In this study, we present a generalized concept of Seikkala differentiability for fuzzy functions. It has been shown that this concept and the lateral H-differentiability lead us to the same results. Fuzzy differential transform method (FDTM) is applied to solve fuzzy Volterra integro-differential equations. In order to show the effectiveness of this method some illustrative examples are given.
Fuzzy differential equation is a very useful tool to model dynamical systems under possibilistic uncertainty [8]. The topic of fuzzy integral and integro-differential equations has been developed a lot in recent years [19–25]. The solutions of fuzzy differential, integral and integro-differential equations have a major role in the fields of science and engineering [9–11]. When a physical system is modeled, it finally gives a differential, an integral or an intero-differential equation.
There are lots of different types of differentiability in the literature. In 1983, Puri and Ralescu first introduce the concept of Hukuhara differentiability [2]. The approach based on the Hukuhara derivative has the disadvantage that a differentiable function has increasing length of its support interval [32]. This is not always a realistic assumption. If g : (a, b) → R is differentiable on x0 ∈ (a, b) with g′ (x0) <0, then f (x) = c . g (x) , ∀ x ∈ (a, b) where c is a fuzzy number, is not Hukuhara differentiable. This is a big shortcoming of Hukuhara derivative. Then in 1987S. Seikkala introduces Seikkala derivative [3]. Seikkala derivative is actually defined by one of the property by Hukuhara derivative and both the derivative signifies the same. Although the definition of Seikkala derivative is easier to understand than the definition of Hukuhara derivative but it has the same disadvantages as the Hukuhara derivative. So in 2005 Bede and Gal [14] introduce strongly generalized differentiability and weakly generalized differentiability of fuzzy number valued function. These two concepts of differentiability solve the above mentioned shortcoming of Hukuhara and Seikkala derivative but these have a disadvantage compared to Hukuhara and Seikkala derivative that is a fuzzy differential equation has no unique solution. Then L. Stefanini and B. Bede [16] introduce fuzzy gH-derivative which coincides with the concept of weakly generalized differentiability. Again Bede and Stefanini [17] introduce another concept of fuzzy derivative, fuzzy g-derivative, which is the most general among the previous definitions. In fact fuzzy gH-derivative and fuzzy g-derivative coincide whenever gH-difference exists. Since, in the last two cases of strongly generalized differentiability, the derivative is trivial because it is reduced to crisp element. There are other works also on fuzzy derivative [5, 33] where they redefine fuzzy derivative by considering fist two cases of strongly generalized differentiability and neglect last two cases of strongly generalized differentiability. Barros and Pedro [12] introduce a new concept of fuzzy derivatives, interactive derivatives, by using interactive fuzzy differences.
Lots of work has been done to solve fuzzy integral and integro-differential equations [4, 26–31]. There are very few works on numerical solution of fuzzy Volterra integro-differential equations. Here we have used FDTM which is an analytical-numerical and computer programming friendly technique that depends on Taylor series. DTM was first introduced by Zhou with an application in electrical circuits [15]. In this paper, generalized Seikkala derivative has been introduced and its properties have been given in Section 3. FDTM and its properties have been given in Section 4. Finally illustrative examples and a brief conclusion are provided.
Preliminaries
Definition 2.1. Let E be the set of all upper semi continuous normal convex fuzzy numbers with bounded α-cut intervals. It means if v ∈ E then the α-cut set is a closed bounded interval which is denoted by
For arbitrary uα = [u1, u2] , vα = [v1, v2] and k ≥ 0, addition (uα + vα) and multiplication by k are defined as
and each y ∈ R can be regarded as a fuzzy number defined by
The Hausdorff distance between fuzzy numbers given by D : E × E → R+ ∪ {0}
It is easy to see that D is a metric in E and has the following properties (see [4])
D (u ⊕ w, v ⊕ w) = D (u, v) , ∀ u, v, w ∈ E,
D (k ⊙ u, k ⊙ v) = |k|D (u, v) , ∀ k ∈ R, u, v ∈ E
D (u ⊕ v, w ⊕ e) ≤ D (u, w) + D (v, e) , ∀ u, v, w, e ∈ E,
(D, E) is a complete metric space.
Definition 2.2. (see [1]) Let f : R → E be a fuzzy valued function. If for arbitrary fixed t0 ∈ R and ɛ > 0, ∃ a δ > 0 such that |t - t0| < δ ⇒ D (f (t) , f (t0)) < ɛ, f is said to be continuous.
Definition 2.3. (see [2]) Let x, y ∈ E. If there exist z ∈ E such that x = y + z, then z is called the H-difference of x and y and it is denoted by x ⊖ y .
Definition 2.4. (see [2]) A function f : (a, b) → E is called H-differentiable on x0 ∈ (a, b) if for h > 0 sufficiently small there exist the H-differences f (x0 + h) ⊖ f (x0) , f (x0) ⊖ f (x0 - h) and an element f′ (x0) ∈ E such that
Definition 2.5. (see [3]) The S-derivative (Seikkala derivative) at x0 ∈ (a, b) of a fuzzy-number-valued function f : (a, b) → E is defined by
provided that it defines a fuzzy number f′ (x0) ∈ E .
Definition 2.6. (see [5]) Let f : (a, b) → E and x0 ∈ (a, b). One says f is (1)-differentiable at x0, if there exists an element f′ (x0) ∈ E such that for all h > 0 sufficiently small there exist f (x0 + h) ⊖ f (x0) , f (x0) ⊖ f (x0 - h) and the limits (in the metric D) f is (2)-differentiable at x0, if there exists an element f′ (x0) ∈ E such that for all h < 0 sufficiently small there exist f (x0 + h) ⊖ f (x0) , f (x0) ⊖ f (x0 - h) and the limits (in the metric D)
Generalized Seikkala derivative
Let f : (a, b) → E and the functions f1 (x, α) and f2 (x, α) are continuously differentiable with respect to x, uniformly continuous with respect to α ∈ [0, 1] . Then f is H-differentiable if and only if it is S-differentiable and the two derivatives coincide (see Remark 8.27 in [6]). So, S-derivative and H-derivative has the same shortcoming which has been solved by introducing strongly generalized derivative in [14] which is same as Definition 2.6. This shortcoming can be also solved by introducing generalized concept of S-differentiability as follows.
Definition 3.1. Let f : (a, b) → E and x0 ∈ (a, b) . Then the generalized Seikkala derivative (gS-derivative) of f (x) at x0 is denoted f′ (x0) and defined by
if exist and then
if exist and then
Remark 3.1. This gS-derivative is well-defined because if f (x) is gS-differentiable at x0 ∈ [a, b] in the form of (i) and (ii) both then i.e. f′ (x0) ∈ R ⊂ E .
Theorem 3.1.The following definitions of derivative are equivalent
lateral H-derivatives (Definition 2.6)
generalized S-derivative (Definition 3.1)
Proof. Let f : (a, b) → E is lateral H-differentiable. Then according to Theorem 5 in [5] f1 (x, α) and f2 (x, α) are differentiable and if f (x) is (1)-differentiable then i.e. f (x) is gS-differentiable in the form of (i) or if f (x) is (2)-differentiable then i.e. f (x) is gS-differentiable in the form of (ii). Therefore (a) implies (b).
Let f : (a, b) → E is gS-differentiable in the form of (i) then f1 (x, α) , f2 (x, α) exist, and
Therefore,
Therefore from (4) we get
and from (5) we get
Now using (1)-(3) in (6) and (7) we get
Hence f (x) is (1)-differentiable. Similarly we can prove that if f (x) is gS-differentiable in the form of (ii) then f (x) is (2)-differentiable. Therefore (b) implies (a), which completes the proof.
Remark 3.2. From the above theorem we can say that the theorems and properties true for lateral H-derivative is also true for gS-derivative and those theorems and properties can also be proved by using the definition of gS-derivative.
Fuzzy differential transform method (FDTM)
Definition 4.1. The transformation F (k) of kth derivative of a function f (x) : (a, b) → E in one variable is as follows:
when f (x) is gS-differentiable in the form of (i) and
when f (x) is gS-differentiable in the form of (ii).
So, if f (x) be gS-differentiable in the form of (i) then f (x) can be presented as follows:
and if f (x) be gS-differentiable in the form of (ii) then f (x) can be presented as follows:
Theorem 4.1.Let us considerf (x) , u (x) andv (x) are fuzzy valued functions and their fuzzy differential transformations denoted byF (k) , U (k) andV (k) , respectively. Iff (x) , u (x) andv (x) are all gS-differentiable in the form (i) or all gS-differentiable in the form of (ii). Then
if f (x) = u (x) + v (x) , then
if f (x) = u (x) - v (x) , then
if f (x) = u (x) ⊖ v (x) , then
Proof. Using the Definition 4.1 the proof is obvious.
Theorem 4.2.Let us considerf (x) , u (x) andv (x) are fuzzy valued functions and their fuzzy differential transformations denoted byF (k) , U (k) and V (k) , respectively. Iff (x) , u (x) are (i)-differentiable andv (x) is (ii)-differentiable orf (x) , u (x) are (ii)-differentiable andv (x) is (i)-differentiable then
if f (x) = u (x) + v (x) , then
if f (x) = u (x) - v (x) , then
if f (x) = u (x) ⊖ v (x) , then
Proof. Using Definition 4.1 the proof is obvious.
Theorem 4.3.Let us consider the fuzzy-valued functionsg (x) ∈ Ewhereg (x) is gS-differentiable
in the form of (i) andthenk ≥ 1 whereF (k) andG (k) are the fuzzy differential transformations offandgrespectively.
Proof. From Theorem 3.2 of [7] this result is true for (1)-differentiable. Therefore using Theorem 3.1 we can say that this result is true for gS-differentiable in the form of (i).
Theorem 4.4.Let us consider the fuzzy-valued functionsg (x)∈ E where g (x) is gS-differentiable in the form of (ii) and then for 0 ≤ α ≤ 1 andk ≥ 1
where F (k) and G (k) are the fuzzy differential transformations of f and g respectively.
Proof. Using the definition of FDTM, we get for 0 ≤ α ≤ 1
Now changing the index we have
Now by using Definition 4.1 we have
Theorem 4.5.(see [7]) Let us consider the fuzzy-valued functionsg (x) ∈ Ewhereg (x) is (1)-differentiable and then k ≥ nwhereF (k) andG (k) are the fuzzy differential transformations offandgrespectively.
Theorem 4.6.Let us consider the fuzzy-valued functionsg (x) ∈ Ewhereg (x) is gS-differentiable in the form of (ii) and
then for 0 ≤ α ≤ 1 andk ≥ nif n is an even number
if n is an odd number
Proof. Using the definition of FDTM, we get for 0 ≤ α ≤ 1
and
Now if n is even, then after changing the index we have
Therefore, for 0 ≤ α ≤ 1 and k ≥ n
Now if n is even, then after changing the index we have
Therefore, for 0 ≤ α ≤ 1 and k ≥ n
Theorem 4.7.(see [7]) Suppose thatU (k) andG (k) are the differential transformation of the functionsu (x) (is a fuzzy valued function) andg (x) (is a positive real-valued function), respectively. Ifthen under (1)-differentiability offwe have for 0 ≤ α ≤ 1 andk ≥ 1
and under (2)-differentiability of f we have for 0 ≤ α ≤ 1 and k ≥ 1
Theorem 4.8.(see [7]) Suppose thatU (k) andG (k) are the differential transformation of the functionsu (x) (is a fuzzy valued function) andg (x)(is a positive real-valued function), respectively. Ifthen under (1)-differentiability offwe have for 0 ≤ α ≤ 1 andk ≥ 1
and under (2)-differentiability of f we have for 0 ≤ α ≤ 1 and k ≥ 1
Theorem 4.9.(see [7]) Suppose thatU (k) andG (k) are the differential transformation of the functionsu (x) (is a fuzzy valued function) andg (x) (is a positive real-valued function), respectively. Iff (x) = g (x) u (x), then under (1)-differentiability offwe have
Theorem 4.10.Let us consider the fuzzy-valued functionsg (x) ∈ Eand
If g (x) is gS-differentiable in the form of (i) then
If g (x) is gS-differentiable in the form of (ii) then if n is even, and if n is odd, and
Proof. The proof is obvious from Definition 4.1.
Applications and numerical results
In this section, we apply the present method on some test problems. The numerical results are calculated using Wolfram Mathematica 9.0 and the figures are drawn using MATLAB R2010a. One can see from the numerical results, by increasing approximating terms, the accuracy of the approximate solution increases.
In order to perform a superior error analysis of the obtained approximate solutions by our method, we use the following convergence indicator
The point wise absolute error:
where
FDT is considered up to k = K .
Problem 5.1. Let us consider the following nonlinear fuzzy Volterra integro-differential equation
where
with initial conditions
Now using the properties of FDTM we have the result for 0 ≤ α ≤ 1, k = 0
and for k > 0
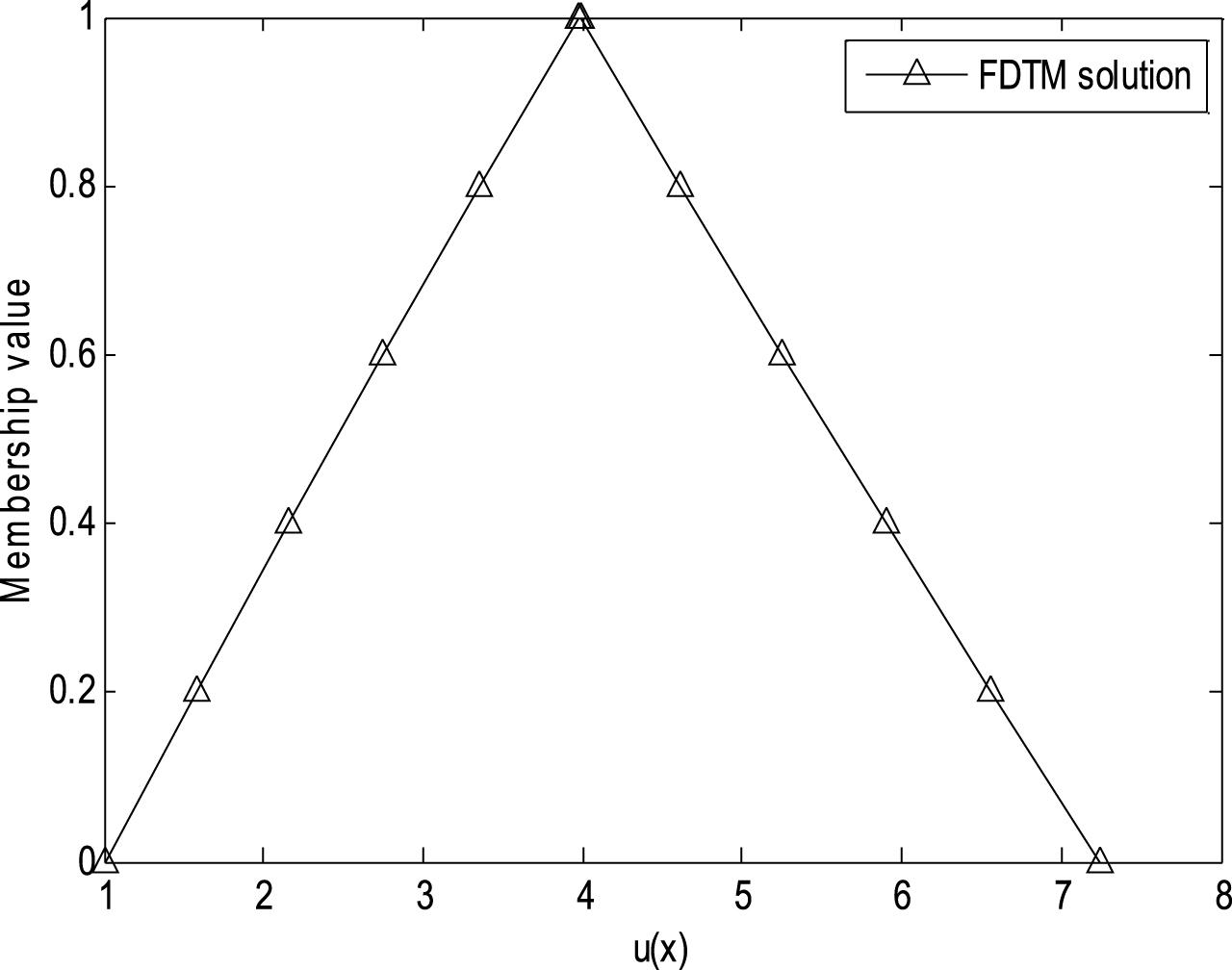
Then after considering FDT up to k = 7 we get an approximate Taylor series solution of order 7 as follows
The graph of the membership function of the solution of Problem 5.1 is given in Fig. 1. From Fig. 1 we can see that as the initial conditions of the Problem 5.1 are given by triangular fuzzy number, the solution of the Problem 5.1 also represents a triangular fuzzy number.
FDTM solution for the membership function at x = 1 for Problem 5.1.
Problem 5.2. Let us considered here a linear fuzzy Volterra integro-differential equation as
subject to the initial conditions
The exact solution, given by classical solution method, is u1 = αex and u2 = (2 - α) ex.
By the same application of the FDTM which is used for Problem 5.1, the approximating solutions can be obtained for different values of K.
Now after considering FDT up to k = 7 we get an approximate Taylor series solution of order 7 as follows
Hence
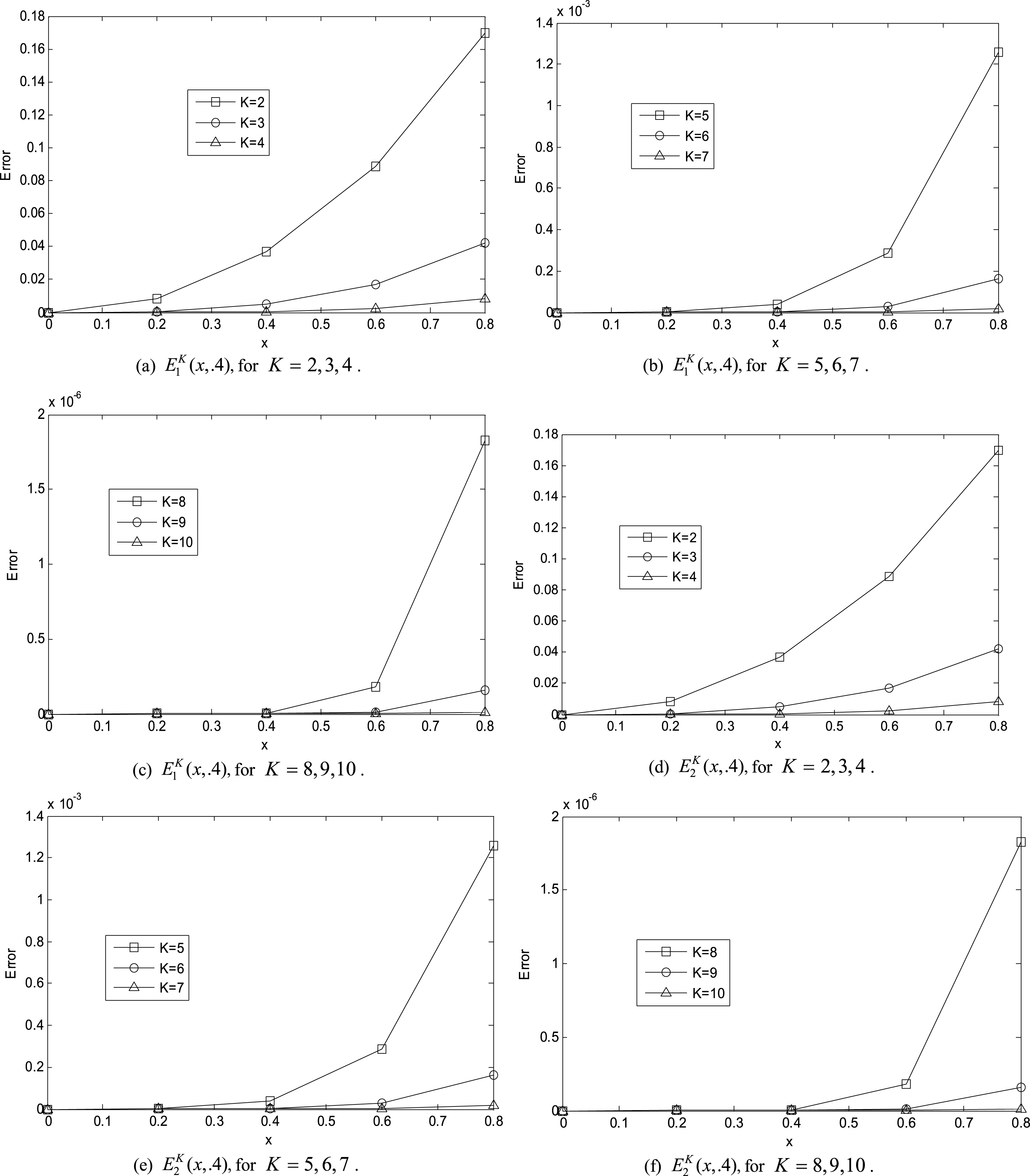
The absolute point wise errors of obtained values by our method for different number of approximating terms are shown in Table 1 and Table 2. Figure 2 shows the physical behavior of the absolute error function. As one can see from Fig. 2, by increasing the value of K, the absolute error functions approach to zero very rapidly. Besides, Fig. 2 also shows that our FDTM gives reasonable results for small K too.
The behavior of the absolute values of error functions versus x, and different values of the approximating terms, K for Problem 5.2.
Absolute point wise errors of obtain values by our method for different values of K for Problem 5.2
X
0.0
0.00E-00
0.00E-00
0.00E-00
0.00E-00
0.2
2.78E-05
3.66E-08
2.78E-05
2.60E-11
0.4
4.63E-04
2.41E-06
4.63E-04
6.80E-09
0.6
2.45E-03
2.83E-05
2.45E-03
1.78E-07
0.8
8.08E-03
1.64E-04
8.08E-03
1.83E-06
1.0
2.06E-02
6.46E-04
2.06E-02
1.11E-05
Absolute point wise errors of obtain values by our method for different values of K for Problem 5.2
x
0.0
0.00E-00
0.00E-00
0.00E-00
0.00E-00
0.2
5.55E-05
5.19E-11
8.33E-05
7.79E-11
0.4
7.93E-04
1.36E-09
1.39E-03
2.04E-08
0.6
4.90E-03
3.57E-07
7.34E-03
5.35E-07
0.8
1.62E-02
3.65E-06
2.42E-02
5.48E-06
1.0
4.13E-02
2.23E-05
6.19E-02
3.34E-05
Problem 5.3. Following Ref. [27], let us consider the fuzzy Volterra integro-differential equation as
subject to the initial conditions
The exact solution is
By the same application of the FDTM which is used for Problem 5.1, the approximating solutions can be obtained for different values of K.
Now after considering FDT up to k = 3 we get the exact solution
Table 3 and Table 4 show the comparison of absolute point wise error, which are obtain by our method for K = 3, Variational Iteration Method (VIM) [27] for number of iterations, n + 1 =3 and Homotopy Perturbation Method (HPM) [27] for numberofiterations = 3 . One can see from Tables 3 and 4 that although the VIM [27] gives more accurate result than HPM [27] but our method, FDTM, is more accurate and quicker than these methods.
Comparison of absolute errors between our method (DTM), VIM [27] and HPM [27] for Problem 5.3
In this work, the concept of gS-derivative has been introduced which is equivalent to the lateral H-derivative but compare to the definition of the lateral H-derivative, gS-derivative is more easy to understand and use. Therefore, gS-derivative gives an alternative way to define fuzzy derivative and to prove the properties of fuzzy derivative. Several properties of FDT are studied and FDTM for the solution of fuzzy Volterra integro-differential equation is nicely presented. We have explained the practicality and efficiency of this method by examining several numerical examples and the obtained results shows valuable performance over existing methods. In Problems 5.2 and 5.3 we have seen that if the exact solution of the fuzzy Volterra integro-differential equation exists then the solution given by our method converges to the exact solution very rapidly. Comparison with other numerical algorithms shows that our method, FDTM, gives better results compare to the VIM [27] and HPM [27]. For the VIM [27] and HPM [27] it is almost impossible to identify the exact solution, if it exists, by observing the approximate solution. Since, in our FDTM, the approximate solution is given in the form of Taylor series, if the exact solution exist then it is very easy to identify the exact solution by observing the approximate solution in the form of Taylor series of known function as we have seen in Problem 5.2.
Footnotes
Acknowledgments
The research work of Suvankar Biswas is financed by Department of Science and Technology, (No. DST/INSPIRE/Fellowship/2014/148) Govt. of India.
References
1.
MizukoshiM.T., BarrosL.C., Chalco-CanoY., Roman-FloresH. and BassaneziR.C., Fuzzy differential equations and extension principle, Information Sciences177 (2007), 3627–3635.
2.
PuriM. and RalescuD., Differentials of fuzzy functions, J Math Anal Appl91 (1983), 552–558.
3.
SeikkalaS., On the fuzzy initial value problem, Fuzzy and Systems24 (1987), 319–330.
4.
BabolianE., SadeghiGogharyH. and AbbasbandyS., Numerical solution of linear Fredholm fuzzy integral equations of the second kind by Adomian method, Applied Mathematics and Computation161 (2005), 733–744.
5.
Chalco-CanoY. and Romn-FloresH., On new solutions of fuzzy differential equations, Chaos, Solitons and Fractals38 (2008), 112–119.
6.
BedeB., Mathematics of Fuzzy Sets and Fuzzy Logic, Springer, 2013, pp. 157–158.
7.
SalahshourS. and AllahviranlooT., Application of fuzzy differential transform method for solving fuzzy Volterra integral equations, Applied Mathematical Modelling37 (2013), 1016–1027.
8.
ZadehL., Toward a generalized theory of uncertainty (GTU) – an outline, Information Sciences175 (2005), 1–40.
9.
CasasnovasJ. and RossellF., Averaging fuzzy biopolymers, Fuzzy Sets and Syst152 (2005), 139–158.
10.
BarrosL.C., BassaneziR.C. and TonelliP.A., Fuzzy modelling in population dynamics, Ecol Model128 (2000), 27–33.
11.
El NaschieM.S., From experimental quantum optics to quantum gravity via a fuzzy Khler Manifold, Chaos, Solitons and Fractals25 (2005), 969–977.
12.
BarrosL.C. and PedroF.S., Fuzzy differential equations with interactive derivative, Fuzzy Sets and Systems309 (2017), 64–80.
13.
SubrahmanyamP.V. and SudarsanamS.K., A note on fuzzy Volterra integral equations, Fuzzy Sets and Systems81 (1996), 237–240.
14.
BedeB. and GalS.G., Generalizations of differentiability of fuzzy-number-valued functions with applications to fuzzy differential equations, Fuzzy Sets and Systems151 (2005), 581–599.
15.
ZhouJ.K., Differential Transformation and its application for electrical circuits, Huazhong University Press, Wuhan, China, 1986.
16.
BedeB. and StefaniniL., Generalized Hukuhara differentiability of interval-valued functions and interval differential equations, Nonlinear Analysis71 (2009), 1311–1328.
17.
BedeB. and StefaniniL., Generalized differentiability of fuzzy-valued functions, Fuzzy Sets and Systems230 (2013), 119–141.
18.
BedeB. and GalS.G., Quadrature rules for integrals of fuzzy-number-valued functions, Fuzzy Sets Syst145 (2004), 359–380.
19.
MoslehM. and OtadiM., Existence of solution of nonlinear fuzzy Fredholm integro-differential equations, Fuzzy Information and Engineering8 (2016), 17–30.
20.
ZeinaliM., ShahmoradS. and MirniaK., Fuzzy intrego-differential equations: Discrete solution and error estimation, Iranian Journal of Fuzzy Systems10 (2013), 107–122.
21.
MirzaeeF. and HoseiniS.F., Solving systems of linear Fredholm integro-differential equations with Fibonacci polynomials, Ain Shams Engineering Journal5 (2014), 271–283.
22.
AlikhaniR., BahramiF. and JabbariA., Existence of global solutions to nonlinear fuzzy Volterra integro-differential equations, Nonlin Anal75 (2012), 1810–1821.
23.
AttariH. and YazdaniA., A computational method for fuzzy Volterra Fredholm integral equations, Fuzzy Inf Eng2 (2011), 147–156.
24.
Khorasani KiasariS.M., KhezerlooM., Dogani AghcheghlooM.H., Numerical solution of Linear Fredholm fuzzy integral equations by modified homotopy perturbation method, Aust J Basic Appl Sci4 (2010), 6416–6423.
25.
MolabahramiA., ShidfarA. and GhyasiA., Ananalytical method for solving linear Fredholm fuzzy integral equations of the second kind, Comput Math Appl61 (2011), 2754–2761.
26.
AbbasbandyS., BabolianE. and AlaviM., Numerical method for solving linear Fredholm fuzzy Integral equations of the second kind, Chaos Solitons Fractals31(1) (2007), 138–146.
27.
MatinfarM., GhanbariM. and NuraeiR., Numerical solution of linear fuzzy Volterra integro-differential equations by variational iteration method, Journal of Intelligent & Fuzzy Systems24 (2013), 575–586.
28.
AllahviranlooT., AbbasbandyS., SedaghatfarO. and DarabiP., A new method for solving fuzzy integro-differential equation under generalized differentiability, Neural Computing and Applications21 (2012), 191–196.
29.
BehzadiS.S., AllahviranlooT. and AbbasbandyS., Fuzzy collocation methods for second-order fuzzy Abel-Volterra integro-differential equations, Iranian Journal of Fuzzy Systems11(2) (2014), 71–88.
30.
AllahviranlooT., AmirteimooriA., KhezerlooM. and KhezerlooS., A new method for solving fuzzy Voltra integro-differential equations, Journal of Australian Journal of Basic and Applied Sciences5(4) (2011), 154–164.
31.
BehzadiSh.S., AllahviranlooT. and AbbasbandyS., Solving fuzzy second-order nonlinear Volterra–Fredholm integro-differential equations by using Picard method, Journal of Neural Computing & Applications21(1) (2012), 337–346.
32.
DiamondP., Stability and periodicity in fuzzy differential equations, IEEE Transactions on Fuzzy Systems8 (2000), 583–590.
33.
Chalco-CanoY. and Roman-FloresH., Comparation between some approaches to solve fuzzy differential equations, Fuzzy Sets and Systems160 (2009), 1517–1527.