of the experiment, they didn’t. It shows that the longer a user uses a computer, the more the user moves back and forth, left and right, without keeping up the first posture. Generic pattern 2. As the measure time passes, the level of reaction to a warning decreases (See Fig. 4).

User C’s pattern. The user C kept up his right posture for about 4 ∼ 5 minutes. However, after 28 minutes from the start of the experiment, he did for 2 ∼ 3 minutes.
The number of warnings given varies considerably from person to person. However, one thing in common with all the participants is the level of reaction to warning. Although a user receives warnings, the number of times he or she disregards them grows or the duration of right posture decreases as experiment time goes. Generic pattern 3. Personal patterns (e.g., time period of concentration, severity of forward head syndrome) can be identified within one or two hours from the start of the experiment. The user A continued to fluctuate and was given warnings after about 1 hour 40 minutes from the start of the experiment. The user B has a comparatively strong tendency of disregarding warnings. After about 1 hour 11 minutes pass from the start of the experiment, he slouched himself and received warnings frequently. The user C receives warnings throughout the experiment. It shows that his overall posture is in a very bad condition. Actually he turns out to be a patient with severe forward head symptom. The user E distracts his posture every hour after he started his experiment. It means that his time period of concentration is 1 hour. Personal pattern 1. All participants belong to one of three types: forward-head, lean-backward, or compound type. After the experiment, we could categorize the patterns shared by the experiments into three: forward-head, lean-backward, and compound type. The users A, C, D, E, and G belong to the forward-head type, while the user F belongs to the lean-backward type. The user B belongs to the compound type which mixed the forward-head type and the lean-backward type together. Personal pattern 2. Duration of correct posture after receiving warnings is different from person to person.
The users D and E kept up their right postures for more than 15, 10 minutes, respectively, after warnings were given. The user C did for 3 ∼ 5 minutes. In case of B, the duration time is very short as much as 10 ∼ 20 seconds.
In this section, we discuss two issues emerged during the experimentation: how to accustom to the system at the beginning and how to deal with a user distracting severely upon receiving warnings.
The first issue is, how does a user move to an initially measured right posture when he returns after a while? Figure 5 shows the user F receives a number of warnings from the start of the experiment for 30 minutes. The cause behind the result of the experiment is that the users are not fully accustomed to the experiment itself, and that they did forget their right postures. On receiving warnings, they moved excessively to take their seemingly right postures, which were recognized as wrong postures by the system. This didn’t happen with the first prototype system, which adjusts itself to a user. To address this problem, we need to consider how to analyze and compensate the user’s data measured from the start time until the user gets accustomed to the system.

User F’s pattern. The user F received warnings 7 times from the start of the experiment for 30 minutes.
Another issue is how to deal with the case of the participants who distract from his due right posture upon receiving warnings. On receiving warnings, the user B stays with his right posture for 10 ∼ 20 seconds only, after which he returned to his old wrong posture. One measure is to decrease the time interval to give warnings. Under the current system setting, a warning is given when a user stays with wrong postures for more than two minutes. Another is to give a more strong level of warning as the number of warnings given increases. A measure combining those two measures together is also conceivable. In our experiment, we adopted the first measure, which sets the accumulative warning time to one minute from two minutes. The experiment result given in Fig. 6 shows that the first measure is very effective for the user B. To track the change of B’s posture, we analyzed two graphs: one showing distances between the user and the monitor, and another showing the user’s heights.
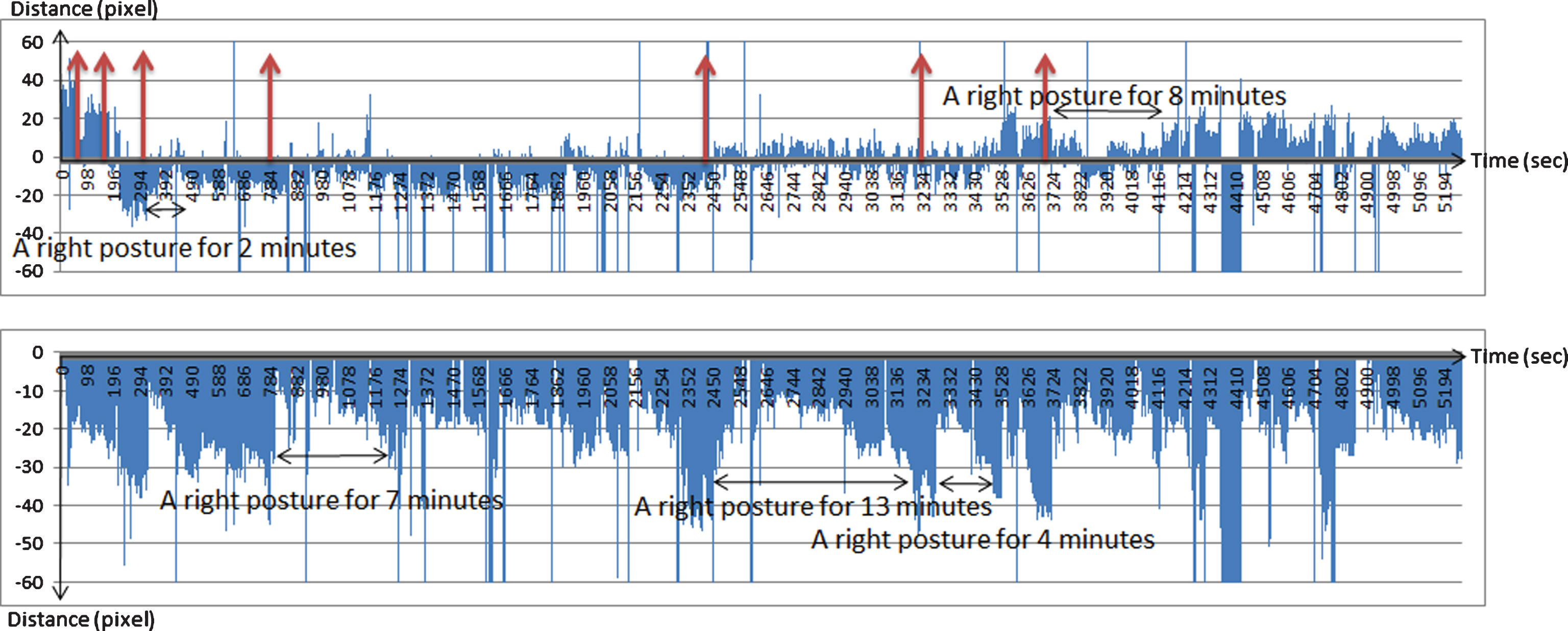
User B’s pattern. (a) The user B received warnings 3 times in less than 5 minutes from the start of the experiment. He stayed his right posture for about 20 seconds on the first and second warning, however, did for 2 minutes on the third warning. (b) After 12 minutes from the start of the experiment, he received another warning and stayed his right posture for 7 minutes. He also stayed his right posture for 13, 4, and 8 minutes, respectively, on succeeding warnings. The values on x-axis denote flow of time in seconds, and ones on y-axis do the height of the user’s face in pixels.
In the paper, we examined the issues related to applying pervasive computing in forward head syndrome. Our studies presented two prototype systems. The first prototype focused on sensing and actuation. But as our preliminary experiment showed, actuation may not be appropriate in a pervasive service for forward head syndrome. We continued our experiment using the second prototype, focusing on sensing and feedback. Throughout the experiment, we confirmed our hypotheses in positive directions. First, we could identify both generic patterns which all participants show and personal patterns which apply to some participants only. Secondly, we also confirmed that a personalized mechanism based on both the analysis of and feedback on a person’s patterns seems to be very effective in the forward head syndromes which require a pervasive service. Particularly, duration of a posture taken, a responsive level to a warning, the level of disregarding the accumulated warnings varies considerably from person to person.
The experiment result has a limitation that it is not based on rigorous statistical data analysis but of subjective, observable data due to the small size of participants, and simplification of measure parameters. In the near future, we need to overcome the limits of the current experiment by accumulating patterns by groups (e.g., by risk level group, by work area group, by age group, by sex group etc.) as well as individually during the extended period and analyzing the long-term effects of the system. While analyzing the enlarged database of patterns, we expect to draw a set of pervasive patterns to effectively prevent forward head posture by each group.
Footnotes
Acknowledgments
This work was supported by the National Research Foundation of Korea (NRF) grant funded by the Korea government (MSIP) (No. 2017R1A2B4001801).