
Abstract
DC-DC converters are widely used in many consumer electronic devices such as computers, medical equipment, battery chargers, cellular phones and many Industrial drives. These electronic devices require different voltage levels which is supplied from battery or some external supply. In multiple battery mission voltage decays as its stored energy is drained and requires large saving space. The switched DC-DC converters overcome these drawbacks and also regulate the output voltage for different power levels efficiently. This paper elaborates the structure of Luo converter with optimized PI controller. Positive Output Elementary Luo Converter (POELC) is designed for boost operation by choosing the appropriate duty cycle. The PI controller parameters are optimized using Cuckoo and Crow search algorithms. The proposed control methods are investigated for the transient and steady state region. The sensitivity of these controllers to supply load and line disturbances are also studied along with the servo response are presented. The controller incorporates a Luo converter is evaluated in terms of Integral Time Square Error (ITSE) and Integral Time Absolute Error. Dynamic modelling of the power converter is derived by using state space averaging method. The simulation model of the Luo converter with its control circuit is implemented in MATLAB/SIMULINK. Experimental result shows that Cuckoo PI controller has significantly performance improvement in comparison with both the conventional and Crow PI controller.
Keywords
Introduction
The Power conversion technique is widely used in industrial applications, electronic systems, medical equipment etc. An electronic device installed with multiple numbers of batteries requires large storage space and also charge of the battery drains very quickly. This drawback is rectified by using power conversion technique [1, 2].
Luo developed a high power positive output voltage with high efficiency with fewer ripple. In addition with conventional converter filter components are connected to reduce radio frequency interference. Pulse width modulation technique describes variation of duty cycle for desired responses. The static and dynamic characteristics of the power converter become non-linear due to the switching nature and time variations [3].
PI controller is more feasible to control the switching of the system. The difference between the desired and actual output value gives the error signal. Controller generates appropriate duty cycle to optimize the stability of the system [4].
Most of the case conventional controller shows poor performance in nonlinear systems. It concentrates only on local optimum solution. If the objective function has many decision variables then it desired for global optimal solution. The perspectives of artificial intelligence and operations research are combined together for the developments for global optimum solution [5].
Many complex problems in engineering are solved by various effective computer algorithms like genetic algorithms [6], simulated annealing [7], Particle Swam Optimization [8, 15] and the influence of biological analogies [9], Harmony Search Optimization [10], Cuckoo Search Optimization [11], Satin bowerbird optimization algorithm [12] are developed for optimum results. Algorithms based on the natural behavior of some cuckoo bird species combination with Lévy flights [13] and the intelligence of crow was developed for global optimization [14]. The Satin bowerbird optimization algorithm is successfully experienced for least congestion cost in generation rearranging method [16].
Some species among cuckoo which are brood parasites, which means those species lay eggs in a nest of other species and most of them raise species of their own. Crows birds are found around the world in different habitats. These birds are known for their problem-solving skills and communication skills. They won’t forget the face. Their behavior shows a high level of intelligence but slightly below that of humans. Crows have self-awareness in mirror tests. These Metaheuristic algorithms are mainly designed for many complex engineering design problems for global optimization [17, 18].
Regulatory and servo response of the converter are controlled by Cuckoo and Crow search Optimization is analyzed in detail. The Disturbance rejection in both line and load side is the main criteria for designing the controller parameter of power converter. From this study we conclude that, the cuckoo search optimization shows best performance (less value of ITSE, ITAE) among all other optimized controller.
The remaining sections are well-arranged as follows: Section 2 explains the design and mathematical model of the Luo converter. Conventional PI controller explains in Section 3. Cuckoo and Crow Search Optimization of Luo Converter present in Section 4 and 5 respectively. Section 6 includes the Simulation results. The corresponding hardware results are provided in Section 7. Conclusion is conveyed in Section 8.
Converter design
Figure 1 shows the positive output elementary Luo converter suggested for boost operation. In this circuit, passive components L1, L2 inductors and C1, C2 capacitors are connected with switch S, Freewheeling diode D and the load resistance RL. The converter operates in two modes.
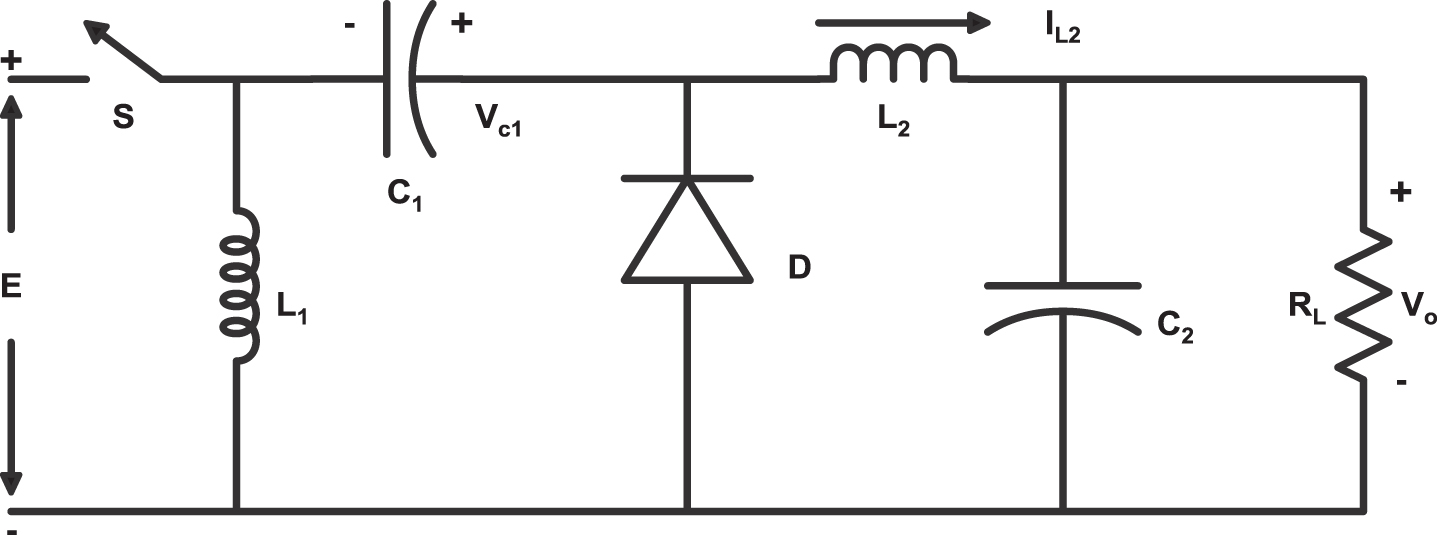
Circuit Diagram for Luo Converter.
Mode 1: When the converter is switched on, current flowing through the inductor L1 is increasing for supply voltage Vin. Simultaneously the inductor L2 gains the energy source from capacitor C1. The load resistance attains voltage from capacitor C2. The converter circuit in mode 1 operation is shown in Fig. 2.
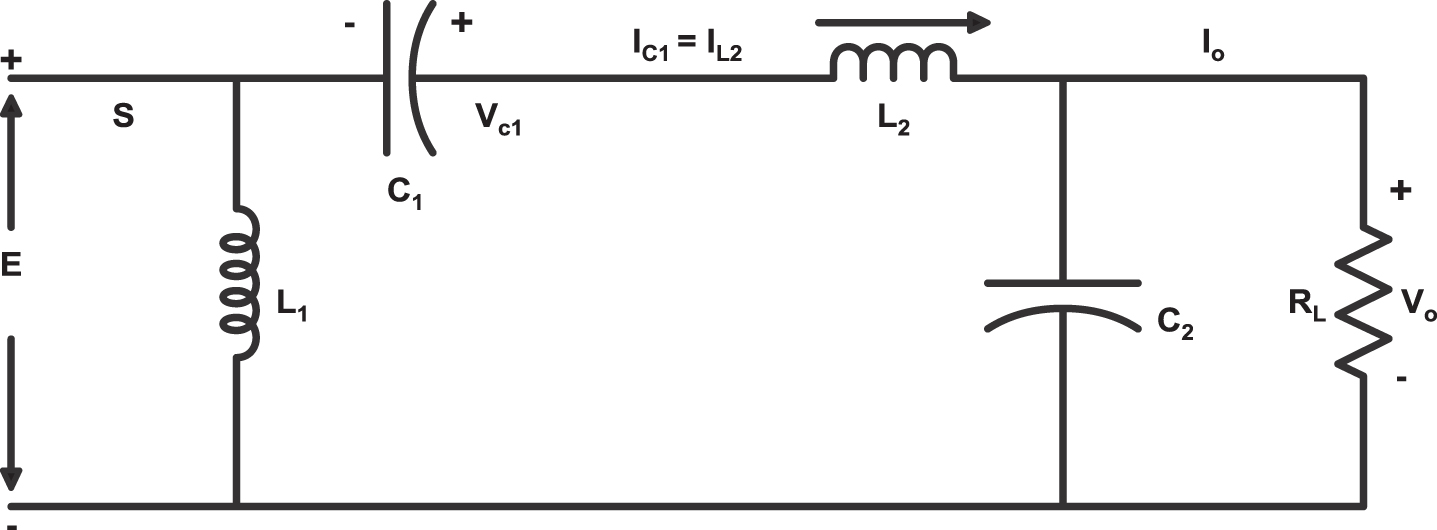
Mode 1 operation of Luo Converter.
Mode 2: When the converter is switched off, the source current turns zero. The capacitor C1 is charged by the current IL1 which flows through freewheeling diode D. For continuous conduction the current IL2 flows to the load circuit and the freewheeling diode D. Fig. 3 shows the converter operation in mode 2.
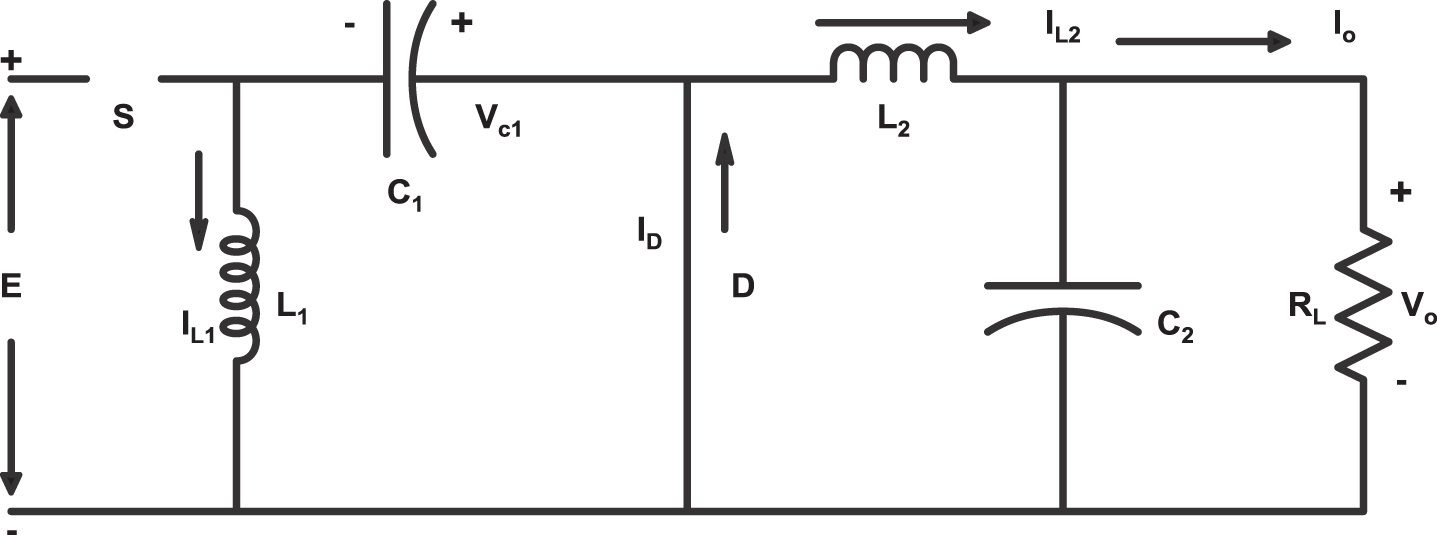
Mode 2 operation of Luo Converter.
Mathematical model of the converter is derived by state space average method in which state equation is derived for power switch conduction period and the diode conduction period. The averaged system matrix can also be formulated for the converter by introducing a duty ratio ∂ as given by,
The switch S is ON condition
The switch S is OFF condition
All state variables are subscribed as
The transfer function is given by,
The positive output Luo converter operating in continuous conduction mode has been designed in this work. The converter parameters are chosen for duty cycle of 0.8 as follows
The ripple current in inductor L1
The ripple current in inductor L2
The ripple voltage in capacitor C1
The ripple voltage in capacitor C2
The corresponding transfer function is given as
By using Pade-Routh approximation system transfer function (18) is approximated as follows
The PI controller is designed for Luo Converter shown in Fig. 4. The difference between the reference variable and the process variable is given as input for the controller and the controller regulates the converters for the desired performance.
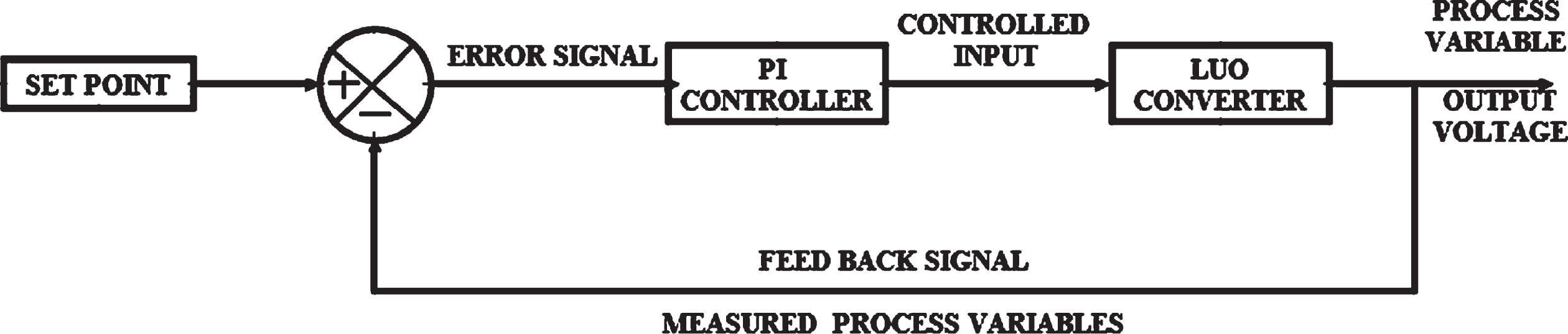
Block Diagram of Luo converter using PI controller.
The response for open loop transfer function of the plant for step input is presented in Fig. 5. Draw the tangent to the ‘S’ shaped Curve at its inflection point and noting its intersections with the time axis and the steady state value. Delay time L = 0.005 s and the time constant a = 0.5 is taken from the response.
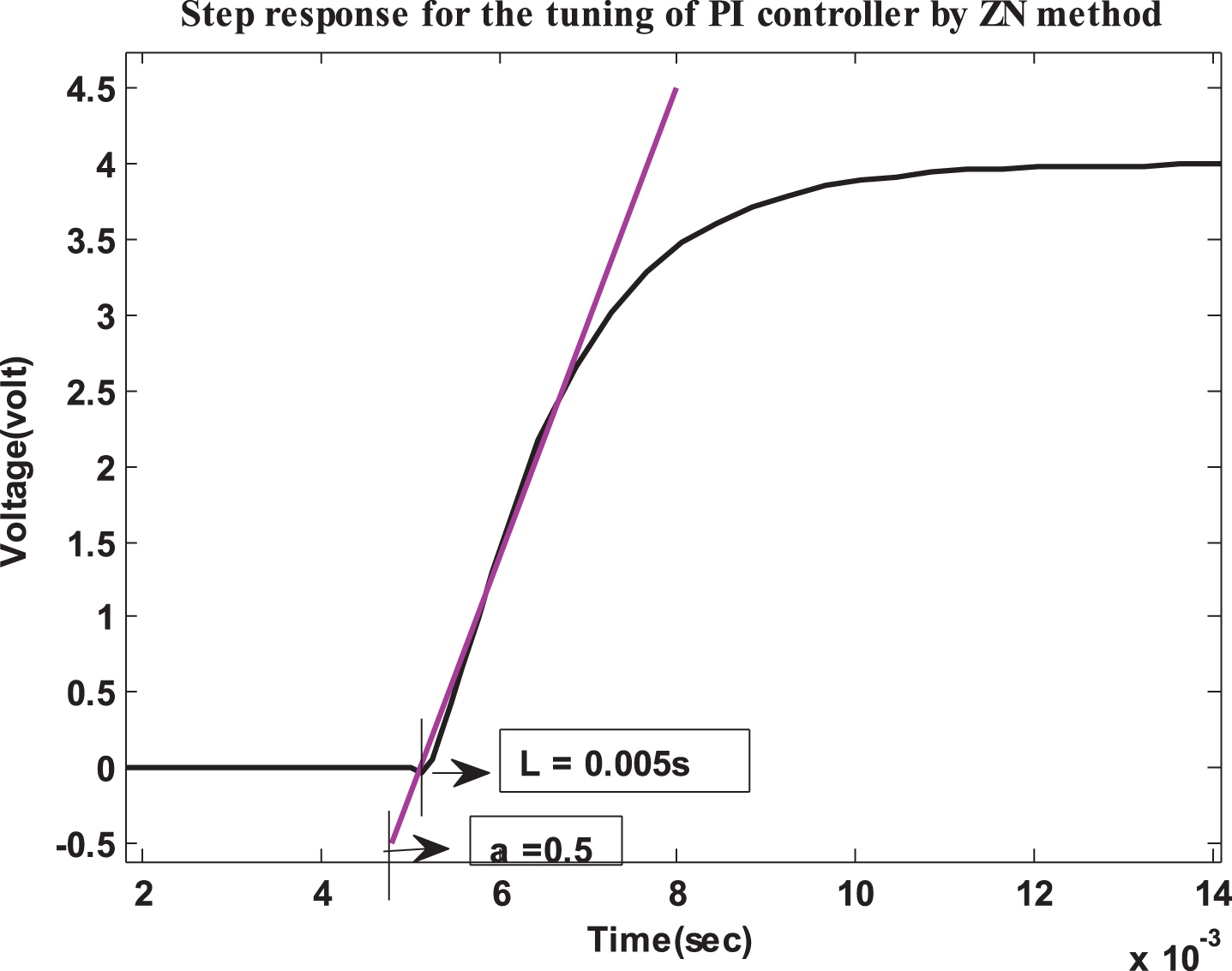
Step response of the converter (‘S’ shaped Curve).
The optimal setting values of PI Controller (K p and T i ) for Luo Converter are attained by the ZN method for desired performance.
The Cuckoo Search (CS) Optimization algorithm is principally based on the natural cheating character of some cuckoo birds in combination with the Lévy flight behaviours of some birds and fruit flies. Cuckoos are renowned for their melodies sound they create and of their cunning reproduction method by lay eggs in the nest of other innocent birds, and destroy their eggs so as to increase the hatching probability of their own eggs. After hatching the host birds feed their chicks. In this algorithm cuckoo egg denotes a potential solution to the design problem which has a fitness value.
A block diagram of Luo converter using Cuckoo Search Optimization is shown in Fig. 6. The PI controller parameters were optimized by Cuckoo Search algorithm.
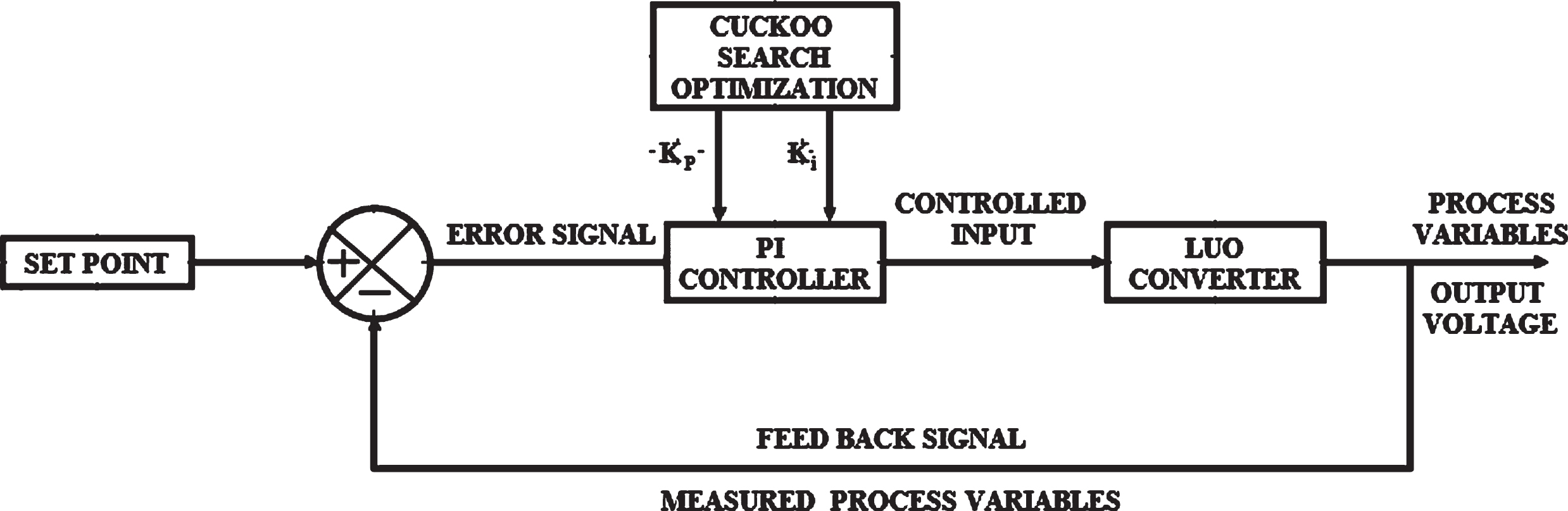
Block Diagram of Luo converter using Cuckoo Search Optimization.
Let’s assume a nest with an egg which denotes a solution and a cuckoo egg denotes a new solution. Cuckoo egg replaces poor solutions that are in the nests. In complex scenarios this algorithm can play a vital role in which a nest having multiple eggs will be representing a set of solutions.
x (t + 1) is a new solution for cuckoo ‘i’ is generated using a Lévy flight according to the following equation:
Where, α > 0 represents step scaling size of the problem.
Equation (24) states that random walk is a Markov chain whose next location depends on two elements: a current location and a transition probability [19, 20].
From a Lévy distribution the random step length is drawn which has an infinite variance with an infinite mean:
Where, λɛ [0, 3]. Levy flight is performed when generating new solutions for a cuckoo.
The pseudo code for Cuckoo Search Optimization is given as,
Start
Objective function f(x), x = (x1,x2 ... xu)T
Generating initial population of n host nests
xi (i = 1, 2, ... n)
while (t < MaxGenerations) and (! termin.condit.)
move a cuckoo randomly via Lévy flights
evaluate its fitness Fi
randomly choose nest among n available nests
(for example j)randomly
if(Fi > Fj)
replace j by the new solution;
end
a fraction (pa) of worse nests are abandoned and
new nests are being built;
Keep the best solutions
or nests with quality solutions;
Rank the solutions and find the current best
end while
Post process and visualize results
end.
Crows are believed to be the cleverest birds. Their intelligence can be spotted in all their activities such as searching food and safe guarding from other species. They keep on watching other birds and on their absence steal their food and brilliantly safeguard it from the suspicious eyes of the victim [21, 22].
A block diagram of Crow Search Optimization using LUO converter is shown in Fig. 7. The PI controller parameters were optimized by Crow Search algorithm. In this algorithm flock size, maximum number of iterations, flight length and awareness probability (AP) are the variable parameters has to be defined [14]. The principles of CSA are listed as follows: Crows live in the form of flock. Crows remember the place of other birds hiding places. Crows track the host birds to do thievery. Crows safeguard their caches from being pilfered by a probability.
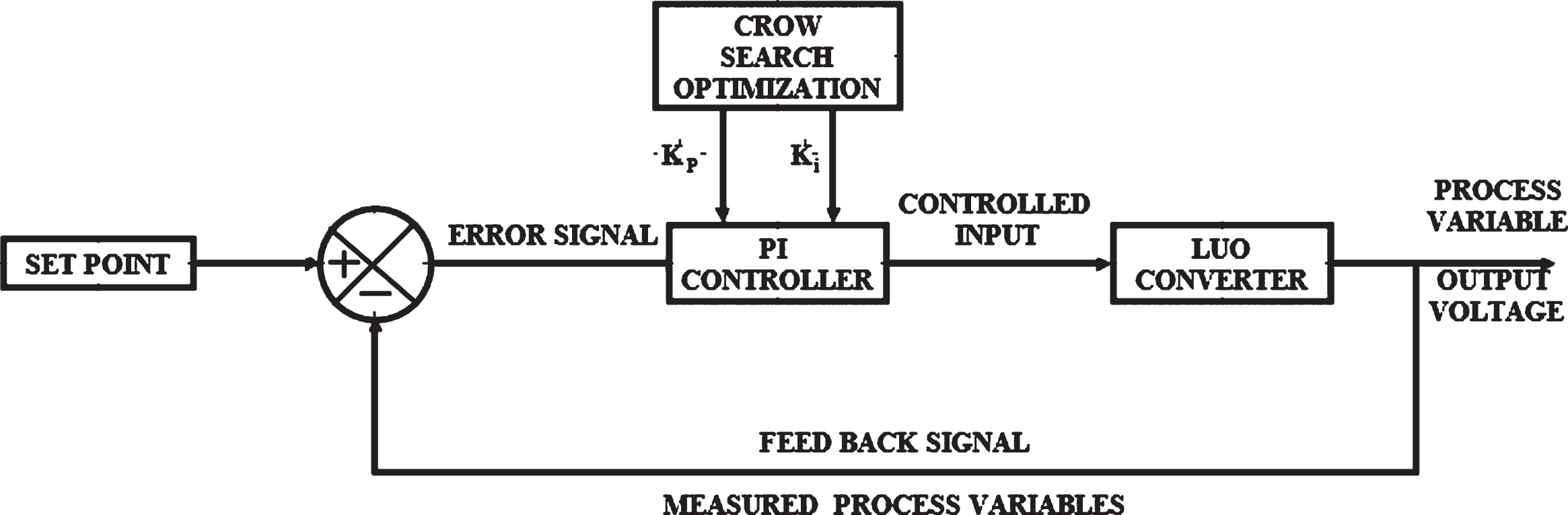
Block Diagram of Luo converter using Crow Search Optimization.
In Crow search optimization, for the small value of awareness probability (AP), algorithms have a tendency to conduct the look at on a local region where a current good solution is set up in this region so as to increase the intensification.
The Pseudo code for Crow Search optimization is given as,
evaluate the position of the crows
initialize the memory of each crow
while iter < iter max
for i = 1: N (all N crows of the flock)
Randomly choose one of the crows to follow (for example j)
Define an awareness probability
if
else
xi,iter+1= a random position of search space
end if
end for
check the feasibility of new positions
evaluate the new position of the crows
update the memory of crows
end while.
The control methods used for the proposed systems are PI, Cuckoo PI and Crow PI optimized converter for output voltage Vo = 48 V for the proposal values of Vin = 12 V, L1 = L2 = 1 mH, C1 = 16μF, C2 = 3000μF,Switching frequency Fs = 50 KHz, RL = 10–20Ω.
Figure 8 shows the performance of the converter where the load is increased and decreased by 20% at 3.5 seconds and 7 seconds respectively. Converter optimized using cuckoo search optimization senses the disturbances and settle down very quickly shows better dynamic and steady state performances. Crow PI controller shows minimum oscillation compare with the conventional controller.
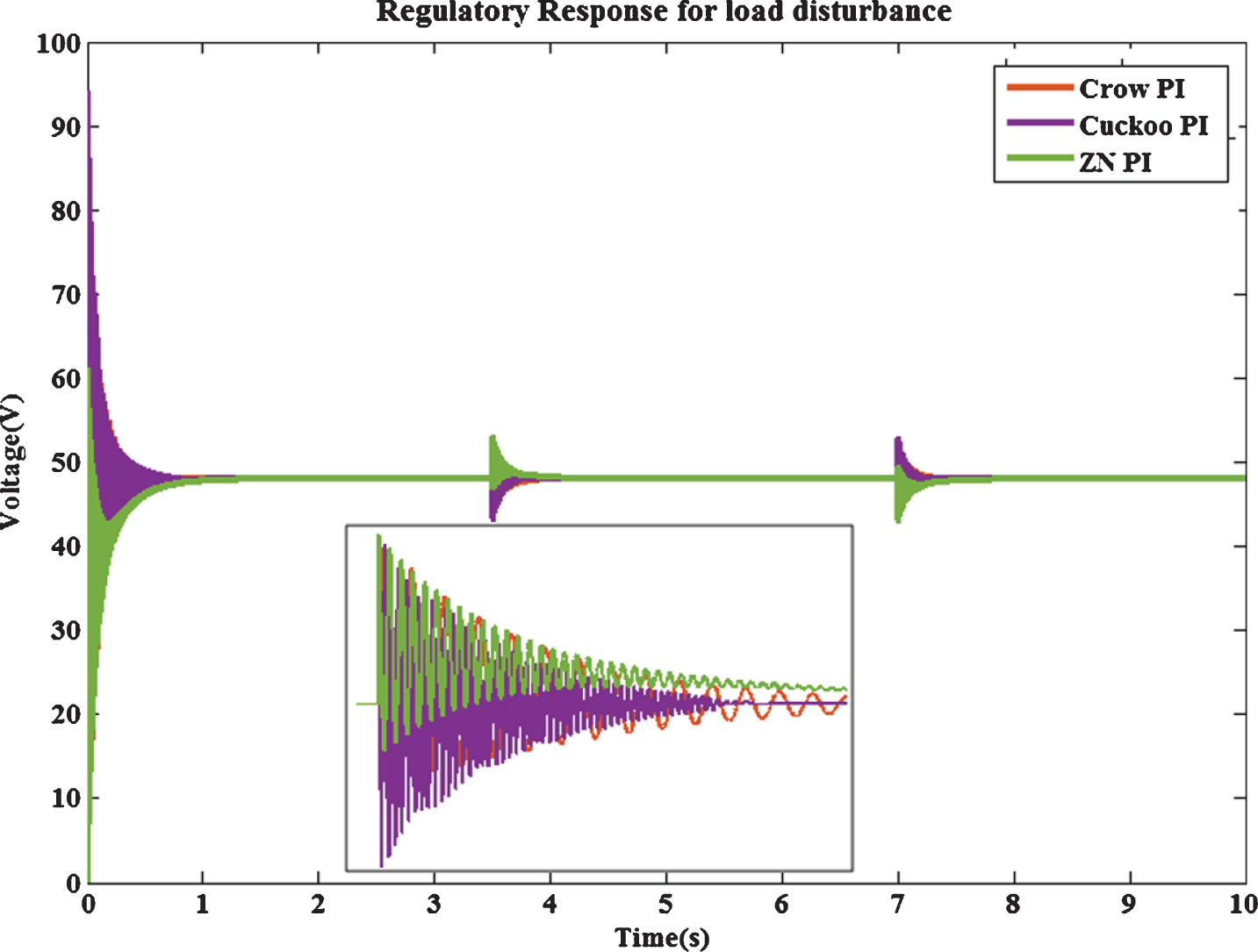
Regulatory response for load disturbance.
Figure 9 shows the performance of the converter when the line voltage is increased and decreased by 20% at 3.5 seconds and 7 seconds respectively by using various optimized parameter. Cuckoo PI controller rejects the disturbances and settles down very quickly.
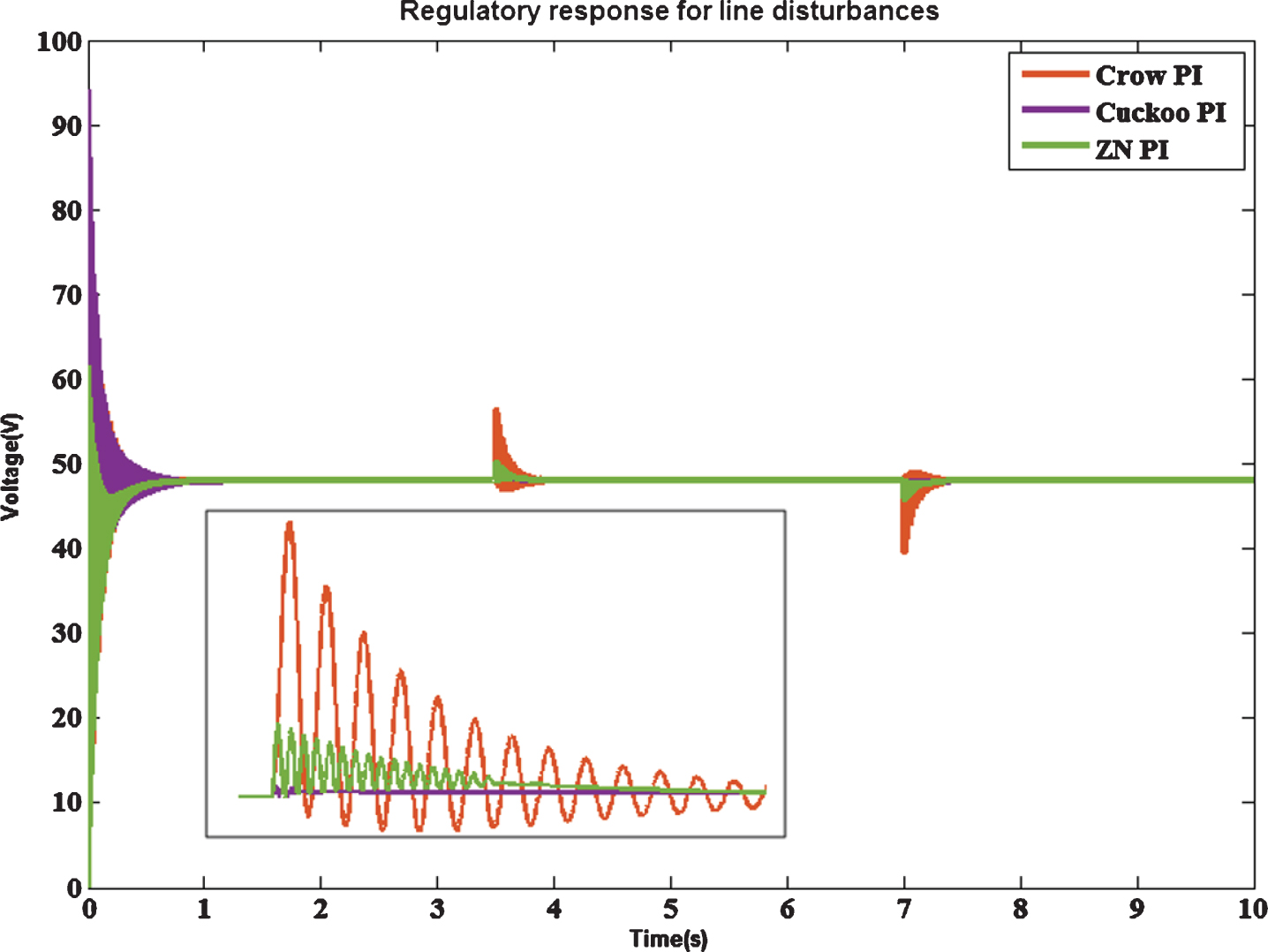
Regulatory response for line disturbance.
Figure 10 shows the set point tracking of converter using the controller by setting the output voltage changes from 48 V to 53 V at 3.5 sec, 53 V to 48 V at 7 sec The Cuckoo PI controller achieves the set point very smoothly whereas conventional PI controller gives uneven oscillation for a long time and settles only after 0.5 sec. Crow PI introduces little oscillation but calm down very quickly.
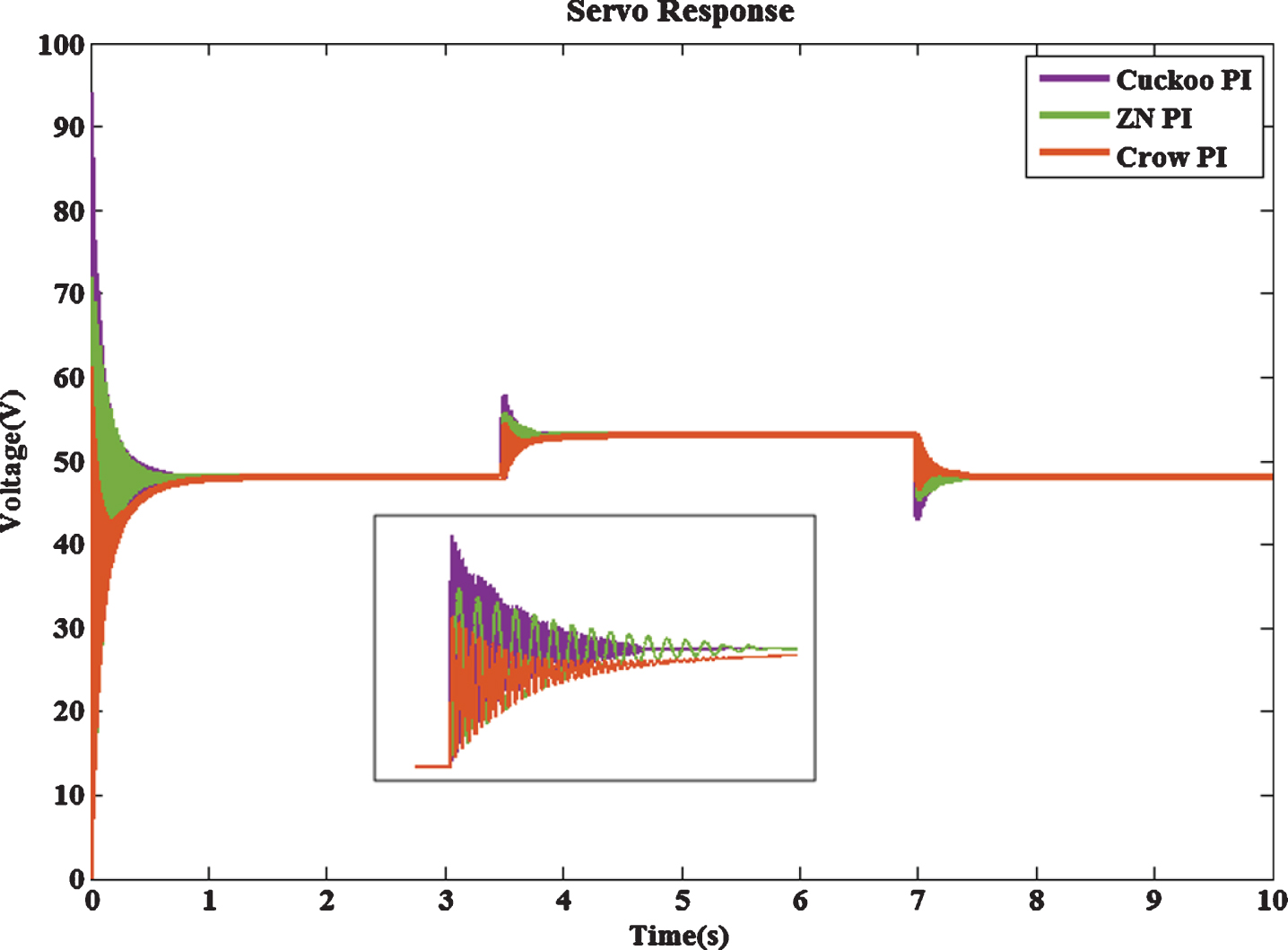
Servo response for Luo converter.
Kp and Ki values of PI controller parameters are found by using Ziegler Nichols, Cuckoo search and Crow search optimization methods illustrates in Table 1.
Controller parameters for PI controllers
The convergence characteristics of the Cuckoo PI and Crow PI for the system are analyzed by means of plotting the fitness function with respect to the number of generations as shown in Figs. 11 and 12 respectively. The optimum Cuckoo PI values are accomplished from 100 trials and the better convergence rate is witnessed are 28.38 and 41.6. In Crow PI values are attained from 500 trials which have convergence rate is observed and the PI parameters are 0.79 and 16.4 are tabulated in Table 1.
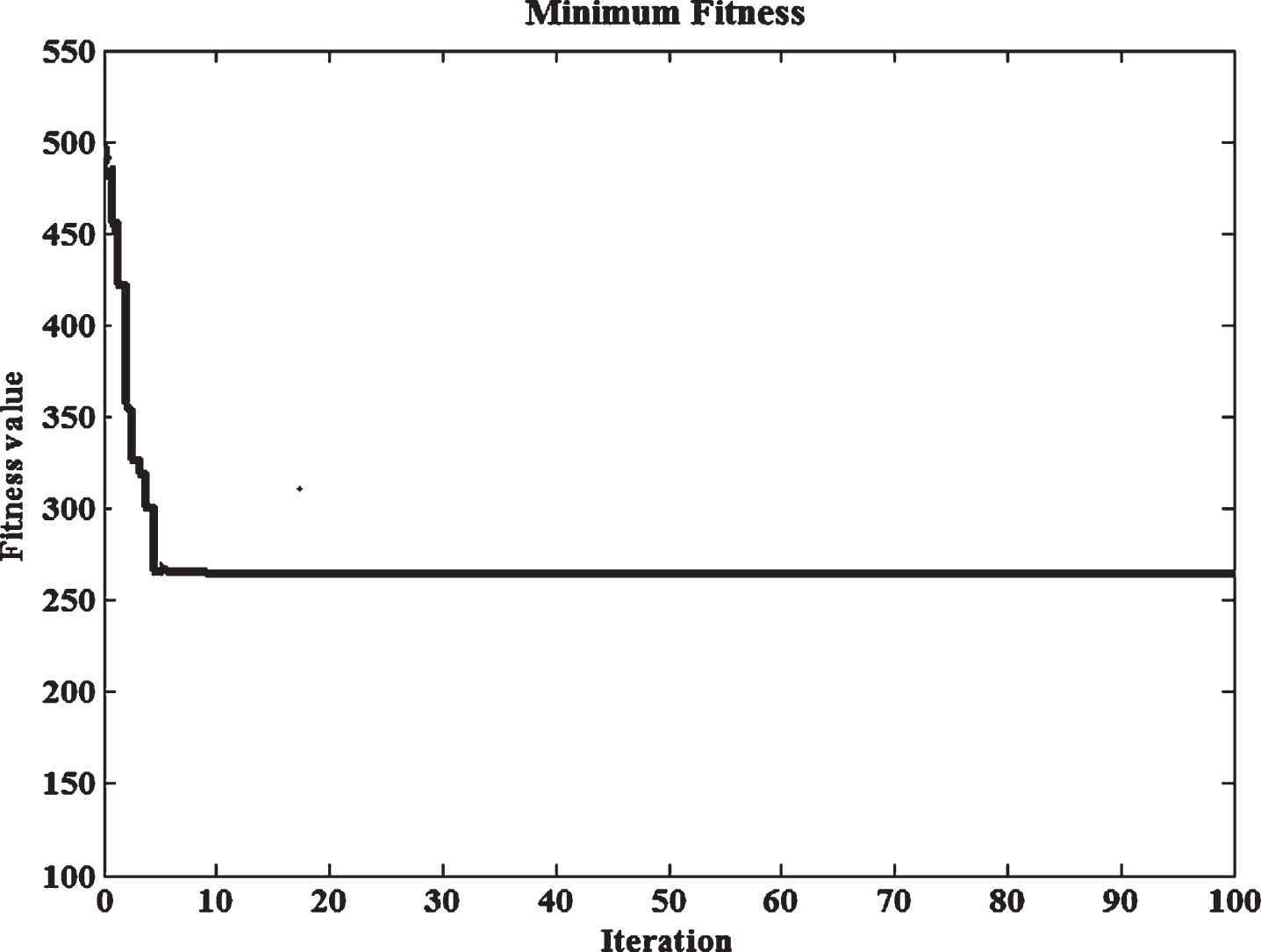
Convergence rate for finding best solution for Cuckoo Search Optimization.
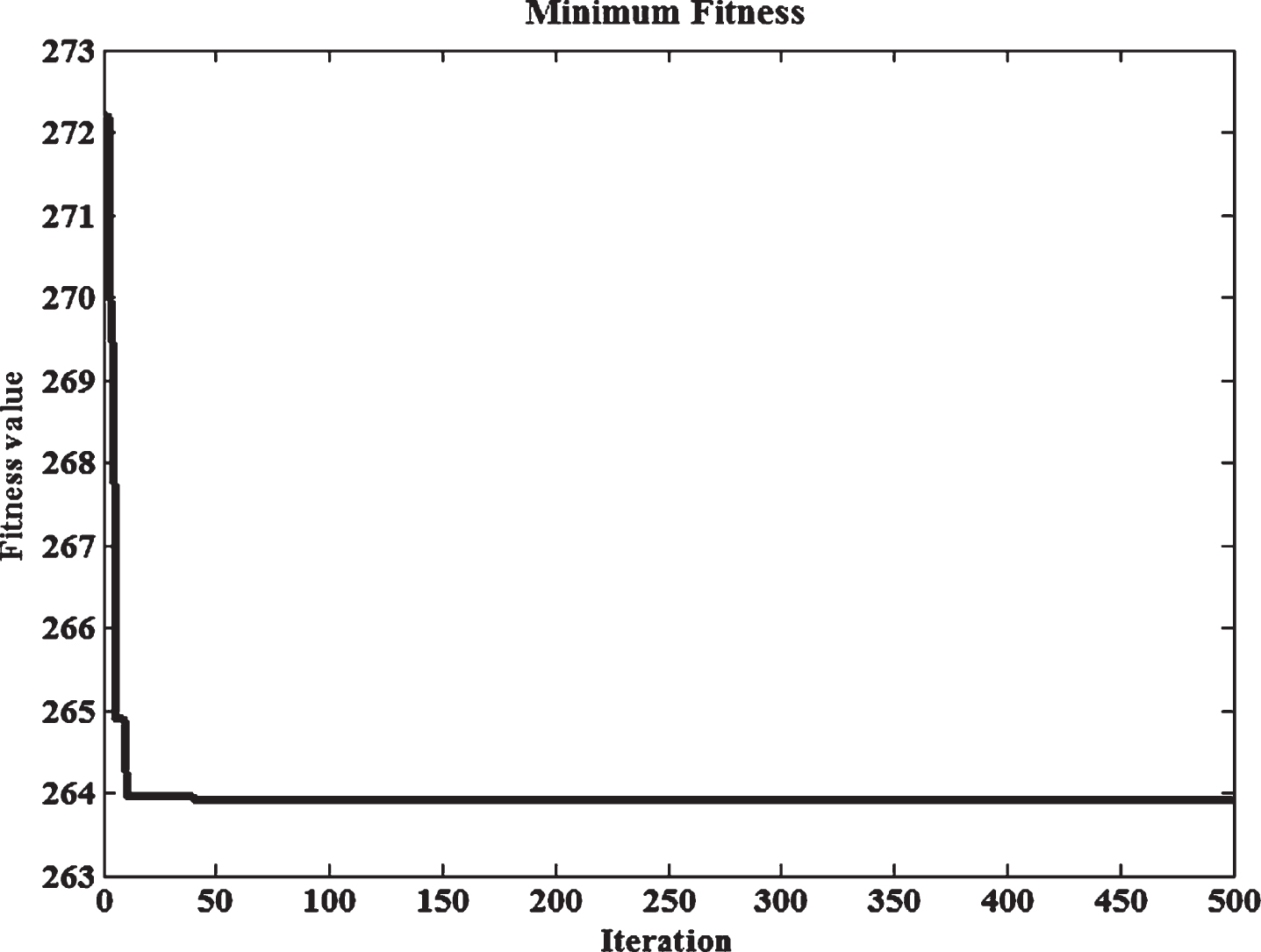
Convergence rate for finding best solution for Crow Search Optimization.
From Table 2 shows Performance Indices ITAE and ITSE values of power converters using various techniques. It is inferred that Cuckoo PI controller out performs the Crow PI controller and Ziegler-Nichols PI controller.
Performance Indices for controlled power converter
The hardware implementation of Luo converter with closed loop using microcontroller is shown in Fig. 13.
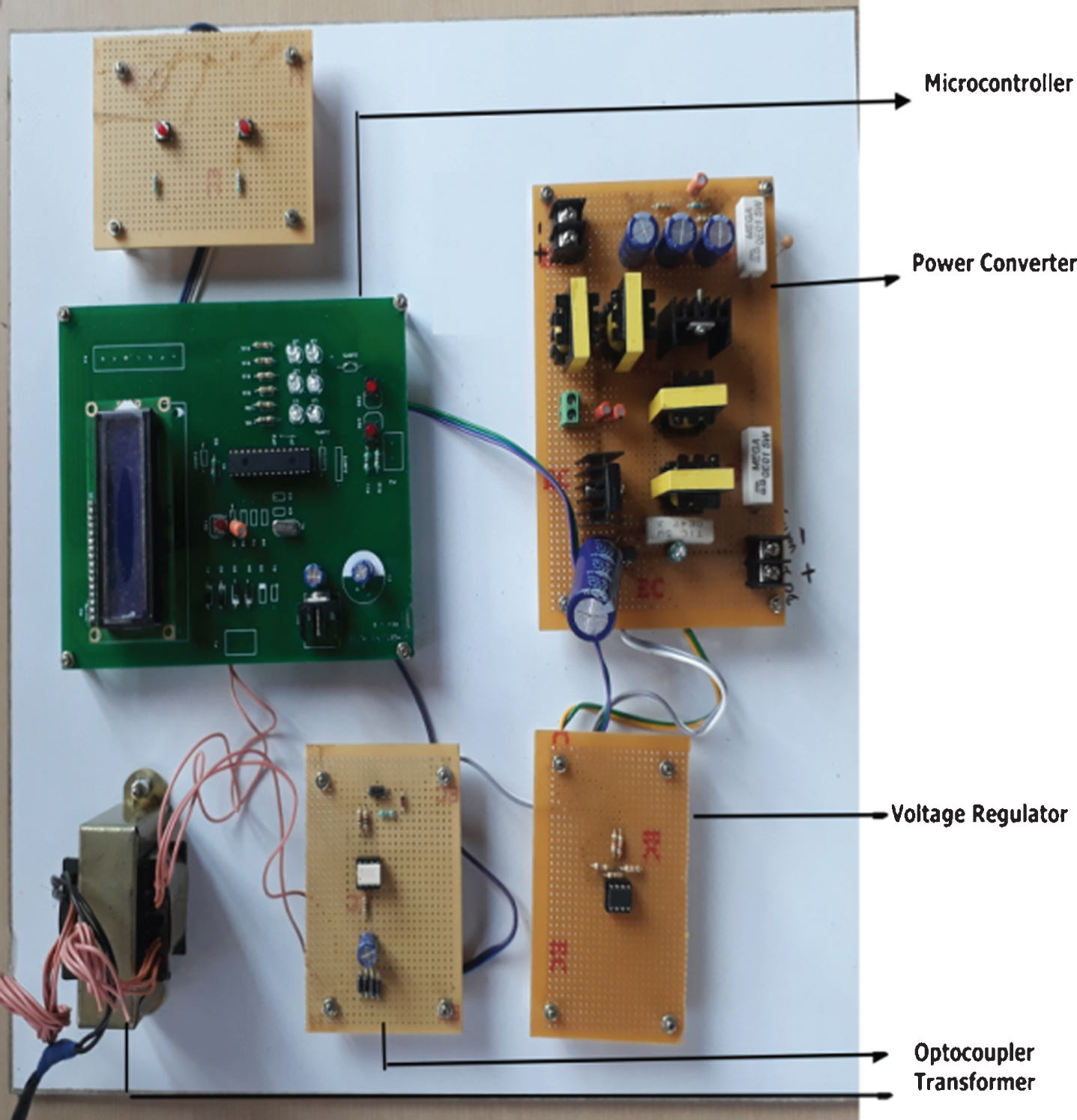
Hardware Kit.
Hardware Kit includes power converter, Voltage divider, Voltage reference generation, difference amplifier and Microcontroller. Luo converter is implemented by using ferrite core inductors L1, L2 and the electrolytic capacitors C1, C2 and the power switch MOSFET IRF250 is used for high frequency switching operation. TLP250 is used as driver IC for the soft switch. Microcontroller Dspic30f2010 is used for closed loop operation. LM365 used as sensing IC. The converter is designed for continuous conduction mode. The following hardware results are taken by using the PI parameter optimized by Cuckoo search algorithm. Power rating of hardware circuit is 12 W. Input and Output voltage rating is 12 V and 48 V respectively.
Figure 14 shows the hardware output of gate pulse, output voltage and load current wave forms. 80% of duty cycle is used for gate pulse. Input voltage is applied for the converter is 12 V, and the corresponding output voltage is 48 V.
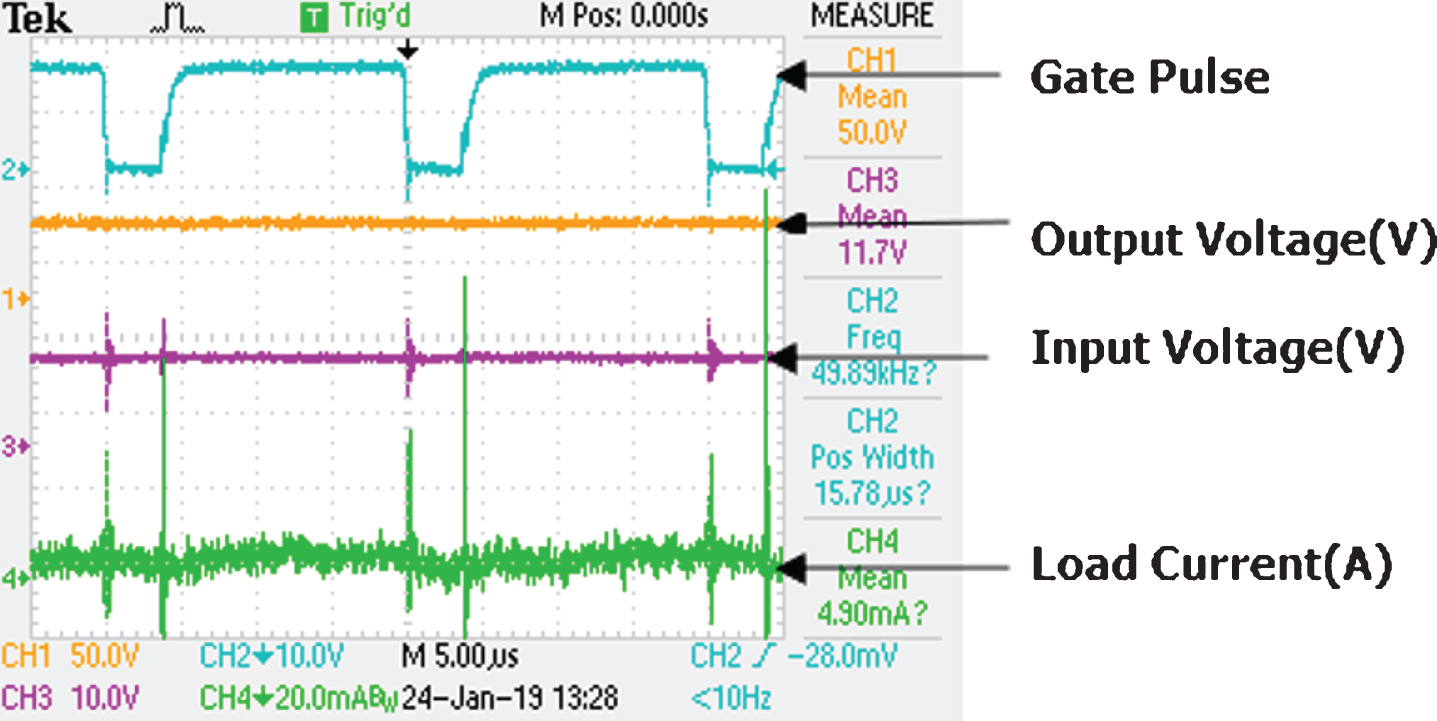
Gate pulse, Output Voltage and Load Current.
Regulatory response for the load variation is given in Fig. 15. Load resistance is increased by 20% at 1.8 s, after that 20% of load resistance is decreased at 5 s. The converter feels the disturbance but settle downs quickly.
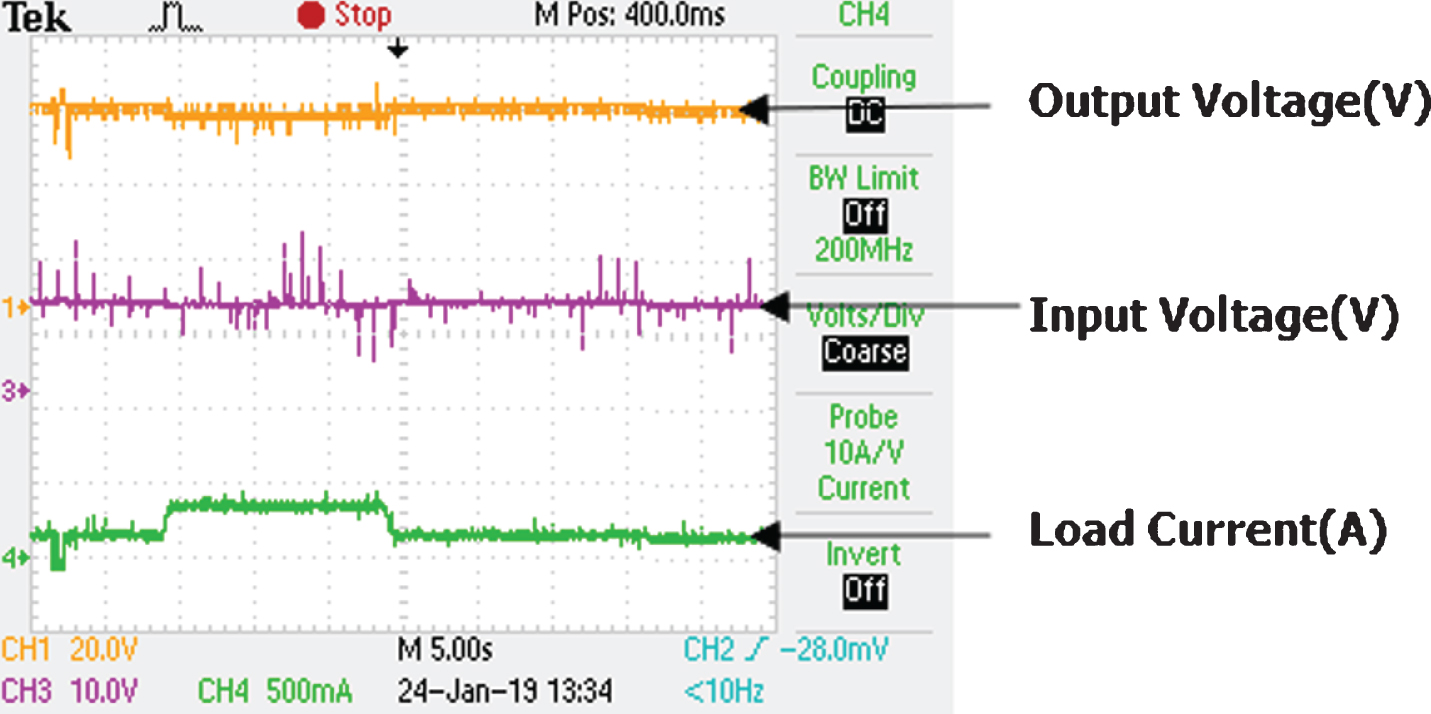
Regulatory response for load disturbance.
Servo Response of the converter by changing the reference voltage from 48 V to 43Vat 3.2 s, again 43 V to 48 V at 6.2 s then 48 V to 53 V at 8.2 s is shown in Fig. 16.
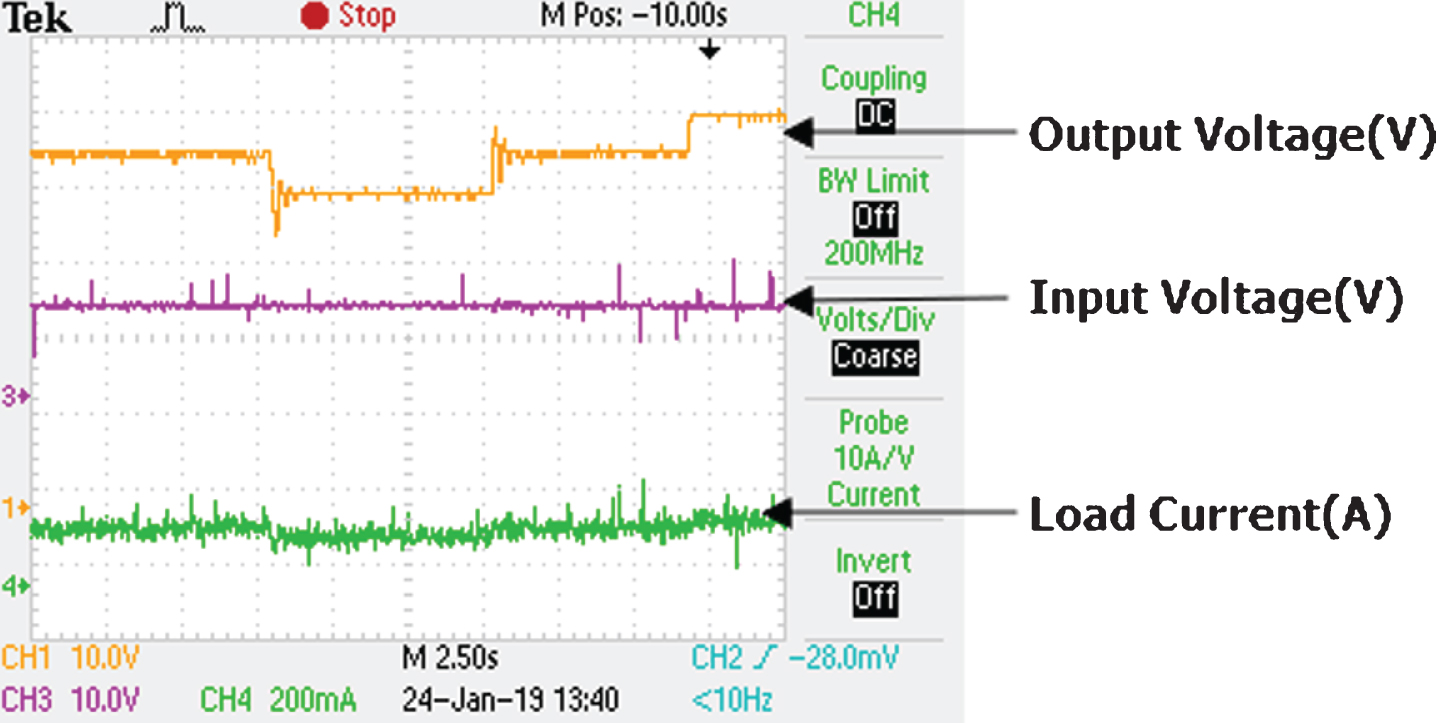
Servo Response of the converter.
Output waveform of source voltage increased by 20% at 0.8 s then 50% at 3.8 s and the corresponding regulatory output Voltage presented in Fig. 17. Inductor current L1, Inductor current L2,and gate pulse waveforms are displayed in Fig. 18.
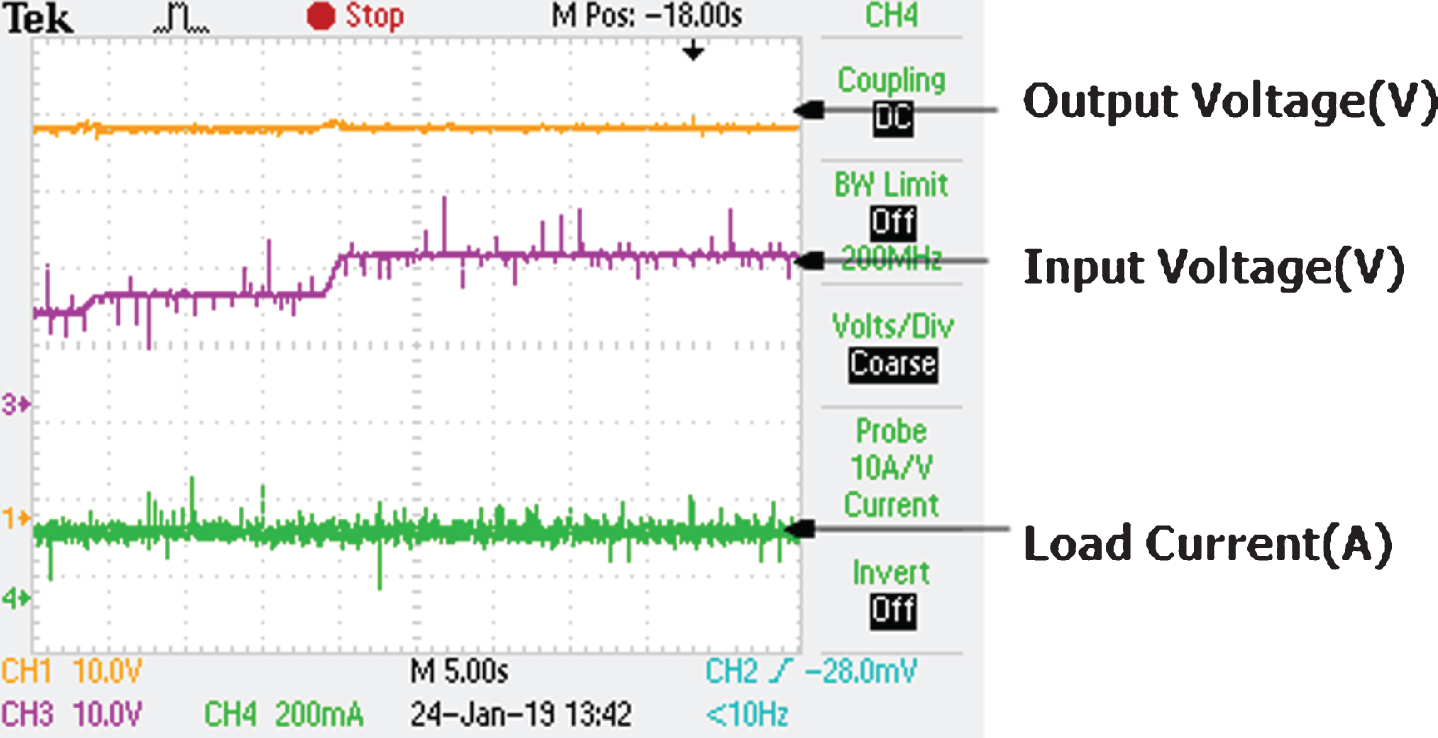
Regulatory response for source voltage disturbance.
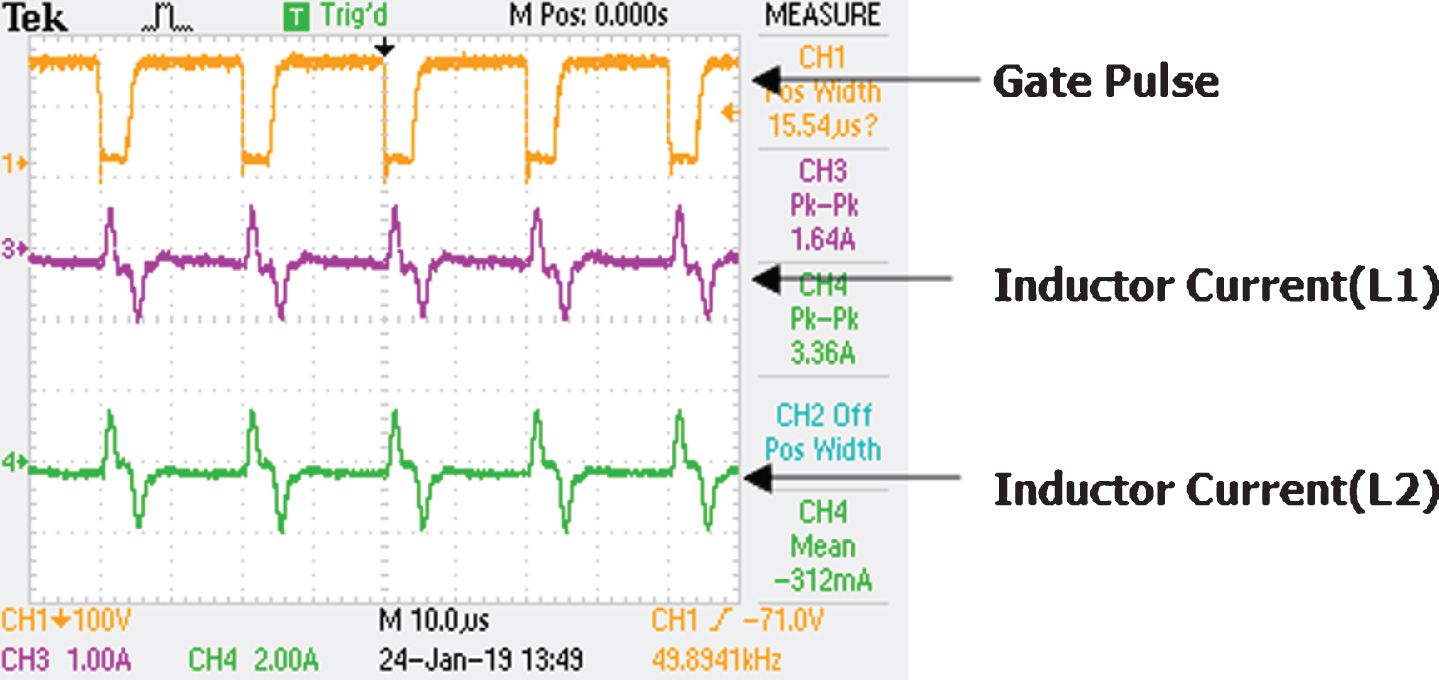
Gate pulse, L1Inductor current, L2 Inductor current.
In this paper the converter is designed using PI controller with Cuckoo Search Optimization and Crow Search Optimization algorithms. It has been shown that parameters tuned by Cuckoo Search Optimization provide smooth set point tracking for desired output voltage. It rejects both line and load disturbances with better performance criteria. The simulation results are tested by hardware design and Implementation. These converters are suitable and convenient in SMPS applications with low ripples.