
Abstract
In this paper, based on the idea of separation modelling, through the analysis of ship motion and force, a mathematical model of ship motion under the action of external wind, waves and current is established in 6 free direction modelling. According to the force analysis of the ship, the calculation model of the 6-degree-of-freedom nude hull hydrodynamics and torque, the 6-DOF fluid dynamics and torque, the 6-DOF external force interference force and the moment, and the thrust and thrust of the pod propeller are established. Computing model. Finally, the computer simulation is carried out, and the fourth-order Runge-Kutta algorithm of numerical analysis method is used to calculate the 6-degree-of-freedom motion state of the ship. Through the experimental analysis and comparison with the related 6-degree-of-freedom literature, the 6-degree-of-freedom mathematical model designed in this paper is basically fulfil requirements. At the same time, according to the characteristics of ship dynamic positioning, the hybrid intelligent control strategy is used to design an adaptive dynamic positioning controller based on hybrid intelligent control. By testing and analysing the designed dynamic positioning controller, the results show that it responds in time and rises. The time is basically within the controllable range, has a certain ability to resist external environment, has good robustness, and the overshoot rate is relatively low, and the control quality is also good.
Keywords
Introduction
In today’s society, with the continuous development of the economy and society, the demand for resources is constantly increasing. However, in the ocean, there are abundant resources such as oil and gas, and human beings will develop seas faster and faster. Relevant research work on mooring methods such as the “Ocean Oil 981 semi-submersible deep-sea drilling platform” modernized in floating production systems such as the South China Sea will attract the attention of the international community. The mooring of the floating production system under the general conditions of water depth mainly adopts the mooring system. As the water depth increases, not only will the anchor chain length and strength of the mooring system be continuously increased, but also the throwing The degree of difficulty will also increase steadily, which will lead to a rapid increase in weight, and the operation of the sea chain will become more complicated, which will lead to more serious challenges in its positioning control function [1].
In the various operations of simulating the ship’s maneuvering and revolving, the mathematical model of the ship’s motion determines the various states and realism of the ship’s motion. The fidelity of the ship’s navigation simulation is determined by the accuracy of the ship’s mathematical model. Direct decision. The mathematical model of ship motion is the top priority in the motion and control of ships. Strive to establish a more accurate and accurate mathematical model of ship motion is one of the keys to simulating ship motion and navigation simulation systems. At present, the mathematical models of various types of ship motion developed in China are mostly three- or four-degree-of-freedom ship motion simulation. However, the actual situation is that the ship is actually moving in the direction of six degrees of freedom [2]. If the complicated conditions of the high sea conditions are considered, the mathematical model of the existing three-degree-of-freedom ship motion direction is not sufficient, and it should be perfected into a six-degree-of-freedom motion mathematical model to make it more accurate. The various movements of the simulated ship are carried out.
The research in this paper is based on the maneuvering motion simulation and related control of various sea conditions of semi-submersible ships. Due to the complexity of external environmental disturbances, ships will be constantly exposed to wind, waves and currents when sailing on the waves. Interfering forces act and are subject to very unstable environmental disturbances. This paper will focus on the responsive mathematical model of ship motion in the 6-degree-of-freedom direction of semi-submersible ships and the ship motion heading control in 3 degrees of freedom and the motion simulation of dynamic positioning system.
Dynamic positioning system concept and introduction
Dynamic positioning system definition
DP (dynamic positioning system) technology [3] has been widely used in today’s semi-submersible ships. Semi-submersible ships refer to the hull with most of the hulls that can be submerged during loading and unloading, and in normal state of draught during navigation. A special feature of the ship. The semi-submersible works like a submarine in terms of working principle, but the difference is that the submarine needs to fully enter the water, but the semi-submersible ship only needs to dive to half or most of the submarine, which is the largest submarine and semi-submersible. The difference is that there are a lot of ballast tanks inside the hull of the semi-submersible ship. The dive and floating during loading and unloading operations are all done by driving ballast water or discharging ballast water. This type of vessel is mainly used to transport oversized cargo such as large steel structures, floating docks, offshore platforms, etc. Because of the difficulty in transporting oversized cargo, semi-submersible ships need to have good performance and special hull structure to meet the safety requirements of transportation. Therefore, it is a high-tech, high-value-added semi-submersible ship.
DP (dynamic positioning) is mostly started from floating ships in the offshore, so such ships generally need to perform the specific functions given, and at the same time, the drivers who drive the ships on the power can obtain the corresponding expenses. The functions of such ships generally include, for example, drilling oil – supporting diving operations – firefighting – pipe laying – mining, etc., in the case of any of them, in order to accomplish their given tasks. The ship dynamic positioning system has a very important role and significance.
DP system composition
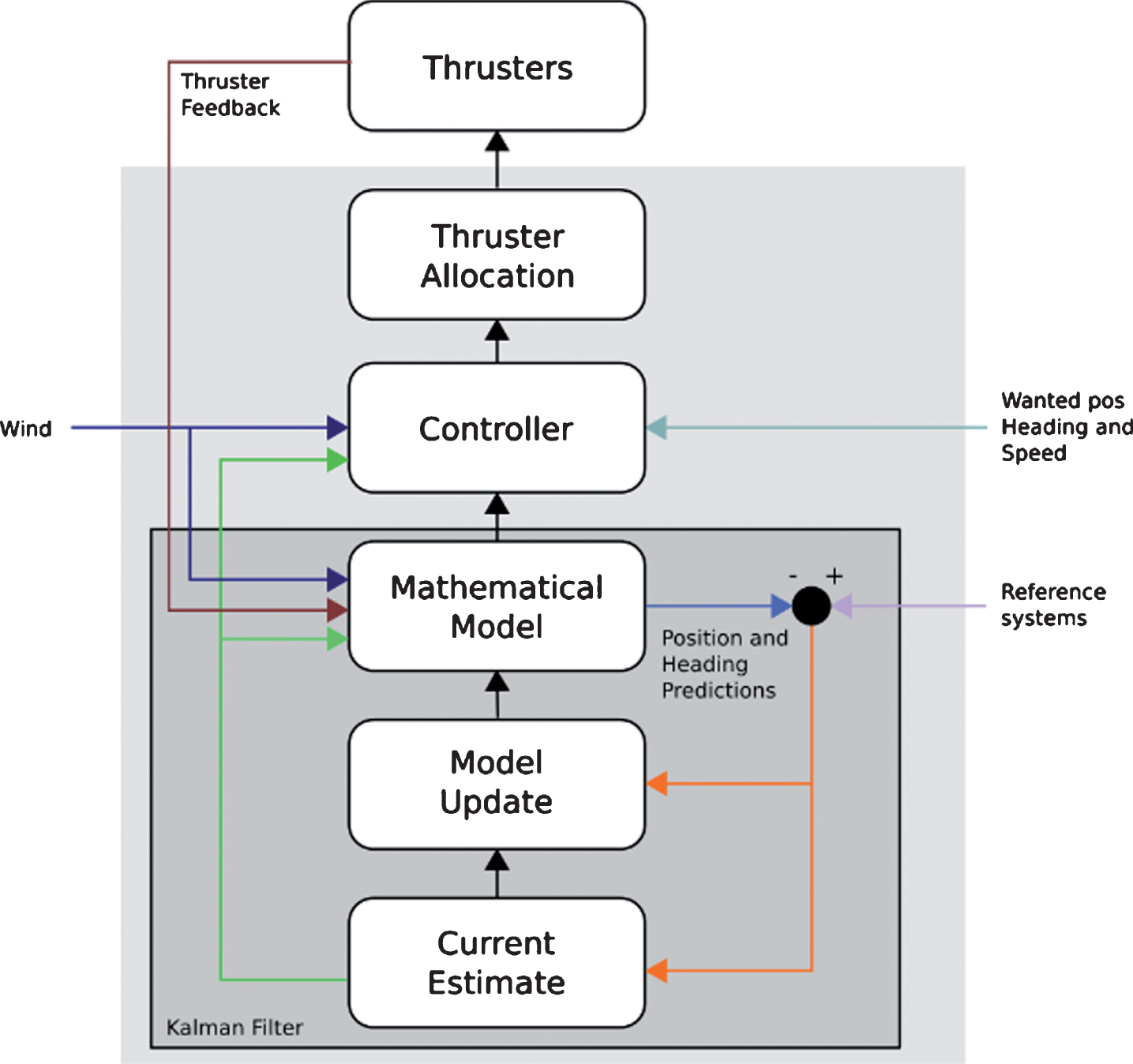
Figure 1 is a schematic diagram of a DP system consisting of a sensor measurement system, a controller, an energy management, and a propulsion system. DP (dynamic positioning) was first and foremost used in various types of ships for the exploration of offshore oil – special-purpose ships requiring deep-sea fixed-point operations such as cable remote-controlled underwater submersible (ROV) mother ships and fire boats. Since the 1980s, the dynamic positioning in civil applications has been widely used: national marine survey vessels – marine drilling vessels – salvage vessels – deep sea collection ore vessels – marine cabling operations – marine pipeline types Ship-port dredging type ship-port or air-fighting fire-fighting type ship-port or deep-sea heavy-duty ship-deep-sea diving logistics support type ship-offshore floating platform system (FPSO)-sea special type working type positioning type Various special-type dynamic positioning ships such as ships.
DP system schematic.
Degree of freedom equation
From the knowledge of Newtonian rigid body dynamics [4], we can see that the momentum and momentum moment theorem can be used to represent the motion in any direction, so using the knowledge of Newtonian rigid body dynamics, we can get the equation of 6 degrees of freedom of the ship, they will The basic structure of the mathematical model of ship motion is prepared for the study of the 6-degree-of-freedom ship motion. The basic form is as follows:
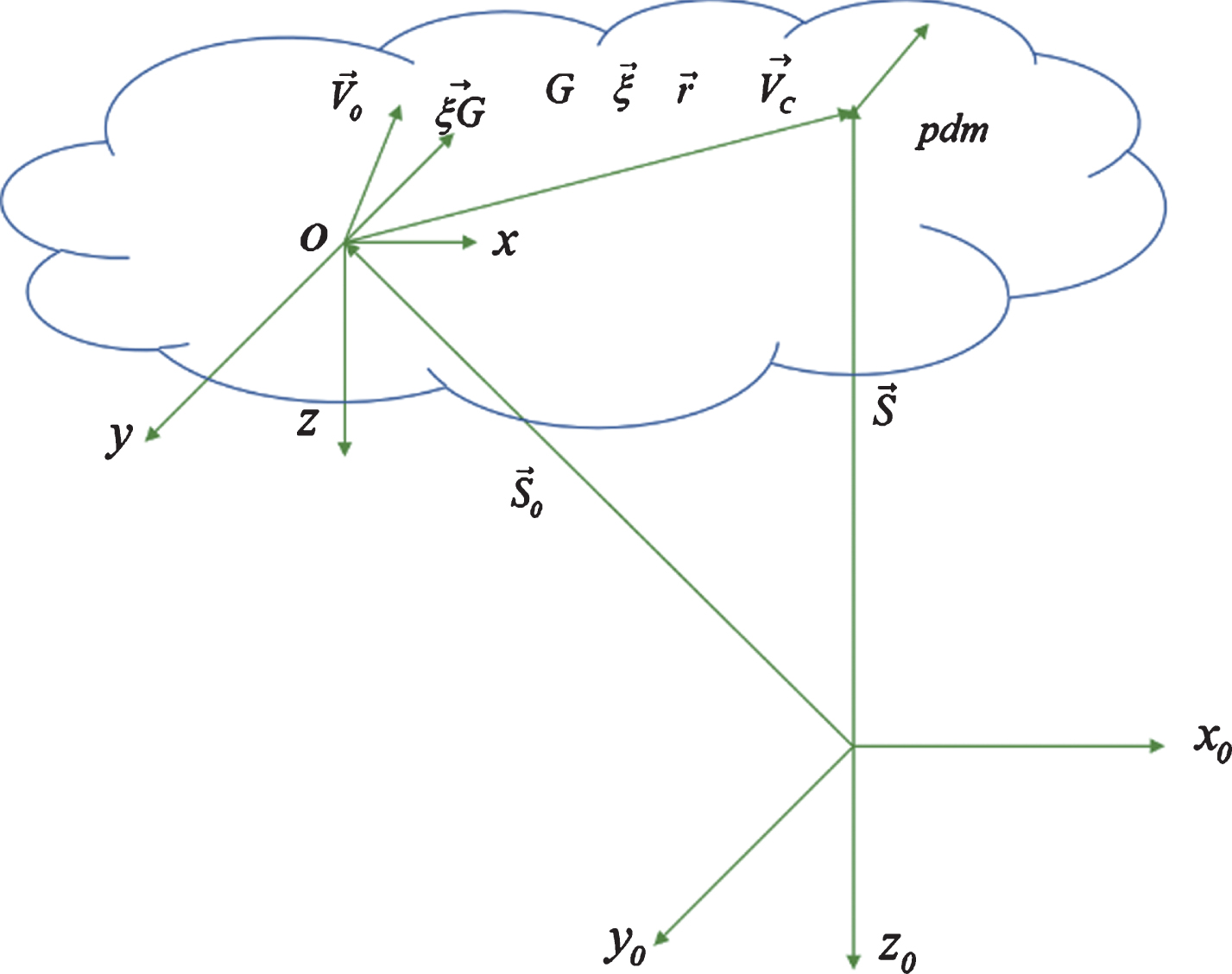
Where is the external force; is the vector sum of the moments pointing to the fixed point a; is the total momentum; is the total momentum moment of the point a. In order to better analyze the equation: the origin O of the coordinate system can be placed in even if the two points overlap, as shown in Fig. 2.
Momentum and momentum moment diagram.
Wind disturbance to the force of the ship.
Where is the vector of the velocity value at any point p on the rigid body, and dm is the micro-element at the p-point. G is the centre of gravity and is the reference point. is the translational speed, and is the radial direction of p to G. is the radial diameter from point O to point p, is the radial diameter of p to O, is the radial diameter of O top, and is the radial diameter from the centre of gravity G to the origin 0.
Where I xx , I yy , I zz is the moment of inertia of Ox, Oy, Oz isometric, and I xy , I yz , I zx is the moment of inertia of each plane of xy, yz, zx.
Generally speaking, the fluid is assumed to be the ideal fluid. Under this premise, the ship is only subjected to the hydrodynamic force and torque of the inertia type, but the fluid to be received in the actual process is not the fluid as the ideal fluid, so the viscosity of the fluid needs to be considered at this time. In addition, the viscous forces and moments experienced by the ship during its voyage are related not only to the parameters of the ship itself but also to the density factor of the fluid. There are usually two methods for calculating the nonlinear derivatives: l. For the approximate estimation formula of the hydrodynamic derivative, the theoretical calculation results are used to repair the ship with a series of constrained ship model test data, and an approximate estimation of the hydrodynamic derivative is given. Formula 2; is the use of multiple regression analysis, a series of constrained ship model test results for analysis, not only for the estimation of linear hydrodynamic derivatives, but also for nonlinear hydrodynamic derivatives [5].
At present, there are two main methods for estimating fluid dynamics: “Guidao model” and the model. In contrast, the “Guidao model” is more suitable for the simulation ship of this paper, which not only takes into account the influencing factors of the draft difference, and it is obtained by regression test on the ship model test data of modern utility ship model. The fluid torque expression of the horizontal plane is as follows:
Under the linear model condition, it is assumed that the ship’s manoeuvring motion is a small drift angle. At this time, the theory of the slender body is adopted, but this model usually has a relatively small error, so it cannot be ignored when considering the nonlinear viscous fluid dynamics. Its influence, first of all, first divided the viscous fluid dynamics and torque into two nonlinear and linear terms.
The estimation formula and meaning of each sub-item in formula (4) can be elaborated below. The hydrodynamic derivative is a dimension of the actual size. The mass of the ship, the speed of the ship and the physical parameters of the fluid medium will affect the value of the ship. In order to make the ship model test data directly available on the prototype. By using the principle of similarity, the value can be dimensionless processed to obtain a dimensionless hydrodynamic derivative. For example, a method of making a dimensioned physical quantity Q a dimensionless quantity: use Q to remove a standard metric Q0, which is labelled as Q’, as follows:
There are generally two types of standard measurement units, Q0, which also constitute the hydrodynamic derivative values of two types of infinite tempering. One of them was proposed by SNAME (American Society of Naval Architecture and Marine Engineering) and was called “Prime System"; the other was proposed by Norbbin of SSPA (Swedish Ship Research Centre) and called “BisSystem". “Prime System” has two forms: one is the reference area L2; the other is the reference area Ld, and the two forms of the standard metric Q0 are given in Table 1 [6]. In Table 1, V is the designed speed, V is the drainage volume of the ship in stationary conditions, p is the density of the fluid, g is the magnitude of the gravitational acceleration, L is the length of the ship, and d is the size of the ship’s draft.
Standard metric conversions for “PrimeSystem” and “BisSyste”
The mathematical model of ship motion is divided into two categories: linearized mathematical model and nonlinear mathematical model. The study of ship mathematical models usually has two purposes: one is to establish a ship motion simulator (also known as a ship motion simulator) with different degrees of precision, which is used to study the ship’s maneuvering characteristics through simulation, and to carry out the ship motion closed-loop control system. Research, evaluation of ship motion controller performance. This model must be non-linear to contain as much of the mechanistic details as possible; the other model is intended for ship motion controller design, which is primarily linear, as the linear feedback control theory is still capable A unique cybernetic branch that provides a systematic approach to controller design. When referring to neural network control or fuzzy control, a mathematical model of nonlinear ship motion can provide training and learning data.
Nonlinear mathematical model of ship plane motion
Nonlinear mathematical model of ship plane motion Apply Equation (6) to solve the basic variable of ship plane motion. The structural form of fluid dynamics X, Y and moment N must be discussed in detail. In the study, the hull, propeller and rudder are considered as a whole. At this time, X, Y, N will be nonlinear functions of the moving speed (u, v), the rotational angular velocity (r), their time derivative
Following Abkowitz’s research scheme, only the first-order small quantity is retained when the fluid dynamics X, Y, N are expanded into Taylor series [6], and linearization is also performed at the left end of the ship motion basic equation to obtain the plane motion linear mathematics. The model has the following equation:
The external natural environment interferes with the interference force on the hull and so on. When the ship sails on the sea, it will be affected by wind, waves, etc., and these external forces will have a great interference effect on the cattle movement, so when establishing the 6-degree-freedom MMG mathematical model of the semi-submersible ship, and These factors must also be considered when establishing a control model.
Wind interference
Wind refers to the air flow generated by the irregular changes in atmospheric pressure caused by the temperature difference formed by the surface of the earth. The wind is generated on the ground surface or on the surface of the sea. The wind speed is constantly changing. The direction is also constantly changing. As shown in the figure below, it is a schematic diagram of the interference of wind on the force of the ship.
Wave interference
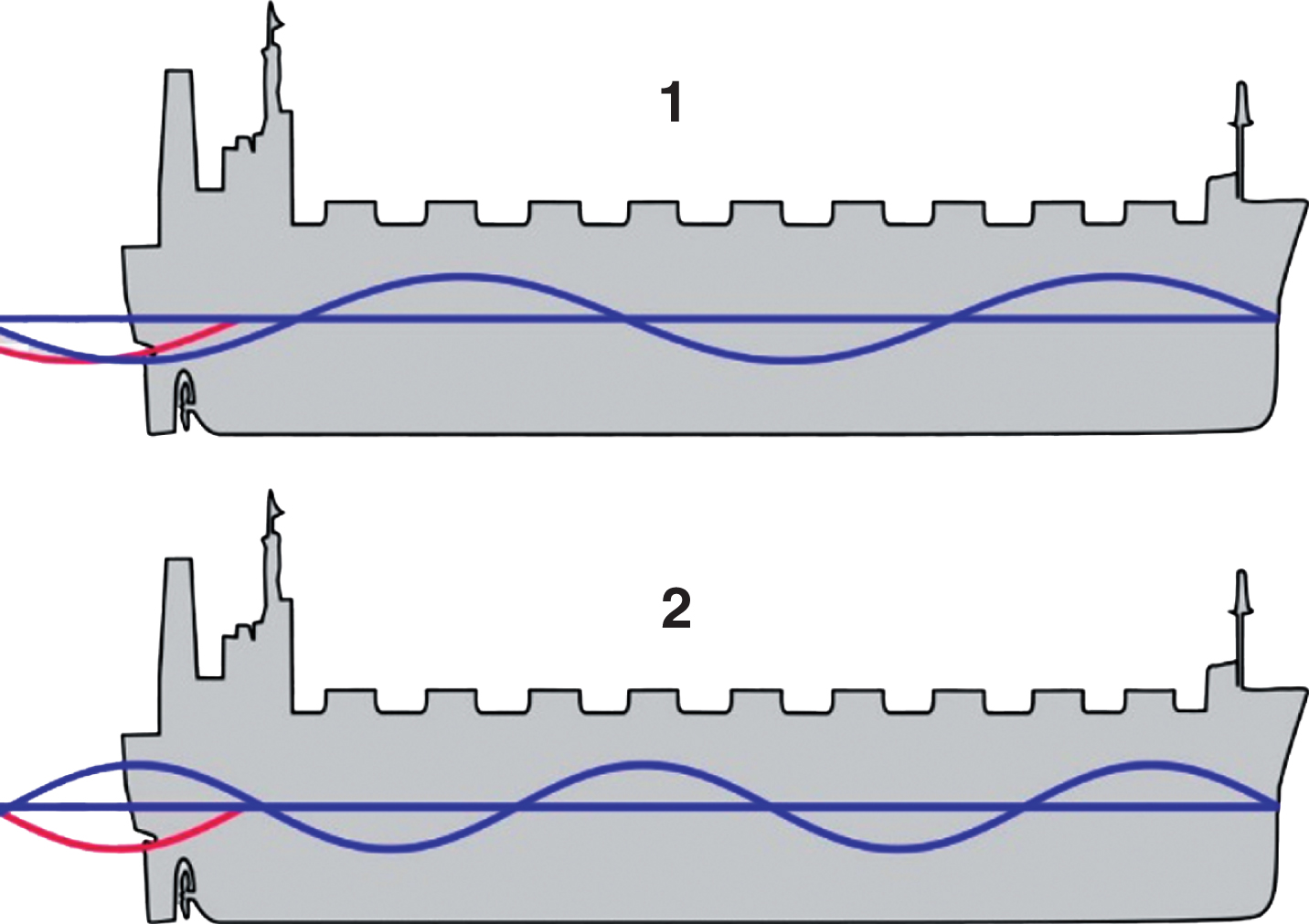
Waves are divided into regular waves and irregular waves. Regular waves refer to moving waves in a fixed direction. The irregular waves acting on a thousand hulls can be regarded as the superposition of all the tiny regular waves acting on the ship. As shown below.
Flow interference
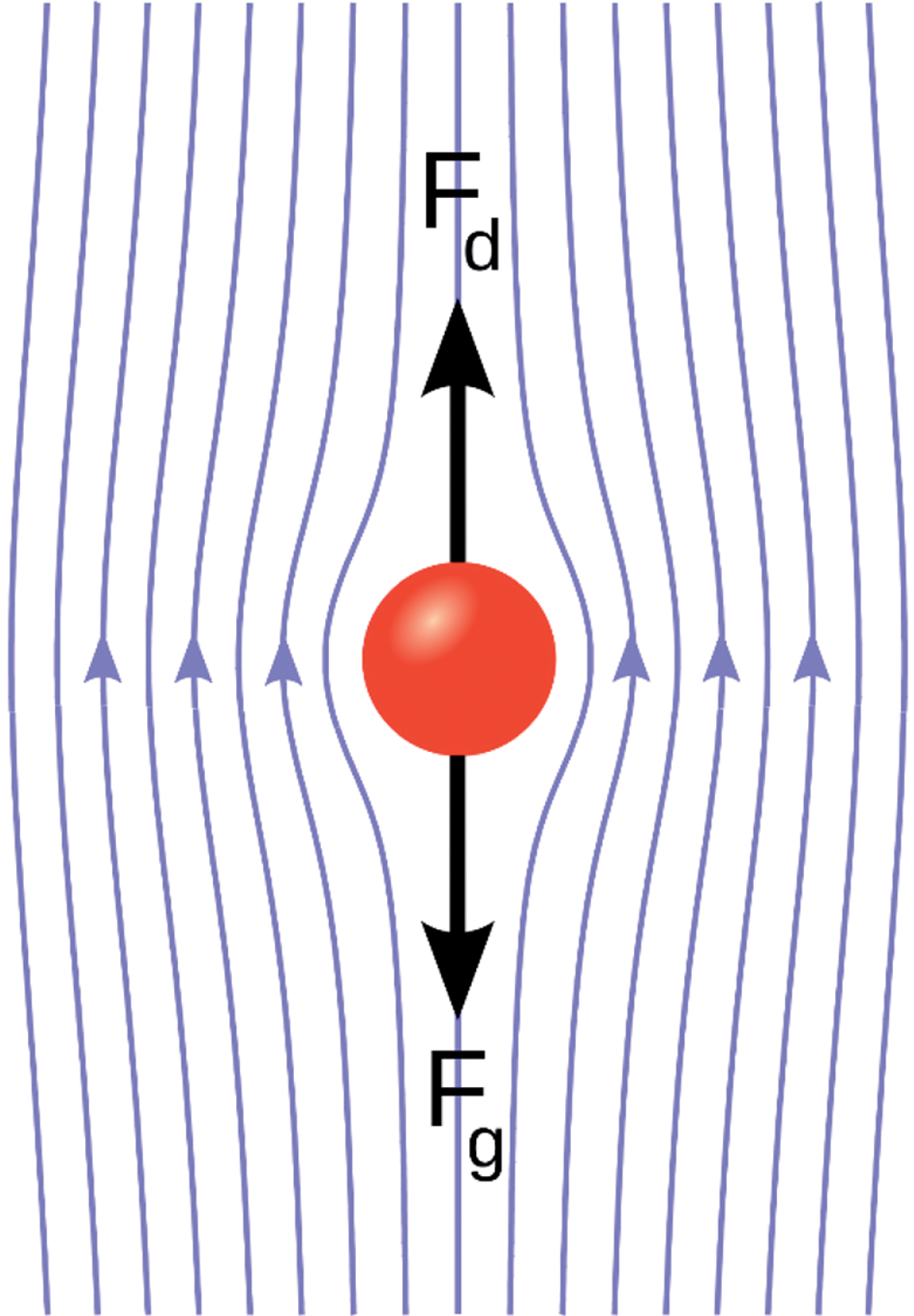
So far, most of the high-frequency wave motion mathematical models for the flow processing: mostly the assumption of uniformity and a certain constant, that is, the direction and value of the flow velocity does not change with the position of time and space points.
This paper also assumes that the flow subjected to the flow is a uniform flow. In the process of hydrodynamics and moments on the ship, the speed of the ship is relative to the speed of the water rather than the ground. The absolute speed method is shown in Fig. 5. In the nautical technology, the direction of the conventional definition of the flow is the reversal of the wind. There has been a saying that “the wind is coming and going”
Rules and irregular waves interfere with the ship.
Flow interference.
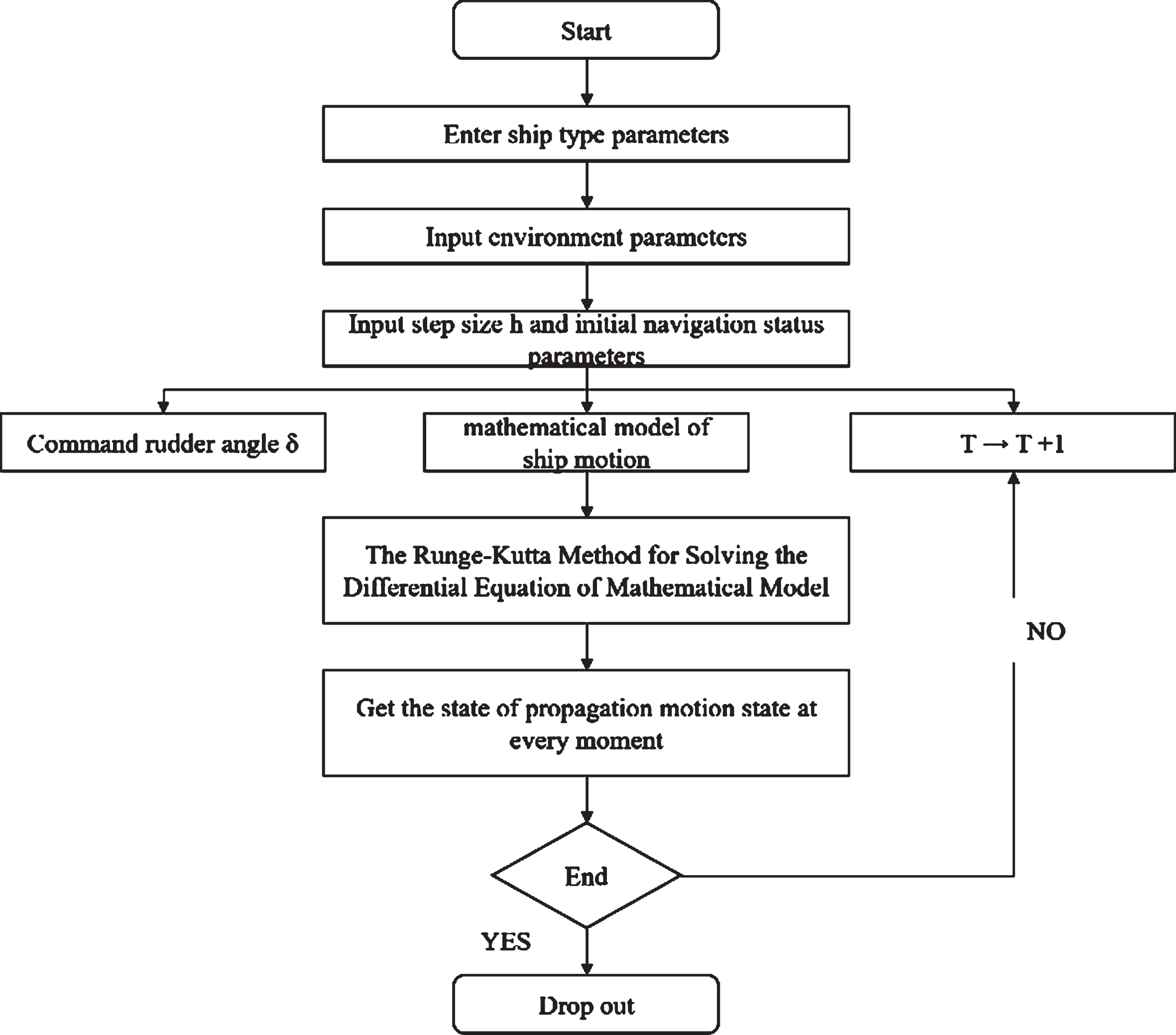
Program framework.
In this paper, the propeller is used to simulate the mother ship. One of the propellers, also known as the POD propeller, is a new type of marine propulsion, and the research in this field is quite noticeable. The pod propeller is placed on the outside of the ship with the propeller. This has the advantage that it greatly saves the space of the ship and provides great convenience for the design, construction and use of the ship. The type of mother ship is a semi-submersible ship using this type of thruster [7].
The working conditions of the propeller can be divided into the following four quadrants, which can be roughly divided into: forward into the paddle, reverse in front of the paddle, reverse after the boat is retracted, and reverse after the boat is retracted, as shown in Table 2.
Quadrant analysis of propeller working conditions
Quadrant analysis of propeller working conditions
There are two methods for the drowning test of the general propeller model: 1. One method is the test method in which the speed is constant and the speed is changed in the towed pool; 2. The other method is to enter the air bubble The method of changing the speed and changing the speed is tested. For the same type of propeller, the hydrophobic properties obtained through the test are usually expressed in the form of a map.
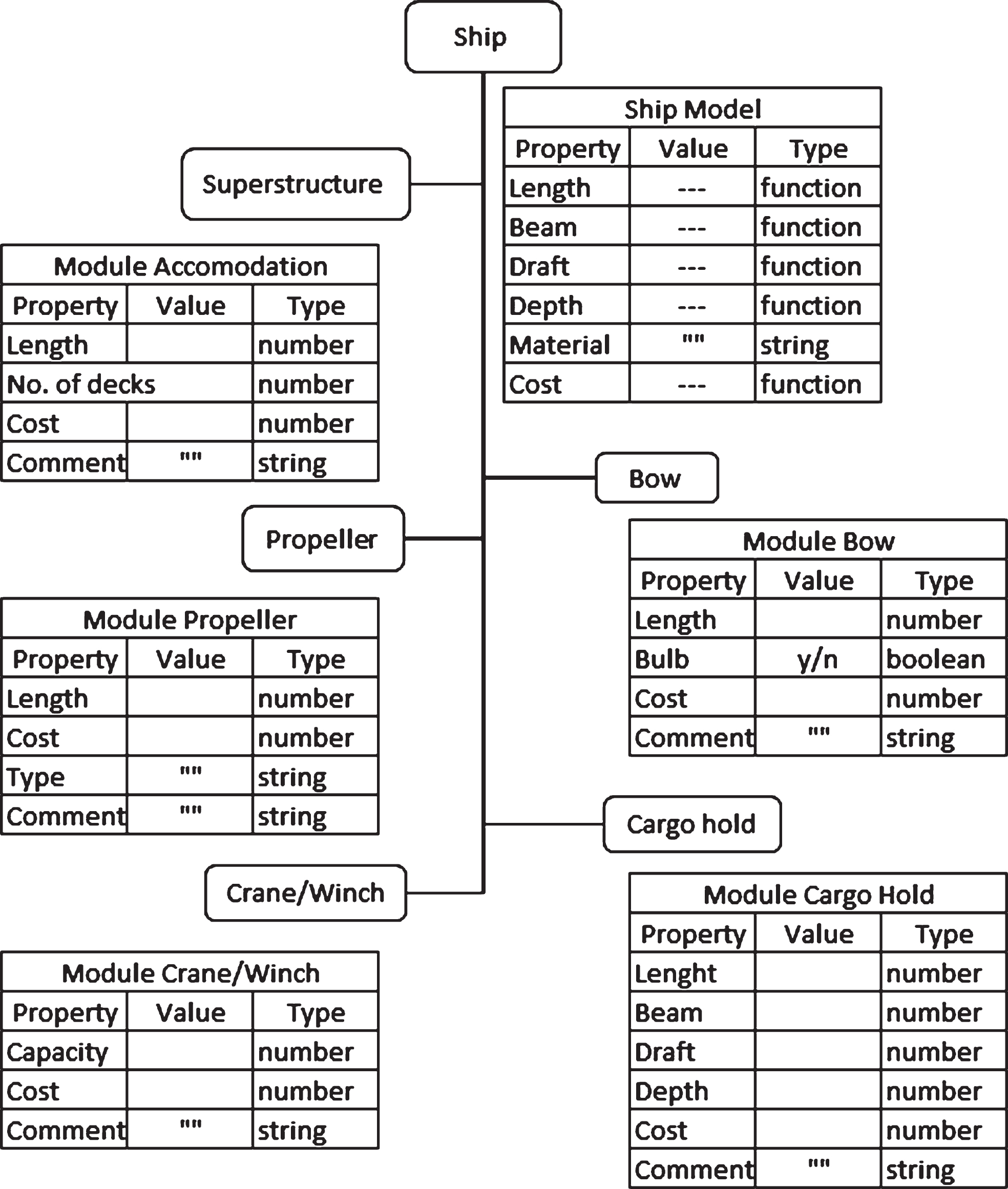
Program principle design
On the basis of previous studies, the mathematical motion model of degree of freedom is established and improved, and its verification analysis is carried out to confirm the accuracy and usability of the model. The principle of program modeling is as follows.
Simulation results and data analysis
The specific parameters and interferences of the ship’s main scale are as follows.
Figures 6 and 7 show the horizontal and vertical simulation curves for a given propeller at 45° and 225°, respectively: where the horizontal axis is time t (seconds) and the vertical axis is (meters per second).
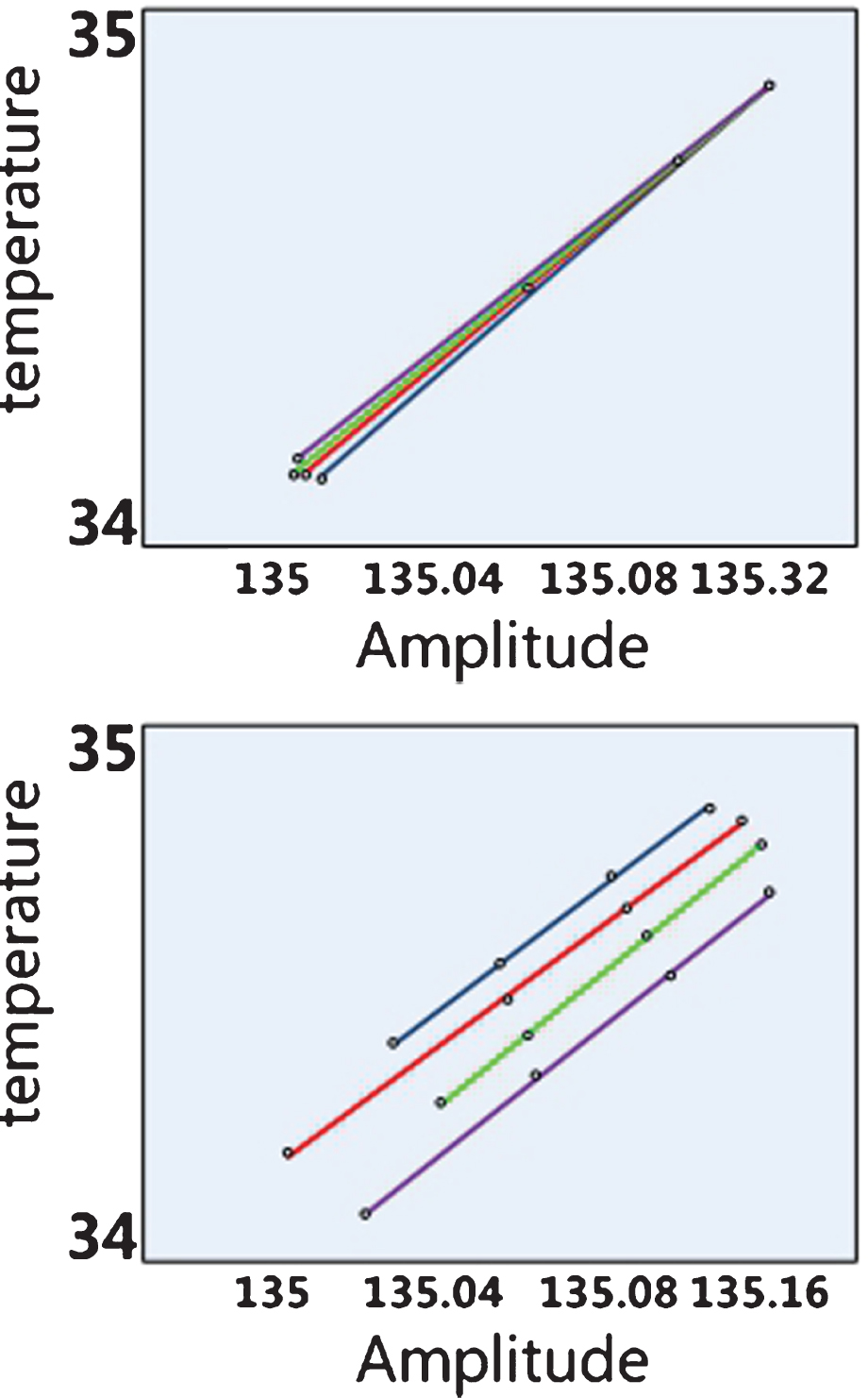
Simulation of horizontal and vertical curves of the propeller at 45°.
Simulation platform construction
The target female ship to be simulated in this paper is the “Taiankou” semi-submersible ship. As described in the previous section, by summarizing and summarizing, all the scale parameters of the ship are summarized as shown in Table 4.
Environmental interference
Environmental interference
Summary of performance parameters of “Taiankou” semi-submersible ship
The main propulsion system of the ship mainly uses two pod-type power propellers with a power of 4700kw. The speed range is 0– 155r/min, double propellers, 3 blades per paddle, and its diameter is 4.0m. The performance parameters of the propeller are shown in Table 5 below.
Main performance parameters of propeller (SSP)
The simulation tools used in this paper include the MATLAB program and the Simulink module. It is convenient and concise to use this module to build the module based on the controller designed in this paper. Among them, Simulin1 is one of the important components in MATLAB. It provides an integrated environment for dynamic system modeling, simulation and comprehensive analysis, and it does not require a lot of programming in this environment, but only through simple With the mouse operation, a relatively complicated system can be constructed, and it has the following advantages: wide adaptability, high efficiency, flexibility, clear process structure, fine simulation, actual closeness, and the like.
As the ship is in the process of navigation, it will be interfered by various external forces. The course of the ship will inevitably deviate from the original correct course, which will cause the bow to deviate from the original correct route [8]. The ship deviates from the voyage, so a deviation of the rudder angle of the propeller is given. At this time, an opposite rudder angle is given to the ship, so that the ship will gradually recover after receiving the torque of the opposite ship. When passing to the original route, and returning to the original correct route, the value of the yaw direction will gradually decrease. Therefore, the deviation of the rudder angle of the propeller is given at this time, so that the ship’s yaw rate table at this time Small, similar If the ship exceeds the original heading during the reversal, then an opposite rudder angle is given. Repeat this until the correct heading is reached. According to this design idea, the heading controller can be designed. As shown below.
Simulation algorithm architecture
Design of System Controller Based on Genetic Algorithm-PID Control under Normal Operating Conditions
Most of the controller algorithms in the design process should be patched together by various parameters to achieve the optimal effect. In this paper, we design the controller of genetic algorithm-PID control by the following steps:
The calculation of the performance function is based on the accumulation of heading errors, and the program flow of the heading control can be obtained, so it is set up under the interference of different sea conditions.
Design of system controller based on hybrid intelligent-PID control under high sea conditions.
Under the condition of high sea conditions, the ship navigation process is difficult to adjust its parameters due to its lack of self-adaptive ability to change its dynamic characteristics and sea state. Therefore, the accuracy of the ship is difficult to guarantee only by PID control. In order to achieve a certain degree of control accuracy, a PID and hybrid intelligent control strategy is used, as shown in Fig. 10. However, after studying the neural network and fuzzy control separately, a hybrid intelligent control strategy combining neural network and fuzzy control is adopted. Similarly, in order to obtain a more accurate model of heading control, a hybrid control model combining hybrid intelligent control and traditional PID control is designed according to the characteristics of high sea conditions.

Transverse and longitudinal simulation curves of the propeller at 225°.
Principle of heading controller.
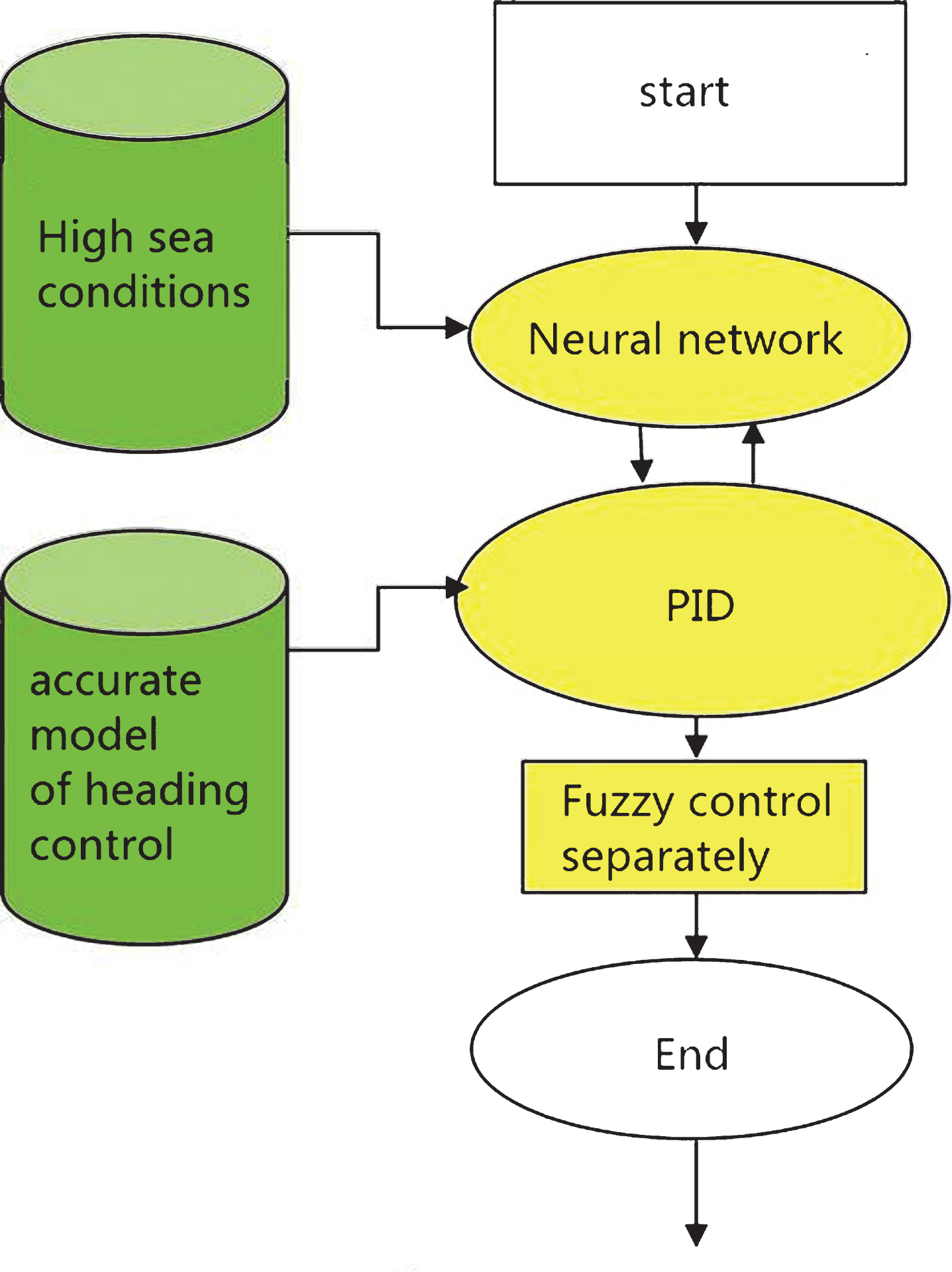
Block diagram of PJD-hybrid intelligent control principle.
As shown in Fig. 11, it can be seen that the heading controlled by the genetic algorithm-PID control algorithm basically reaches the target heading in about 100s, but the conventional PID control gradually corrects the heading to the target heading direction after 200s, which shows that The genetic algorithm-PID control designed in this paper makes up for the shortcomings of the traditional PID control in a certain degree. In contrast, it has obvious characteristics of good control characteristics, low hysteresis and higher precision.
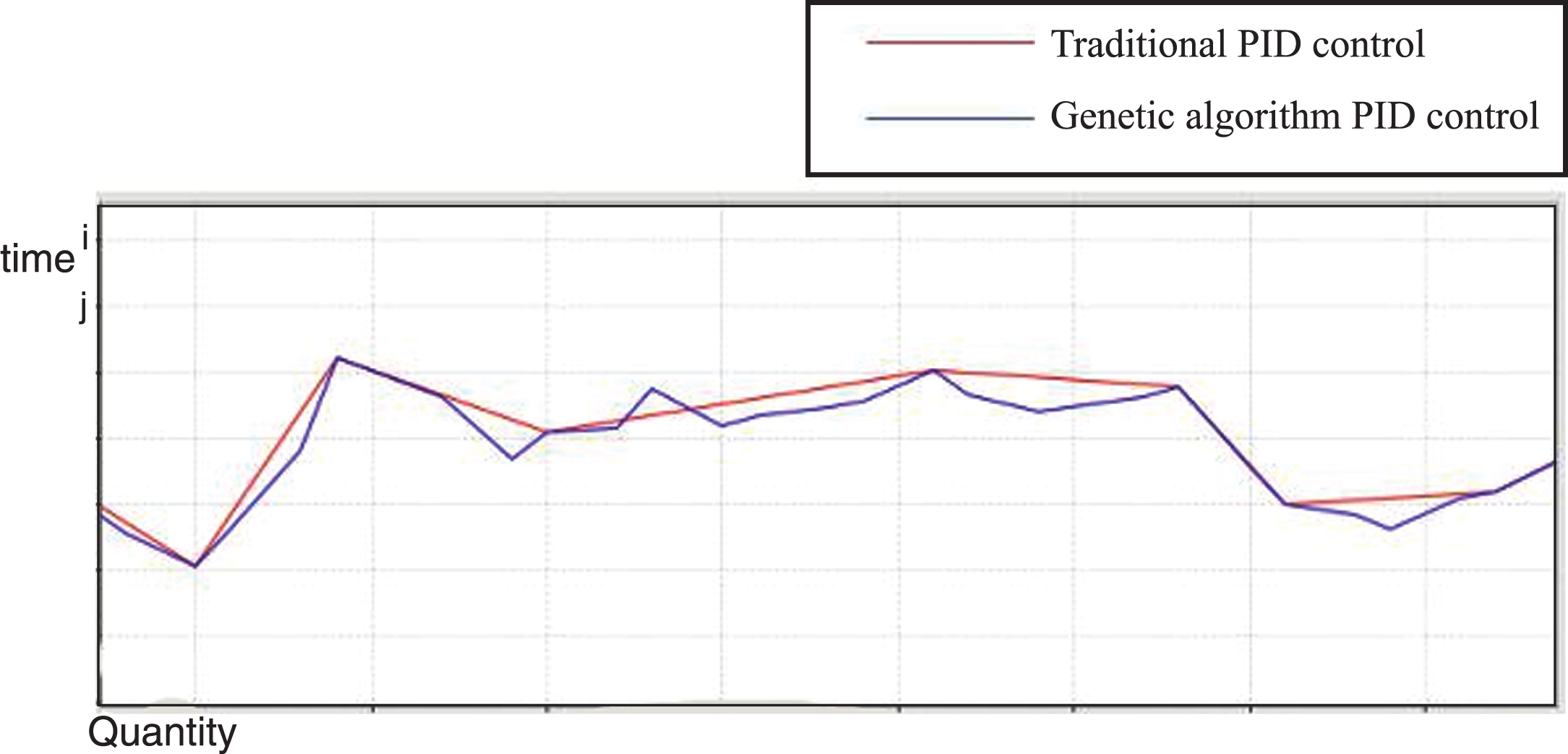
Genetic algorithm – comparison of PID and traditional PID algorithm.
In the process of eliminating the deviation angle of the heading angle, the effect of the traditional PID control in this process is not too obvious in the whole simulation test, until the target of basic elimination is reached after 700s simulation, and the genetic algorithm-PID control algorithm has The better control performance has basically returned to the position of 0 when the simulation time is 100s. By comparison, it can be found that the genetic algorithm-PID controller designed in this paper has a better elimination effect on the deviation than the ordinary PID control method. At the same time, it can be seen that the effect of the PID control reflected in the heading error curve is not very satisfactory, showing the inadequacies of the process according to the empirical parameter setting process.
This paper first discusses the establishment method of general ship motion mathematical model, and uses the idea of MMG separation modelling to establish the mathematical model of ship motion in 6 degrees of freedom of the ship. In the process of verifying the test results, 6 free curves and the results of the related 6-DOF model literature are compared. The results show that the responsive 6-DOF model established in this paper has higher accuracy. At the same time, this paper studies the modern ship motion control strategy algorithm, and selects different control strategies for semi-submersible ships under different working conditions and high sea conditions. This paper mainly introduces hybrid intelligence such as traditional PID algorithm and genetic algorithm. The control strategy is based on the different characteristics of common working conditions and high sea conditions. For common working conditions, the combination of genetic algorithm and PID control is adopted.
Disclosure statement
No potential conflict of interest was reported by the authors.